An S-Transform and Support Vector Machine (SVM)-Based Online Method for Diagnosing Broken Strands in Transmission Lines

Abstract
:
1. Instruction
2. Feature Extraction from Detection Signals Employing an S-Transform
2.1. S-Transform
2.1.1. The Continuous S-Transform


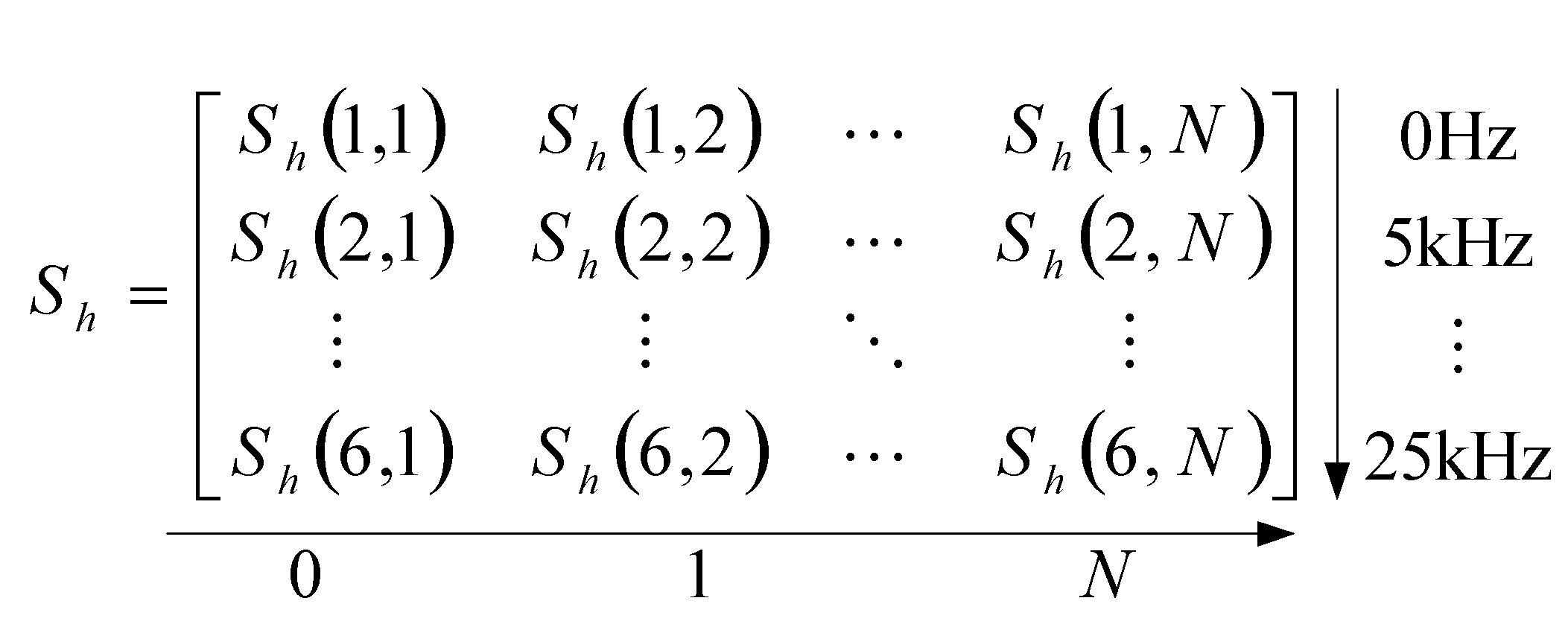
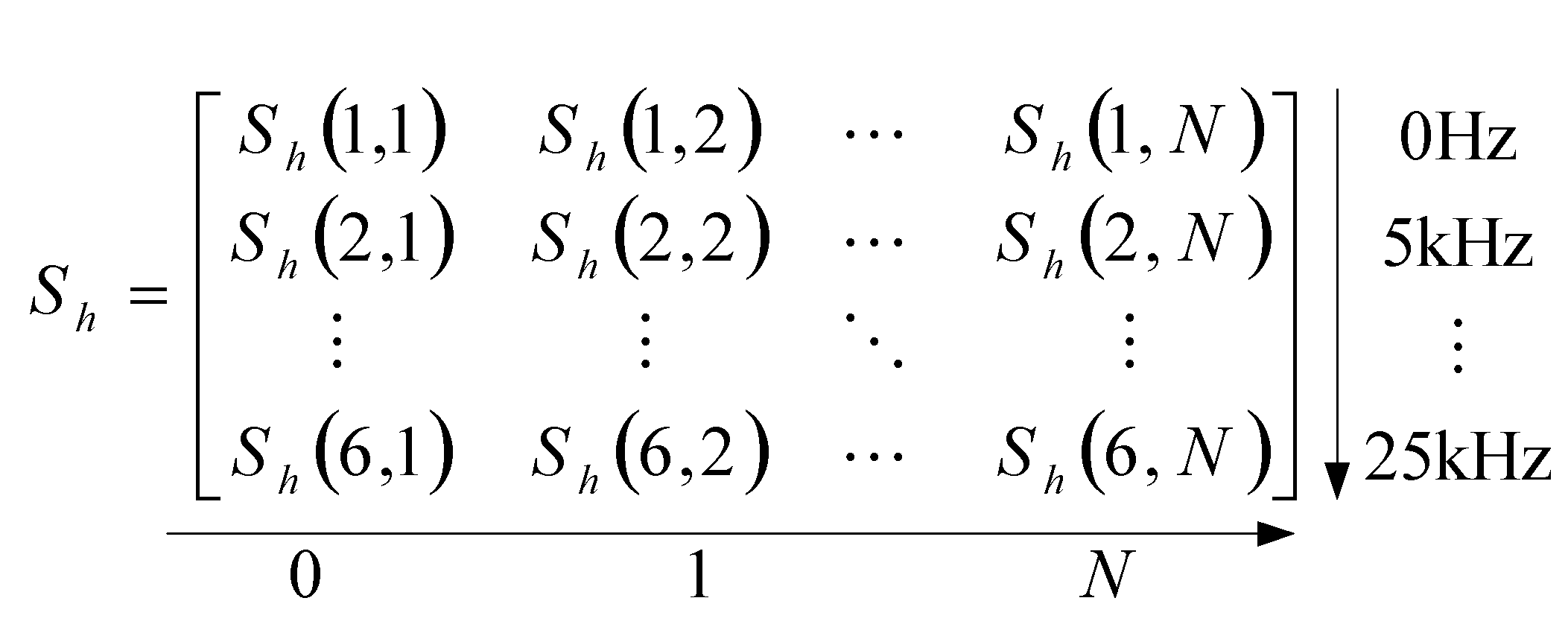
2.1.2. The Discrete S-Transform

2.2. Feature Extraction Based on the S-Transform
3. Multi-Classification Support Vector Machine
4. Diagnosis of Broken Strands in Transmission Lines by the Developed ECT
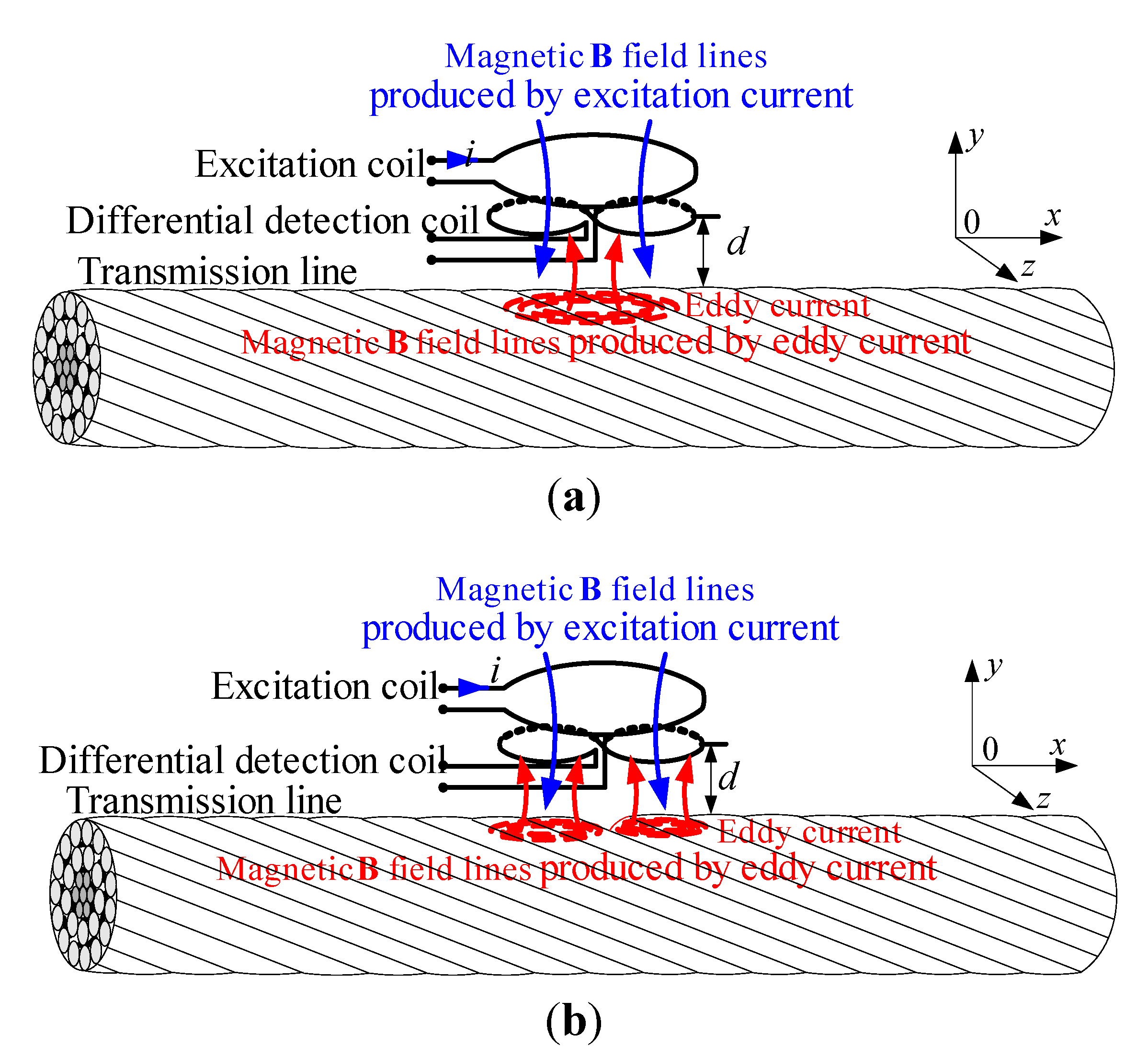
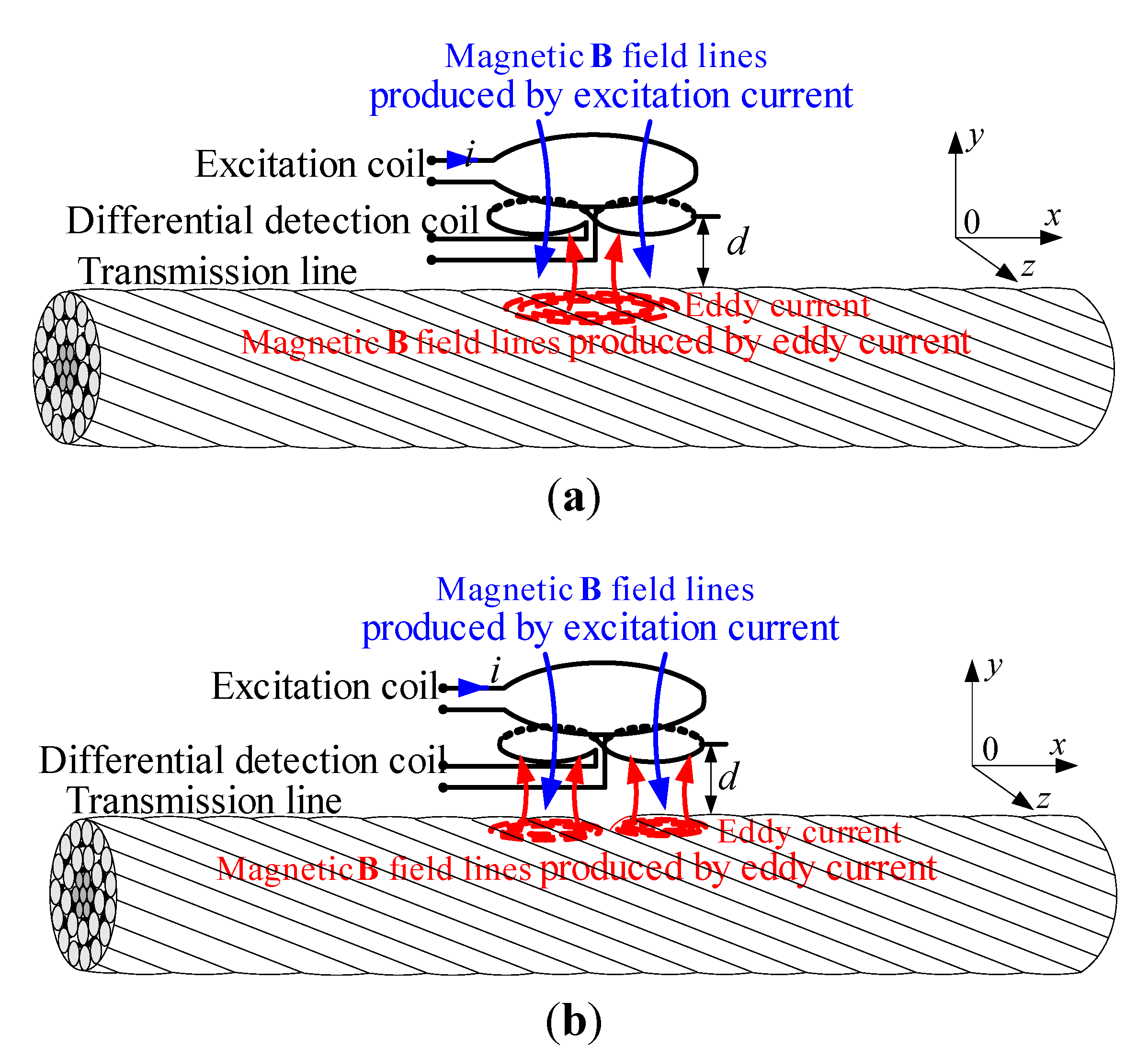
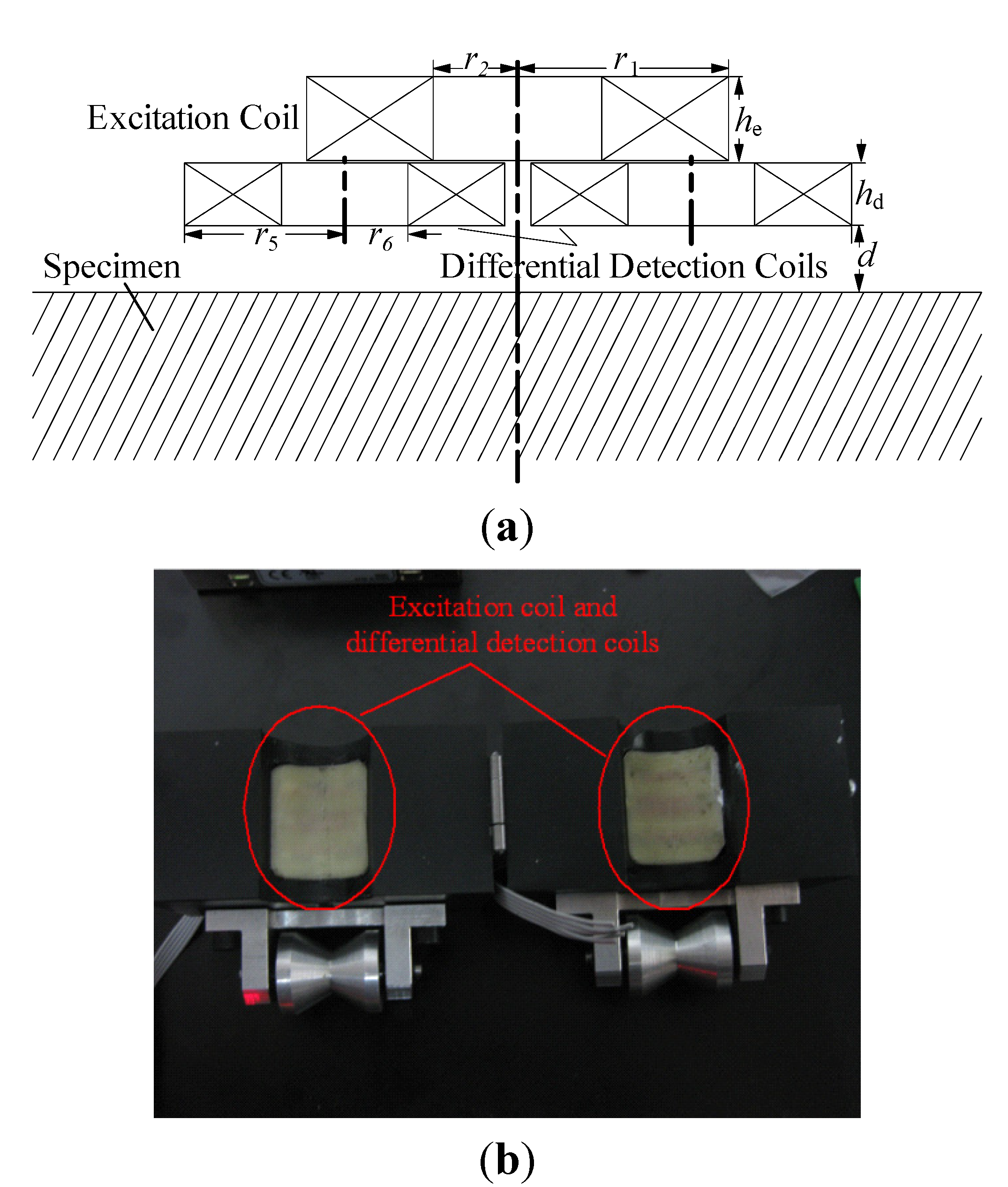
4.1. The Principle for Detecting Broken Strands in Transmission Lines by ECT
4.2. Structure of the ECT

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Sample | LGJ-240 |
|---|---|
| Material: aluminum |  |
| Diameter: Dc = 21.6 mm | |
| Diameter of single wire: da = 3.6 mm | |
| Number of aluminum stranded wires: 24 |
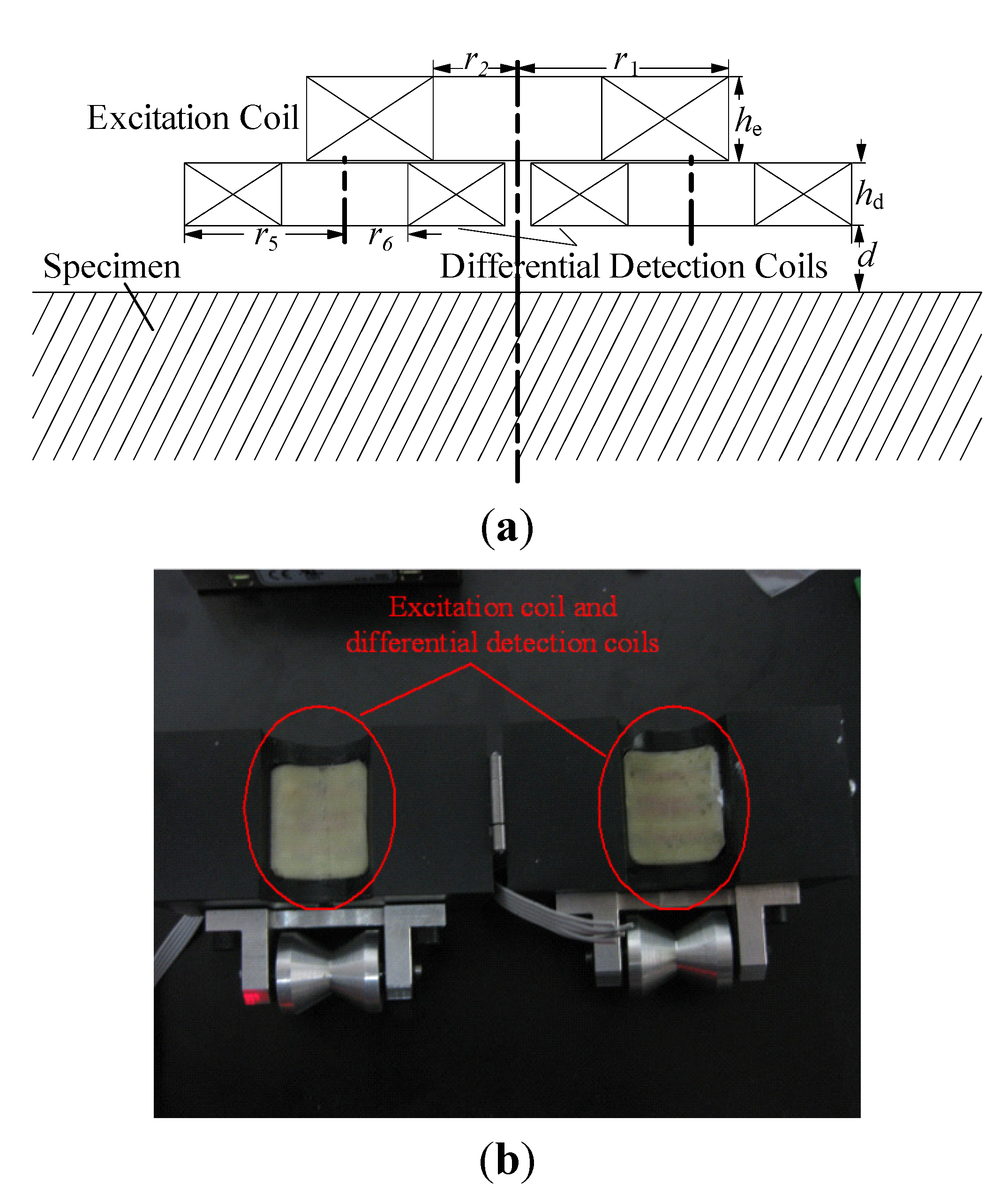
