

Magnetically Suspended Control Sensitive Gyroscope Rotor High-Precision Deflection Decoupling Method using Quantum Neural Network and Fractional-Order Terminal Sliding Mode Control


Abstract
:1. Introduction
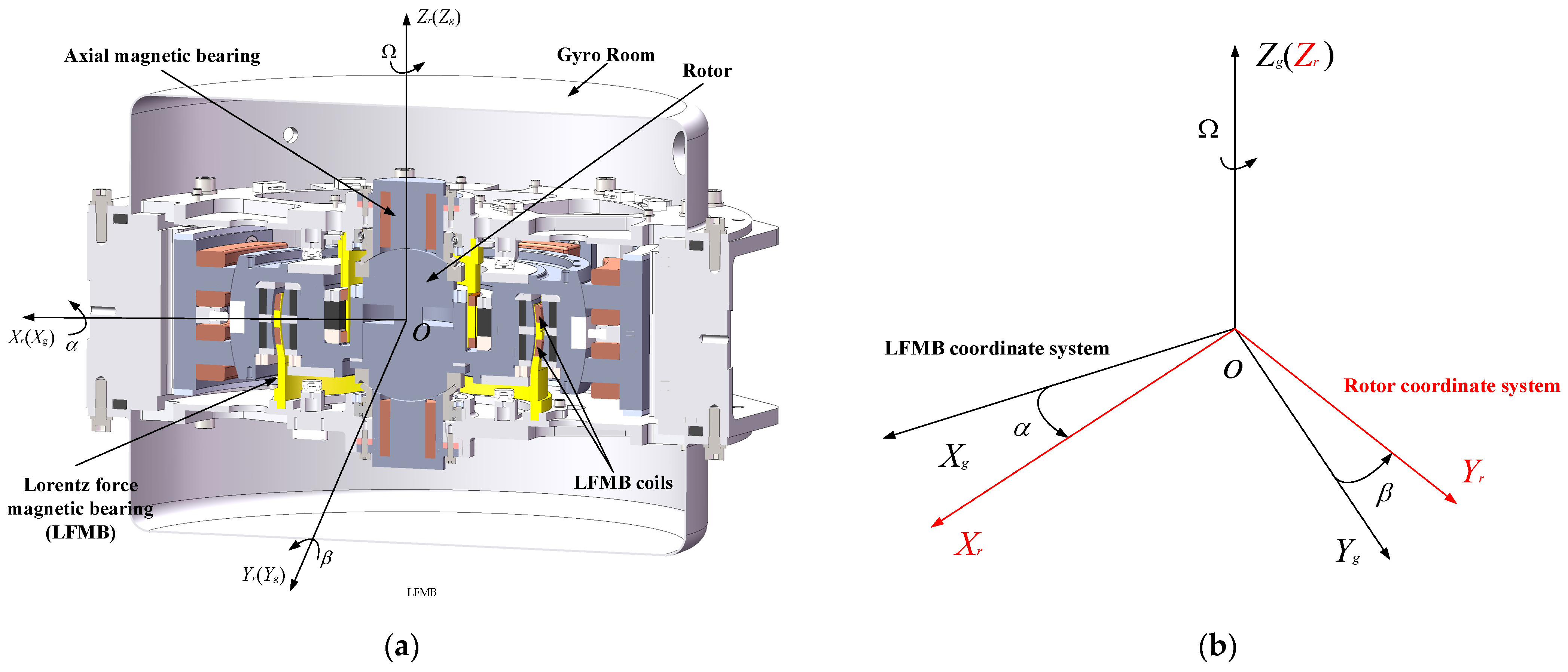
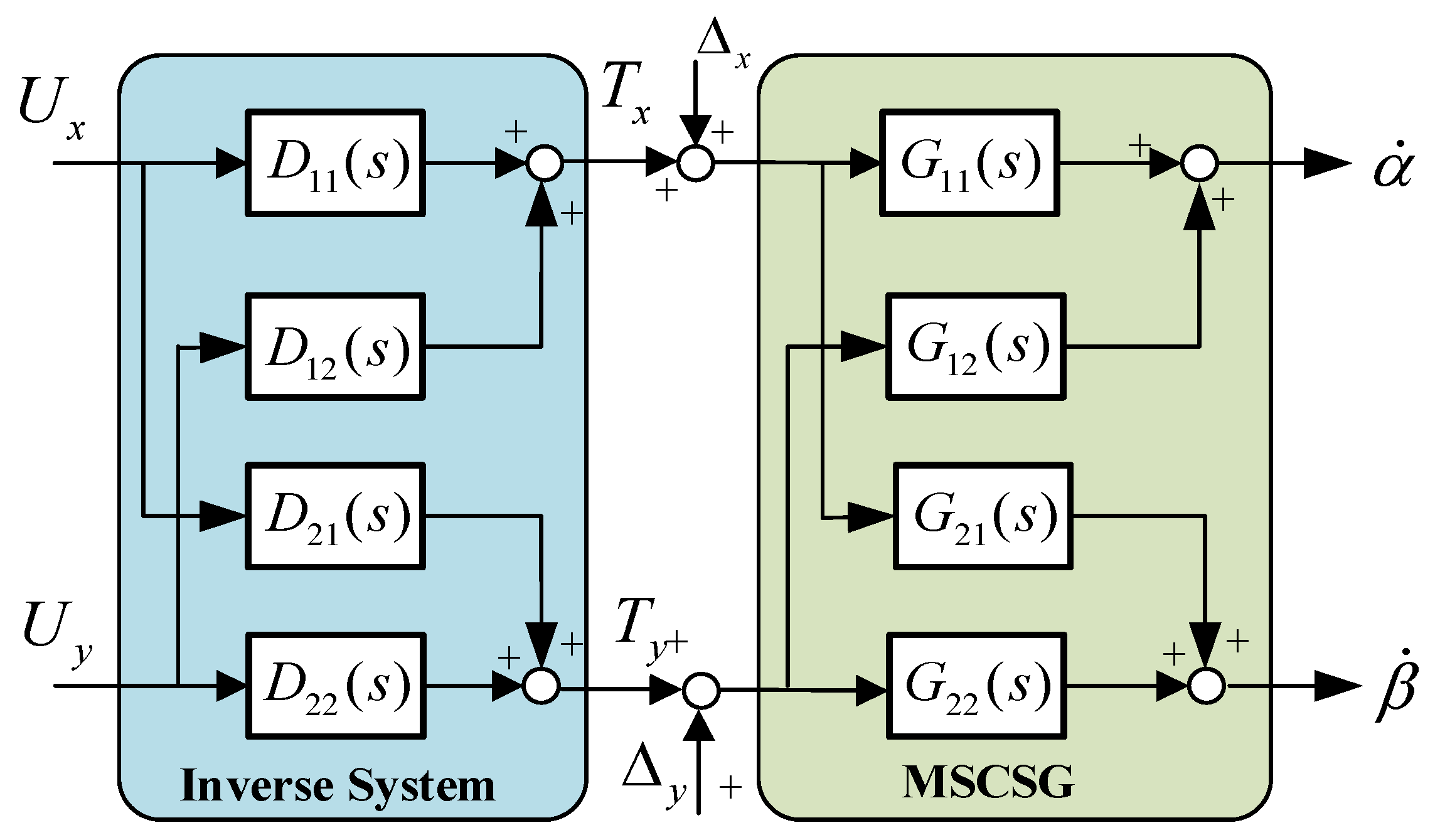
2. Dynamic Molding of In-Orbit MSCSG
3. Design of QRBF-NN and Controller
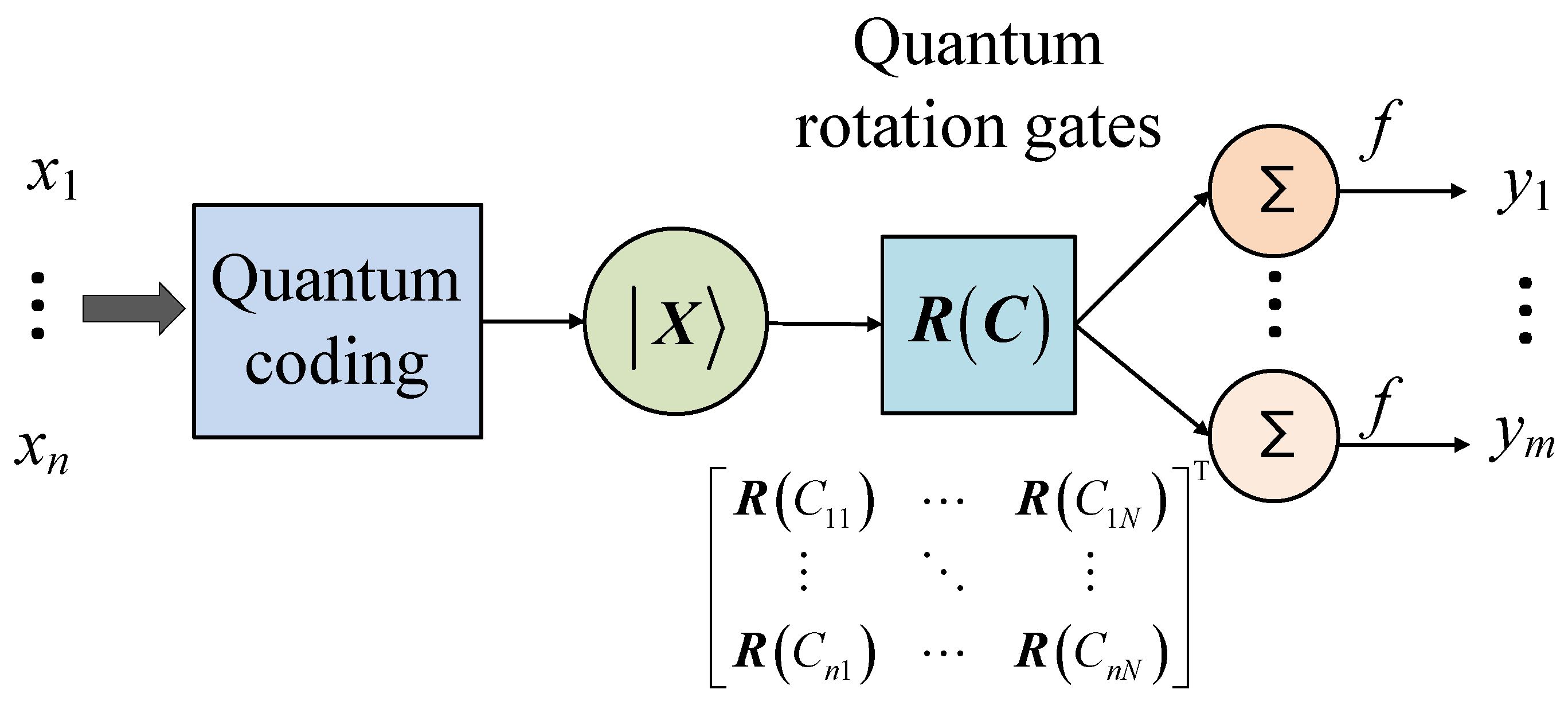
3.1. Quantum-Computing-Based Structure Optimization Method of RBF-NN
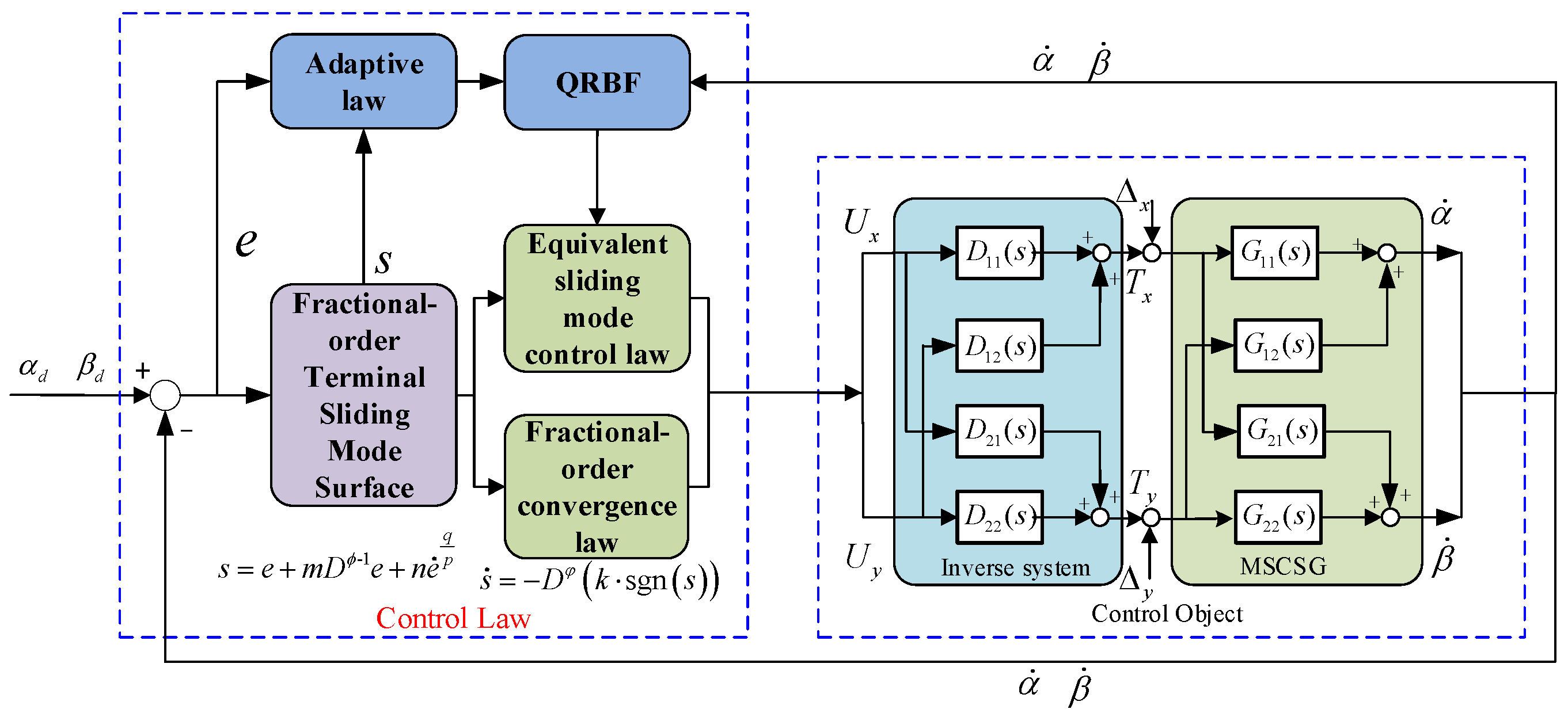
3.2. Design of Fractional-Order Terminal Sliding Mode Controller Based on QRBF-NN
4. Semi-Physical Simulation
4.1. Simulation Analysis of QRBF-NN Approximation Performance
4.2. Comparison of Control Performance for QRBF-NN and RBF-NN
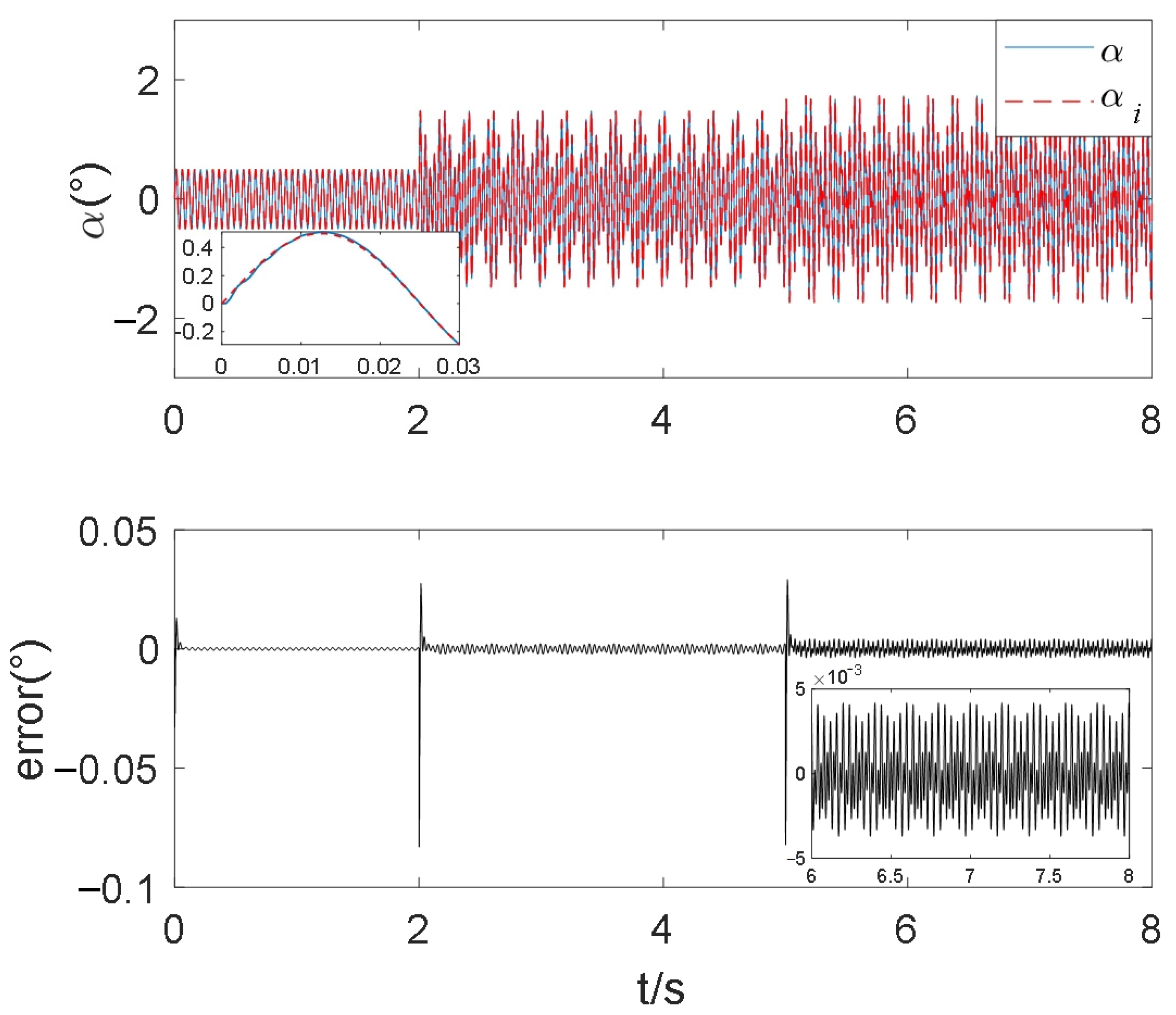
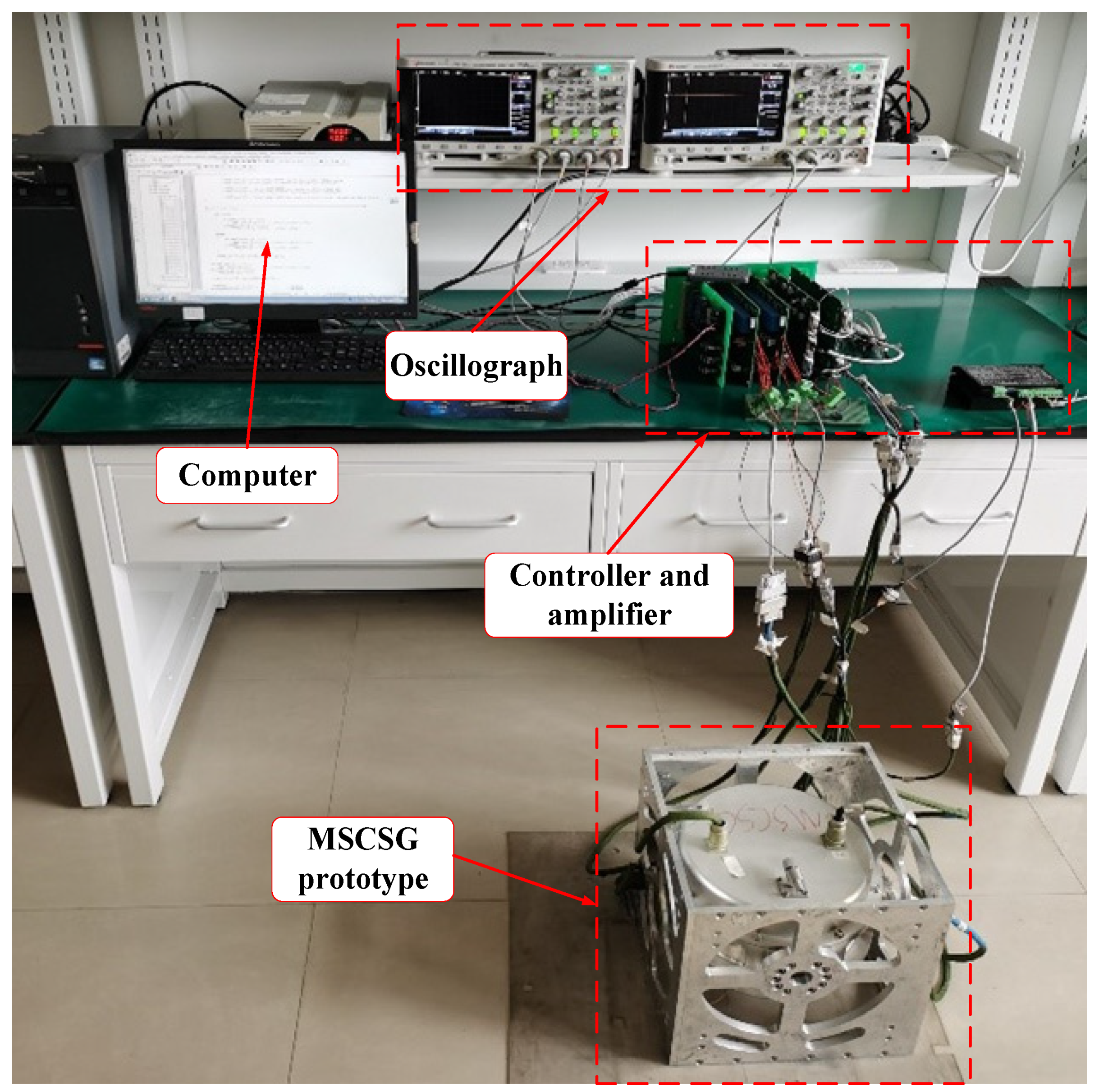
4.3. Experimental Analysis of MSCSG
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yin, Z.; Cai, Y.; Ren, Y.; Wang, W. A Measurement Method of Torque Coefficient for Magnetically Suspended Control and Sensitive Gyroscope. IEEE Sensors J. 2021, 21, 14767–14775. [Google Scholar] [CrossRef]
- Li, L.; Ren, Y.; Wang, W.; Wang, L.; Yin, Z.; Yu, C. Spacecraft Attitude Measurement and Control Integration Using a Novel Configuration of Variable Speed Magnetically Suspended Control and Sensing Gyroscope. IEEE Sensors J. 2023, 23, 9359–9369. [Google Scholar] [CrossRef]
