
Fault Diagnosis and Fault-Tolerant Control of Wind Turbines via a Discrete Time Controller with a Disturbance Compensator



Abstract
:1. Introduction
2. Reference WT

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference Wind Turbine | |
|---|---|
| Rated power | 5 MW |
| Number of blades | 3 |
| Rotor/hub diameter | 126 m, 3 m |
| Hub height | 90 m |
| Cut-in, rated, cut-out wind speed | 3 m/s, 11.4 m/s, 25 m/s |
| Rated generator speed (ωng) | 1, 173.7 rpm |
| Gearbox ratio | 97 |
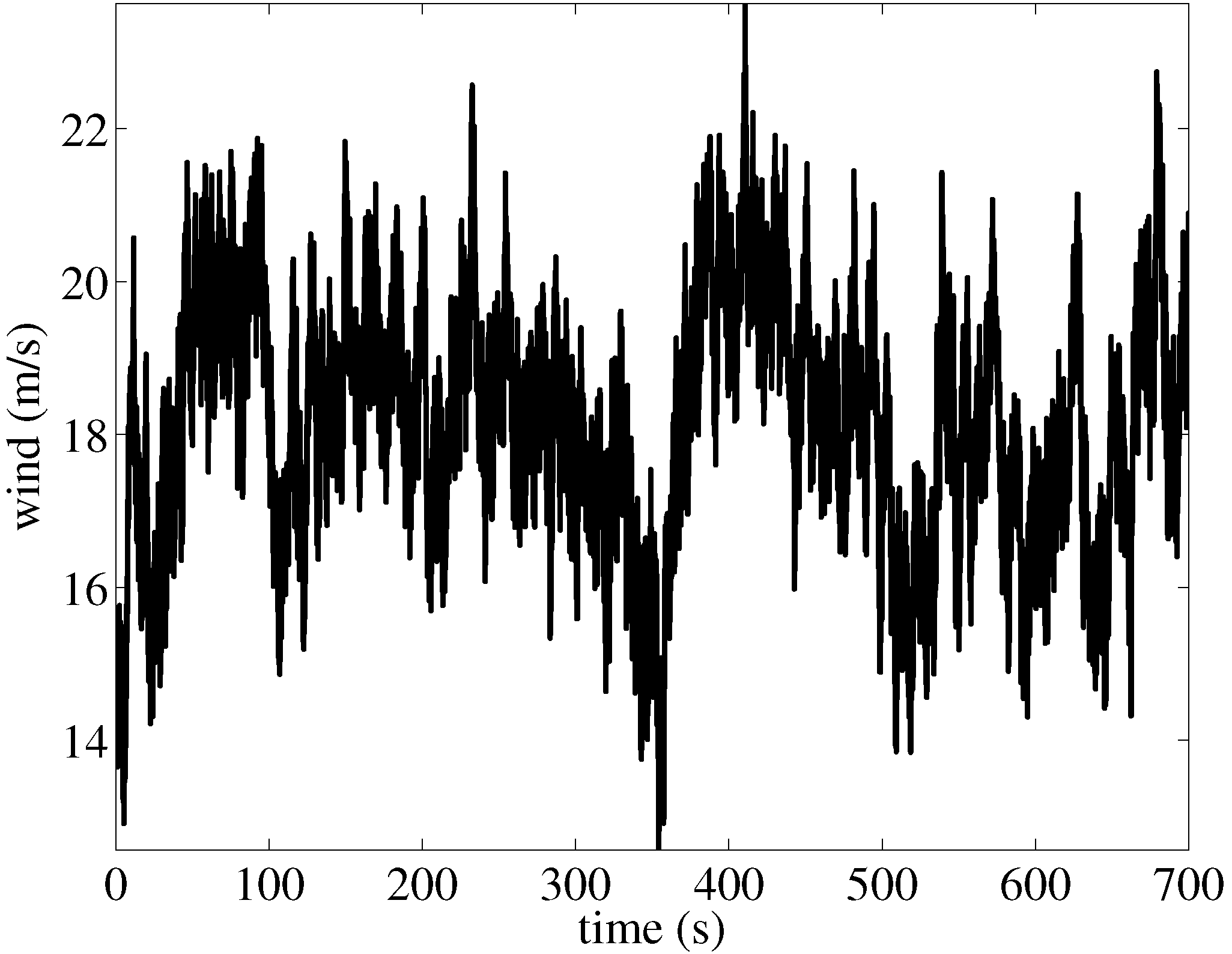
3. Wind Modeling
- Grid settings and position matched with the rotor diameter and the center of the grid positioned at hub height. This represents a grid size of 130 × 130 m centered at 19.55 m.
