
Joint Resource Allocation of Spectrum Sensing and Energy Harvesting in an Energy-Harvesting-Based Cognitive Sensor Network


Abstract
:
1. Introduction
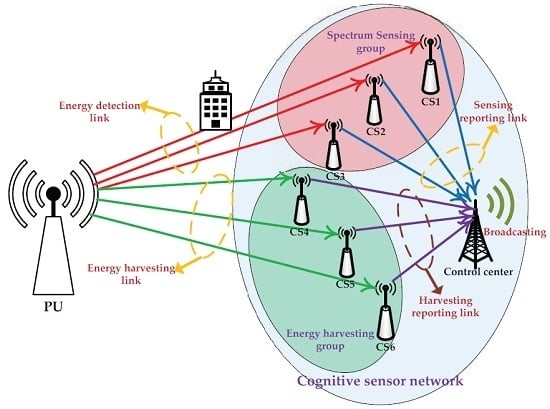
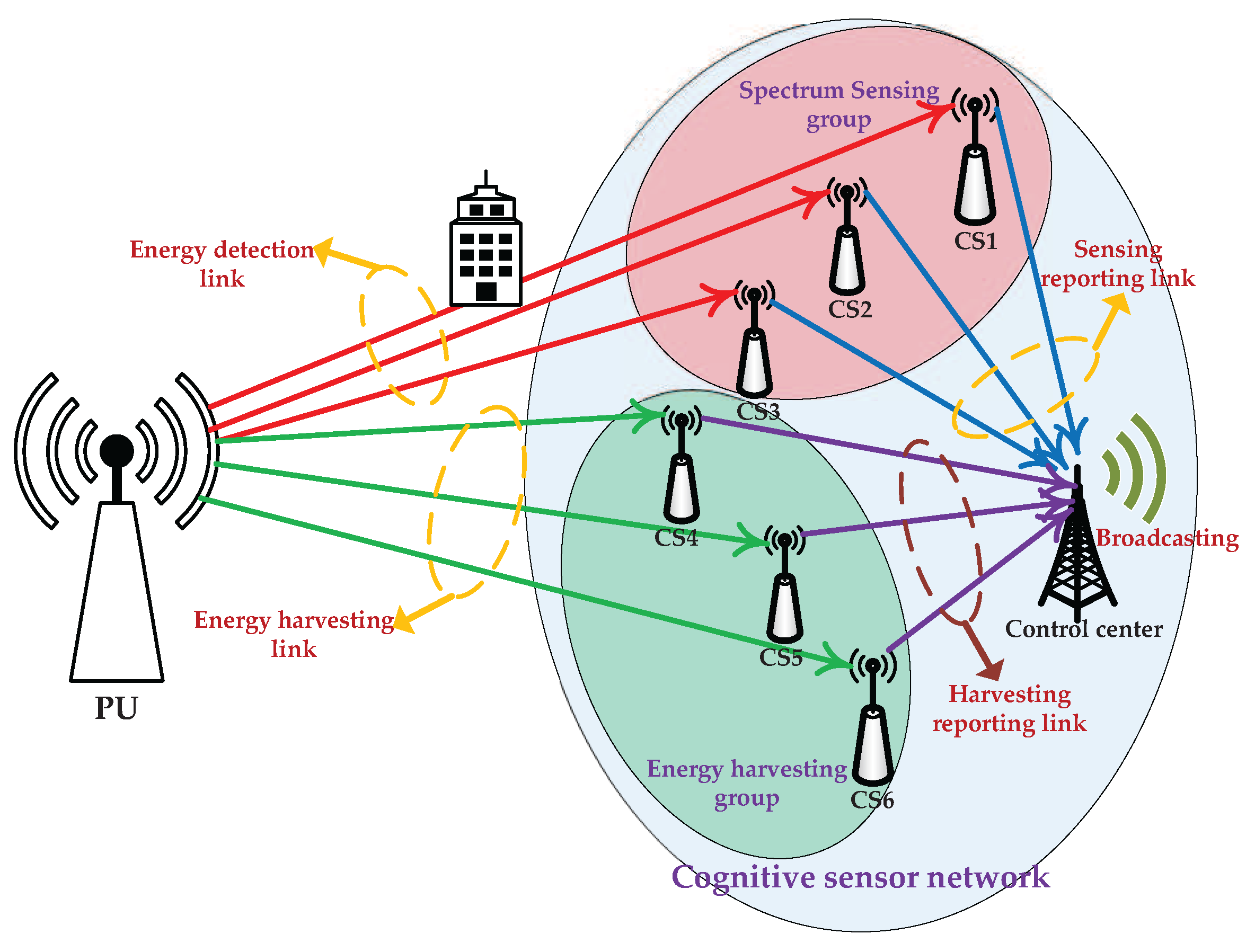
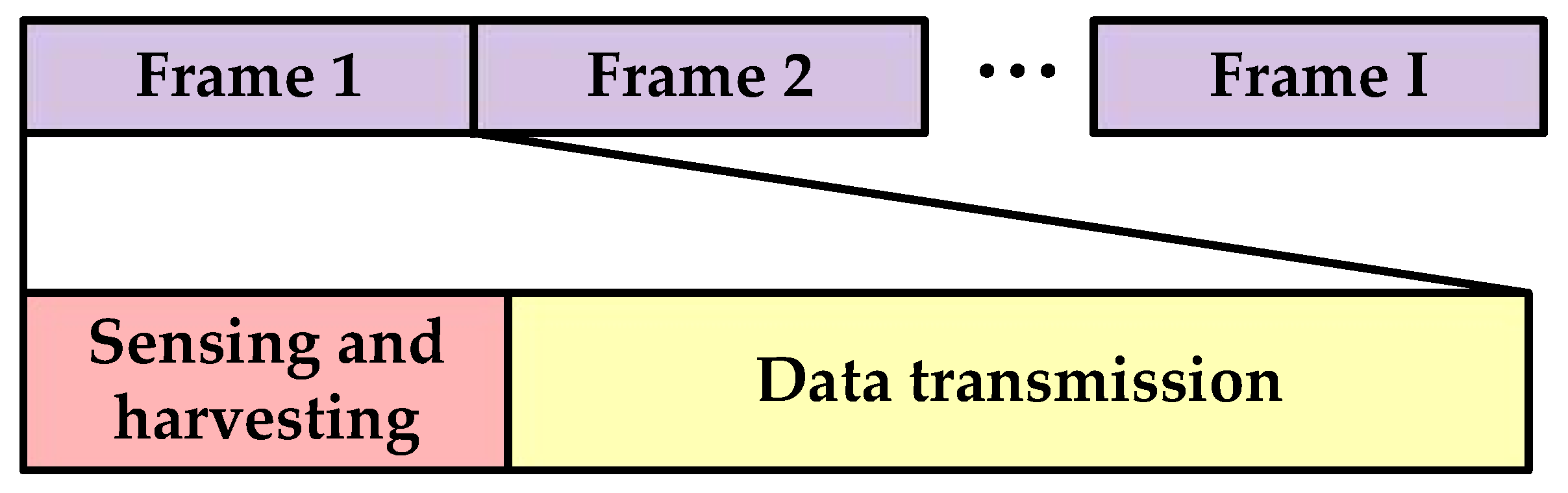
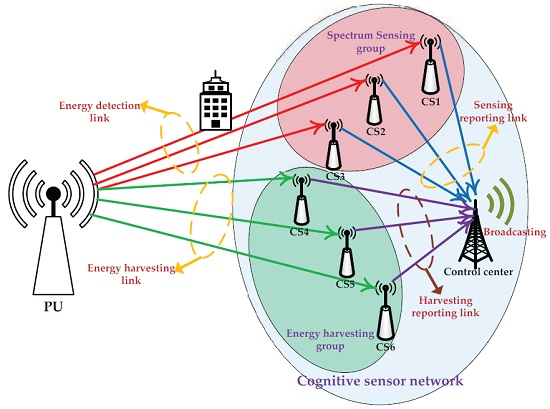
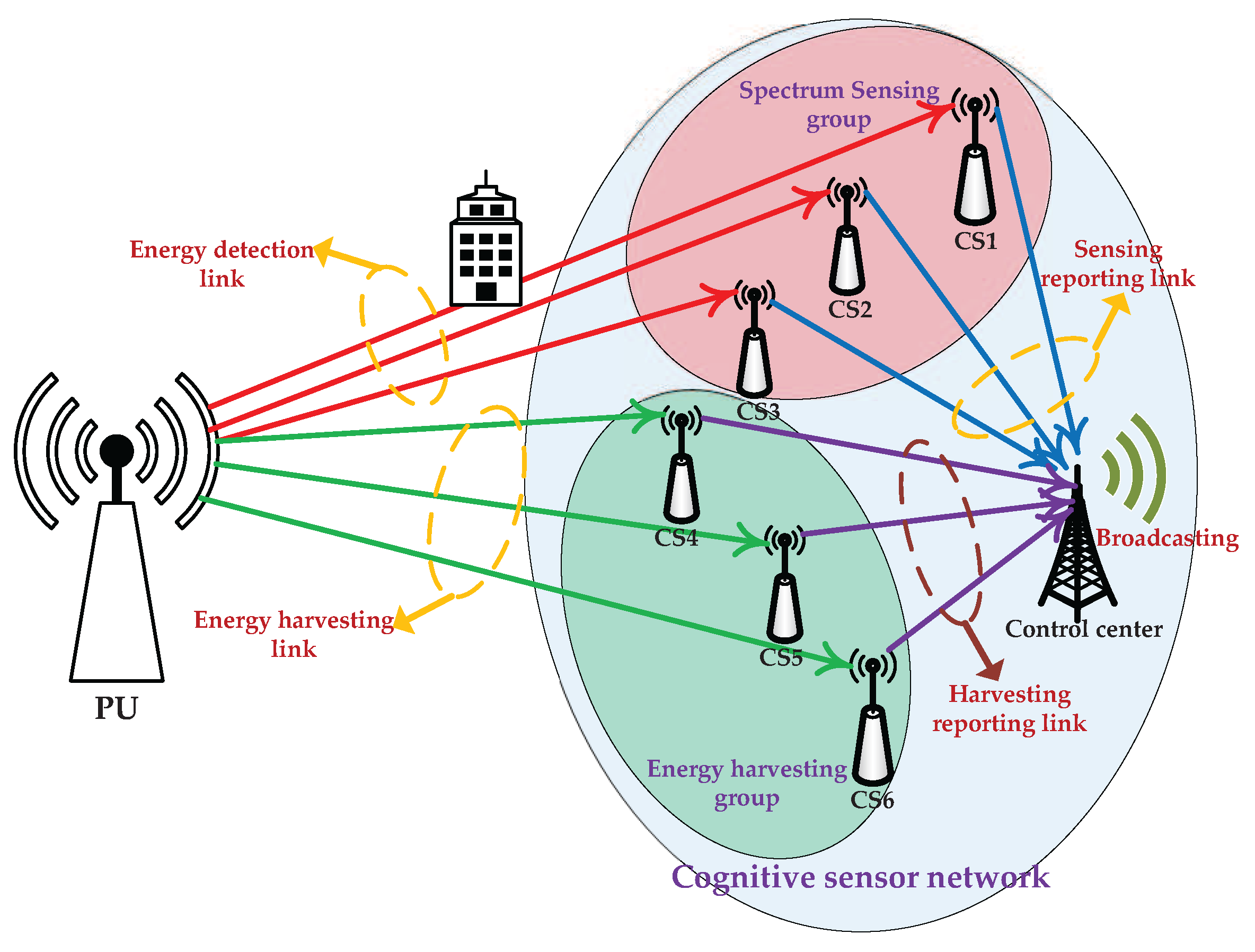
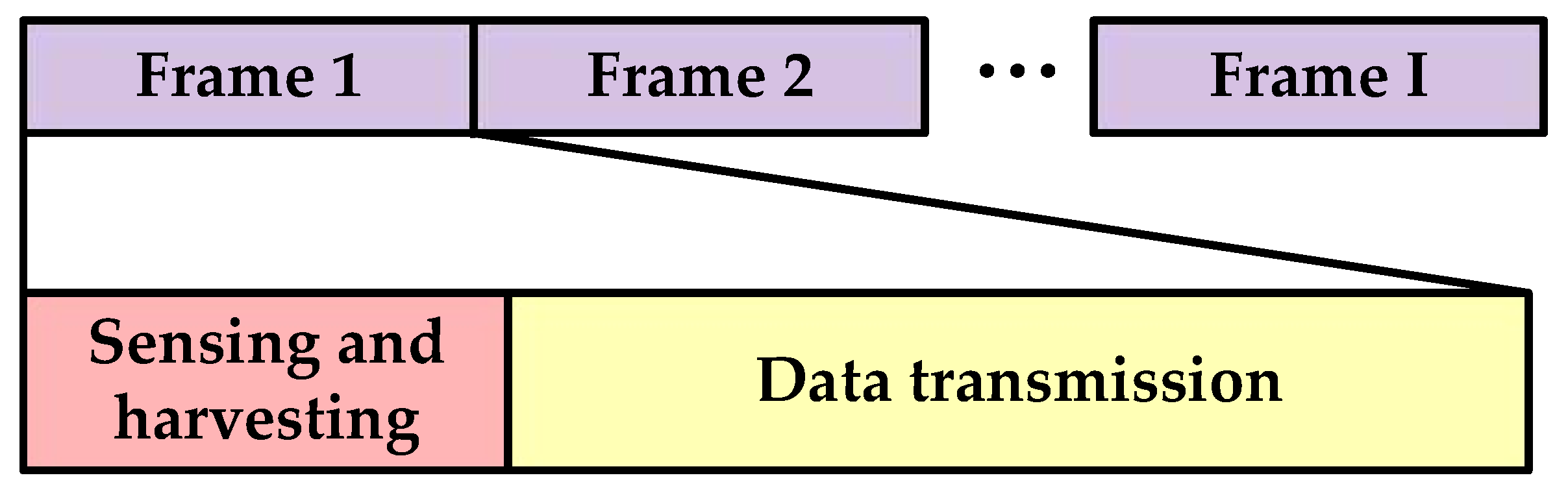
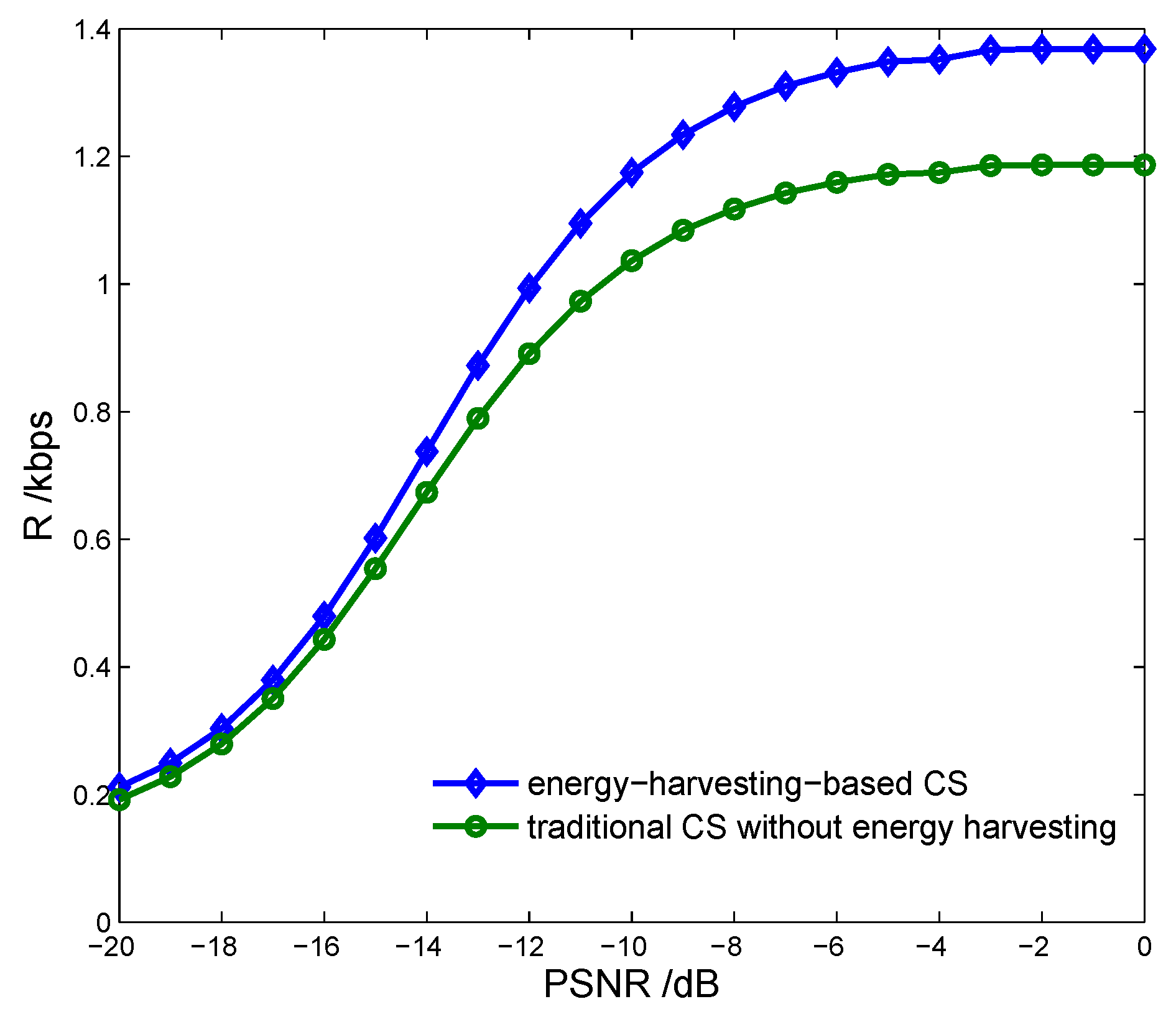
- We have investigated an energy-harvesting-based CSN model, which divides the CSs into two groups, one for sensing the PU cooperatively and the other one for harvesting the RF energy collaboratively. The harvested energy is used