- Numanoy, N.; Srisertpol, J. Vibration Reduction of an Overhung Rotor Supported by an Active Magnetic Bearing Using a Decoupling Control System. Machines 2019, 7, 73. [Google Scholar] [CrossRef]
- Barambones, O.; Alkorta, P. Position Control of the Induction Motor Using an Adaptive Sliding-Mode Controller and Observers. IEEE Trans. Ind. Electron. 2014, 61, 6556. [Google Scholar] [CrossRef]
- Liu, X.; Ma, X.; Zheng, S.; Zhou, J.; Chen, Y. Feedback Linearization and Robust Control for Whirl Mode with Operating Point Deviation in Active Magnetic Bearings-Rotor System. IEEE Trans. Ind. Electron. 2022, 70, 7673–7682. [Google Scholar] [CrossRef]
- Wang, X.; Dai, X. An Improving Method to Decoupling and Linearization of Induction Motor Based on Neural Network Inverse. Trans. China Electrotech. Soc. 2018, 10, 4–31. [Google Scholar]
- Chen, X.; Ren, Y.; Wang, W.; Cai, Y. Rotation Modes Stability Analysis and Phase Compensation for Magnetically Suspended Flywheel Systems with Cross Feedback Controller and Time Delay. Math. Probl. Eng. 2016, 2016, 3783740. [Google Scholar]
