
A Novel Pitch Control System of a Large Wind Turbine Using Two-Degree-of-Freedom Motion Control with Feedback Linearization Control

Abstract
:1. Introduction
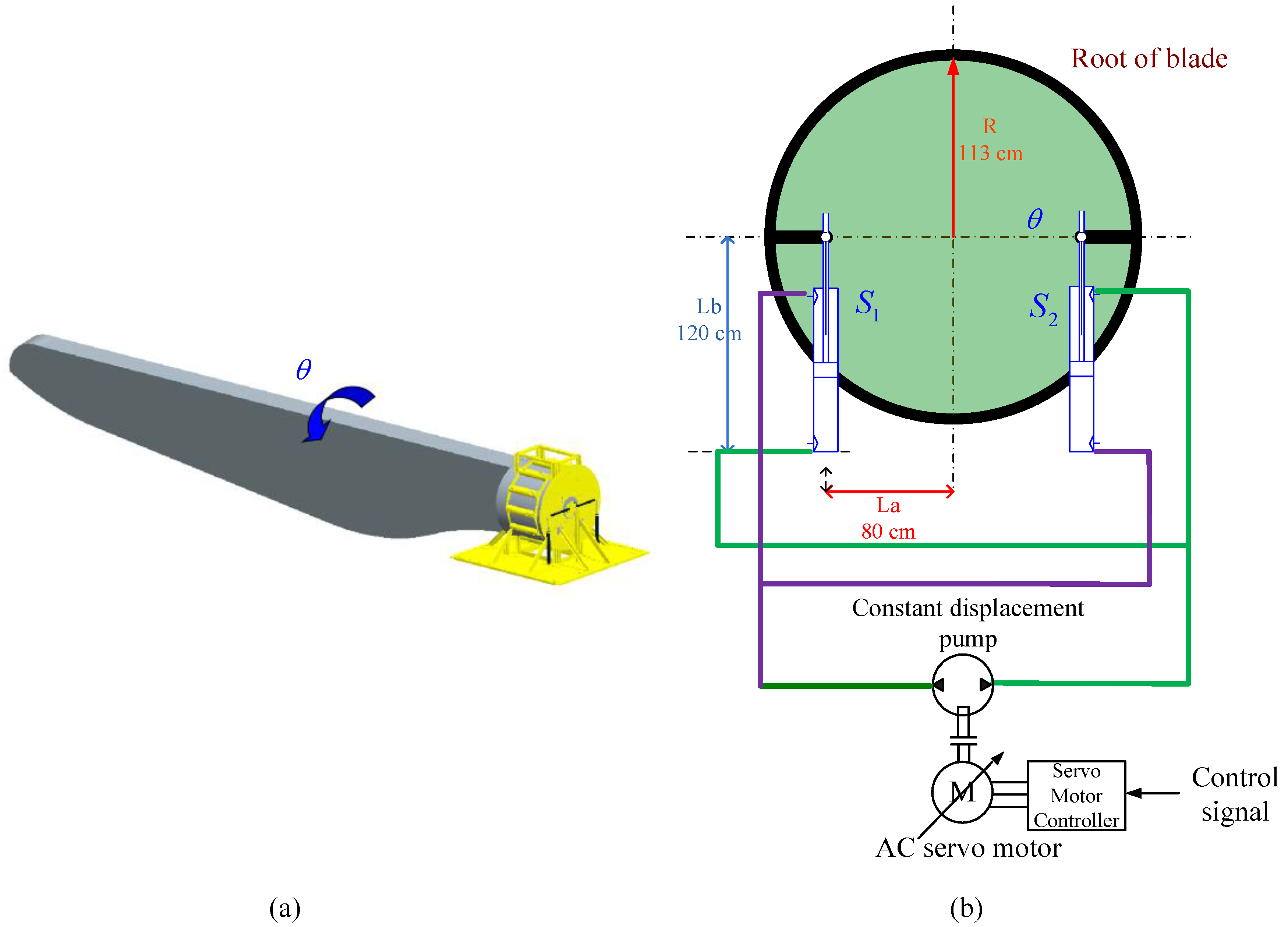
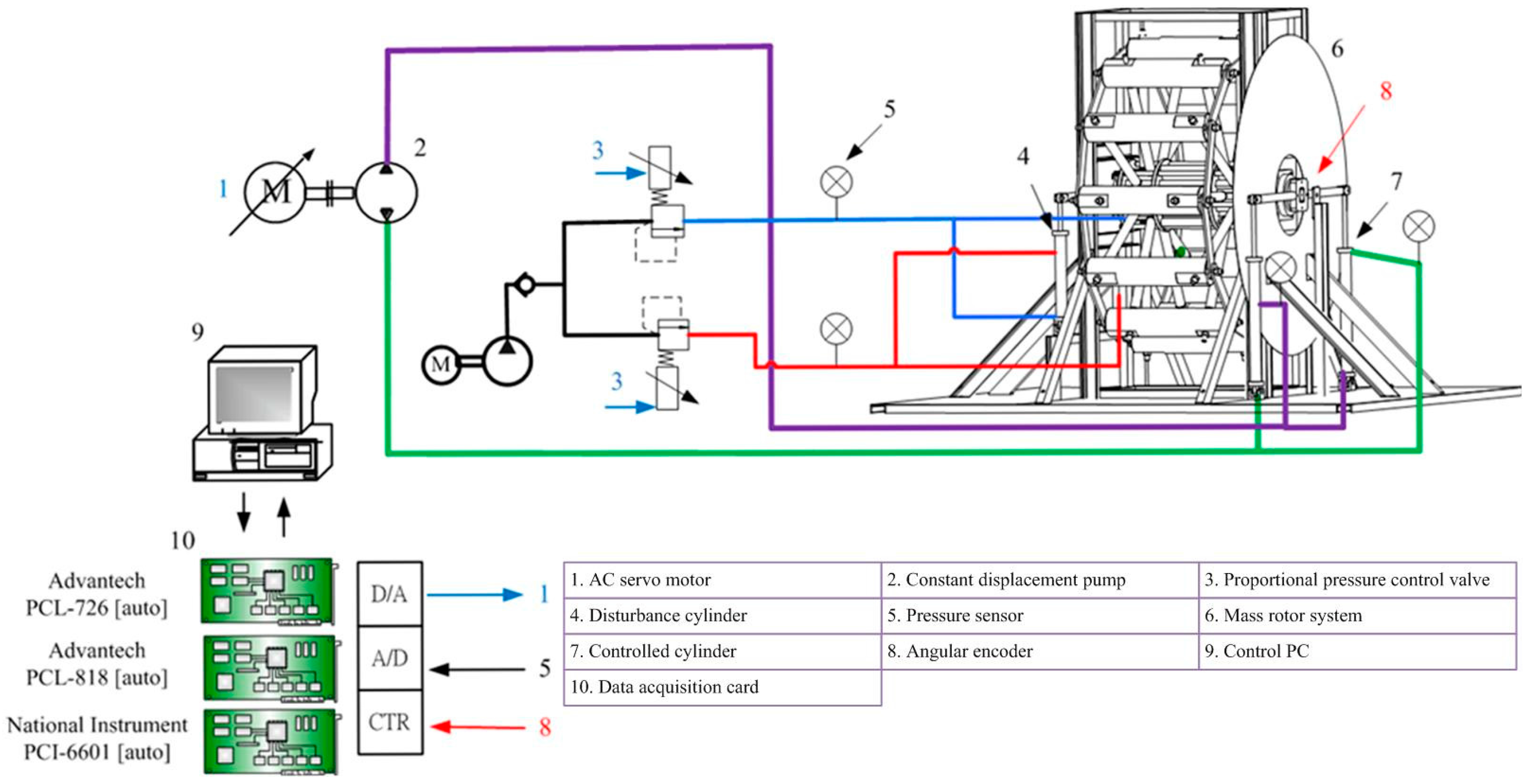
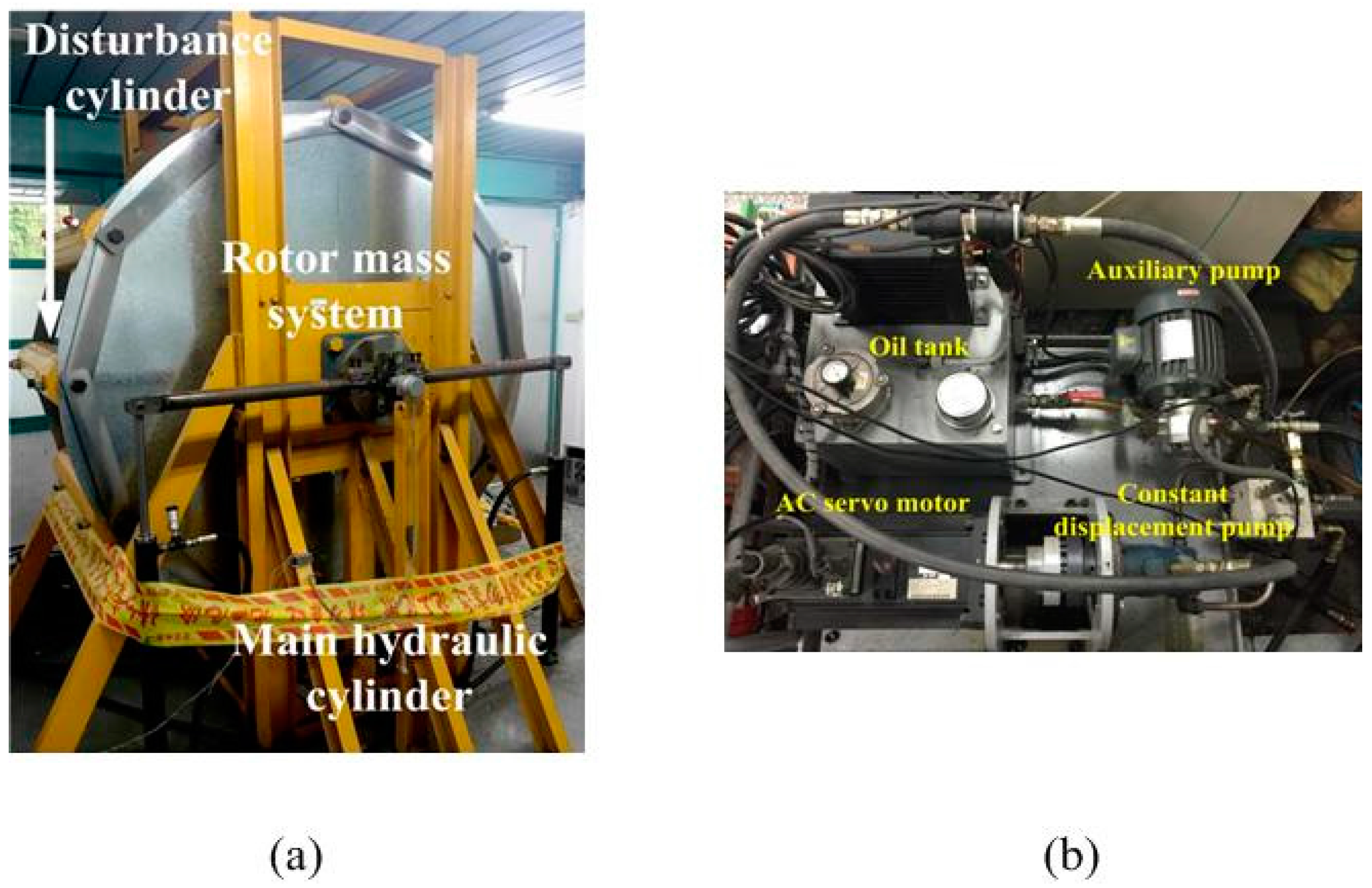
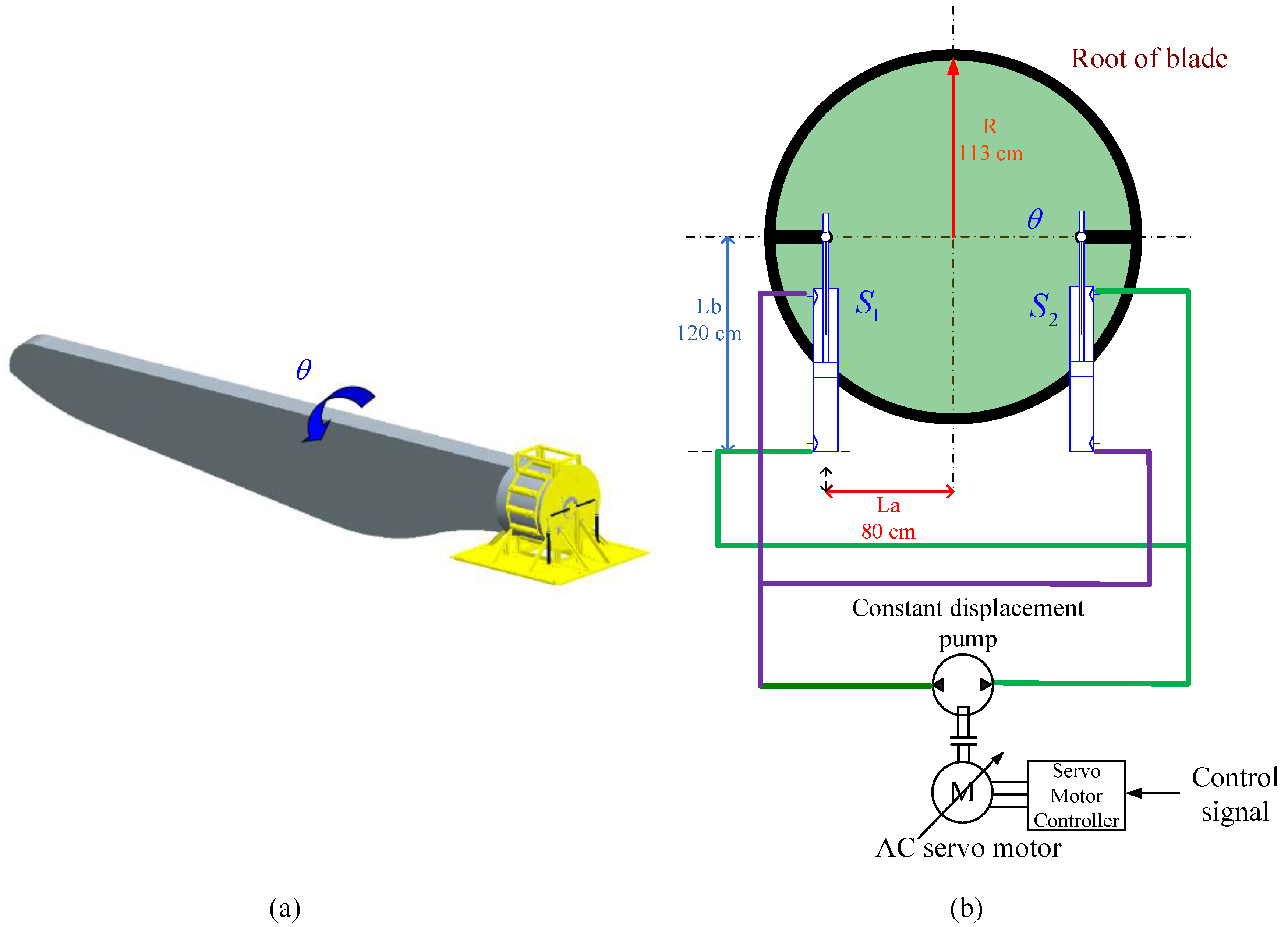
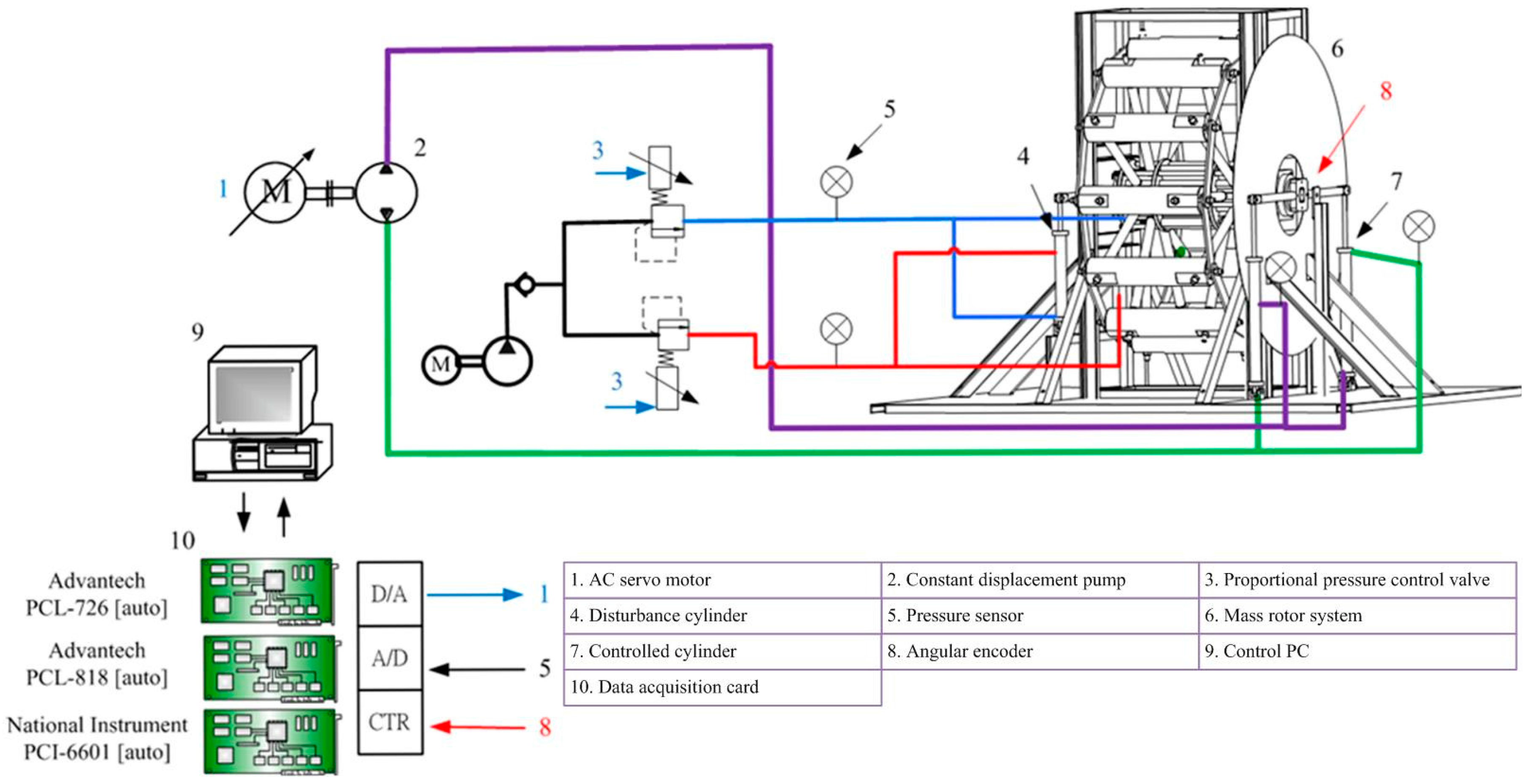
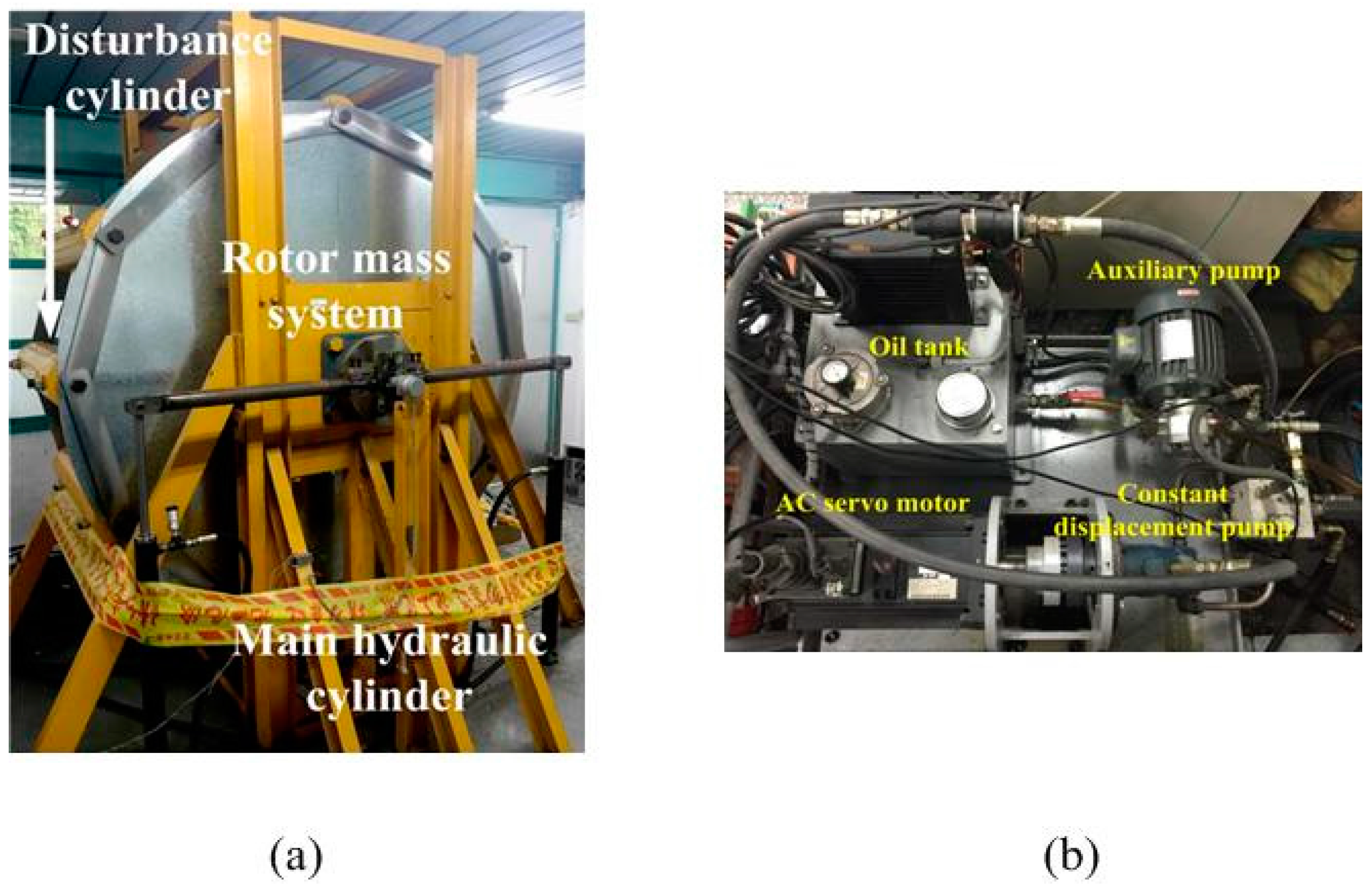
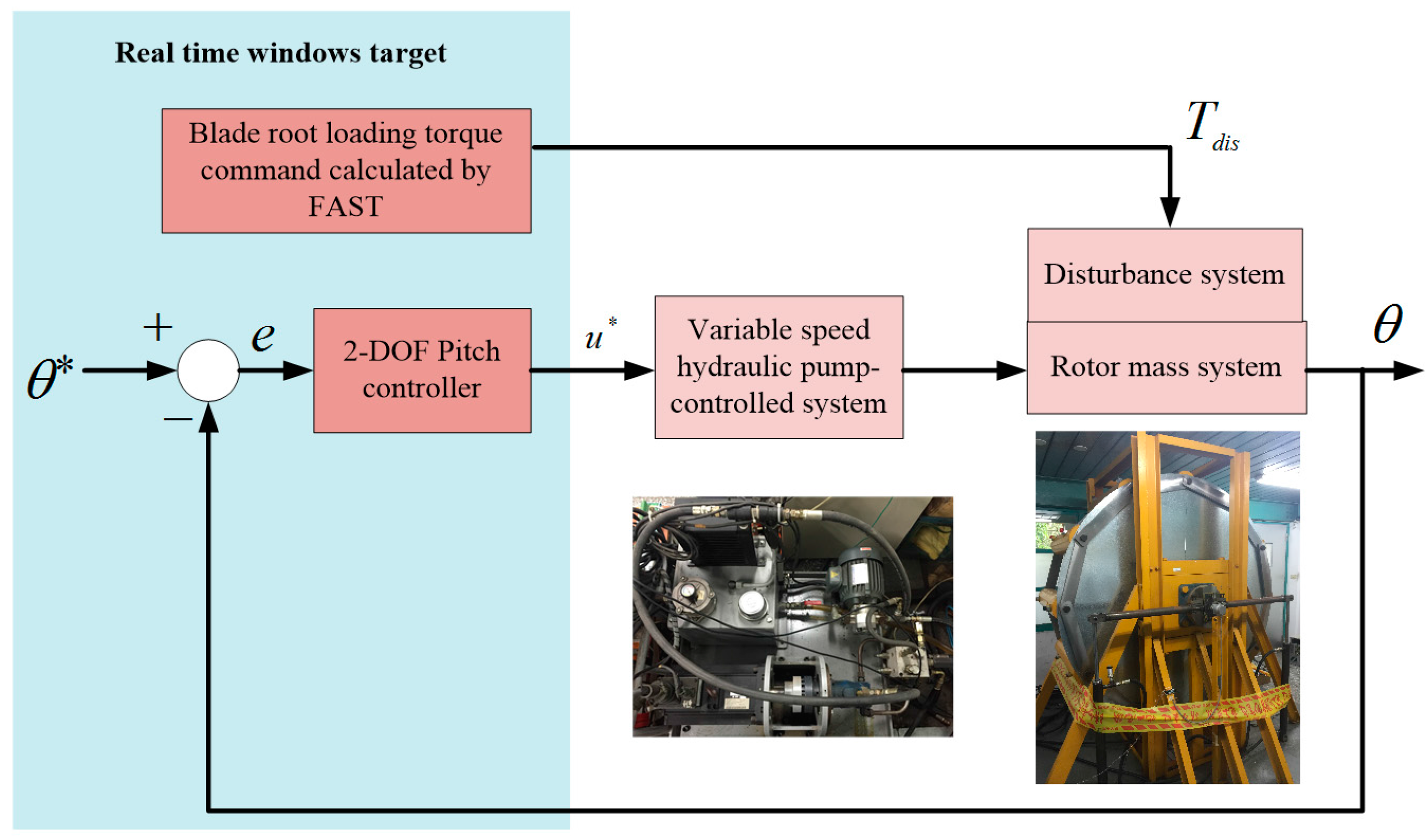
2. Test Rig of Novel Hydraulic Pitch Control System