| External Radius | Inner Radius | Height | Turns | |
|---|---|---|---|---|
| Excitation Coil | r5 = 8 mm | r1 = 6 mm | he = 6 mm | 400 |
| Detection Coil | r2 = 4 mm | r6 = 5 mm | hd = 2 mm | 600 |
- (1)
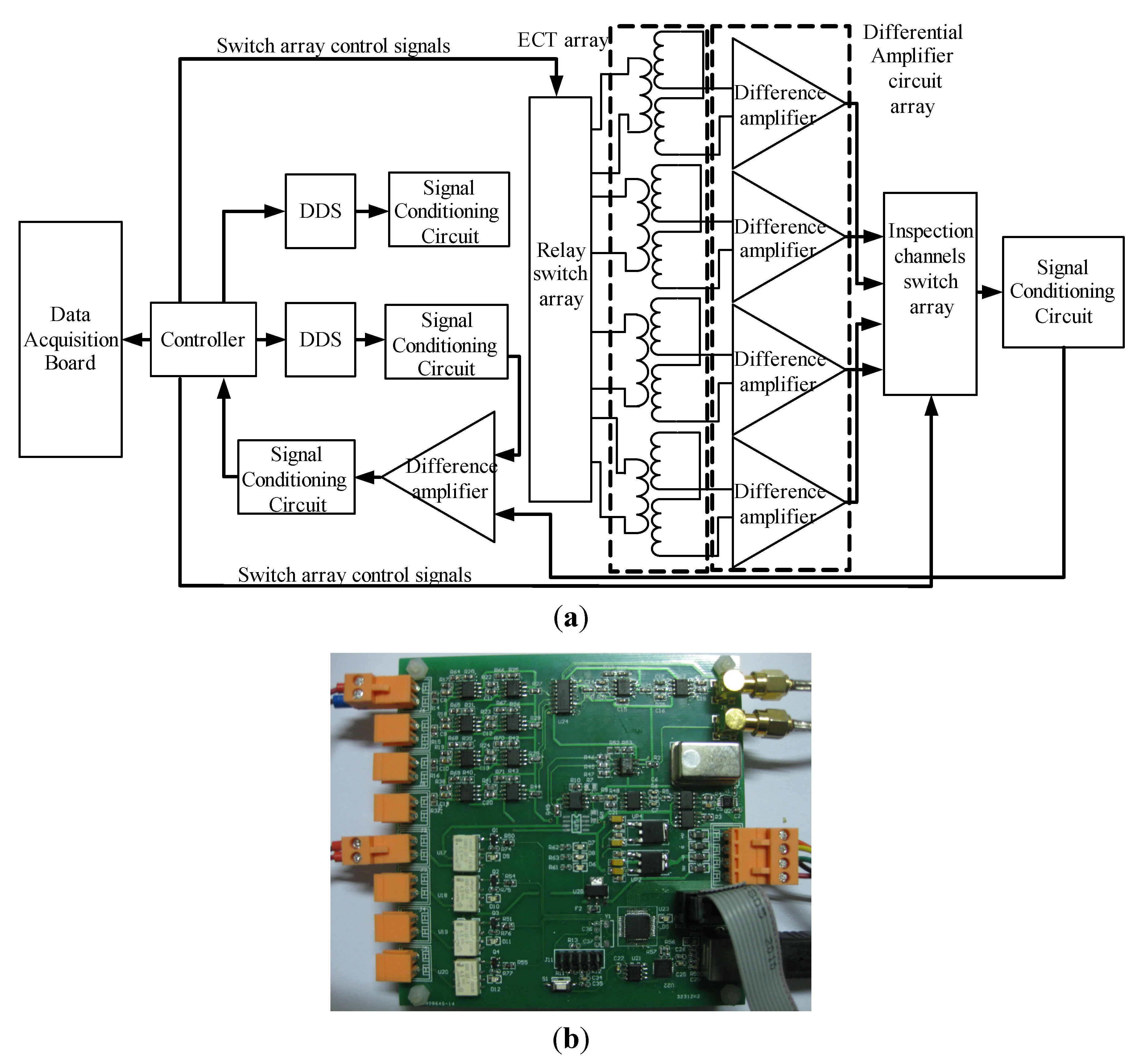
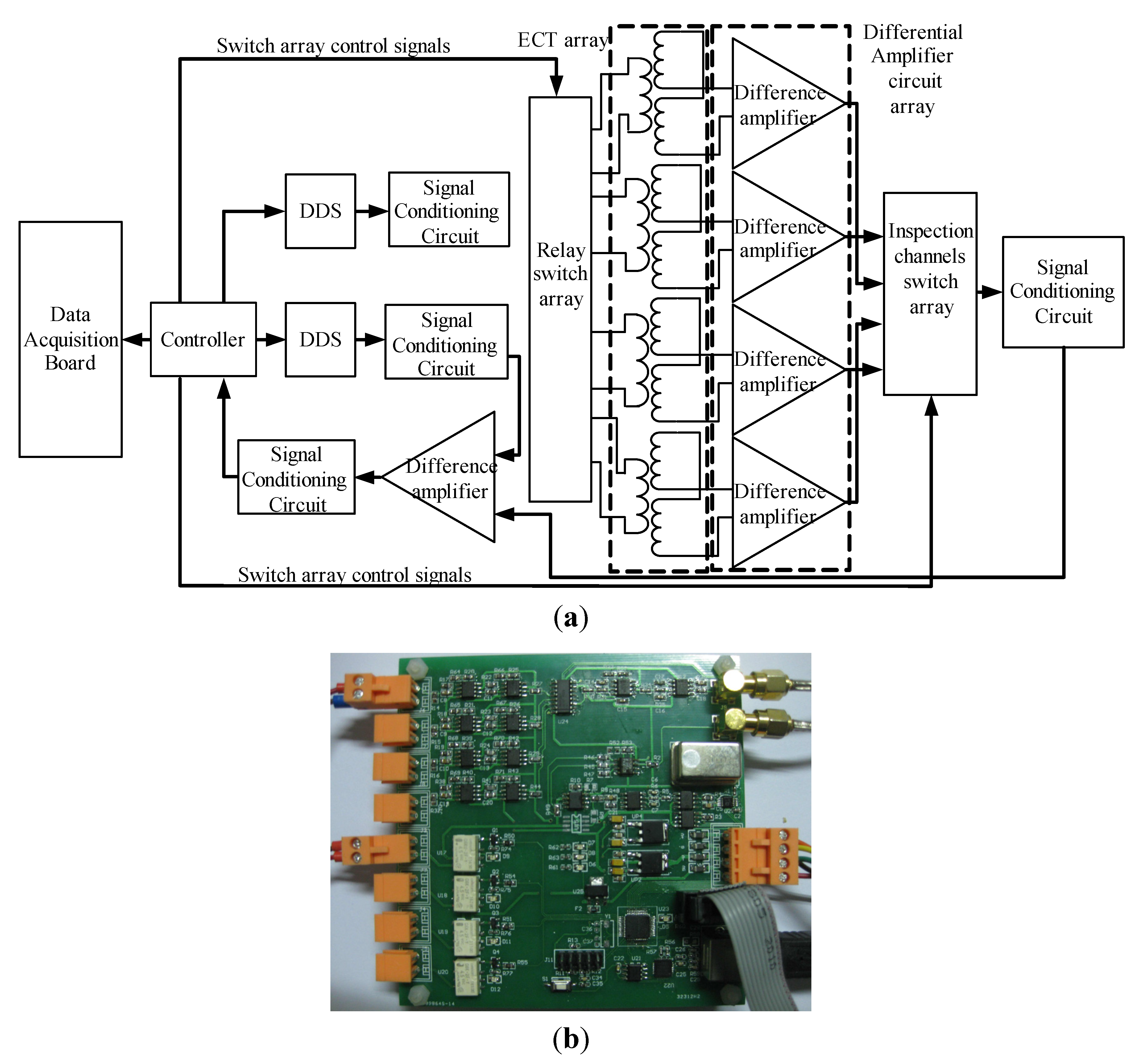
- DDS—To detect broken strands in cables, a highly stable energized signal is needed. As we know, the DDS technique involves changing digital signals into analogue signals using a digital-to-analog converter. Compared with other techniques, DDS has the advantages of shorter conversion time consumed, higher frequency resolution, and easier integration. The AD9833 DDS chip is a programmable signal generator, and communicates with the CPU by a serial peripheral interface (SPI).The frequency and phase can be adjusted on-line by the program. Superior signal source performance can be achieved by the AD9833 and a low pass filter, so DDS is applied in this study to produce a highly stable sinusoidal wave energized signal.