- Xia, C.; Cai, Y.; Ren, Y.; Wu, D.; Wang, Y. Feedforward decoupling and internal model control for rotor of magnetically suspended control and sensing gyroscope. J. Beijing Univ. Aeronaut. Astronaut. 2017, 44, 480–488. [Google Scholar]
- Wang, P.; Wang, H.; Ren, Y. Decoupling Control and Disturbance Rejection of Radial Rotor System in Magnetically Suspended Control Moment Gyro Based on ADRC. Ordonance Ind. Autom. 2015, 34, 59–63. [Google Scholar]
- Li, L.; Ren, Y.; Chen, X.; Yin, Z. Design of MSCSG control system based on ADRC and RBF neural network. J. Beijing Univ. Aeronaut. Astronaut. 2020, 46, 1966–1972. [Google Scholar]
- Chu, M.; Chen, G.; Huang, F.J.; Jia, Q.X. Active Disturbance Rejection Control for Trajectory Tracking of Manipulator Joint with Flexibility and Friction. Appl. Mech. Mater. 2013, 325–326, 1229–1232. [Google Scholar] [CrossRef]
- Zhang, H.; Zhao, S.; Gao, Z. An active disturbance rejection control solution for the two-mass-spring benchmark problem. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016. [Google Scholar]
- Jin, H.; Chen, Y.; Lan, W. Linear Active Disturbance Rejection Control with Partially Canceling Estimated Total Disturbance. In Proceedings of the IEEE International Conference on Real-Time Computing and Robotics, Irkutsk, Russia, 4–9 August 2019. [Google Scholar]
