Automatic Geographic Object Based Mapping of Streambed and Riparian Zone Extent from LiDAR Data in a Temperate Rural Urban Environment, Australia





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Riparian Zones
1.2. Remote Sensing of Riparian Zones
1.3. Geographic Object Based Image Analysis
2. Data and Methods
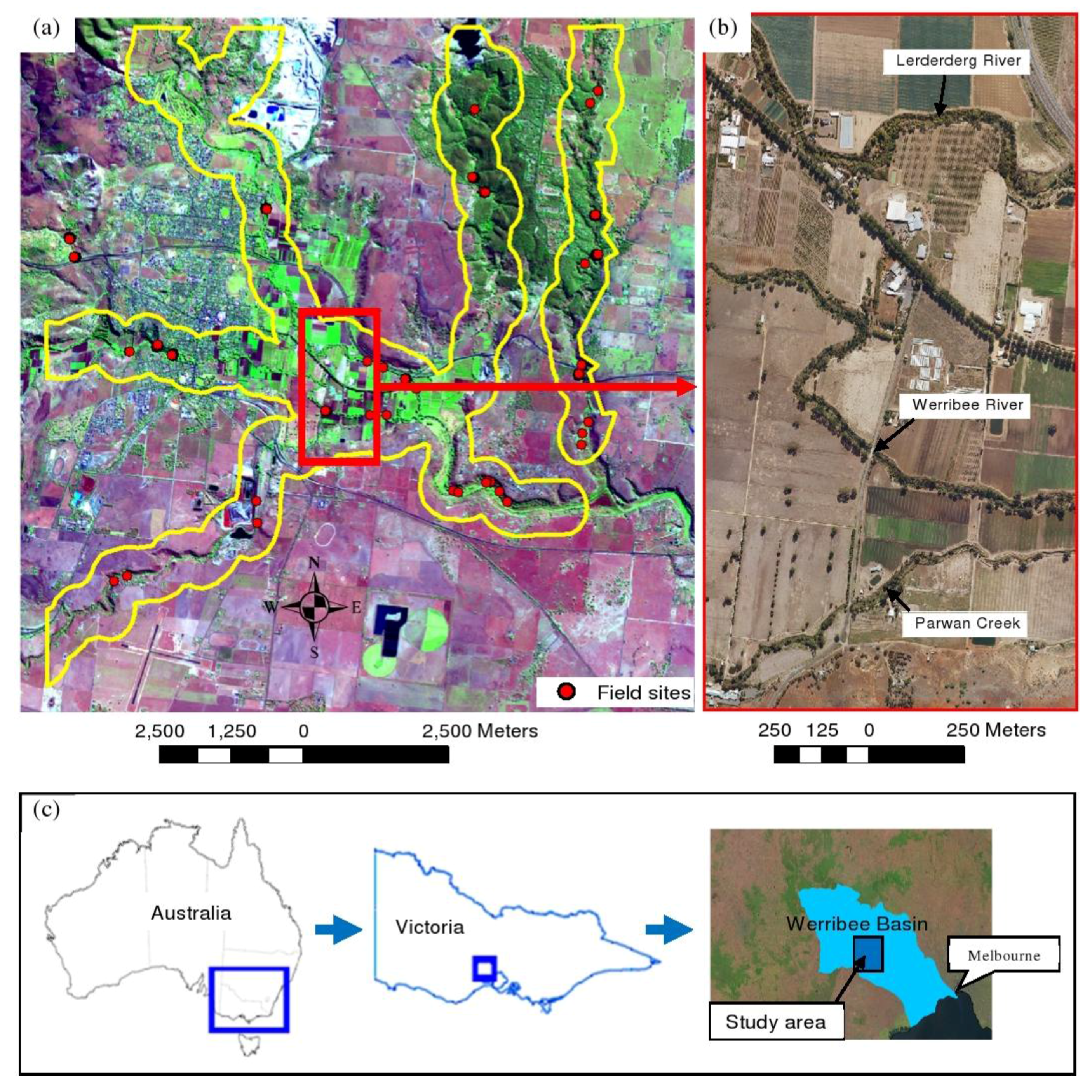
2.1. Study Area
2.2. Field Data Acquisition

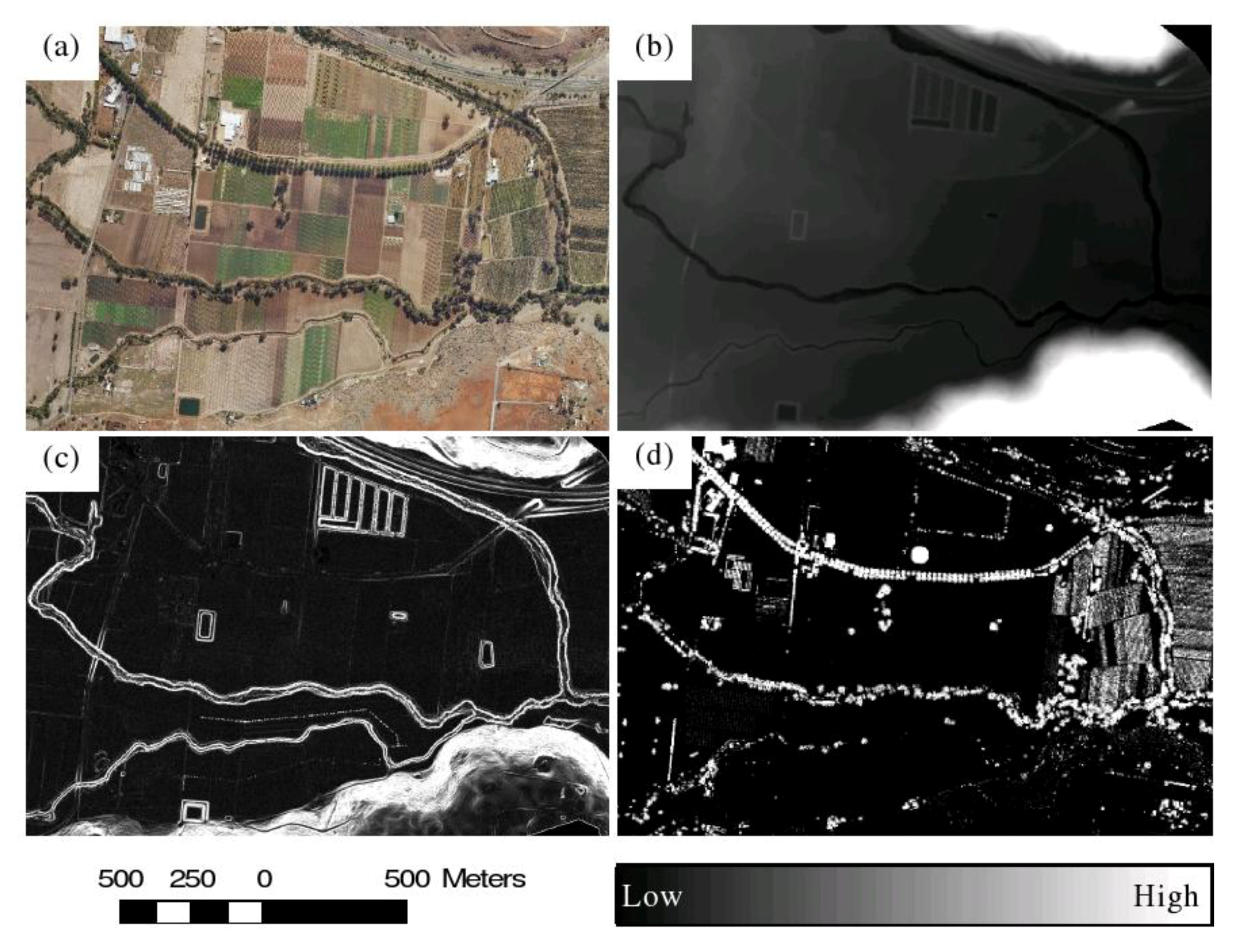
2.3. LiDAR Data Acquisition and Preparation
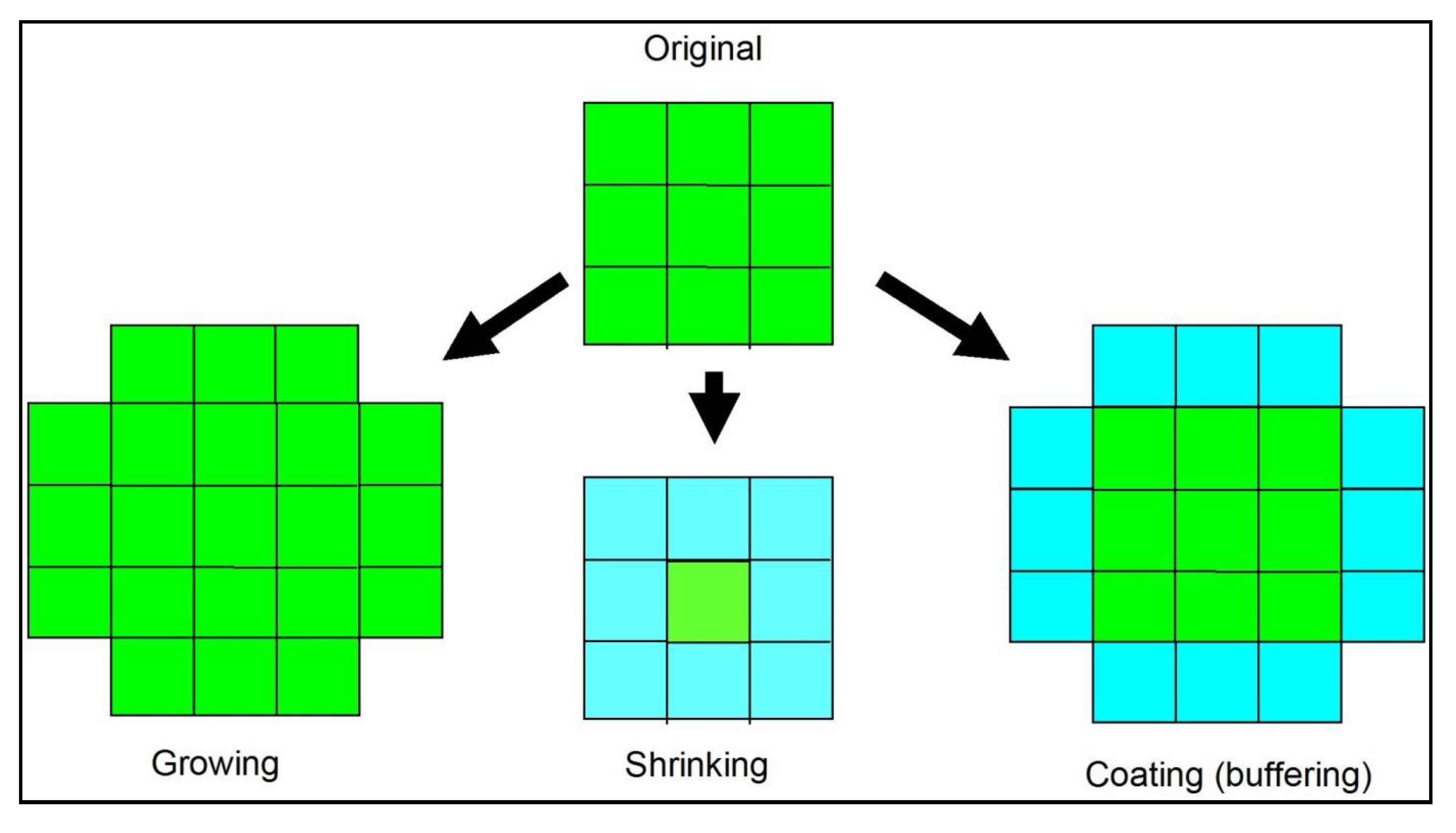
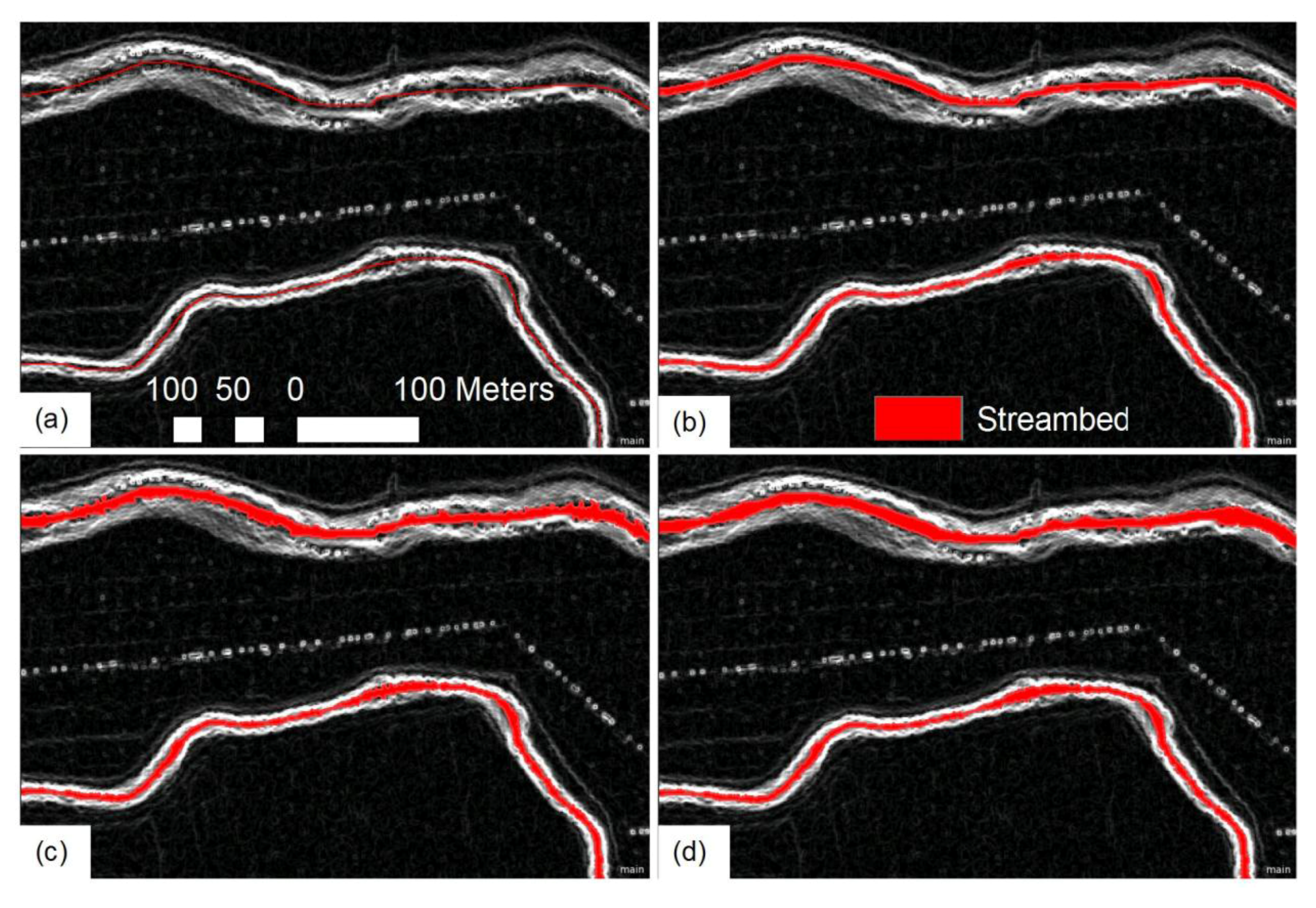
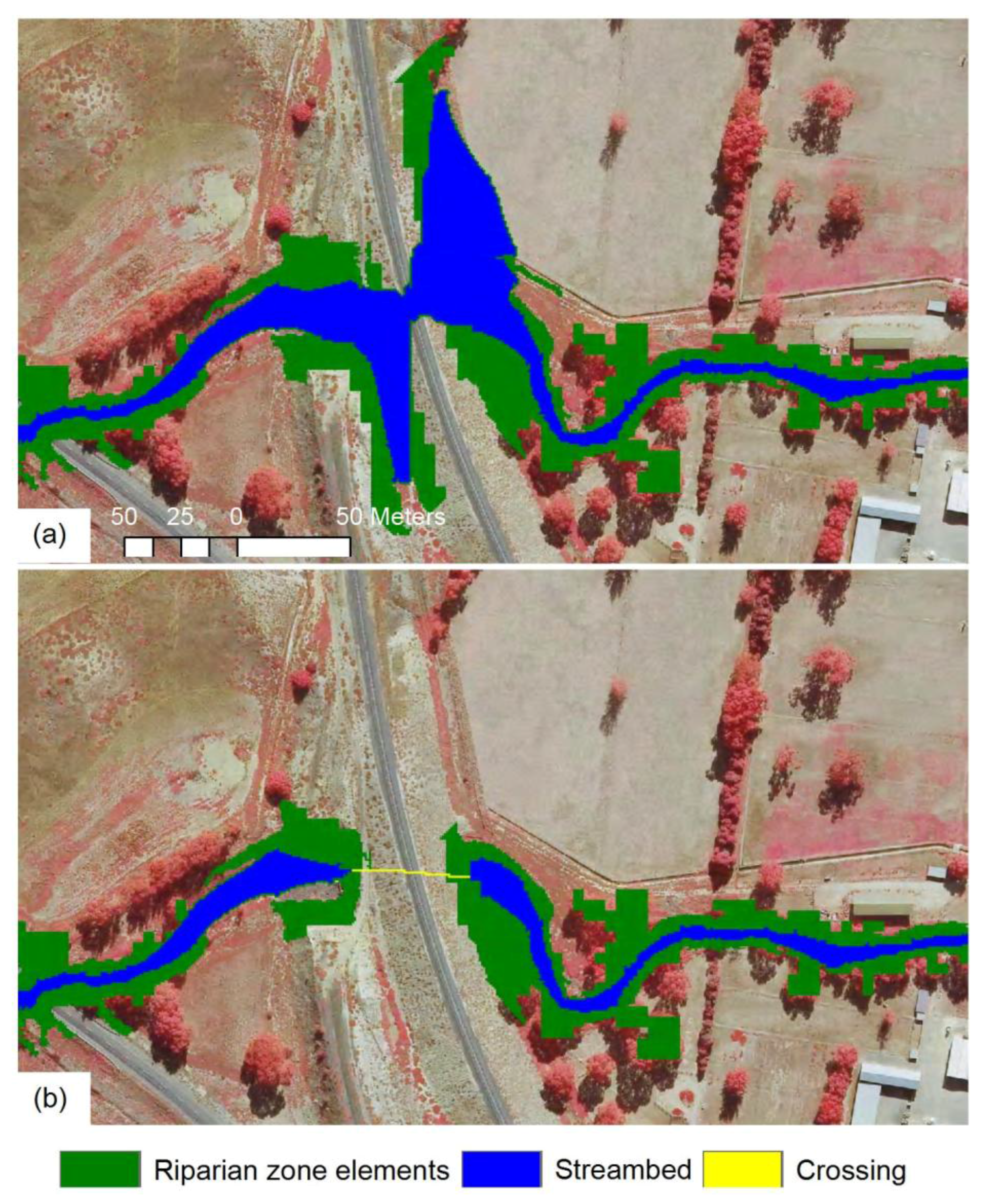
2.4. Classifying Streambeds



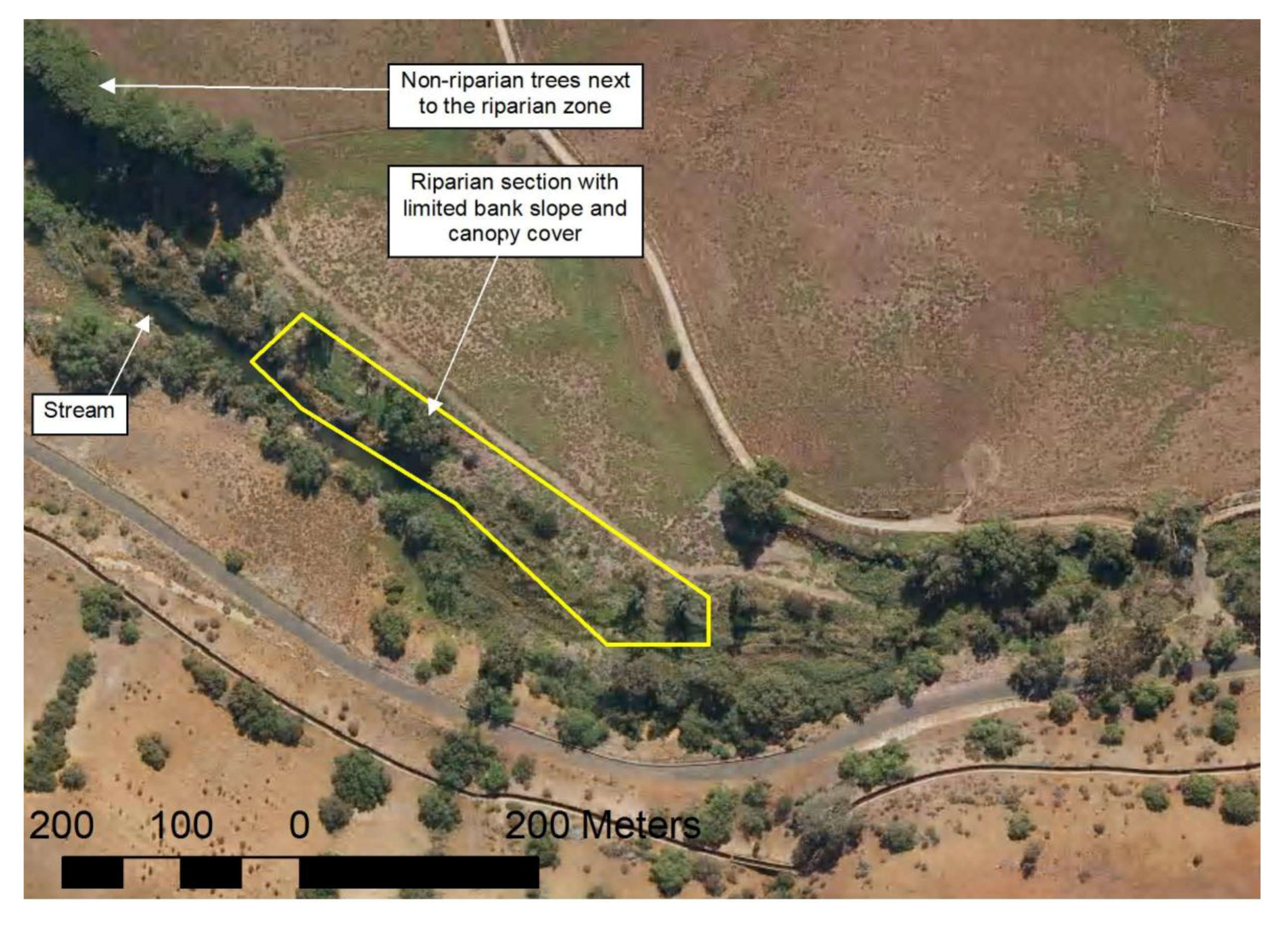
2.5. Classifying Riparian Zones


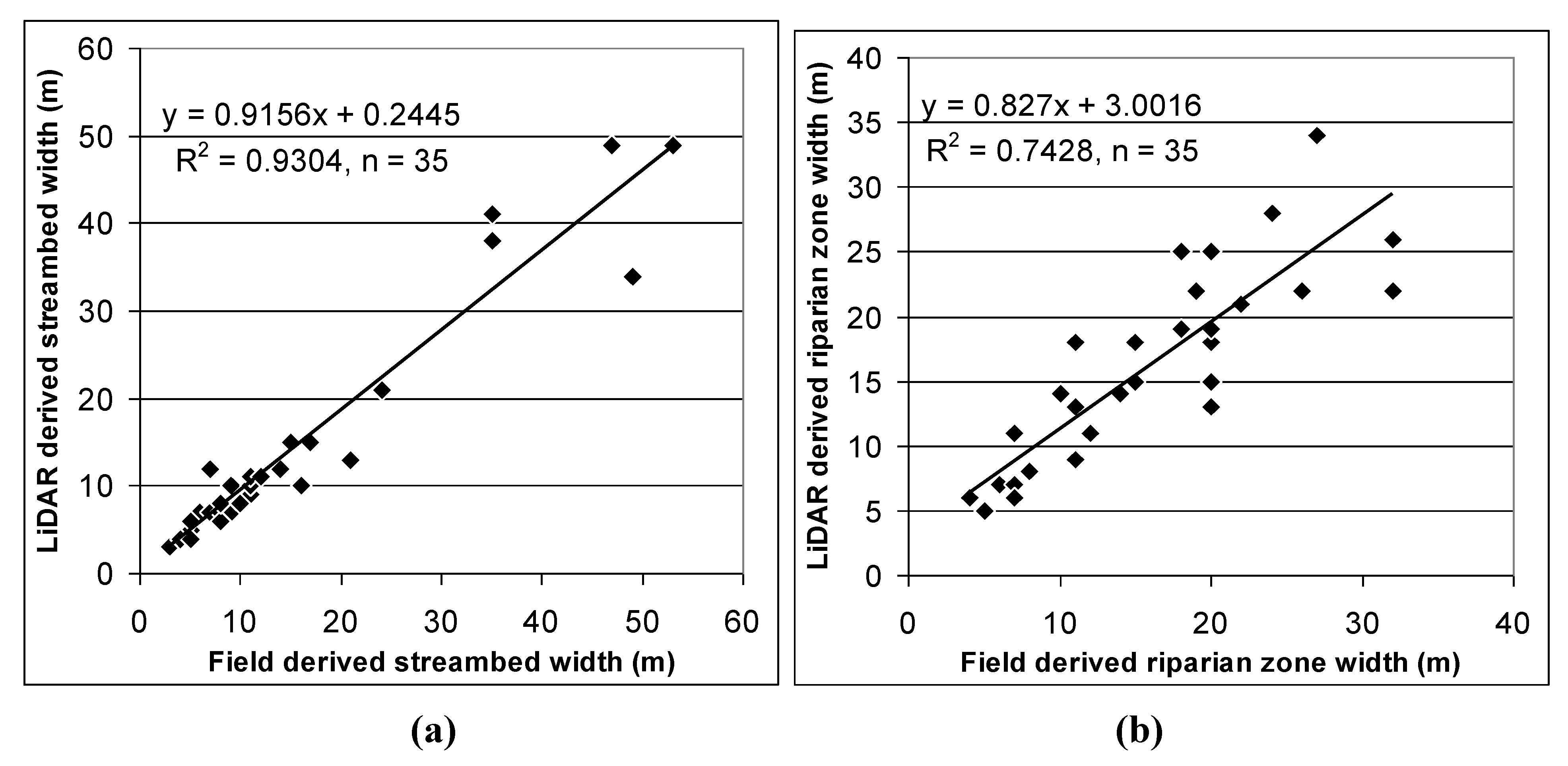
2.6. Validation
3. Results and Discussion


4. Conclusions

Acknowledgements
References
- Naiman, R.J.; Decamps, H. The ecology of interfaces: Riparian zones. Ann. Rev. Ecol. Syst. 1997, 28, 621–658. [Google Scholar] [CrossRef]