- (2)
- SCC—The SCC includes a filter circuit (FC), amplitude adjustment circuit (AAC) and power amplifier circuit (PAC). The amplitude of the energized signal generated by the DDS can be adjusted by the AAC. In this study, a 100 mA energized current can be obtained after being processed by the AAC. To drive the excitation coil, the energized current needs to be processed by the PAC before being applied to the excitation coil.
- (3)
- SOC—The induced main field of the differential detection coils can be offset by the SOC, which is composed of the DDS 2, and signal conditioning circuit 2. Then the sensitivity of the detection system can be enhanced.
- (4)
- CC—The controller circuit is composed of the C8051F340 CPU and the EP2C8Q208 field programmable gate array (FPGA). The FPGA is responsible for the logical control of the whole circuit, such as switching of multi-way switches. The CPU is in charge of controlling the DAC, communicating with the upper computer by SPI or universal serial bus (USB), and changing the frequency and phase of the energized current.
- (5)
- DAC—In this study, the detection signal is collected by a PCI-5153 DAC developed by National Instruments Inc. The sampling rate is 1 M/s.
- (6)
- DA—The DA can amplify the detection signals coming from the sub-differential detection coils, which are used to receive the magnetic field variation information.
- (7)
- RSA—The excitation coils of ECT probes can be energized with the AC current selectively by an RSA under the control of the CC.
- (8)
- ICSA—The amplified detection signal is sent to the next SCC through the ICSA under the control of the CC.
4.3. Flow of Identifying Broken Strands in Transmission Line
- (1)
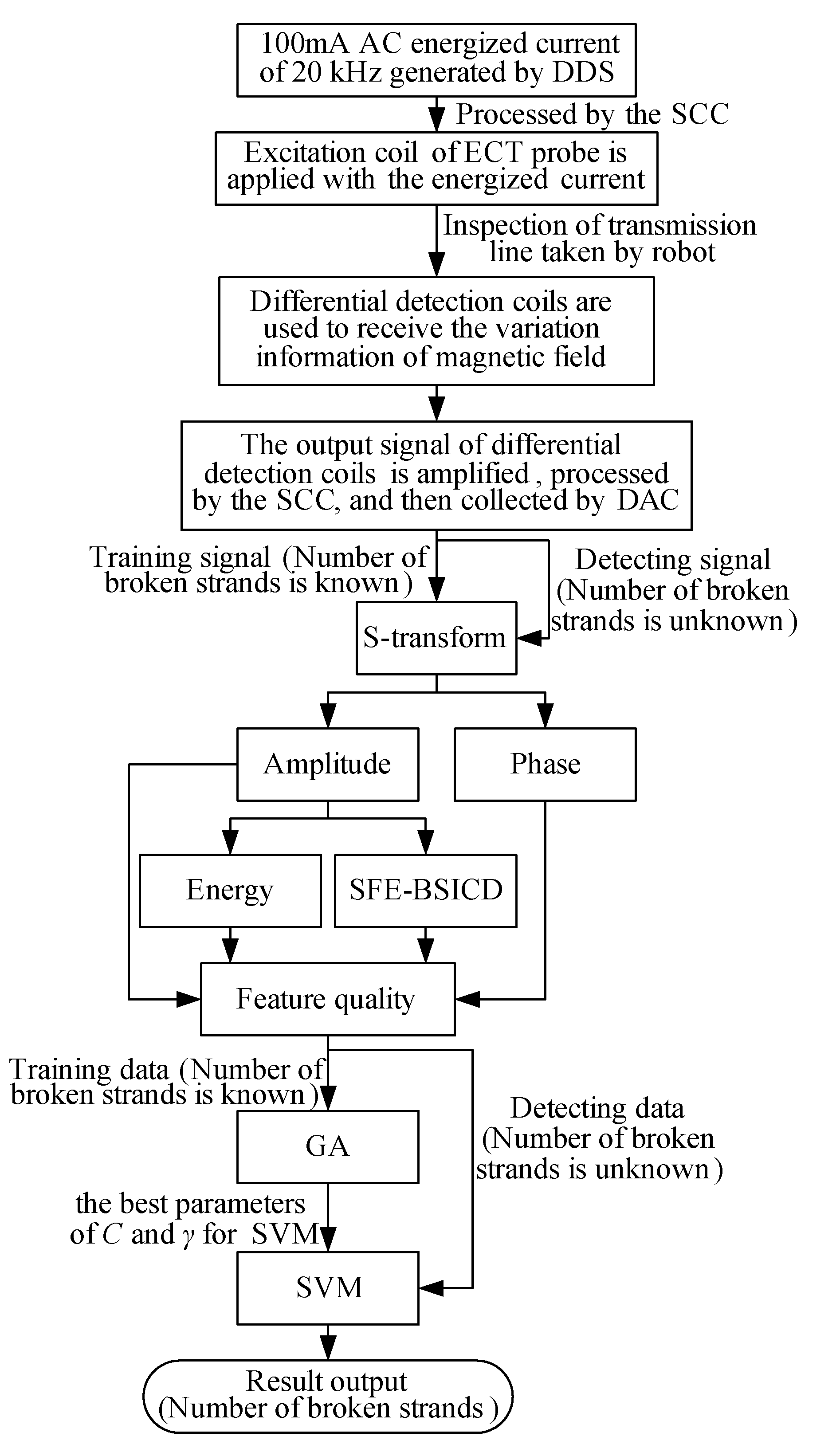
- The ECT parameters are first determined according to the specific type of transmission line. The 100 mA AC energized current of 20 kHz is generated by the DDS.
- (2)
- The energized current after being processed by the SCC is then applied to the excitation coil. When the excitation coil with the AC energized current carried by robot is over an inspected transmission line, an eddy current is induced on the surface of conductor. The amplitude, phase and flow direction of this eddy current varies with the performance of the cable.
- (3)
- The differential detection coils are separated from the excitation coil, and only used to receive the magnetic field variation information. If the inspected transmission line is flaw-free, the amount of magnetic flux passes through two sub-detection coils is the same, and there is no differential signal developed between two sub-detection coils. However, when one coil for detection is over a defect and the other is over good material, the amount of magnetic flux passes through two sub-detection coils is different, and a differential signal is produced correspondingly.
- (4)
- The output signal of the differential detection coils is amplified by the DA, processed by the SCC, and then collected by the DAC.
- (5)
- The amplitude and phase of the detection signals can be calculated by the S-transform. Then the energy E and the defined SFE-BSICD of the detection signals can be calculated correspondingly. Thus the amplitude, phase, energy E and defined SFE-BSICD of the detection signals are extracted as feature qualities for indentifying the broken strands in the transmission line.