- Zhang, X.; Su, H.; Lu, R. Second-Order Integral Sliding Mode Control for Uncertain Systems with Control Input Time Delay Based on Singular Perturbation Approach. IEEE Trans. Autom. Control. 2015, 60, 3095–3100. [Google Scholar] [CrossRef]
- Dou, Z.; Yang, L.; Ren, Z. Decoupling control of maglev rotor’s gyro effect supported by nonlinear force. Mech. Sci. Technol. Aerosp. Eng. 2023, 42, 1392–1401. [Google Scholar] [CrossRef]
- Zheng, C. Research on Unbalance Disturbance Control Method of Magnetic Bearing Rotor System Aboard Satellite; Harbin Institute of Technology: Harbin, China, 2022. [Google Scholar]
- Wang, H.; Zhao, B. Terminal Sliding Mode Control of Magnetic Suspend Flywheel. Mech. Electr. Eng. Technol. 2016, 45, 26–29. [Google Scholar]
- Luo, Y.; Chao, H.; Di, L.; Chen, Y. Lateral directional fractional order (PI)π control of a small fixed-wing unmanned aerial vehicles: Controller designs and flight tests. Control. Theory Appl. Iet 2011, 5, 2156–2167. [Google Scholar] [CrossRef]
- Lanusse, P.; Benlaoukli, H.; Nelson-Gruel, D.; Oustaloup, A. Fractional-order control and interval analysis of SISO systems with time-delayed state. IET Control. Theory Appl. 2008, 2, 16–23. [Google Scholar] [CrossRef]
