An Improved Direction Finding Algorithm Based on Toeplitz Approximation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. System Model and the MUSIC-Like Algorithm
2.1. System Model
2.2. The MUSIC-LIKE Algorithm
3. The Proposed Algorithm
3.1. The Effective Array Aperture Extended
3.2. The TFOC-MUSIC Algorithm
- Step 2 Take out the 1th to Nth and all kNth (k = 2, …, N) rows of Ĉ4 in order, and then store these rows in the 1th to 2N-1th row of the R̂4 matrix.
- Step 3 Gain the columns of R̂4 via using its conjugate symmetry for reducing computation.
- Step 5 Remove the redundant items of the expanded steering vector b(θ), the rest items can be rewritten as a new vector d(θ) = [1, …, p2N−2]T according to the ascending order.
- Step 6 The estimate of DOAs of source directions can be attained by searching the peaks of redefined spatial spectrum p(θ), which can be expressed as
3.3. Complexity
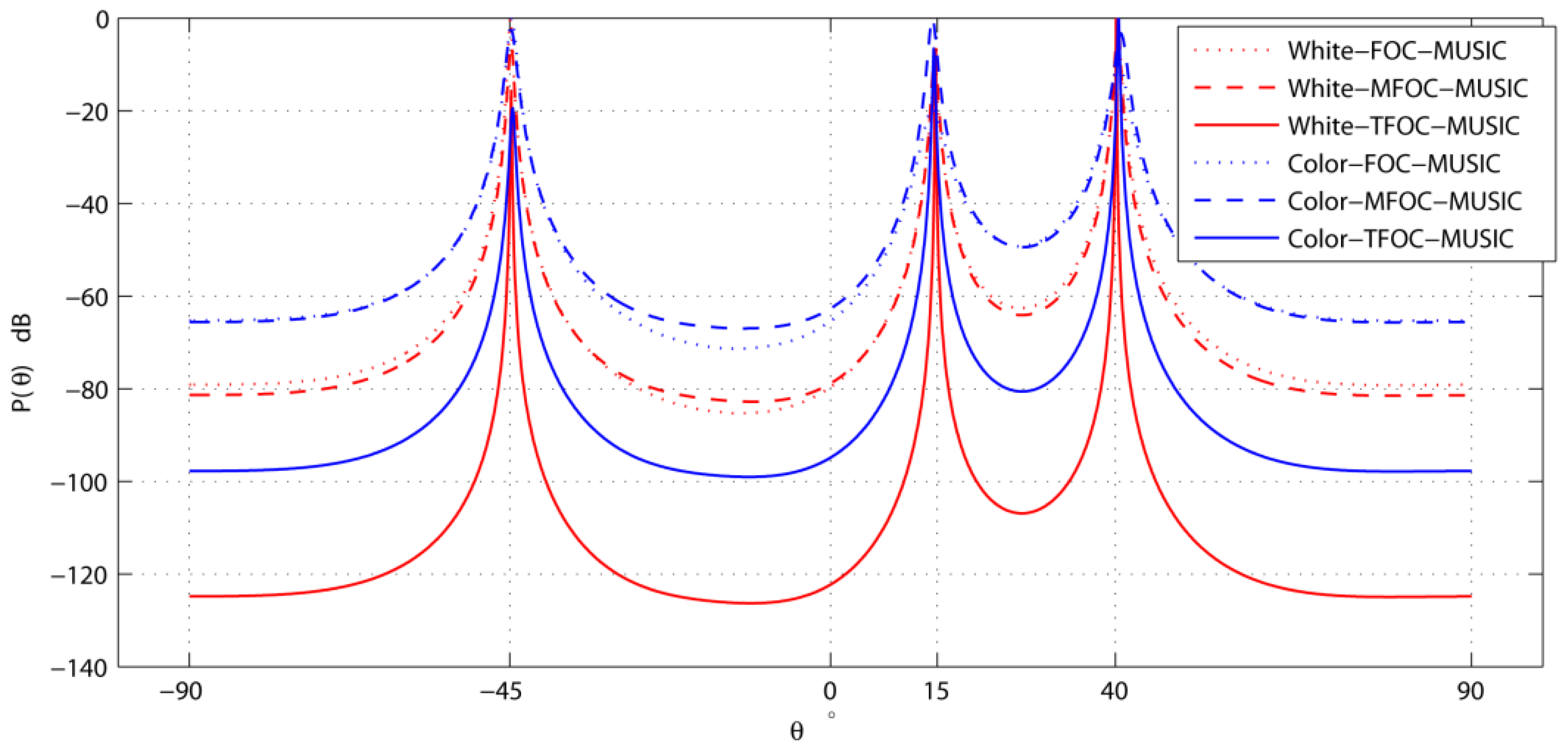
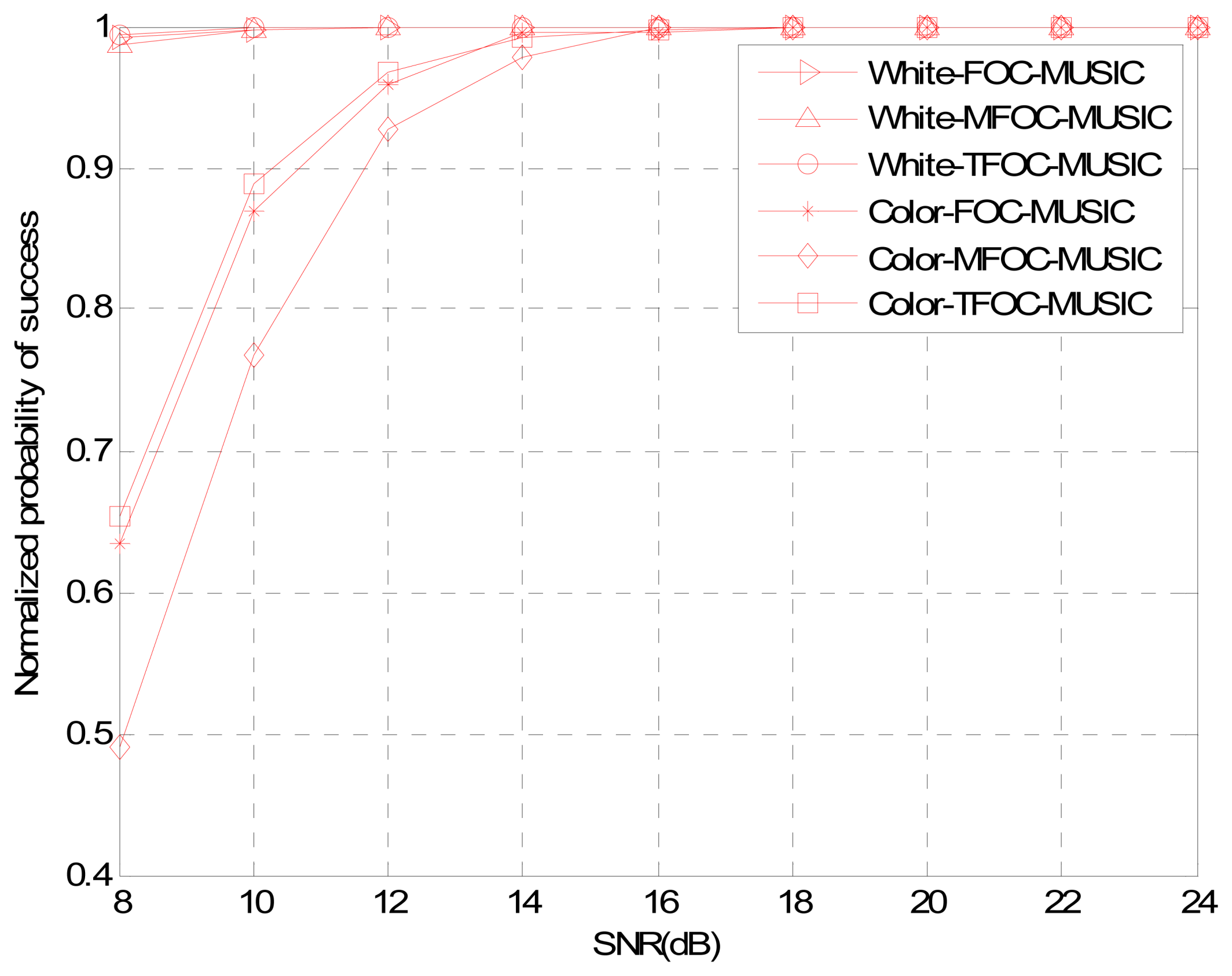
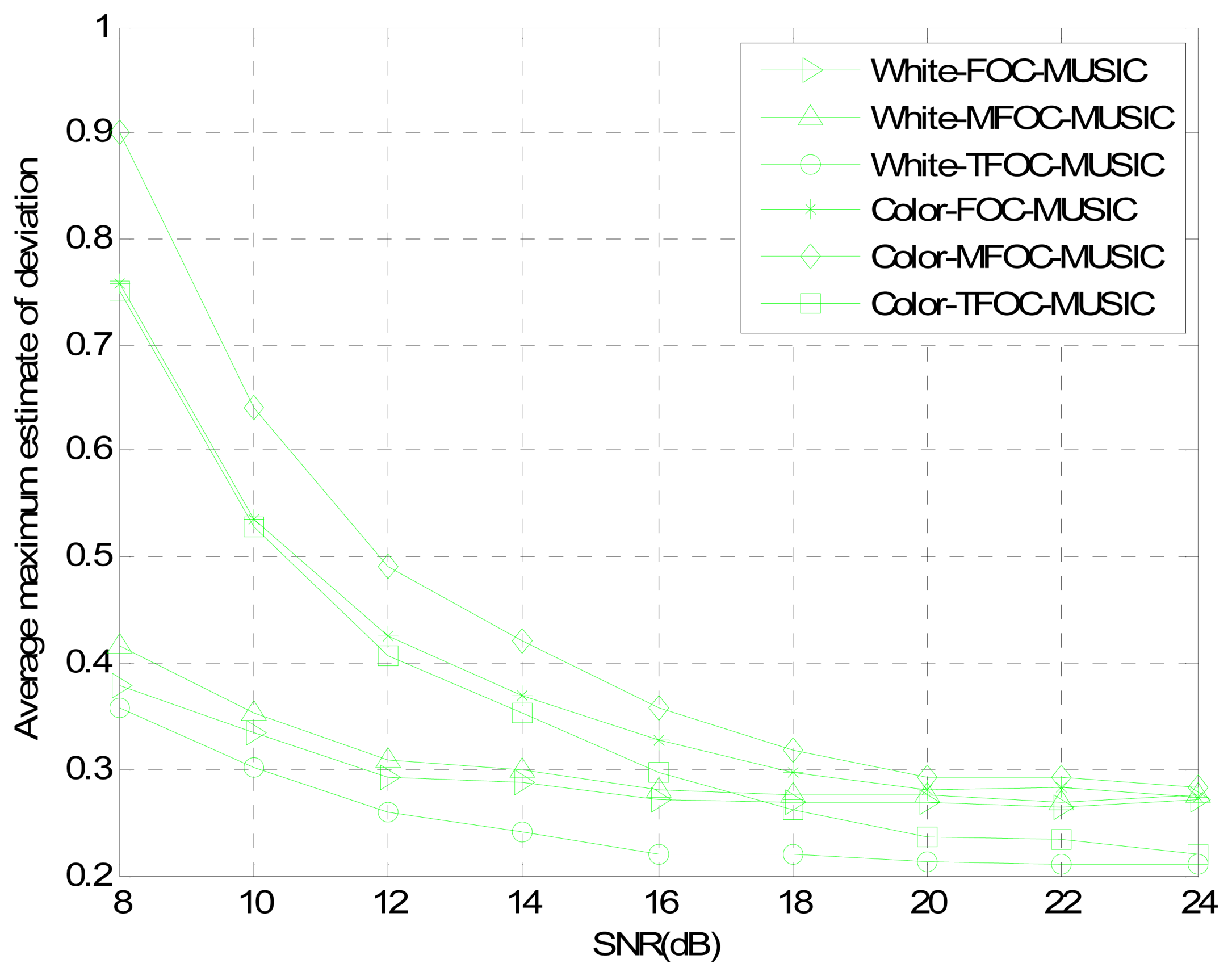
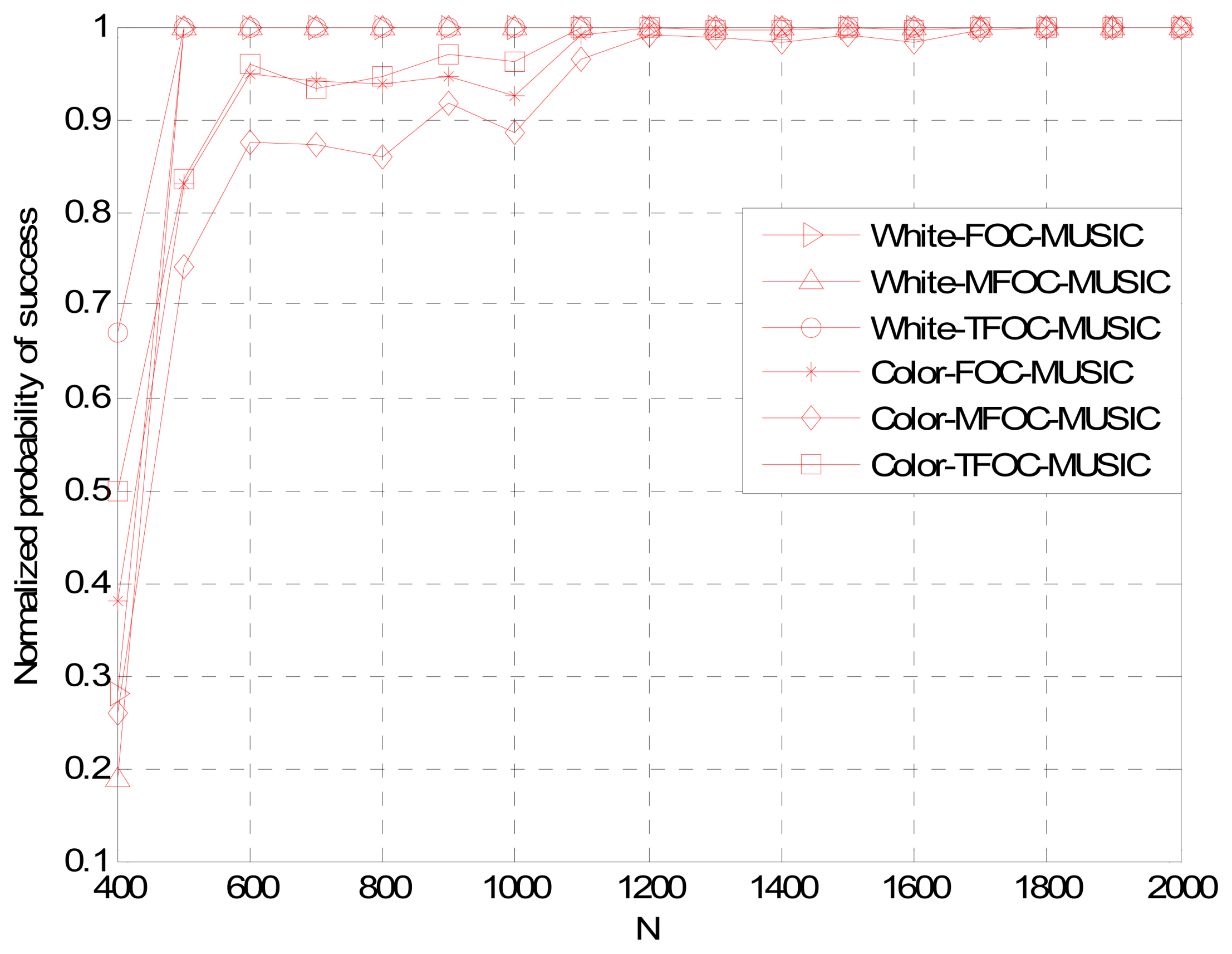
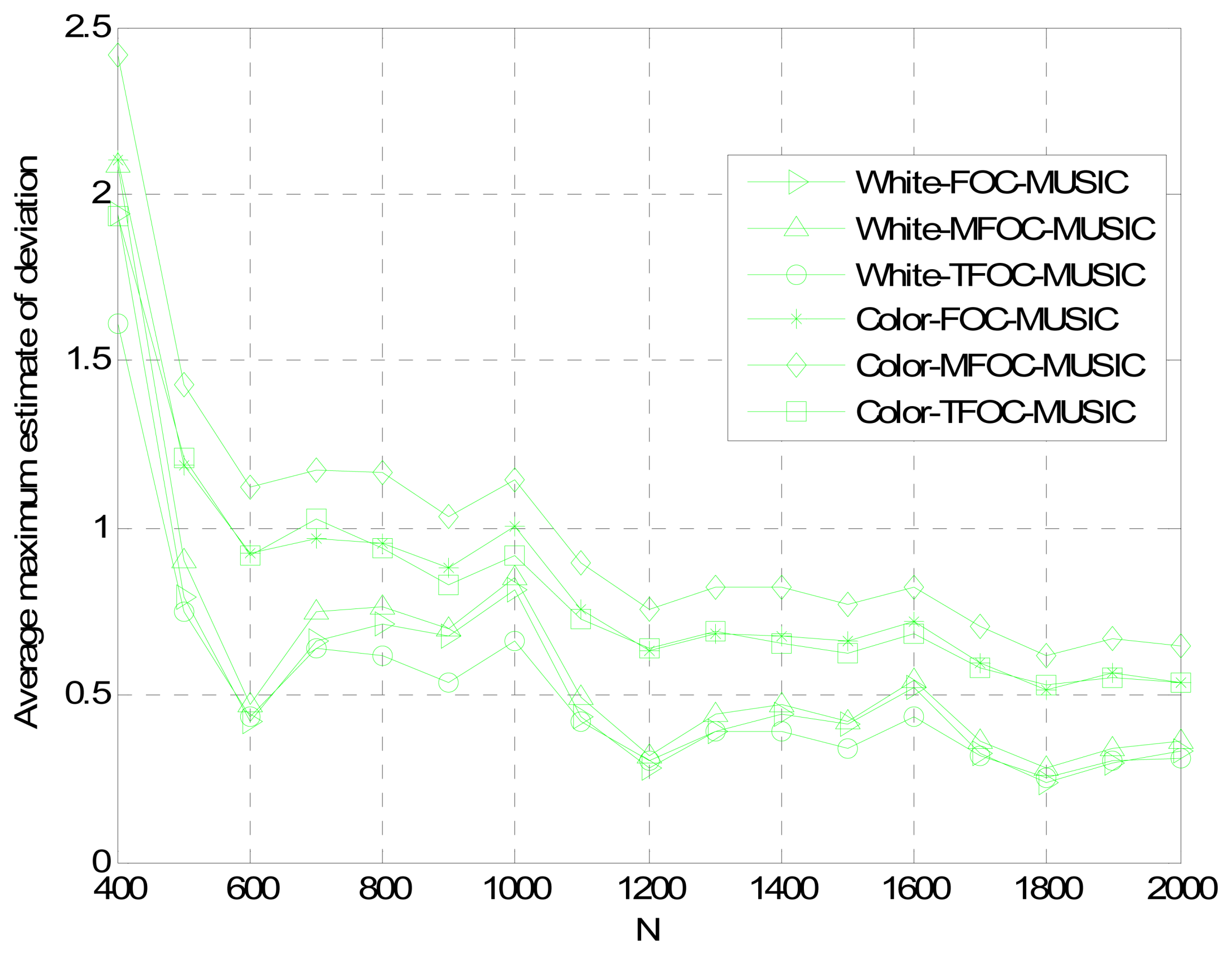
