1. Introduction
Computational fluid dynamics (CFD) has become a very powerful tool in analyzing engineering problems in recent decades, such as the performance prediction of marine propellers. The widest application is achieved by solving the Reynolds averaged Navier–Stokes (RANS) equations because compared with other approaches, such as direct numerical simulation (DNS) or large eddy simulation (LES), the RANS method is much cheaper with reasonable accuracy. To solve the Reynolds stress terms in the RANS equations, turbulence models based on the Boussinesq hypothesis are introduced to simplify this problem. Among them the most popular ones are the
and
series models. Since these turbulence models are built on the assumption that the resolved flow field is fully turbulent, they are incapable of predicting the transition phenomenon which is frequently encountered in physical problems. In order to improve the potential of the currently existing turbulence models for resolving transitional flows, a lot of efforts have been made to develop models which can predict the transition process from laminar to turbulent flows. There are generally two ways of achieving this: one is to couple the transition correlations, which are obtained from available experimental data, into the turbulence models; the other is to solve additional transport equations to account for the transitional effects. However, even if a transition model is successfully developed, it is still questionable whether it can be implemented into modern CFD codes which are usually based on unstructured grids and parallel execution, as most transition models are still using nonlocal variables or integral terms. Single-point models which use only local variables are required for a general application. In ANSYS Fluent, there are two transition models available, i.e., the three-equation
and four-equation
models. Both models introduce additional transport equations to include the transitional effects in flows. The present work aims to test the capabilities of these two transition models in the prediction of the hydrodynamic characteristics of a rim-driven thruster. As it has been confirmed in the research of Kuiper [
1], on the propeller of model scale, there is often a large area of laminar flow on both sides of the blade surface. In order to investigate the potential reason for the discrepancy between simulations and experiments, especially at high loading conditions, Wang and Walters [
2] employed the Loci/CHEM flow solver to study the marine propeller 5168 using the
transition model. The SST
turbulence model was also used for comparison. The simulation results were analyzed and compared with experimental data. It was found that the transition model showed better performance in resolving the flow field and therefore improved the prediction accuracy, while the standard SST
model indicated an excessive dissipation of vortex cores. Pawar and Brizzolara [
3] investigated the propeller of an autonomous underwater vehicle (AUV) which often operates at low Reynolds number in the laminar-to-turbulent transition region. The global and local hydrodynamic characteristics of open and ducted propellers were investigated with the
transition model. The results demonstrated that the transition model was able to predict complex flow physics such as leading-edge separation, tip leakage vortex, and the separation bubble on the outer surface of the duct.
Baltazar et al. [
4] examined the open-water performance of a conventional marine propeller under different Reynolds numbers using the SST
turbulence model and the
transition model. They found that the inlet quantities had different influences on the two models, with the
