
Differentiator- and Observer-Based Feedback Linearized Advanced Nonlinear Control Strategies for an Unmanned Aerial Vehicle System



Abstract
:1. Introduction
- Development and experimental validation of SMC, ISMC, and TSMC for the TRMS, with ISMC offering significant improvements in chattering reduction and system robustness;
- Application of feedback linearization to decouple the UAV system into horizontal and vertical subsystems for better control accuracy and stability;
- Integration of a URED for enhanced differentiation in the presence of system uncertainties and disturbances.
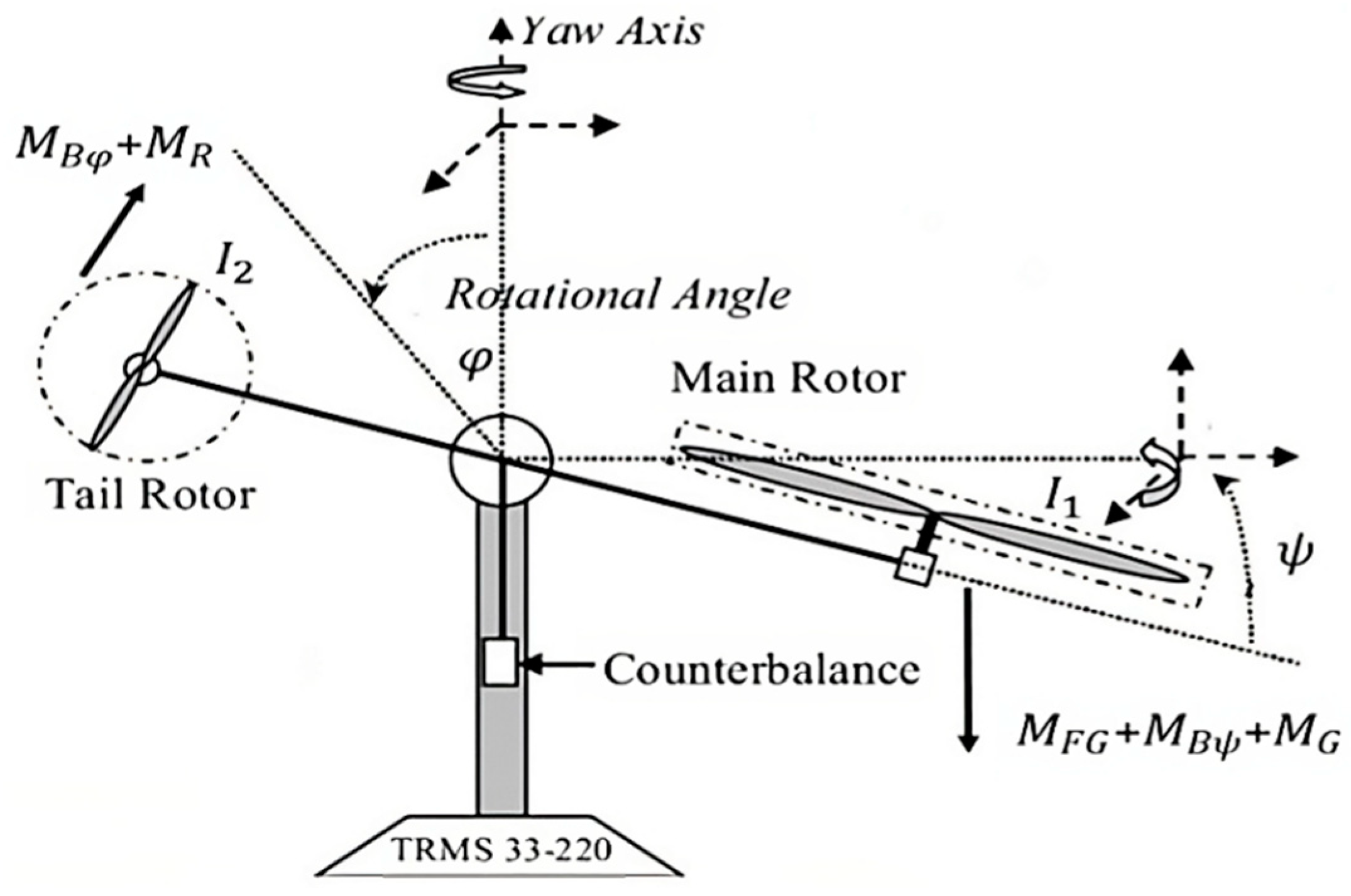
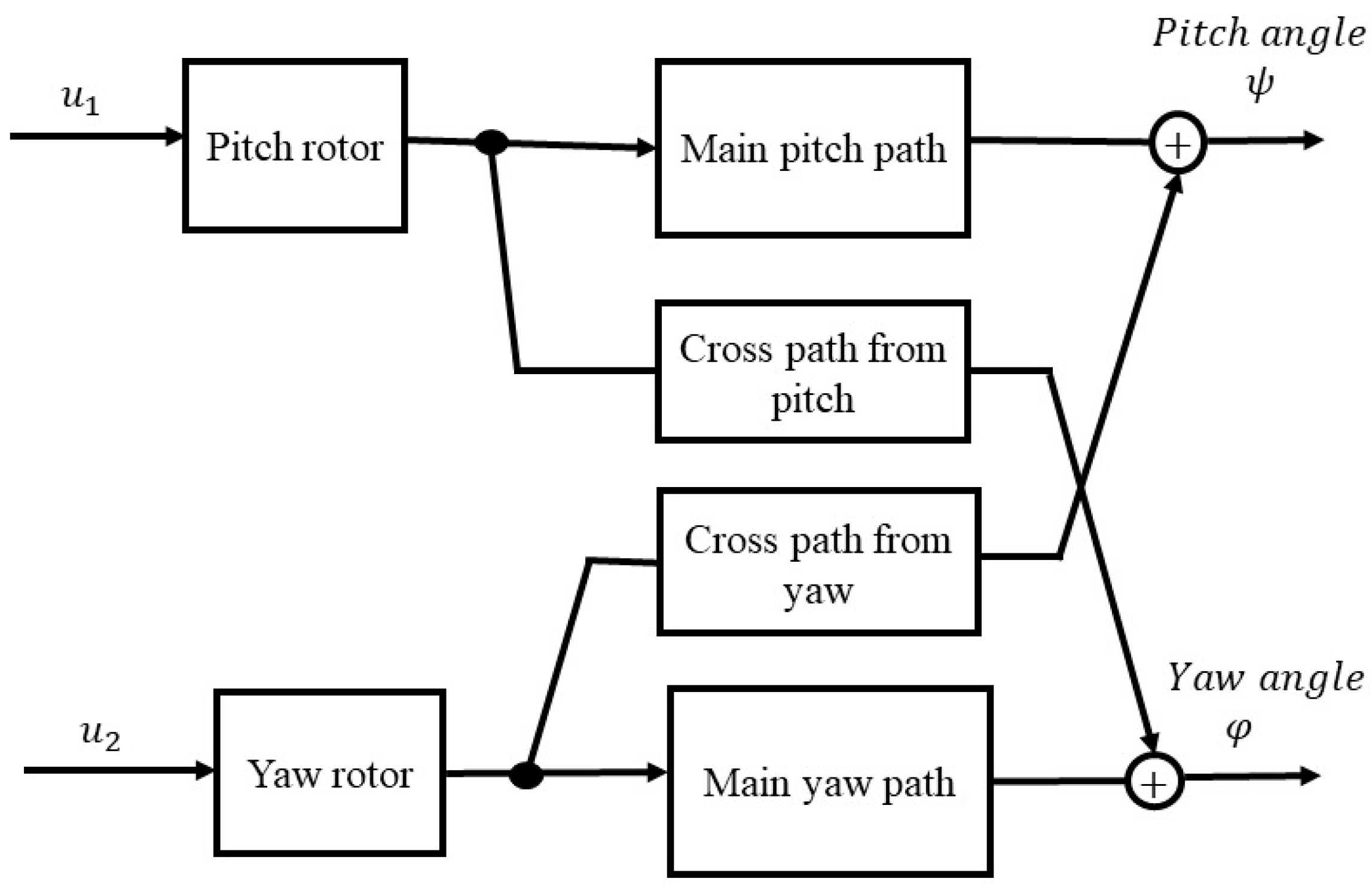
2. Mathematical Nonlinear Model
2.1. Feedback Linearization
2.1.1. Vertical Decoupled Subsystem
2.1.2. Horizontal Decoupled Subsystem
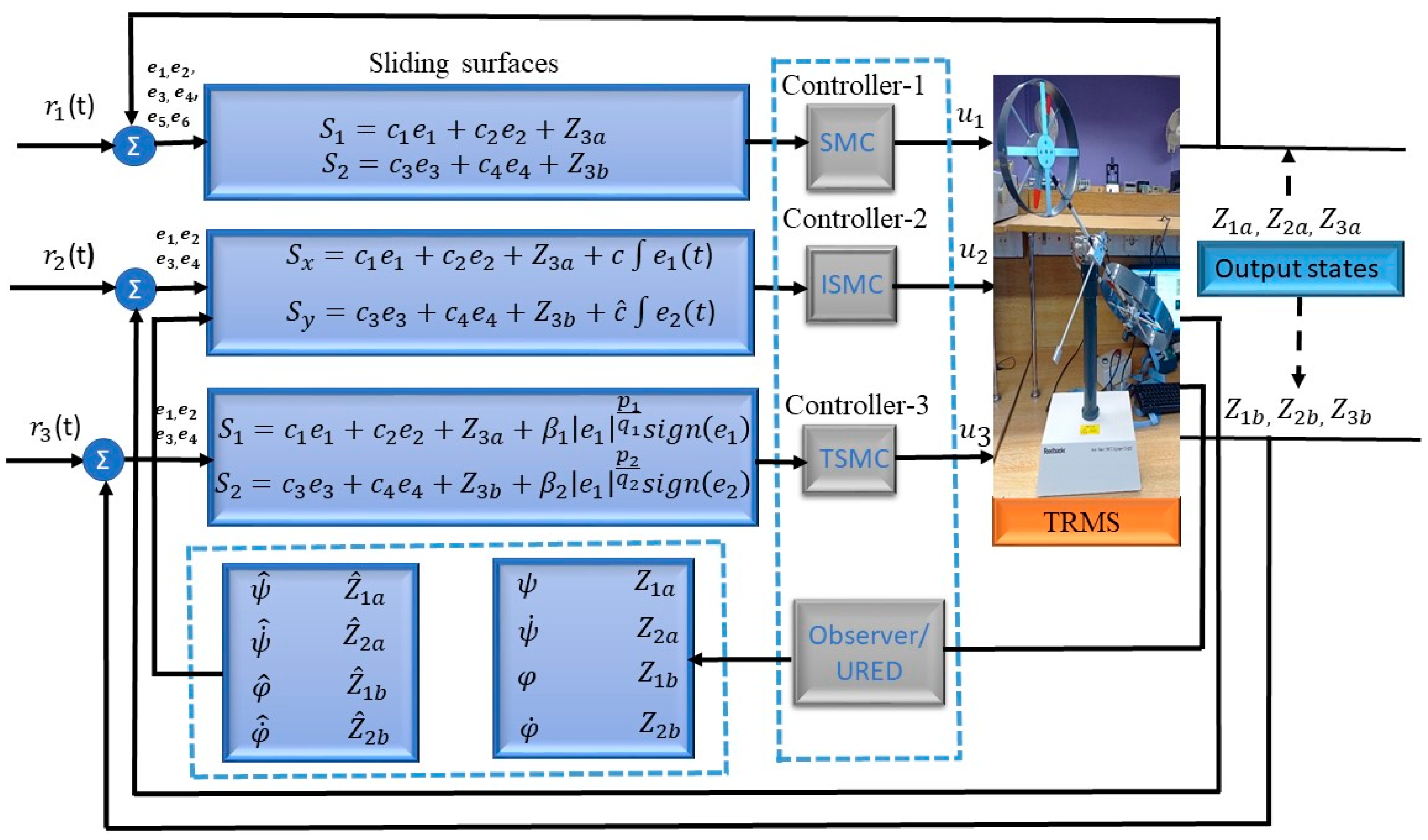
3. Robust Control Strategies
3.1. Sliding Mode Control
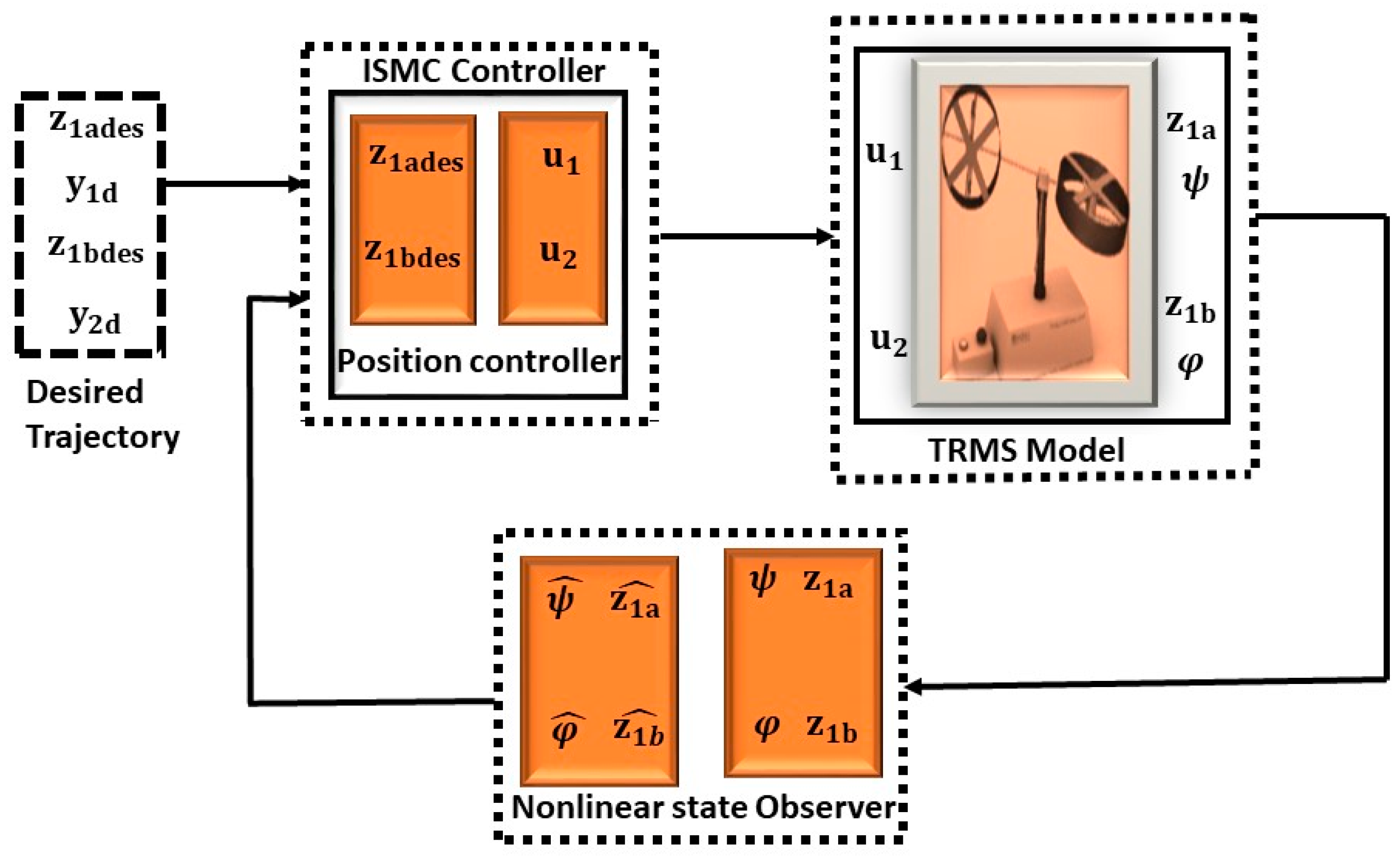
3.2. Integral Sliding Mode Control
3.3. Terminal Sliding Mode Control
3.4. Uniform Robust Exact Differentiator
Nonlinear State Feedback Observer Design Using the Luenberger Technique
4. Simulation Results
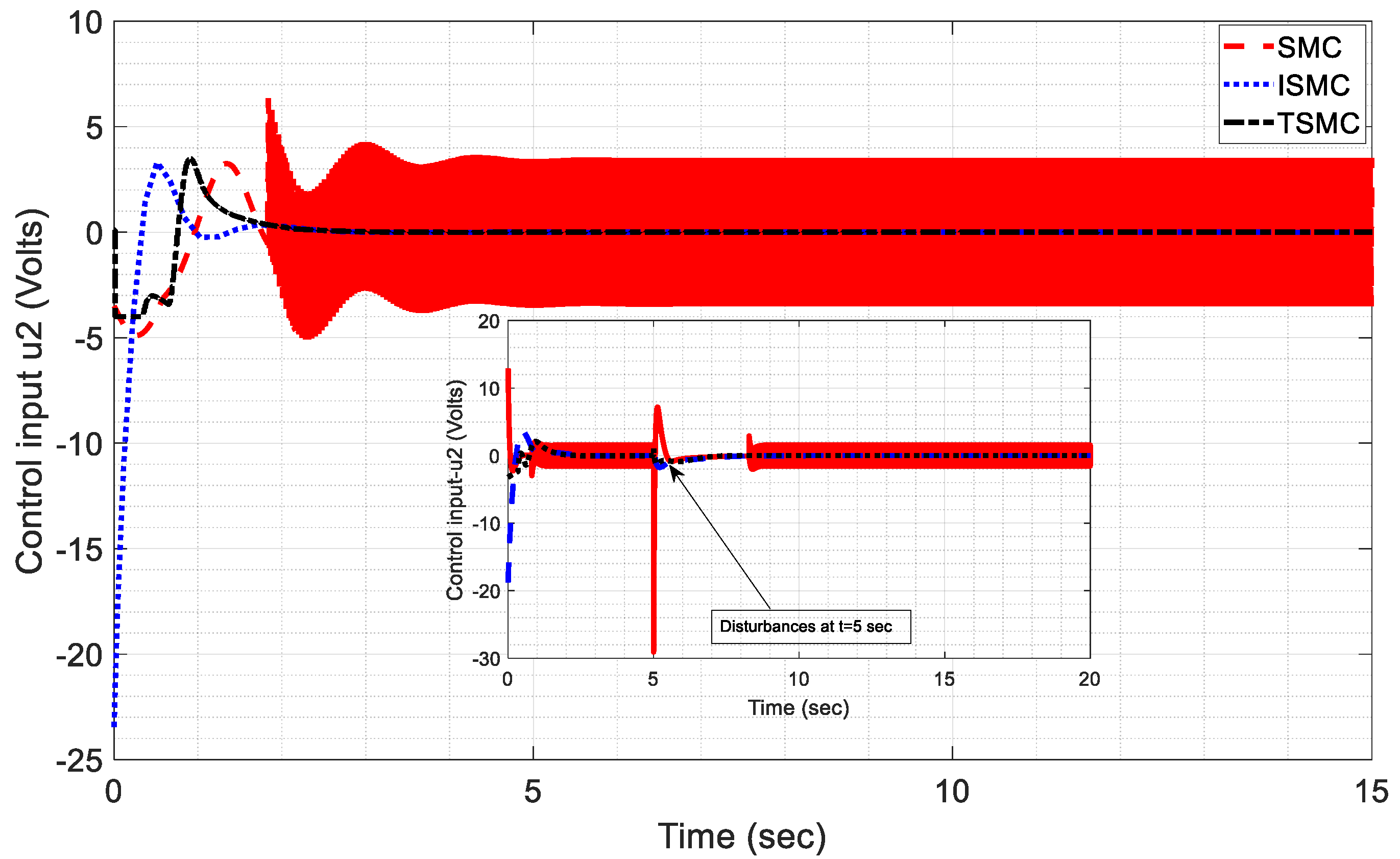
4.1. Case 1: Trajectory Tracking with Disturbances
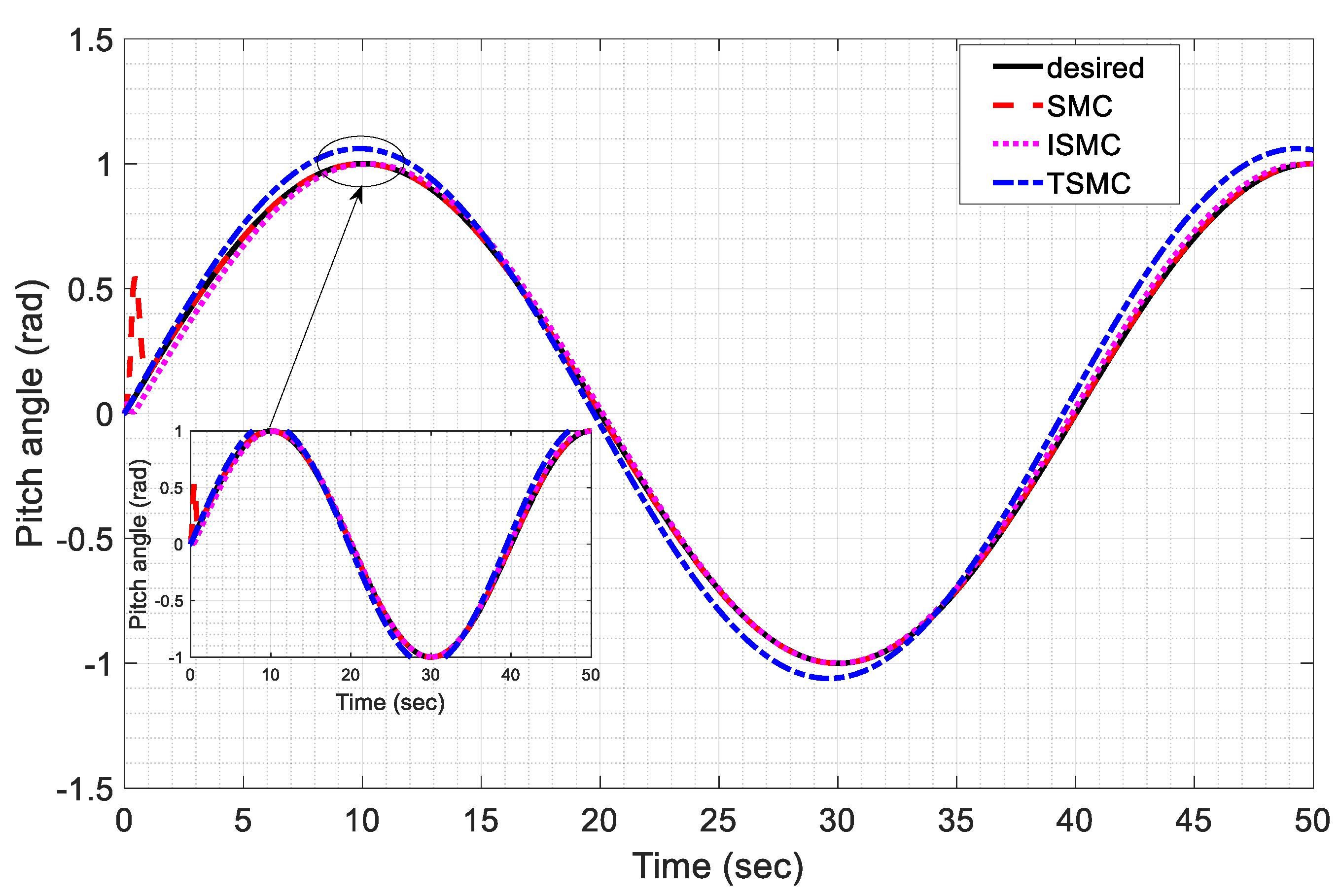
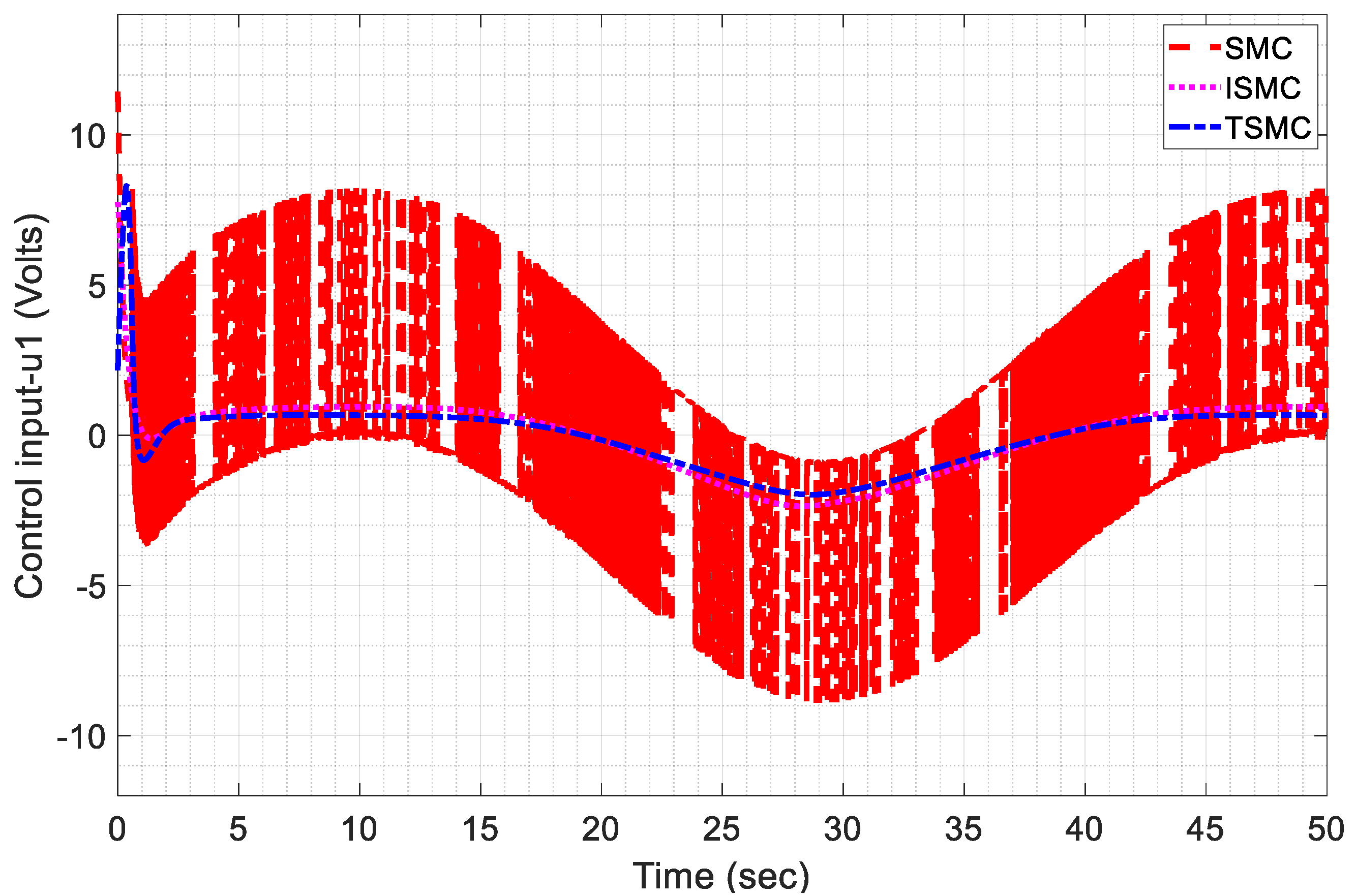
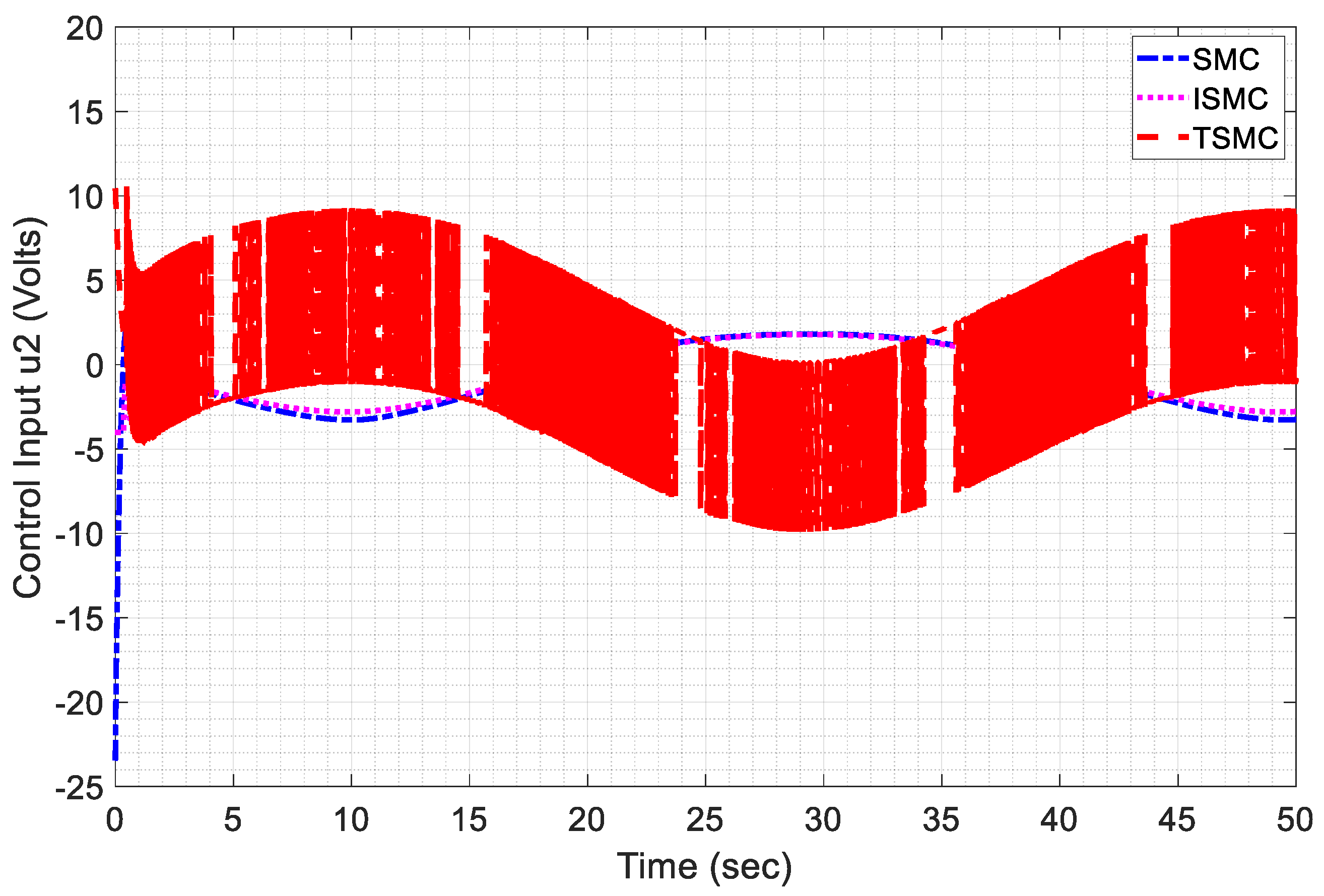
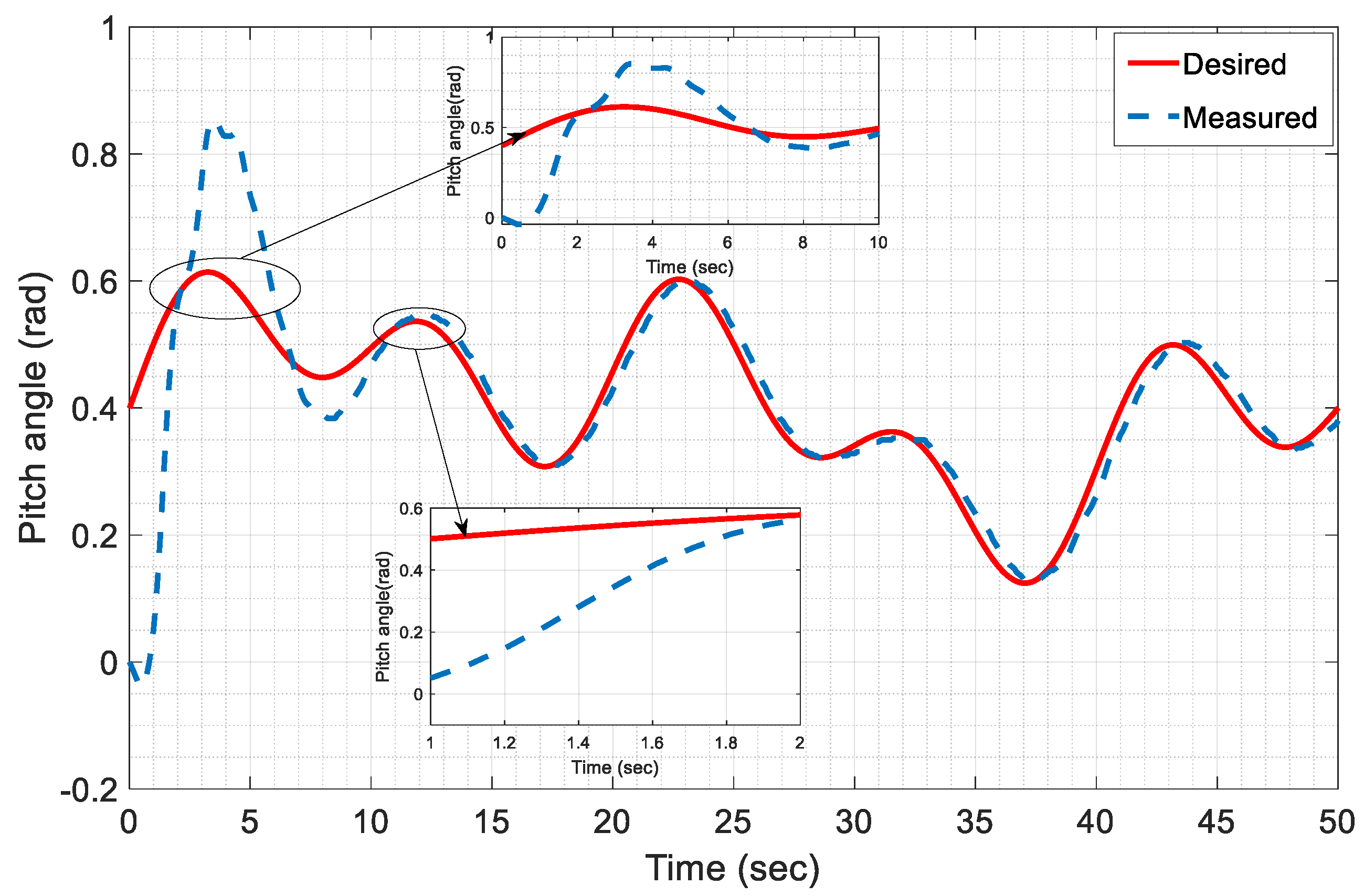
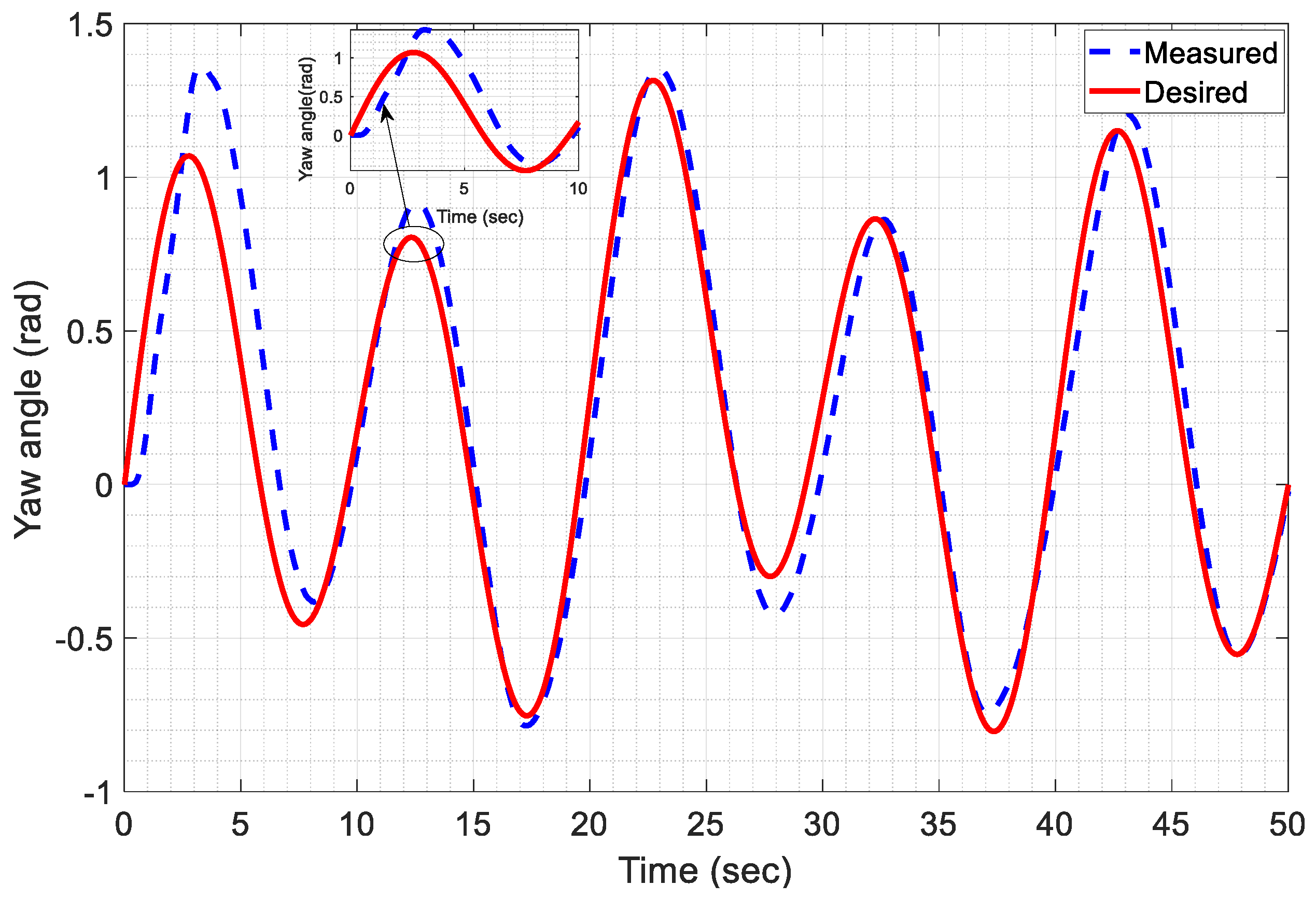
4.2. Case 2: Trajectories Tracking with Sinusoidal Wave
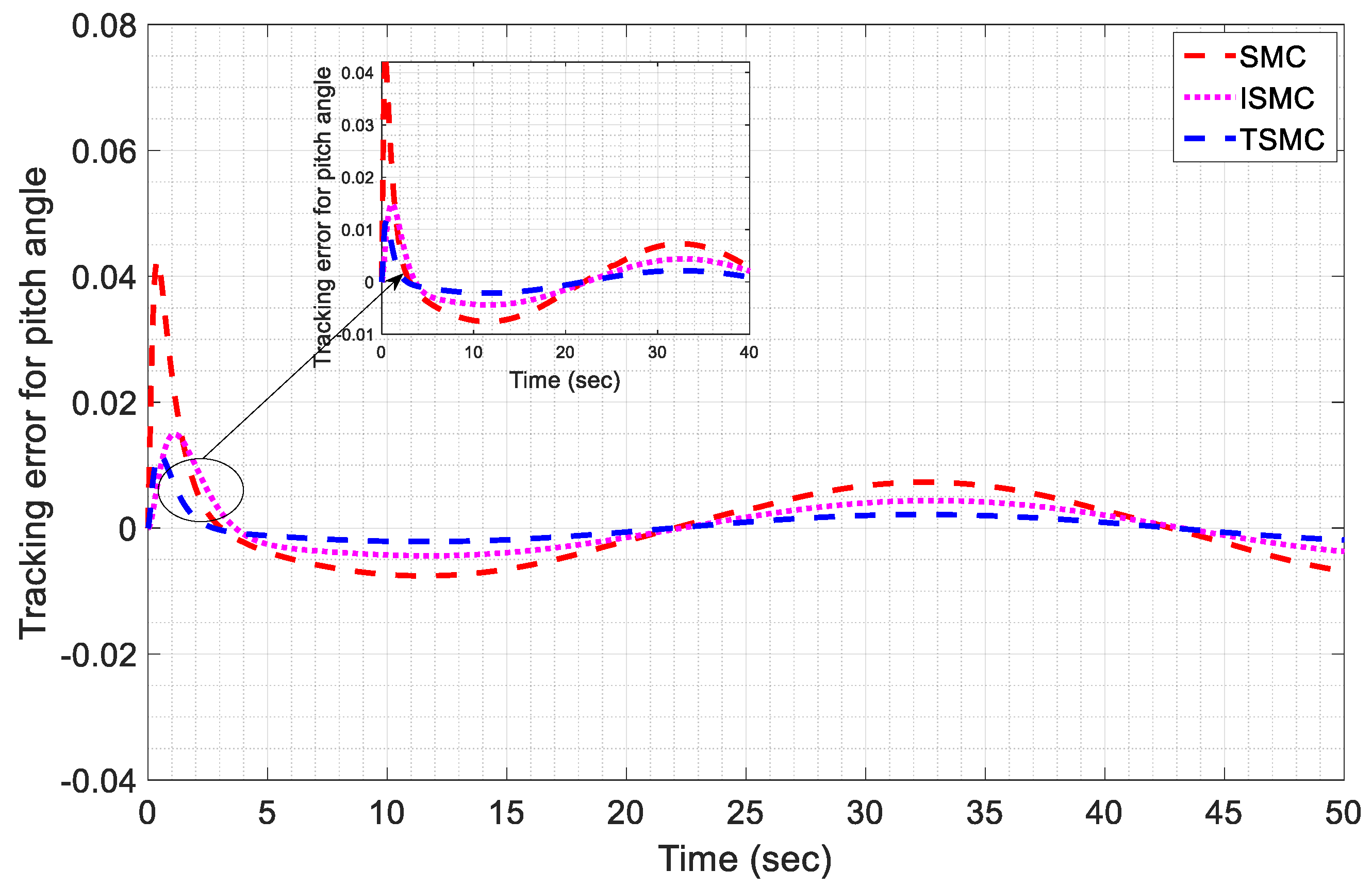
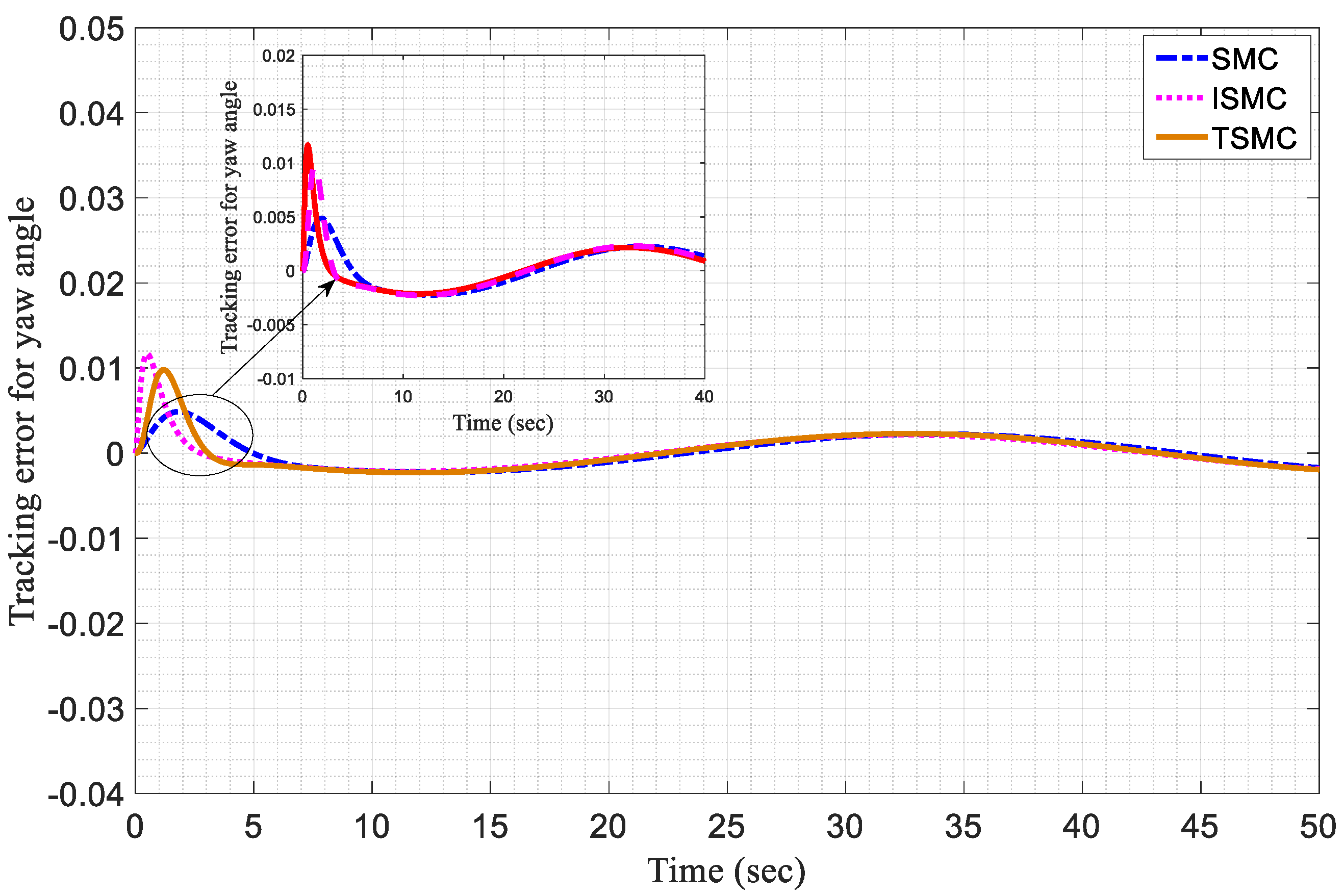
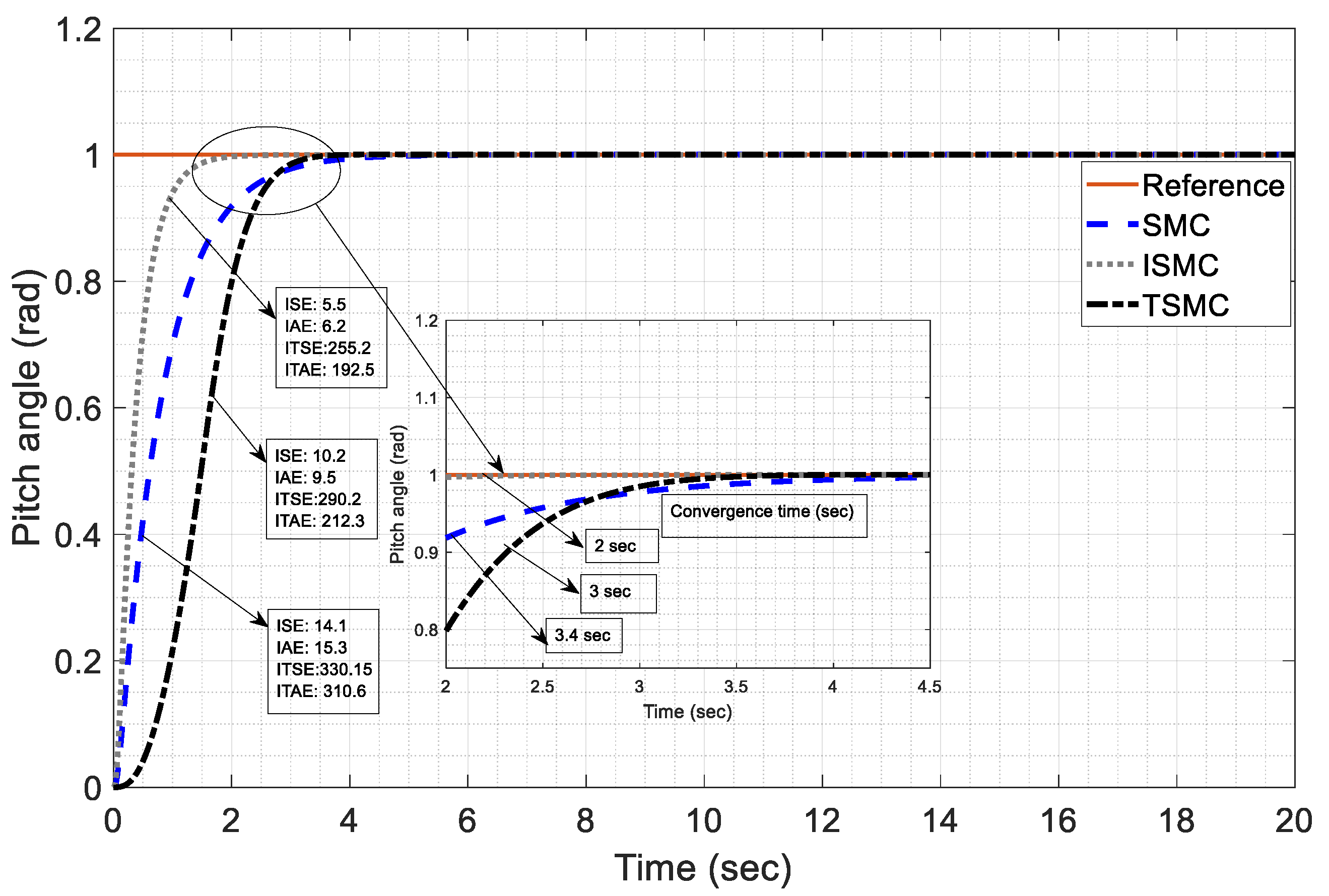
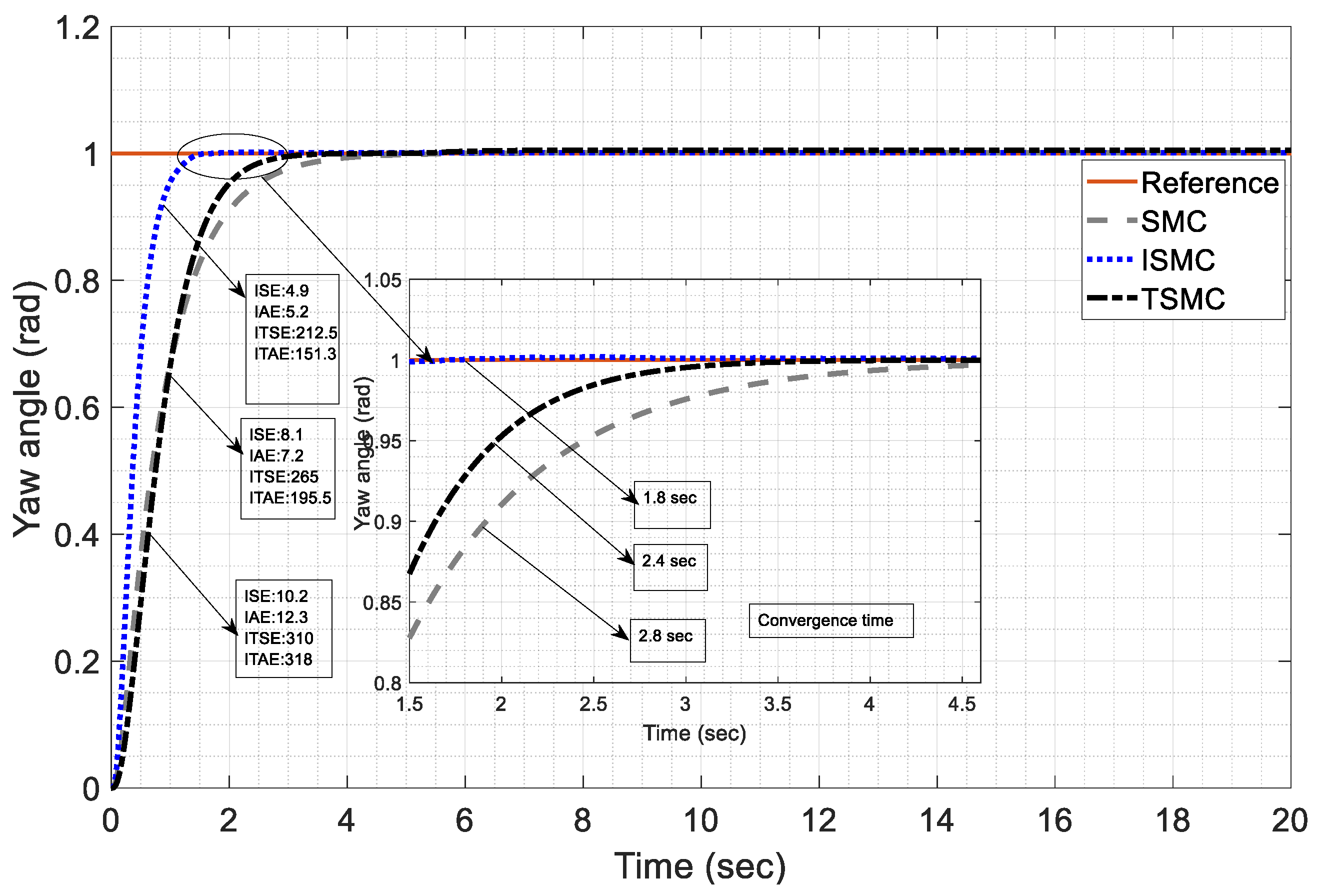
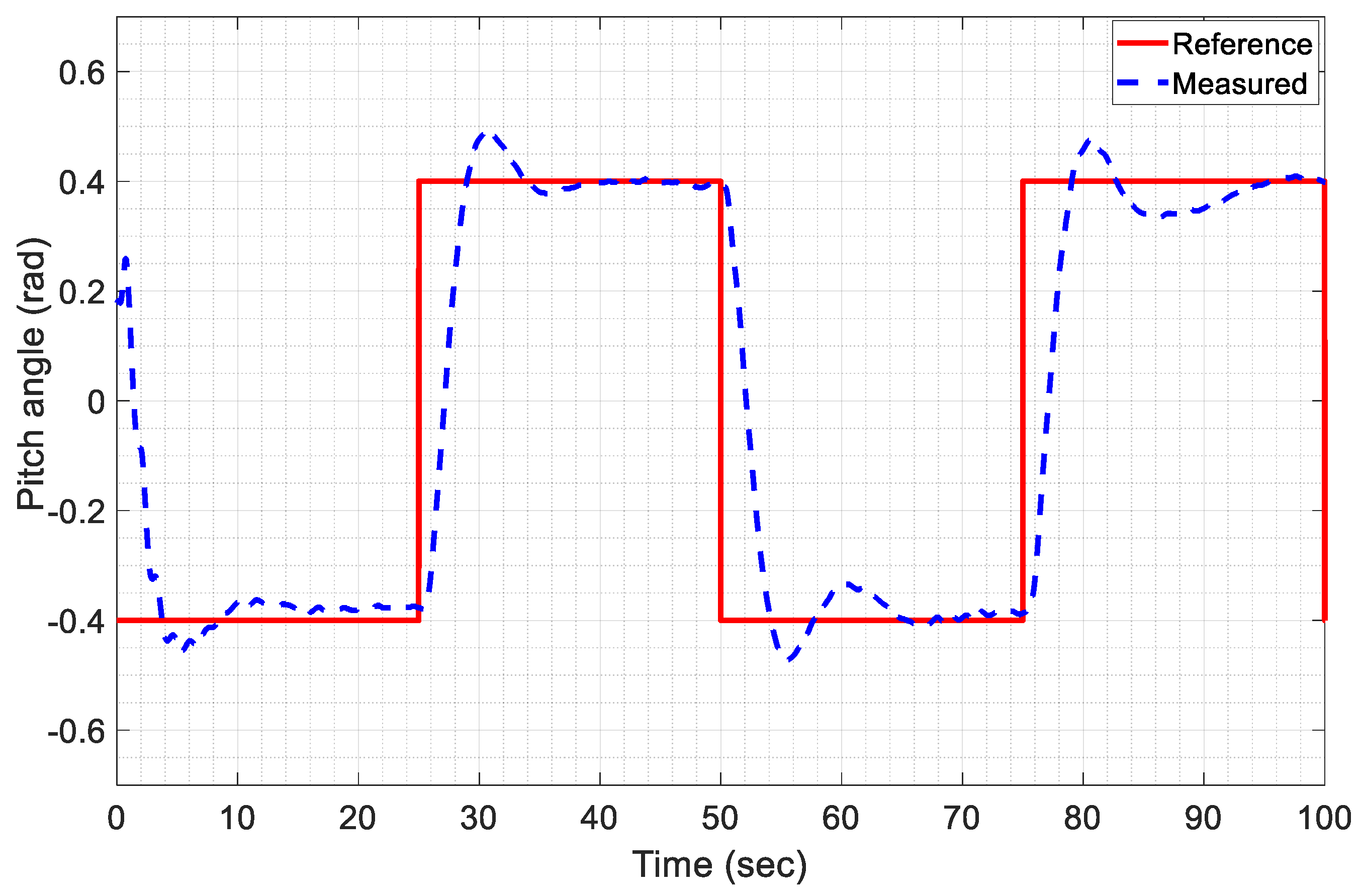