- Apan, A.A.; Raine, S.R.; Paterson, M.S. Mapping and analysis of changes in the riparian landscape structure of the Lockyer Valley catchment, Queensland, Australia. Landscape Urban Plan. 2002, 59, 43–57. [Google Scholar] [CrossRef]
- Werren, G.; Arthington, A. The assessment of riparian vegetation as an indicator of stream condition, with particular emphasis on the rapid assessment of flow-related impacts. In Landscape Health of Queensland; Shapcott, A., Playford, J., Franks, A.J., Eds.; The Royal Society of Queensland: St Lucia, QLD, Australia, 2002; pp. 194–222. [Google Scholar]
- Johansen, K.; Phinn, S.; Lowry, J.; Douglas, M. Quantifying indicators of riparian condition in Australian tropical savannas: Integrating high spatial resolution imagery and field survey data. Int. J. Remote Sens. 2008, 29, 7003–7028. [Google Scholar] [CrossRef]
- Johansen, K.; Phinn, S.; Dixon, I.; Douglas, M.; Lowry, J. Comparison of image and rapid field assessments of riparian zone condition in Australian tropical savannas. For. Ecol. Manage. 2007, 240, 42–60. [Google Scholar] [CrossRef]
- Hurtt, G.; Xiao, X.; Keller, M.; Palace, M.; Asner, G.P.; Braswell, R.; Brondizio, E.S.; Cardoso, M.; Carvalho, C.J.R.; Fearon, M.G.; et al. IKONOS imagery for the Large Scale Biosphere-Atmosphere Experiment in Amazonia (LBA). Remote Sens. Environ. 2003, 88, 111–127. [Google Scholar] [CrossRef]
- Johansen, K.; Roelfsema, C.; Phinn, S. Special feature-high spatial resolution remote sensing for environmental monitoring and management. J. Spatial Sci. 2008, 52, 43–47. [Google Scholar] [CrossRef]
- Johansen, K.; Arroyo, L.A.; Armston, J.; Phinn, S.; Witte, C. Mapping riparian condition indicators in a sub-tropical savanna environment from discrete return LiDAR data using object-based image analysis. Ecol. Indic. 2010, 10, 796–807. [Google Scholar] [CrossRef]
- Johansen, K.; Phinn, S.; Witte, C. Mapping of riparian zone attributes using discrete return LiDAR, QuickBird and SPOT-5 imagery: Assessing accuracy and costs. Remote Sens. Environ. 2010, 114, 2679–2691. [Google Scholar] [CrossRef]