to increase the transmission energy of the CSN. Through considering spectrum sensing, energy harvesting and data transmission comprehensively, the transmission rate of the CS is improved while the sensing performance is guaranteed.
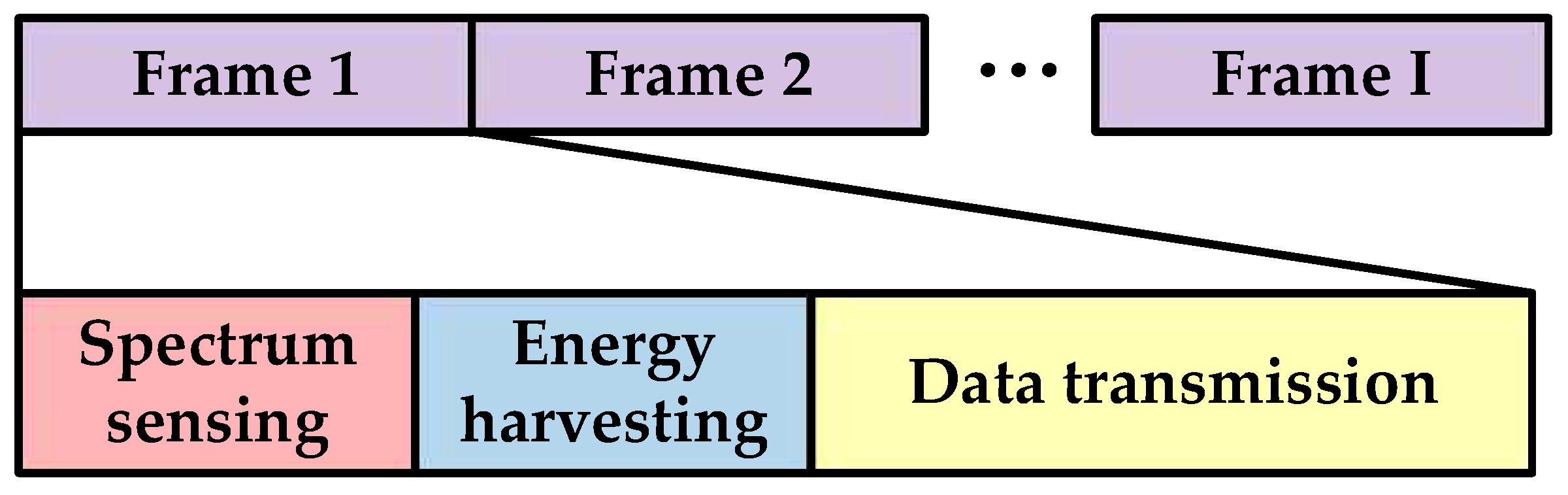
- We have investigated the joint resource optimization of sensing time, harvesting time and the numbers of sensing nodes and harvesting nodes. We have formulated the resource allocations of a single CS and CSN as two joint optimization problems, respectively. These optimization problems seek to maximize the transmission rate by obtaining a tradeoff between spectrum sensing and energy harvesting.