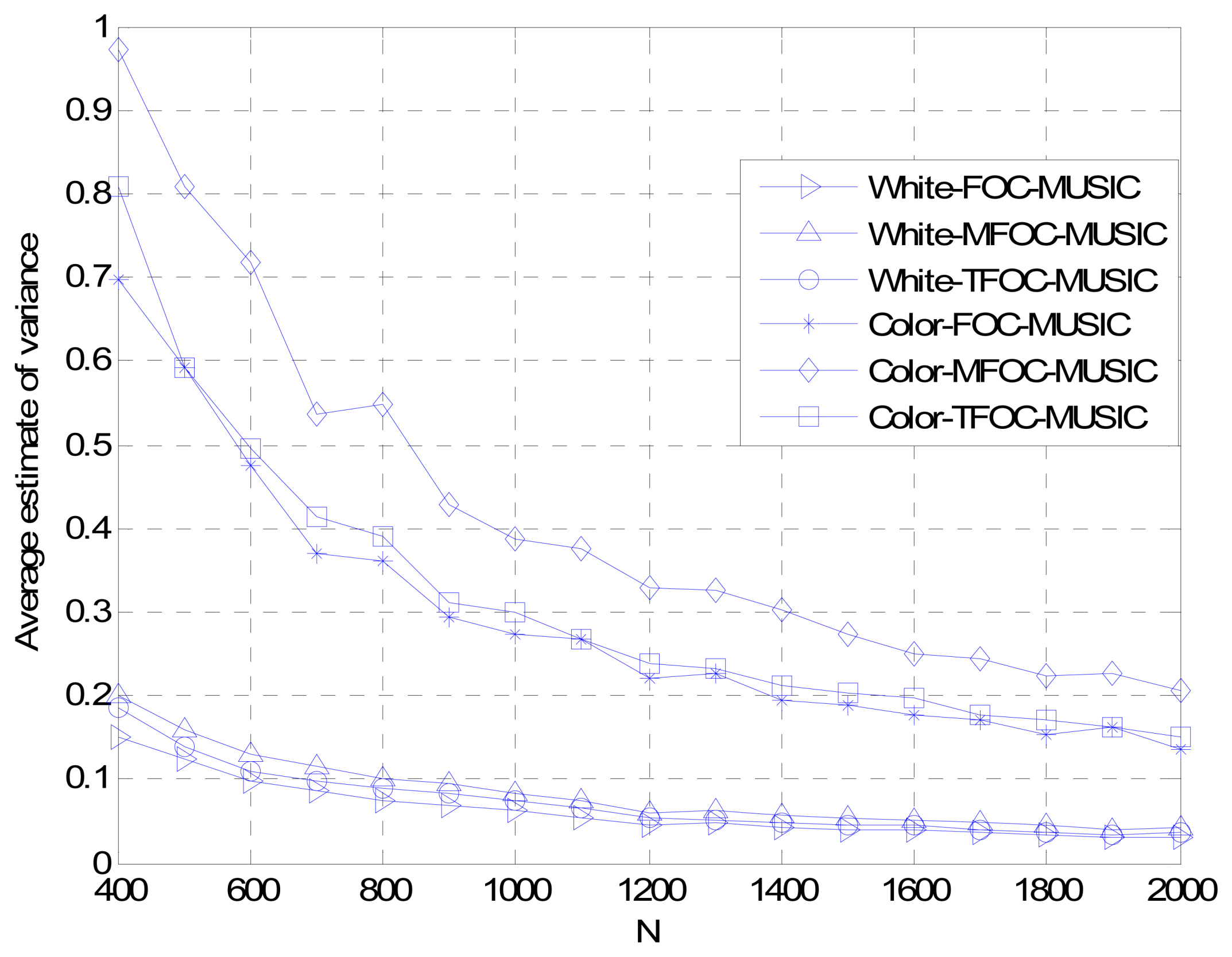
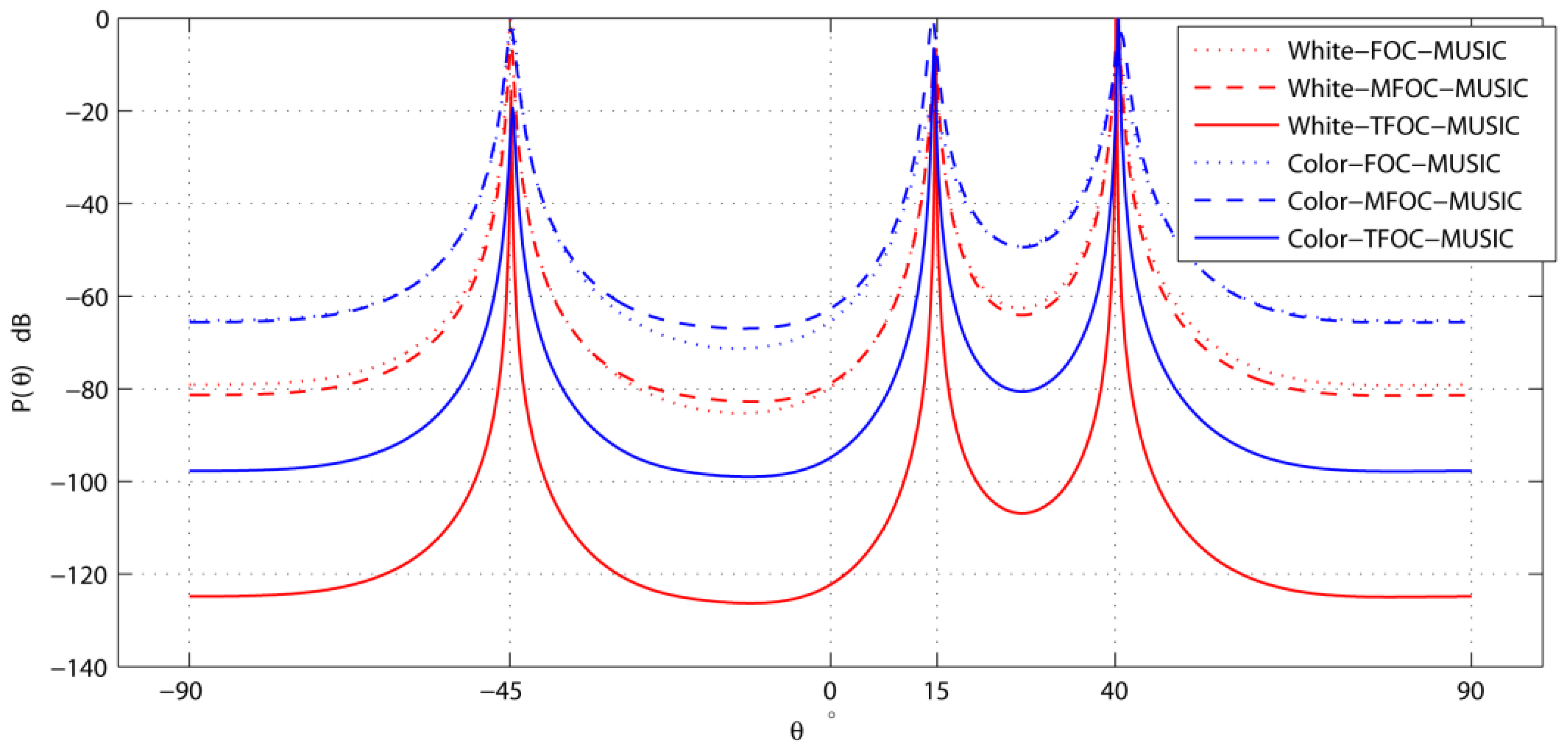
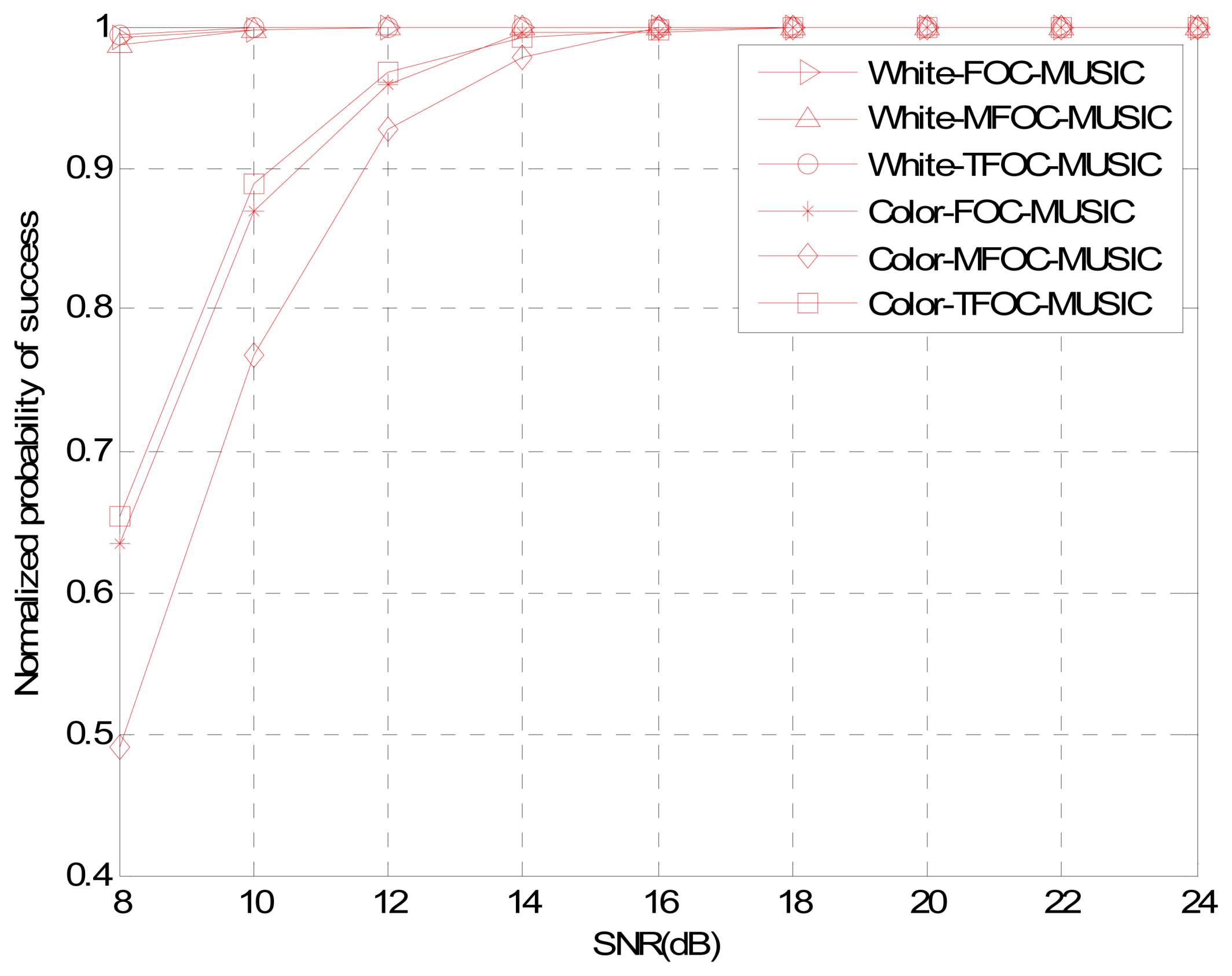
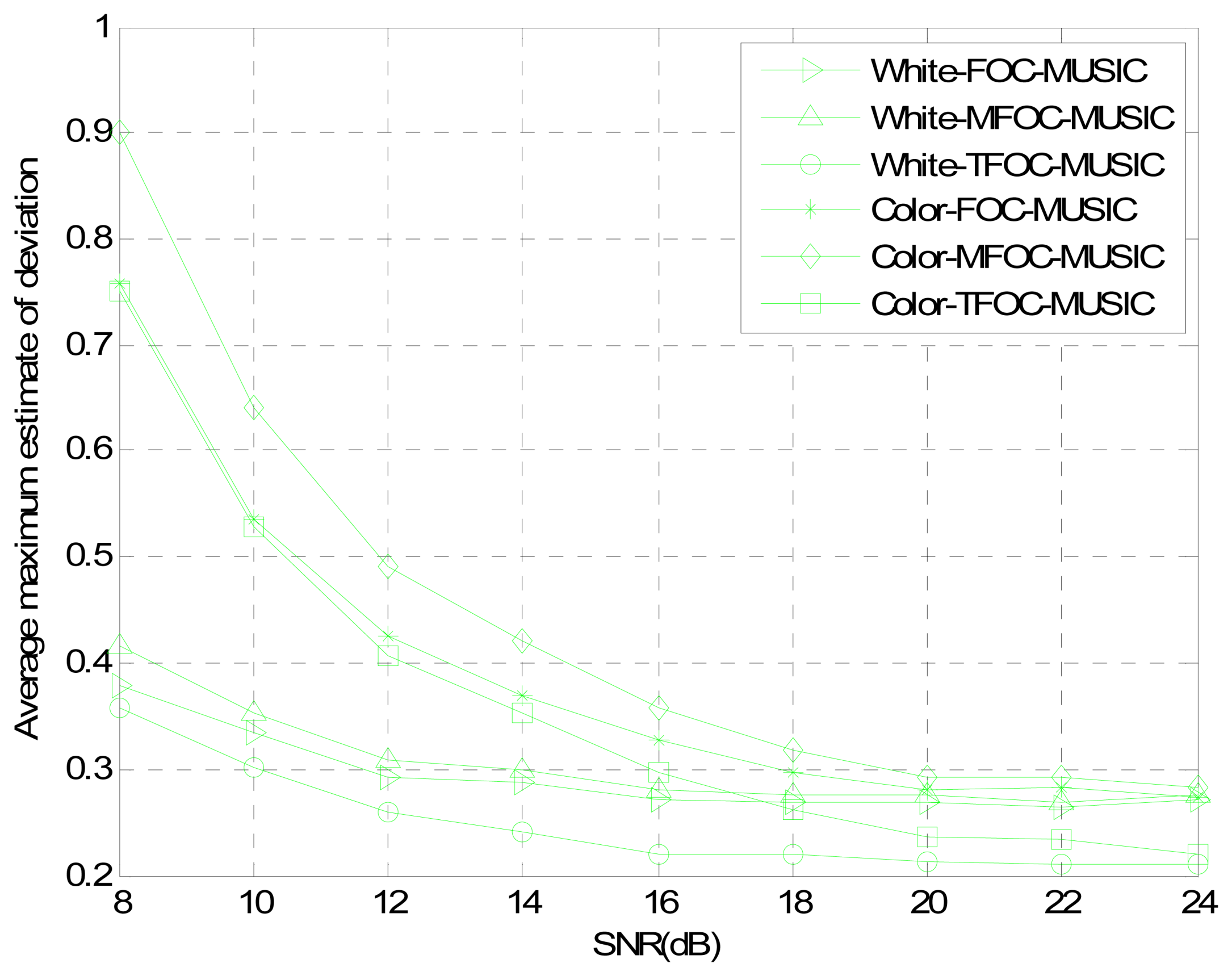
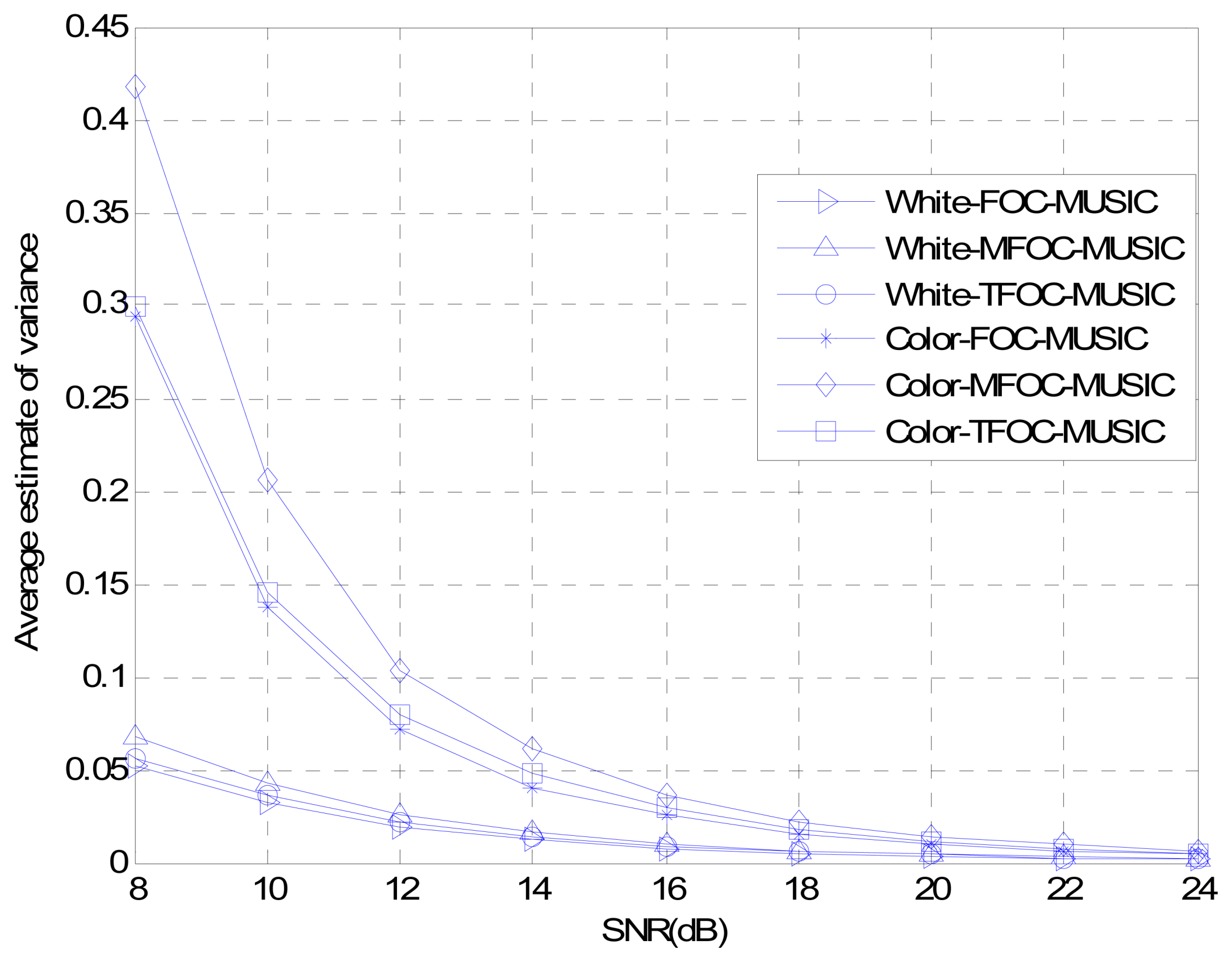
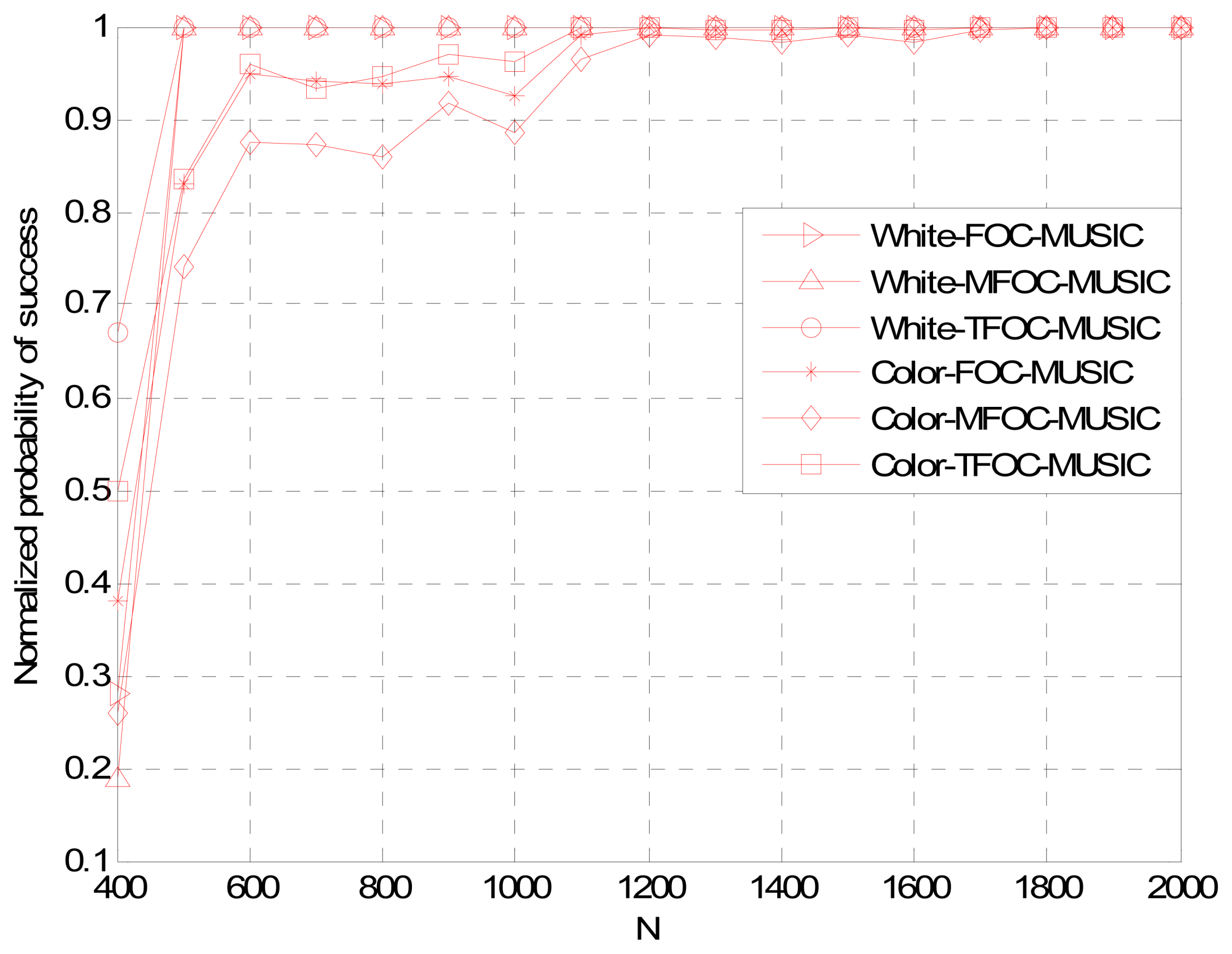
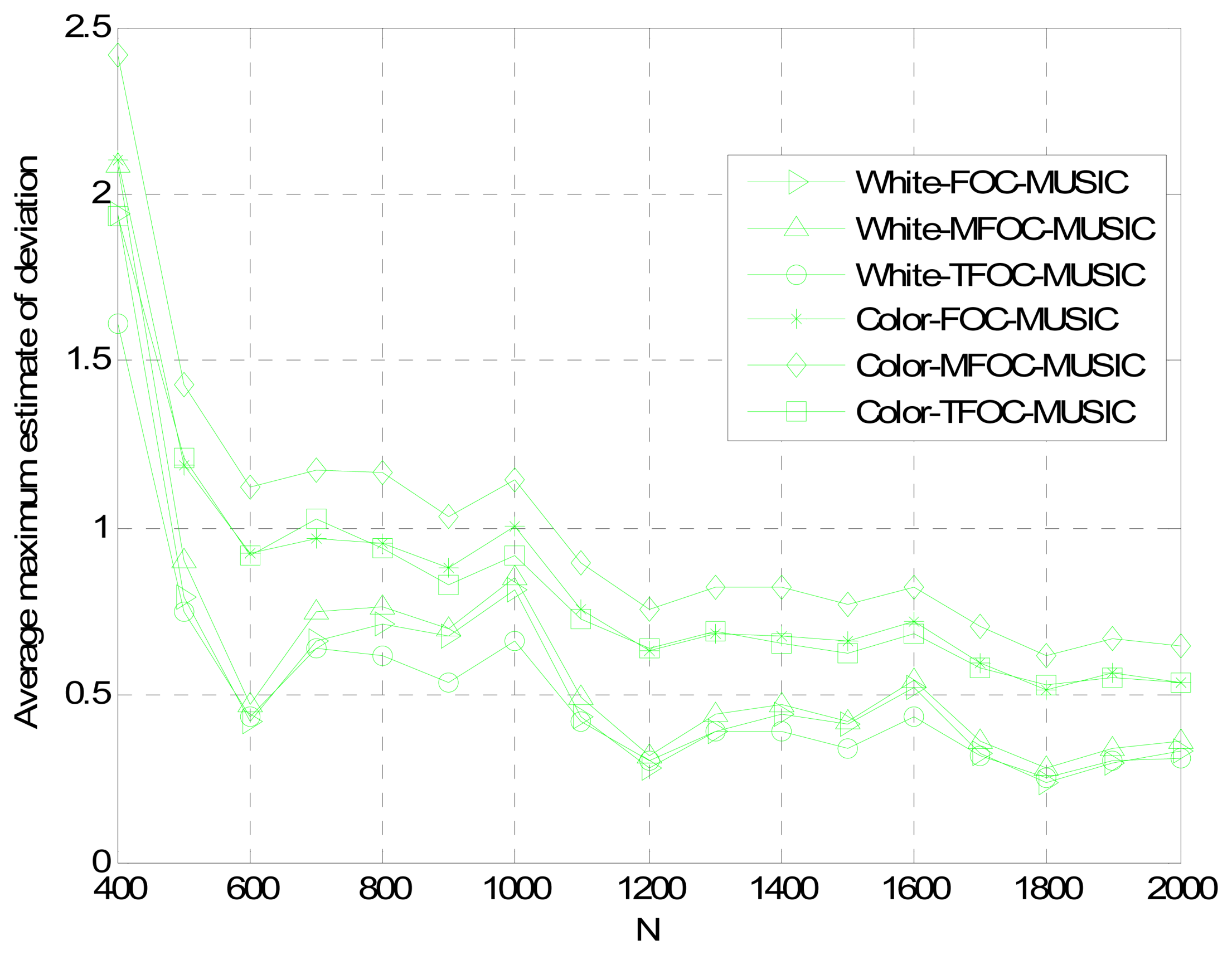
4. Performance Analysis
Case 1
Case 2
Case 3
5. Conclusions
Acknowledgments
References
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar]
- Schmidt, R.O. Multiple emitter location and signal parameter estimation. IEEE Trans. Antenn. Propag. 1986, 34, 276–280. [Google Scholar]
