Hierarchical Geometry Verification via Maximum Entropy Saliency in Image Retrieval

Abstract
:1. Introduction
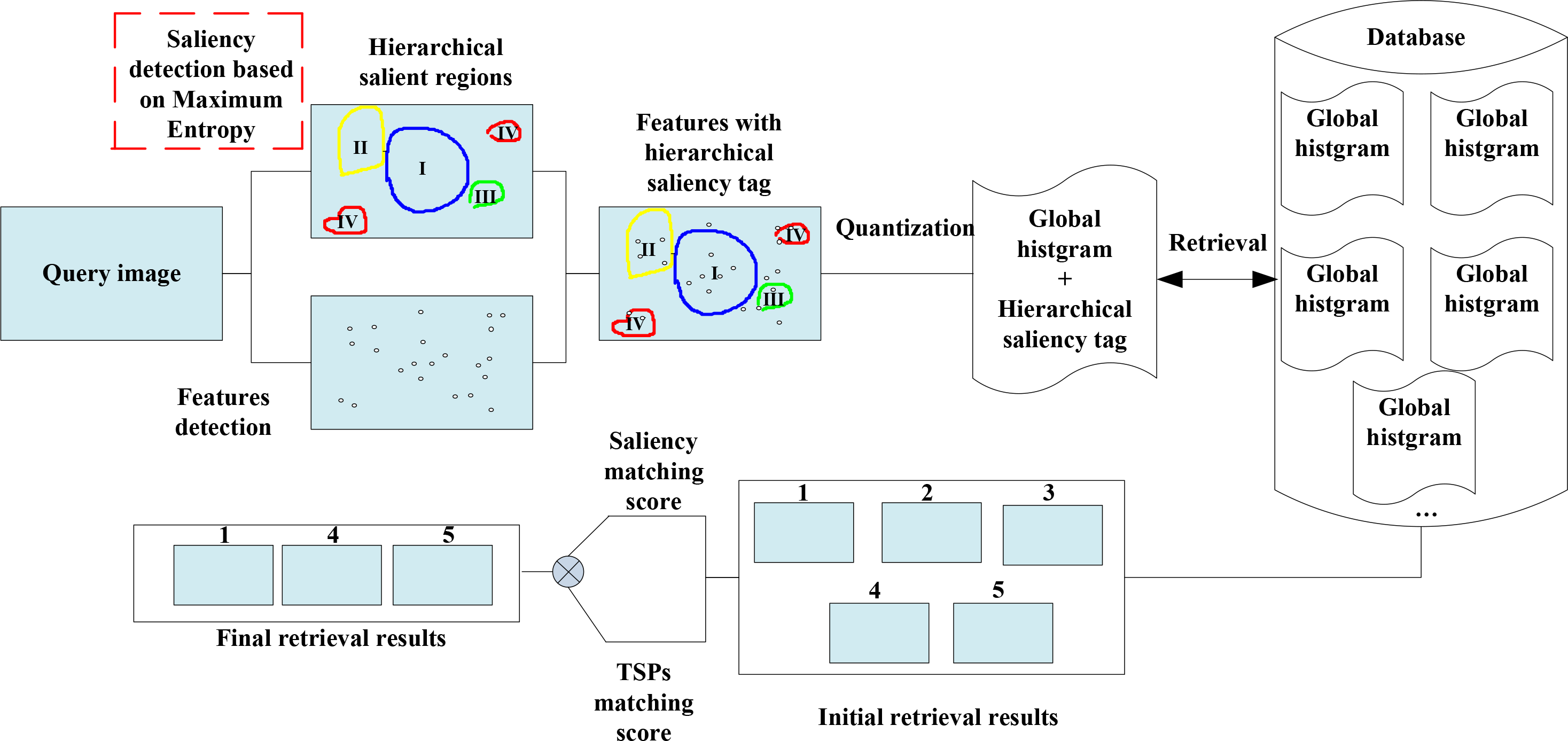
2. The Image Retrieval Framework with Hierarchical Salient Regions Based on Maximum Entropy
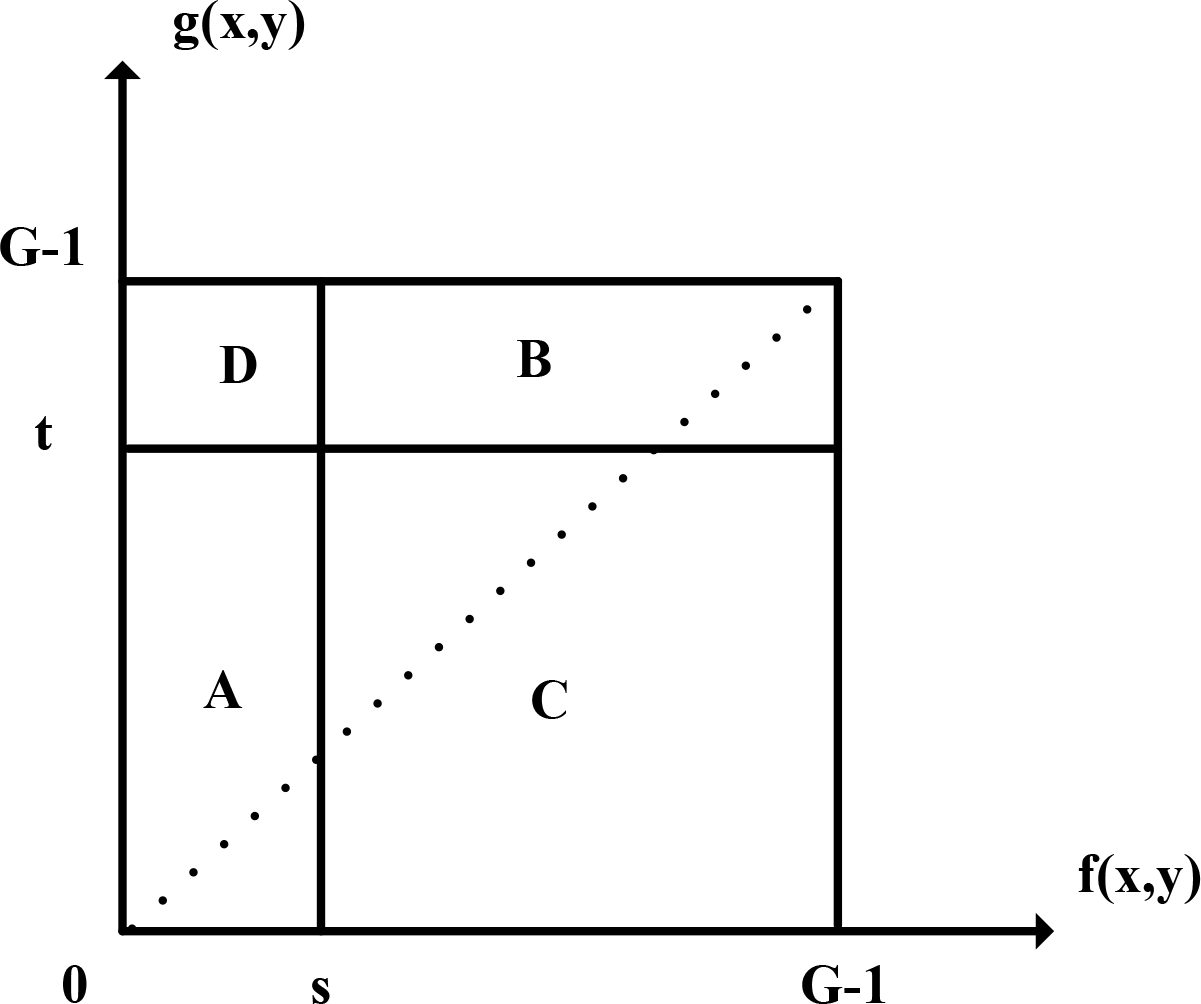
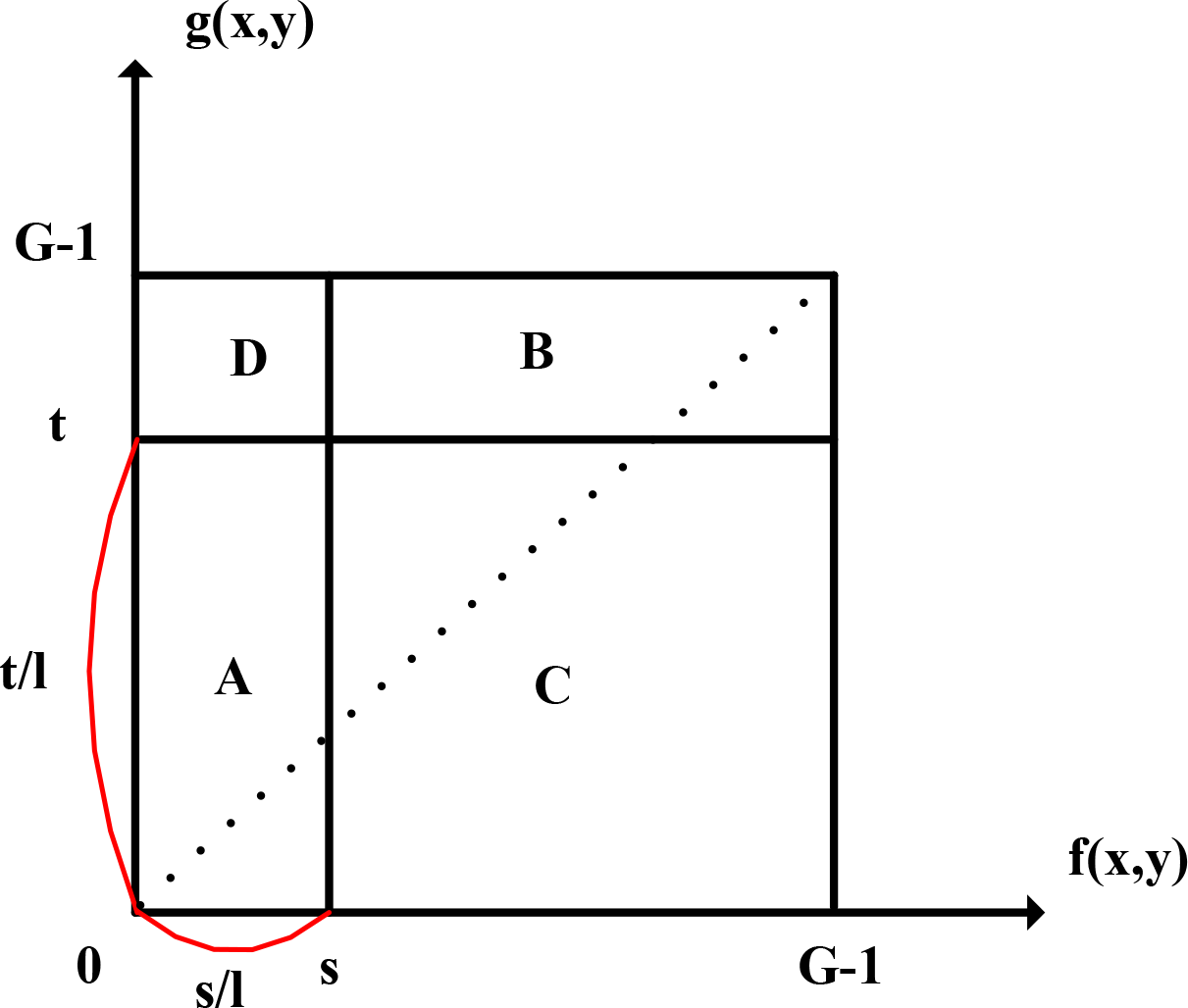
3. Hierarchical Saliency Generation Based on Maximum Entropy Principle