- Zhang, S.; Zhou, Y.; Cai, S. Fractional-Order PD Attitude Control for a Type of Spacecraft with Flexible Appendages. Fractal Fract. 2022, 6, 601. [Google Scholar] [CrossRef]
- Yu, Y.; Liu, X. Model-Free Fractional-Order Sliding Mode Control of Electric Drive System Based on Nonlinear Disturbance Observer. Fractal Fract. 2022, 6, 603. [Google Scholar] [CrossRef]
- Delghavi, M.B.; Shoja-Majidabad, S.; Yazdani, A. Fractional-Order Sliding-Mode Control of Islanded Distributed Energy Resource Systems. IEEE Trans. Sustain. Energy 2016, 7, 1482–1491. [Google Scholar] [CrossRef]
- Peng, H.; Wu, J.; Inoussa, G.; Deng, Q.; Nakano, K. Nonlinear system modeling and predictive control using the RBF nets-based quasi-linear ARX model. Control. Eng. Pr. 2009, 17, 59–66. [Google Scholar] [CrossRef]
- Seng, T.L.; Khalid, M.; Yusof, R.; Omatu, S. Adaptive Neuro-fuzzy Control System by RBF and GRNN Neural Networks. J. Intell. Robot. Syst. 1998, 23, 267–289. [Google Scholar] [CrossRef]
- Lee, R.; Chen, I.Y. The Time Complexity Analysis of Neural Network Model Configurations. In Proceedings of the 2020 International Conference on Mathematics and Computers in Science and Engineering, Madrid, Spain, 14–16 January 2020. [Google Scholar]
- Narayanan, A.; Menneer, T. Quantum artificial neural network architectures and components. Inf. Sci. 2000, 128, 231–255. [Google Scholar] [CrossRef]