transition model being highly dependent on flow quantities while the SST
turbulence model was hardly affected. Therefore, the correct information on the turbulence intensity and eddy viscosity was necessary to improve the prediction accuracy. In the
transition model proposed by Menter et al. [
5], two important parameters in the transport equation of the intermittency
were kept proprietary, namely,
and
, which controlled the length of the transition region and the onset location of the transition, respectively. In order to tackle this issue, Suluksna et al. [
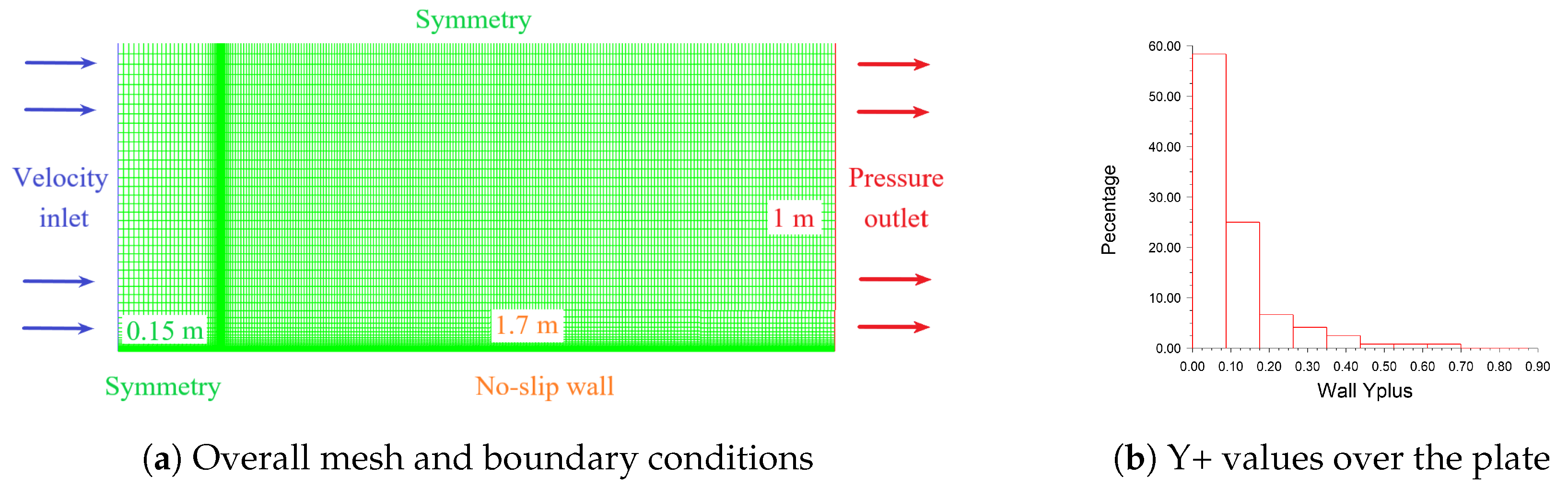
6] proposed some mathematical expressions for these specific parameters to close the model, which were assumed to be valid for both natural and bypass transition in boundary layers with and without pressure gradient. Afterwards, several test cases were carried out on a transitional flow over a flat plate and the results were compared with experimental data. Generally, the model with the proposed parameters showed a reasonable agreement with the experiment.
The RDT resembles a ducted propeller in structural design as both contain a propeller and a duct. But unlike a ducted propeller, there is no tip clearance for the RDT propeller. Instead, a gap channel is formed by the rim and duct surfaces. The scheme of an RDT layout is presented in
Figure 1 [
7]. Depending on whether there is a central hub or not, the RDT can be roughly classified into a hub type and a hubless type, as shown in
Figure 2. Both types have their own advantages and disadvantages [
8]. For example, the hub-type RDT has a greater structural strength, and bearings can be installed in the hub to reduce friction. While the hubless type has a simpler structure and a higher hydrodynamic efficiency. Due to the appealing potential the RDT system possesses, many research studies have been conducted on the modeling and evaluation of RDTs. Dubas et al. [
9] employed the OpenFOAM solver for the study of rotor–stator interaction. Song et al. [
10] compared the open-water performance between the hub and hubless type of RDTs using numerical simulations. Cai et al. [
11] numerically analyzed the performance of an RDT and considered the effect of the rim length. Gaggero [
12] adopted a RANS method to optimize the propeller blade in an RDT in order to improve its hydrodynamic efficiency and cavitation performance. Liu and Vanierschot [
7] and Liu et al. [
13] compared the hydrodynamic performance of an RDT and a ducted propeller with the same configuration at a model scale and investigated the transitional flow on the propeller blades. The influence of the gap flow on the propeller performance was investigated by Cao et al. [
14].
For the model-scale RDT, the flow on the propeller often tends to be in a laminar or transitional regime. Therefore, transitional modeling is required to better resolve the boundary layer in order to achieve an improved hydrodynamic performance prediction. The structure of this paper is organized in this way: firstly, a brief description of the transition models used in this study is presented; then, some validation studies are carried out to test the capabilities of the transition models, followed by the results and discussion on RDT simulations.
2. Numerical Modeling
The Reynolds averaged Navier–Stokes (RANS) equations for incompressible Newtonian fluids are given by
where
is the fluid density,
is the turbulence averaged velocity component,
t is the flow time,
p is the pressure,
is the dynamic viscosity, and
is the Reynolds stress term. Based on the Boussinesq hypothesis, for incompressible fluids, the Reynolds stress can be related to the mean strain rate
and eddy viscosity as follows
where
is the turbulent viscosity and
is the Kronecker symbol.