2. Resource Allocation in Single Cognitive Sensor
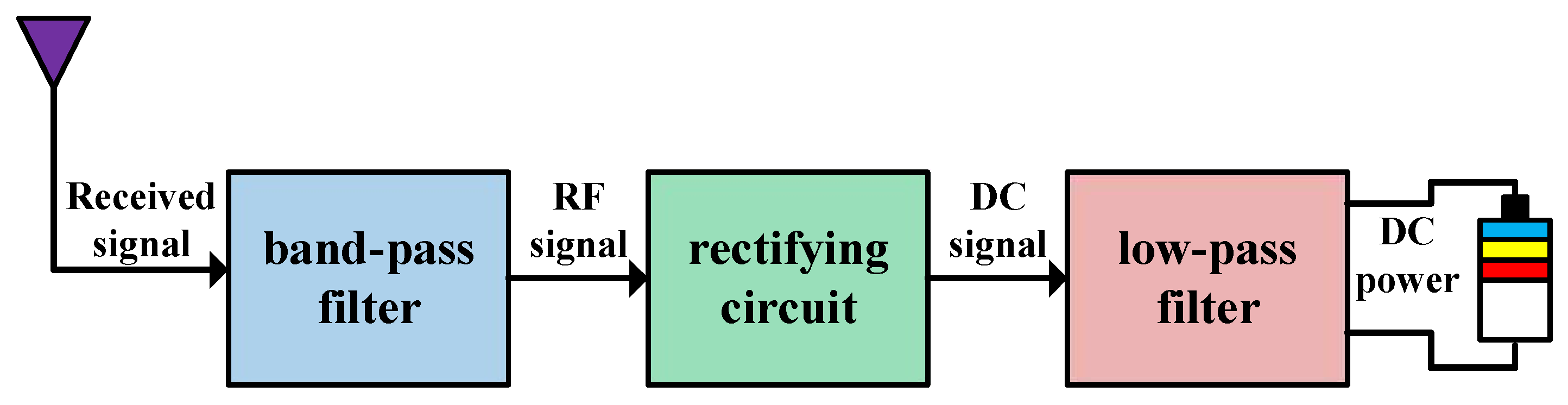
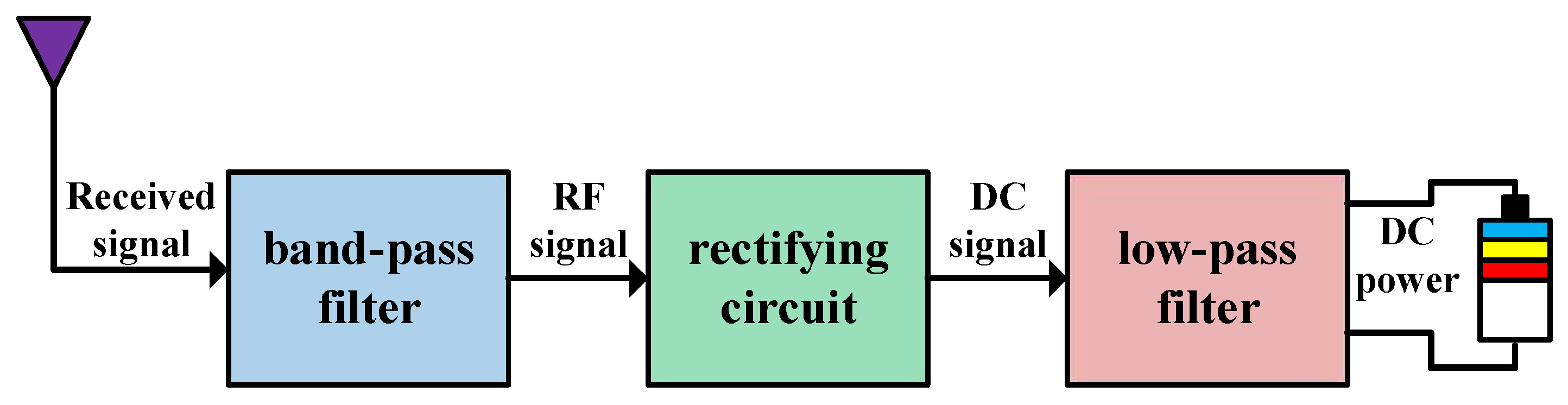
2.1. Energy-Harvesting-Based Cognitive Sensor
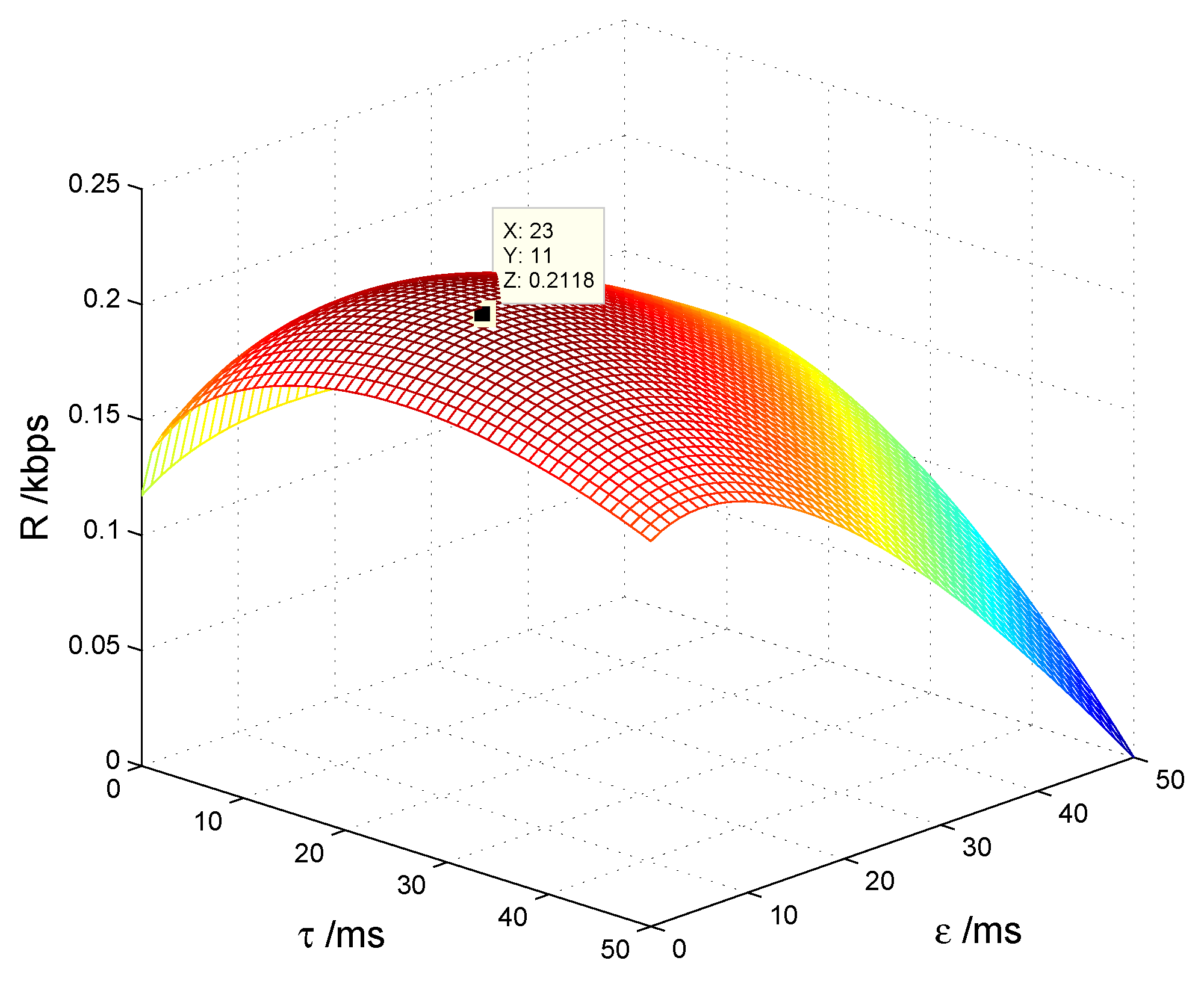
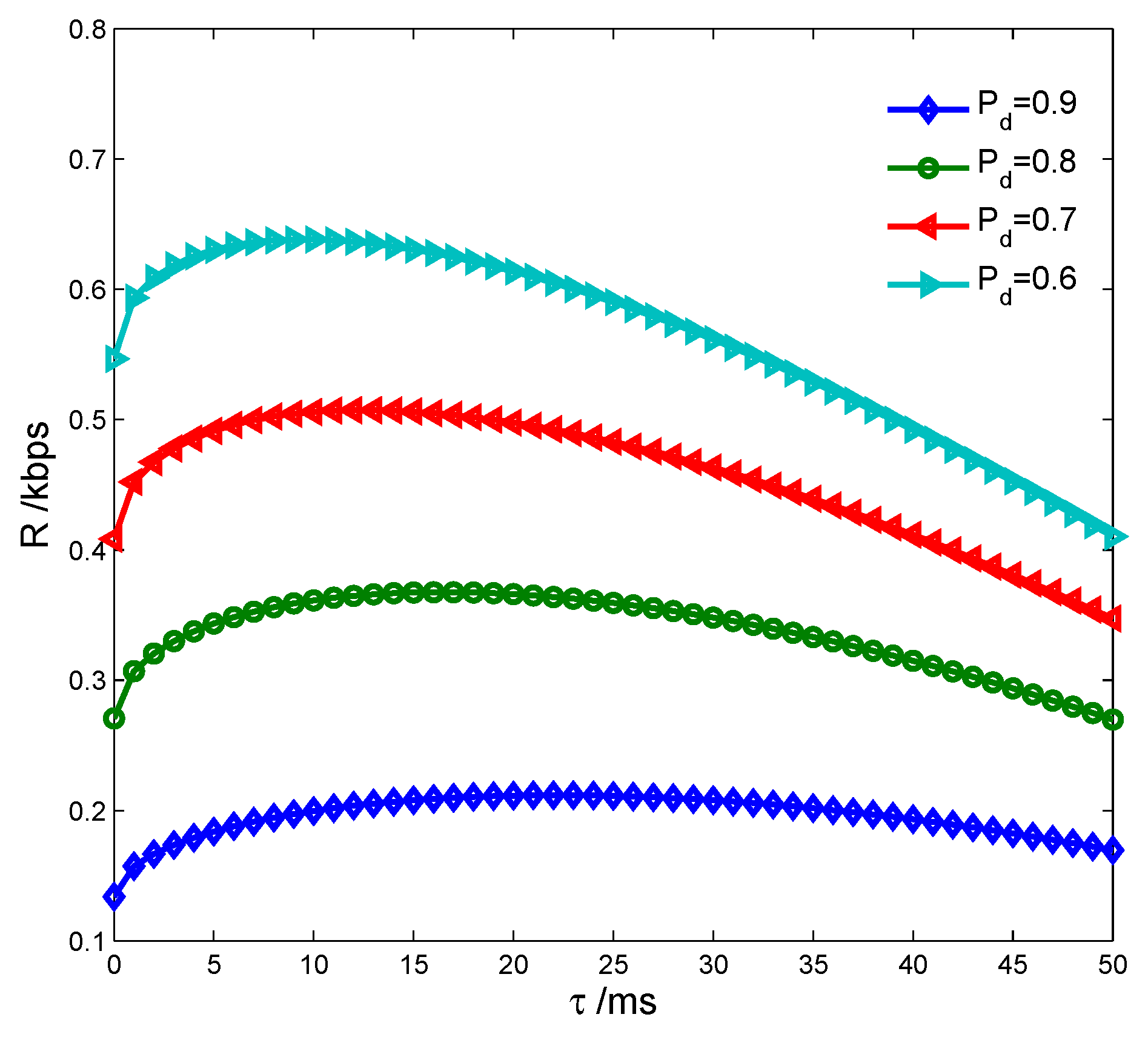
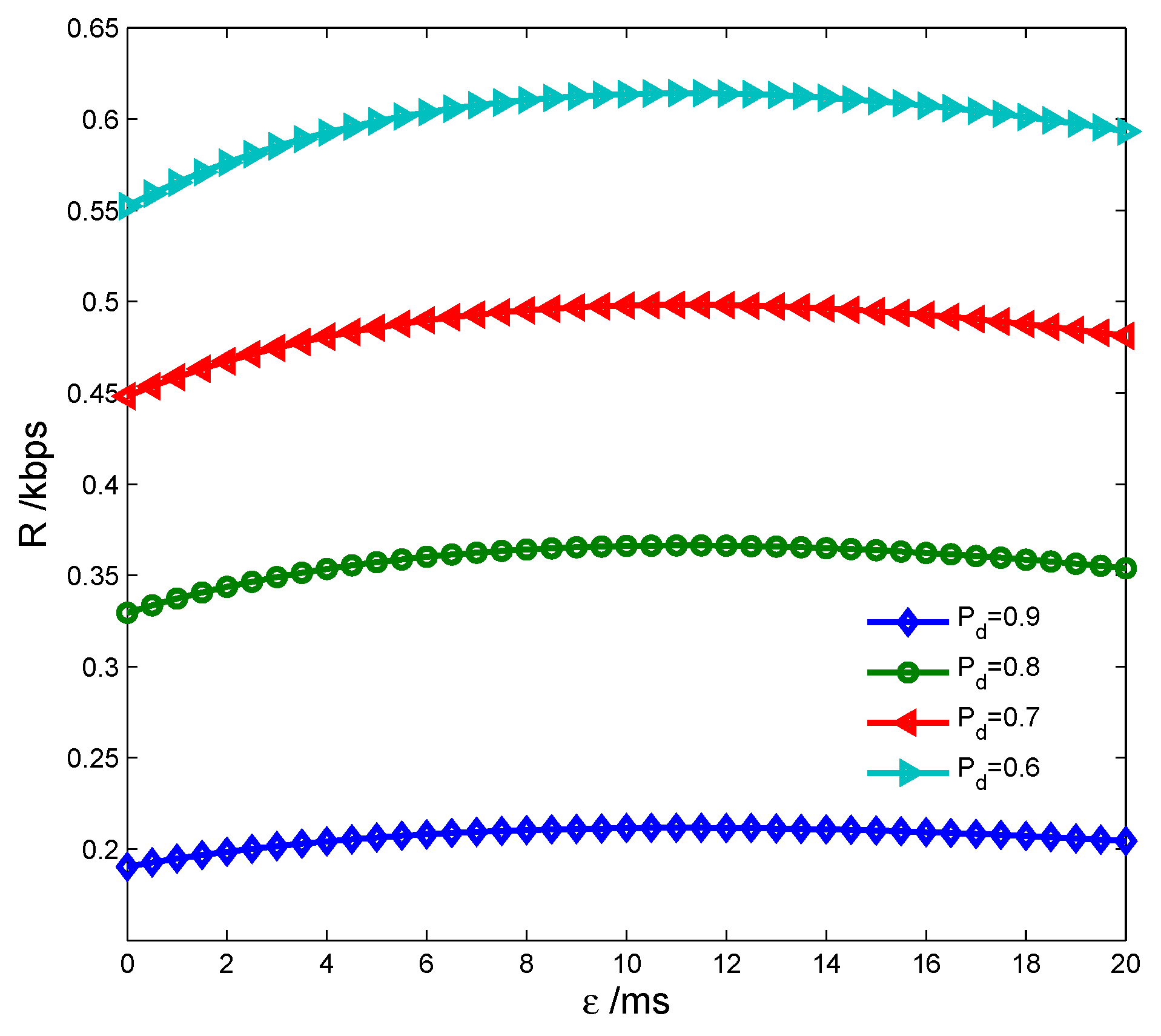
2.2. Joint Time Resource Allocation
| Algorithm 1 Half searching algorithm for |
|
| Algorithm 2 Joint optimization algorithm based on ADO |
|
3. Resource Allocation in Cooperative Cognitive Sensor Network
3.1. Energy-Harvesting-Based Cooperative Cognitive Sensor Network
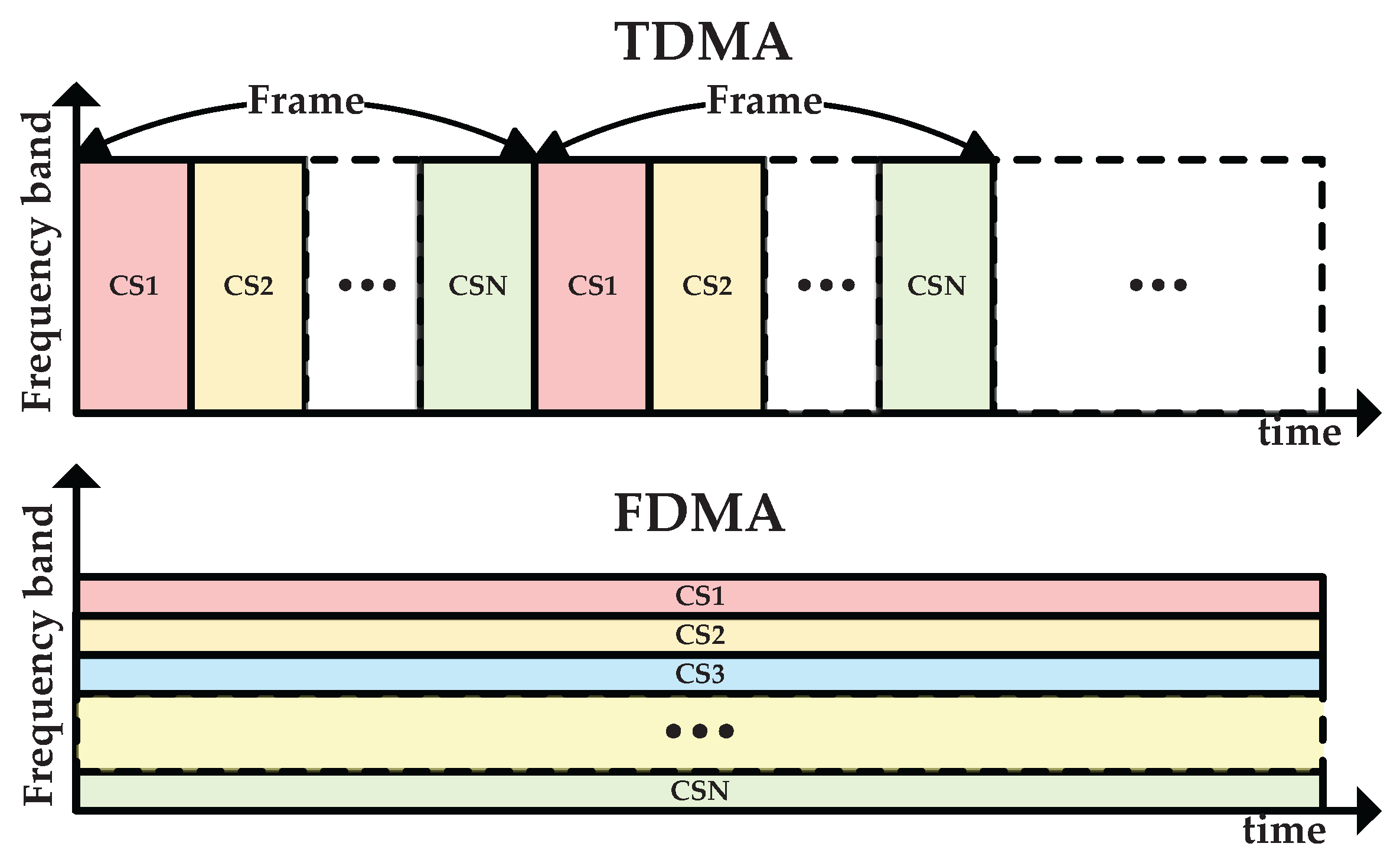
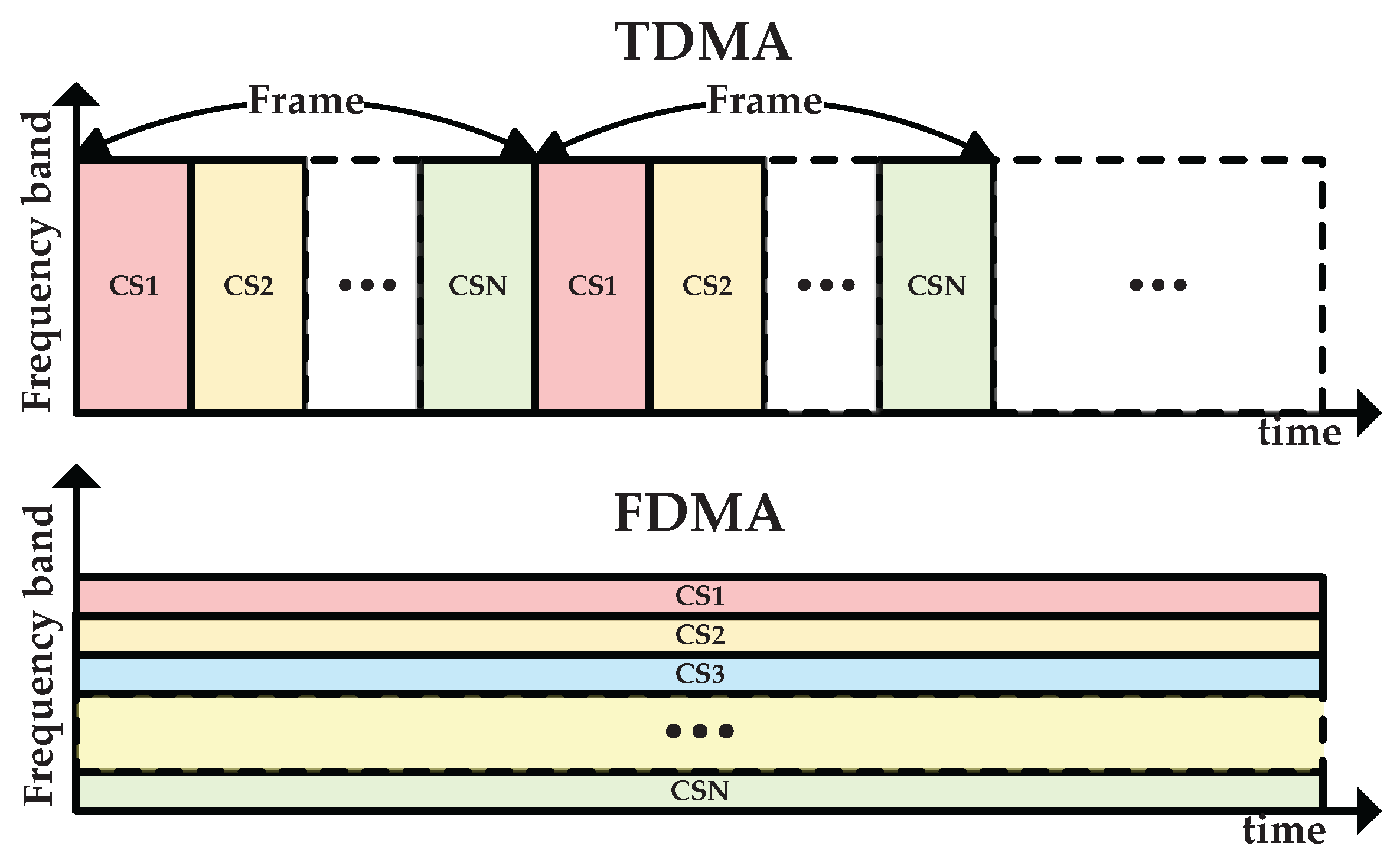
3.2. Joint Time-And-Node Resource Allocation
4. Simulations and Discussions
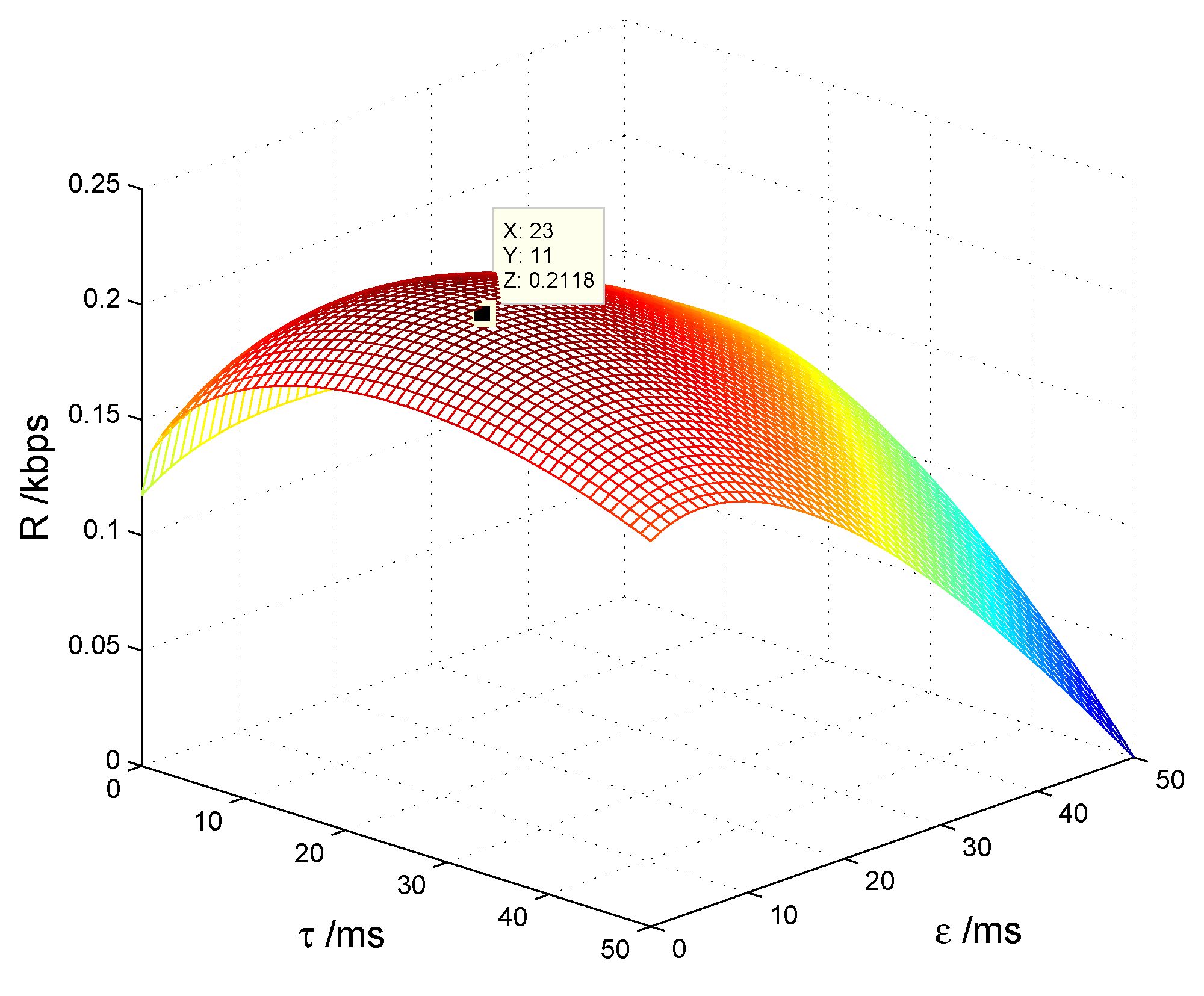
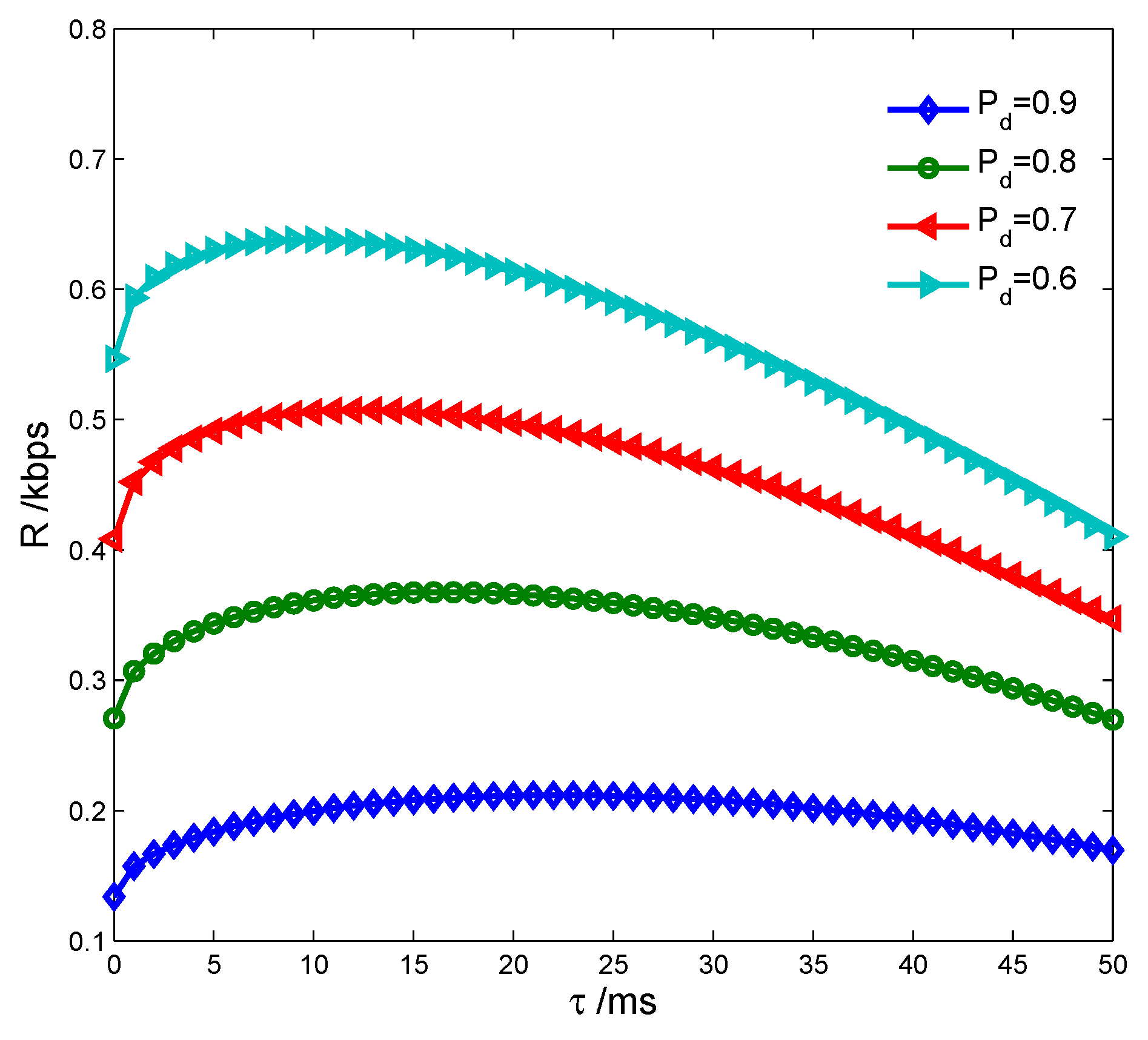
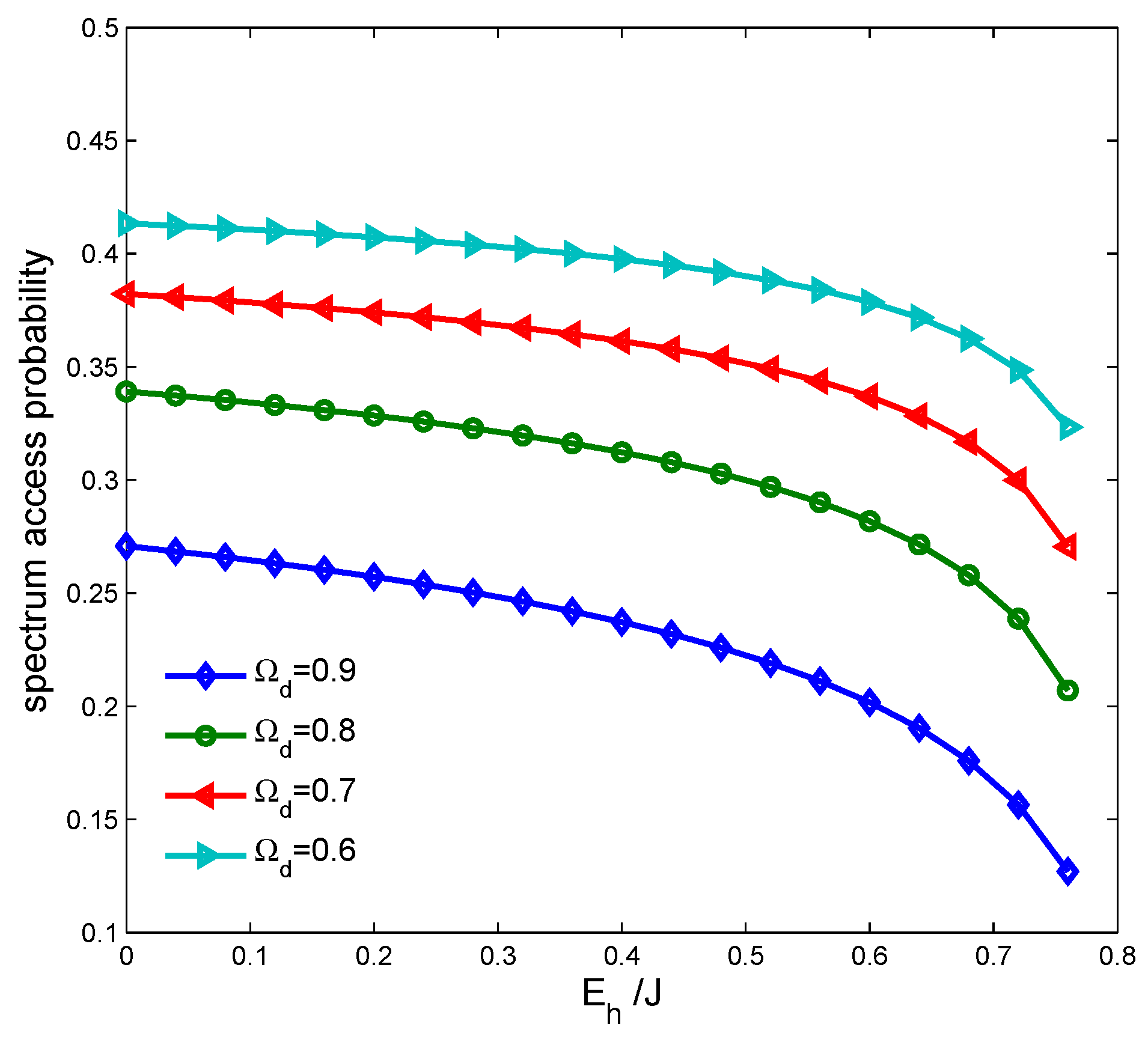
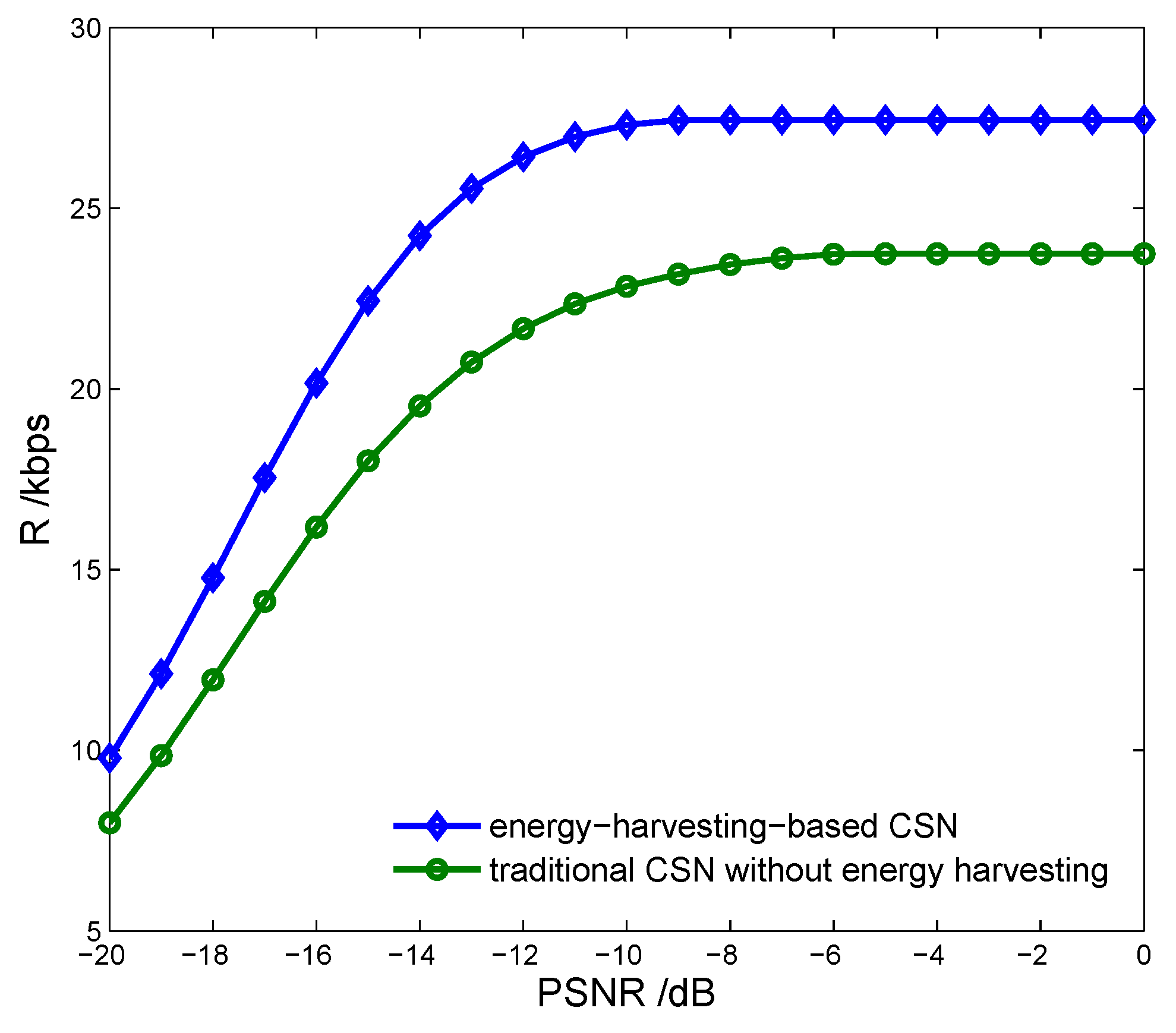
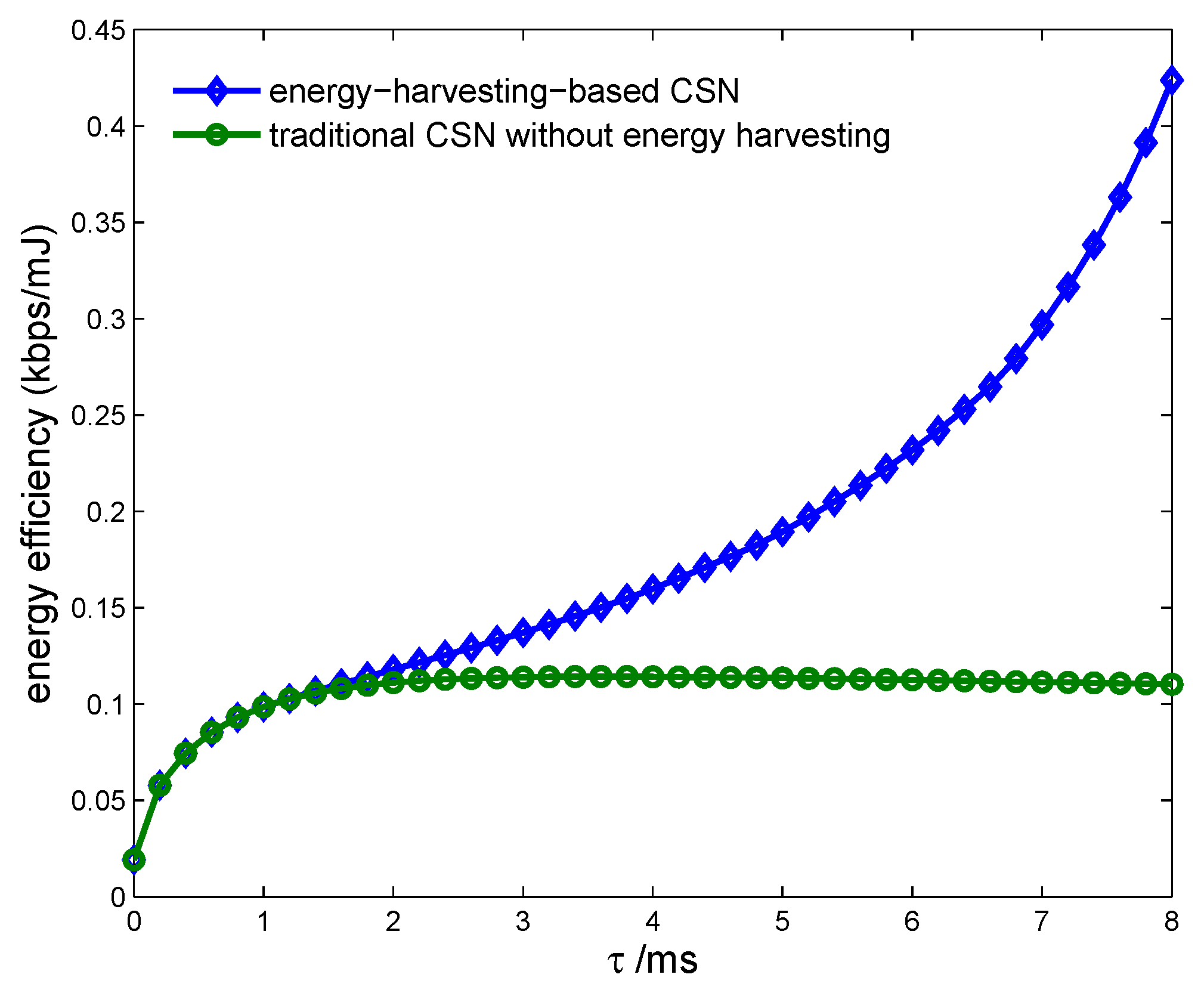
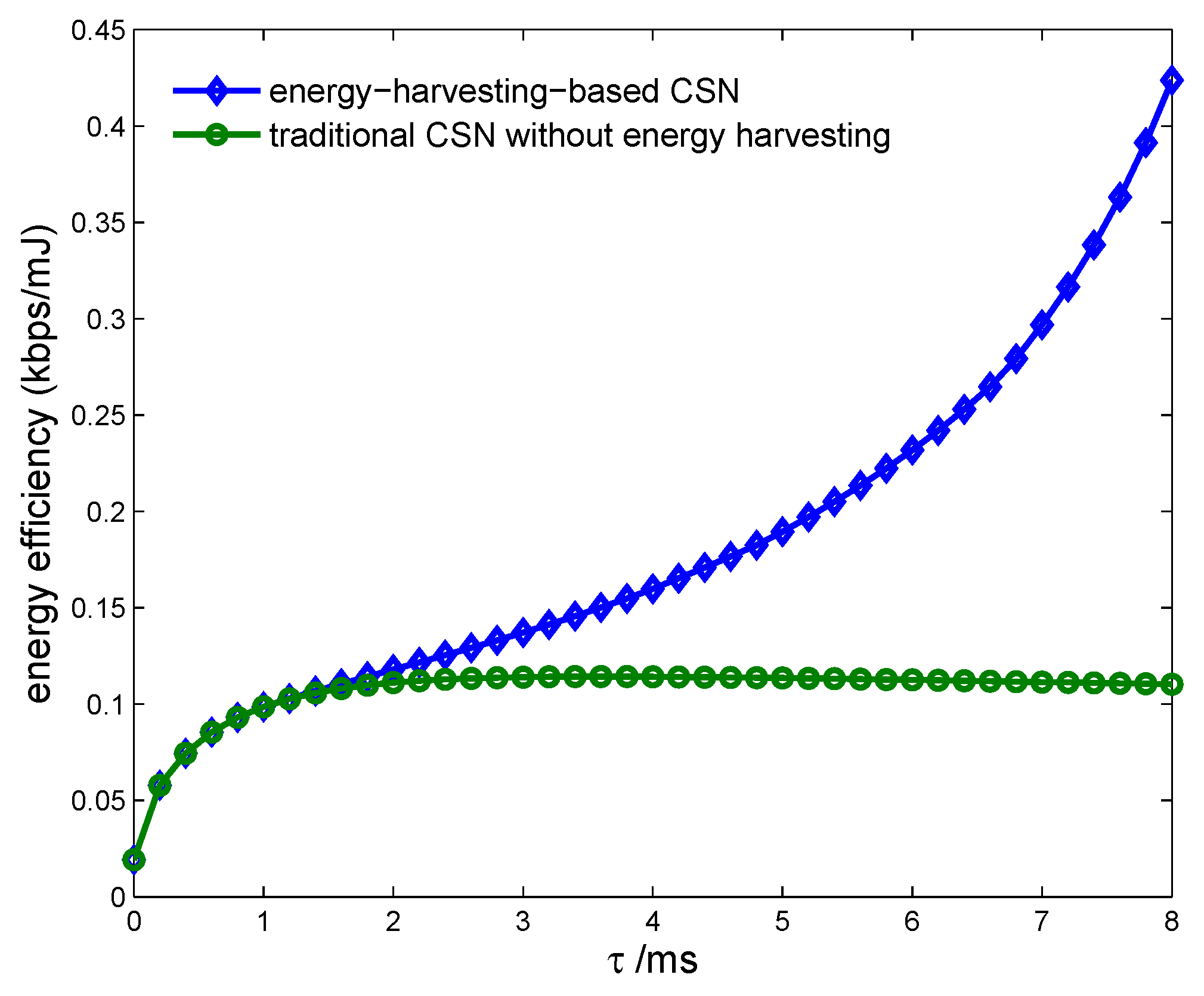
4.1. Single Cognitive Sensor Case
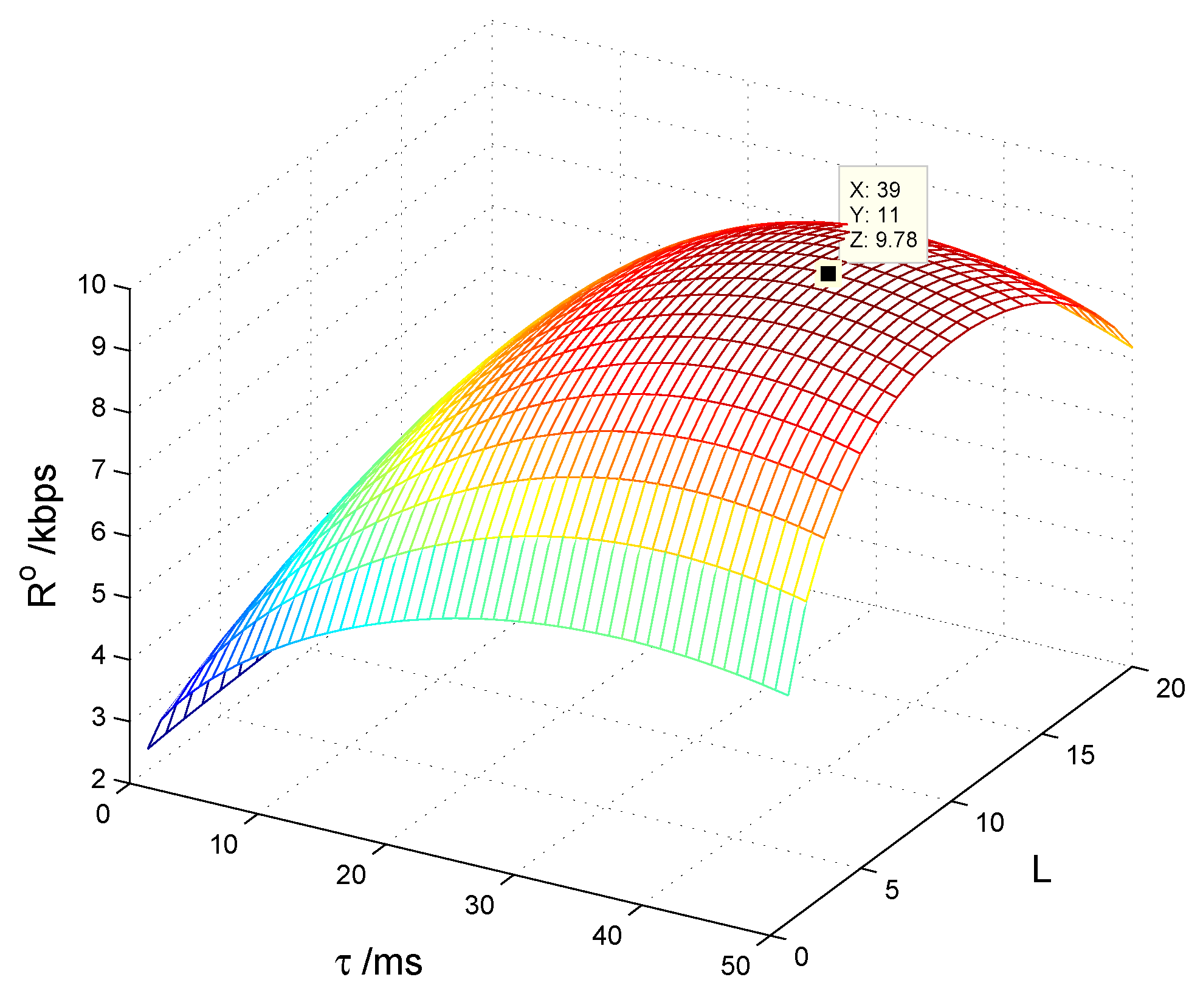
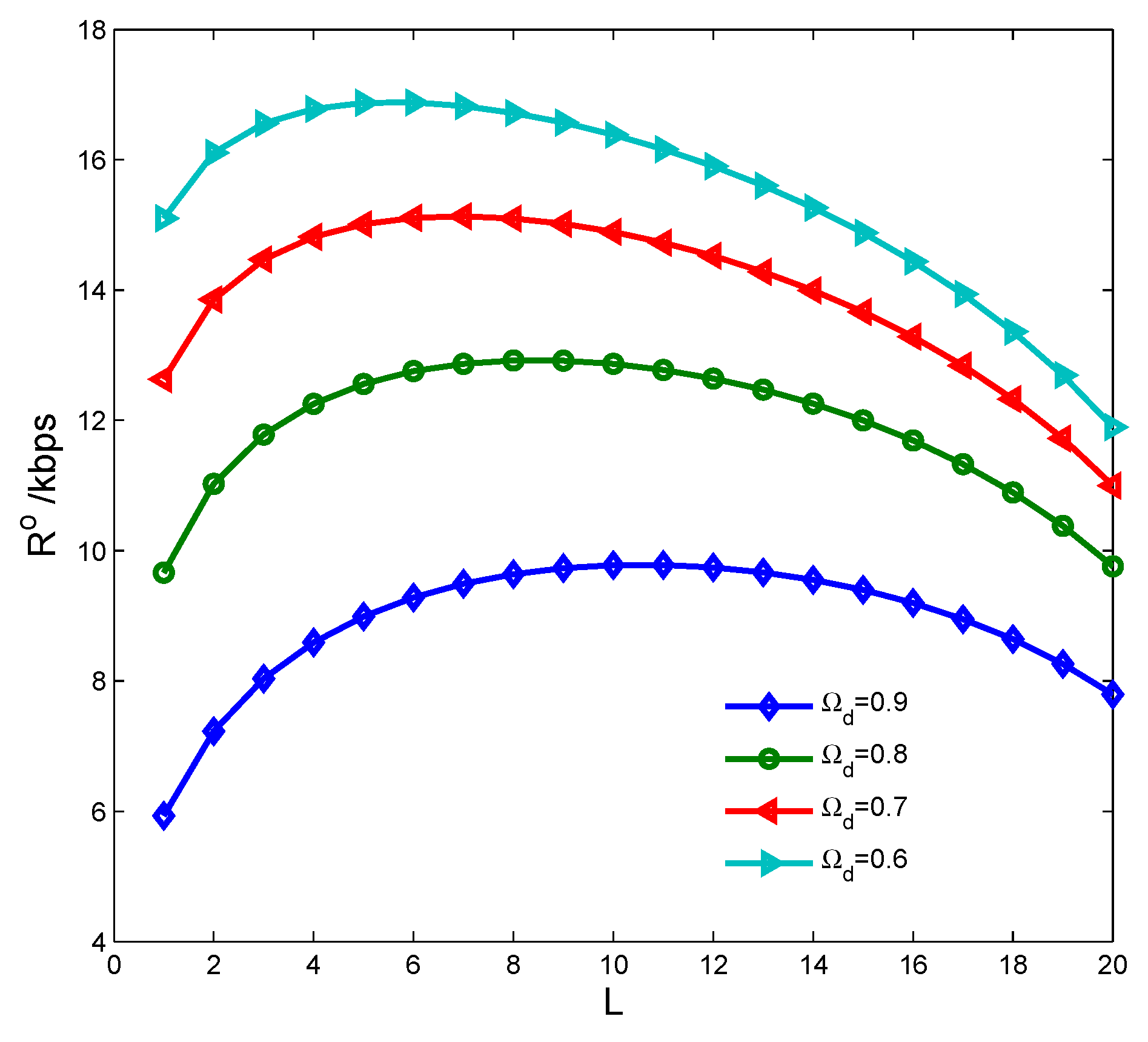
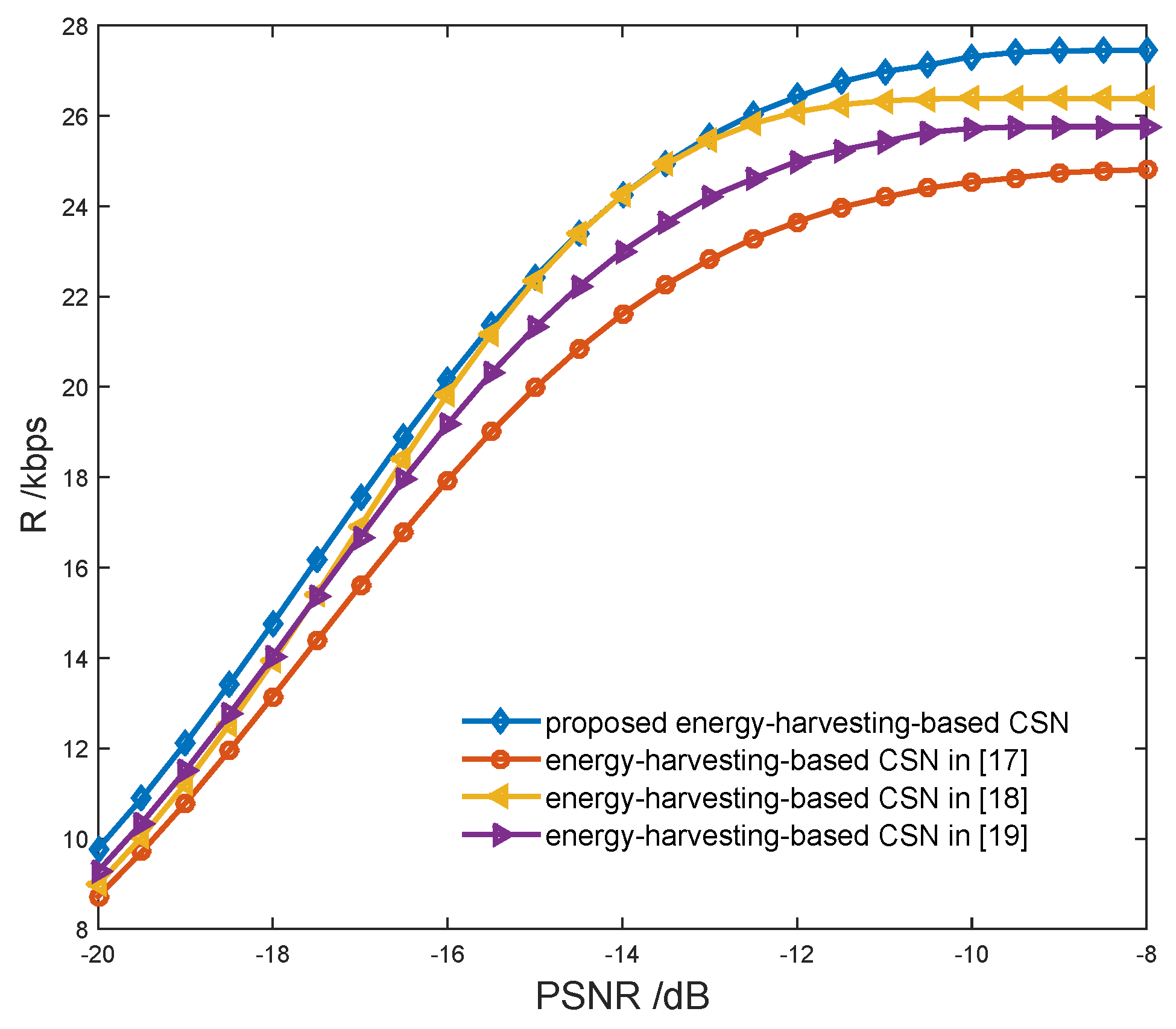
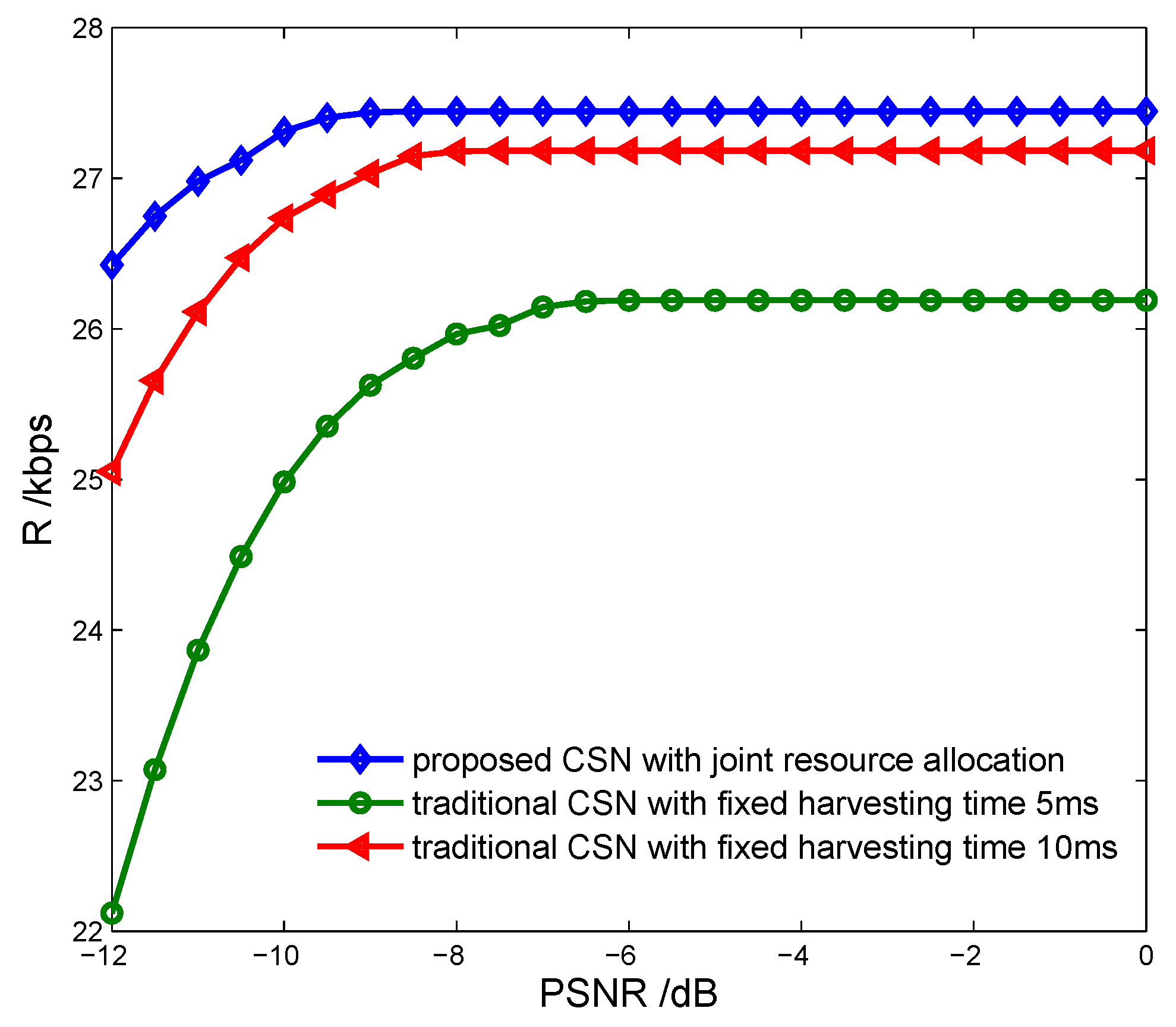
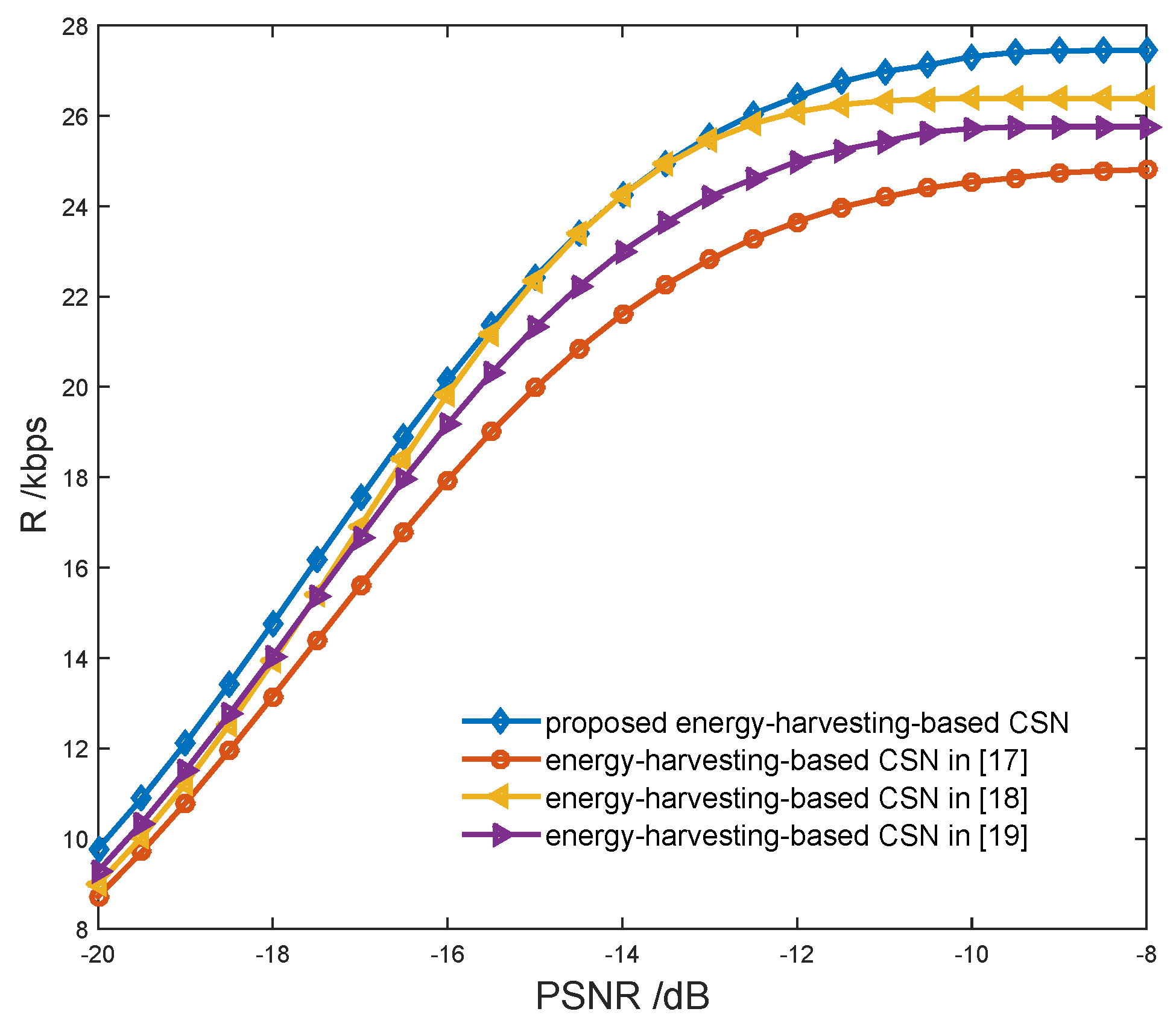