3. Modeling of Novel Hydraulic Pitch Control System
3.1. Modeling of Hydraulic Pump-Controlled System
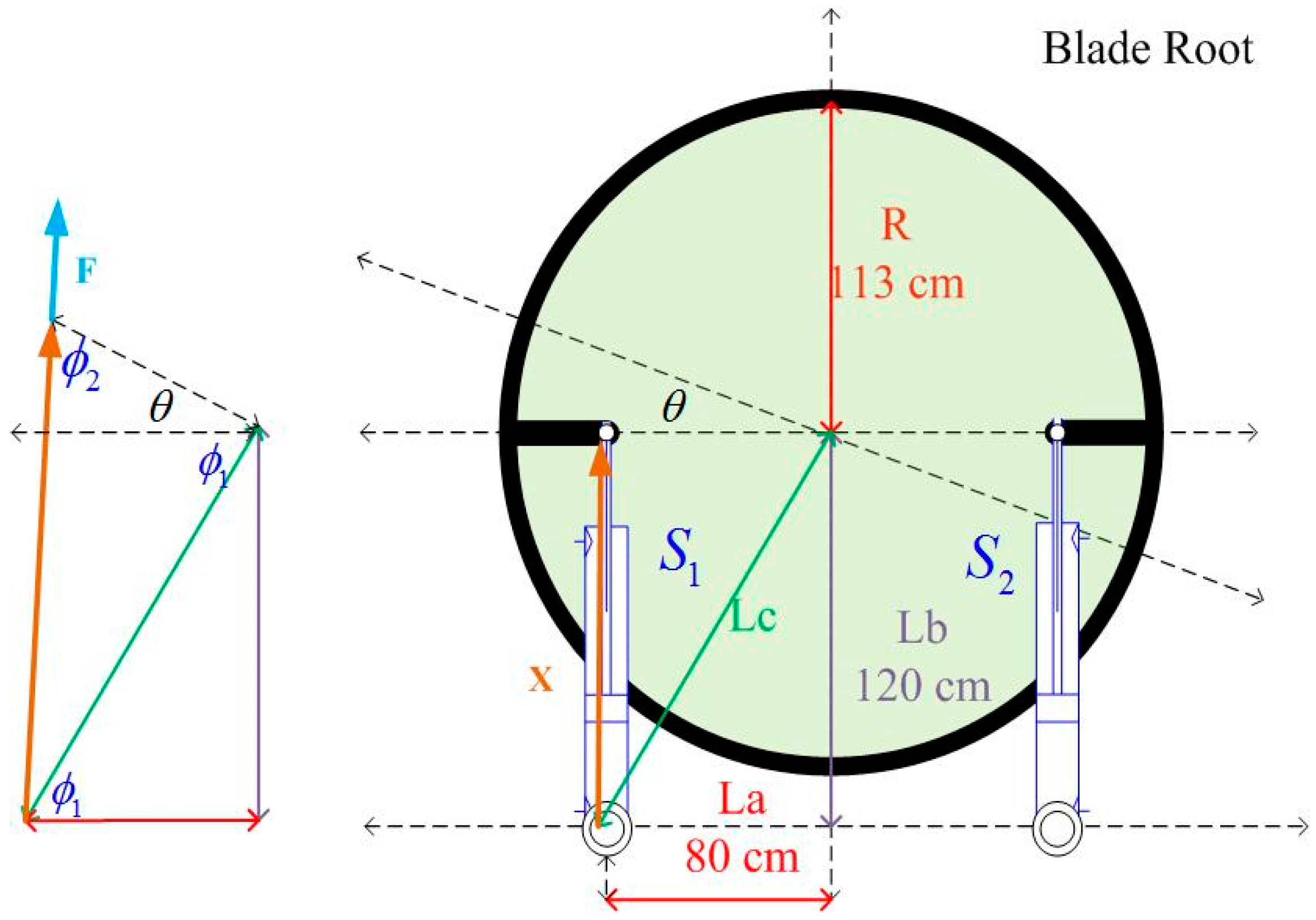
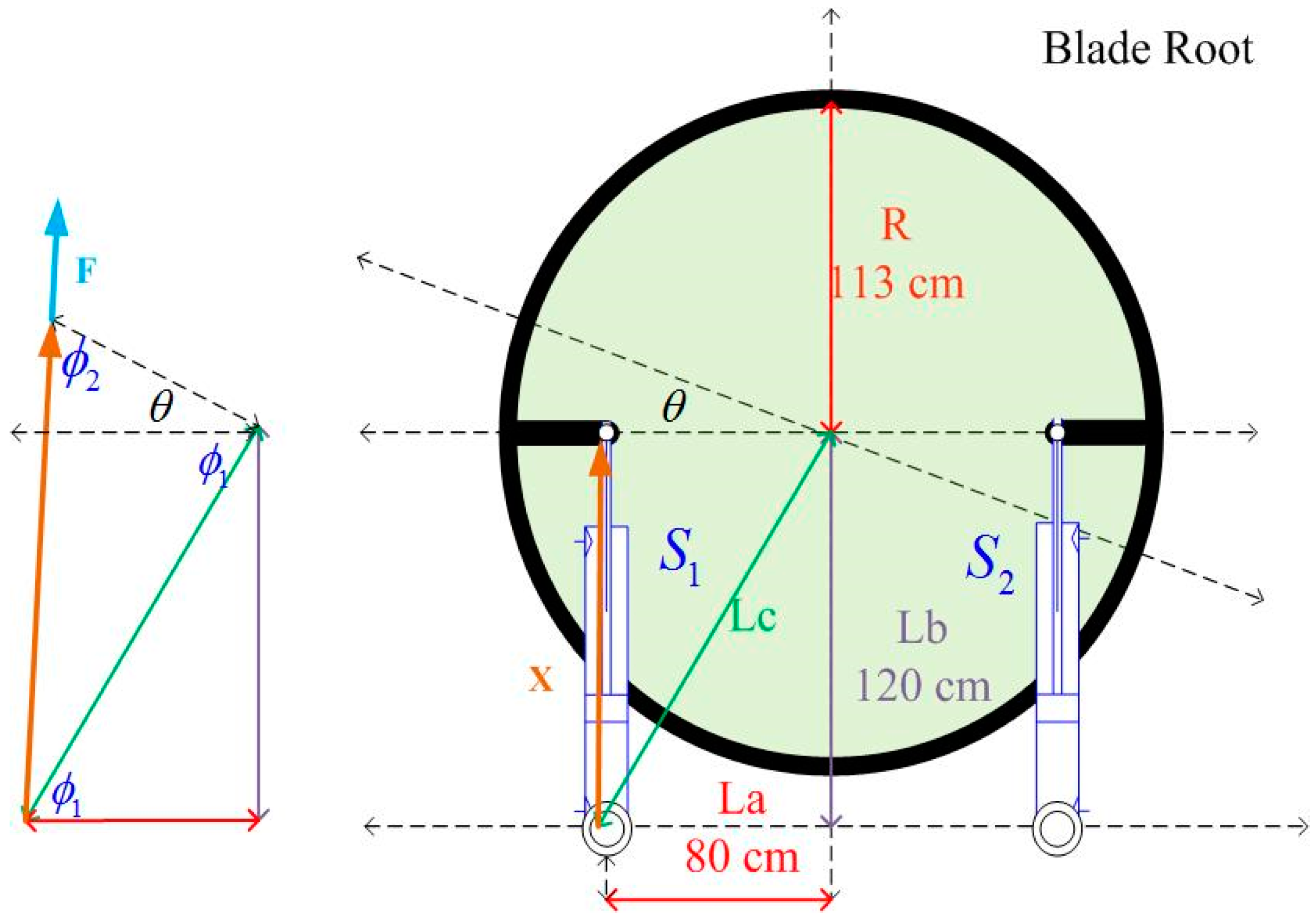
3.2. The Mechanism of the Hydraulic Pitch Control System
3.3. Modeling of Disturbance System
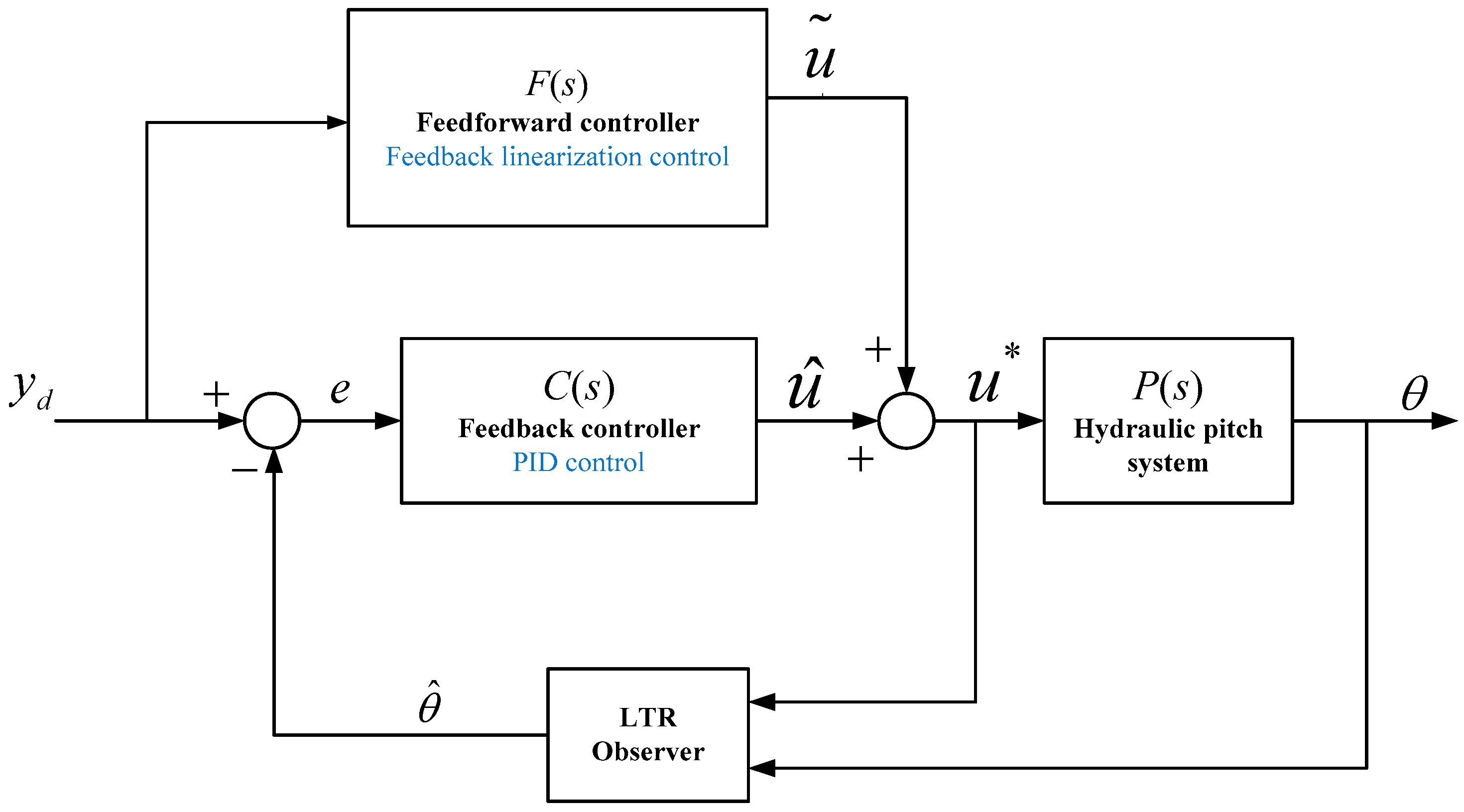
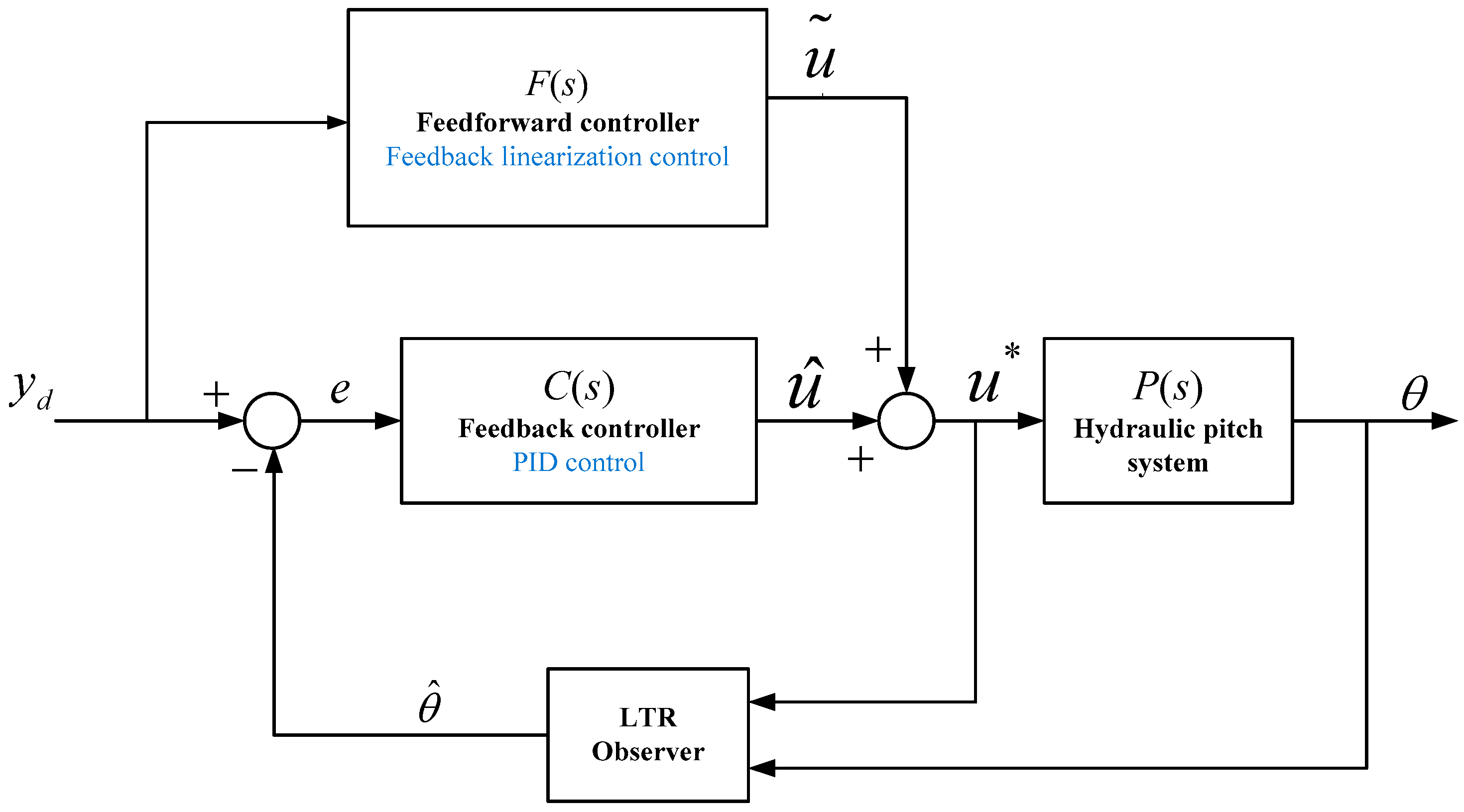
4. Pitch Controller Design
4.1. Theory of Feedback Linearization Control
4.2. Feedback Linearization Control Design for Pitch Controller
4.2.1. Stability Analysis
4.2.2. Controller Design
