
Modeling of a Photovoltaic-Powered Electric Vehicle Charging Station with Vehicle-to-Grid Implementation



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
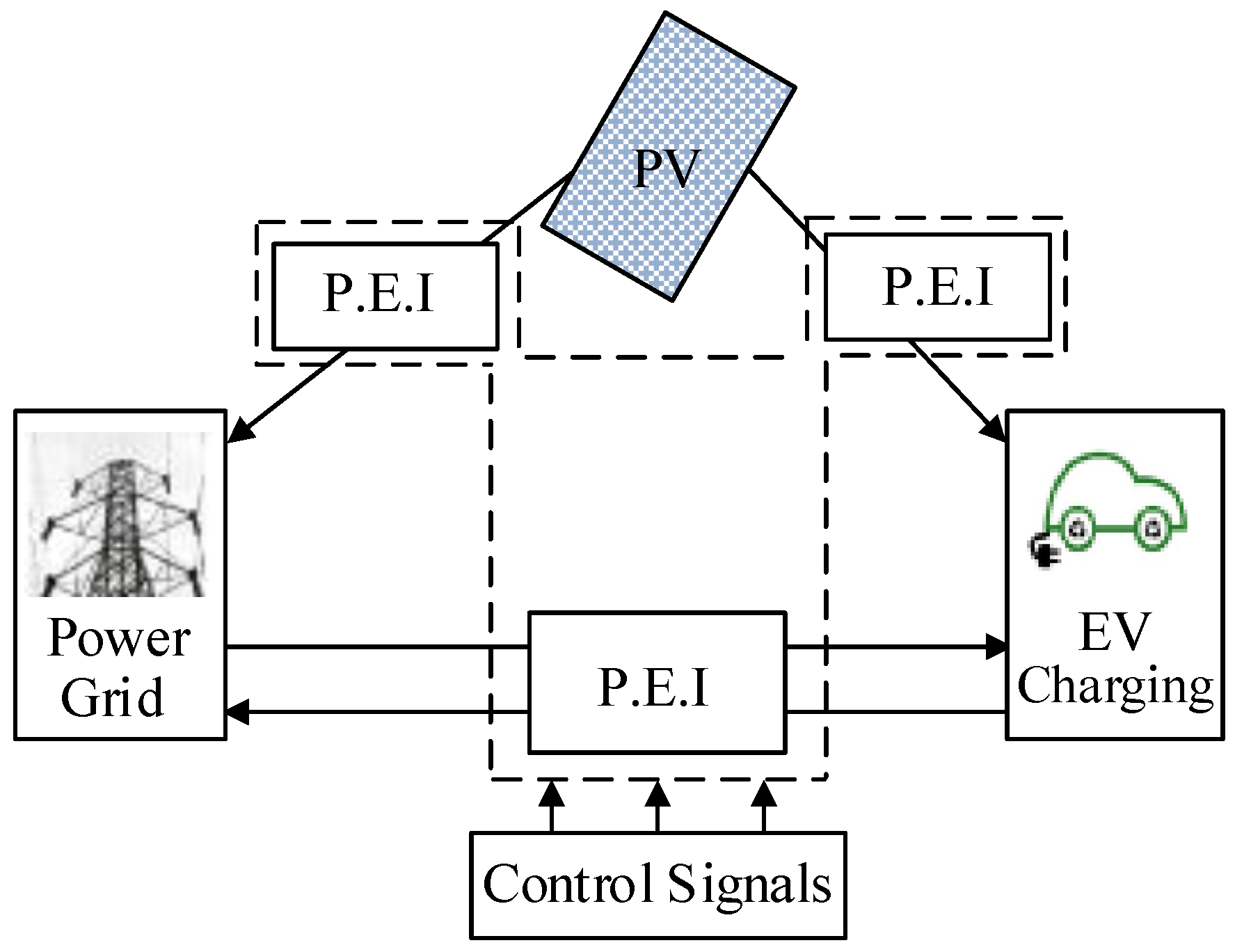
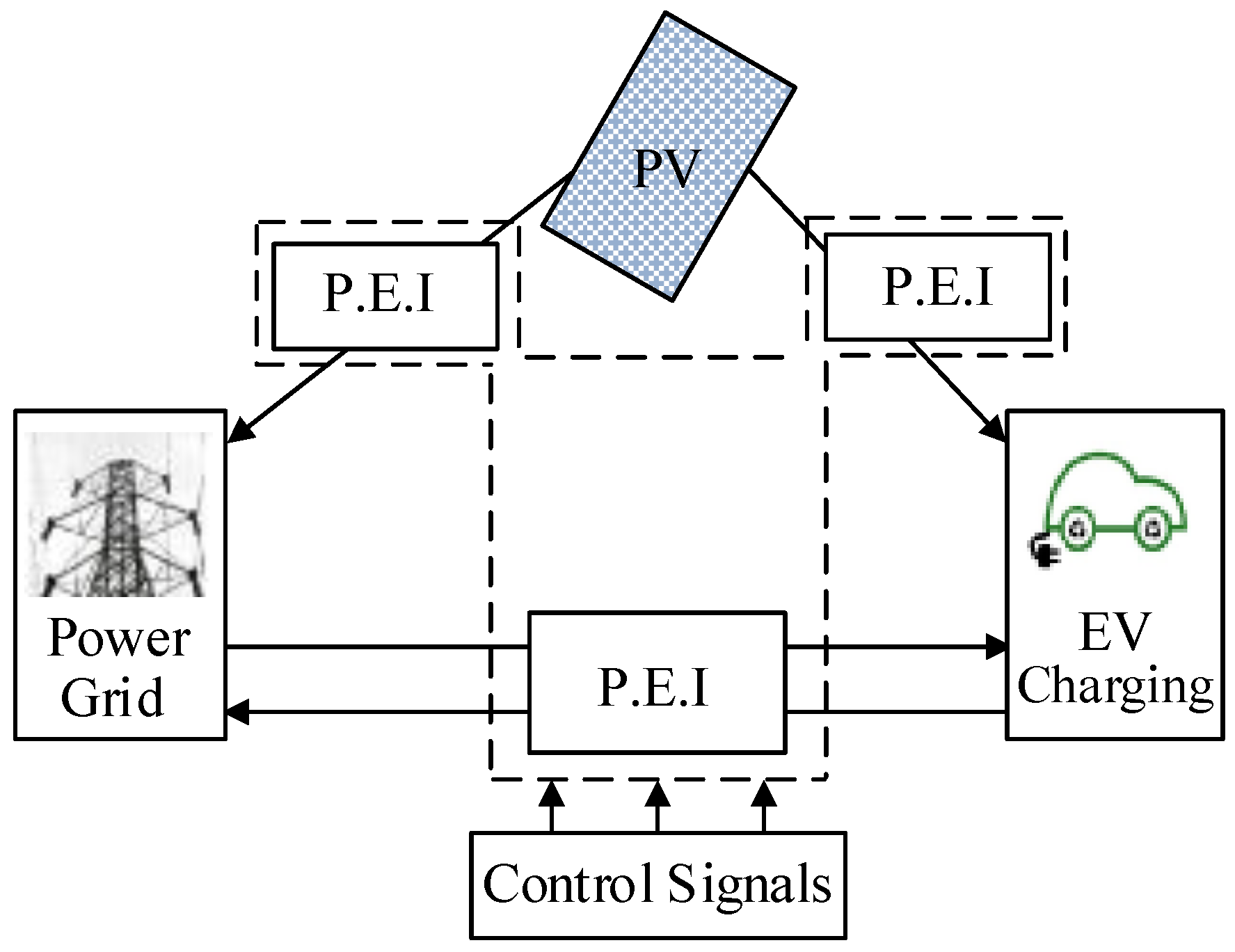
2. Smart Charging Station Architecture
2.1. Modes of Operation of the Charging Station
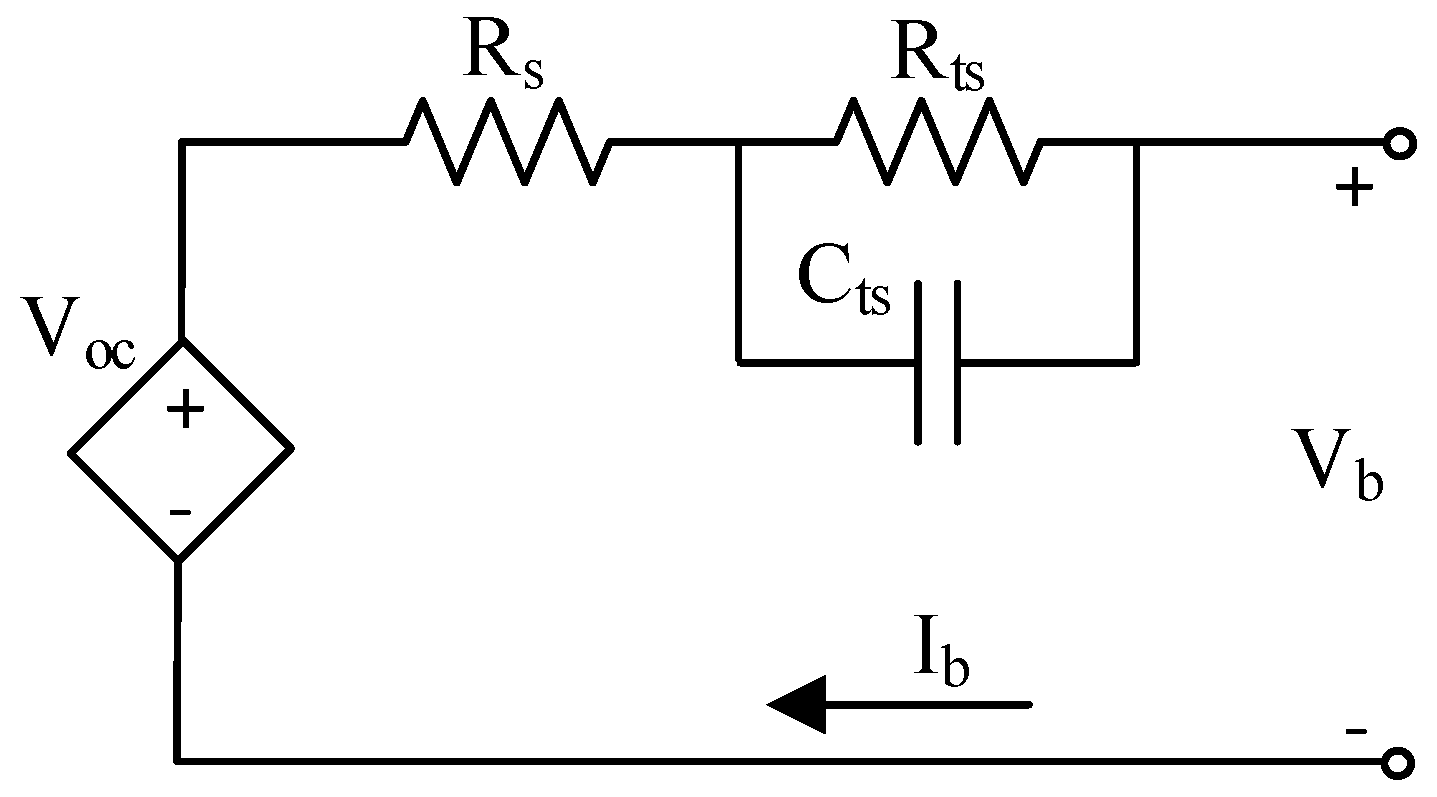
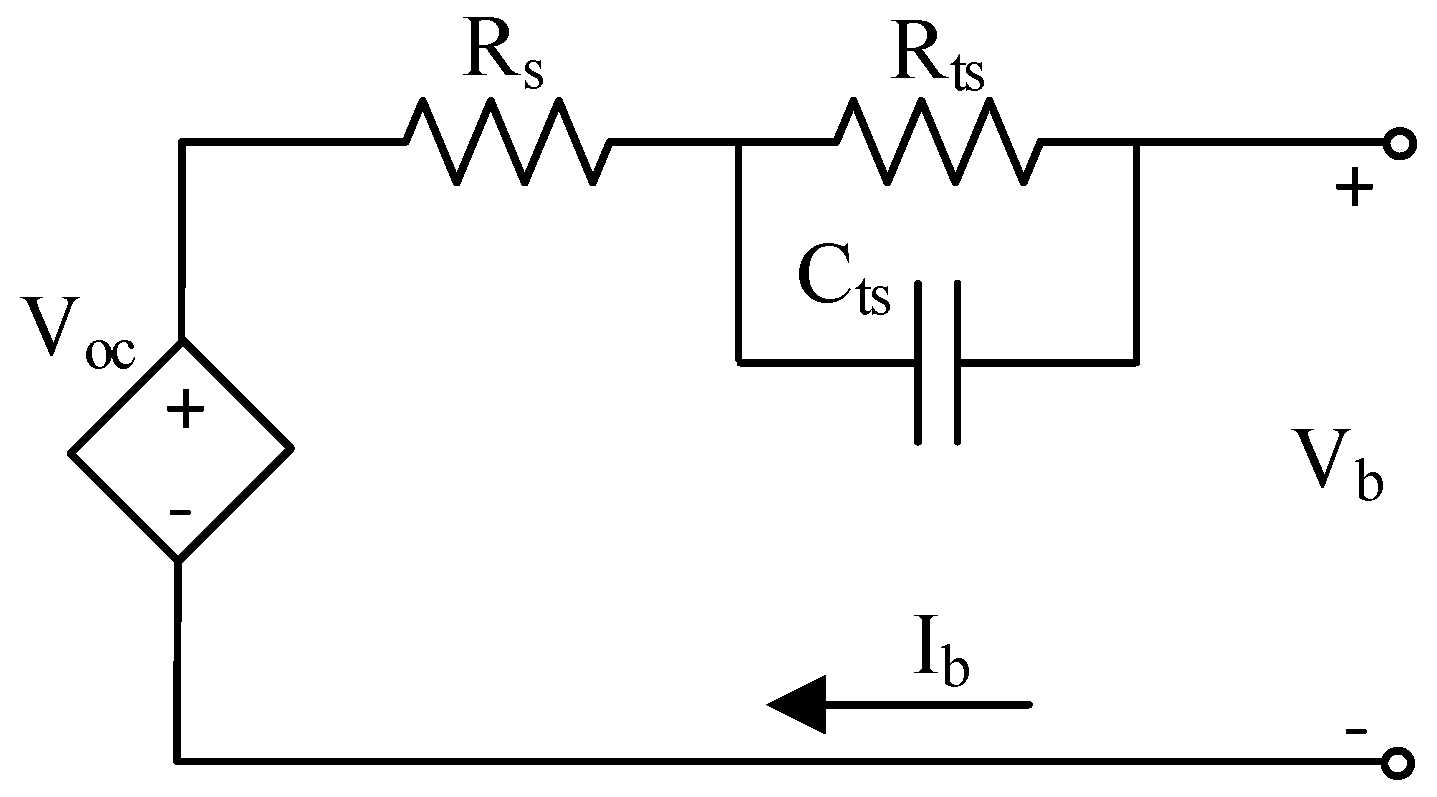
3. Electric Vehicle Battery
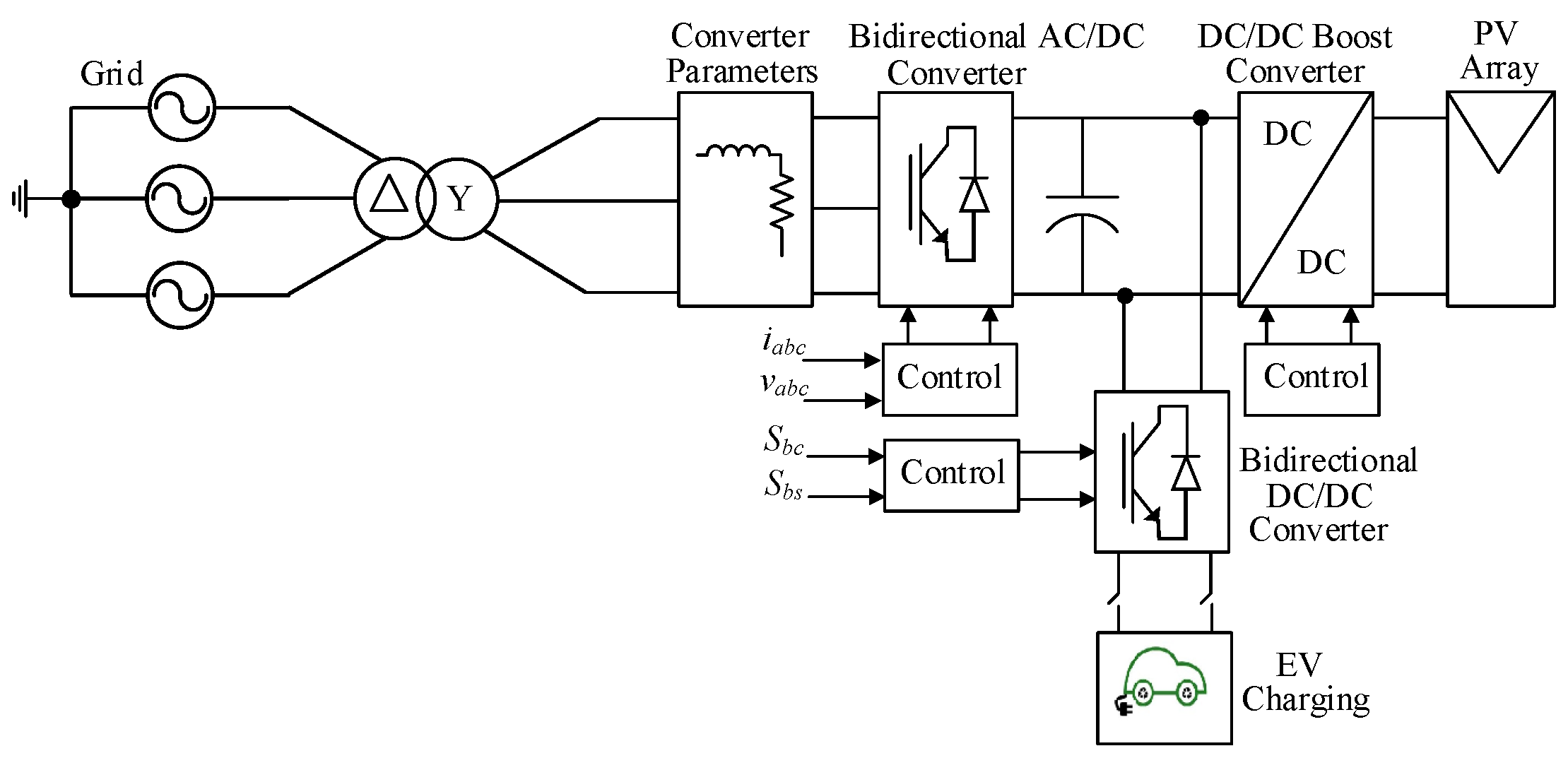
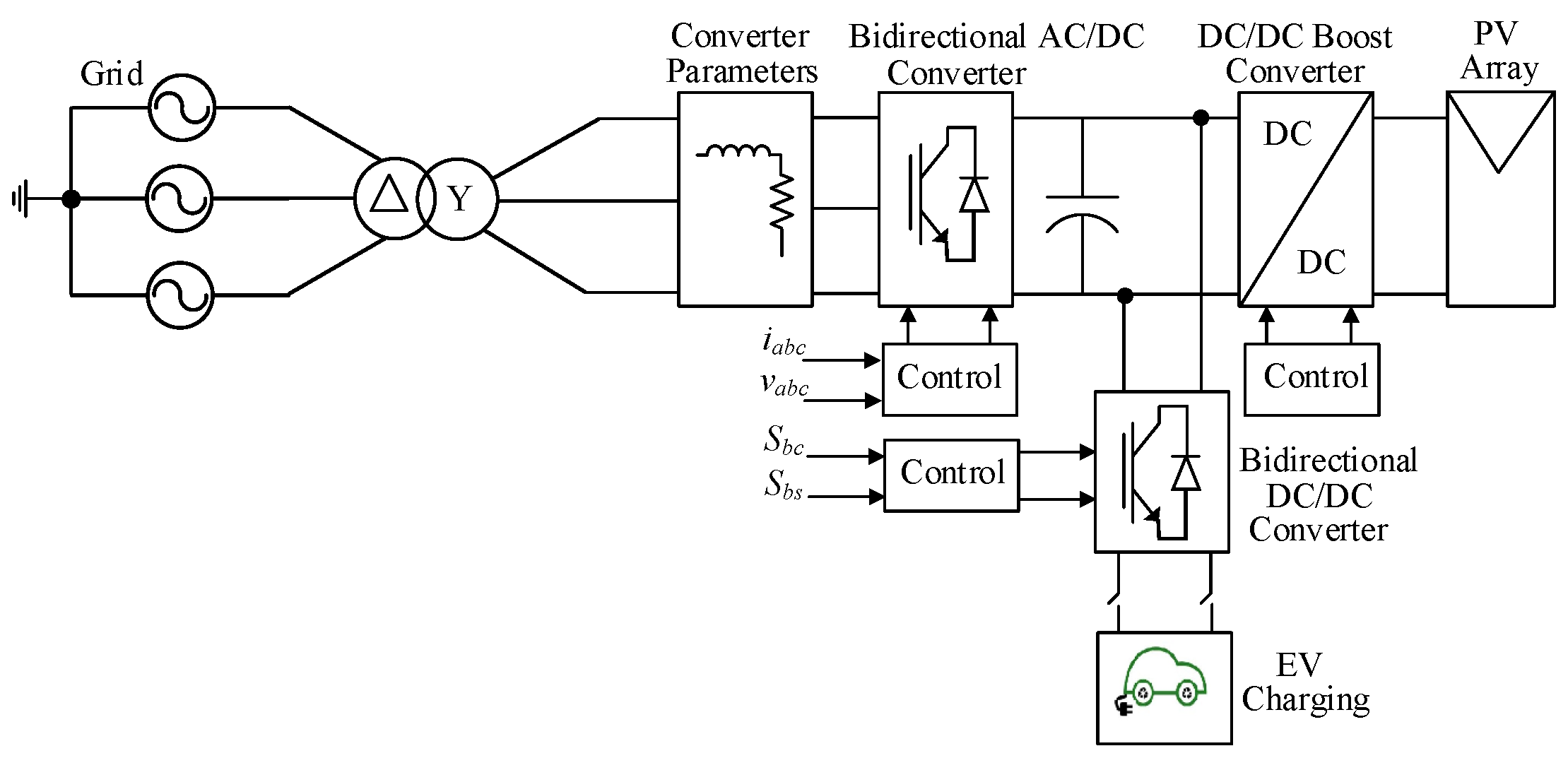
4. Components of the Smart Charging Station
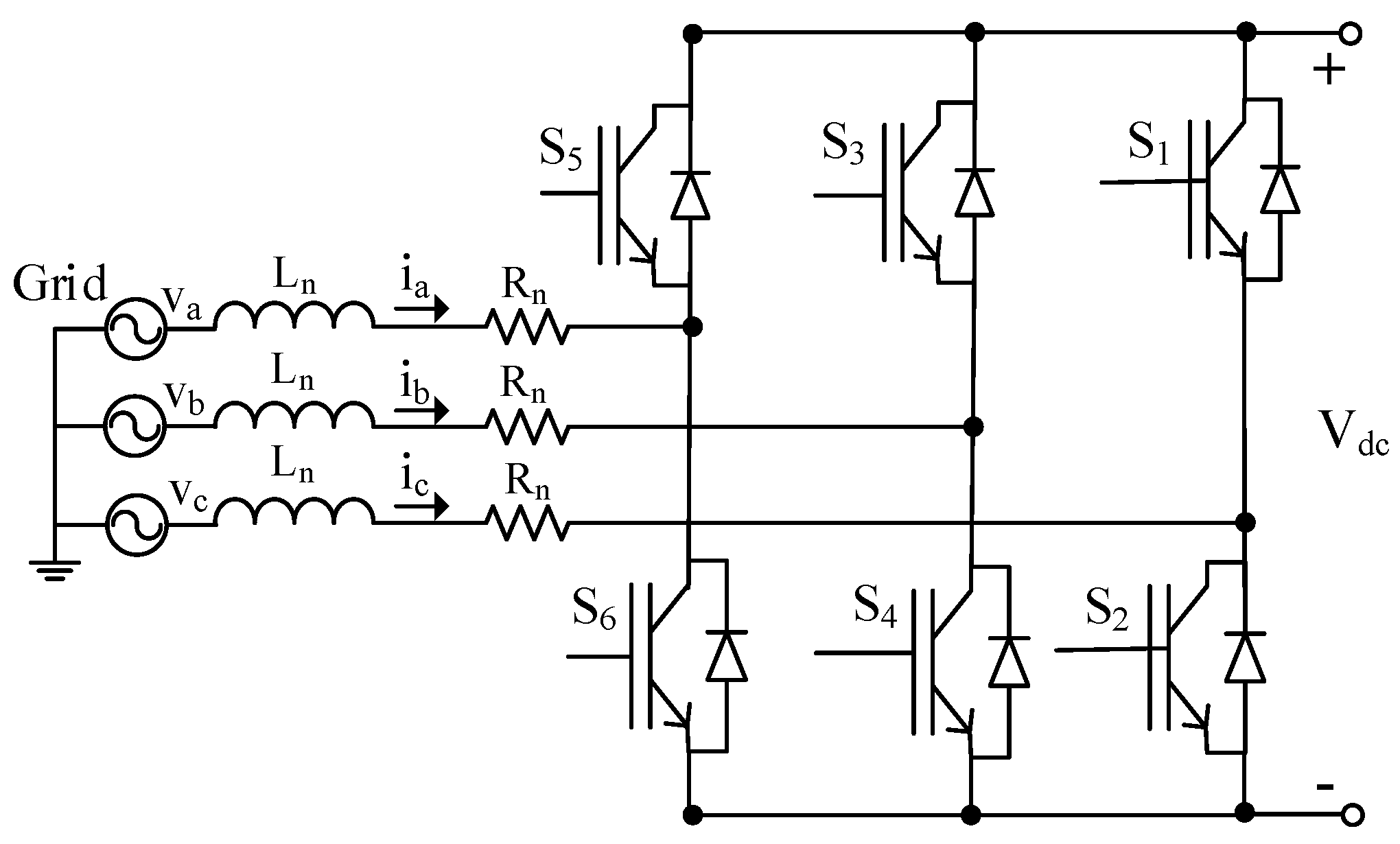
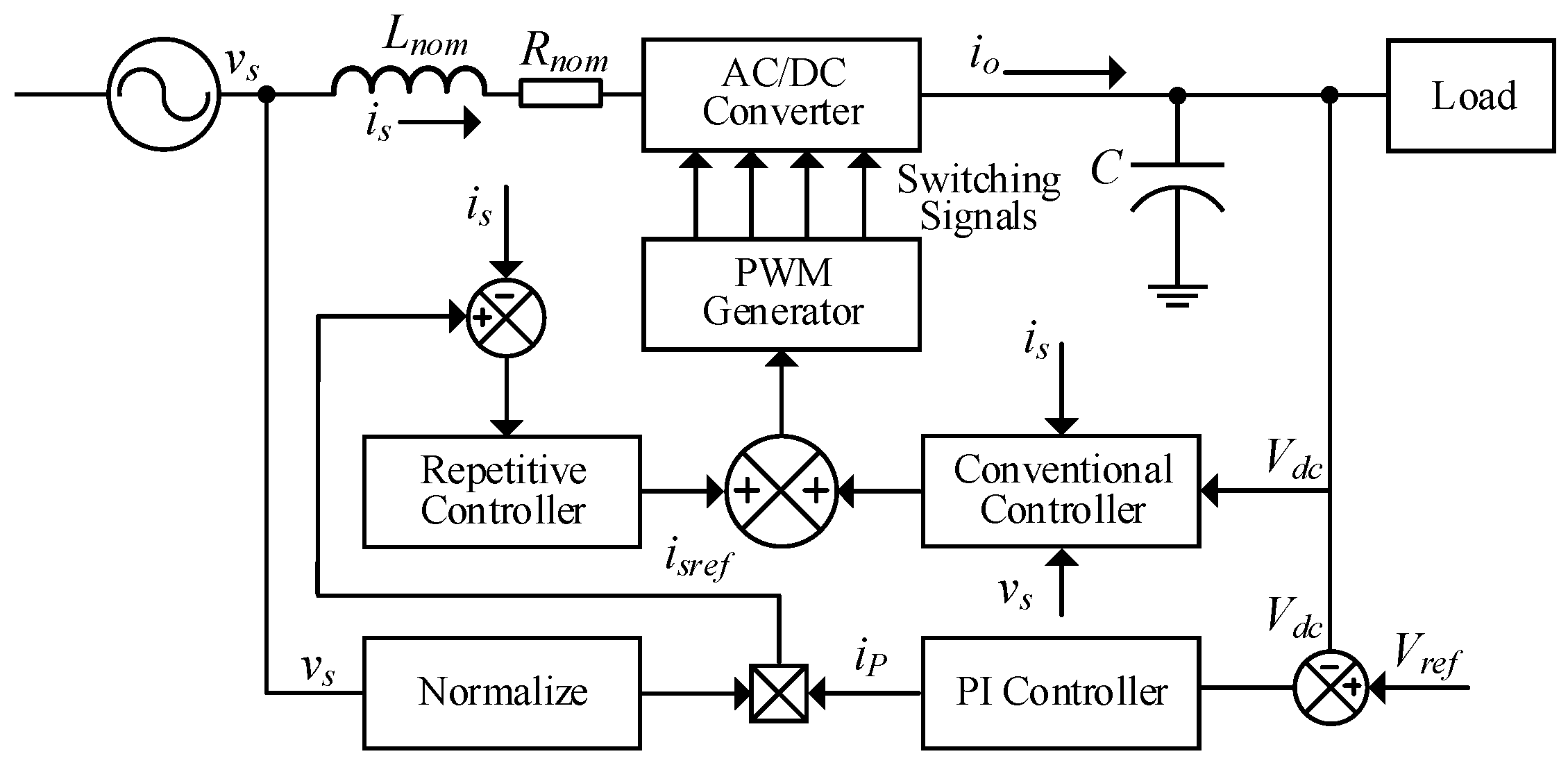
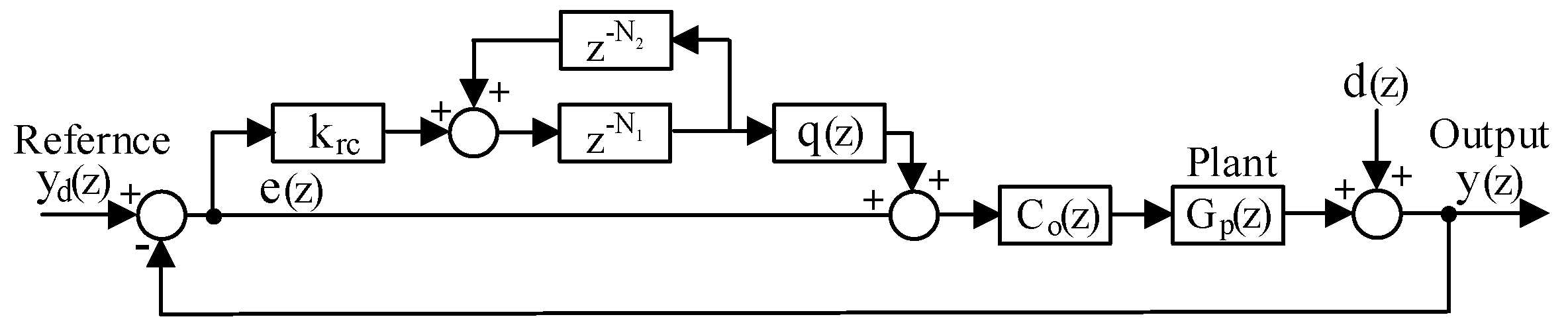