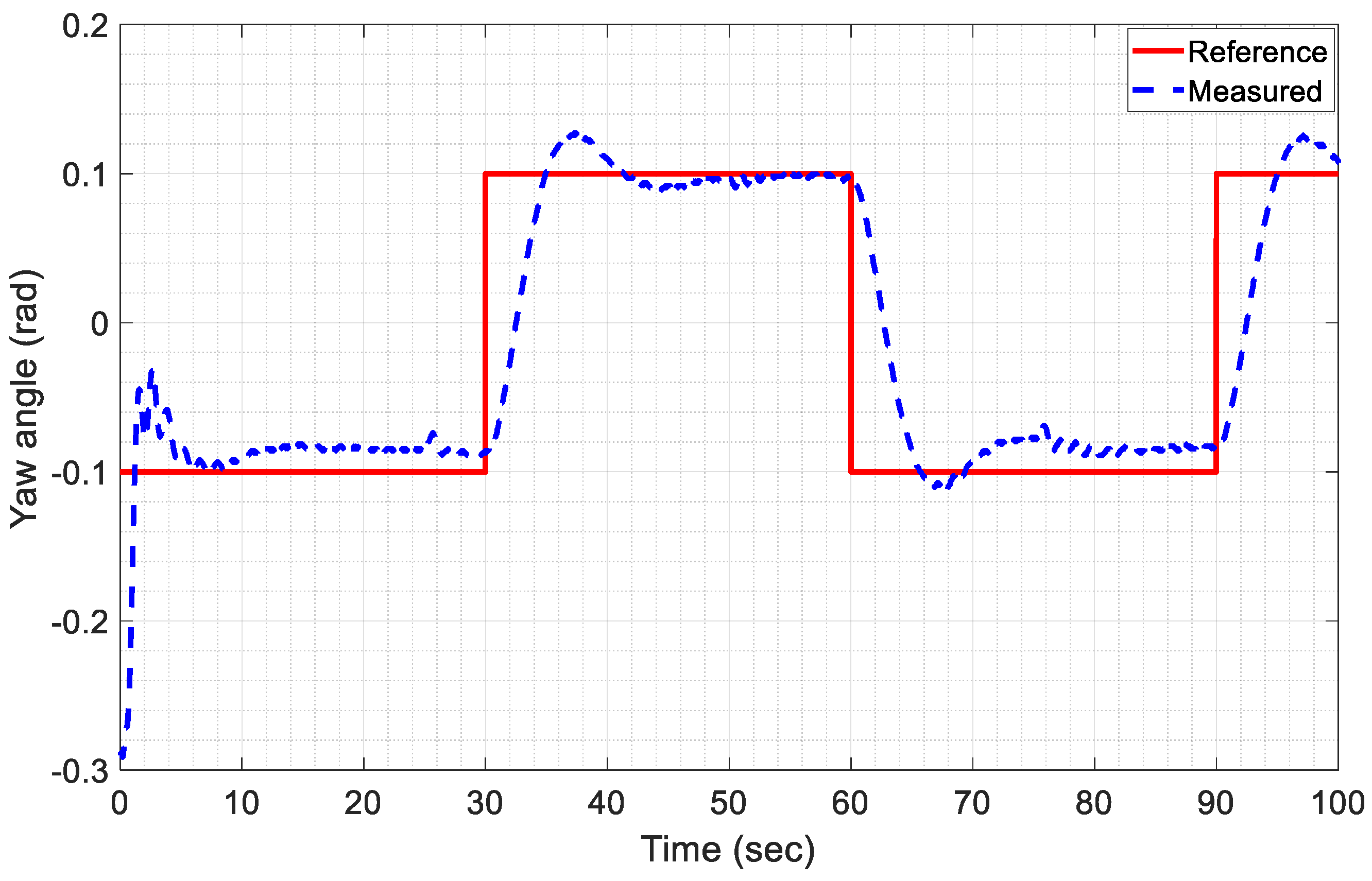
4.3. Case 3: Trajectories Tracking with Reference Step Input
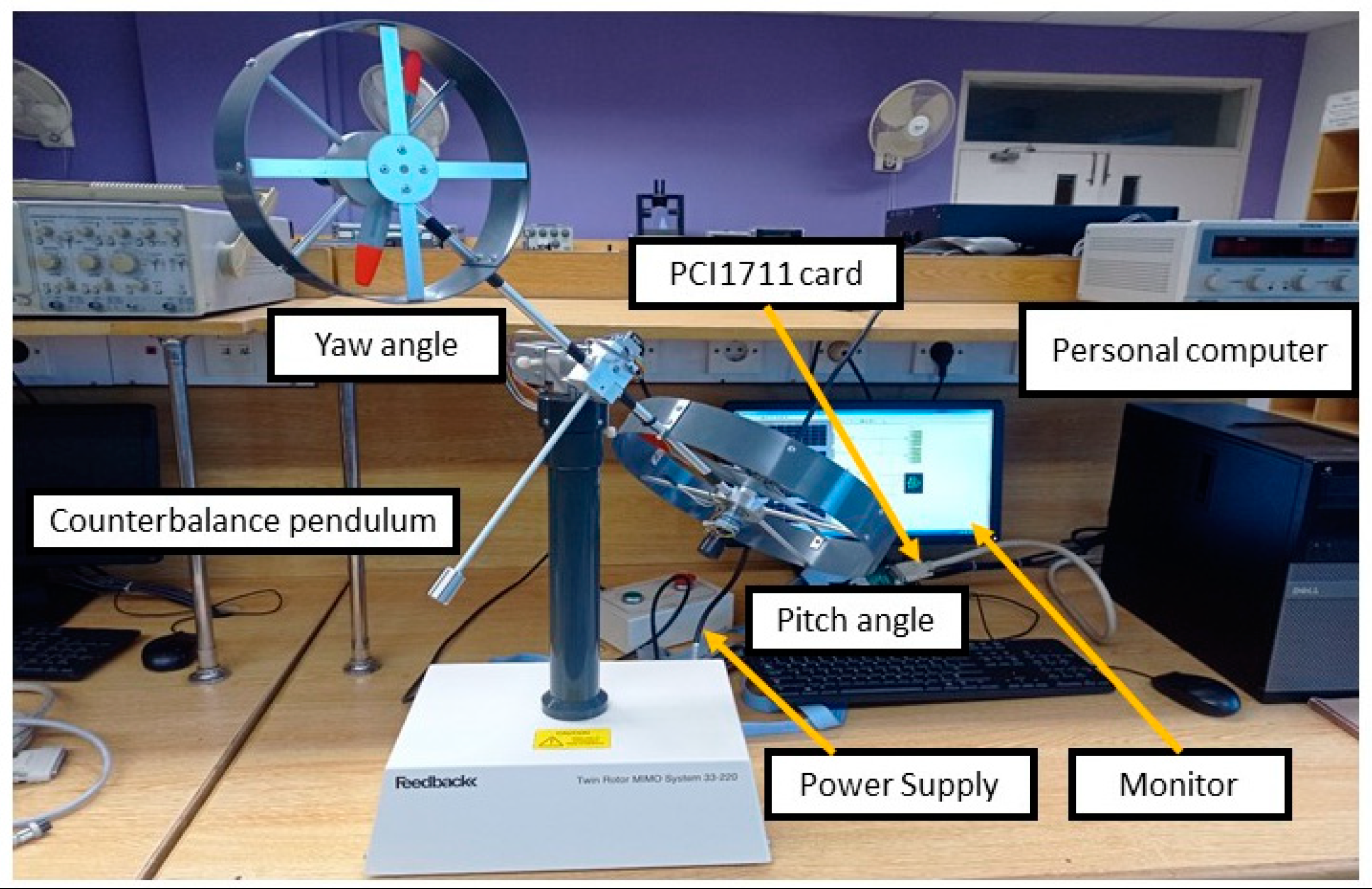
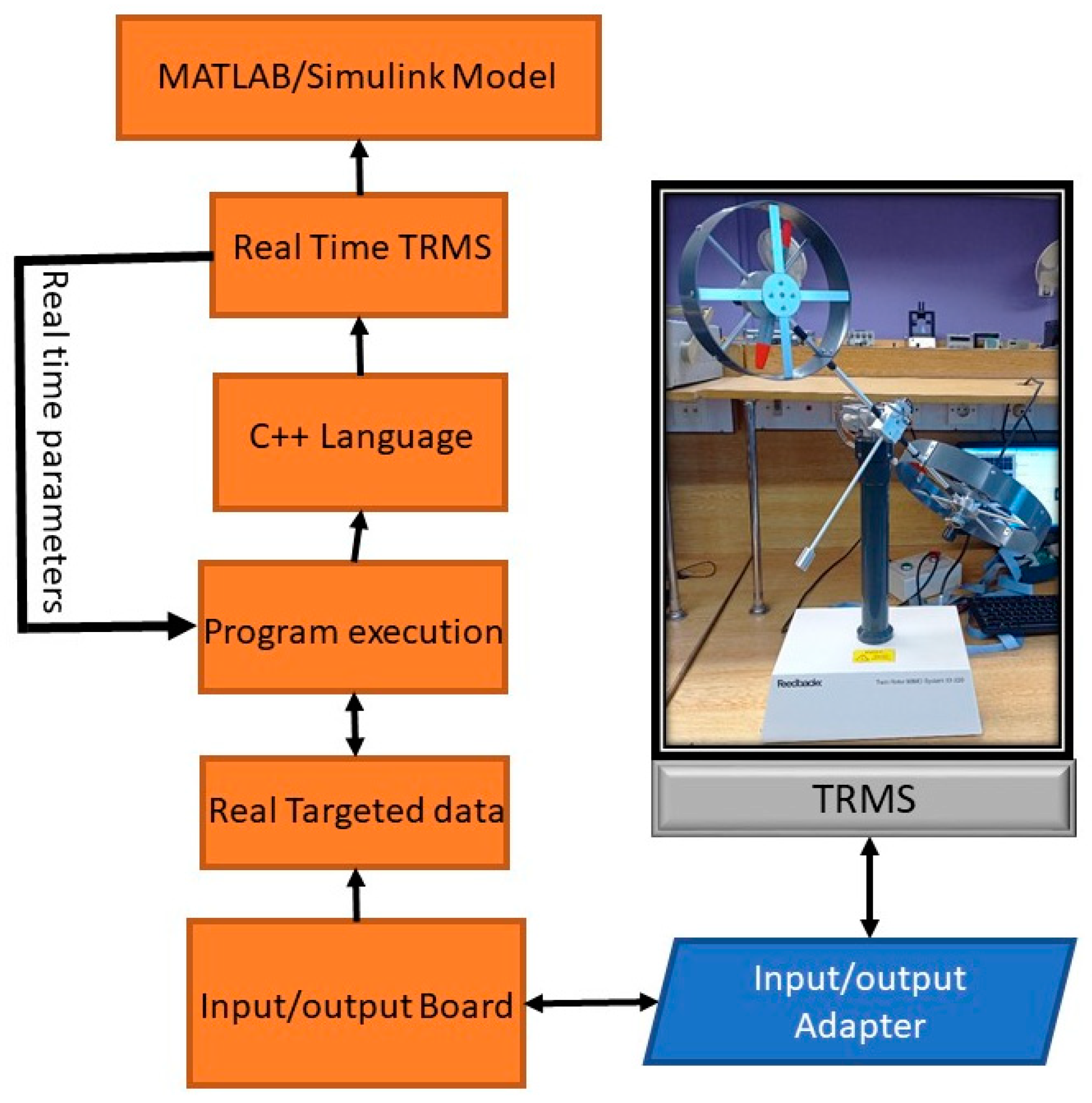
4.4. Experimental Results
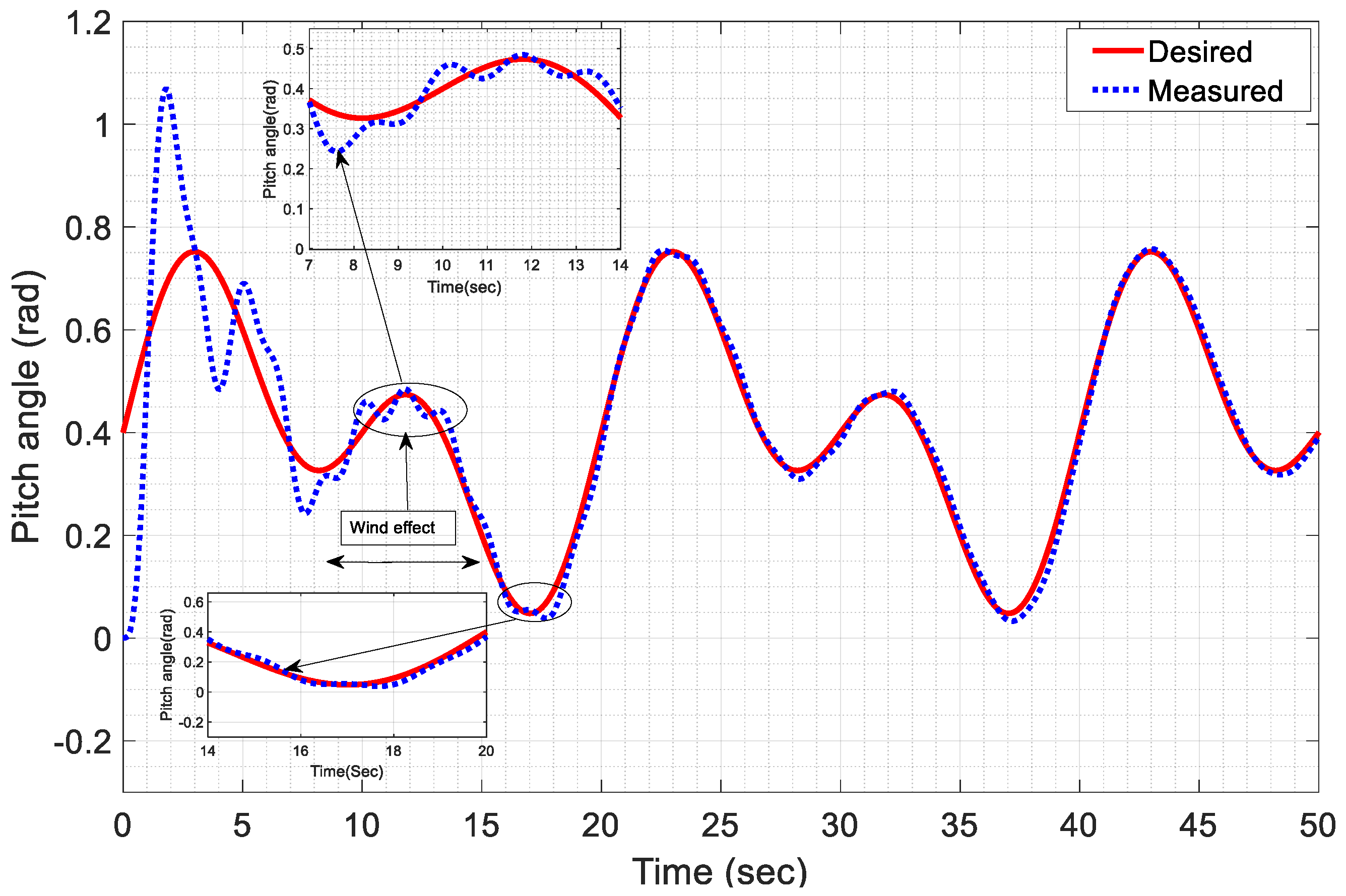
4.4.1. Real-Time Implementation with Input Sinusoidal Wave Trajectory Tracking in the Presence of Wind Effect for ISMC Law
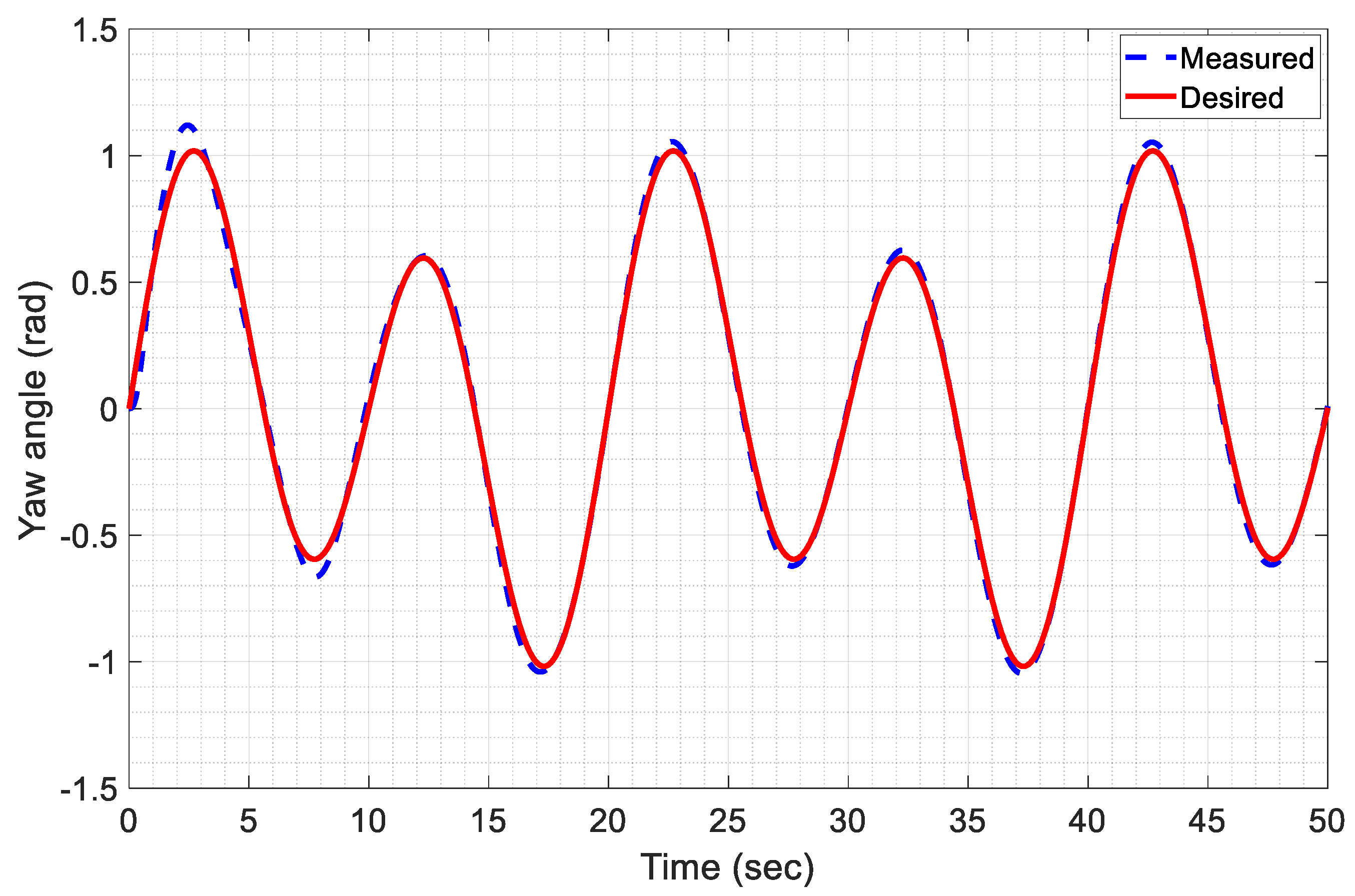
4.4.2. Input Sinusoidal Wave Trajectories Tracking for TSMC Law
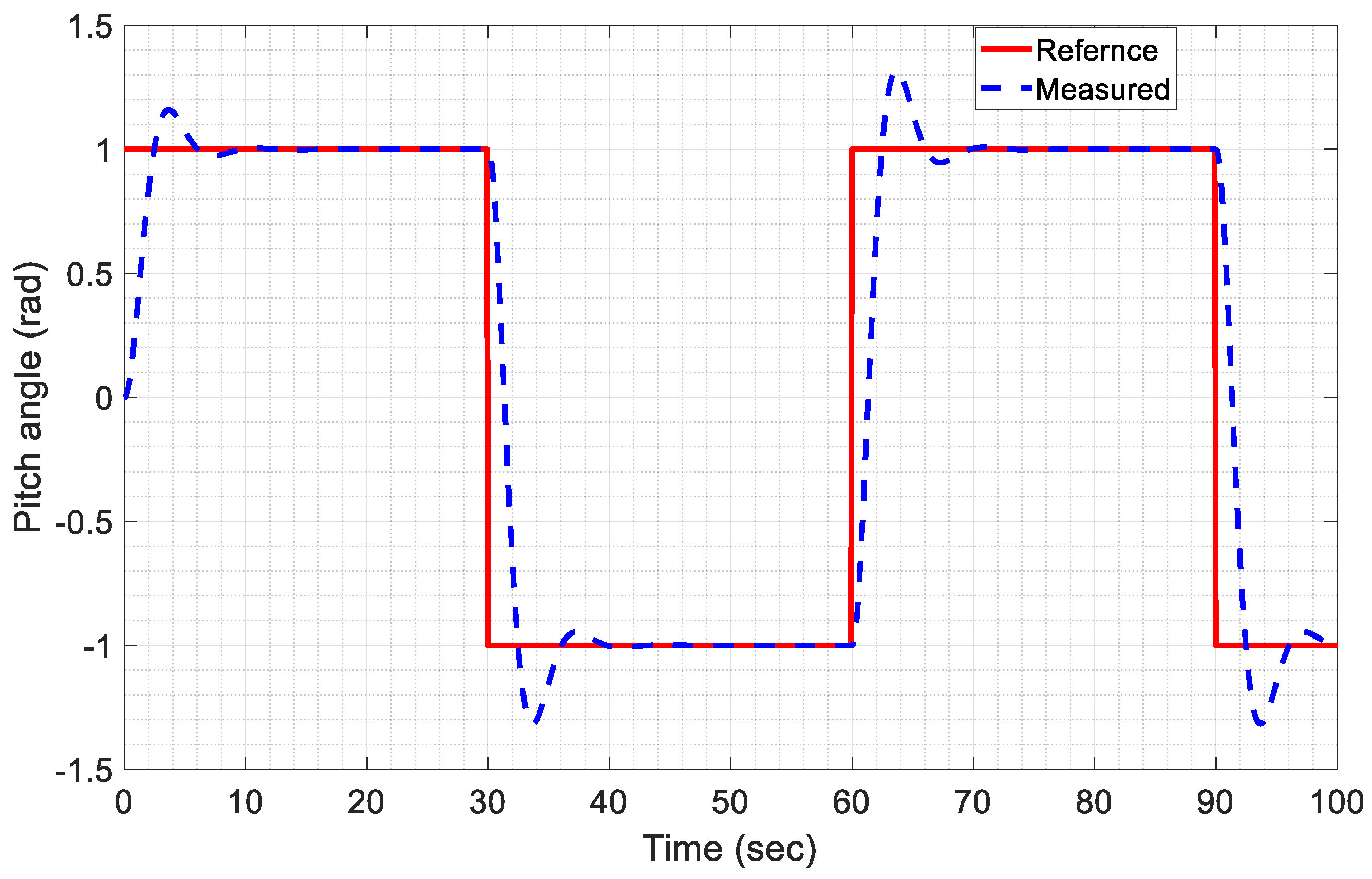
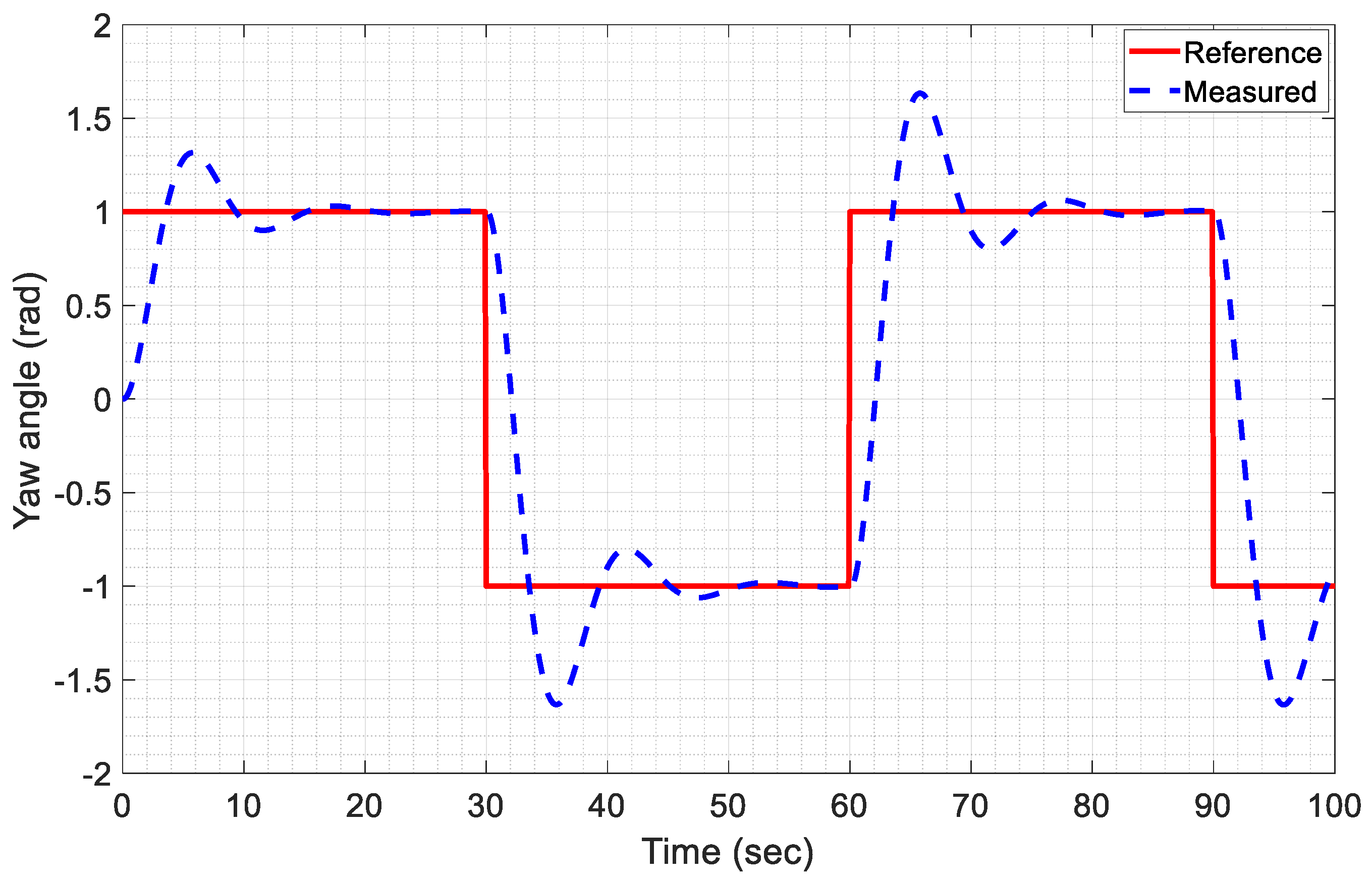
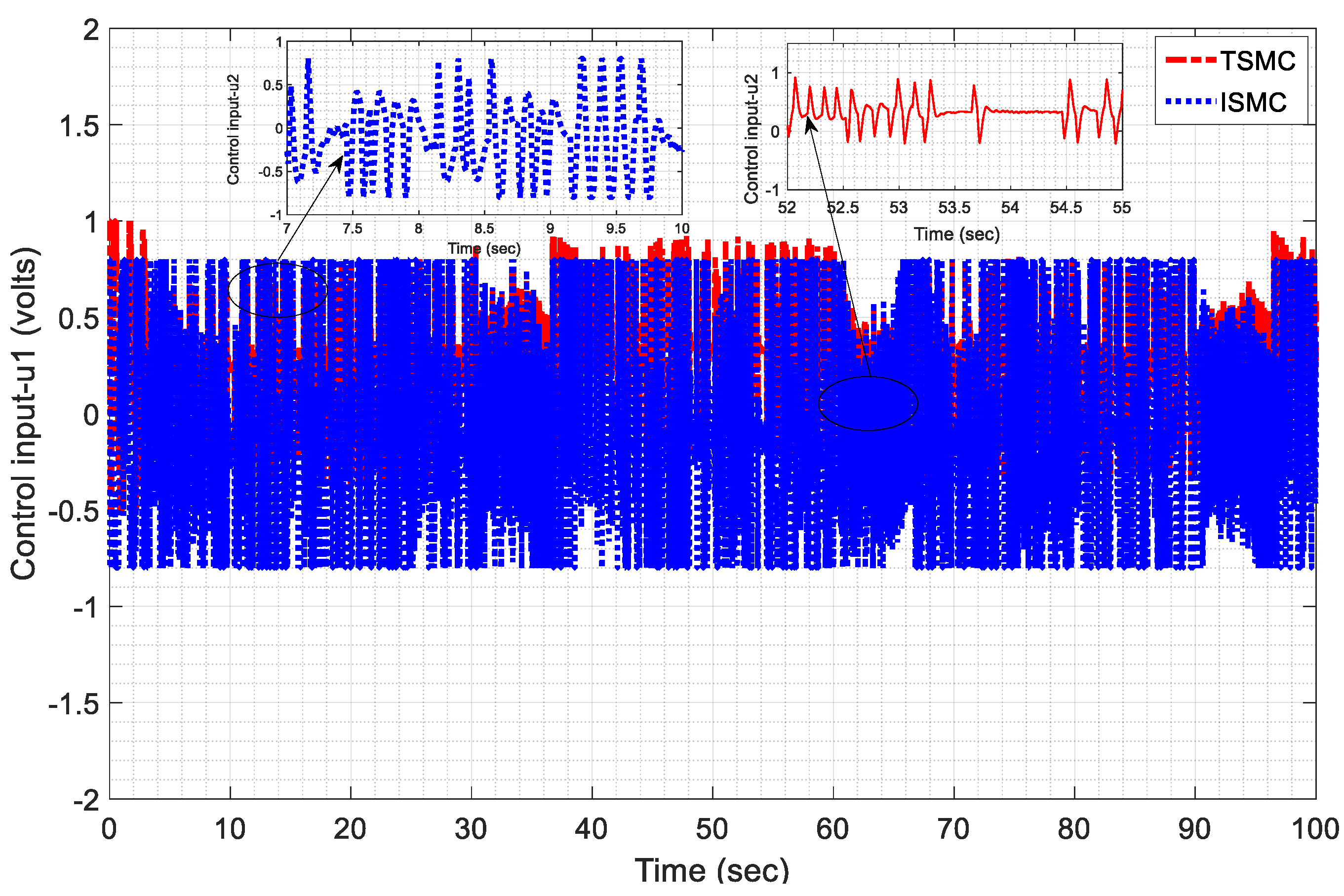
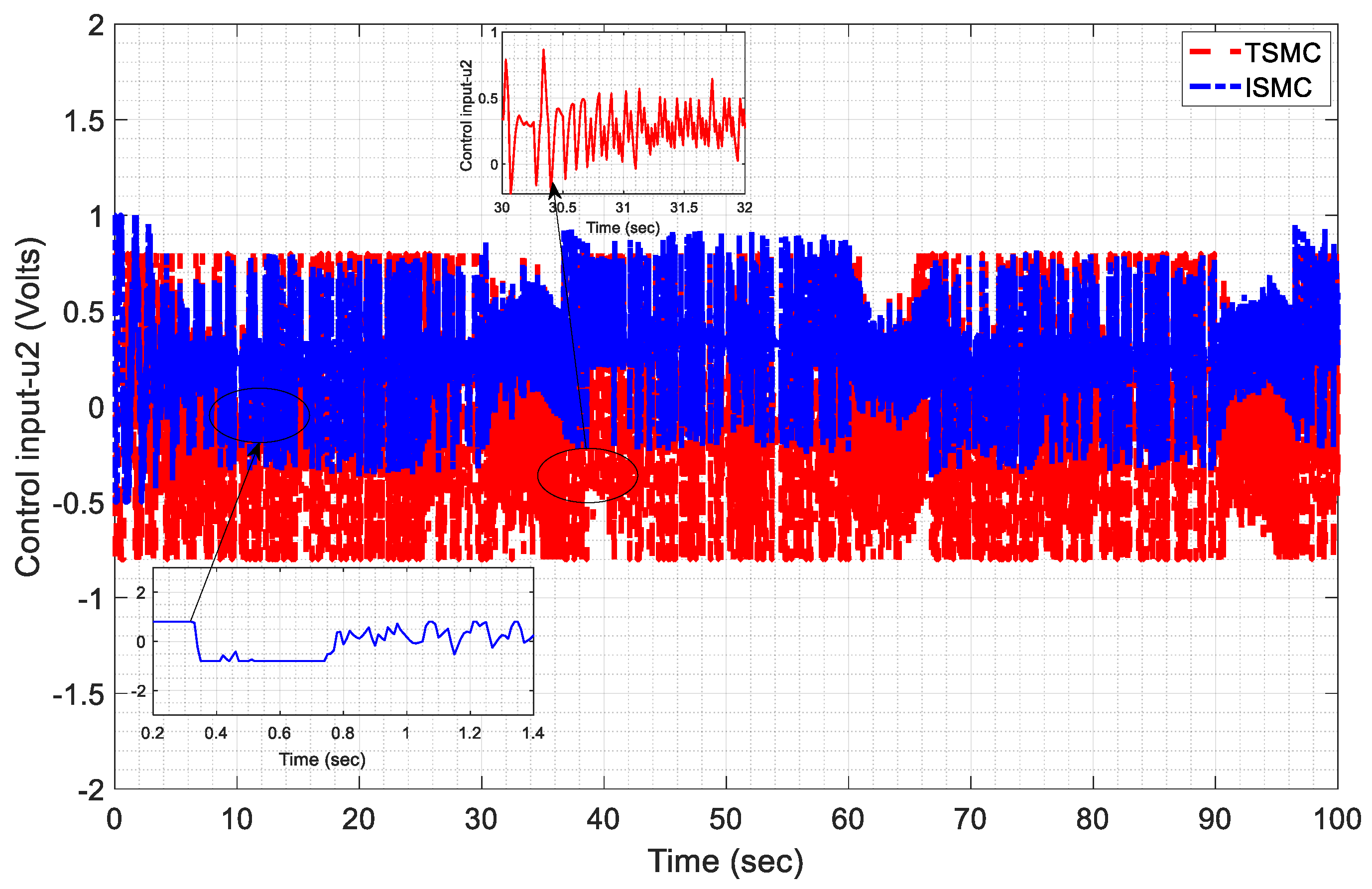
4.4.3. Real-Time Implementation of TSMC and ISMC Laws against the Square Wave
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guo, Z.; Yan, S.; Xu, X.; Chen, Z.; Ren, Z. Twin-model based on model order reduction for rotating motors. IEEE Trans. Magn. 2022, 58, 1–4. [Google Scholar] [CrossRef]
- Haruna, A.; Mohamed, Z.; Abdullahi, A.M.; Basri, M.A.M. A Review of Control Algorithms for Twin Rotor Systems. Appl. Model. Simul. 2023, 7, 93–99. [Google Scholar]
- Sivadasan, J.; Shiney, J.R.J. Modified nondominated sorting genetic algorithm-based multiobjective optimization of a cross-coupled nonlinear PID controller for a Twin Rotor System. J. Eng. Appl. Sci. 2023, 70, 133. [Google Scholar] [CrossRef]
- Palepogu, K.R.; Mahapatra, S. Design of sliding mode control with state varying gains for a Benchmark Twin Rotor MIMO System in Horizontal Motion. Eur. J. Control 2024, 75, 100909. [Google Scholar] [CrossRef]
