
Research on Partial Discharge Source Localization Based on an Ultrasonic Array and a Step-by-Step Over-Complete Dictionary

Abstract
:1. Introduction
2. Mathematical Model of Square Ultrasonic Array
2.1. Mathematical Model of Array Signal Processing
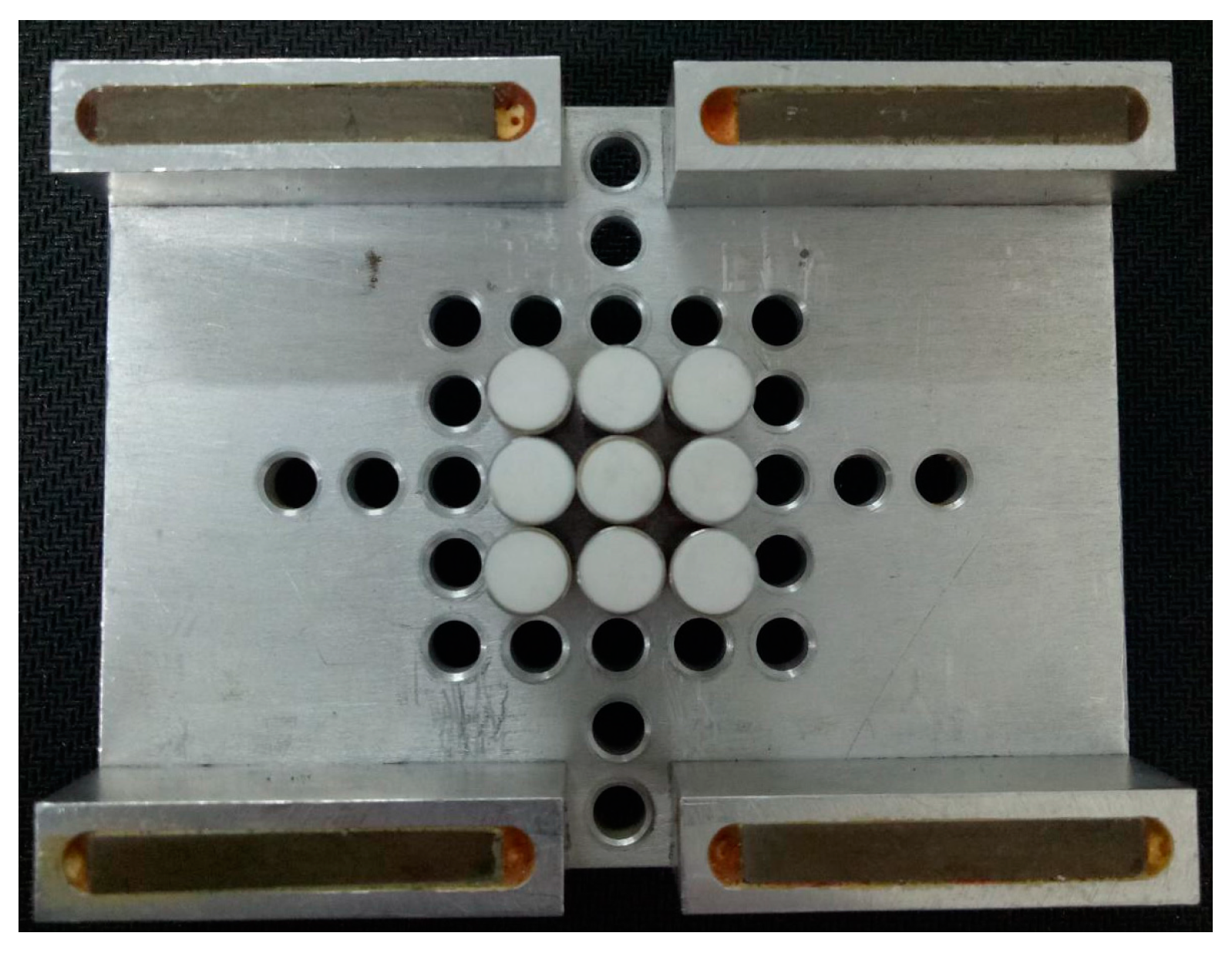
2.2. Square Ultrasonic Array Structure
3. Ultrasonic Array Direction Finding and Location Based on Step-by-Step Over-Complete Dictionary
3.1. DOA Estimation Based on the Matching Pursuit Algorithm
3.2. The Establishment of Step over Complete Atomic Dictionary
3.3. Three Array Cross Positioning Principle
4. Experimental Study
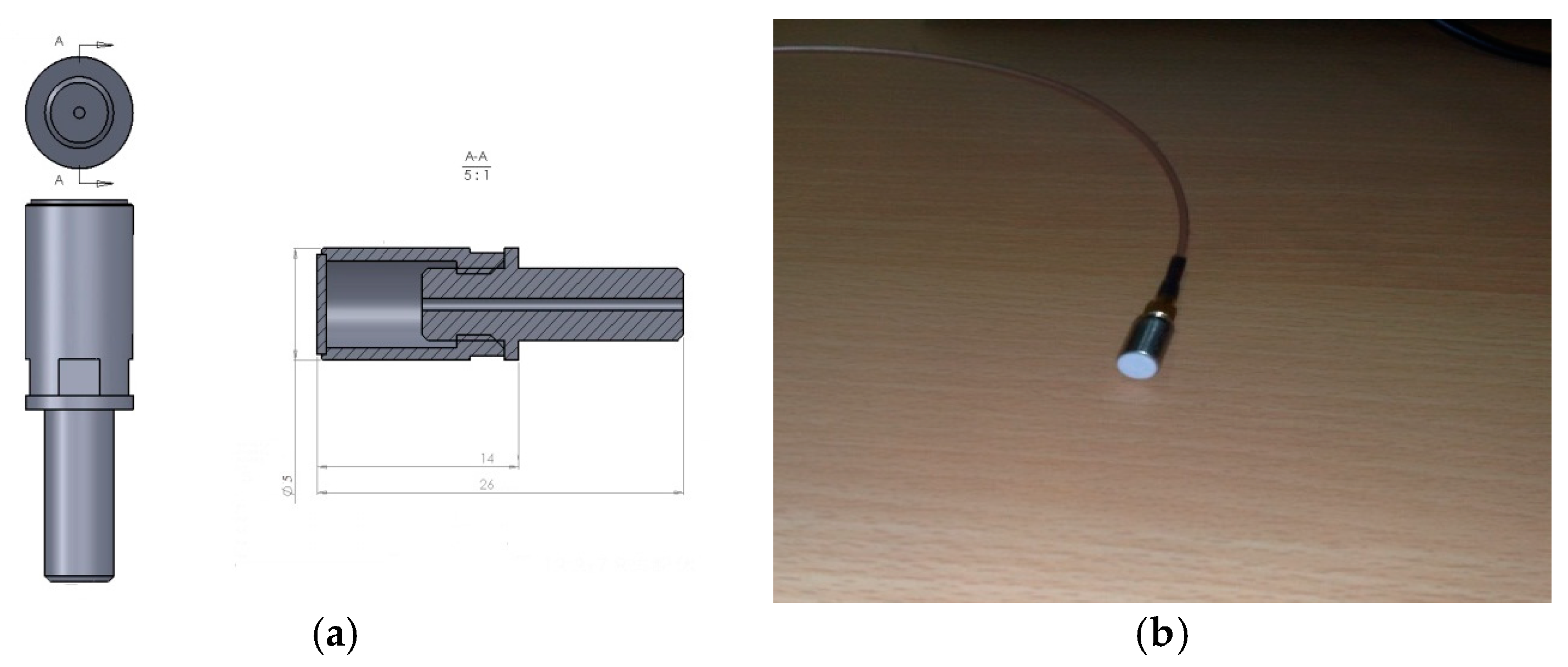
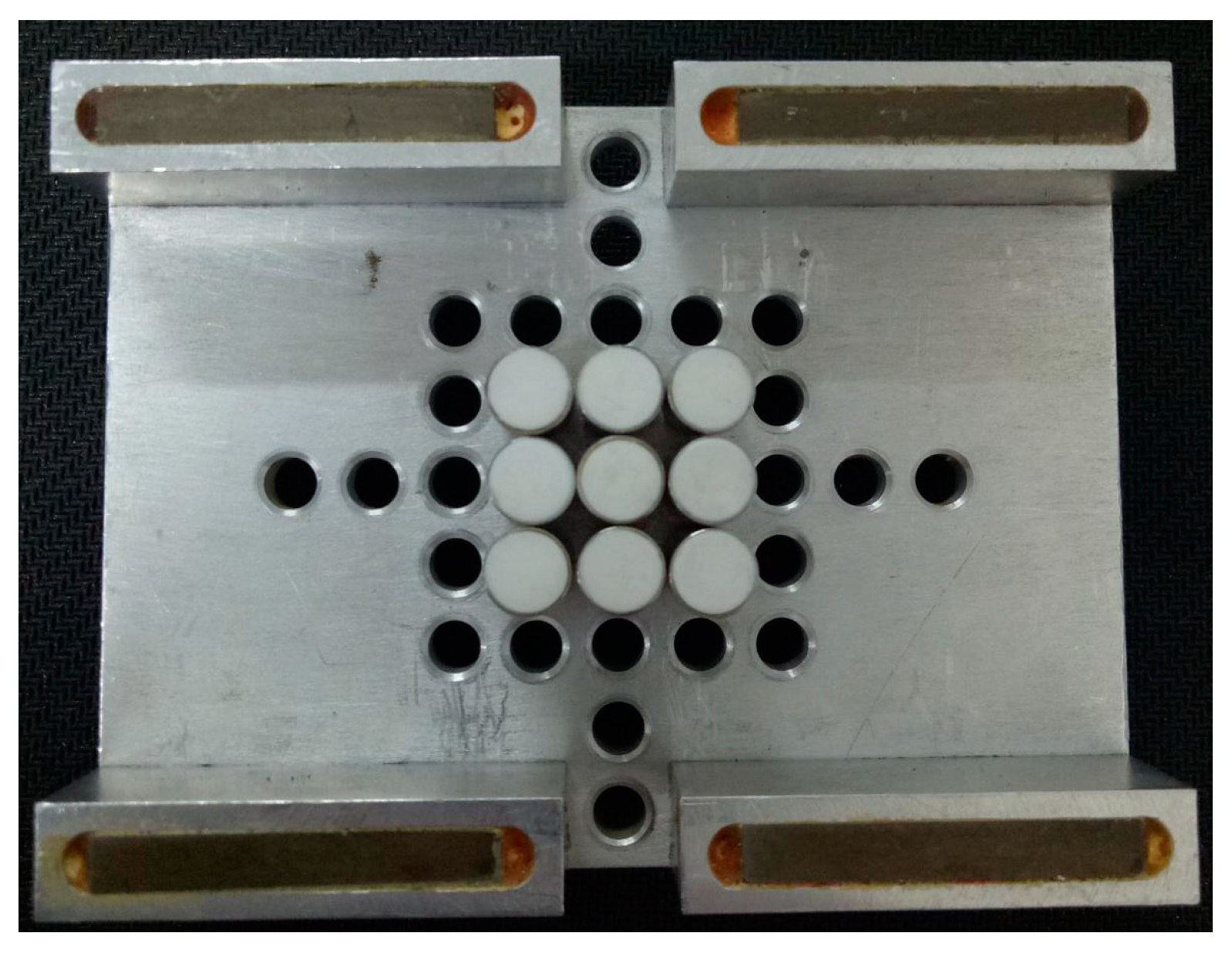
4.1. Experimental System
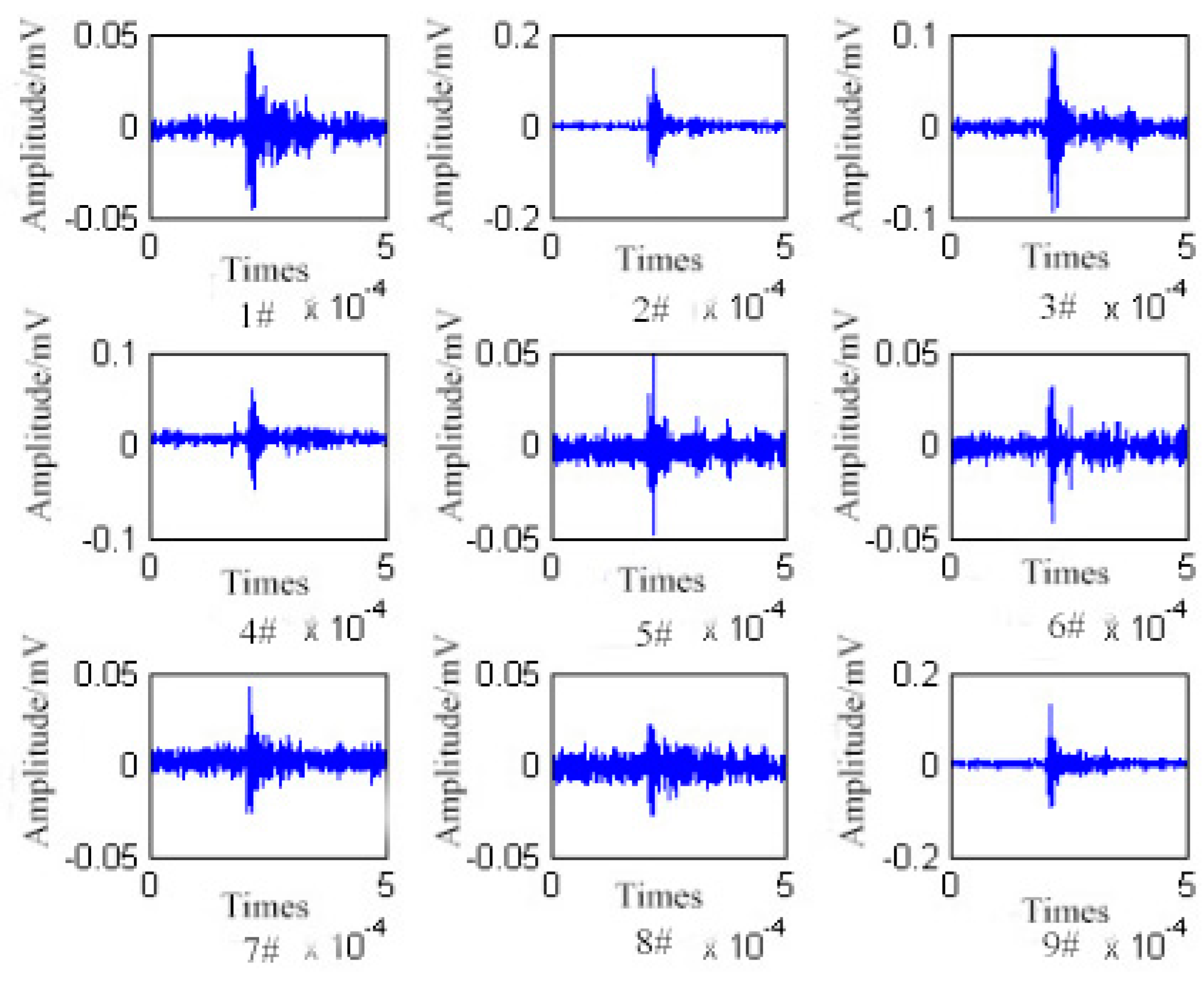
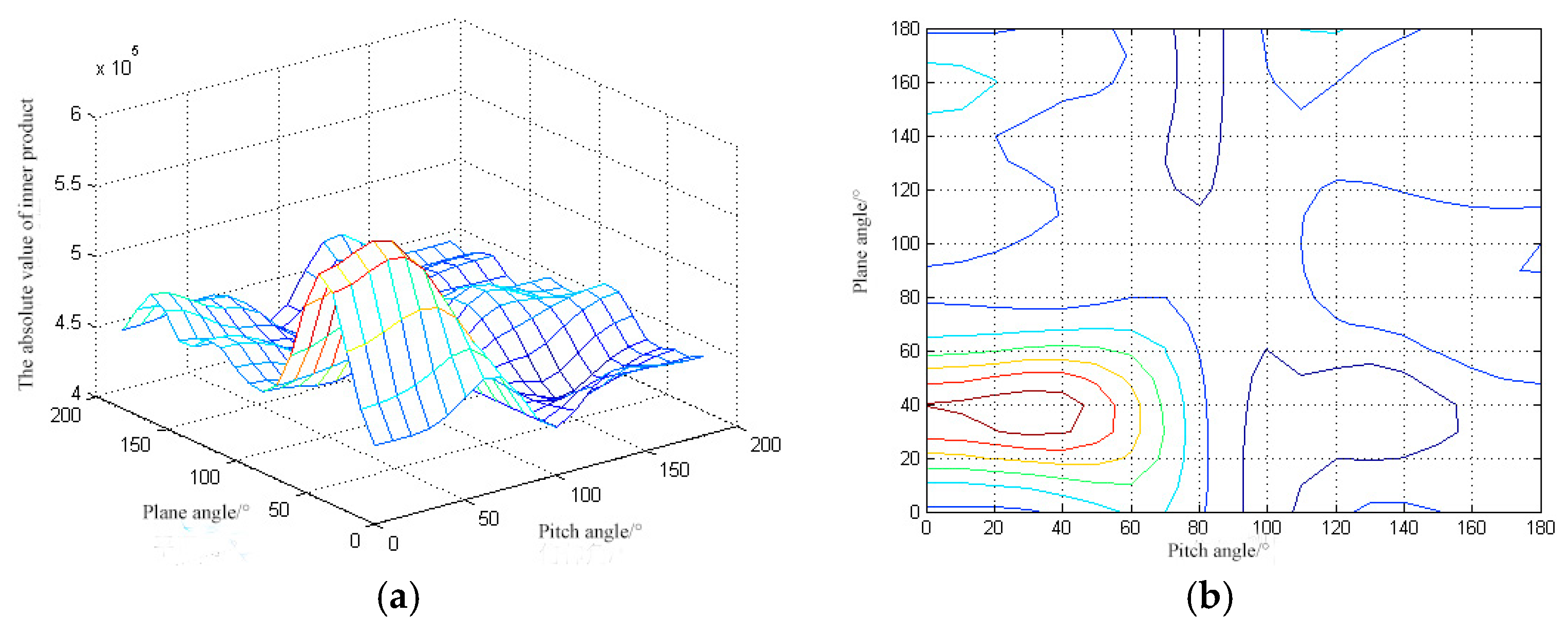
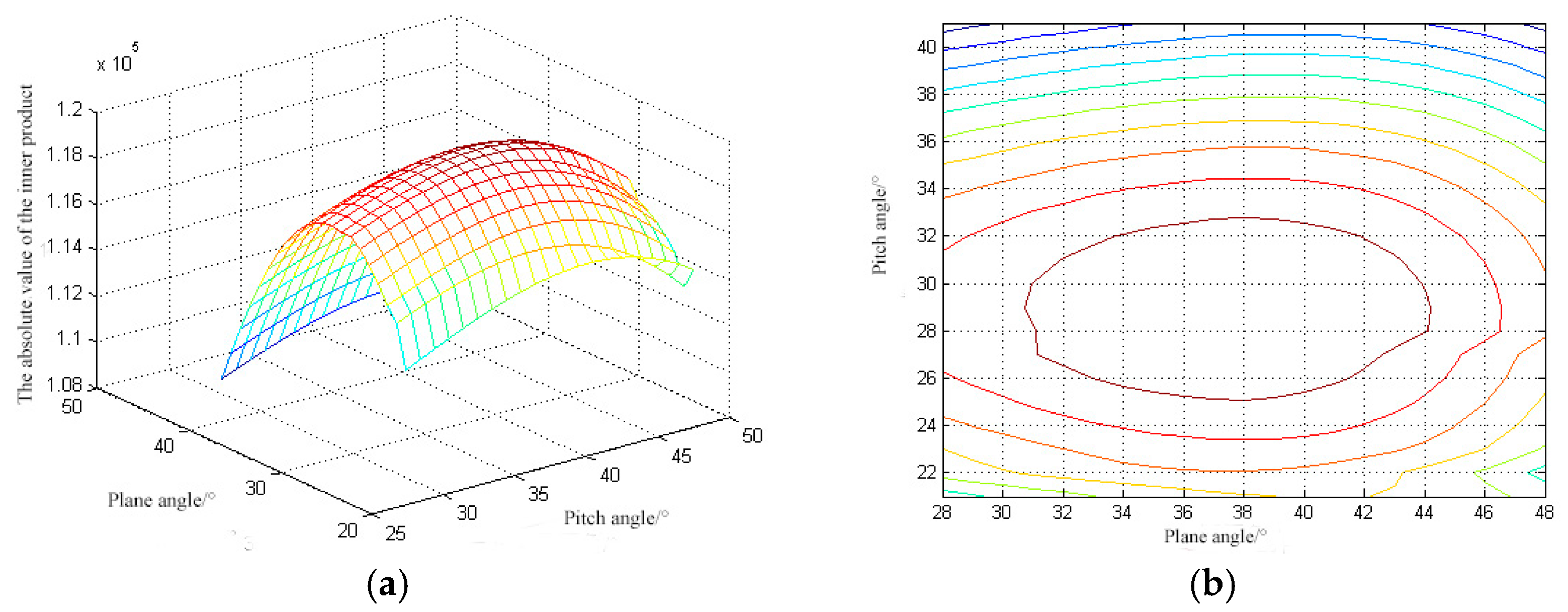
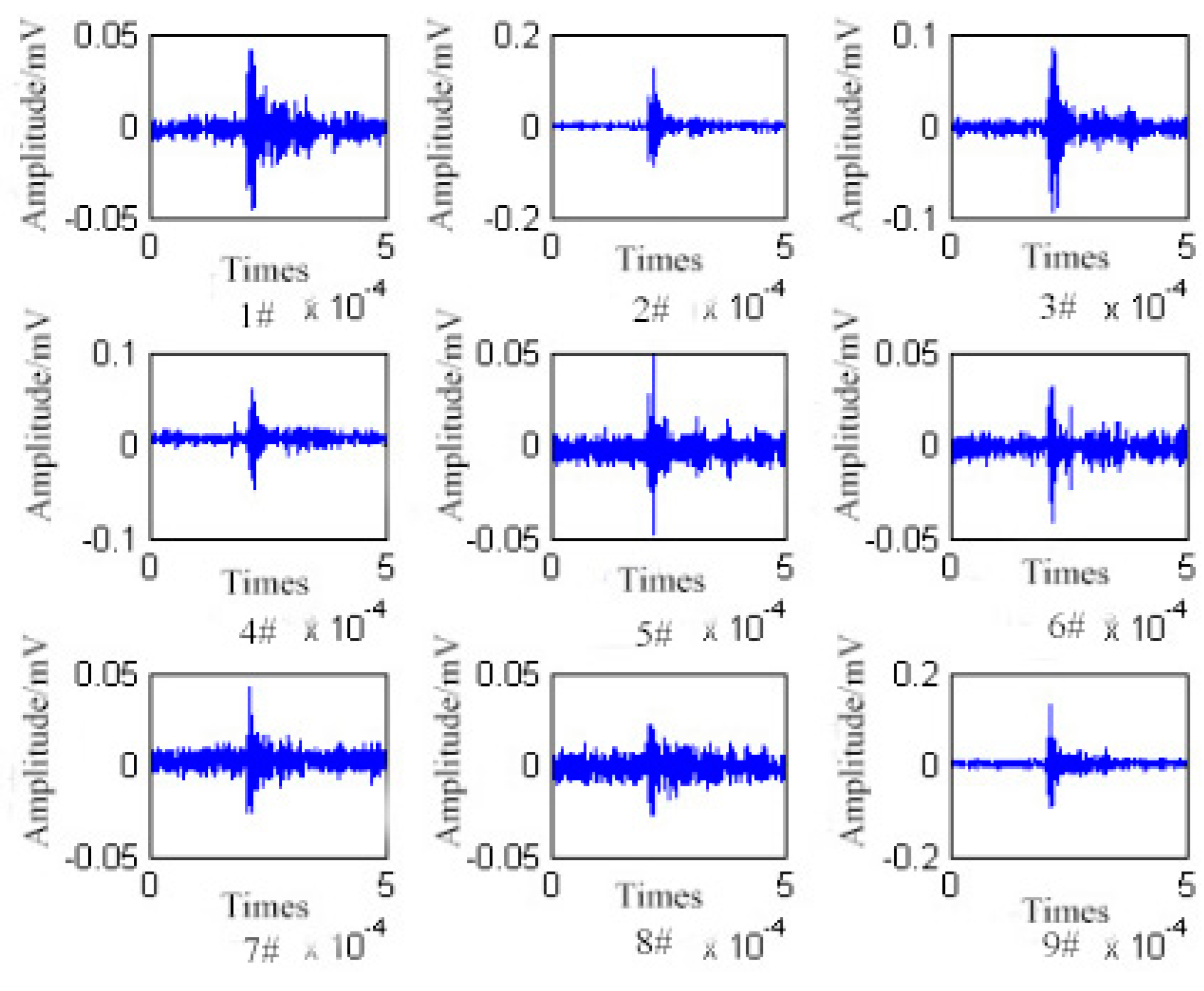
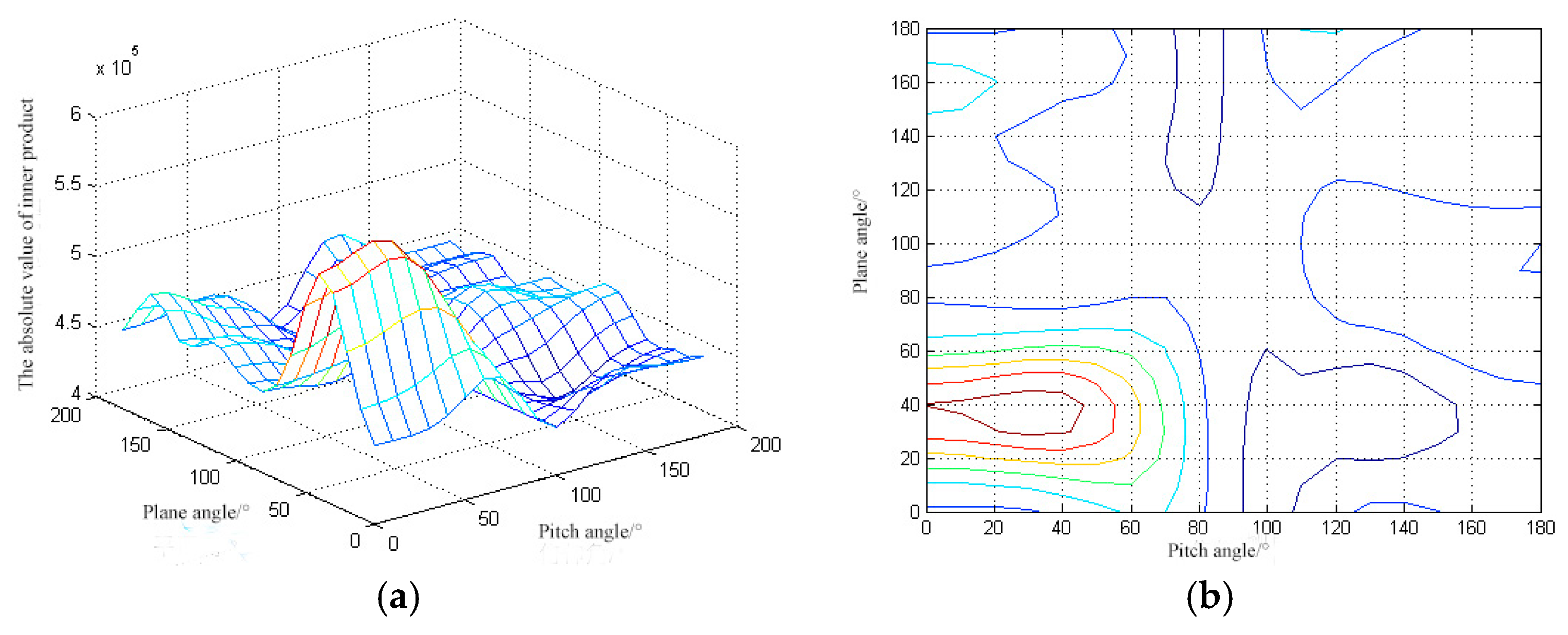
4.2. Direction Finding and Location