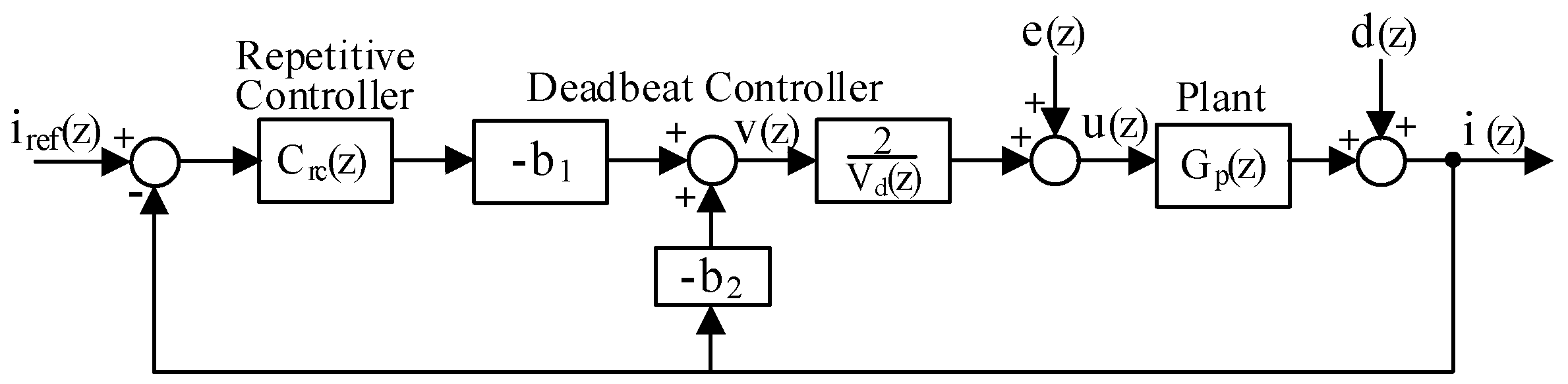
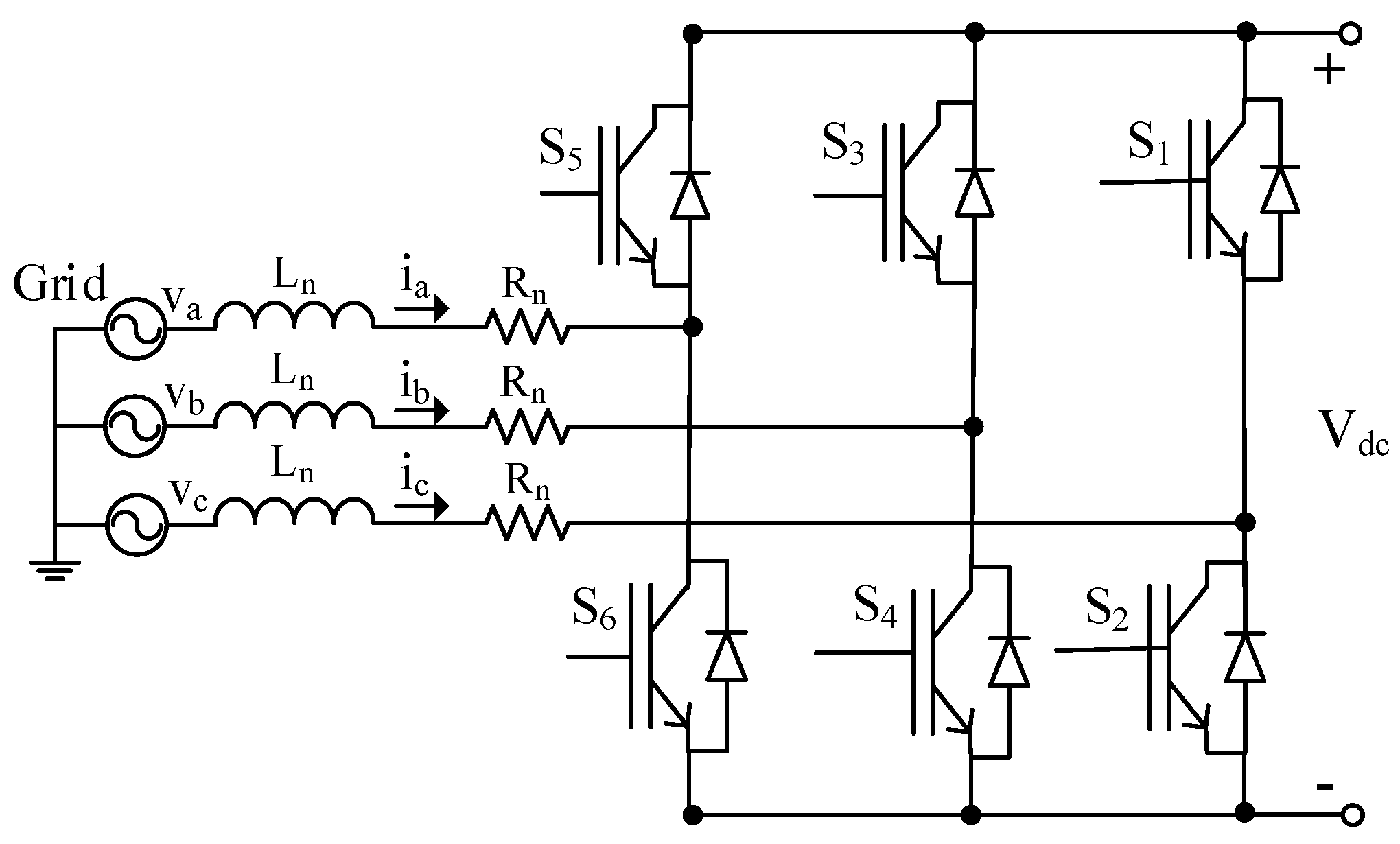
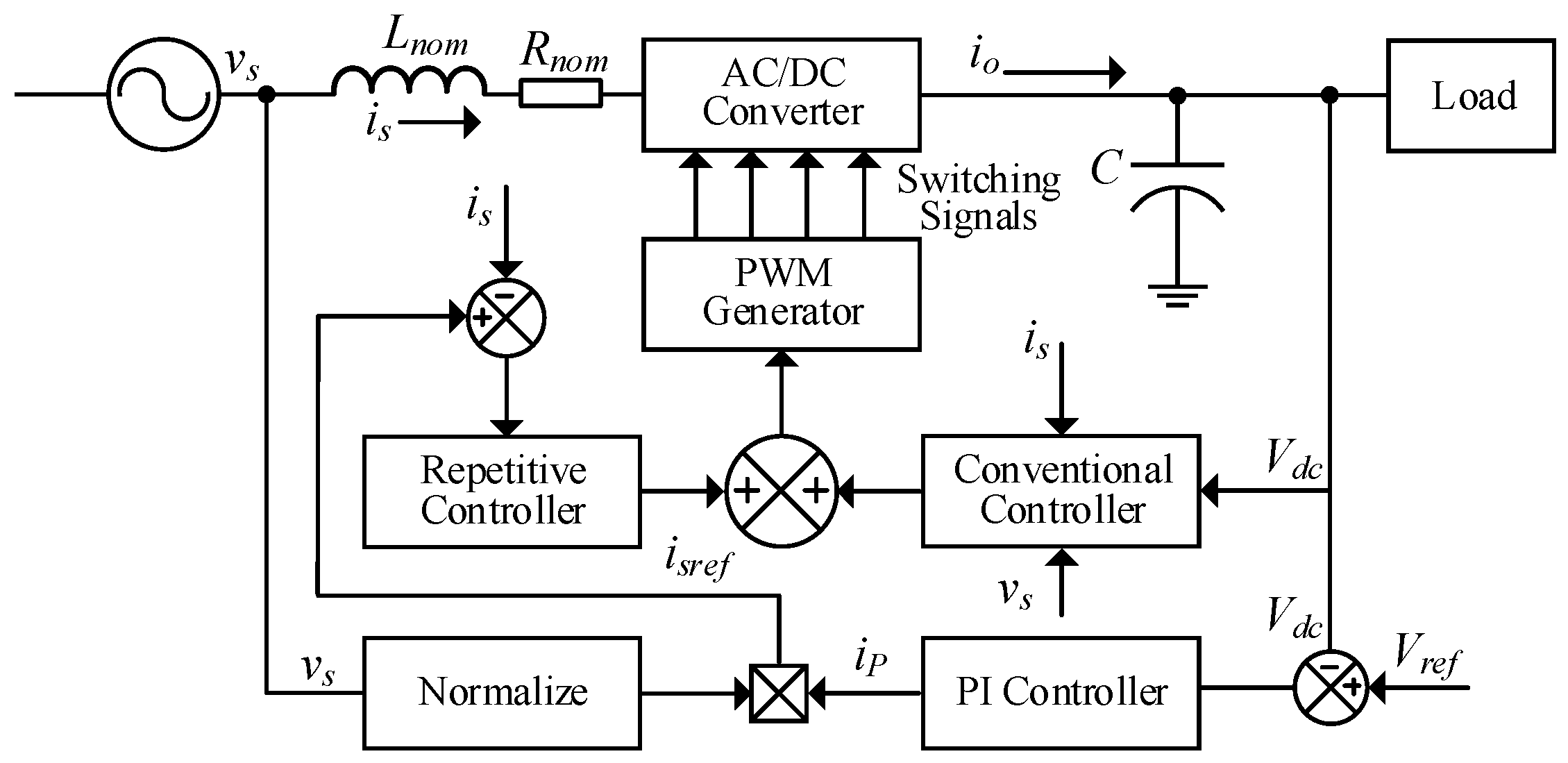
4.1. Grid-Interfaced Bidirectional Power Converter
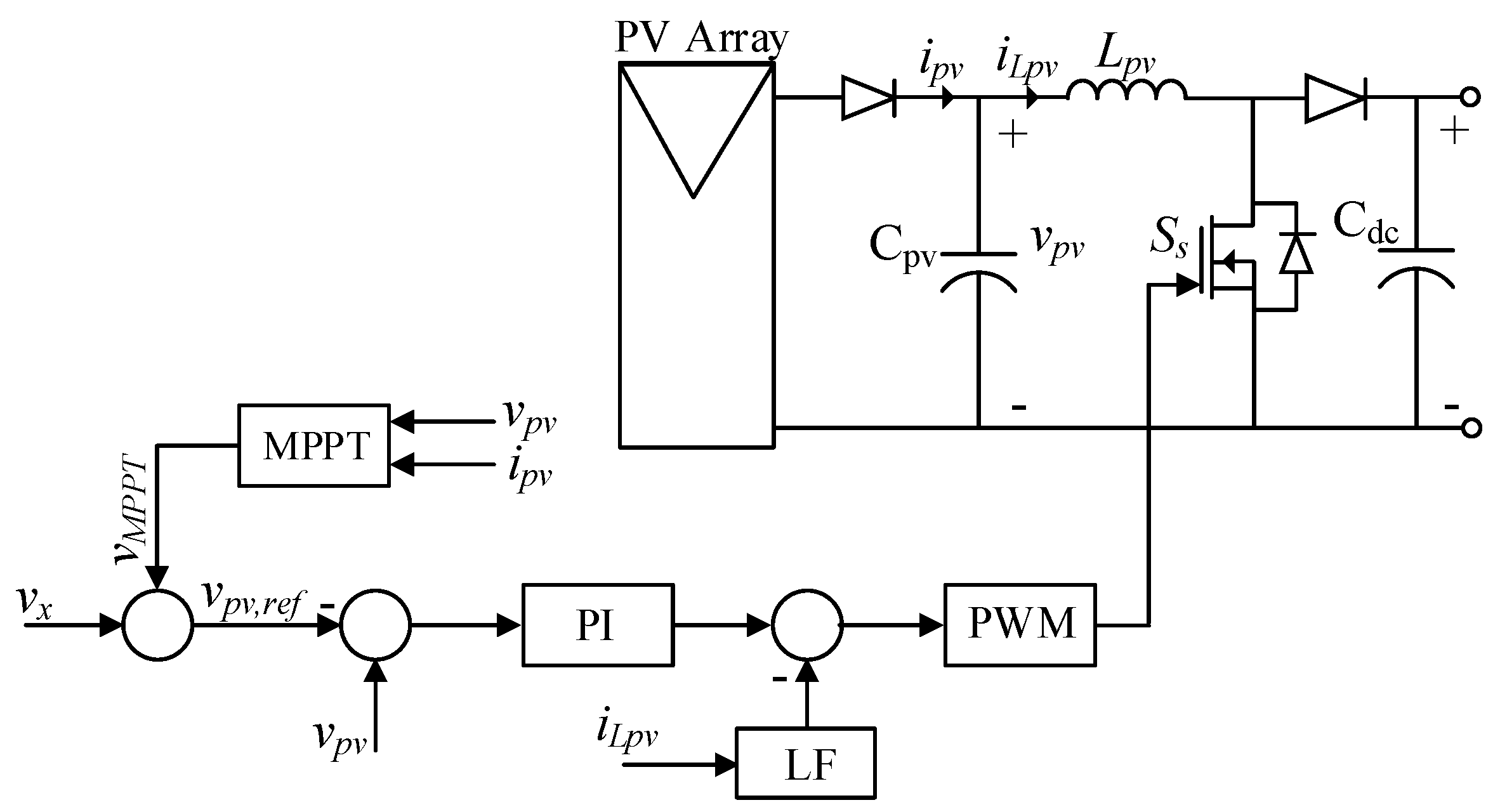
4.2. PV Structure
4.2.1. DC/DC Boost Converter
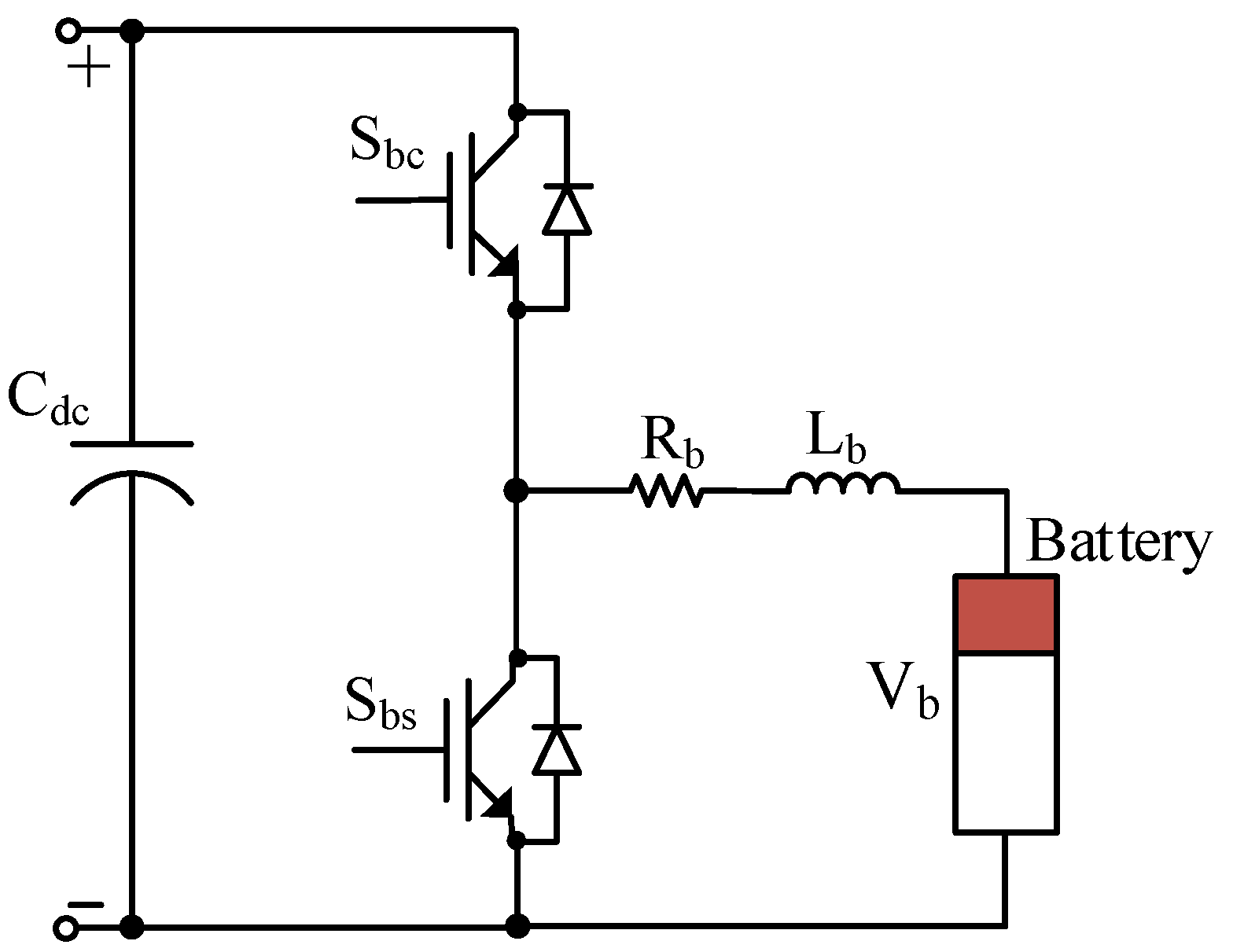
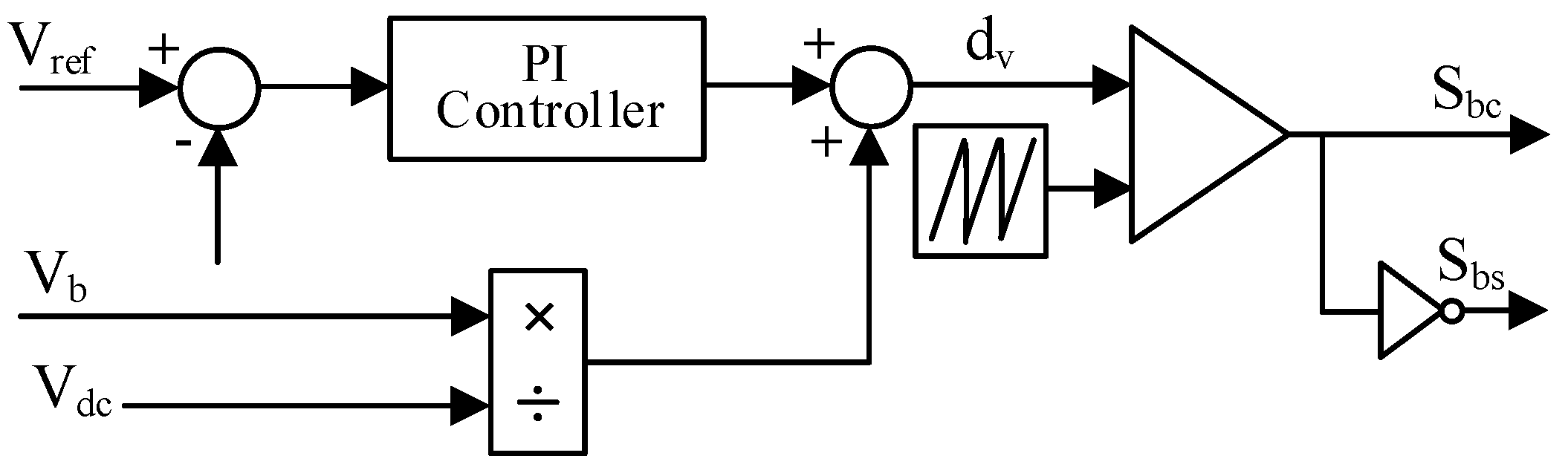
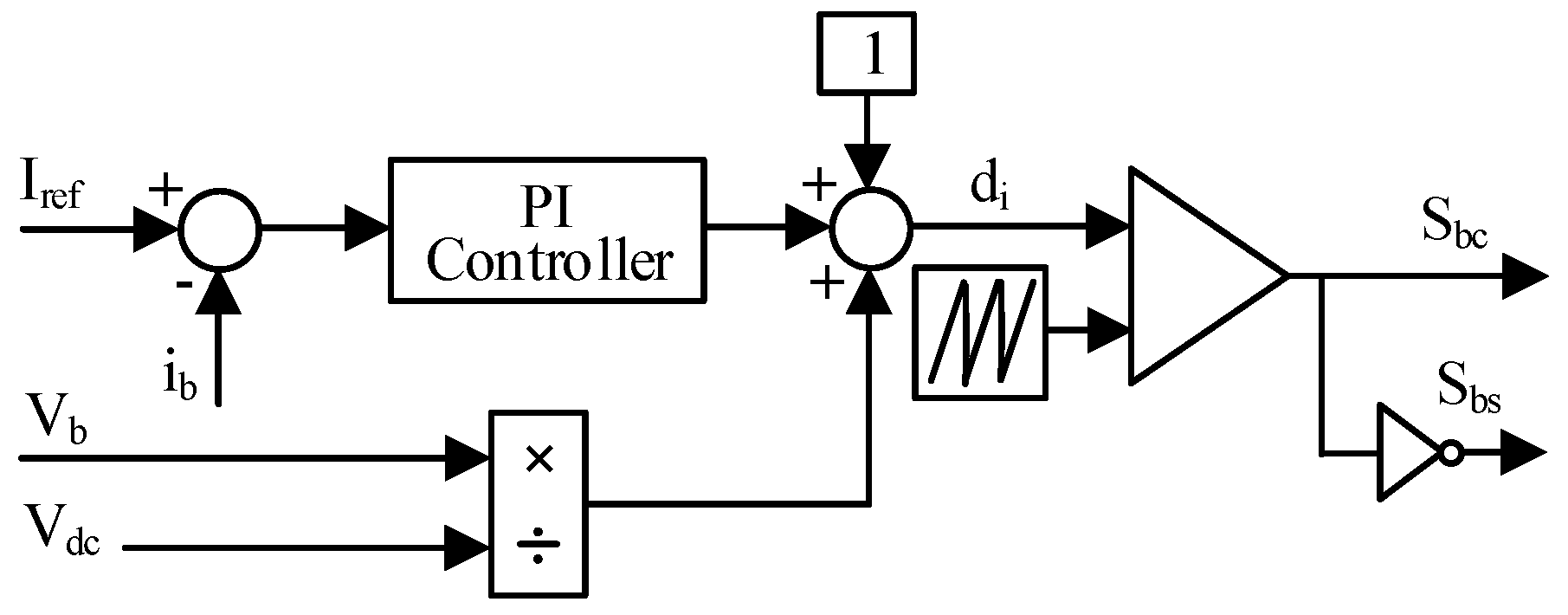
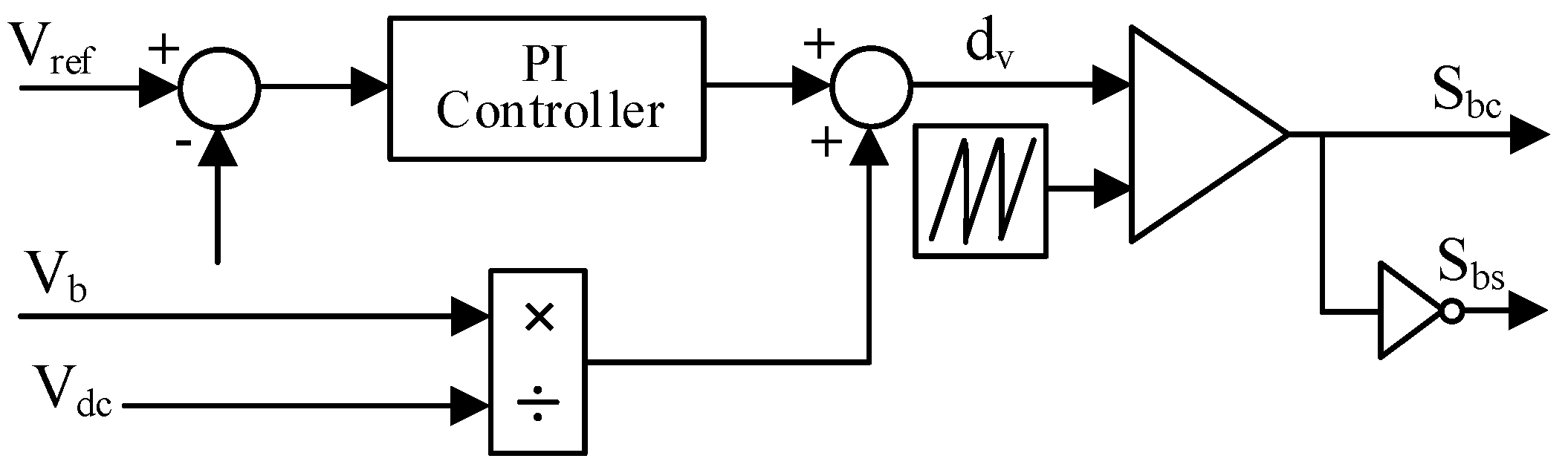
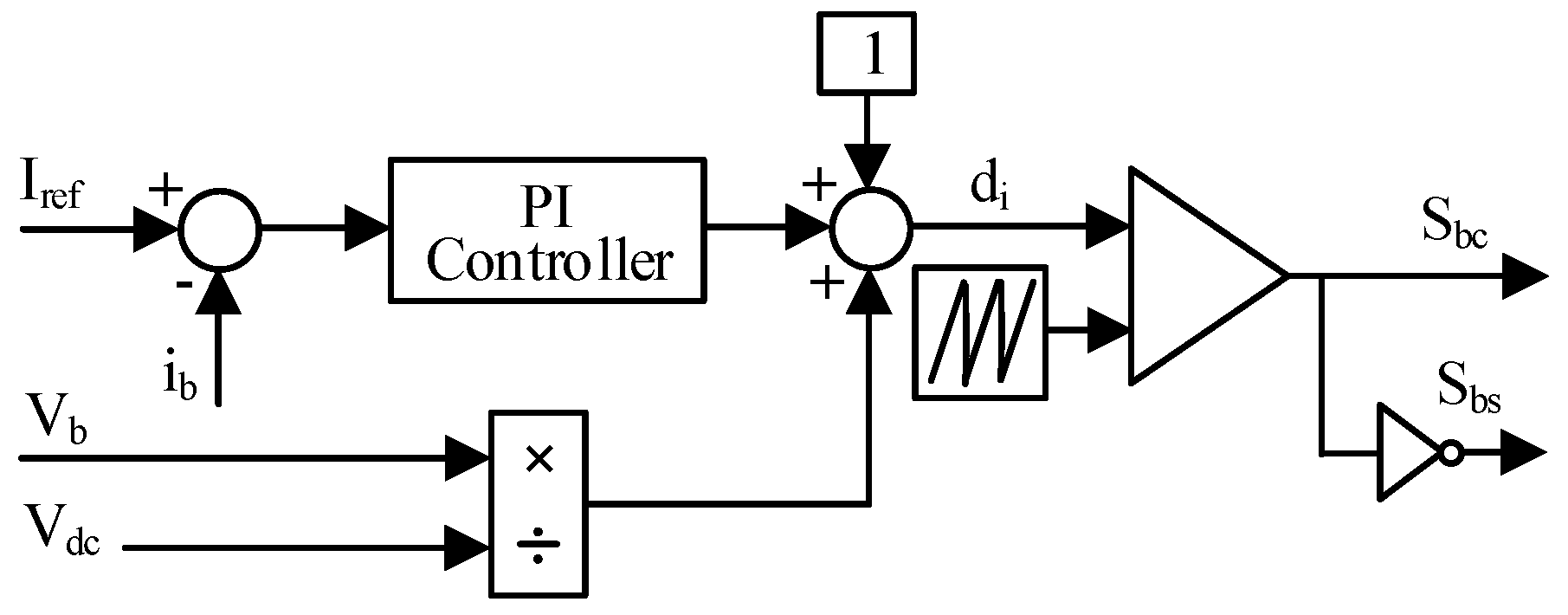
4.3. EV Battery Charging Converter
5. Business Model of EV Charging
5.1. Incentivizing EVs’ Participation in the Demand Response and Regulation Services
5.2. Smart EV Charging and Pricing
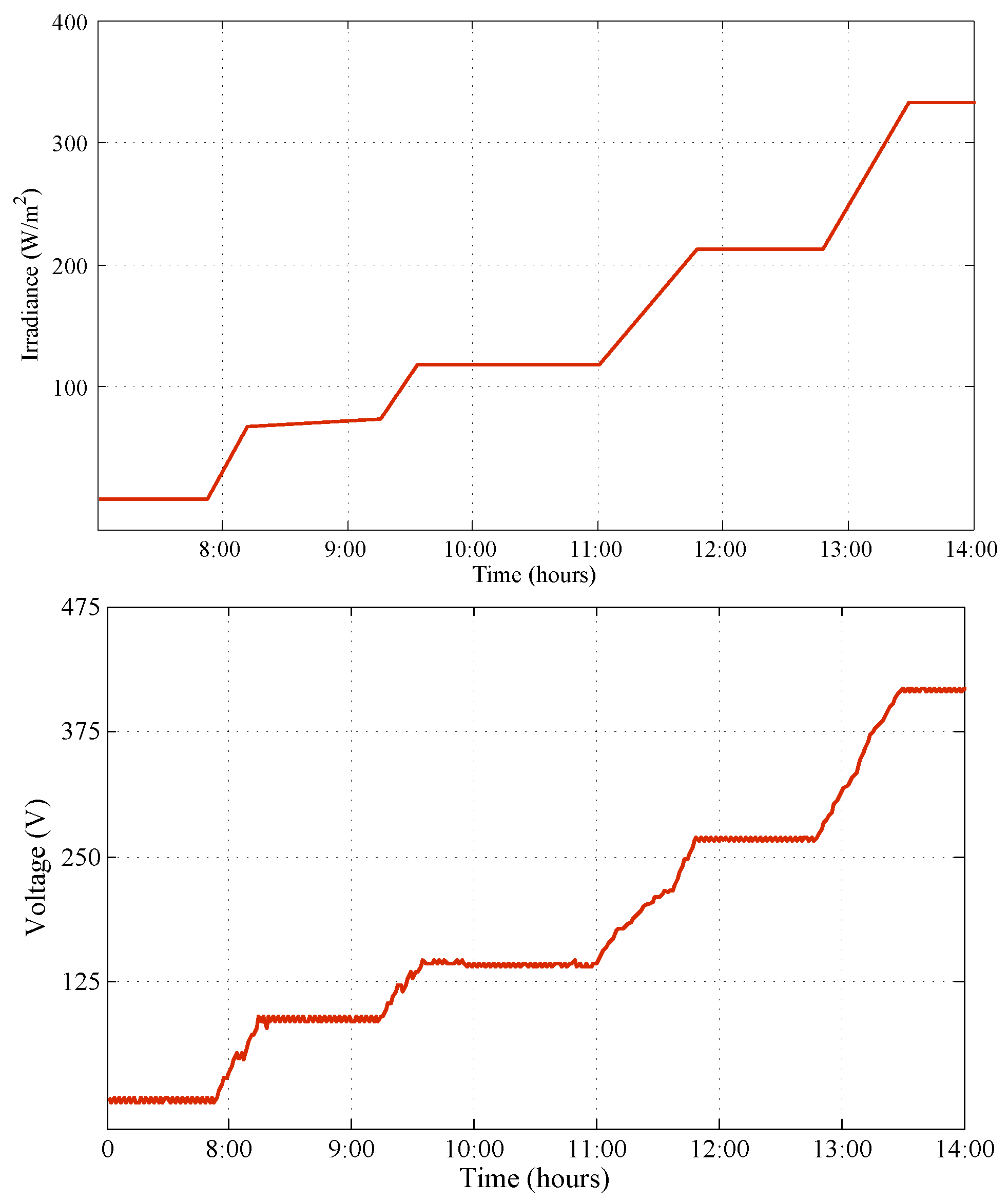
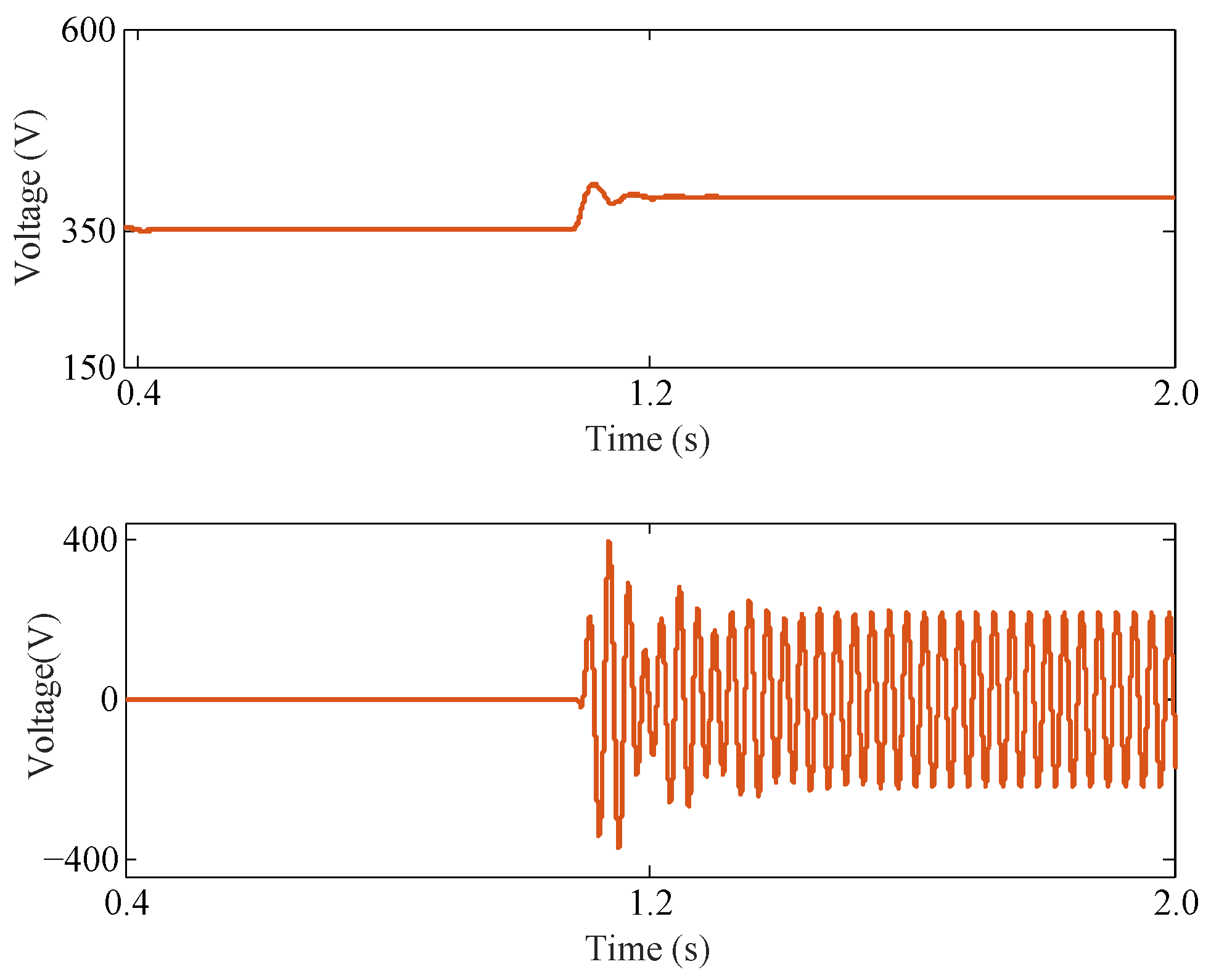