The formulation of closure to the above equations is called turbulence modeling. Currently the most popular turbulence models in industrial applications are the two-equation ones, like the earliest model. This model has gone through many modifications to improve and extend its applicability. It has great capabilities for free-shear flows but behaves poorly in flows with adverse pressure gradient. To tackle this issue, the model by was proposed, which has better performance for flows with weak adverse pressure gradient. Again, several updates have been made to this model to enhance its performance.
2.1. SST Model
The SST
turbulence model developed by Menter [
15] is an improved version of the original
model. It has robust near wall treatment and the ability to compute flows with moderate adverse pressure gradients by combining the
model and the
model with blending functions. The transport equations for the turbulent kinetic energy
k and the specific turbulent dissipation rate
are given as
The turbulent eddy viscosity is calculated as
where
is a model constant,
S is the modulus of the mean strain rate
as defined above, and
is the blending function defined as
where
is a model constant and
y is the distance to the nearest wall. Detailed information about the definition of functions and values of model constants can be found in [
15].
2.2. Transition Model
The
transition model is a correlation-based transition model using local variables, which contains two additional transport equations, i.e., for the intermittency
and the transition onset’s momentum thickness Reynolds number
. The additional transport equations are not used to model the transition physics but to provide a framework within which empirical correlations can be made for specific cases. The first quantity, intermittency, is a measure of whether the flow is laminar or turbulent.
means a continuous laminar flow, and
means a continuous turbulent flow. Therefore, the intermittency equation is used to trigger the local transition process. The second quantity is the transition onset’s Reynolds number
, which is used to account for the nonlocal influence of the turbulence intensity on the boundary layer, as well as to relate the empirical correlation to the onset criteria in the intermittency equation. Finally, the intermittency function is coupled with the original SST
model, which is used to turn on the production term of the turbulent kinetic energy downstream of the transition location and the equation for the
can pass the information on the free-stream conditions into the boundary layer. The formulated equations for the intermittency
and transition’s momentum thickness Reynolds number
are given by:
where
and
are the source terms which control the production and destruction of the intermittency,
is the model constant and is equal to 1,
is the production term that is designed to relate the transported scalar
to the local empirical
outside the boundary layer, and
is the model constant and is equal to 10. The detailed definitions of the above terms can be found in Menter et al. [
5].
By solving the above two equations, an effective intermittency
is obtained. It is then incorporated into the transport equations for
k and
in the SST
model:
2.3. Model
Unlike the
model, the
model is a physics-based model. Three additional transport equations are solved to account for the effects of pretransition fluctuations, including the bypass and natural transitions. In this model, the concept of laminar kinetic energy
is employed, which represents the velocity fluctuations in the pretransitional regions. With the increase in turbulence intensity in the free stream, the mean velocity profiles in these regions are distorted, and more intensive streamwise fluctuations can take place, which finally break down and result in the transition process. This happens when the characteristic timescale for the turbulence production is smaller than the viscous diffusion timescale of the pretransitional fluctuations. It is assumed that the production of
is a result of the interaction between the Reynolds stresses and the mean shear. The total energy of
and
is constant, which means that when the transition occurs, the energy is transferred from
to
, i.e., a redistribution of energy. The three additional transport equations for
,
, and
are given by:
The various terms in the model equations represent production, destruction, and transport mechanisms, where
,
are, respectively, the production and destruction of turbulent kinetic energy,
and
represent the effect of bypass and natural transitions,
s and
are model constants,
and
are the damping functions, and
is the effective diffusivity. Detailed definitions of the above terms can be found in Walters and Cokljat [
16].
The SIMPLE (Semi-Implicit Method for Pressure Linked Equations) algorithm is adopted for the pressure and velocity coupling. Second-order upwind schemes are used for the discretization of momentum and turbulence terms. Moreover, the moving reference frame (MRF) approach is employed to handle the rotation of the propeller. The MRF method is a steady-state approximation for the analysis of situations involving domains that are rotating relatively to each other. Previous work showed that it gave similar results compared to the sliding-mesh method, which is computationally much more expensive [
17]. The governing equations for the flow in the selected rotating zone are solved in a relative rotating frame. Namely, the computational domain is divided into two subdomains, one which contains the rotating propeller and the other one which is fixed.