4.3. Feedback Linearization Control Design for Pitch Controller
5. Experiments of Novel Hydraulic Pitch Control System
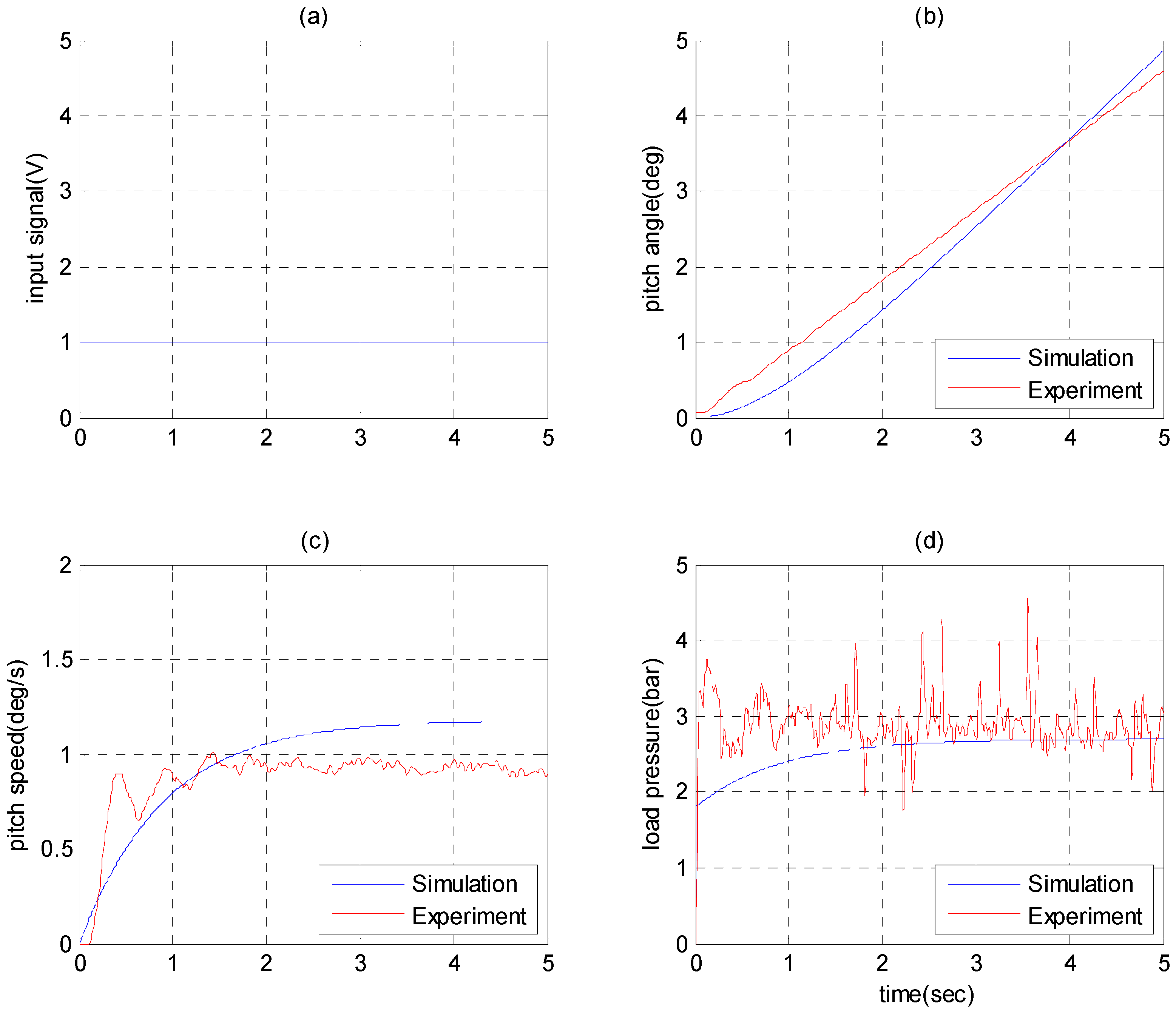
5.1. Model Validation
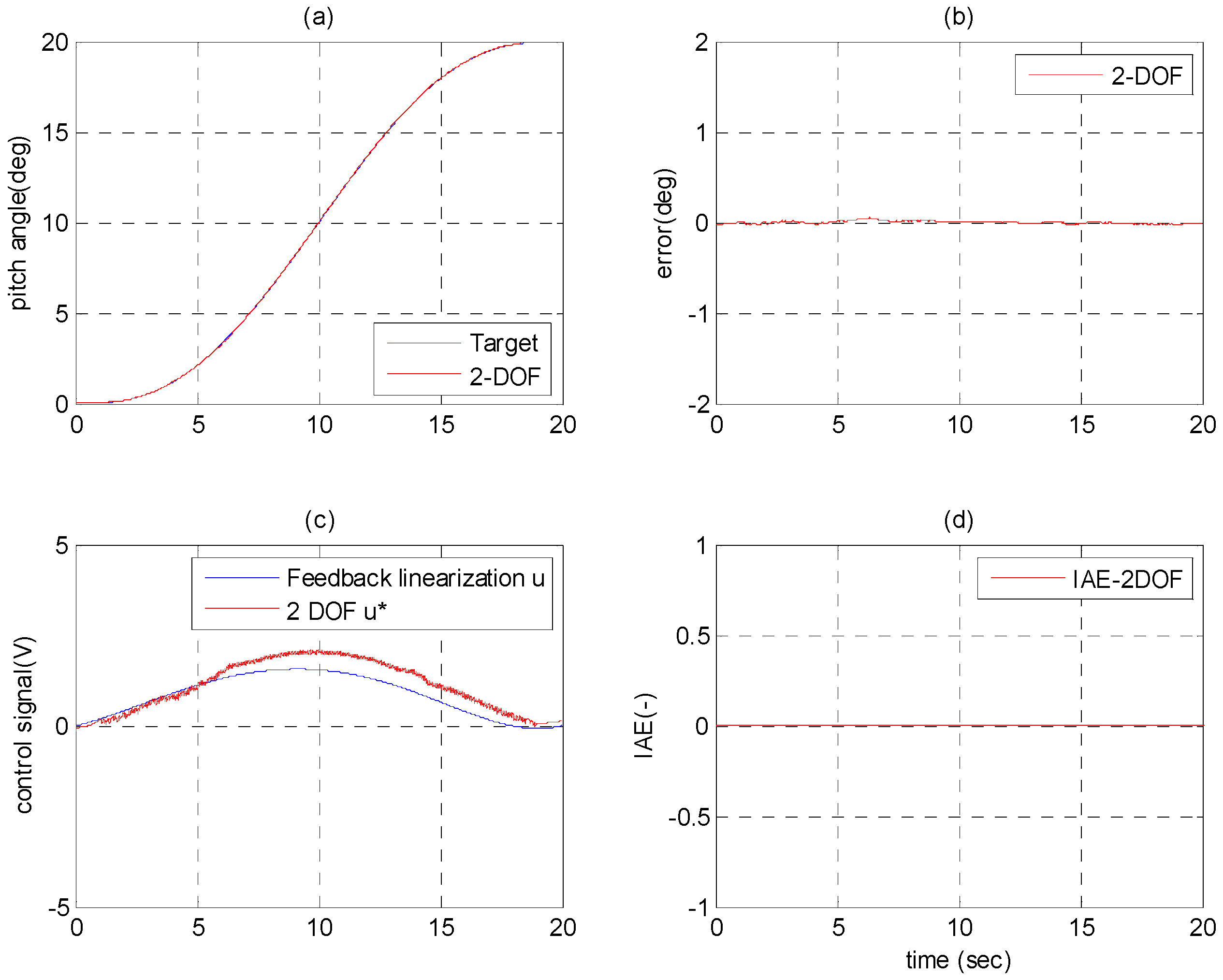
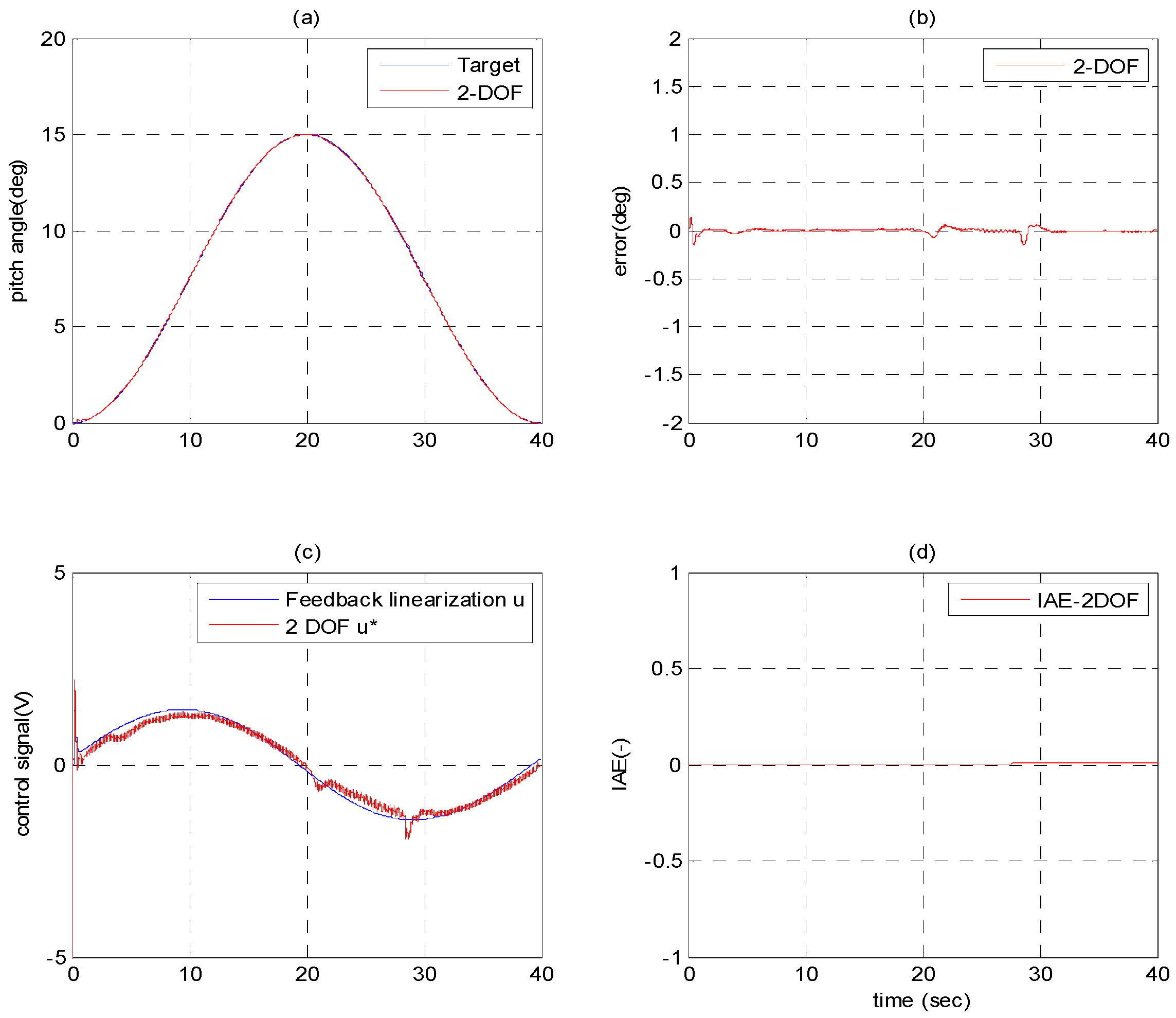
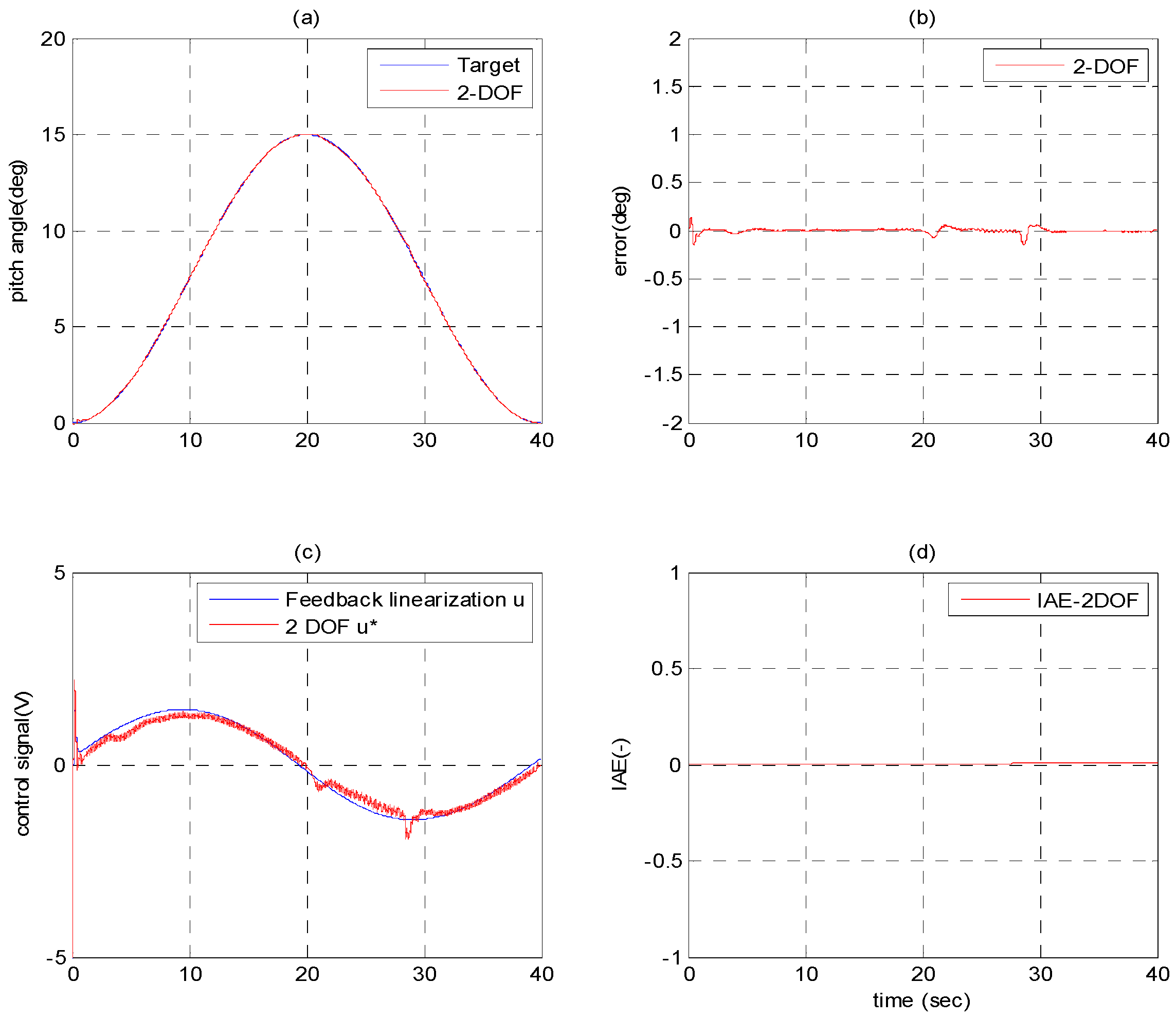
5.2. Experiments of Path-Positioning Control and Path Control
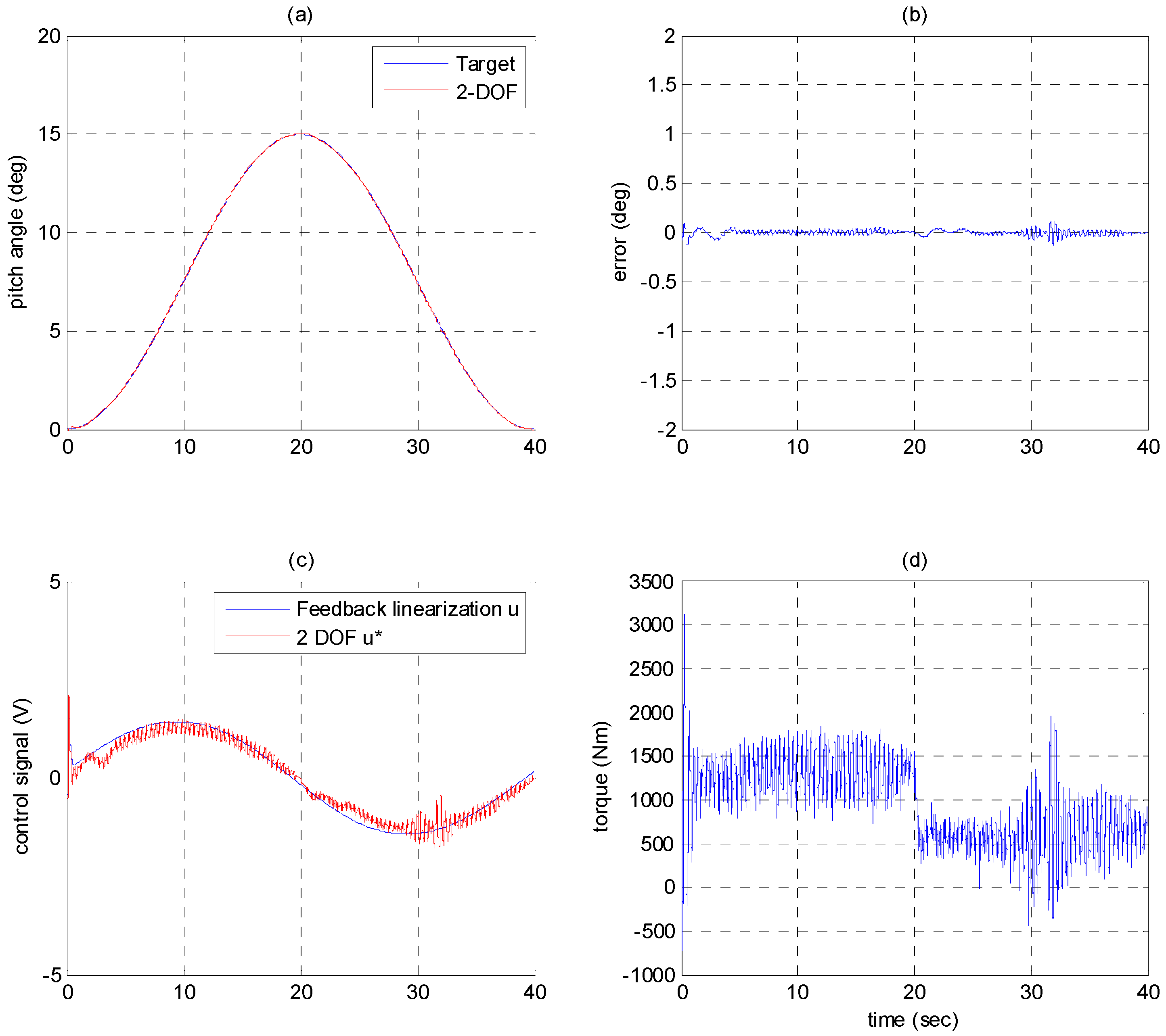
5.3. Disturbance Rejection of Pitch Control System
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| FAST | Fatigue, Aerodynamics, Structures and Turbulence |
