Multi-Objective Optimization Design of Porous Gas Journal Bearing Considering the Fluid–Structure Interaction Effect

 , ,
, ,
Abstract
:1. Introduction
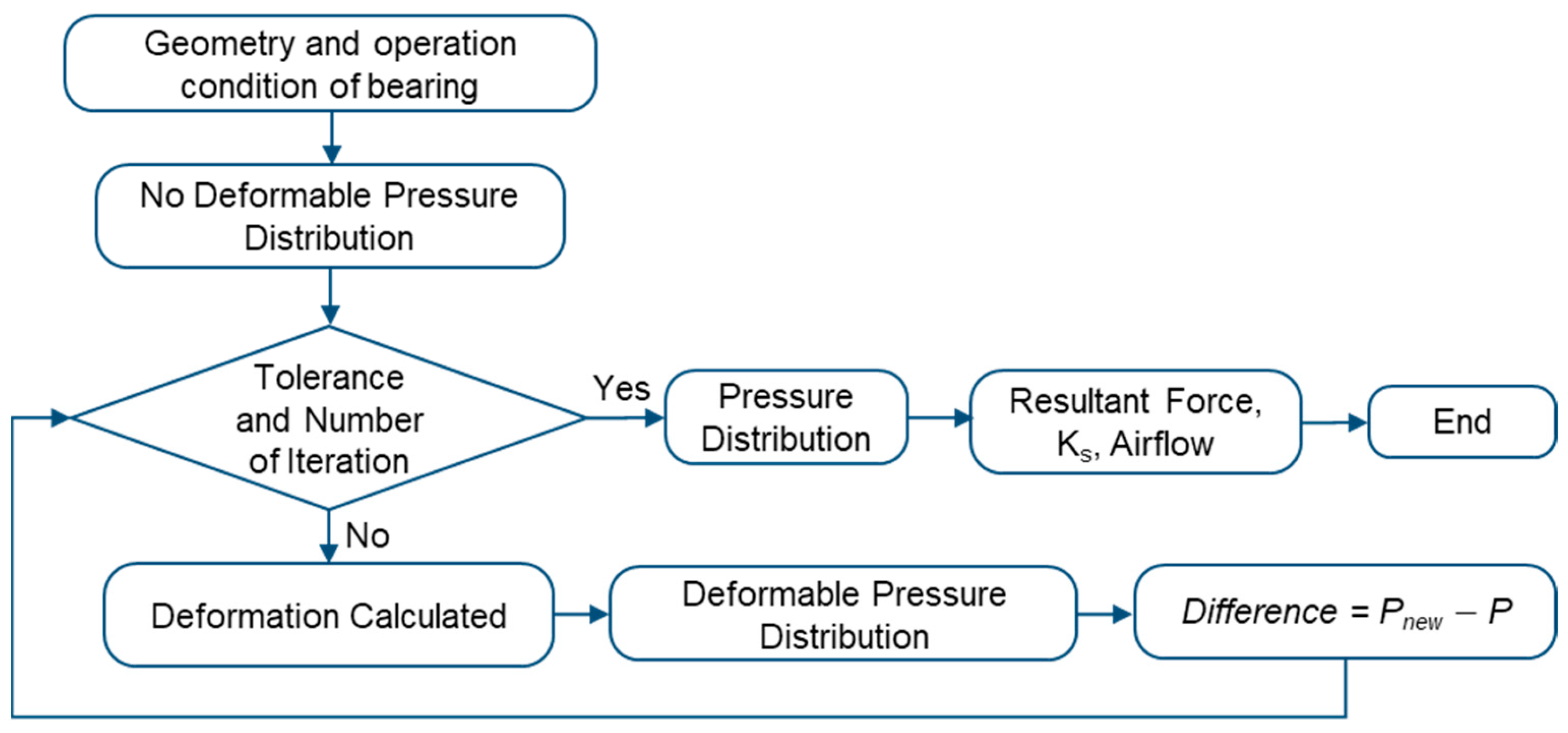
2. Flow Structure Interaction (FSI) Modeling Method
2.1. Porous Gas Journal Bearing Theory
2.1.1. Porous Gas Journal Bearing Numerical Solution
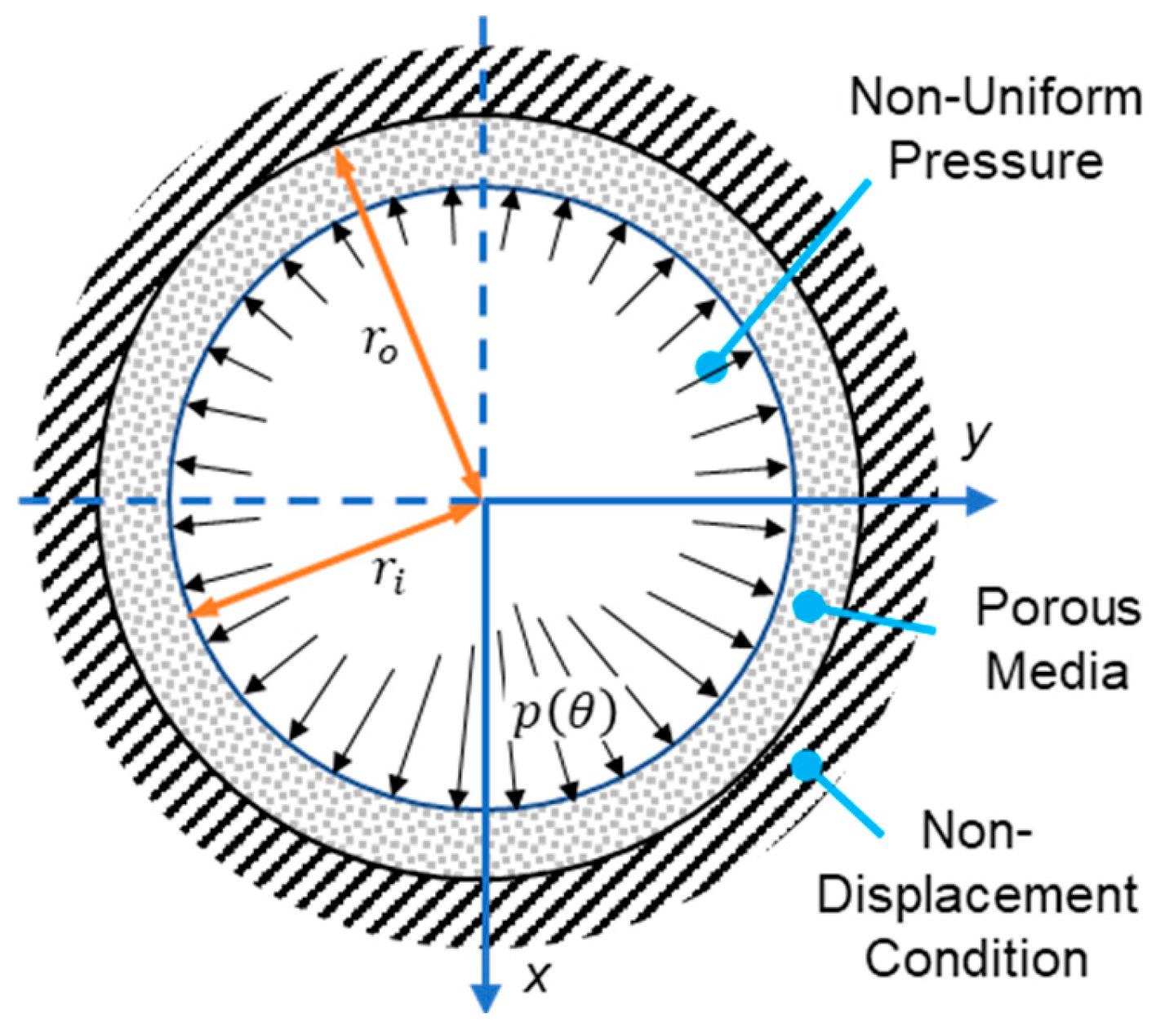
2.1.2. Porous Media Deformation Theory
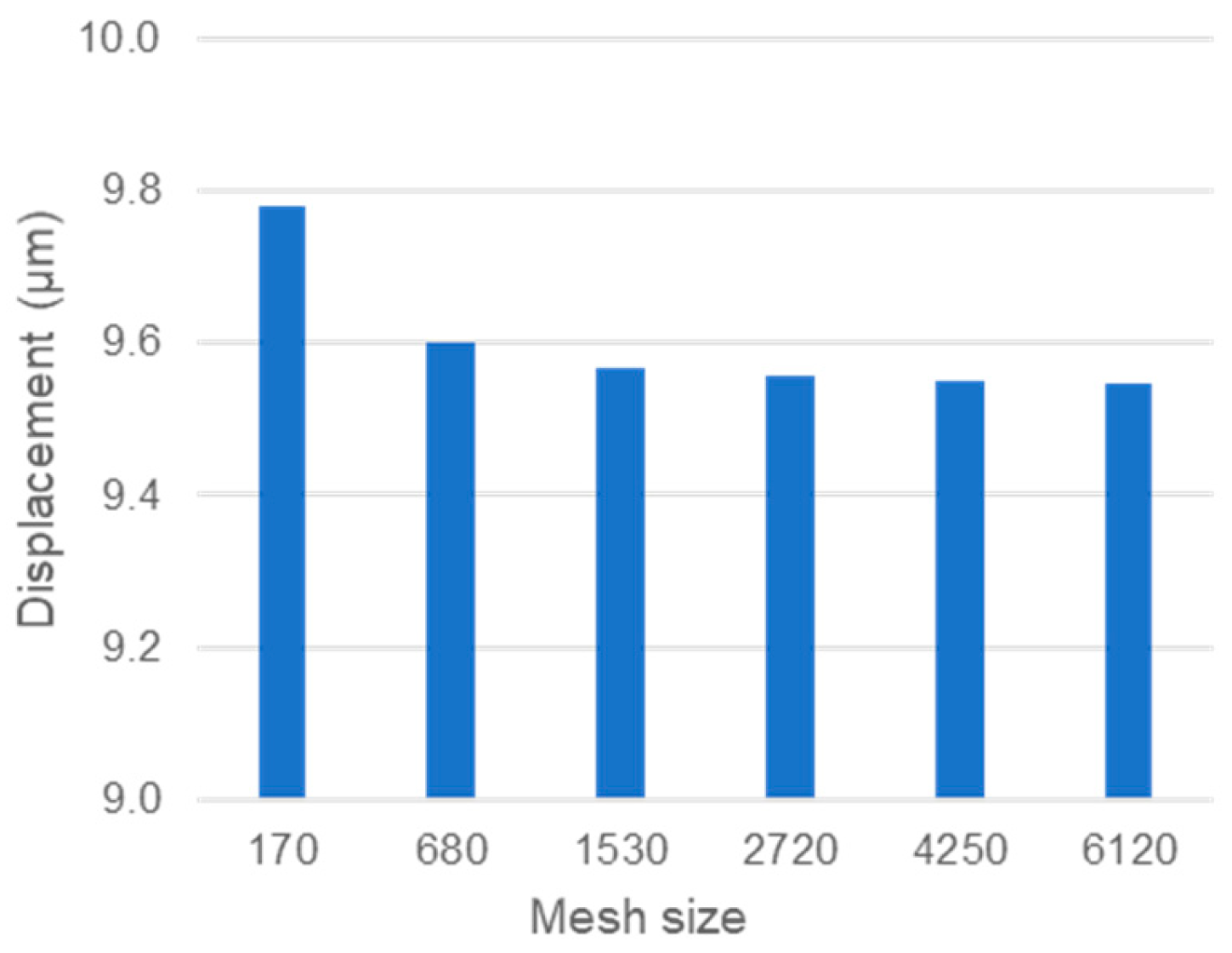
2.2. Analysis of the Algorithm Performance
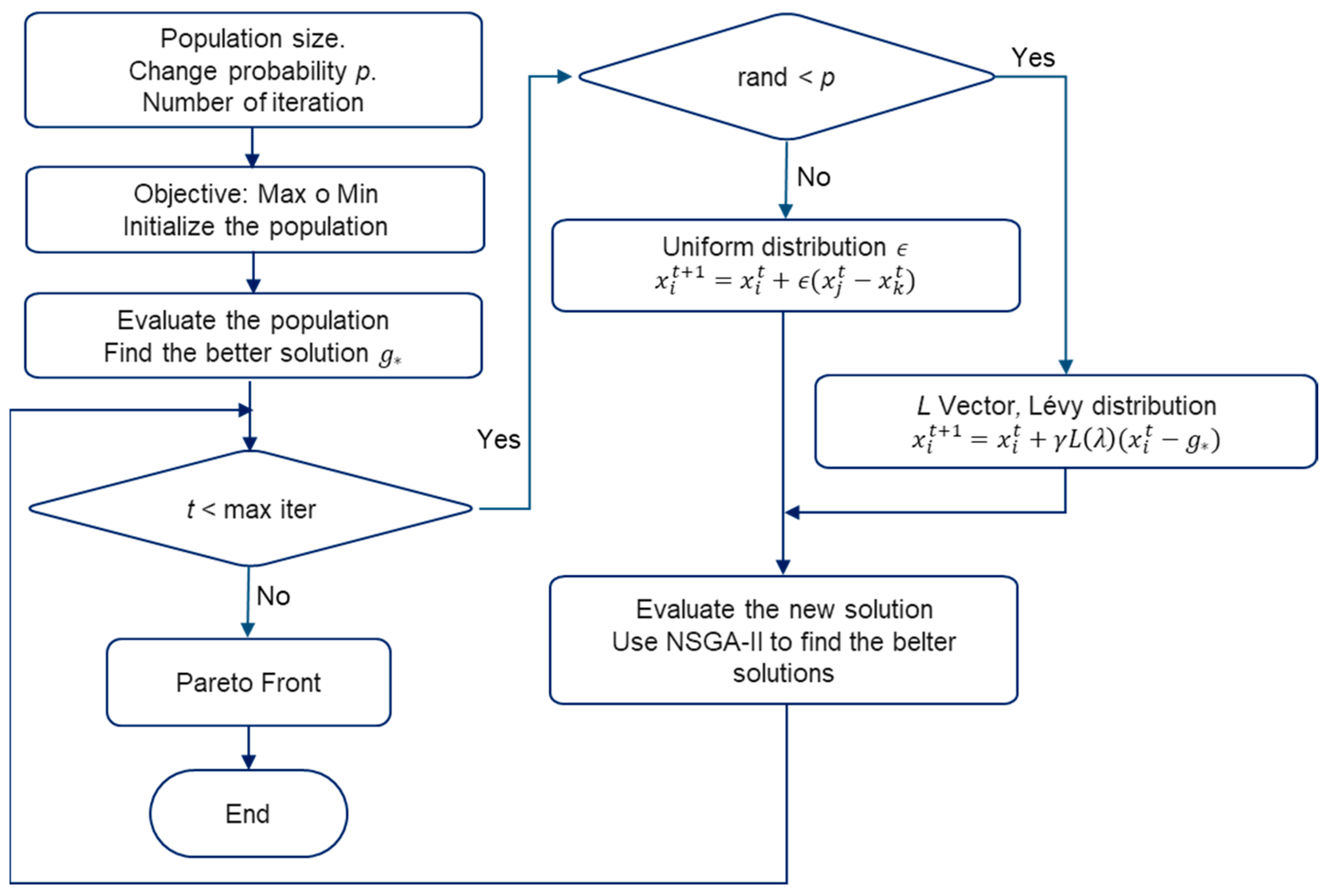
2.3. Multi-Objective Flower Pollination Algorithm
3. Results
3.1. Deformable Porous Gas Journal Bearing Performance
3.2. Optimization Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| p | Pressure, Pa. |
| pa | Atmospheric pressure, Pa. |
| ps | Supply pressure, Pa. |
| Pressure ratio, ps/pa. | |
| x | Circumferential coordinate m. |
| z | Axial coordinate, m. |
| Bearing length, m. | |
| R | Bearing radius, m. |
| r | Radius of the shaft, m. |
| c | Bearing radial clearance (c = R − r), m. |
| e | Eccentricity, m. |
| ϵ | Eccentricity ratio, . |
| h | Thickness of the lubricating film, m. |
| H | Dimensionless lubricating film thickness. |
| X | Circumferential dimensionless coordinate. |
| Z | Axial dimensionless coordinate. |
| P | Dimensionless pressure. |
| ρ | Density of the air, (1.2 kg/m3). |
| µ | Viscosity (1.85 × 10−5 Pa s). |
| k | Coefficient of permeability, m2. |
| Gas constant, J/kg K. | |
| T | Temperature, K. |
| th | Porous medium thickness, m. |
| Ω | Rotation speed, rad/s. |
| Fx | Horizontal component of force, N. |
| Fy | Vertical component of force, N. |
| F | Resultant force, N. |
| Static stiffness coefficient, N/m. | |