- (6)
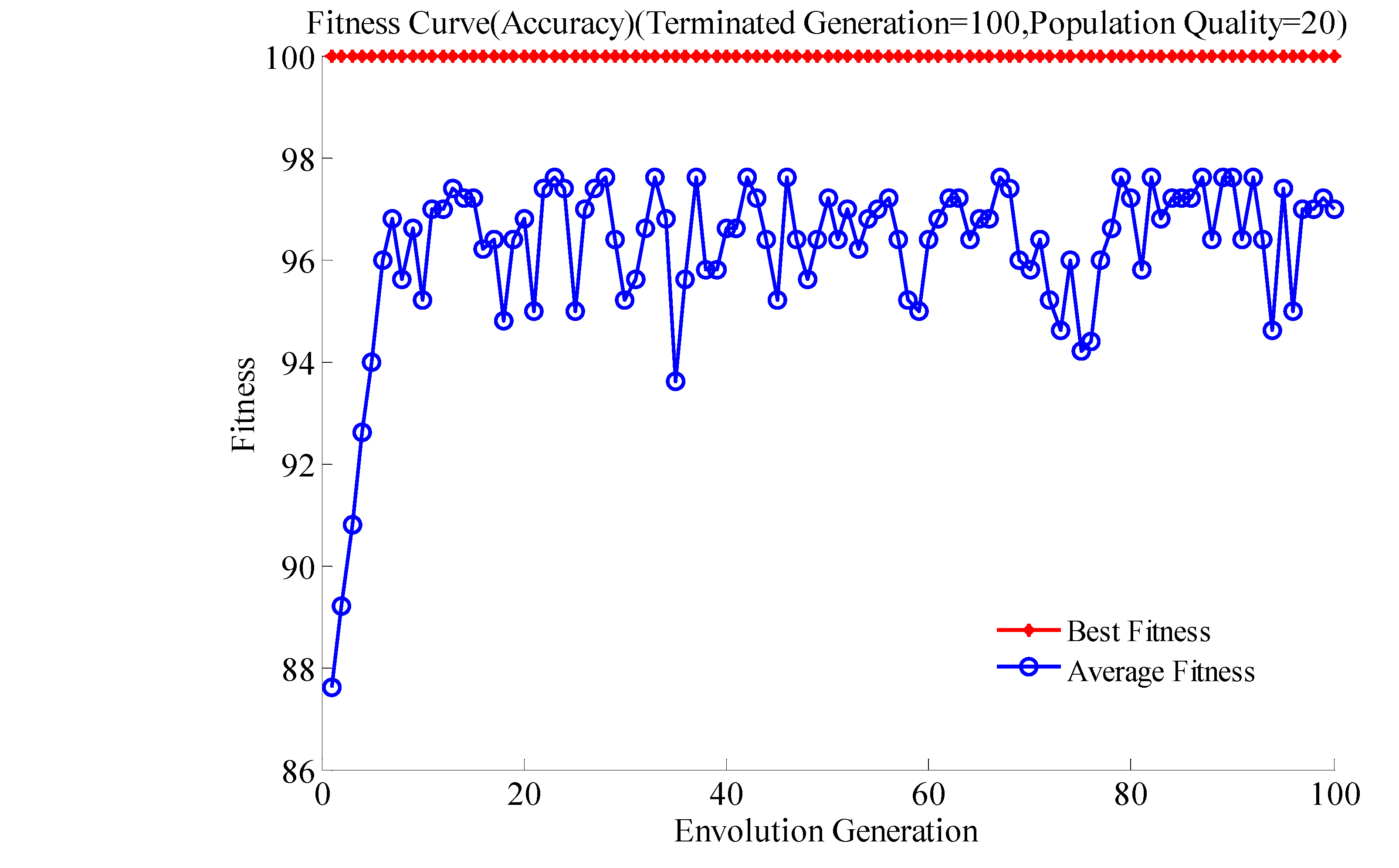
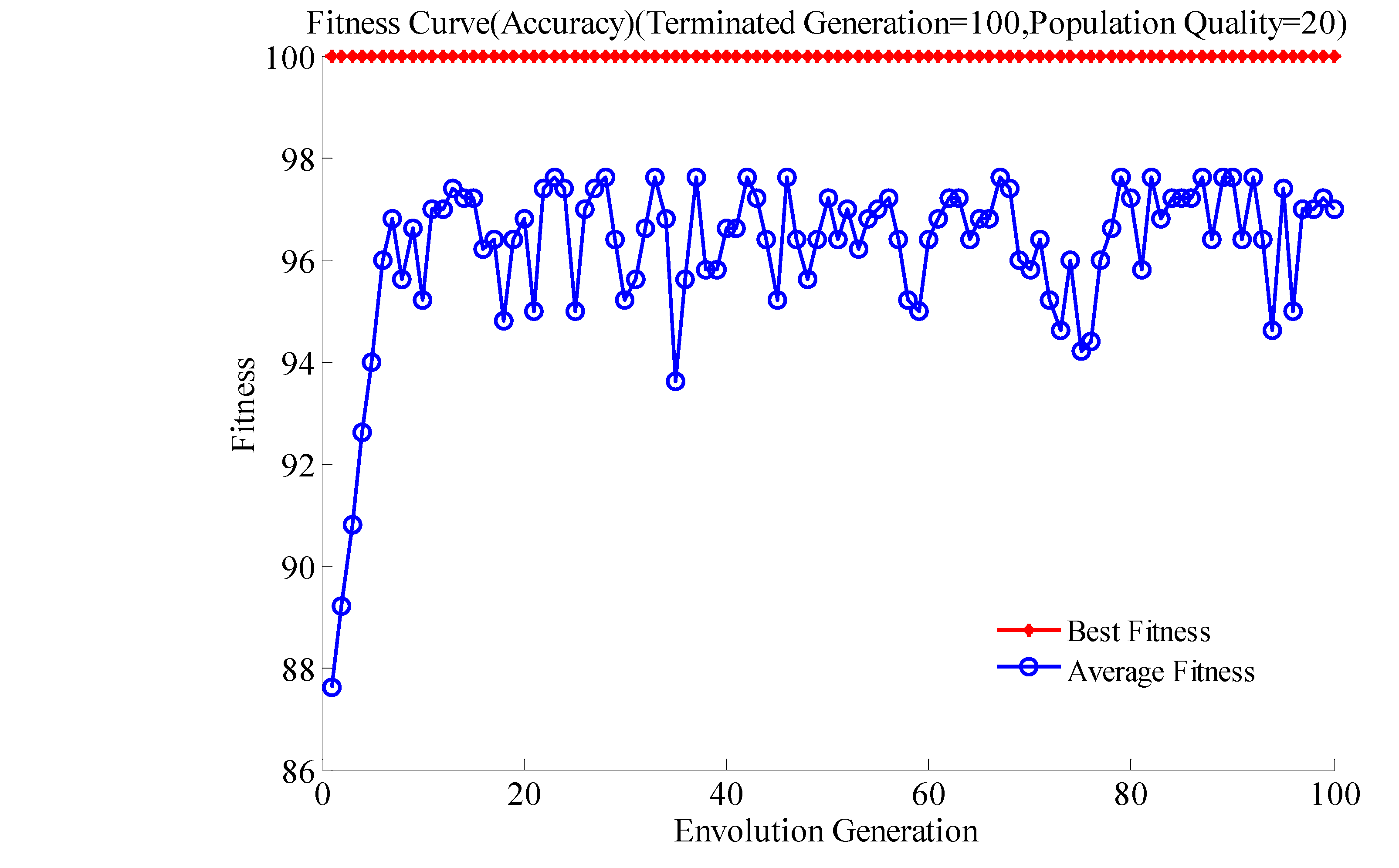
- Before detecting broken strands in an inspected transmission line, large amounts of experiments have been taken on the same type of transmission lines, and the number of broken strands in these experiments is known. The four feature qualities of the detection signals are extracted from the detection signals. A group of feature qualities are used to train the SVM. The best parameters of C and γ for SVM are determined by the GA, then the decision function for identifying the number of broken strands can be determined according to the formulas (21) and (22) and the SVM for identifying the number of broken strands is determined.
- (7)
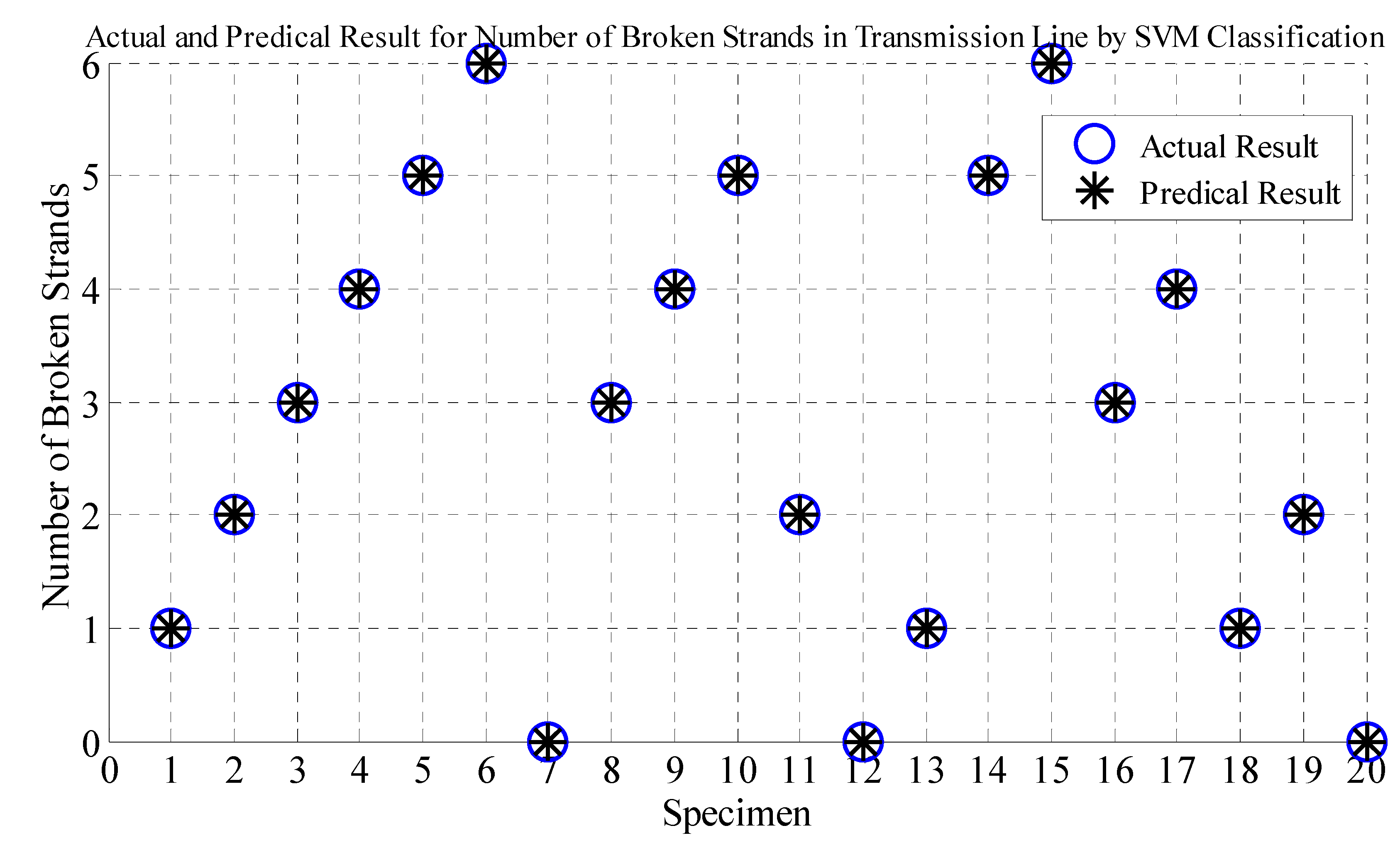
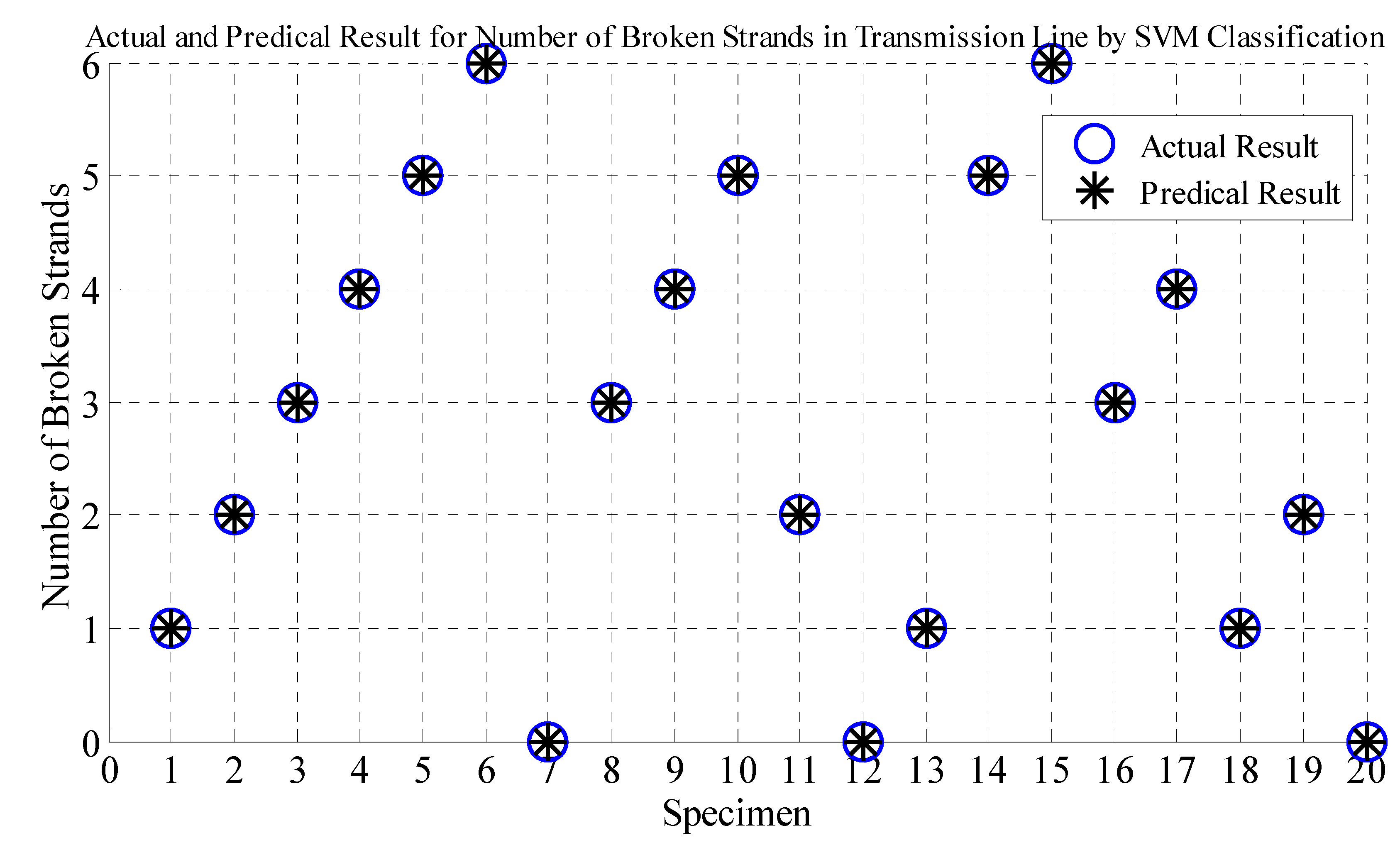
- After the SVM for identifying the number of broken strands has been trained, the ECT is taken by robot to detect broken strands in the tested transmission lines. A group of feature qualities of detection signals extracted from the detection signals are used to test the SVM. Then the number of broken strands in the inspected transmission line can then be determined.