- Nguyen, N.; Behrman, E.; Moustafa, M.; Steck, J. Benchmarking Neural Networks for Quantum Computations. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 2522–2531. [Google Scholar] [CrossRef]
- Panchi, L.; Shiyong, L. Learning algorithm and application of quantum BP neural networks based on universal quantum gates. J. Syst. Eng. Electron. 2008, 19, 167–174. [Google Scholar] [CrossRef]
- Li, P.; Zhou, H. Model and Algorithm of Quantum Neural Network Based on the Controlled Hadamard Gates. J. Comput. Res. Dev. 2015, 52, 211–220. [Google Scholar]
- Ye, Z.; Jiang, X.; Wang, Z. Self-tuning PID controller based on quantum evolution algorithm and neural network. In Proceedings of the 2012 Japan-Egypt Conference on Electronics, Communications and Computers, Alexandria, Egypt, 6–9 March 2012; pp. 97–101. [Google Scholar]
- Liu, D. The Model of Quantum RBF Neural Network and Its Application; Nanjing University of Posts and Telecommunications: Nanjing, China, 2013. [Google Scholar]
- Shao, C. Quantum speedup of training radial basis function networks. Quantum Inf. Comput. 2019, 19, 609–625. [Google Scholar] [CrossRef]
- Park, J.; Sandberg, I.W. Universal Approximation Using Radial-Basis-Function Networks. Neural Comput. 1991, 3, 246–257. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bandwidth | Network Type | Min (s) | Mean (s) | RMSE |
|---|---|---|---|---|
| 1 Hz | RBF | 0.003261 | 0.003677 | 6.55 × 10−8 |
| QRBF | 0.001778 | 0.001778 | 3.50 × 10−24 | |
| 10 Hz | RBF | 0.031547 | 0.043651 | 2.41 × 10−8 |
| QRBF | 0.017781 | 0.017780 | 4.72 × 10−22 | |
| 100 Hz | RBF | 0.249943 | 0.299523 | 0.001202 |
| QRBF | 0.178042 | 0.178041 | 7.52 × 10−20 |
| Bandwidth | Network Type | Min (s) | Mean (s) |
|---|---|---|---|
| 1 Hz | RBF | 2.1199415 | 2.212232405 |
| QRBF | 0.9361242 | 1.034356325 | |
| 10 Hz | RBF | 2.1611742 | 2.28721176 |
| QRBF | 0.9521237 | 1.03840404 | |
| 100 Hz | RBF | 2.1957421 | 2.385841465 |
| QRBF | 0.9530300 | 1.03328098 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Jx (kg·m2) | 0.0097 | Ω (r/min) | 5000 |
| Jy (kg·m2) | 0.0097 | m (kg) | 8.95 |
| Jz (kg·m2) | 0.0166 | k | 1.2 |
| m | 0.3 | n | 0.5 |
| p | 13 | q | 9 |
| Method | Settling Time | Overshoot | Decoupling Performance |
|---|---|---|---|
| RBF-NN and ADRC | 2.2 s | 22% | Residual coupling |
| QRBF-NN and SMC | 0. 63 s | None | Fully decoupled |