4.2. Cognitive Sensor Network Case
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| CS | Cognitive Sensor |
| CSN | Cognitive Sensor Network |
| PU | Primary User |
| PSNR | PU signal to noise ratio |
| ADO | Alternating direction optimization |
References
- Najimi, M.; Ebrahimzadeh, A.; Andargoli, S.M.H.; Fallahi, A. Lifetime maximization in cognitive sensor networks based on the node selection. IEEE Sens. J. 2014, 14, 2376–2383. [Google Scholar] [CrossRef]
- Maleki, S.; Pandharipande, A.; Leus, G. Energy-efficient distributed spectrum sensing for cognitive sensor networks. IEEE Sens. J. 2011, 11, 565–573. [Google Scholar] [CrossRef]
- Liu, X.; Tan, X. Optimization algorithm of periodical cooperative spectrum sensing in cognitive radio. Int. J. Commun. Syst. 2014, 27, 705–720. [Google Scholar] [CrossRef]
- Sun, H.; Nallanathan, A.; Wang, C.; Chen, Y. Wideband spectrum sensing for cognitive radio networks: A survey. IEEE Wirel. Commun. 2013, 20, 74–81. [Google Scholar]
- Liu, X.; Bi, G.; Jia, M.; Guan, Y.L.; Zhong, W.; Lin, R. Joint optimization of sensing threshold and transmission power in wideband cognitive radio. Radio Sci. 2013, 48, 359–370. [Google Scholar]