| CFD | Computational Fluid Dynamics |
| DOF | Degree Of Freedom |
| IAE | Integral of Absolute Error |
| AeroDyn | AeroDynamic |
| AC | Alternating Current |
| MATLAB | MATrix LABoratory |
References
- Wilmshurst, S.M.B. Control strategies for wind turbines. Wind Eng. 1988, 12, 236–249. [Google Scholar]
- Freeman, J.B.; Balas, M.J. Direct model reference adaptive control of a variable speed horizontal axis wind turbines. Wind Eng. 1988, 22, 25–33. [Google Scholar]
- Petru, T.; Thiringer, T. Modeling of wind turbines for power system studies. IEEE Trans. Power Syst. 2002, 17, 1132–1139. [Google Scholar] [CrossRef]
- Huang, C.; Li, F.; Jin, Z. Maximum power point tracking strategy for large-scale wind generation systems considering wind turbine dynamics. IEEE Trans. Ind. Electron. 2015, 62, 2530–2539. [Google Scholar] [CrossRef]
- Kim, K.H.; Van, T.L.; Lee, D.C.; Song, S.H.; Kim, E.H. Maximum Output Power Tracking Control in Variable-Speed Wind Turbine Systems Considering Rotor Inertial Power. IEEE Trans. Ind. Electron. 2013, 60, 3207–3217. [Google Scholar] [CrossRef]
- Chen, J.; Chen, J.; Gong, C. New Overall Power Control Strategy for Variable-Speed Fixed-Pitch Wind Turbines within the Whole Wind Velocity Range. IEEE Trans. Ind. Electron. 2013, 60, 2652–2660. [Google Scholar] [CrossRef]
- Jones, R.; Smith, G.A. High quality mains power from variable speed wind turbines. Wind Eng. 1994, 18, 45–49. [Google Scholar]
- Idan, M.; Lior, D. Continuously variable speed wind turbine: Transmission concept and robust control. Wind Eng. 2000, 24, 151–167. [Google Scholar] [CrossRef]
- Song, Y.D.; Dhinakaran, B.; Bao, X.Y. Variable speed control of wind turbines using nonlinear and adaptive algorithms. J. Wind Eng. Ind. Aerodyn. 2000, 85, 293–308. [Google Scholar] [CrossRef]
- Boukhezar, B.; Siguerdidjane, H. Nonlinear Control of Variable Speed Wind Turbines without wind speed measurement. In Proceedings of the 44th IEEE Conference on Decision and Control 2005, Seville, Spain, 12–15 December 2005; pp. 3456–3461.