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Qiu, C.R.; Wang, N.Q. Electrician Equipment Local Discharge and Its Test Technology; Mechanical Industry Publishing House: Beijing, China, 1994. [Google Scholar]
- Sikorski, W.; Walczak, K.; Przybylek, P. Moisture migration in an oil-paper insulation system in relation to online partial discharge monitoring of power transformers. Energies 2016, 9, 1082. [Google Scholar] [CrossRef]
- Xu, Y.; Liu, W.D.; Gao, W.S.; Zhang, X.C.; Wang, Y. Comparison of PD Detection Methods for Power Transformers-their Sensitivity and Characteristics in Time and Frequency Domain. IEEE Trans. Dielectr. Electr. Insul. 2016, 23, 2925–2932. [Google Scholar] [CrossRef]
- Polak, F.; Sikorski, W.; Siodla, K. Location of partial discharges sources using sensor arrays. In Proceedings of the 2014 International Conference on High Voltage Engineering and Application (ICHVE), Poznan, Poland, 8–11 September 2014; pp. 1–4. [Google Scholar]
- Luo, Y.F.; Li, Y.M.; Liu, L.C. Simulation of PD location method in oil based on UHF and ultrasonic phased array receiving theory. In Proceedings of the 2004 IEEE International Conference on Solid Dielectrics, Toulouse, France, 5–9 July 2004. [Google Scholar]