5. Experimental Setup and Performance Evaluation
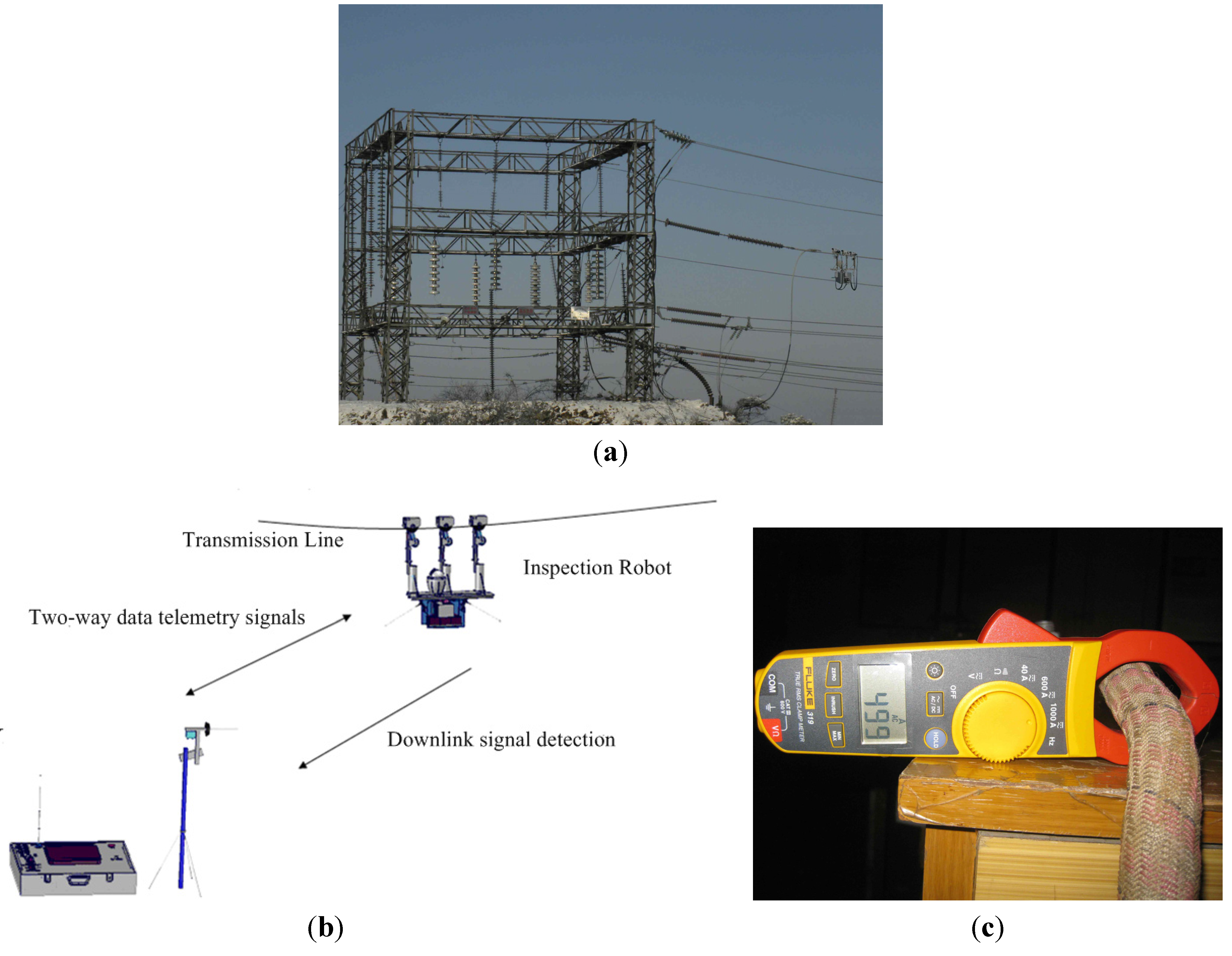
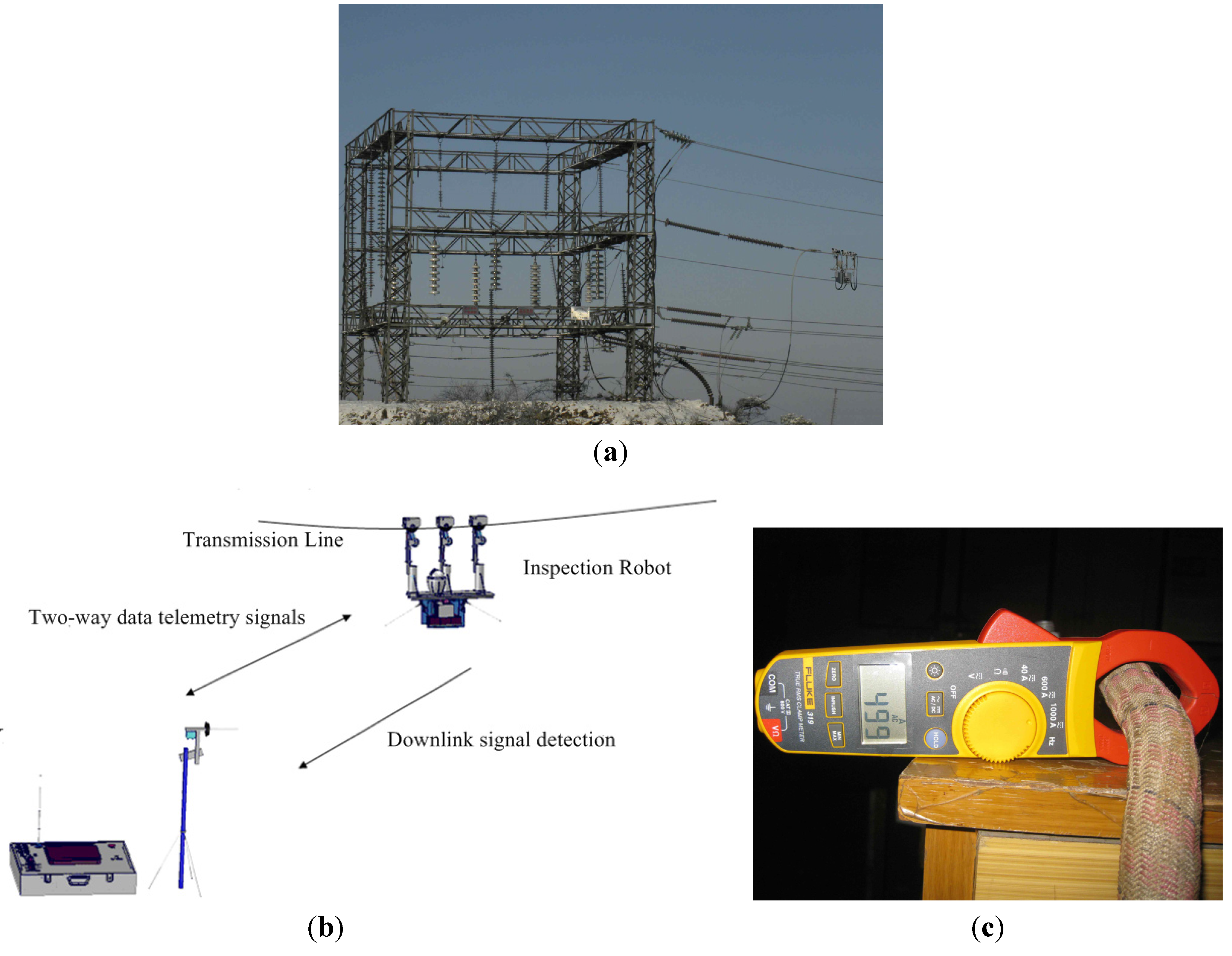
5.1. Field Experiment Platform
5.2. Performance Evaluation
- (1)
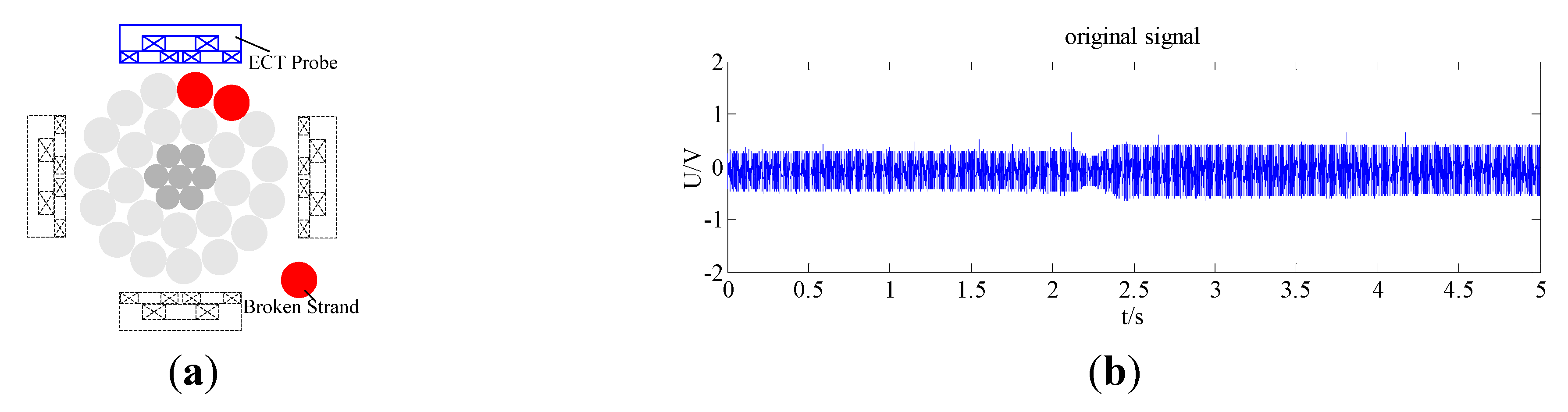
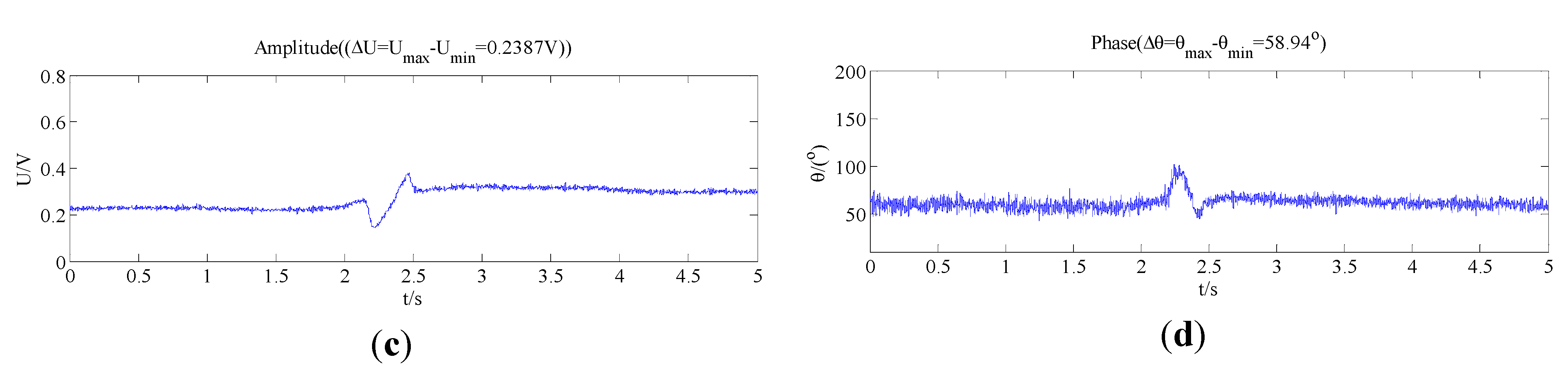
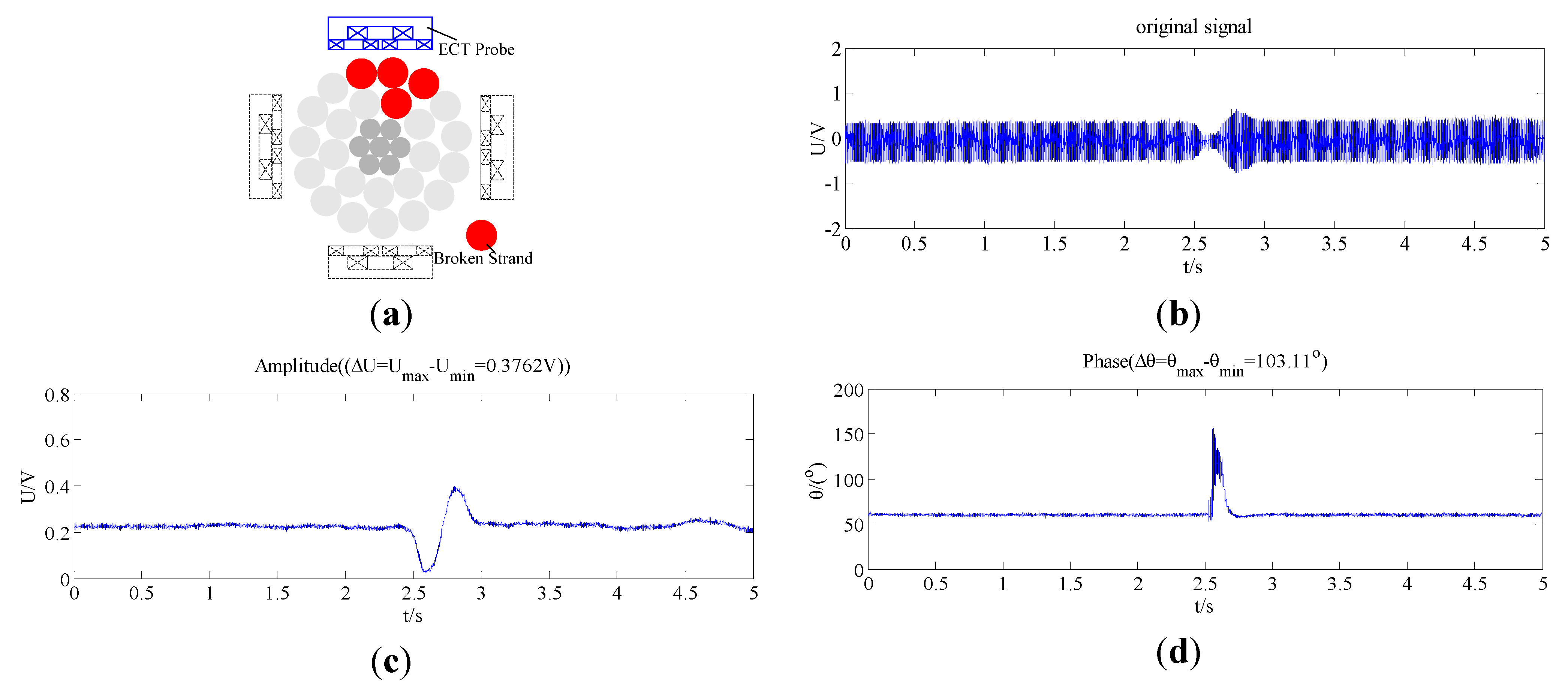
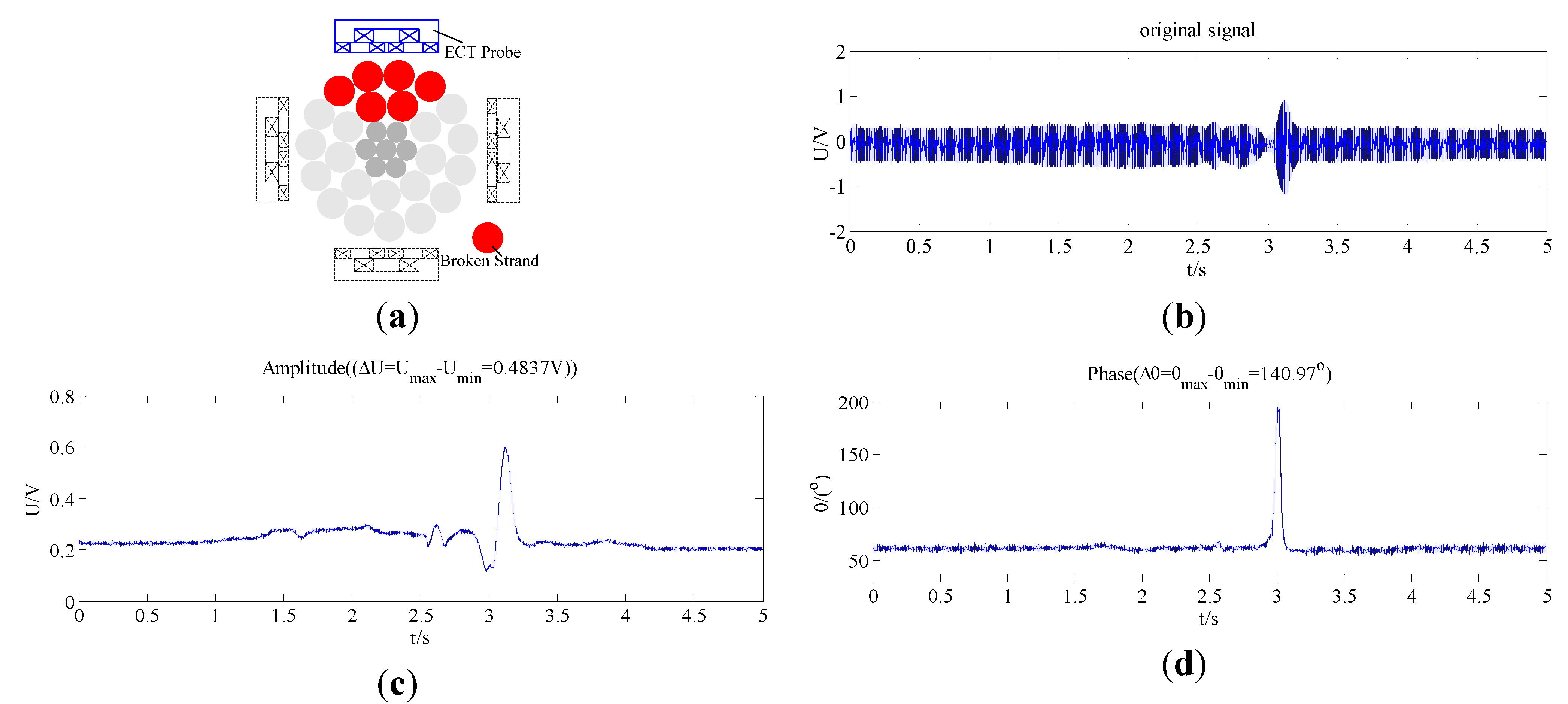
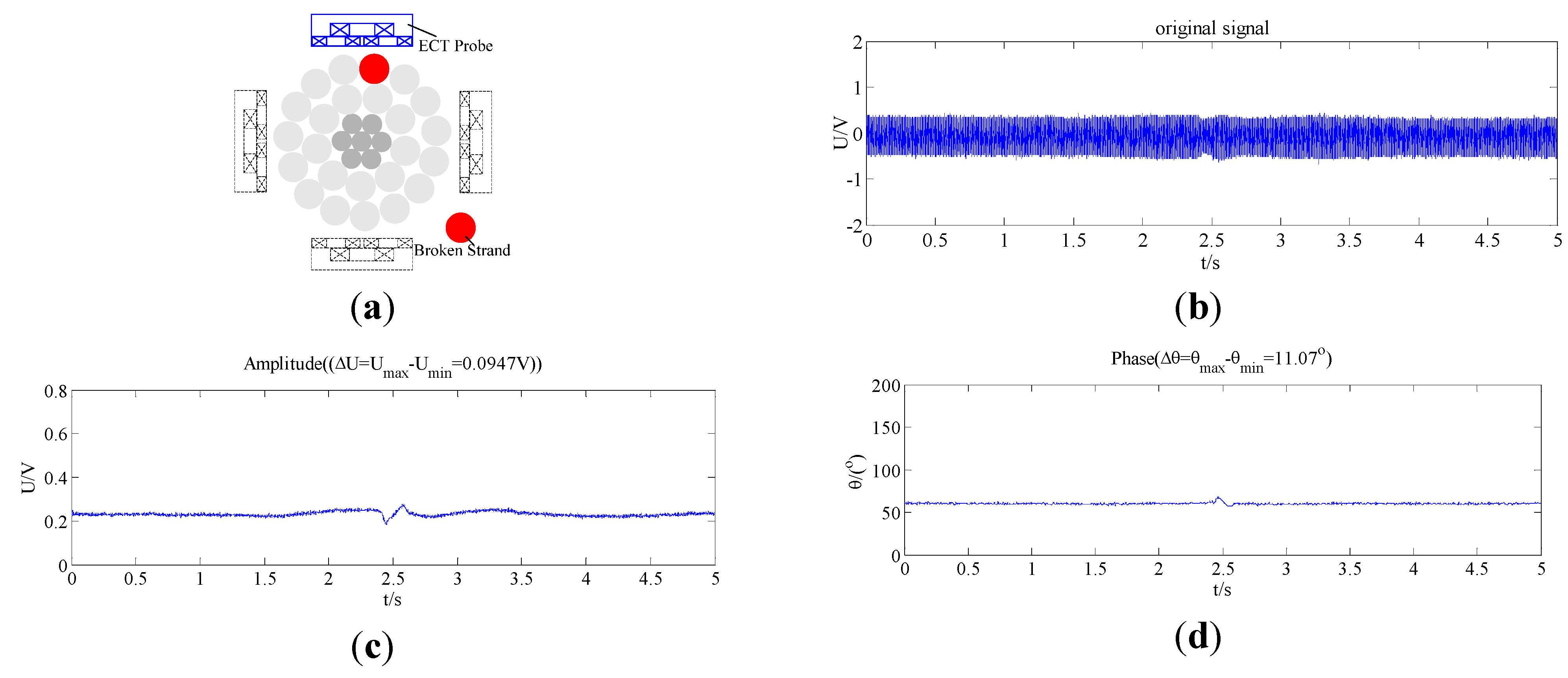
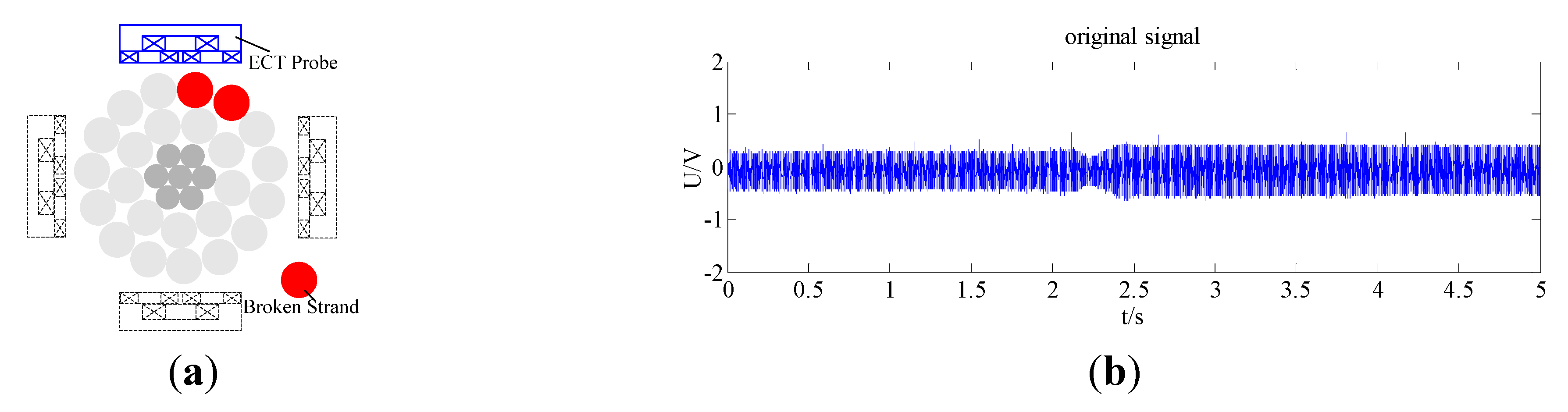
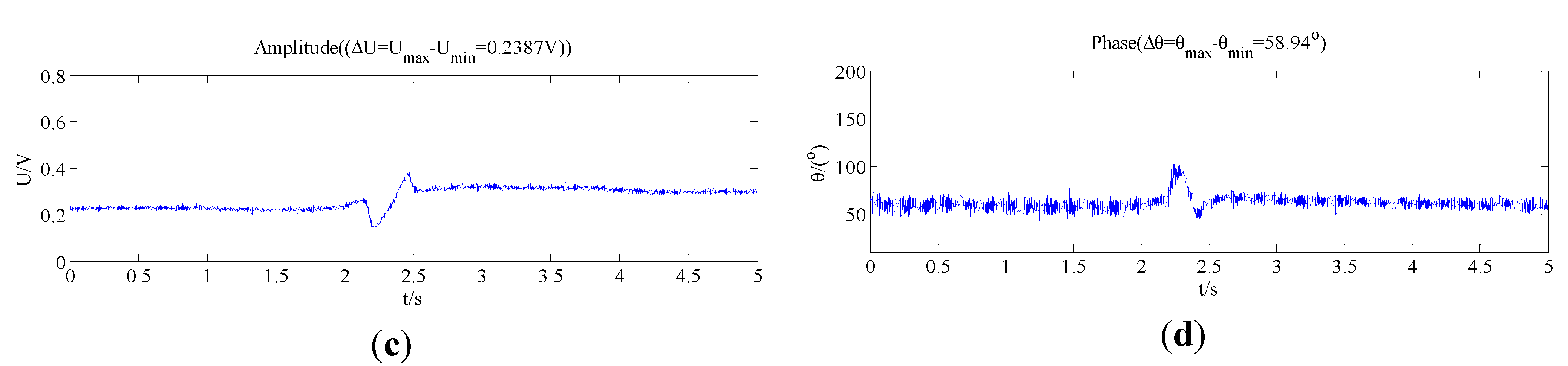
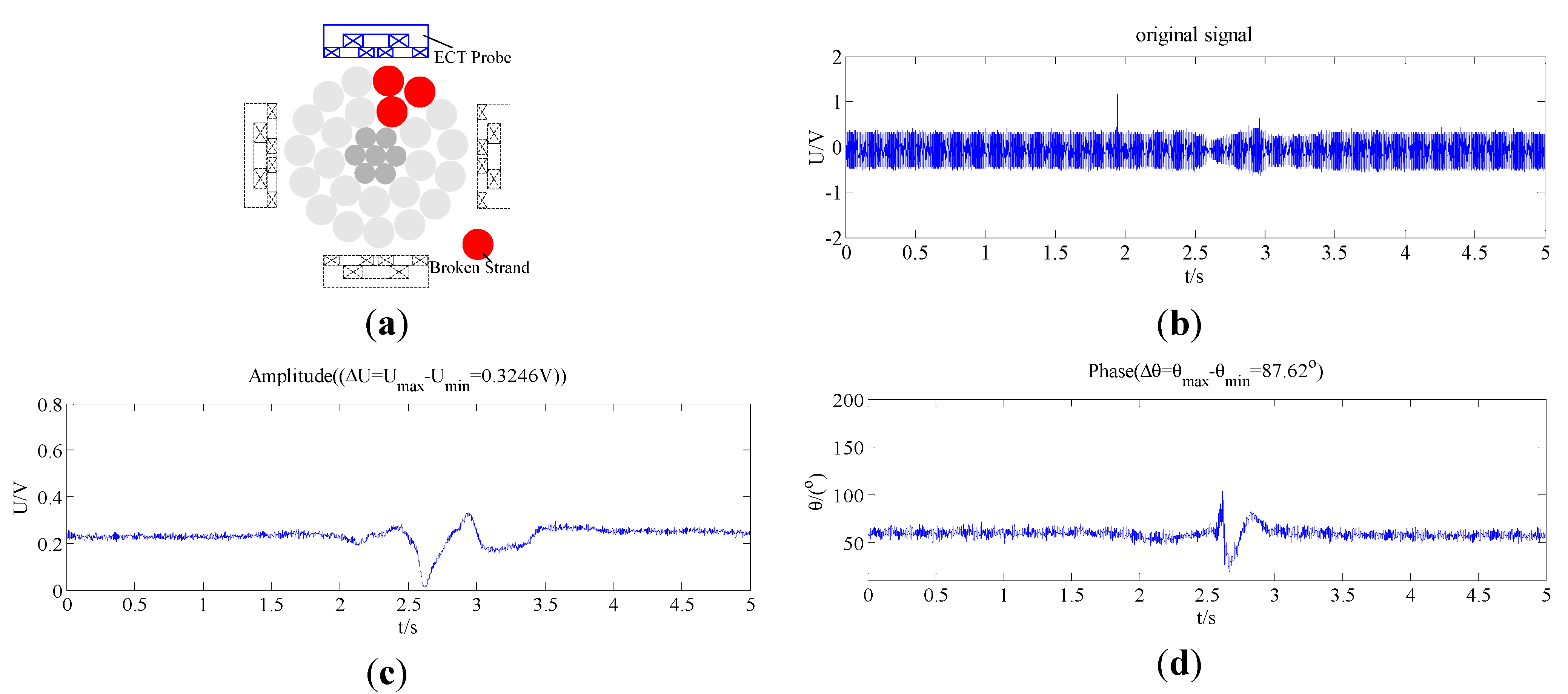
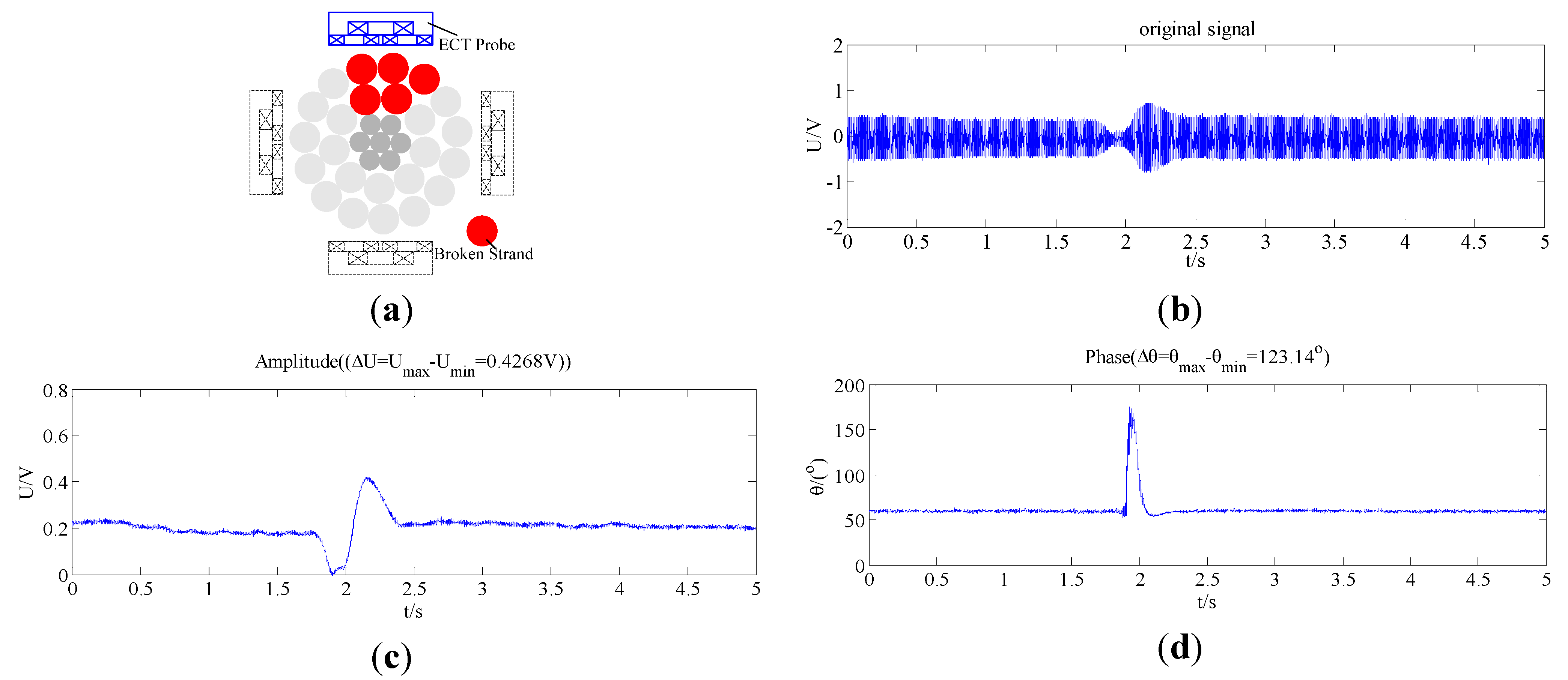
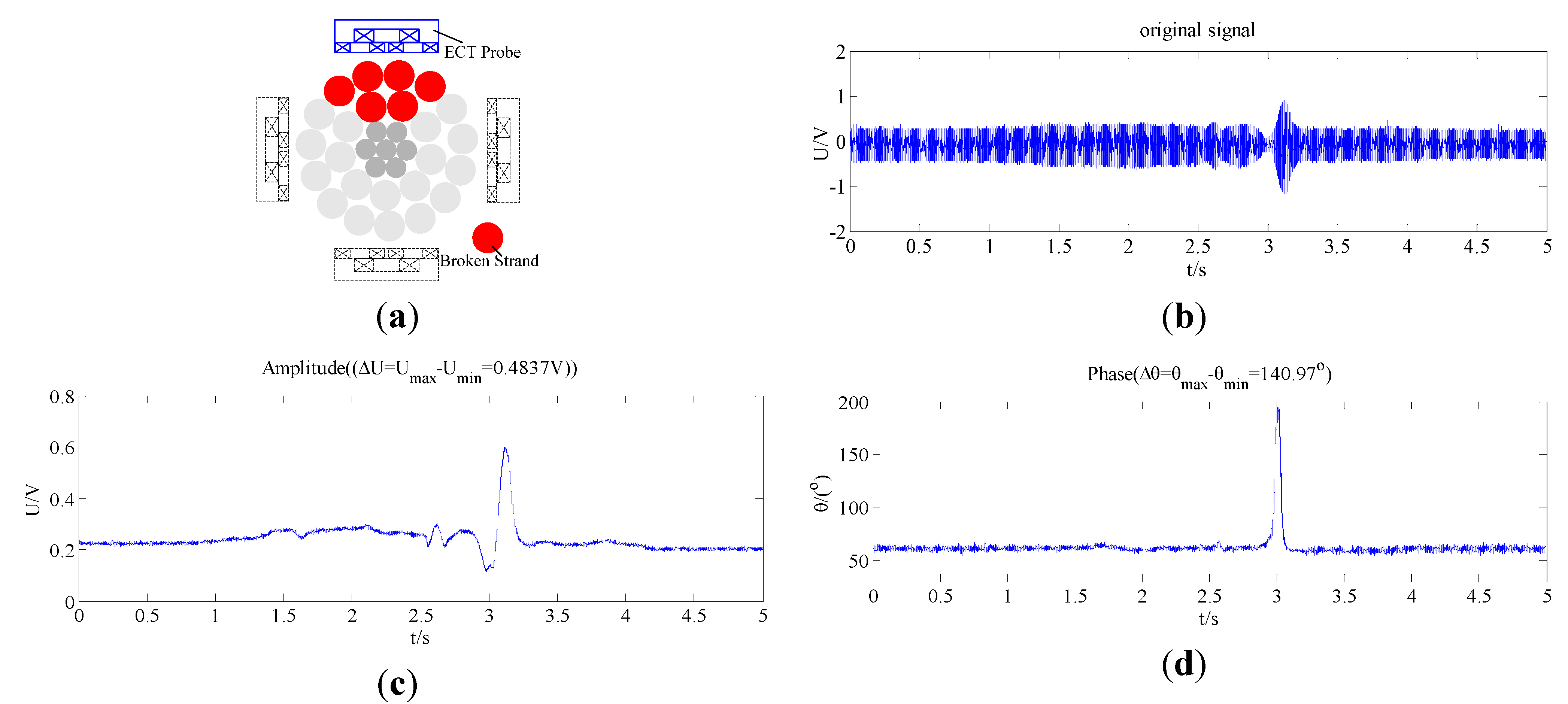
- The amplitude U and phase θ obviously change when there are broken strands in the transmission line, so the developed ECT can detect broken strands with high sensitivity, reliability and stability. An algorithm for detecting broken strands in transmission lines can be proposed based on the amplitude U and phase θ.
- (2)
- The amplitude difference ΔU and phase difference Δθ vary with the number of broken strands. The more broken strands in a transmission line, the larger value the of ΔU and Δθ, so the amplitude difference ΔU and phase difference Δθ can be used as characteristic parameters for detecting broken strands in transmission lines.