- The Kaimal turbulence model is selected.
- The turbulence intensity is set to 10%.
- Normal wind type is chosen with a logarithmic profile.
- Reference height is set to 90.25 m. This is the height where the mean wind speed is simulated.
- Mean (total) wind speed is set to 18.2 m/s.
- The roughness factor is set to 0.01 m, which corresponds to a terrain type of open country without significant buildings and vegetation.

3.1. Generator-Converter Actuator Model
3.2. Pitch Actuator Model
3.3. Fault Description
| Faults | ωn (Rad/s) | ξ |
|---|---|---|
| Fault-free (FF) | 11.11 | 0.6 |
| High air content in oil (F1) | 5.73 | 0.45 |
| Pump wear (F2) | 7.27 | 0.75 |
| Hydraulic leakage (F3) | 3.42 | 0.9 |
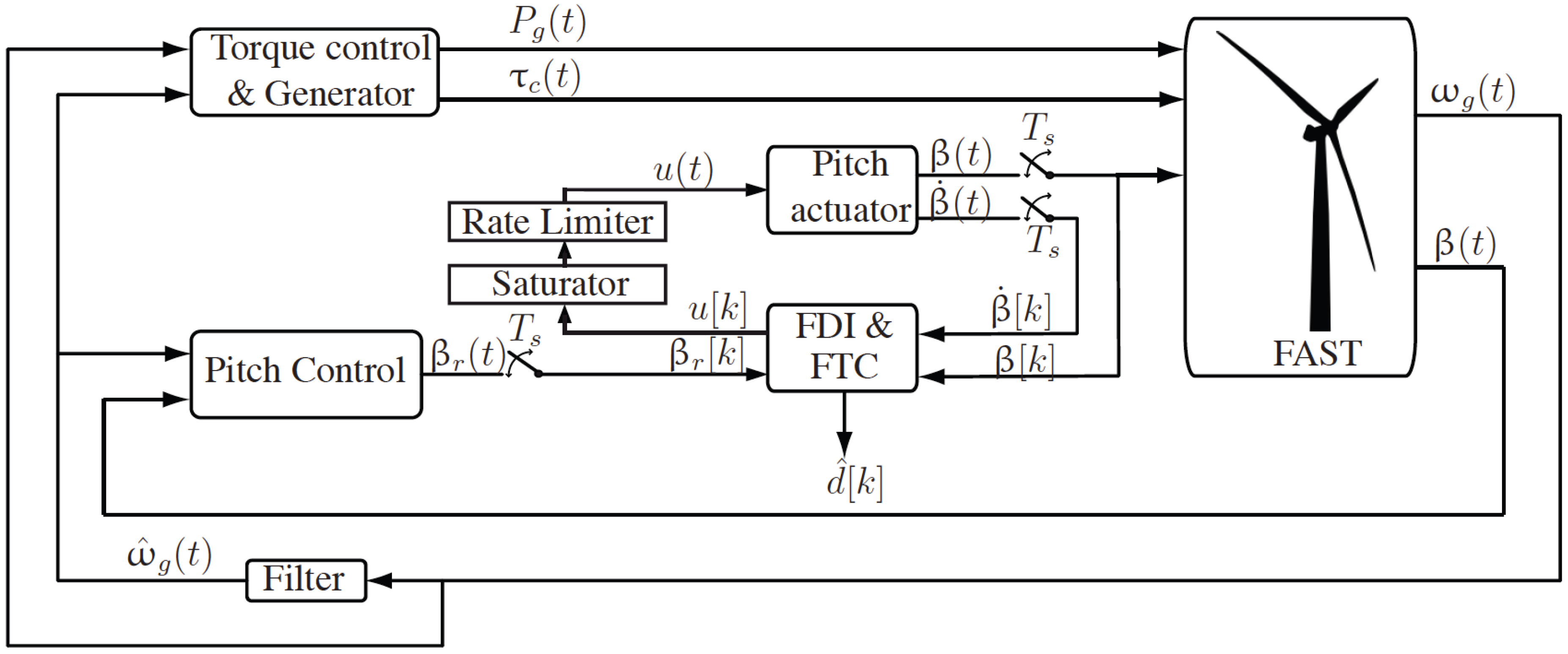
4. Baseline Control Strategy
5. Fault-Tolerant Control

- It ensures that the closed-loop system has finite time stability of the equilibrium point (Pe(t)−Pref), and the settling time can be chosen by properly defining the values of the parameters a and Kα.