- Luo, R.C.; Li, W.G.; Li, C.R. A multi-target method to locate internal partial discharge sources with in transformer based on array signal. Process. Power Syst. Technol. 2006, 30, 65–69. [Google Scholar]
- Xie, Q.; Li, T.; Tao, J.H.; Liu, X.Y.; Liu, D.; Xu, Y.Q. Comparison of the acoustic performance and positioning accuracy of three kinds of planar partial discharge ultrasonic array sensors. IET Radar Sonar Navig. 2016, 10, 166–173. [Google Scholar] [CrossRef]
- Hoshi, T.; Ochiai, Y.; Rekimoto, J. Three-dimensional non-contact manipulation by opposite ultrasonic phased arrays. Jpn. J. Appl. Phys. 2014, 53, 07KE07. [Google Scholar] [CrossRef]
- Schmidt, R.O. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Zoltowski, M.D.; Silverstein, S.D.; Mathews, C.P. Beamspace ROOT-MUSIC for minimum redundancy linear arrays. IEEE Trans. Signal. Process. 1993, 41, 2502–2507. [Google Scholar] [CrossRef]
- Wu, J.F.; Yang, S.K.; Xie, H.L.; Mao, W.M. Simulation study on partial discharge orientation estimation of power transformer. J. North China Electr. Power Univ. 2007, 6, 15–18. [Google Scholar]