- Srinivasarao, G.; Samantaray, A.K.; Ghoshal, S.K. Cascaded adaptive integral backstepping sliding mode and super-twisting controller for twin rotor system using bond graph model. ISA Trans. 2022, 130, 516–532. [Google Scholar] [CrossRef]
- Abbas, N.; Pan, X.; Raheem, A.; Shakoor, R.; Arfeen, Z.A.; Rashid, M.; Umer, F.; Safdar, N.; Liu, X. Real-time robust generalized dynamic inversion based optimization control for coupled twin rotor MIMO system. Sci. Rep. 2022, 12, 17852. [Google Scholar] [CrossRef]
- Charfeddine, S.; Alharbi, H.; Jerbi, H.; Kchaou, M.; Abbassi, R.; Leiva, V. A stochastic optimization algorithm to enhance controllers of photovoltaic systems. Mathematics 2022, 10, 2128. [Google Scholar] [CrossRef]
- Mohammadzahri, M.; Khaleghifar, A.; Ghodsi, M.; Soltani, P.; AlSulti, S. A discrete approach to feedback linearization, yaw control of an unmanned helicopter. Unmanned Syst. 2023, 11, 57–66. [Google Scholar] [CrossRef]
- Abbas, N.; Liu, X.; Iqbal, J. Robust GDI-based adaptive recursive sliding mode control (RGDI-ARSMC) for a highly nonlinear MIMO system with varying dynamics of UAV. J. Mech. Sci. Technol. 2024, 38, 2015–2028. [Google Scholar] [CrossRef]
- Rashad, R.; El-Badawy, A.; Aboudonia, A. Sliding mode disturbance observer-based control of a twin rotor MIMO system. ISA Trans. 2017, 69, 166–174. [Google Scholar] [CrossRef]
- Abbas, N.; Liu, X.; Iqbal, J. A flexible mixed-optimization with H∞ control for coupled twin rotor MIMO system based on the method of inequality (MOI)-An experimental study. PLoS ONE 2024, 19, e0300305. [Google Scholar] [CrossRef] [PubMed]
- Isidori, A.; Astolfi, A. Disturbance attenuation and H/sub infinity/-control via measurement feedback in nonlinear systems. IEEE Trans. Autom. Control 1992, 37, 1283–1293. [Google Scholar] [CrossRef]