- It does not require information from the turbine total external damping or the turbine total inertia. It only requires the filtered generator speed and reference power of the WT.
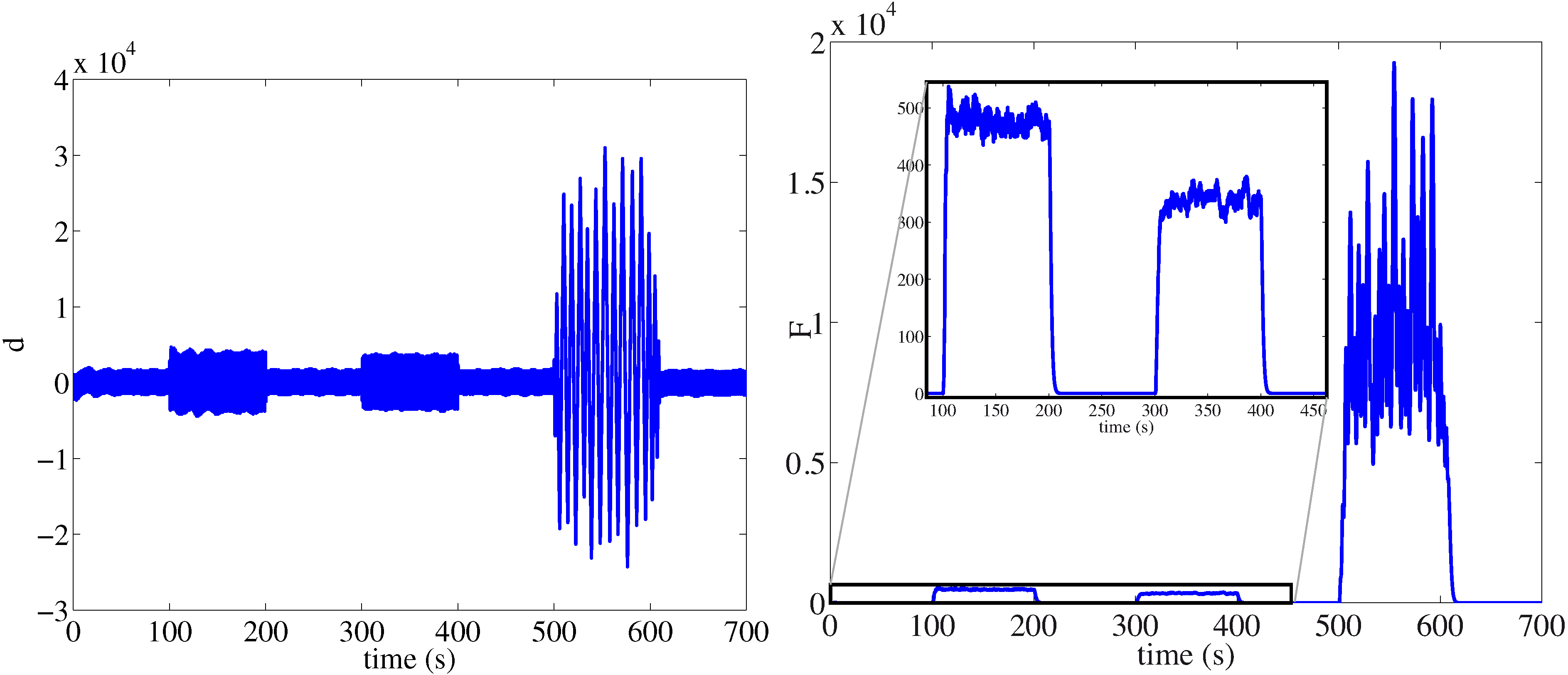
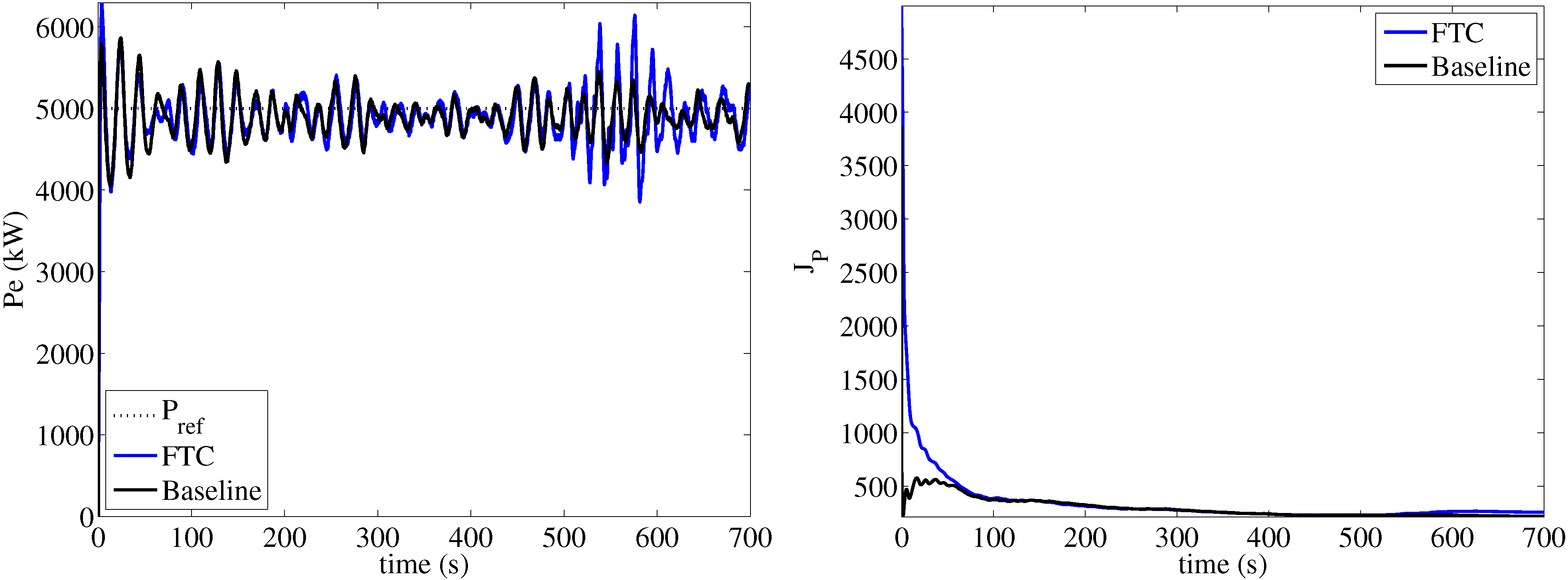