- Li, Y.-Q.; Xie, Q.; Wang, N.; Xiang, X.; Lu, F.C. Simulation of PD location in power transformer based on root multiple signal classification method. In Proceedings of the 2009 IEEE 9th International Conference on the Properties and Applications of Dielectric Materials, Harbin, China, 19–23 July 2009. [Google Scholar]
- Xie, Q.; Wang, N.; Xiang, X.; Li, Y.-Q.; Lu, F.C. Research on ultrasonic locating of partial discharge in power transformer based on modified multiple signal. In Proceedings of the 2009 Asia-Pacific Power and Energy Engineering Conference, Wuhan, China, 27–31 March 2009. [Google Scholar]
- Roy, R.; Kailath, T. ESPRIT–Estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Roy, R.; Paulraj, A.; Kailath, T. ESPRIT–A subspace rotation approach to estimation of parameters of cisoids in noise. IEEE Trans. Acoust. Speech Signal Process. 1986, 34, 1340–1342. [Google Scholar] [CrossRef]
- Seo, B. The doubly smoothed maximum likelihood estimation for location-shifted semiparametric mixtures. Comput. Stat. Data Anal. 2017, 108, 27–39. [Google Scholar] [CrossRef]
- Lu, K.P.; Chang, S.T. Detecting change-points for shifts in mean and variance using fuzzy classification maximum likelihood change-point algorithms. J. Comput. Appl. Math. 2016, 308, 447–463. [Google Scholar] [CrossRef]
- Sun, L.; Wang, H.L.; Xiong, L.L. A novel subspace fitting method for DOA estimation based on bayesian compressive sensing. Signal Process. 2012, 28, 827–833. [Google Scholar]
- Mallat, S.; Zhang, Z. Matching pursuits with time-frequency dictionaries. IEEE Trans. Signal Process. 1993, 41, 3397–3415. [Google Scholar] [CrossRef]
- Mallat, S.; Zhang, Z. Adaptive time-frequency decomposition with matching pursuits. In Proceedings of the 1992 IEEE-SP International Symposium on Time-Frequency and Time-Scale Analysis, Victoria, BC, Canada, 4–6 October 1992. [Google Scholar]
- Xie, Q.; Wang, Y.Y.; Li, T. Application of signal sparse decomposition in the detection of partial discharge by ultrasonic array method. IEEE Trans. Dielectr. Electr. Insul. 2015, 22, 2031–2040. [Google Scholar] [CrossRef]