- Shen, J.; Liu, S.; Wang, Y. Robust Energy Detection in Cognitive Radio. IET Commun. 2009, 3, 1016–1023. [Google Scholar] [CrossRef]
- Alhennawi, H.R.; Ismail, M.H.; Mourad, H.A.M. Performance evaluation of energy detection over extended generalised-K composite fading channels. Electron. Lett. 2014, 50, 1643–1645. [Google Scholar] [CrossRef]
- Hamza, D.; Aissa, S.; Aniba, G. Equal Gain Combining for Cooperative Spectrum Sensing in Cognitive Radio Networks. IEEE Trans. Wirel. Commun. 2014, 13, 4334–4345. [Google Scholar] [CrossRef]
- Liu, X.; Jia, M.; Gu, X.; Tan, X. Optimal periodic cooperative spectrum sensing based on weight fusion in cognitive radio networks. Sensors 2013, 13, 5251–5272. [Google Scholar] [CrossRef] [PubMed]
- Liang, Y.C.; Zeng, Y.H.; Peh, E.C.Y. Sensing-throughput Tradeoff for Cognitive Radio Networks. IEEE Trans. Wirel. Commun. 2008, 7, 1326–1336. [Google Scholar] [CrossRef]
- Valenta, C.R.; Durgin, G.D. Harvesting wireless power: Survey of energy-harvester conversion efficiency in farfield, wireless power transfer systems. IEEE Microw. Mag. 2014, 15, 108–120. [Google Scholar]
- Park, S.; Kim, H.; Hong, D. Cognitive Radio Networks with Energy Harvesting. IEEE Trans. Wirel. Commun. 2013, 12, 1386–1397. [Google Scholar] [CrossRef]