- Pakro, F.; Nikkhah, A.A. A fuzzy adaptive controller design for integrated guidance and control of a nonlinear model helicopter. Int. J. Dyn. Control 2023, 11, 701–716. [Google Scholar] [CrossRef]
- Singh, V.K.; Kamal, S.; Ghosh, S. Prescribed-time constrained feedback control for an uncertain twin rotor helicopter. Aerosp. Sci. Technol. 2023, 140, 108483. [Google Scholar] [CrossRef]
- Dutta, L.; Kumar Das, D. Nonlinear disturbance observer-based adaptive feedback linearized model predictive controller design for a class of nonlinear systems. Asian J. Control 2022, 24, 2505–2518. [Google Scholar] [CrossRef]
- Zheng, E.; Xiong, J. Quad-rotor unmanned helicopter control via novel robust terminal sliding mode controller and under-actuated system sliding mode controller. Optik 2014, 125, 2817–2825. [Google Scholar] [CrossRef]
- Jiang, T.; Lin, D.; Song, T. Novel integral sliding mode control for small-scale unmanned helicopters. J. Frankl. Inst. 2019, 356, 2668–2689. [Google Scholar] [CrossRef]
- Nonaka, K.; Sugizaki, H. Integral sliding mode altitude control for a small model helicopter with ground effect compensation. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 202–207. [Google Scholar]
- Butt, S.S.; Aschemann, H. Multi-variable integral sliding mode control of a two degrees of freedom helicopter. IFAC-PapersOnLine 2015, 48, 802–807. [Google Scholar] [CrossRef]
- Fang, X.; Liu, F. High-order mismatched disturbance rejection control for small-scale unmanned helicopter via continuous nonsingular terminal sliding-mode approach. Int. J. Robust Nonlinear Control 2019, 29, 935–948. [Google Scholar] [CrossRef]