- (3)
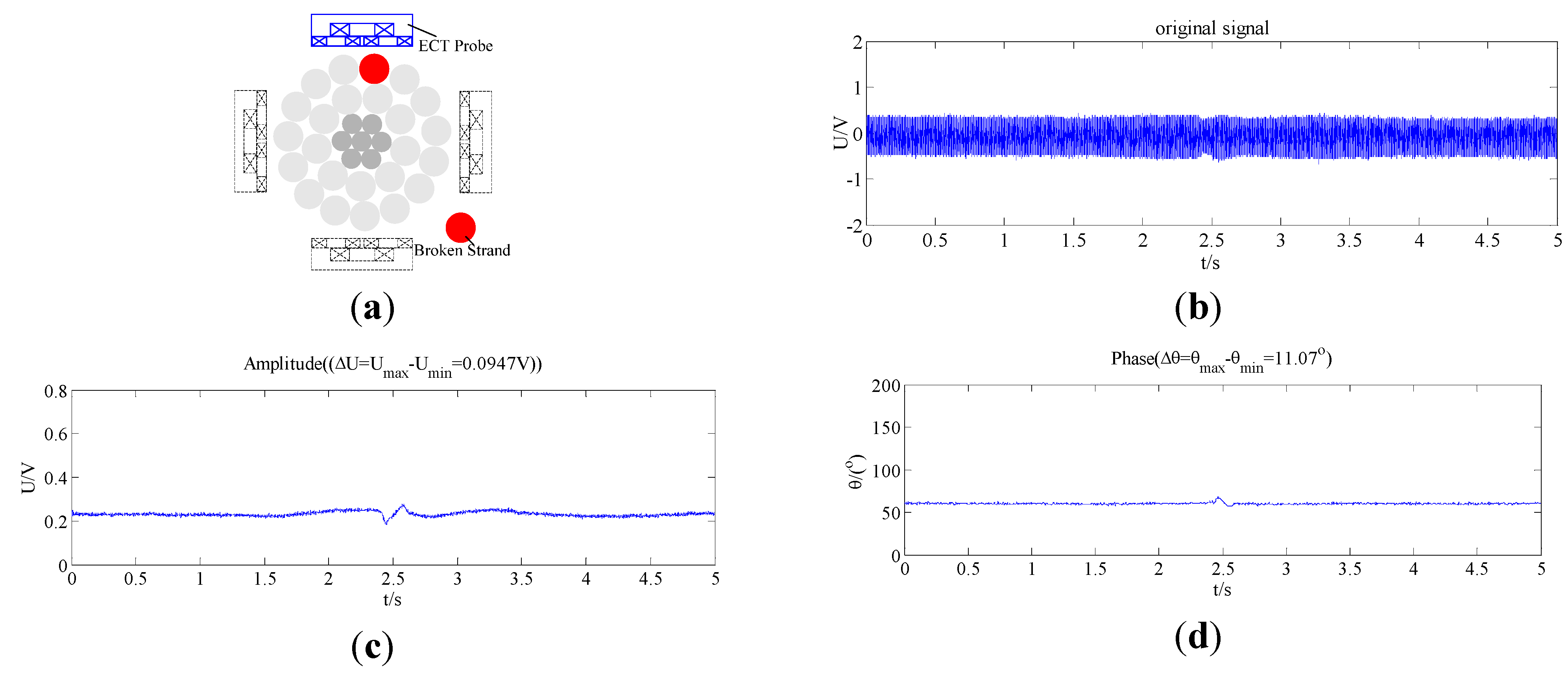
- The amplitude U and phase θ calculated by the S-transform change more obviously than the original detection signal. It can be seen from Figure 8a that only one broken strand in a transmission line cannot be detected only by the original signal, whereas the one broken strand can be detected easily by the amplitude U and phase θ variation shown in Figure 8c,d.
| Specimen | Feature Quality | Diagnosis Result by SVM with best C and γ | Diagnosis Result by BPN | Actual Result | |||
|---|---|---|---|---|---|---|---|
| Amplitude ΔU (V) | Phase Δθ (Degree) | SFE-BSICD | Energy E (J) | ||||
| 1 | 0.0947 | 11.07 | 0.1707 | 7987 | 1 | 1 | 1 |
| 2 | 0.2387 | 58.94 | 0.1637 | 9433 | 2 | 2 | 2 |
| 3 | 0.3246 | 87.62 | 0.1558 | 10626 | 3 | 3 | 3 |
| 4 | 0.3762 | 103.11 | 0.1462 | 12102 | 4 | 4 | 4 |
| 5 | 0.4268 | 123.14 | 0.136 | 13727 | 5 | 5 | 5 |
| 6 | 0.4837 | 140.97 | 0.1283 | 15442 | 6 | 5 | 6 |
| 7 | 0.0023 | 0.69 | 0.1853 | 7162 | 0 | 0 | 0 |