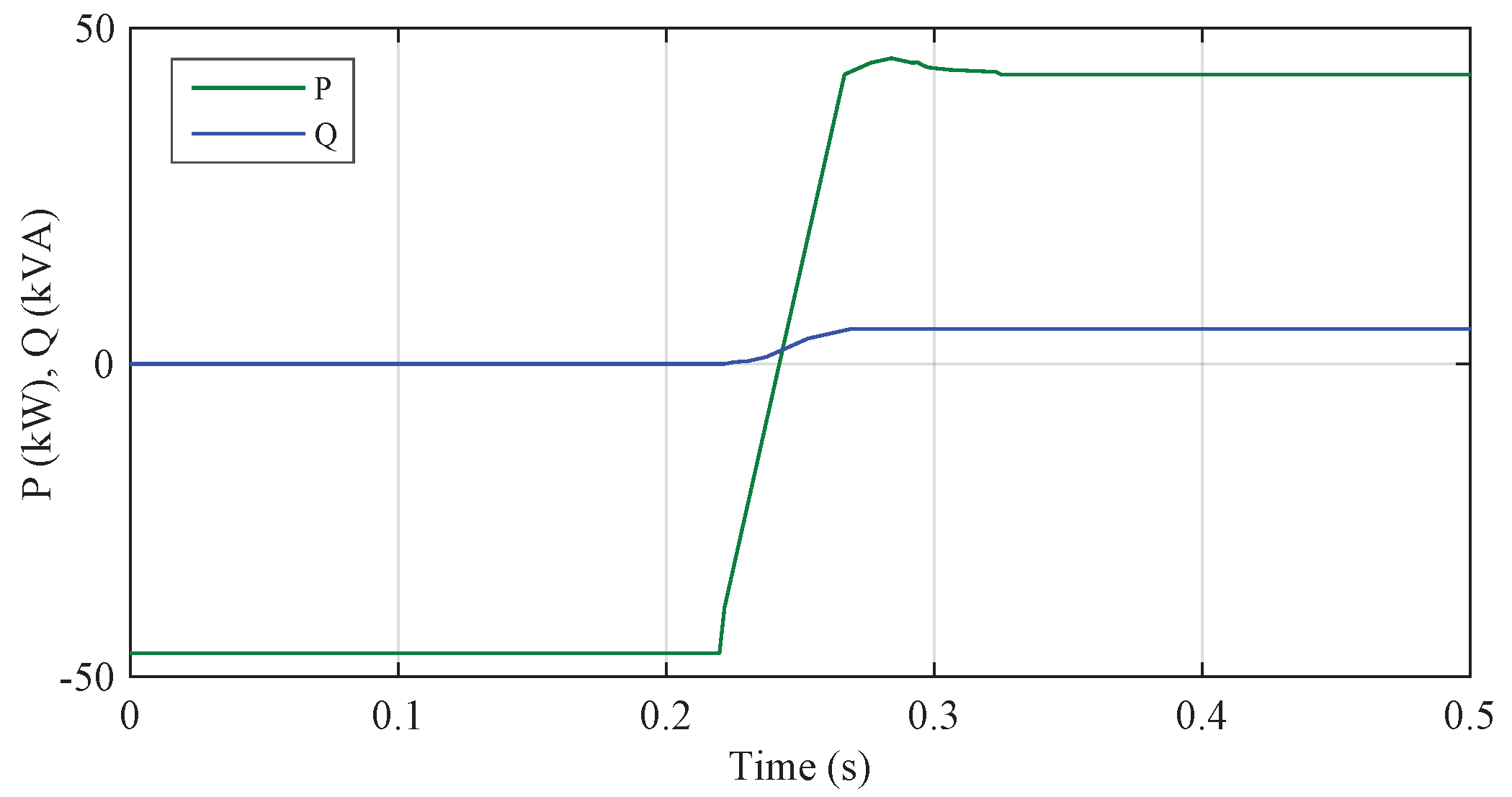
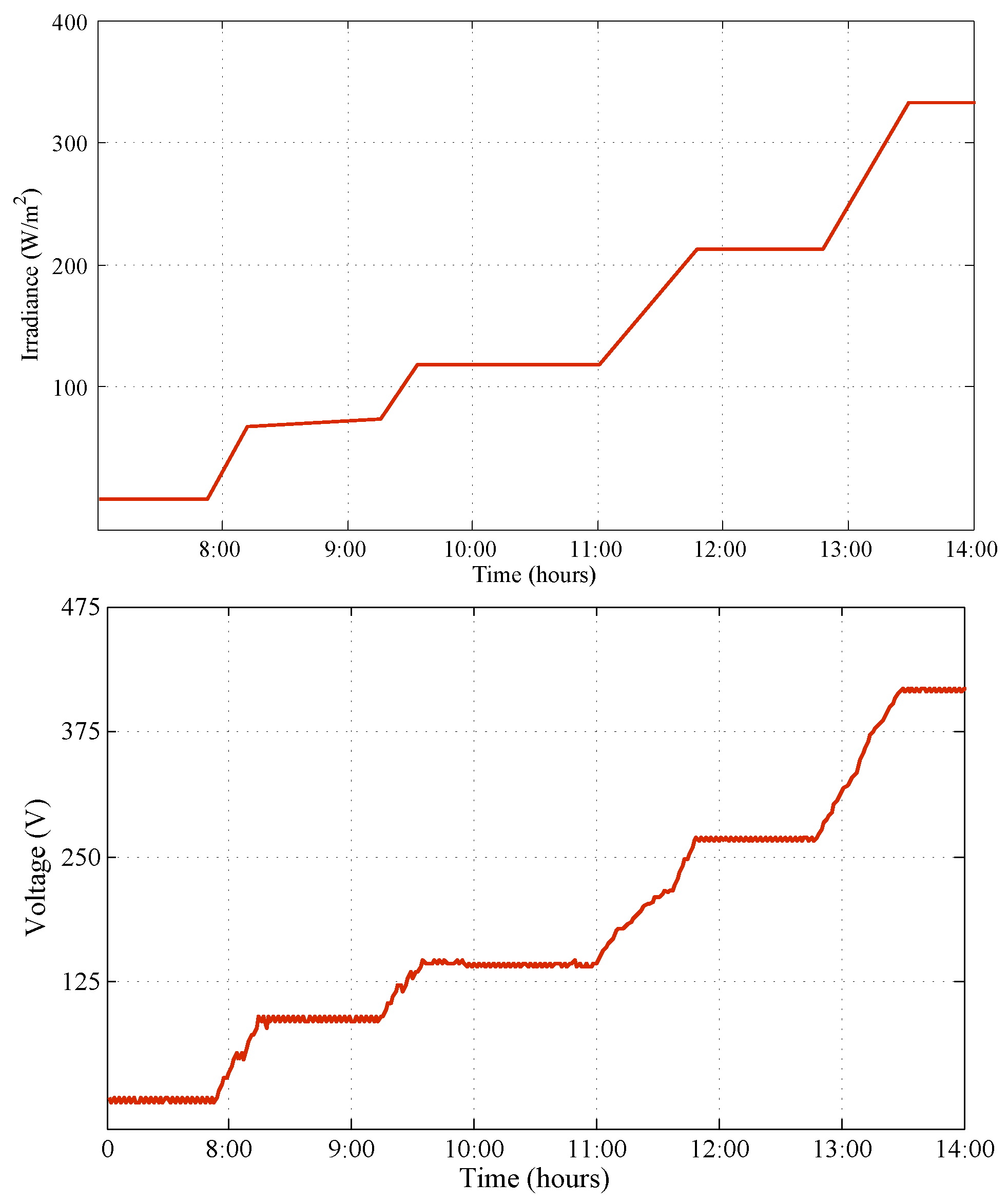
6. Results
7. Conclusions and Future Research Direction
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Deilami, S.; Masoum, A.; Moses, P.; Masoum, M. Real-time coordination of plug-in electric vehicle charging in smart grids to minimize power losses and improve voltage profile. IEEE Trans. Smart Grid 2011, 2, 456–467. [Google Scholar] [CrossRef]
- Kempton, W.; Tomic, J. Vehicle-to-grid power implementation: From stabilizing the grid to supporting large-scale renewable energy. J. Power Sources 2005, 144, 280–294. [Google Scholar] [CrossRef]