| Mass flow, g/s | |
| ri | Porous media inner radio, m. |
| ro | Porous media outer radio, m. |
| Radial stress, Pa. | |
| Tangential stress, Pa. | |
| Shear stress, Pa. | |
| Radial strain. | |
| Stress function, N. | |
| E | Young’s modulus, Pa. |
| Poisson’s ratio. | |
| Displacement, m. |
References
- Andrés, L.S.; Yang, J.; Devitt, A. Porous Gas Journal Bearings: An Exact Solution Revisited and Force Coefficients for Stable Rotordynamic Performance. Appl. Sci. 2021, 11, 7949. [Google Scholar] [CrossRef]
- Wardle, F. 4-Aerostatic Bearings. In Ultra-Precision Bearings; Wardle, F., Ed.; Woodhead Publishing: Oxford, UK, 2015; pp. 227–306. ISBN 978-0-85709-162-8. [Google Scholar]
- Durazo-Cardenas, I.S.; Corbett, J.; Stephenson, D.J. Permeability and Dynamic Elastic Moduli of Controlled Porosity Ultra-Precision Aerostatic Structures. Ceram. Int. 2014, 40, 3041–3051. [Google Scholar] [CrossRef]
- Silveira, Z.C.; Nicoletti, R.; Fortulan, C.A.; Purquerio, B.M. Ceramic Matrices Applied to Aerostatic Porous Journal Bearings: Material Characterization and Bearing Modeling. Cerâmica 2010, 56, 201–211. [Google Scholar] [CrossRef]
- Durazo-Cardenas, I.S.; Stephenson, D.J.; Corbett, J. Controlled Porosity Alumina Structures for Ultra-Precision Hydrostatic Journal Bearings. J. Am. Ceram. Soc. 2010, 93, 3671–3678. [Google Scholar] [CrossRef]
- Kim, J.; Ha, J.-H.; Lee, J.; Song, I.-H. Effect of Pore Structure on Gas Permeability Constants of Porous Alumina. Ceram. Int. 2019, 45, 5231–5239. [Google Scholar] [CrossRef]
- Liao, Y.; Li, X.; Zhong, W.; Tao, G.; Liu, H.; Kagawa, T. Experimental Study of Pressure Drop-Flow Rate Characteristics of Heated Tight Porous Materials. J. Fluids Eng. 2016, 138, 071102. [Google Scholar] [CrossRef]