- Fessi, R.; Bouallègue, S.; Haggège, J.; Vaidyanathan, S. Terminal sliding mode controller design for a quadrotor unmanned aerial vehicle. In Applications of Sliding Mode Control in Science and Engineering; Springer: Cham, Switzerland, 2017; pp. 81–98. [Google Scholar]
- Krener, A.J.; Isidori, A. Linearization by output injection and nonlinear observers. Syst. Control Lett. 1983, 3, 47–52. [Google Scholar] [CrossRef]
- Viana, K.; Larrea, M.; Irigoyen, E.; Diez, M.; Zubizarreta, A. MIMO neural models for a twin-rotor platform: Comparison between mathematical simulations and real experiments. In Proceedings of the 15th International Conference on Soft Computing Models in Industrial and Environmental Applications (SOCO 2020), Burgos, Spain, 16–18 September 2020; pp. 407–417. [Google Scholar]
- Martinez-Armero, Y.; Renteria-Mena, J.B.; Giraldo, E. Robust Embedded Control applied to a Twin Rotor MIMO System. Eng. Lett. 2023, 31, 230–238. [Google Scholar]
- Irfan, S.; Mehmood, A.; Razzaq, M.T.; Iqbal, J. Advanced sliding mode control techniques for inverted pendulum: Modelling and simulation. Eng. Sci. Technol. Int. J. 2018, 21, 753–759. [Google Scholar] [CrossRef]
- Jia, Z.; Yu, J.; Mei, Y.; Chen, Y.; Shen, Y.; Ai, X. Integral backstepping sliding mode control for quadrotor helicopter under external uncertain disturbances. Aerosp. Sci. Technol. 2017, 68, 299–307. [Google Scholar] [CrossRef]
- Hou, Z.; Yu, X.; Lu, P. Terminal sliding mode control for quadrotors with chattering reduction and disturbances estimator: Theory and application. J. Intell. Robot. Syst. 2022, 105, 71. [Google Scholar] [CrossRef]
- Palepogu, K.R.; Mahapatra, S. Synchronous Pitch and Yaw Orientation Control of a Twin Rotor MIMO System Using State Varying Gain Sliding Mode Control. Arab. J. Sci. Eng. 2024, 1–14. [Google Scholar] [CrossRef]