- SAE International. Charging Configurations and Ratings Terminology. Available online: http://www.sae.org/smartgrid/chargingspeeds.pdf (accessed on 3 May 2016).
- International Electrotechnical Commission (IEC). Available online: http://webstore.iec.ch (accessed on 17 April 2016).
- CHAdeMO Association. Available online: http://www.chademo.com (accessed on 2 March 2016).
- Sortomme, E.; El-Sharkawi, M. Optimal charging strategies for unidirectional vehicle-to-grid. IEEE Trans. Smart Grid 2011, 2, 131–138. [Google Scholar] [CrossRef]
- Masoum, A.; Deilami, S.; Moses, P.; Masoum, M.; Abu-Siada, A. Smart loadmanagement of plug-in electric vehicles in distribution and residential networks with charging stations for peak shaving and loss minimisation considering voltage regulation. IET Gener. Transm. Distrib. 2011, 5, 877–888. [Google Scholar] [CrossRef]
- Han, S.; Han, S.; Sezaki, K. Development of an optimal vehicle-togrid aggregator for frequency regulation. IEEE Trans. Smart Grid 2010, 1, 65–72. [Google Scholar]
- Wu, C.; Mohsenian-Rad, H.; Huang, J. Vehicle-To-Aggregator Interaction Game. IEEE Trans. Smart Grid 2012, 3, 434–442. [Google Scholar] [CrossRef]
- Sbordone, D.; Bertini, I.; Di Pietra, B.; Falvo, M.C.; Genovese, A.; Martirano, L. EV fast charging stations and energy storage technologies: A real implementation in the smart micro grid paradigm. Electr. Power Syst. Res. 2015, 120, 96–108. [Google Scholar] [CrossRef]