- Zhong, W.; Ji, X.; Li, C.; Fang, J.; Liu, F. Determination of Permeability and Inertial Coefficients of Sintered Metal Porous Media Using an Isothermal Chamber. Appl. Sci. 2018, 8, 1670. [Google Scholar] [CrossRef]
- Belforte, G.; Raparelli, T.; Viktorov, V.; Trivella, A. Feeding System of Aerostatic Bearings with Porous Media. Proc. JFPS Int. Symp. Fluid Power 2005, 2005, 126–131. [Google Scholar] [CrossRef]
- Kittmer, C.A. Investigation of Permeability of Carbon-Graphite Materials; Atomic Energy of Canada Ltd.: Chalk River, ON, Canada, 1980; p. 35. [Google Scholar]
- Biloé, S.; Mauran, S. Gas Flow through Highly Porous Graphite Matrices. Carbon 2003, 41, 525–537. [Google Scholar] [CrossRef]
- Cui, H.; Wang, Y.; Yue, X.; Huang, M.; Wang, W. Effects of Manufacturing Errors on the Static Characteristics of Aerostatic Journal Bearings with Porous Restrictor. Tribol. Int. 2017, 115, 246–260. [Google Scholar] [CrossRef]
- Zeng, C.; Wang, W.; Cheng, X.; Zhao, R.; Cui, H. Three-Dimensional Flow State Analysis of Microstructures of Porous Graphite Restrictor in Aerostatic Bearings. Tribol. Int. 2021, 159, 106955. [Google Scholar] [CrossRef]
- Liu, H.; Xu, Y. Gas Permeability Measurement in Porous Graphite under Steady-State Flow. Mater. Res. Express 2022, 9, 025603. [Google Scholar] [CrossRef]
- Panzera, T.H.; Rubio, J.C.; Bowen, C.R.; Walker, P.J. Microstructural Design of Materials for Aerostatic Bearings. Cem. Concr. Compos. 2008, 30, 649–660. [Google Scholar] [CrossRef]
- da Silva, L.J.; Panzera, T.H.; Viera, L.M.G.; Bowen, C.R.; Duduch, J.G.; Rubio, J.C.C. Cementitious Porous Material Applied to Precision Aerostatics Bearings. Int. J. Precis. Eng. Manuf. 2018, 19, 239–243. [Google Scholar] [CrossRef]