- Cheng, S.Y. Acoustic Performance Evaluation and Sparse Design of Partial Discharge Ultrasonic Array Sensor. Ph.D. Thesis, North China Electric Power University, Beijing, China, 2014. [Google Scholar]
- Song, S.P.; Li, Y.X.; Dogandzic, A. Atomic Library Optimization for Pulse Ultrasonic Sparse Signal Decomposition and Reconstruction. In Proceedings of the 42nd Annual Review of Progress in Quantitative Nondestructive Evaluation (QNDE), Minneapolis, MN, USA, 26–31 July 2015. [Google Scholar]
- Determe, J.F.; Louveaux, J.; Jacques, L.; Horlin, F. On the Noise Robustness of Simultaneous Orthogonal Matching Pursuit. IEEE Trans. Signal. Process. 2017, 65, 864–875. [Google Scholar] [CrossRef]
- Huber, P.J. Projection pursuit. Ann. Stat. 1985, 13, 435–475. [Google Scholar] [CrossRef]
- Klinke, S.; Grassmann, J. Projection pursuit regression. J. Am. Stat. Assoc. 2012, 76, 817–823. [Google Scholar]
- Hao, S.P. Chaotic Monkey Algorithm and Its Application. Master’s Thesis, Tianjin University, Tianjin, China, 2010. [Google Scholar]