4. Geometric Verification Based on Hierarchical Salient Regions and Triangle Spatial Pattern
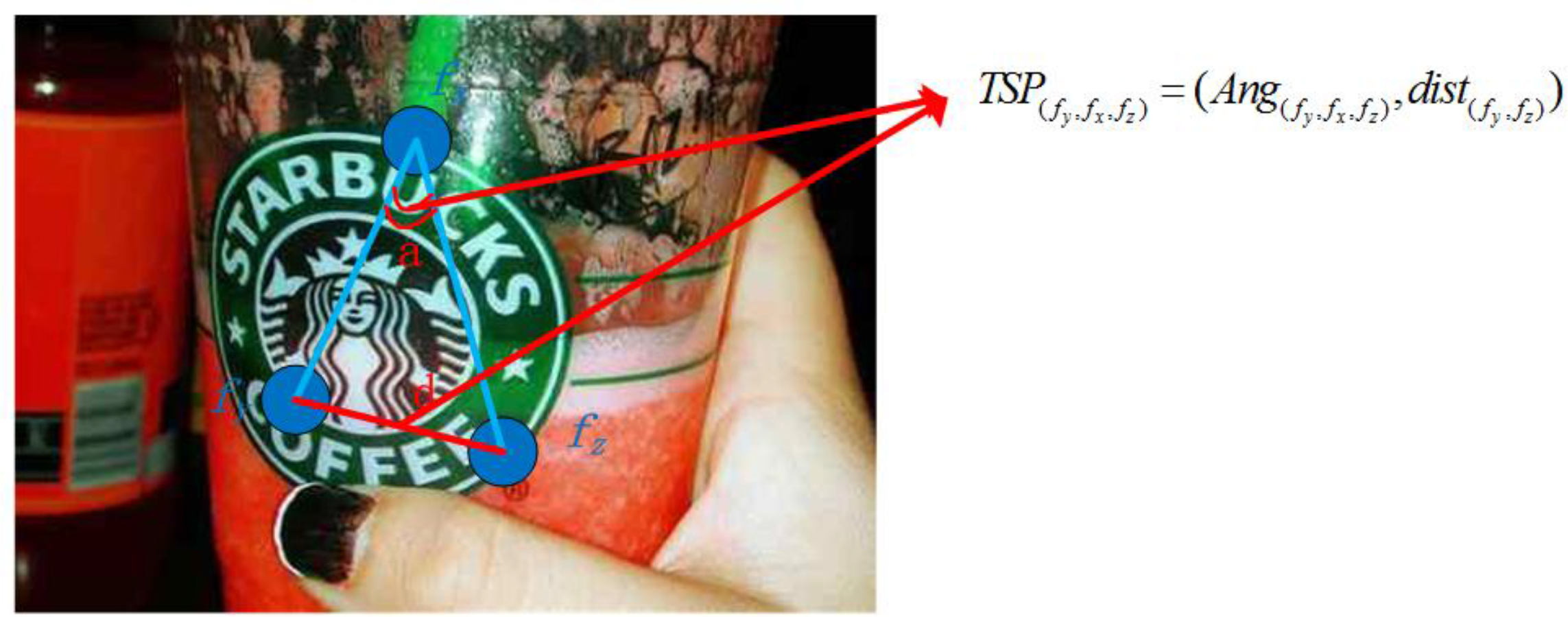
4.1. Triangle Spatial Pattern (TSP)
4.2. Geometric Verification with Hierarchical Salient Regions and TSP
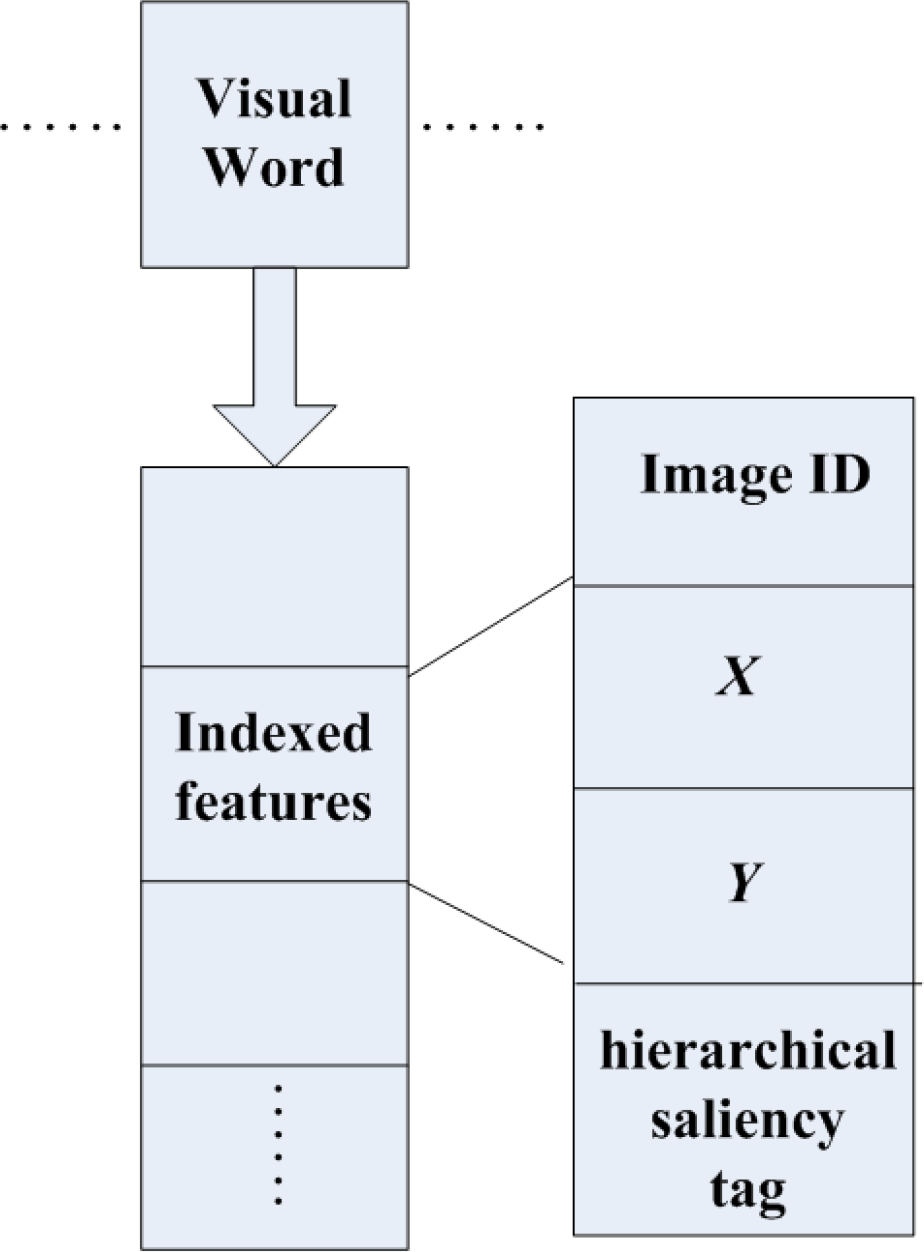
4.3. Matching TSPs
4.4. Re-Rank Score of a Candidate Image
5. Experimental Section