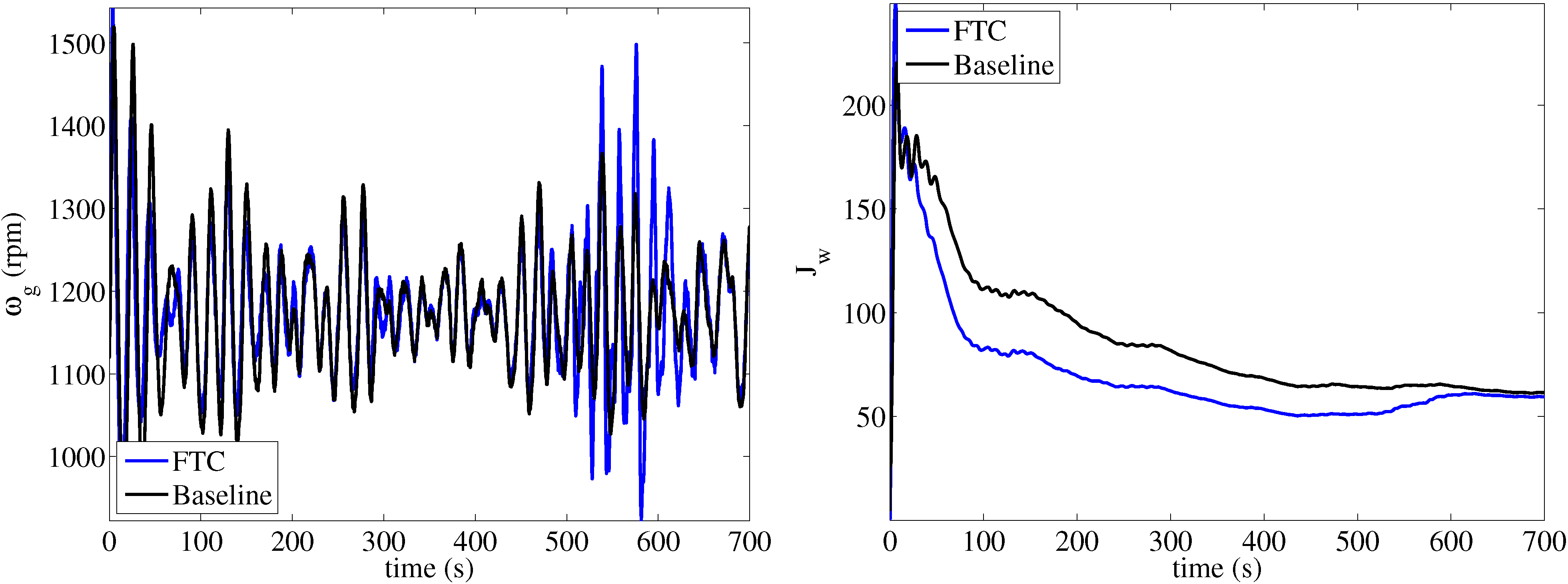
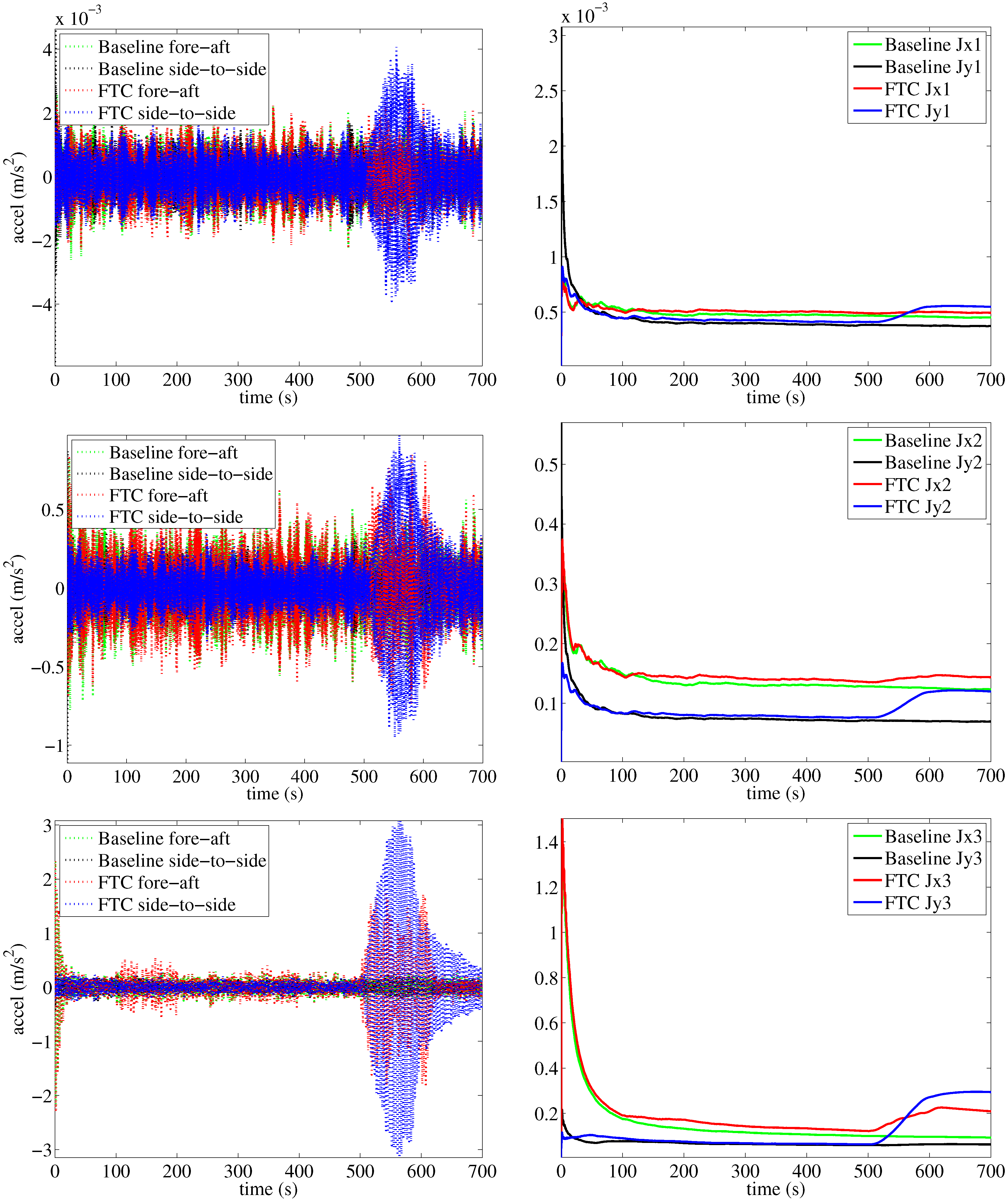
6. Results
- From 0 to 100 s, it is fault-free.