- Blaschke, T.; Strobl, J. What’s wrong with pixels? Some recent developments interfacing remote sensing and GIS. GIS–Zeitschrift für Geoinformationssysteme 2001, 14, 12–17. [Google Scholar]
- Burnett, C.; Blaschke, T. A multi-scale segmentation/object relationship modelling methodology for landscape analysis. Ecol. Model. 2003, 168, 233–249. [Google Scholar] [CrossRef]
- Blaschke, T.; Burnett, C.; Pekkarinen, A. New contextual approaches using image segmentation for object-based classification. In Remote Sensing Image Analysis: Including the Spatial Domain; De Meer, F., de Jong, S., Eds.; Kluver Academic Publishers: Dordrecht, the Netherlands, 2004; pp. 211–236. [Google Scholar]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Benz, U.C.; Hofmann, P.; Willhauck, G.; Lingenfelder, I.; Heynen, M. Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready information. ISPRS J. Photogramm. Remote Sens. 2004, 58, 239–258. [Google Scholar] [CrossRef]
- Liu, Y.; Li, M.; Mao, L.; Xu, F. Review of remotely sensed imagery classification patterns based on object oriented image analysis. Chinese Geogr. Sci. 2006, 16, 282–288. [Google Scholar] [CrossRef]
- Lang, S. Object-based image analysis for remote sensing applications: Modeling reality—dealing with complexity. In Object Based Image Analysis; Blaschke, T., Lang, S., Hay, G.J., Eds.; Springer: Heidelberg/Berlin, Germany, 2008; pp. 1–25. [Google Scholar]
- Blaschke, T.; Lang, S.; Hay, G.J. Object Based Image Analysis; Springer: Berlin, Germary, 2008; p. 817. [Google Scholar]
- Haralick, R.M.; Shapiro, L. Survey: Image segmentation techniques. Comput. Vis. Graph. Image Process. 1985, 29, 100–132. [Google Scholar] [CrossRef]
- Pal, R.; Pal, K. A review on image segmentation techniques. Pattern Recogn. 1993, 26, 1277–1294. [Google Scholar] [CrossRef]
- Hay, G.J.; Blaschke, T.; Marceau, D.J.; Bouchard, A. A comparison of three image-object methods for the multiscale analysis of landscape structure. ISPRS J. Photogramm. Remote Sens. 2003, 57, 327–345. [Google Scholar] [CrossRef]
- Zhan, Q.F.; Molenaar, M.; Tempfli, K.; Shi, W. Quality assessment for geo-spatial objects derived from remotely sensed data. Int. J. Remote Sens. 2005, 26, 2953–2974. [Google Scholar] [CrossRef]