5.1. Datasets
5.2. Experiment Preparations
5.3. Evaluation Protocol
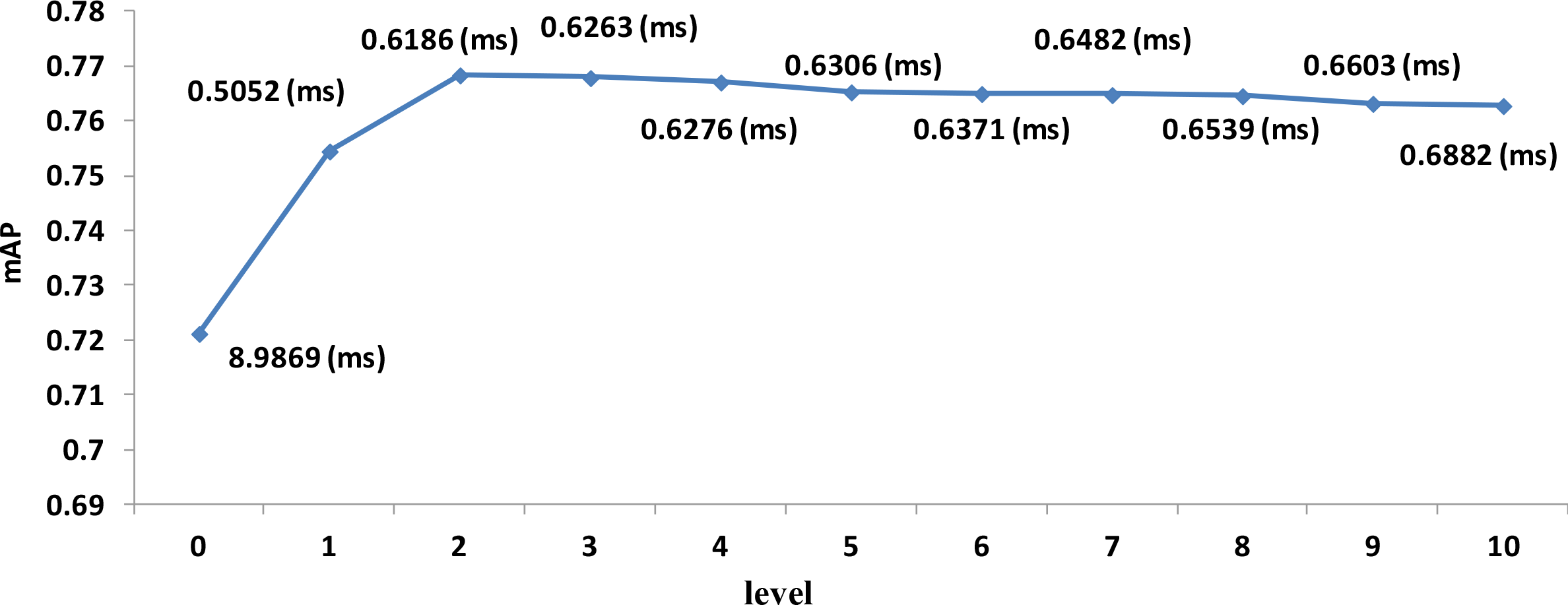
5.4. Evaluation for Level in Hierarchical Saliency
5.5. Hierarchical Saliency’s Effect in Image Retrieval
5.6. Hierarchical Saliency’s Effect on Other Geometry Verification Methods
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Datta, R.; Joshi, D.; Li, J.; Wang, J.Z. Image retrieval: Ideas, influences, and trends of the new age. ACM Comput. Surv 2008, 40. [Google Scholar] [CrossRef]
- Bhandari, K.; Dugar, N.; Jain, N.; Shetty, N. A novel high performance multi-modal approach for content based image retrieval. In Proceedings of the International Conference and Workshop on Emerging Trends in Technology 2010, ICWET 2010, Mumbai, Maharashtra, India, 26–27 February 2010; Association for Computing Machinery: Mumbai, Maharashtra, India, 2010; pp. 253–256. [Google Scholar]
- Fiala, M. Using normalized interest point trajectories over scale for image search. In Proceedings of the 3rd Canadian Conference on Computer and Robot Vision, CRV 2006, Quebec City, QC, Canada, 7–9 June 2006.
- Zhang, Z.-H.; Quan, Y.; Li, W.-H.; Guo, W. A new content-based image retrieval. In Proceedings of the 2006 International Conference on Machine Learning and Cybernetics, Dalian, China, 13–16 August 2006; pp. 4013–4018.
- Yue, L.; Wan, S.; Jin, P. An approach for image retrieval based on visual saliency. In Proceedings of International Conference on Image Analysis and Signal Processing, Taizhou, China, 11–12 April 2009; pp. 172–175.