- From 100 to 200 s, a fault due to high air content in the oil (F1) is active.
- From 200 to 300 s, it is fault-free.
- From 300 to 400 s, a fault due to pump wear (F2) is active.
- From 400 to 500 s, it is fault-free.
- From 500 to 600 s, a fault due to hydraulic leakage (F3) is active.
- From 600 to 700 s, it is fault-free.
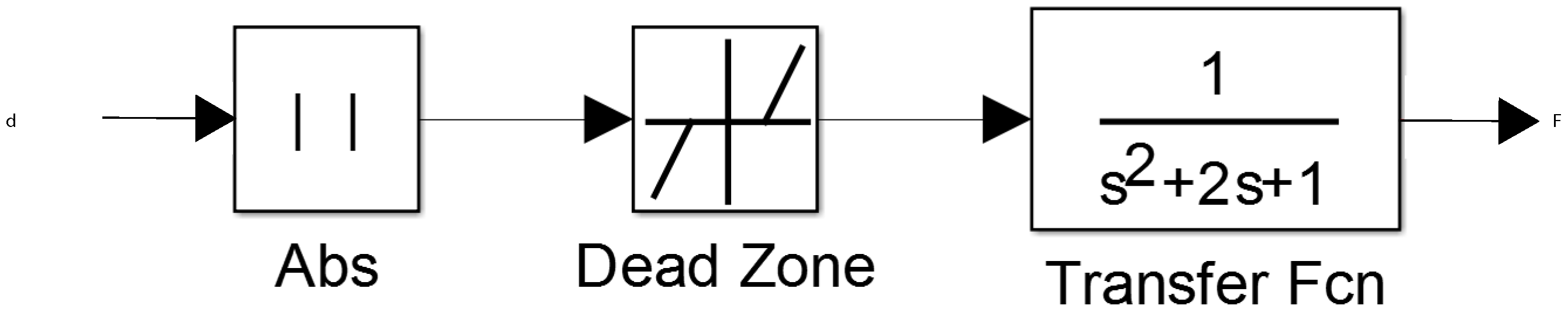
- When the signal is smaller than 400, then F2 is detected. This can be seen in the zoom in Figure 3 (right).
- When the signal is between 400 and 5000, then F1 is detected.
- When the signal is above 5000. then F3 is detected.






7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Odgaard, P.; Johnson, K. Wind Turbine Fault Diagnosis and Fault Tolerant Control—An Enhanced Benchmark Challenge. In Proceedings of the 2013 American Control Conference—ACC, Washington, DC, USA, 17–19 June 2013; pp. 1–6.
- Chaaban, R.; Ginsberg, D.; Fritzen, C.P. Structural Load Analysis of Floating Wind Turbines Under Blade Pitch System Faults. In Wind Turbine Control and Monitoring; Luo, N., Vidal, Y., Acho, L., Eds.; Springer: Zürich, Switzerland, 2014; pp. 301–334. [Google Scholar]
- Amirat, Y.; Benbouzid, M.E.H.; Al-Ahmar, E.; Bensaker, B.; Turri, S. A brief status on condition monitoring and fault diagnosis in wind energy conversion systems. Renew. Sustain. Energy Rev. 2009, 13, 2629–2636. [Google Scholar] [CrossRef] [Green Version]
- Hameed, Z.; Ahn, S.; Cho, Y. Practical aspects of a condition monitoring system for a wind turbine with emphasis on its design, system architecture, testing and installation. Renew. Energy 2010, 35, 879–894. [Google Scholar] [CrossRef]
- Zeng, J.; Lu, D.; Zhao, Y.; Zhang, Z.; Qiao, W.; Gong, X. Wind turbine fault detection and isolation using support vector machine and a residual-based method. In Proceedings of the American Control Conference (ACC), Washington, DC, USA, 17–19 June 2013; pp. 3661–3666.