- Rezoug, A.; Messah, A.; Messaoud, W.A.; Baizid, K.; Iqbal, J. Adaptive-optimal MIMO nonsingular terminal sliding mode control of twin-rotor helicopter system: Meta-heuristics and super-twisting based control approach. J. Braz. Soc. Mech. Sci. Eng. 2024, 46, 162. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronyms | Definition |
|---|---|
| MIMO | Multiple Input Multiple Output |
| TRMS | Twin Rotor MIMO System |
| SMC | Sliding Mode Control |
| HOSMC | Higher Order Sliding Mode Control |
| DC | Direct Current |
| TSMC | Terminal Sliding Mode Control |
| UAV | Unmanned Aerial Vehicle |
| SISO | Single Input Single Output |
| RGIB | Robust Generalized Inversion-Based |
| PID | Proportional Integral Derivative |
| LQR | Linear Quadratic Regulator |
| DOF | Degree Of Freedom |
| GA | Genetic Algorithm |
| VG | Variable Gain |
| Parameters | Definition | Value | Unit |
|---|---|---|---|
| Moment of inertia for vertical rotor | 6.7 × | ||
| Moment of inertia for horizontal rotor | 2.1 × | ||
| Static characteristics parameter | 0.0 | - | |
| Static characteristics parameter | 0.03 | - | |
| Static characteristics parameter | 0.09 | - | |
| Static characteristics parameter | 0.092 | - | |
| Gyroscopic momentum | 0.5 | ||
| Frictional momentum | 6 × | ||
| Frictional momentum | 1 × | ||
| Frictional momentum | 1 × | ||
| Frictional momentum | 1 × | ||
| Gyroscopic momentum | 0.04 | ||
| , | Motor 1 and motor 2 gains | 1.1, 2 | - |
| Motor 1 and Motor 2 denominator parameters | 2, 1, 1.5, 1 | - | |
| Cross reaction momentum parameters | 2, 3, −0.5 | - |
| Parameters | SMC | ISMC | TSMC | URED/Observer |