| QRBF-NN and FOSMC | 0.59 s | None | Fully decoupled |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, Y.; Li, L.; Wang, W.; Wang, L.; Pang, W. Magnetically Suspended Control Sensitive Gyroscope Rotor High-Precision Deflection Decoupling Method using Quantum Neural Network and Fractional-Order Terminal Sliding Mode Control. Fractal Fract. 2024, 8, 120. https://doi.org/10.3390/fractalfract8020120
Ren Y, Li L, Wang W, Wang L, Pang W. Magnetically Suspended Control Sensitive Gyroscope Rotor High-Precision Deflection Decoupling Method using Quantum Neural Network and Fractional-Order Terminal Sliding Mode Control. Fractal and Fractional. 2024; 8(2):120. https://doi.org/10.3390/fractalfract8020120
Chicago/Turabian StyleRen, Yuan, Lei Li, Weijie Wang, Lifen Wang, and Weikun Pang. 2024. "Magnetically Suspended Control Sensitive Gyroscope Rotor High-Precision Deflection Decoupling Method using Quantum Neural Network and Fractional-Order Terminal Sliding Mode Control" Fractal and Fractional 8, no. 2: 120. https://doi.org/10.3390/fractalfract8020120
APA StyleRen, Y., Li, L., Wang, W., Wang, L., & Pang, W. (2024). Magnetically Suspended Control Sensitive Gyroscope Rotor High-Precision Deflection Decoupling Method using Quantum Neural Network and Fractional-Order Terminal Sliding Mode Control. Fractal and Fractional, 8(2), 120. https://doi.org/10.3390/fractalfract8020120