| 8 | 0.3301 | 86.98 | 0.1567 | 11007 | 3 | 3 | 3 |
| 9 | 0.3921 | 102.86 | 0.1451 | 11899 | 4 | 4 | 4 |
| 10 | 0.4302 | 119.98 | 0.1367 | 14102 | 5 | 4 | 5 |
| 11 | 0.2503 | 59.01 | 0.1598 | 9387 | 2 | 2 | 2 |
| 12 | 0.0097 | 1.23 | 0.1839 | 7303 | 0 | 1 | 0 |
| 13 | 0.1123 | 13.67 | 0.698 | 8103 | 1 | 1 | 1 |
| 14 | 0.4197 | 119.67 | 0.1352 | 13673 | 5 | 5 | 5 |
| 15 | 0.4968 | 146.37 | 0.1267 | 15633 | 6 | 6 | 6 |
| 16 | 0.3271 | 86.98 | 0.1549 | 10897 | 3 | 3 | 3 |
| 17 | 0.3697 | 99.67 | 0.1497 | 12203 | 4 | 4 | 4 |
| 18 | 0.1207 | 14.67 | 0.1689 | 8066 | 1 | 1 | 1 |
| 19 | 0.2311 | 55.36 | 0.1641 | 9221 | 2 | 2 | 2 |
| 20 | 0.0102 | 2.27 | 0.1847 | 7221 | 0 | 0 | 0 |
6. Conclusions
- (1)
- A kind of ECT for detecting broken strands in transmission lines has been developed in this paper. The ECT probe is designed for LGJ-240 transmission lines. At the same time, the structural style and design method of the ECT can be applied to the design of ECTs for other types of transmission line. The specific parameters of the ECT probe can be determined by the type of transmission line.