- Schell, S.V.; Calabretta, R.A.; Gardner, W.A.; Agee, B.G. Cyclic MUSIC Algorithms for Signal-Selective Direction Estimation. Proceedings of International Conference on Acoustics, Speech, and Signal Processing, Glasgow, UK, 23–26 May 1989.
- Shan, Z.; Yum, T.P. A conjugate augmented approach to direction-of-arrival estimation. IEEE Trans. Signal Process. 2005, 53, 4104–4109. [Google Scholar]
- Dogan, M.C.; Mendel, J.M. Applications of cumulants to array processing I: Aperture extension and array calibration. IEEE Trans. Signal Process. 1995, 43, 1200–1216. [Google Scholar]
- Porat, B.; Friedlander, B. Direction finding algorithms based on high-order statistics. IEEE Trans. Signal Process. 1991, 39, 2016–2024. [Google Scholar]
- Tang, J.H.; Si, X.C.; Chu, P. Improved MUSIC algorithm based on fourth-order cumulants. Syst. Eng. Electron. 2010, 32, 256–259. [Google Scholar]
- Dogan, M.C.; Mendel, J.M. Cumulant-based blind optimum beam forming. IEEE Trans. Aero. Electron. Syst. 1994, 30, 722–741. [Google Scholar]
- Wu, H.; Bao, Z. Robustness of DOA estimation in cumulant domain. Acta Electron. Sin. 1997, 25, 25–29. [Google Scholar]
- Chevalier, P.; Albera, L.; Ferreol, A.; Comon, P. On the virtual array concept for higher order array processing. IEEE Trans. Signal Process. 2005, 53, 1254–1271. [Google Scholar]
- Chevalier, P.; Ferreol, A.; Albera, L. High resolution direction finding from higher order statistics: The 2q-MUSIC algorithm. IEEE Trans. Signal Process. 2006, 54, 2986–2997. [Google Scholar]
- Chevalier, P.; Ferreol, A. On the virtual array concept for the fourth-order direction finding problem. IEEE Trans. Signal Process. 1999, 47, 2592–2595. [Google Scholar]
- Chen, Y.M.; Lee, J.H.; Yeh, C.C. Bearing estimation without calibration for randomly perturbed arrays. IEEE Trans. Signal Process. 1991, 39, 194–197. [Google Scholar]
- Kung, S.; Lo, C.; Foka, R. A Toeplitz Approximation Approach to Coherent Source Direction Finding. Proceedings of International Conference on Acoustics, Speech, and Signal Processing, Tokyo, Japan, 7–11 April 1986.
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Wang, Q.; Chen, H.; Zhao, G.; Chen, B.; Wang, P. An Improved Direction Finding Algorithm Based on Toeplitz Approximation. Sensors 2013, 13, 746-757. https://doi.org/10.3390/s130100746
Wang Q, Chen H, Zhao G, Chen B, Wang P. An Improved Direction Finding Algorithm Based on Toeplitz Approximation. Sensors. 2013; 13(1):746-757. https://doi.org/10.3390/s130100746
Chicago/Turabian StyleWang, Qing, Hua Chen, Guohuang Zhao, Bin Chen, and Pichao Wang. 2013. "An Improved Direction Finding Algorithm Based on Toeplitz Approximation" Sensors 13, no. 1: 746-757. https://doi.org/10.3390/s130100746