The hydrodynamic coefficients are defined as:
where
is the inflow velocity,
n is the rotational rate of the propeller,
D is the diameter of the propeller, and
J,
,
T,
,
Q and
are, respectively, the advance coefficient, the total thrust coefficient, the total thrust, the total torque coefficient, the total torque, and the efficiency.
is the pressure coefficient,
p is the local pressure,
is the free-stream pressure,
v is the effective velocity of the propeller, which is equal to
, and
(
u is the flow velocity along the blade surface,
y is the normal distance).
Based on the grid study in Liu et al. [
13] for the SST
model, in this work, the meshes used for the uncertainty evaluation included a medium mesh with a total cell number of about 18 M (million) and a fine mesh of about 25 M. To avoid the influence of a near-wall treatment due to the mesh resolution in the boundary layer, the prism mesh in both cases were kept the same. The results between different meshes for the
transition model are compared in
Table 1. It can be seen that the grid uncertainty was of the same order as the one of the SST
model and was therefore acceptable [
13]. Therefore, the medium mesh was considered to be sufficient to resolve the flow field and was adopted in subsequent simulations.
4. Conclusions
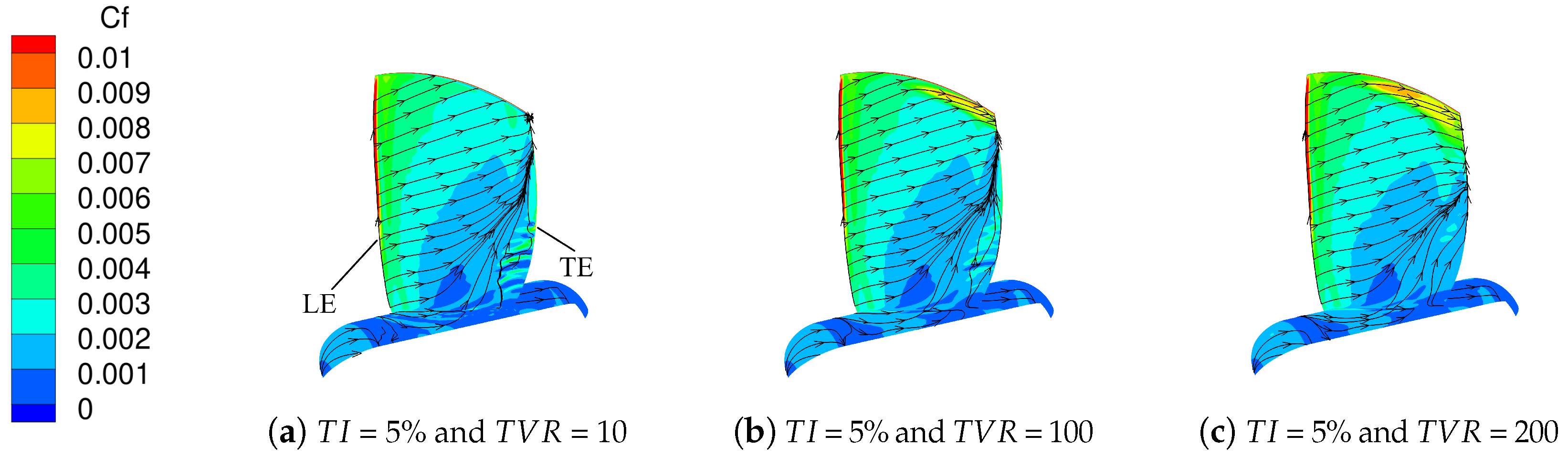
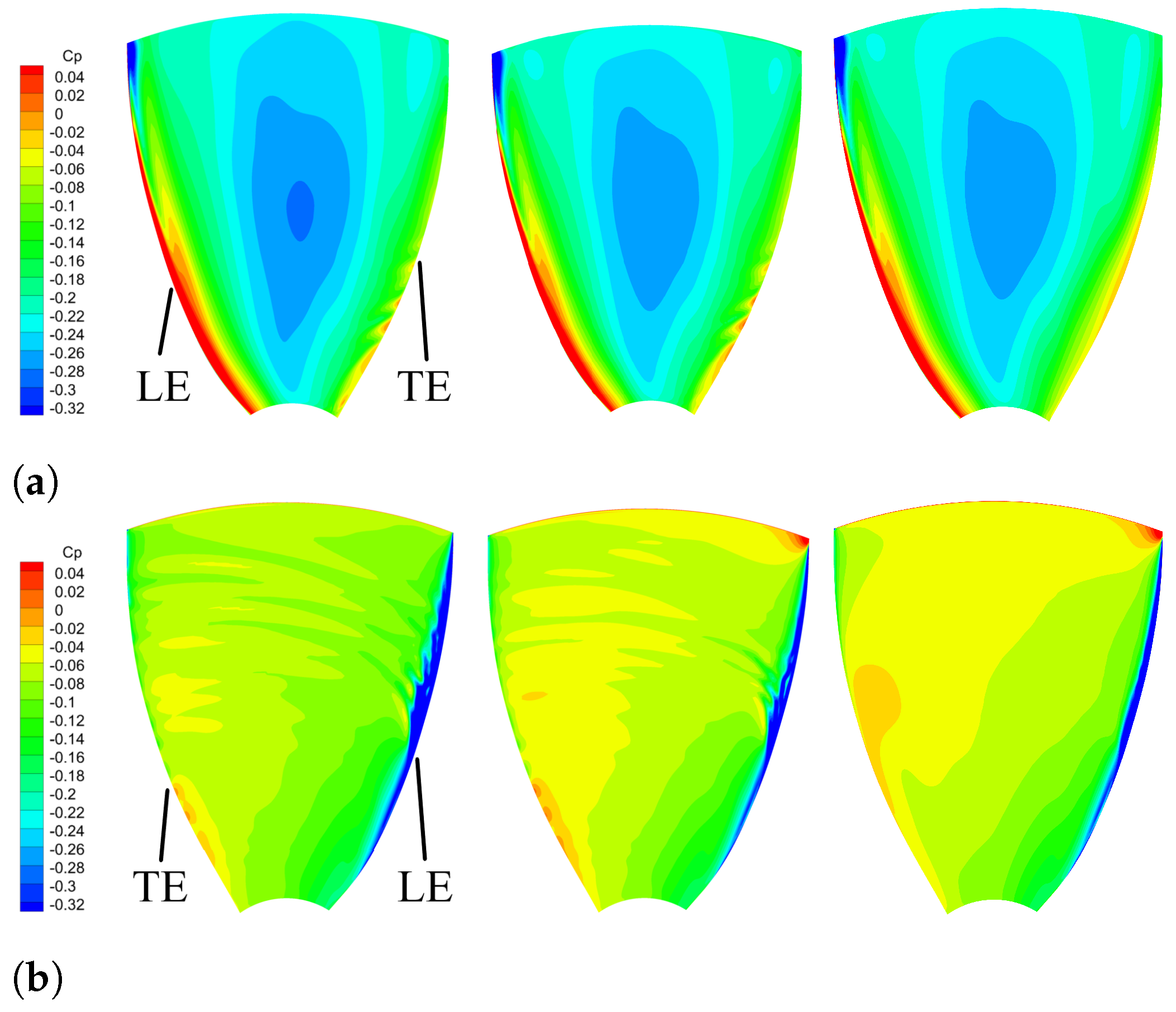
Laminar-to-turbulent transition flows are often observed on marine propellers at model scales. Accurately resolving this flow phenomenon can significantly improve the performance prediction of the propeller. In this work, the capabilities of the and transition models implemented in ANSYS Fluent’s flow solver were tested for the performance prediction of a rim-driven thruster. Different test cases were firstly considered to ensure the quality of the numerical simulations. From the validation study using a ducted propeller, it was concluded that the transition models exhibited better performance than a fullt turbulent model. The predicted thrusts of the propeller and duct, which were mainly based on the pressure contribution, were quite close using different models. However, the propeller torque was exceptional. When there were transitional flows, the transition models gave lower values for the torque due to the smaller shear stress prediction. This was a result of the laminar boundary layer, and the streamlines in that situation were more outwardly oriented due to the centrifugal acceleration. A comparison between the and transition models in the hydrodynamic performance prediction of an RDT was then conducted. From the results, it was found that there was a small difference between the two models. The predicted more local turbulent regions such as at the blade tip, and therefore, the skin friction was higher in that region than that of the model. The model predicted a higher propeller thrust, especially for the pressure component, but it is at present not certain which model is more accurate. More research is required for verification.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}