- Mouli, G.C.; Bauer, P.; Zeman, M. System design for a solar powered electric vehicle charging station for workplaces. Appl. Energy 2016, 168, 434–443. [Google Scholar] [CrossRef]
- Bianchi, F.D.; Domínguez-García, J.L.; Gomis-Bellmunt, O. Control of multi-terminal HVDC networks towards wind power integration: A review. Renew. Sustain. Energy Rev. 2016, 55, 1055–1068. [Google Scholar] [CrossRef]
- Arancibia, A.; Strunz, K. Modeling of an Electric Vehicle Charging Station for Fast DC Charging. In Proceedings of the 2012 IEEE International Electric Vehicle Conference (IEVC), Greenville, SC, USA, 4–8 March 2012; pp. 1–6.
- Aggeler, D.; Canales, F.; Zelaya, H.; de la Parra; Coccia, A.; Butcher, N.; Apeldoorn, O. Ultra-Fast DC-Charge Infrastructures for EV-Mobility and Future Smart Grids. In Proceedings of the 2010 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT Europe), Gothenberg, Sweden, 11–13 October 2010; pp. 1–8.
- Berthold, F.; Ravey, A.; Blunier, B.; Bouquain, D.; Williamson, S.; Miraoui, A. Design and development of a smart control strategy for plug-in hybrid vehicles including vehicle-to-home functionality. IEEE Trans. Transp. Electr. 2015, 1, 168–177. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, G.; Lukic, S.; Bhattacharya, S.; Huang, A. Multifunction Bi-Directional Battery Charger for Plug-in Hybrid Electric Vehicle Application. In Proceedings of the 2009 IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 3930–3936.