- Wang, H. Graphite Solid Lubrication Materials. In Encyclopedia of Tribology; Wang, Q.J., Chung, Y.-W., Eds.; Springer: Boston, MA, USA, 2013; pp. 1550–1555. ISBN 978-0-387-92897-5. [Google Scholar]
- De Santiago, O.; Solórzano, V. Experiments With Scaled Foil Bearings in a Test Compressor Rotor. In Proceedings of the Volume 7A: Structures and Dynamics, American Society of Mechanical Engineers, San Antonio, TX, USA, 3–7 June 2013; p. V07AT29A002. [Google Scholar]
- Zhang, X.F.; Lin, B. Theoretical Research on Deformation of Porous Material in Air Bearing. Appl. Mech. Mater. 2012, 215–216, 779–784. [Google Scholar] [CrossRef]
- Cui, H.; Wang, Y.; Yue, X.; Huang, M.; Wang, W.; Jiang, Z. Numerical Analysis and Experimental Investigation into the Effects of Manufacturing Errors on the Running Accuracy of the Aerostatic Porous Spindle. Tribol. Int. 2018, 118, 20–36. [Google Scholar] [CrossRef]
- Yan, R.; Wang, L.; Wang, S. Mechanical Research on Aerostatic Guideways in Consideration of Fluid-Structure Interaction. Ind. Lubr. Tribol. 2019, 72, 285–290. [Google Scholar] [CrossRef]
- Wang, W.; Cheng, X.; Zhang, M.; Gong, W.; Cui, H. Effect of the Deformation of Porous Materials on the Performance of Aerostatic Bearings by Fluid-Solid Interaction Method. Tribol. Int. 2020, 150, 106391. [Google Scholar] [CrossRef]
- Hwang, P.; Khan, P.; Kang, S.-W. Parameter Sensitivity Analysis on Dynamic Coefficients of Partial Arc Annular-Thrust Aerostatic Porous Journal Bearings. Appl. Sci. 2021, 11, 10791. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; The MIT Press: Cambridge, MA, USA, 1992; ISBN 978-0-262-27555-2. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Yang, X.-S. Suash Deb Cuckoo Search via Lévy Flights. In Proceedings of the 2009 World Congress on Nature & Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar]