- Mekikis, P.V.; Antonopoulos, A.; Kartsakli, E.; Lalos, A.S.; Alonso, L.; Verikoukis, C. Information Exchange in Randomly Deployed Dense WSNs With Wireless Energy Harvesting Capabilities. IEEE Trans. Wirel. Commun. 2016, 15, 3008–3018. [Google Scholar] [CrossRef]
- Esteves, V.; Antonopoulos, A.; Kartsakli, E.; Puig-Vidal, M.; Miribel-Catala, P.; Verikoukis, C. Cooperative Energy Harvesting-Adaptive MAC Protocol for WBANs. Sensors 2015, 15, 12635–12650. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mekikis, P.V.; Lalos, A.S.; Antonopoulos, A.; Alonso, L.; Verikoukis, C. Wireless Energy Harvesting in Two-Way Network Coded Cooperative Communications: A Stochastic Approach for Large Scale Networks. IEEE Commun. Lett. 2014, 18, 1011–1014. [Google Scholar] [CrossRef]
- Zhao, N.; Yu, F.R.; Leung, V.C.M. Wireless energy harvesting in interference alignment networks. IEEE Commun. Mag. 2015, 53, 72–78. [Google Scholar] [CrossRef]
- Liu, X.; Na, Z.; Jia, M.; Gu, X.; Li, X. Multislot simultaneous spectrum sensing and Energy harvesting in cognitive radio. Energies 2016, 9, 568. [Google Scholar] [CrossRef]