- Liu, Y.; Zhang, D.; Lu, G.; Ma, W.-Y. A survey of content-based image retrieval with high-level semantics. Pattern Recogn 2007, 40, 262–282. [Google Scholar]
- Rutishauser, U.; Walther, D.; Koch, C.; Perona, P. Is bottom-up attention useful for object recognition? In Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, CVPR 2004, Washington, DC, USA, 27 June–2 July 2004; 32, pp. II-37–II-44.
- Walther, D.; Koch, C. Modeling attention to salient proto-objects. Neural Netw 2006, 19, 1395–1407. [Google Scholar]
- Kadir, T.; Brady, M. Saliency, scale and image description. Int. J. Comput. Vis 2001, 45, 83–105. [Google Scholar]
- Soares, R.D.C.; Silva, I.R.D.; Guliato, D. Spatial locality weighting of features using saliency map with a bag-of-visual-words approach. In Proceedings of the 2012 IEEE 24th International Conference on Tools with Artificial Intelligence, ICTAI 2012, Athens, Greece, 7–9 November 2012; pp. 1070–1075.
- Sivic, J.; Zisserman, A. Video Google: A text retrieval approach to object matching in videos. Proceedings of the 2003 Ninth IEEE International Conference on Computer Vision, Nice, France, 11–17 October 2003; pp. 1470–1477.
- Chum, O.; Perdoch, M.; Matas, J. Geometric min-hashing: Finding a (thick) needle in a haystack. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2009, Miami, FL, USA, 20–25 June 2009; pp. 17–24.
- Jegou, H.; Douze, M.; Schmid, C. Hamming embedding and weak geometric consistency for large scale image search. In Computer Vision–ECCV 2008; Springer: New York, NY, USA, 2008; pp. 304–317. [Google Scholar]
- Philbin, J.; Chum, O.; Isard, M.; Sivic, J.; Zisserman, A. Object retrieval with large vocabularies and fast spatial matching. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2007, Minneapolis, MN, USA, 18–23 June 2007; pp. 1–8.
- Wu, Z.; Ke, Q.; Isard, M.; Sun, J. Bundling features for large scale partial-duplicate web image search. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2009, Miami, FL, USA, 20–25 June 2009; pp. 25–32.
- Zhao, W.-L.; Wu, X.; Ngo, C.-W. On the annotation of web videos by efficient near-duplicate search. IEEE Trans. Multimed 2010, 12, 448–461. [Google Scholar]
- Xie, H.; Gao, K.; Zhang, Y.; Li, J. Local geometric consistency constraint for image retrieval. In Proceedings of the 2011 18th IEEE International Conference on Image Processing, ICIP 2011, Brussels, Belgium, 11–14 September 2011; pp. 101–104.
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis 2004, 60, 91–110. [Google Scholar]
- Tsai, S.S.; Chen, D.; Takacs, G.; Chandrasekhar, V.; Vedantham, R.; Grzeszczuk, R.; Girod, B. Fast geometric re-ranking for image-based retrieval. In Proceedings of the 2010 17th IEEE International Conference on Image Processing, ICIP 2010, Hong Kong, China, 26–29 September 2010; pp. 1029–1032.
- Harel, J.; Koch, C.; Perona, P. Graph-based visual saliency. In Proceedings of the Advances in neural information processing systems, Vancouver, BC, Canada, 4–7 December 2006; pp. 545–552.
- Luo, G.; Huang, W.; Li, S. 2-D maximum entropy spermatozoa image segmentation based on Canny operator. In Proceedings of the 2010 IEEE International Conference on Intelligent Computing and Integrated Systems, ICISS 2010, Guilin, China, 22–24 October 2010; pp. 243–246.