- Kramer, B.; Chakraborty, S.; Kroposki, B. A Review of Plug-in Vehicles and Vehicle-to-Grid Capability. In Proceedings of the 34th Annual Conference of the IEEE Industrial Electronics Society (IECON), Orlando, FL, USA, 10–13 November 2008; pp. 2278–2283.
- Kisacikoglu, M.; Ozpineci, B.; Tolbert, L. Effects of V2G Reactive Power Compensation on the Component Selection in an EV or PHEV Bidirectional Charger. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Atlanta, GA, USA, 12–16 September 2010; pp. 870–876.
- Kisacikoglu, M.; Ozpineci, B.; Tolbert, L. Reactive Power Operation Analysis of a Single-Phase EV/PHEV Bidirectional Battery Charger. In Proceedings of the IEEE 8th International Conference on Power Electronics (ECCE Asia), Jeju, Korea, 30 May–3 June 2011; pp. 585–592.
- Neumann, H.; Schar, D.; Baumgartner, F. The Potential of Photovoltaic Carports to Cover the Energy Demand of Road Passenger Transport. Prog. Photovolt. Res. Appl. 2012, 20, 639–649. [Google Scholar] [CrossRef]
- Locment, F.; Sechilariu, M.; Forgez, C. Electric Vehicle Charging System with PV Grid-connected Configuration. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Lille, France, 1–3 September 2010.
- Erickson, L.E.; Robinson, J.; Brase, G.; Cutsor, J. Solar Powered Charging Infrastructure for Electric Vehicles: A Sustainable Development; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Tulpule, P.J.; Marano, V.; Yurkovich, S.; Rizzoni, G. Economic and Environmental Impacts of a PV Powered Workplace Parking Garage Charging Station. J. Appl. Energy 2013, 108, 323–332. [Google Scholar] [CrossRef]
- Birnie, D.P., III. Solar-to-Vehicle (S2V) Systems for Powering Commuters of the Future. J. Power Sources 2009, 186, 539–542. [Google Scholar] [CrossRef]
- Carlsson, F.; Johansson-Stenman, O. Costs and Benefits of Electric Vehicles a 2010 Perspective. J. Transp. Policy 2003, 37, 1–28. [Google Scholar]
- Markel, T.; Simpson, A. Cost-Benefit Analysis of Plug-in Hybrid Electric Vehicle Technology. In Proceedings of the 22nd International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium and Exhibition (EVS-22), Yokohama, Japan, 25–28 October 2006.
- Anair, D.; Mahmassani, A. Electric Vehicles’ Global Warming Emissions and Fuel-Cost Savings Across the United States; UCS Publications: Cambridge, MA, USA, 2012. [Google Scholar]
- Leterme, W.; Ruelens, F.; Claessens, B.; Belmans, R. A Flexible Stochastic Optimization Method for Wind Power Balancing with PHEVs. IEEE Trans. Smart Grid 2014, 5, 1238–1245. [Google Scholar] [CrossRef]
- Kockar, I.I.; Papadaskalopoulos, D.; Strbac, G.; Pudjianto, D.; Galloway, S.; Burt, G. Dynamic Pricing in Highly Distributed Power Systems of the Future. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–4.
- O’Connell, N.; Wu, Q.; Ostergaard, J.; Nielsen, A.H.; Cha, S.T.; Ding, Y. Electric Vehicle (EV) Charging Management with Dynamic Distribution System Tariff. In Proceedings of the 2011 IEEE Innovative Smart Grid Technologies, Manchester, UK, 5–7 December 2011.
- Faruqui, A.; Harris, D.; Hledik, R. Unlocking the V53 Billion Savings from Smart Meters in the EU: How Increasing the Adoption of Dynamic Tariffs Could Make or Break the Eu’s Smart Grid Investment. Energy Policy 2009, 38, 6222–6231. [Google Scholar] [CrossRef]
- Jaske, M.; Rosenfeld, A. Dynamic Pricing, Advanced Metering, and Demand Response in Electricity Markets; Center for the Study of Energy Markets Working Paper Series, No. 105; University of California Energy Institute: Berkeley, CA, USA, 2002. [Google Scholar]
- Brandstätt, C.; Brunekreeft, G.; Friedrichsen, N. Locational Signals to Reduce Network Investments in Smart Distribution Grids: What Works and What Not? Util. Policy 2011, 19, 244–254. [Google Scholar] [CrossRef]
- Kirkham, H. Current Measurement Methods for the Smart Grid. In Proceedings of the Power & Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009.
- Kouro, S.; Leon, I.; Vinnikov, D.; Franquelo, L.G. Grid-Connected Photovoltaic Systems: An Overview of Recent Research and Emerging PV Converter Technology. IEEE Ind. Electron. Mag. 2015, 9, 47–61. [Google Scholar] [CrossRef]
- Gholizadeh, M.; Salmasi, F.R. Estimation of state of charge, unknown nonlinearities, and state of health OFA lithium-ion battery based on a comprehensive unobservable model. IEEE Trans. Ind. Electron. 2014, 61, 1335–1344. [Google Scholar] [CrossRef]
- Baba, A.; Kinnosuke, I.; Teranishi, N.; Edamoto, Y.; Osamura, K.; Maruta, I.; Adachi, S. Simultaneous Estimation of the Soc and Parameters of Batteries for HEV/EV; SAE Technical Paper, No. 2016-01-1195; The Society of Automotive Engineers (SAE): Warrendale, PA, USA, 2016. [Google Scholar]
- Layadi, T.M.; Champenois, G.; Mostefai, M.; Abbes, D. Lifetime estimation tool of lead acid Batteries for hybrid power sources design. Simul. Model. Pract. Theory 2015, 54, 36–48. [Google Scholar] [CrossRef]
- Carter, R.; Cruden, A.; Hall, P.J.; Zaher, A.S. An improved lead-acid battery pack model for use in power simulations of electric vehicles. IEEE Trans. Energy Convers. 2012, 27, 21–28. [Google Scholar] [CrossRef]
- Buccella, C.; Cecati, C.; Khalid, H.A.; Ul-Haq, A. On flatness-based control for series-connected VSC for voltage dip mitigation. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 2637–2642.
- Zhou, K.; Wang, D.; Zhang, B.; Wang, Y. Plug-in dual-mode-structure repetitive controller for CVCF PWM inverters. IEEE Trans. Ind. Electron. 2009, 56, 784–791. [Google Scholar] [CrossRef]
- Escobar, G.; Valdez, A.; Leyva-Ramos, J.; Mattavelli, P. Repetitive-based controller for a UPS inverter to compensate unbalance and harmonic distortion. IEEE Trans. Ind. Electron. 2007, 54, 504–510. [Google Scholar] [CrossRef]
- Zhou, K.; Low, K.S.; Wang, Y.; Luo, F.-L.; Zhang, B. Zero-phase odd-harmonic repetitive controller for a single-phase PWM inverter. IEEE Trans. Power Electron. 2006, 21, 193–201. [Google Scholar] [CrossRef]
- Lu, W.; Zhou, K.; Wang, D.; Cheng, M. A general parallel structure repetitive control scheme for multiphase DC–AC PWM converters. IEEE Trans. Power Electron. 2013, 28, 3980–3987. [Google Scholar] [CrossRef]
- Rauschenbach, H.S. Solar Cell Array Design Handbook; Van Nostrand Reinhold: New York, NY, USA, 1980. [Google Scholar]
- Xiao, W.; Edwin, F.; Spagnuolo, G.; Jatskevich, J. Efficient approaches for modelling and simulating photovoltaic power systems. IEEE J. Photovolt. 2013, 3, 500–508. [Google Scholar] [CrossRef]
- Khalid, M.S.; Abido, M.A. A novel and accurate photovoltaic simulator based on seven-parameter model. Electr. Power Syst. Res. 2014, 116, 243–251. [Google Scholar] [CrossRef]
- Vimalarani, C.; Kamaraj, N. Modeling and performance analysis of the solar photovoltaic cell model using embedded matlab. Simulation 2015, 91, 217–232. [Google Scholar] [CrossRef]
- Nishioka, K.; Sakitani, N.; Uraoka, Y.; Fuyuki, T. Analysis of multicrystalline silicon solar cells by modified 3-Diode equivalent circuit model taking leakage current through periphery into consideration. Sol. Energy Mater. Sol. Cells 2007, 91, 1222–1227. [Google Scholar] [CrossRef]
- Verma, D.; Savita, N.; Shandilya, A.M.; Soubhagya, K.D. Maximum power point tracking (MPPT) techniques: Recapitulation in solar photovoltaic systems. Renew. Sustain. Energy Rev. 2016, 54, 1018–1034. [Google Scholar] [CrossRef]
- Eftekharnejad, S.; Vijay, V.; Gerald, T.H.; Keel, B.; Jeffrey, L. Small signal stability assessment of power systems with increased penetration of photovoltaic generation: A case study. IEEE Trans. Sustain. Energy 2013, 4, 960–967. [Google Scholar] [CrossRef]
- Xiao, W.; Dunford, W.G.; Palmer, P.R.; Capel, A. Regulation of photovoltaic voltage. IEEE Trans. Ind. Electron. 2007, 54, 1365–1374. [Google Scholar] [CrossRef]
- Nemry, F.; Leduc, G.; Munoz, A. Plug-in Hybrid and Battery Electric Vehicles; Institute for Prospective Technological Studies: Seville, Spain, 2010. [Google Scholar]
- Avila, F.; Gonzalez, F. Conexión de Vehículos a la Red Eléctrica (V2G); Pontificia Universidad Católica de Chile: Región Metropolitana, Chile, 2009. [Google Scholar]
- Lizarraga de Miguel, A. Implementation of Power Studio Scada Software; Universidad Politecnica de Cataluna: Barcelona, Spain, 2011. [Google Scholar]
- Perez, L.; Sunyer, L.; Kunzli, N. Estimating the health and economic benefits associated with reducing air pollution in the barcelona metropolitan area. Gac. Sanit. 2009, 23, 287–294. [Google Scholar] [CrossRef] [PubMed]
- Dallinger, D.; Wietschel, M. Grid Integration of Intermittent Renewable Energy Sources Using Price-Responsive Plug-in Electric Vehicles; Working Paper Sustainability and Innovation No. S 7/2011, FhG-ISI; Fraunhofer Institute for Systems and Innovation Research: Karlsruhe, Germany, 2011. [Google Scholar]




© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ul-Haq, A.; Cecati, C.; Al-Ammar, E.A. Modeling of a Photovoltaic-Powered Electric Vehicle Charging Station with Vehicle-to-Grid Implementation. Energies 2017, 10, 4. https://doi.org/10.3390/en10010004
Ul-Haq A, Cecati C, Al-Ammar EA. Modeling of a Photovoltaic-Powered Electric Vehicle Charging Station with Vehicle-to-Grid Implementation. Energies. 2017; 10(1):4. https://doi.org/10.3390/en10010004
Chicago/Turabian StyleUl-Haq, Azhar, Carlo Cecati, and Essam A. Al-Ammar. 2017. "Modeling of a Photovoltaic-Powered Electric Vehicle Charging Station with Vehicle-to-Grid Implementation" Energies 10, no. 1: 4. https://doi.org/10.3390/en10010004