- Yang, X.-S. A New Metaheuristic Bat-Inspired Algorithm. In Nature Inspired Cooperative Strategies for Optimization (NICSO 2010); González, J.R., Pelta, D.A., Cruz, C., Terrazas, G., Krasnogor, N., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 65–74. ISBN 978-3-642-12538-6. [Google Scholar]
- Yang, X.-S. Flower Pollination Algorithm for Global Optimization. In Unconventional Computation and Natural Computation; Durand-Lose, J., Jonoska, N., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 240–249. [Google Scholar]
- Yang, X.-S.; Karamanoglu, M.; He, X. Flower Pollination Algorithm: A Novel Approach for Multiobjective Optimization. Eng. Optim. 2014, 46, 1222–1237. [Google Scholar] [CrossRef]
- Wang, N.; Chen, H.-Y. A Two-Stage Multiobjective Optimization Algorithm for Porous Air Bearing Design. Tribol. Int. 2016, 93, 355–363. [Google Scholar] [CrossRef]
- Gu, Y.; Wang, D.; Cheng, L.; Schimpf, A.; Böhle, M. A Novel Method to Achieve Fast Multi-Objective Optimization of Hydrostatic Porous Journal Bearings Used in Hydraulic Turbomachine. J. Fluids Eng. 2023, 145, 051205. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A Fast and Elitist Multiobjective Genetic Algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Sneck, H.J.; Yen, K.T. The Externally Pressurized, Porous Wall, Gas-Lubricated Journal Bearing. ASLE Trans. 1964, 7, 288–298. [Google Scholar] [CrossRef]