- Wuhib, F.; Dam, M.; Stadler, R. Decentralized detection of global threshold crossings using aggregation trees. Comput. Netw 2008, 52, 1745–1761. [Google Scholar]
- Zhang, B.; Zhong, B.; Cao, Y. Complex background modeling based on texture pattern flow with adaptive threshold propagation. J. Vis. Commun. Image Represent 2011, 22, 516–521. [Google Scholar]
- Chao, D.C.; Scheinhorn, D.J. Determining the best threshold of rapid shallow breathing index in a therapist-implemented patient-specific weaning protocol. Respir. Care 2007, 52, 159–165. [Google Scholar]
- Kapur, J.; Sahoo, P.K.; Wong, A. A new method for gray-level picture thresholding using the entropy of the histogram. Comput. Vis. Graph. Image Process 1985, 29, 273–285. [Google Scholar]
- Itti, L.; Koch, C.; Niebur, E. A model of saliency-based visual attention for rapid scene analysis. IEEE Trans. Pattern Anal. Mach. Intell 1998, 20, 1254–1259. [Google Scholar]
- Milanese, R.; Wechsler, H.; Gill, S.; Bost, J.-M.; Pun, T. Integration of bottom-up and top-down cues for visual attention using non-linear relaxation. In Proceedings of the 1994 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, CVPR 1994, Seattle, WA, USA, 21–23 June 1994; pp. 781–785.
- Maki, A.; Nordlund, P.; Eklundh, J.-O. A computational model of depth-based attention. In Proceedings of the 1996 13th International Conference on Pattern Recognition, Vienna, Austria, 25–29 August 1996; pp. 734–739.
- Gopalakrishnan, V.; Hu, Y.; Rajan, D. Random walks on graphs to model saliency in images. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2009, Miami, FL, USA, 20–25 June 2009; pp. 1698–1705.
- Costa, L.D.F. Visual saliency and attention as random walks on complex networks. 2006. arXiv preprint physics/0603025. [Google Scholar]
- DupImage. Available online: https://dl.dropboxusercontent.com/u/42311725/DupGroundTruthDataset.rar. (accessed on 10 July 2014).
- Flickr. Available online: http://www.flickr.com/ (accessed on 10 July 2014).
- Image.vary.jpg. Available online: http://www.db.stanford.edu/~wangz/image.vary.jpg.tar (accessed on 10 July 2014).
- Nister, D.; Stewenius, H. Scalable recognition with a vocabulary tree. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, CVPR 2006, New York, NY, USA, 17–22 June 2006; pp. 2161–2168.
- Philbin, J.; Chum, O.; Isard, M.; Sivic, J.; Zisserman, A. Object retrieval with large vocabularies and fast spatial matching. In Proceedings of the 2007 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, CVPR 2007, Minneapolis, MN, USA, 17–22 June 2007.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Features exaction (query image) [s] | Retrieval [s] | Per retrieval image Geometric verification [ms] | Total time [s] |
|---|---|---|---|---|
| BOW | 0.1903 | 0.0053 | - | 0.2043 |
| TSP | 0.1903 | 0.0053 | 8.9869 | 9.1825 |
| HGV (level = 2) | 1.0406 | 0.0053 | 0.6186 | 1.6645 |
| Method | Per retrieval image Geometric verification [ms] |
|---|---|
| LGSS | 0.3660 |
| LGSS + hierachical saliency (level = 2) | 0.3127 |
| WGC | 0.2285 |
| WGC + hierachical saliency (level = 2) | 0.2789 |
| LGC | 0.6597 |
| LGC + hierachical saliency (level = 2) | 0.6358 |
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Zhao, H.; Li, Q.; Liu, P. Hierarchical Geometry Verification via Maximum Entropy Saliency in Image Retrieval. Entropy 2014, 16, 3848-3865. https://doi.org/10.3390/e16073848
Zhao H, Li Q, Liu P. Hierarchical Geometry Verification via Maximum Entropy Saliency in Image Retrieval. Entropy. 2014; 16(7):3848-3865. https://doi.org/10.3390/e16073848
Chicago/Turabian StyleZhao, Hongwei, Qingliang Li, and Pingping Liu. 2014. "Hierarchical Geometry Verification via Maximum Entropy Saliency in Image Retrieval" Entropy 16, no. 7: 3848-3865. https://doi.org/10.3390/e16073848