- Vidal, Y.; Acho, L.; Pozo, F. Robust fault detection in hysteretic base-isolation systems. Mech. Syst. Signal Process. 2012, 29, 447–456. [Google Scholar] [CrossRef]
- Chen, W.; Ding, S.X.; Sari, A.; Naik, A.; Khan, A.Q.; Yin, S. Observer-based fdi schemes for wind turbine benchmark. In Proceedings of the IFAC World Congress, Milano, Italy, 28 August–2 September 2011; pp. 7073–7078.
- Stoican, F.; Raduinea, C.F.; Olaru, S. Adaptation of set theoretic methods to the fault detection of wind turbine benchmark. In Proceedings of the IFAC World Congress, Milano, Italy, 28 August–2 September 2011; pp. 8322–8327.
- Svärd, C.; Nyberg, M. Automated design of an fdi-system for the wind turbine benchmark. In Proceedings of the IFAC World Congress, Milano, Italy, 28 August–2 September 2011; Volume 18, pp. 8307–8315.
- Pisu, P.; Ayalew, B. Robust fault diagnosis for a horizontal axis wind turbine. In Proceedings of the IFAC World Congress, Milano, Italy, 28 August–2 September 2011; Volume 2, pp. 7055–7060.
- Dong, J.; Verhaegen, M. Data driven fault detection and isolation of a wind turbine benchmark. In Proceedings of the IFAC World Congress, Milano, Italy, 28 August–2 September 2011; Volume 2, pp. 7086–7091.
- Kiasi, F.; Prakash, J.; Shah, S.; Lee, J.M. Fault detection and isolation of benchmark wind turbine using the likelihood ratio test. In Proceedings of the IFAC World Congress, Milano, Italy, 28 August–2 September 2011; pp. 7079–7085.
- Sloth, C.; Esbensen, T.; Stoustrup, J. Robust and fault-tolerant linear parameter-varying control of wind turbines. Mechatronics 2011, 21, 645–659. [Google Scholar] [CrossRef]
- Jiang, J.; Yu, X. Fault-tolerant control systems: A comparative study between active and passive approaches. Ann. Rev. Control 2012, 36, 60–72. [Google Scholar] [CrossRef]
- Casau, P.; Rosa, P.A.N.; Tabatabaeipour, S.M.; Silvestre, C. Fault detection and isolation and fault tolerant control of wind turbines using set-valued observers. In Proceedings of the 8th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes, Mexico City, Mexico, 29–31 August 2012; pp. 120–125.
- Kim, J.; Yang, I.; Lee, D. Control allocation based compensation for faulty blade actuator of wind turbine. In Proceedings of the 8th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes, Mexico City, Mexico, 29–31 August 2012; Volume 8, pp. 355–360.
- Rotondo, D.; Nejjari, F.; Puig, V.; Blesa, J. Fault tolerant control of the wind turbine benchmark using virtual sensors/actuators. In Proceedings of the 8th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes, Mexico City, Mexico, 29–31 August 2012; Volume 8, pp. 114–119.
- Sami, M.; Patton, R.J. Global wind turbine FTC via TS fuzzy modelling and control. In Proceedings of the 8th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes, Mexico City, Mexico, 29–31 August 2012; Volume 8, pp. 325–330.
- Simani, S.; Castaldi, P. Active actuator fault-tolerant control of a wind turbine benchmark model. Int. J. Robust Nonlinear Control 2014, 24, 1283–1303. [Google Scholar]
- Yang, X.; Maciejowski, J. Fault-tolerant model predictive control of a wind turbine benchmark. In proceedings of the 8th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes, Mexico City, Mexico, 29–31 August 2012; pp. 337–342.