- Li, J.S.; Luo, Y.F.; Li, J.H.; Li, Y.M. The study of phased-ultrasonic receiving-planar array transducer for PD location in power transformer. Electr. Rev. 2011, 324–328. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | Sensor Position | Theoretical Angle | Direction Angle | The Three Array Positioning Result | Error |
|---|---|---|---|---|---|
| (cm) | (°) | (°) | (cm) | (cm) | |
| 1 | (45, 0, 20) | (36.9, 32.0) | (35.7, 31.2) | (67.7, 17.6, 63.3) | 5.0 |
| (80, 0, 20) | (135.0, 27.9) | (134.0, 26.7) | |||
| (0, 30, 40) | (167.0, 73.3) | (167.6, 74.6) | |||
| 2 | (55, 0, 35) | (56.3, 35.8) | (57.2, 35.0) | (62.1, 12.0, 57.0) | 5.1 |
| (0, 25, 35) | (163.0, 69.8) | (162.1, 68.6) | |||
| (45, 0, 20) | (36.9, 32.0) | (35.8, 31.0) | |||
| 3 | (0, 45, 45) | (155.2, 78.2) | (154.3, 79.4) | (62.3, 18.8, 62.4) | 5.3 |
| (70, 0, 45) | (108.3, 46.5) | (109.5, 47.0) | |||
| (45, 0, 40) | (56.3, 51.4) | (55.6, 52.5) | |||
| 4 | (55, 0, 45) | (56.3, 50.3) | (55.2, 51.1) | (61.6, 17.2, 63.7) | 5.5 |
| (0, 40, 25) | (158.9, 63.3) | (159.8, 64.5) | |||