- (2)
- The ECT probe is composed of an excitation coil and a differential detection coil, which is composed of the same two coils connected in subtractive series. The detection signal is processed by an S-transform to extract relevant features such as module, phase, energy and the corresponding defined SFE-BSICD. Then not only broken strands in cable can be detected with high reliability and sensitivity, but also the hardware circuit of the ECT is simplified.
- (3)
- Energized current of sinusoidal wave in ECT is generated by a DDS in this study, so the accuracy and stability of the detection signal is improved correspondingly.
- (4)
- Experimental results show that the magnetic field produced by the current in a transmission line has no impact on the performance of the ECT for detecting broken strands in the transmission line, so the developed method for detecting broken strands is suitable for on-line real time inspection.
- (5)
- A novel feature extraction scheme incorporates an S-transform and multi-classification SVM for quantitatively identifying broken strands in transmission lines is proposed by this paper, the penalty parameter of the error term kernel parameter for the SVM is optimized by GA, so the classification accuracy is very high. The detection accuracy is sufficient to locate flaws of one half the size of one strand, which is adequate for industrial requirements, so the developed ECT and proposed detection scheme for detecting broken strands in transmission lines make an important contribution for insuring the safe operation of transmission lines.
Acknowledgement
References
- Lings, R.; Cannon, D.; Hill, L.; Gaudry, M.; Stone, R.; Shoureshi, R. Inspection & Assessment of Overhead Line Conductors; A State-of-the Science Report, EPRI Technical Progress 1000258; Electric Power Research Institute: Palo Alto, CA, USA, 2000. [Google Scholar]
- Goda, Y.; Yokoyama, S.; Watanabe, S.; Kawano, T.; Kanda, S. Melting and breaking characteristics of OPGW strands by lightning. IEEE Trans. Power Deliv. 2004, 19, 1734–1740. [Google Scholar] [CrossRef]
- Kudzys, W. Safety of power transmission line structures under wind and ice storms. Eng. Struct. 2006, 28, 682–689. [Google Scholar] [CrossRef]
- Isozaki, M.; Adachi, K.; Hita, T.; Asano, Y. Study of corrosion resistance improvement by metallic coating for overhead transmission line conductor. Electr. Eng. Jpn. 2008, 163, 41–47. [Google Scholar] [CrossRef]
- Raupp, D.; Vogel, W.; Wehking, K.H. Fatigue behaviour of open spiral strand cables. Bautechnik 2007, 84, 41–46. (in German). [Google Scholar] [CrossRef]
- Cameron, G.W.; Bodger, P.S.; Woudberg, J.J. Incomplete faraday cage effect of helicopters used in platform live-line maintenance. IEE Proc. Gener. Transm. Distrib. 1998, 145, 145–148. [Google Scholar] [CrossRef]
- Ashidater, S.; Murashima, S.; Fujii, N. Development of a helicopter-mounted eye-safe laser radar system for distance measurement between power transmission lines and nearby trees. IEEE Trans. Power Deliv. 2002, 17, 644–648. [Google Scholar] [CrossRef]
- Sawada, J.; Kusumoto, K.; Maikawa, Y.; Munakata, T.; Ishikawa, Y. A mobile robot for inspection of power transmission lines. IEEE Trans. Power Delivery 1991, 6, 309–315. [Google Scholar] [CrossRef]
- Toussaint, K.; Pouliot, N.; Montambault, S. Transmission line maintenance robots capable of crossing obstacles: Stage-of-the-art review and challenges ahead. J. Field Rob. 2009, 26, 477–499. [Google Scholar] [CrossRef]
- Li, W.H.; Tajbakhsh, A.; Rathbone, C.; Vashishtha, Y. Image Processing to Automate Condition Assessment of Overhead Line Components. In Proceedings of the 2010 1stInternational Conference on Applied Robotics for the Power Industry, Montréal, Canada, 5–7 October 2010; pp. 1–6.
- Zhou, F.Y.; Li, Y.B.; Feng, G.R. A real-time method for detecting and diagnosing broken strand of high voltage transmission line with inspect robot. Trans. China Electrortech. Soc. 2010, 25, 185–191. (in Chinese). [Google Scholar]
- Haag, T.; Beadle, B.M.; Sprenger, H.; Gaul, L. Wave-based defect detection and inter-wire friction modeling for overhead transmission lines. Arch. Appl. Mech. 2009, 79, 517–528. [Google Scholar] [CrossRef]
- Shoureshi, R.A.; Lim, S.-W.; Dolev, E.; Sarusi, B. Electro-magnetic-acoustic transducers for automatic monitoring and health assessment of transmission lines. J. Dyn. Syst. Meas. Control 2004, 126, 303–308. [Google Scholar] [CrossRef]
- Hatsukade, Y.; Miyazaki, A.; Matsuura, H.; Suzuki, A.; Tanaka, S. Study of inspection of wire breakage in aluminum transmission line using SQUID. NDT&E Int. 2009, 42, 170–173. [Google Scholar] [CrossRef]
- Miyazaki, A.; Hatsukade, Y.; Matsuura, H.; Maeda, T.; Suzuki, A.; Tanaka, S. Detection of wire element breakage in power transmission line using HTS-SQUID. J. Phys. C 2009, 469, 1643–1648. [Google Scholar] [CrossRef]
- Tadeusiewicz, R.; Wszolek, T.; Izworski, A.; Wszolek, W. Recognition of Defects in High voltage Transmission Lines Using the Acoustic Signal of Corona Effect. In Proceedings of the 2000 IEEE Signal Processing Society Workshop, Sydney, Australia, 11–13 December 2000; pp. 869–875.
- Moreira, P.L.F.; Lourenco, P.M.; Lourenco, C.R.S.H.; Sebrao, M.Z.; Sant’anna, I.; Wavrik, J.F.A.G. Internal Corrosion in conductor Cables of Power Transmission Lines: Characterization of the Atmosphere and Techniques for Faults Detection. In Proceedings of the 2nd International Multi-Conference on Engineering and Technological Innovation, Orlando, FL, USA, 10–13 July 2009; pp. 1–6.
- Kim, S.D.; Morcos, M.M. An application of solenoid sensor for inspecting deterioration of ACSR conductors due to forest fires. IEEE Power Eng. Rev. 2001, 21, 50–53. [Google Scholar]
- Dalpé, C.; Goudreau, S.; Cloutier, L.; Cardou, A. Use of eddy current technology to assist in the evaluation of the fatigue damage of electrical conductors. Res. Nondestr. Eval. 2008, 19, 181–201. [Google Scholar] [CrossRef]
- Komoda, M.; Kawashima, T.; Minemura, M.; Aihara, M.; Ebinuma, T.; Kanno, T.; Kiuchi, M. Electromagnetic induction method for detecting and locating flaws on overhead transmission lines. IEEE Trans. Power Deliv. 1990, 5, 1484–1489. [Google Scholar] [CrossRef]
- Daubechies, I. The wavelet transform, time-frequency localization and signal analysis. IEEE Trans. Inf. Theory 1990, 961, 1005–1036. [Google Scholar]
- Cheng, J.S.; Yu, D.J.; Yang, Y. A fault diagnosis approach for roller bearings based on EMD method and AR model. Mech. Syst. Signal Process. 2006, 20, 350–362. [Google Scholar] [CrossRef]
- Dash, P.K.; Samantaray, S.R.; Panda, G.; Panigrahi, B.K. Time-frequency transform approach for protection of parallel transmission lines. IET Proc. Gener. Transm. Distrib. 2007, 1, 30–38. [Google Scholar] [CrossRef]
- Su, Z.Y.; Zhang, Y.M.; Jia, M.P.; Xu, F.Y.; Hu, J.Z. Gear fault identification and classification of singular value decomposition based on hilbert-huang transform. J. Mech. Sci. Technol. 2011, 25, 267–272. [Google Scholar] [CrossRef]
- Li, Z.X.; Yan, X.P.; Yuan, C.Q.; Peng, Z.X.; Li, L. Feature extraction and classification of gear faults using principal component analysis. J. Qual. Maint. Eng. 2003, 9, 132–143. [Google Scholar] [CrossRef]
- Widodo, A.; Yang, B.-S.; Han, T. Combination of independent component analysis and support vector machines for intelligent faults diagnosis of induction motors. Expert Syst. Appl. 2007, 32, 299–312. [Google Scholar] [CrossRef]
- Stockwell, R.G.; Mansinha, L.; Lowe, R.P. Localization of the complex spectrum: The S-transform. IEEE Trans. Signal Process. 1996, 44, 998–1001. [Google Scholar] [CrossRef]
- Stockwell, R.G. S-transform Analysis of Gravity Wave Activity from a Small Scale Network of Airglow Imagers. Ph.D. Thesis, Western Ontario University, Ontario, Canada, 1999. [Google Scholar]
- Assous, S.; Humeau, A.; Tartas, M.; Abraham, M.P.; L’Huillier, J.P. S-transform applied to laser doppler flowmetry reactive hyperemia signals. IEEE Trans. Biomed. Eng. 2006, 53, 1032–1037. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Yang, Q.; Sima, W.X.; Yuan, T.; Zahn, M. A smart online over-voltage monitoring and identification system. Energies 2011, 4, 599–615. [Google Scholar] [CrossRef] [Green Version]
- Chilukuri, M.V.; Dash, P.K. Multi-resolution S-transform-based fuzzy recognition system for power quality events. IEEE Trans. Power Deliv. 2004, 19, 323–330. [Google Scholar] [CrossRef]
- Bhende, C.N.; Mishra, S.; Panigrahi, B.K. Detection and classification of power quality disturbances using S-transform and modular neural network. Electr. Power Syst. Res. 2008, 78, 122–128. [Google Scholar] [CrossRef]
- Mokryani, G.; Siano, P.; Piccolo, A. Identification of ferroresonance based on S-transform and support vector machine. Simul. Model. Pract. Theory 2010, 18, 1412–1424. [Google Scholar] [CrossRef]
- Lei, Y.G.; He, Z.J.; Zi, Y.Y.; Hu, Q. Fault diagnosis of rotating machinery based on multiple ANFIS combination with gas. Mech. Syst. Signal Process. 2007, 21, 2280–2294. [Google Scholar] [CrossRef]
- Zhang, J.; He, Z.Y.; Jia, Y. Fault line identification approach based on S-transform. Proc. CSEE 2011, 31, 109–115. (in Chinese). [Google Scholar]
- Stefanoiu, D.; Ionescu, F. A Fuzzy-Statistical Reasoning Model for Bearings Fault Diagnosis. In Proceedings of the 2002 IEEE International Conference on Systems, Man and Cybernetics, Hammamet, Tunisia, 6–9 October 2002.
- Cristianini, N.; Shawe-Taylor, J. An Introduction to Support Vector Machines and Other Kernel-Based Learning Methods, 1st ed.; Cambridge University Press: Cambridge, UK, 2000; pp. 93–111. [Google Scholar]
- Hsu, C.W.; Lin, C.J. A comparison of methods for multi-class support vector machines. IEEE Trans. Neural Netw. 2002, 13, 415–525. [Google Scholar] [CrossRef] [PubMed]
- Gen, M.; Cheng, R.W. Genetic Algorithms and Engineering Optimization, 1st ed.; John Wiley: New York, NY, USA, 2000; pp. 97–141. [Google Scholar]
- Zhang, W.P.; Shi, L.T.; Zhao, X.S. The principle and design for long distance electric eddy current sensor with double coils. Acta Electron. Sin. 1998, 26, 61–65. (in Chinese). [Google Scholar]
© 2011 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Jiang, X.; Xia, Y.; Hu, J.; Zhang, Z.; Shu, L.; Sun, C. An S-Transform and Support Vector Machine (SVM)-Based Online Method for Diagnosing Broken Strands in Transmission Lines. Energies 2011, 4, 1278-1300. https://doi.org/10.3390/en4091278
Jiang X, Xia Y, Hu J, Zhang Z, Shu L, Sun C. An S-Transform and Support Vector Machine (SVM)-Based Online Method for Diagnosing Broken Strands in Transmission Lines. Energies. 2011; 4(9):1278-1300. https://doi.org/10.3390/en4091278
Chicago/Turabian StyleJiang, Xingliang, Yunfeng Xia, Jianlin Hu, Zhijin Zhang, Lichun Shu, and Caxin Sun. 2011. "An S-Transform and Support Vector Machine (SVM)-Based Online Method for Diagnosing Broken Strands in Transmission Lines" Energies 4, no. 9: 1278-1300. https://doi.org/10.3390/en4091278