- Camblong, H.; Tapia, G.; Rodriguez, M. Robust digital control of a wind turbine for rated-speed and variable-power operation regime. IEE Proc. Control Theory Appl. 2006, 153, 81–91. [Google Scholar] [CrossRef]
- Liserre, M.; Cardenas, R.; Molinas, M.; Rodriguez, J. Overview of Multi-MW Wind Turbines and Wind Parks. IEEE Trans. Ind. Electron. 2011, 58, 1081–1095. [Google Scholar] [CrossRef]
- Muljadi, E.; Butterfield, C.P. Pitch-controlled variable-speed wind turbine generation. IEEE Trans. Ind. Appl. 2001, 37, 240–246. [Google Scholar] [CrossRef]
- Duong, M.Q.; Grimaccia, F.; Leva, S.; Mussetta, M.; Ogliari, E. Pitch angle control using hybrid controller for all operating regions of SCIG wind turbine system. Renew. Energy 2014, 70, 197–203. [Google Scholar] [CrossRef]
- Xiao, S.; Geng, H.; Yang, G. Non-linear pitch control of wind turbines for tower load reduction. IET Renew. Power Gener. 2014, 8, 786–794. [Google Scholar] [CrossRef]
- Wang, J.; Tse, N.; Gao, Z. Synthesis on PI-based pitch controller of large wind turbines generator. Energy Convers. Manag. 2011, 52, 1288–1294. [Google Scholar] [CrossRef]
- Gao, R.; Gao, Z. Pitch control for wind turbine systems using optimization, estimation and compensation. Renew. Energy 2016, 91, 501–515. [Google Scholar] [CrossRef]
- Zamani, M.H.; Fathi, S.H.; Riahy, G.H.; Abedi, M.; Abdolghani, N. Improving Transient Stability of Grid-Connected Squirrel-Cage Induction Generators by Plugging Mode Operation. IEEE Trans. Energy Conver. 2012, 27, 707–714. [Google Scholar] [CrossRef]
- Helduser, S. Electric-hydrostatic drive—An innovative energy-saving power and motion control system. Proc. Inst. Mech. Eng. 1999, 213, 427–439. [Google Scholar] [CrossRef]
- Habibi, S.; Goldenberg, A. Design of a new high performance electro-hydraulic actuator. In Proceedings of the 1999 IEEE/ASME International Conference on Advanced Mechatronics, Atlanta, GA, USA, 19–23 September 1999; pp. 227–232.
- Chiang, M.H. A novel pitch control system for a wind turbine driven by a variable-speed pump-controlled hydraulic servo system. Mechatronics 2011, 21, 753–761. [Google Scholar] [CrossRef]
- Chiang, M.H.; Wang, C.S.; Chen, C.S. Intelligent Pitch Control for a 2MW Wind Turbine. Int. J. Fuzzy Syst. 2012, 14, 89–96. [Google Scholar]
- Krener, A.J. On the Equivalence of Control Systems and the Linearization of Nonlinear Systems. SIAM J. Control 1973, 11, 670–676. [Google Scholar] [CrossRef]
- Brockett, R.W. Feedback Invariants for Nonlinear Systems. In Proceedings of the 7th IFAC Congress, Helsinki, Finland, 12–16 June 1978; pp. 1115–1120.
- Jakubczyk, B.; Respondek, W. On Linearization of Control Systems. Bull. Acad. Polonaise Sci. Ser. Sci. Math. 1980, 28, 517–522. [Google Scholar]
- Kwon, J.H.; Kim, T.H.; Jang, J.S.; Lee, I.Y. Feedback Linearization Control of a Hydraulic Servo System. In Proceedings of the 2006 SICE-ICASE International Joint Conference, Busan, Korea, 18–21 October 2006.
- Nguyen, Q.H.; Ha, Q.P.; Rye, D.C.; Durrant-Whyte, H.F. Feedback linearization control for electrohydraulic systems of a robotic excavator. In Proceedings of the Australian Conference for Robotics and Automation, Auckland, New Zealand, 6–8 December 2006.
- Boerlage, M.; Steinbucht, M.; Lambrechtst, P.; Wal, M. Model-based feedforward for motion systems. In Proceedings of the 2003 IEEE Conference on Control Applications, Istanbul, Turkey, 23–25 June 2003; pp. 1158–1163.
- Devasia, S. Robust inversion-based feedforward controllers for output tracking under plant uncertainty. In Proceedings of the 2000 American Control Conference, Chicago, IL, USA, 28–30 June 2000; pp. 497–502.
- Torfs, D.E.; Vuerinckx, R.; Swevers, J.; Schoukens, J. Comparison of two feedforward design methods aiming at accurate trajectory tracking of the end point of a flexible robot arm. IEEE Trans. Control Syst. Technol. 1998, 6, 2–14. [Google Scholar] [CrossRef]
- Jonkman, J.M.; Buhl, M.L., Jr. FAST User’s Guide; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2005.
- Skogestad, S.; Postlethwaite, I. Multivariable Feedback Control: Analysis and Design; Wiley: New York, NY, USA, 1996. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Specification |
|---|---|
| AC servo motor | Rated rotational speed: 2000 rpm |
| Servo motor driver | Max. output power: 7.5 kW |
| Hydraulic pump | Swash plate axial piston pump Fixed displacement: 12 mL/rev |
| Hydraulic servo cylinder | Single rod double acting cylinder Max. stroke: 810 mm Piston diameter: 50 mm Rod diameter: 25 mm |
| Disturbance cylinder system | Single rod double acting cylinder Max. stroke: 400 mm Piston diameter: 50 mm Rod diameter: 25 mm |
| Rotor mass system | Weight: 2050 kgw Moment of inertia: 1238 kg·m2 |
| Pitch Angle (°) | 0 | 5 | 10 | |
|---|---|---|---|---|
| Wind Speed (m/s) | ||||
| 11 | 1428 (Nm) | 867 (Nm) | 141 (Nm) | |
| 12 | 1600 (Nm) | 1020 (Nm) | 280 (Nm) | |
| 13 | 1765 (Nm) | 1182 (Nm) | 445 (Nm) | |
| 14 | 1929 (Nm) | 1335 (Nm) | 574 (Nm) | |
| 15 | 2114 (Nm) | 1500 (Nm) | 730 (Nm) | |
| 16 | 2266 (Nm) | 1672 (Nm) | 900 (Nm) | |
| 17 | 2420 (Nm) | 1824 (Nm) | 1035 (Nm) | |
| 18 | 2554 (Nm) | 2000 (Nm) | 1206 (Nm) | |
| 19 | 2707 (Nm) | 2138 (Nm) | 1355 (Nm) | |
| 20 | 2830 (Nm) | 2307 (Nm) | 1547 (Nm) | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.-S.; Chiang, M.-H. A Novel Pitch Control System of a Large Wind Turbine Using Two-Degree-of-Freedom Motion Control with Feedback Linearization Control. Energies 2016, 9, 791. https://doi.org/10.3390/en9100791
Wang C-S, Chiang M-H. A Novel Pitch Control System of a Large Wind Turbine Using Two-Degree-of-Freedom Motion Control with Feedback Linearization Control. Energies. 2016; 9(10):791. https://doi.org/10.3390/en9100791
Chicago/Turabian StyleWang, Ching-Sung, and Mao-Hsiung Chiang. 2016. "A Novel Pitch Control System of a Large Wind Turbine Using Two-Degree-of-Freedom Motion Control with Feedback Linearization Control" Energies 9, no. 10: 791. https://doi.org/10.3390/en9100791