- Pao, L.Y.; Johnson, K.E. Control of wind turbines. IEEE Control Syst. 2011, 31, 44–62. [Google Scholar] [CrossRef]
- Zhao, W.; Qin, L.; Yao, X.; Shan, G. Modeling Research of MW Wind Turbine Variable Pitch System. Mach. Tool Hydraul. 2006, 6, 056. [Google Scholar]
- Wei, X.; Verhaegen, M.; van Engelen, T. Sensor fault detection and isolation for wind turbines based on subspace identification and Kalman filter techniques. Int. J. Adapt. Control Signal Process. 2010, 24, 687–707. [Google Scholar] [CrossRef]
- Dolan, B. Wind Turbine Modelling, Control and Fault Detection. Ph.D. Thesis, Technical University of Denmark, Lyngby, Denmark, August 2010. [Google Scholar]
- Donders, S.; Verdult, V.; Verhaegen, M. Fault Detection and Identification for Wind Turbine Systems: A Closed-Loop Analysis. Master’s Thesis, University of Twente, Enschede, The Netherlands, June 2002. [Google Scholar]
- Mešic, S.; Verdult, V.; Verhaegen, M.; Kanev, S. Estimation and robustness analysis of actuator faults based on Kalman filtering. In proceedings of the 5th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes, Washington, DC, USA, 9–11 June 2003; pp. 241–246.
- Dobrila, C.; Stefansen, R. Fault Tolerant Wind Turbine Control. Master’s Thesis, Technical University of Denmark, Kgl. Lyngby, Denmark, 31 August 2007. [Google Scholar]
- Eun, Y.; Kim, J.H.; Kim, K.; Cho, D.I. Discrete-time variable structure controller with a decoupled disturbance compensator and its application to a CNC servomechanism. IEEE Trans. Control Syst. Technol. 1999, 7, 414–423. [Google Scholar]
- Jonkman, J. National Wind Technology Center Computer-Aided Engineering Tools (FAST). Available online: https://nwtc.nrel.gov/FAST (accessed on 7 May 2015).
- Jonkman, J.M.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; Technical Report; National Renewable Energy Laboratory: Golden, CO, USA, 2009. [Google Scholar]
- Kelley, N.; Jonkman, B. National Wind Technology Center Computer-Aided Engineering Tools (Turbsim), Last modified 30 May 2013. Available online: https://nwtc.nrel.gov/TurbSim (accessed on 7 May 2015).
- Vidal, Y.; Acho, L.; Luo, N.; Zapateiro, M.; Pozo, F. Power Control Design for Variable-Speed Wind Turbines. Energies 2012, 5, 3033–3050. [Google Scholar] [CrossRef]
- Boukhezzar, B.; Lupu, L.; Siguerdidjane, H.; Hand, M. Multivariable control strategy for variable speed, variable pitch wind turbines. Renew. Energy 2007, 32, 1273–1287. [Google Scholar] [CrossRef]
- Hofmann, J.; Dittmer, A. Model-based control of the flying helicopter simulator: Evaluating and optimizing the feedback controller. CEAS Aeronaut. J. 2011, 2, 43–56. [Google Scholar] [CrossRef]
- Gao, W.; Wang, Y.; Homaifa, A. Discrete-time variable structure control systems. IEEE Trans. Ind. Electron. 1995, 42, 117–122. [Google Scholar]
- Hu, T.; Lin, Z. Control Systems with Actuator Saturation: Analysis and Design; Springer Science & Business Media: Boston, MA, USA, 2001. [Google Scholar]
- Galeani, S.; Tarbouriech, S.; Turner, M.; Zaccarian, L. A tutorial on modern anti-windup design. Eur. J. Control 2009, 15, 418–440. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vidal, Y.; Tutivén, C.; Rodellar, J.; Acho, L. Fault Diagnosis and Fault-Tolerant Control of Wind Turbines via a Discrete Time Controller with a Disturbance Compensator. Energies 2015, 8, 4300-4316. https://doi.org/10.3390/en8054300
Vidal Y, Tutivén C, Rodellar J, Acho L. Fault Diagnosis and Fault-Tolerant Control of Wind Turbines via a Discrete Time Controller with a Disturbance Compensator. Energies. 2015; 8(5):4300-4316. https://doi.org/10.3390/en8054300
Chicago/Turabian StyleVidal, Yolanda, Christian Tutivén, José Rodellar, and Leonardo Acho. 2015. "Fault Diagnosis and Fault-Tolerant Control of Wind Turbines via a Discrete Time Controller with a Disturbance Compensator" Energies 8, no. 5: 4300-4316. https://doi.org/10.3390/en8054300