| (45, 0, 20) | (36.9, 32.0) | (37.8, 30.4) | |||
| 5 | (55, 0, 35) | (56.3, 35.8) | (55.6, 34.5) | (63.6, 12.2, 64.1) | 5.2 |
| (70, 0, 35) | (108.3, 32.3) | (107.1, 31.2) | |||
| (0, 40, 20) | (158.9, 60.1) | (158.1, 61.4) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, S.; Zhang, Y.; Xie, Q.; Kan, Y.; Li, S.; Liu, D.; Lü, F. Research on Partial Discharge Source Localization Based on an Ultrasonic Array and a Step-by-Step Over-Complete Dictionary. Energies 2017, 10, 593. https://doi.org/10.3390/en10050593
Gao S, Zhang Y, Xie Q, Kan Y, Li S, Liu D, Lü F. Research on Partial Discharge Source Localization Based on an Ultrasonic Array and a Step-by-Step Over-Complete Dictionary. Energies. 2017; 10(5):593. https://doi.org/10.3390/en10050593
Chicago/Turabian StyleGao, Shuguo, Ying Zhang, Qing Xie, Yuqiang Kan, Si Li, Dan Liu, and Fangcheng Lü. 2017. "Research on Partial Discharge Source Localization Based on an Ultrasonic Array and a Step-by-Step Over-Complete Dictionary" Energies 10, no. 5: 593. https://doi.org/10.3390/en10050593