- Timoshenko, S.P.; Goodier, J.N.; Abramson, H.N. Theory of Elasticity (3rd Ed.). J. Appl. Mech. 1970, 37, 888. [Google Scholar] [CrossRef]
- Liu, X. A Closed-Form Solution for Stress Analysis of Hollow Circular Cylinder Structure under Non-Uniform External Load and Its Engineering Application. J. Eng. Res. 2020, 8, 72–88. [Google Scholar] [CrossRef]
- Li, W.; Wang, S.; Zhao, Z.; Zhang, K.; Feng, K.; Hou, W. Numerical and Experimental Investigation on the Performance of Hybrid Porous Gas Journal Bearings. Lubr. Sci. 2021, 33, 60–78. [Google Scholar] [CrossRef]
- Cost, J.R.; Janowski, K.R.; Rossi, R.C. Elastic Properties of Isotropic Graphite. Philos. Mag. J. Theor. Exp. Appl. Phys. 1968, 17, 851–854. [Google Scholar] [CrossRef]
- Duran-Castillo, A.; Jauregui-Correa, J.C.; De Santiago, O. Numerical Comparison of Two Methods for Predicting the Porous Gas Bearing Pressure. Meccanica 2024, 59, 859–874. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Dimension | Unit |
|---|---|---|
| Length, l. | 57 | mm |
| Inner diameter, ID | 25 | mm |
| Porous layer radial thickness, th | 2.5 | mm |
| Clearance, c | 31 | µm |
| Carbon-graphite permeability, k | 1.0 × 10−15 | m2 |
| Specific load, paLD | 143.9 | N |
| Elastic modulus, E | 12 × 109 | Pa |
| Poisson relation, ν | 0.3 |
| Variable | Dimension | Unit |
|---|---|---|
| Length, l | 88.9 | mm |
| Inner diameter, ID | 76.2 | mm |
| Porous layer radial thickness, th | 2.79 | mm |
| Clearance, c | 10 | µm |
| Carbon-graphite permeability, k | 1.85 × 10−15 | m2 |
| Specific load, paLD | 684.2 | N |
| Elastic modulus, E | 12 × 109 | Pa |
| Poisson relation, ν | 0.3 |
| Variable | Dimension/Range | Unit |
|---|---|---|
| Inner diameter, ID | 50.8 | mm |
| Carbon-graphite permeability, k | 1.85 × 10−15 | m2 |