|---|---|---|---|---|
| 5, 11 | - | - | - | |
| 3.3, 7 | 4.8, 4 | 10, 15 | - | |
| 7, 9 | 2.5, 5 | 5, 9 | - | |
| 1.1, 3 | 1.5, 3 | 6, 8 | - | |
| - | 5, 7 | - | - | |
| - | 7, 9 | 3, 3.9 | - | |
| - | 1, 1.5 | - | - | |
| - | 0.5, 0.3 | - | - | |
| - | 0.6, 0.2 | - | - | |
| - | 7, 3.3 | - | 9.5 | |
| - | - | - | 10.5, 0.0002 | |
| - | 3.5, 8 | - | 9.5 |
| Without Disturbance | With Disturbance | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Control Techniques | Euler’s Angles | Settling Time (s) | Rise Time (s) | Overshoot (%) | Steady-State Error () | Settling Time (s) | Rise Time (s) | Overshoot (%) | Steady-State Error () |
| SMC | Pitch | 4.5 | 4 | 0.15 | 0.005 | 7 | 6 | 0.1 | 0.002 |
| Yaw | 3.2 | 1 | 0.1 | 0 | 6 | 6.5 | 0.12 | 0.009 | |
| ISMC | Pitch | 2.3 | 0.6 | 0.08 | 0 | 3.1 | 1 | 0.08 | 0 |
| Yaw | 2.9 | 0.4 | 0.01 | 0 | 3.3 | 1.1 | 0.01 | 0 | |
| TSMC | Pitch | 3.1 | 0.7 | 0.085 | 0 | 3.3 | 1.3 | 0.082 | 0 |
| Yaw | 3.1 | 0.5 | 0.02 | 0 | 3.4 | 1.2 | 0.02 | 0 | |
| For Step Input Signal | |||||
|---|---|---|---|---|---|
| Control Techniques | Euler’s Angles | Settling Time (s) | Control Input (Volt) | Overshoot (%) | Steady-State Error () |
| VGSMC proposed in [25] | Pitch | 5 | 10 | 0 | 0.01 |
| Yaw | 3 | 9 | 0.1 | 0 | |
| O-SMC proposed in [26] | Pitch | 5.2 | 14 | 0.05 | 0.001 |
| Yaw | 4 | 12 | 0.02 | 0.003 | |
| NTSMC proposed in [26] | Pitch | 4 | - | 0.01 | 0 |
| Yaw | 3.5 | - | 0.02 | 0 | |
| The proposed SMC | Pitch | 3.4 | 4.8 | 0 | 0 |
| Yaw | 2.8 | 3.8 | 0 | 0 | |
| The proposed TSMC | Pitch | 3 | - | 0 | 0 |
| Yaw | 2.4 | - | 0 | 0 | |
| Control Algorithms | Euler’s Angles | ISE (rad2/s) | IAE (rad/s) | ITSE (rad2/s2) | ITAE (rad/s) | ||||