- Liu, X. A novel wireless power transfer-based weighed clustering cooperative spectrum sensing method for cognitive sensor networks. Sensors 2015, 15, 27760–27782. [Google Scholar] [CrossRef] [PubMed]
- Zhang, D.; Chen, Z.; Ren, J.; Zhang, N.; Awad, M.K.; Zhou, H.; Shen, X.S. Energy-harvesting-aided spectrum sensing and data transmission in heterogeneous cognitive radio sensor network. IEEE Trans. Veh. Technol. 2017, 66, 831–843. [Google Scholar] [CrossRef]
- Stevenson, C.R.; Chouinard, G.; Lei, Z.; Hu, W.; Shellhammer, S.J.; Caldwell, W. IEEE 802.22: The first cognitive radio wireless regional area network standard. IEEE Commun. Mag. 2009, 47, 130–138. [Google Scholar] [CrossRef]
- Liu, X.; Jia, M.; Tan, X. Threshold optimization of cooperative spectrum sensing in cognitive radio network. Radio Sci. 2013, 48, 23–32. [Google Scholar] [CrossRef]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed optimization and statistical learning via the alternating direction method of multipliers. Found. Trends Mach. Learn. 2011, 3, 1–122. [Google Scholar] [CrossRef]
- Singh, J.S.P.; Rai, M.K.; Singh, J. Trade-off between AND and OR detection method for cooperative sensing in cognitive radio. In Proceedings of the IEEE International Advance Computing Conference, Gurgaon, India, 21–22 February 2014; pp. 395–399.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Frame duration T | 100 ms |
| Sampling frequency | 100 kHz |
| Absence probability of PU | 0.5 |
| Presence probability of PU | 0.5 |
| Transmission power of CS | 1 mW |
| Noise power | mW |
| Transmission power of PU | 3 W |
| Energy harvesting efficiency μ | 0.6 |
| Number of CSs N | 20 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Lu, W.; Ye, L.; Li, F.; Zou, D. Joint Resource Allocation of Spectrum Sensing and Energy Harvesting in an Energy-Harvesting-Based Cognitive Sensor Network. Sensors 2017, 17, 600. https://doi.org/10.3390/s17030600
Liu X, Lu W, Ye L, Li F, Zou D. Joint Resource Allocation of Spectrum Sensing and Energy Harvesting in an Energy-Harvesting-Based Cognitive Sensor Network. Sensors. 2017; 17(3):600. https://doi.org/10.3390/s17030600
Chicago/Turabian StyleLiu, Xin, Weidang Lu, Liang Ye, Feng Li, and Deyue Zou. 2017. "Joint Resource Allocation of Spectrum Sensing and Energy Harvesting in an Energy-Harvesting-Based Cognitive Sensor Network" Sensors 17, no. 3: 600. https://doi.org/10.3390/s17030600