| Elastic modulus, E | 12 × 109 | Pa |
| Poisson relation, ν | 0.3 | |
| Eccentricity ratio | 0.1 | |
| Clearance, c | 8–30 | µm |
| Porous layer radial thickness, th | 2–20 | mm |
| Supply pressure, ps | 0.20–1.20 | MPa |
| Rotational speed, Ω | 0–753.98 | rad/s |
| Length, l | 50.8–101.6 | mm |
| Zone | Resultant Force (N) | Static Stiffness Coefficient (MN/m) | Airflow (g/s) | |||
|---|---|---|---|---|---|---|
| MOFPA | MOCS | MOFPA | MOCS | MOFPA | MOCS | |
| 1 | 112.1 | 80.8 | 140.1 | 100.9 | 0.007 | 0.005 |
| 2 | 182.1 | 162.9 | 227.6 | 203.6 | 0.051 | 0.031 |
| 3 | 226.6 | 228.7 | 283.2 | 285.7 | 0.130 | 0.135 |
| 4 | 252.7 | 261.8 | 315.9 | 327.1 | 0.199 | 0.227 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duran-Castillo, A.; Jauregui-Correa, J.C.; Benítez-Rangel, J.P.; Dominguez-Gonzalez, A.; De Santiago, O.C. Multi-Objective Optimization Design of Porous Gas Journal Bearing Considering the Fluid–Structure Interaction Effect. Appl. Mech. 2024, 5, 600-618. https://doi.org/10.3390/applmech5030034
Duran-Castillo A, Jauregui-Correa JC, Benítez-Rangel JP, Dominguez-Gonzalez A, De Santiago OC. Multi-Objective Optimization Design of Porous Gas Journal Bearing Considering the Fluid–Structure Interaction Effect. Applied Mechanics. 2024; 5(3):600-618. https://doi.org/10.3390/applmech5030034
Chicago/Turabian StyleDuran-Castillo, Azael, Juan Carlos Jauregui-Correa, Juan Primo Benítez-Rangel, Aurelio Dominguez-Gonzalez, and Oscar Cesar De Santiago. 2024. "Multi-Objective Optimization Design of Porous Gas Journal Bearing Considering the Fluid–Structure Interaction Effect" Applied Mechanics 5, no. 3: 600-618. https://doi.org/10.3390/applmech5030034