|---|---|---|---|---|---|---|---|---|---|
| SMC | Pitch | 180 | 0.66 | 50.55 | 10 × | 160 | 0.0095 | 0.020 | |
| Yaw | 350 | 0.83 | 25.25 | 8.4 × | 80 | 0.0055 | 0.051 | ||
| ISMC | Pitch | 120 | 0.19 | 25.1 | 9 × | 125 | 0.0011 | 0.0015 | |
| Yaw | 225 | 0.80 | 13.55 | 8.1 × | 29 | 0.0012 | 0.0049 | ||
| TSMC | Pitch | 123 | 0.50 | 26.5 | 9 × | 135 | 0.0045 | 0.0060 | |
| Yaw | 285 | 0.75 | 19.65 | 8.2 × | 40 | 0.0017 | 0.0058 |
| Control Algorithms | Euler’s Angles | ISE (rad2/s) | IAE (rad/s) | ITSE (rad2/s2) | ITAE (rad/s) | ||||
|---|---|---|---|---|---|---|---|---|---|
| ISMC | Pitch | 150.5 | 1.13 | 10.5 | 15 | 130 | 0.0019 | 0.75 | |
| Yaw | 95.5 | 3.12 | 20.21 | 9.5 | 155.5 | 0.011 | 0.97 | ||
| TSMC | Pitch | 80.6 | 0.95 | 25.12 | 27 | 180.5 | 0.0092 | 1.31 | |
| Yaw | 110.4 | 4.13 | 35.11 | 20 | 220.5 | 0.099 | 1.85 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Irfan, S.; Zhao, L.; Ullah, S.; Javaid, U.; Iqbal, J. Differentiator- and Observer-Based Feedback Linearized Advanced Nonlinear Control Strategies for an Unmanned Aerial Vehicle System. Drones 2024, 8, 527. https://doi.org/10.3390/drones8100527
Irfan S, Zhao L, Ullah S, Javaid U, Iqbal J. Differentiator- and Observer-Based Feedback Linearized Advanced Nonlinear Control Strategies for an Unmanned Aerial Vehicle System. Drones. 2024; 8(10):527. https://doi.org/10.3390/drones8100527
Chicago/Turabian StyleIrfan, Saqib, Liangyu Zhao, Safeer Ullah, Usman Javaid, and Jamshed Iqbal. 2024. "Differentiator- and Observer-Based Feedback Linearized Advanced Nonlinear Control Strategies for an Unmanned Aerial Vehicle System" Drones 8, no. 10: 527. https://doi.org/10.3390/drones8100527