- Hay, G.J.; Castilla, G. Geographic Object-Based Image Analysis (GEOBIA): A new name for a new discipline. In Object Based Image Analysis; Blaschke, T., Lang, S., Hay, G., Eds.; Springer: Berlin, Germary, 2008; pp. 93–112. [Google Scholar]
- Kettig, R.; Landgrebe, D. Classification of multispectral image data by extraction and classification of homogeneous objects. IEEE Trans. Geosci. Electron. 1976, GE-14, 19–26. [Google Scholar] [CrossRef]
- Neubert, M.; Herold, H.; Meinel, G. Assessing image segmentation quality–concepts, methods and application. In Object Based Image Analysis; Blaschke, T., Lang, S., Hay, G.J., Eds.; Springer: Berlin, Germary, 2008; pp. 760–784. [Google Scholar]
- Ke, Y.; Quackenbush, L.J.; Im, J. Synergistic use of QuickBird multispectral imagery and LIDAR data for object-based forest species classification. Remote Sens. Environ. 2010, 114, 1141–1154. [Google Scholar] [CrossRef]
- Hay, G.J.; Marceau, D.J.; Dube, P.; Bouchard, A. A multiscale framework for landscape analysis: Object-specific analysis and upscaling. Landscape Ecol. 2001, 16, 471–490. [Google Scholar] [CrossRef]
- Langanke, T.; Burnett, C.; Lang, S. Assessing the mire conservation status of a raised bog site in Salzburg using object-based monitoring and structural analysis. Landscape Urban Plan. 2007, 79, 160–169. [Google Scholar] [CrossRef]
- Laliberte, A.S.; Fredrickson, E.L.; Rango, A. Combining decision trees with hierarchical object-oriented image analysis for mapping arid rangelands. Photogramm. Eng. Remote Sensing 2007, 73, 197–207. [Google Scholar] [CrossRef]
- Stow, D.; Hamada, Y.; Coulter, L.; Anguelova, Z. Monitoring shrubland habitat changes through object-based change identification with airborne multispectral imagery. Remote Sens. Environ. 2008, 112, 1051–1061. [Google Scholar] [CrossRef]
- Tiede, D.; Lang, S.; Hoffmann, C. Domain-specific class modelling for one-level representation of single trees. In Object-Based Image Analysis; Blaschke, T., Lang, S., Hay, G., Eds.; Springer: Berlin, Germany, 2008; pp. 133–151. [Google Scholar]
- Gibbes, C.; Adhikari, S.; Rostant, L.; Southworth, J.; Qiu, Y. Application of object based classification and high resolution satellite imagery for savanna ecosystem analysis. Remote Sens. 2010, 2, 2748–2772. [Google Scholar] [CrossRef]
- Stow, D. Geographic object-based image change analysis. In Handbook of Applied Spatial Statistics; Fischer, M.M., Getis, A., Eds.; Springer: Berlin, Germany, 2010; Volume 4, pp. 565–582. [Google Scholar]
- Earth Tech. Geomorphic Overview of Waterways in the Werribee River Catchment; Melbourne Water: Melbourne, VIC, Australia, 2006. [Google Scholar]
- Department of Sustainability and Environment. Index of Stream Condition: The Second Benchmark of Victorian River Condition; Department of Sustainability and Environment, The State of Victoria: Melbourne, VIC, Australia, 2005.
- BoM. Climate Data Online; Bureau of Meteorology, Australian Government: Melbourne, VIC, Australia, 2008. Available online: http://www.bom.gov.au/climate/data/ (accessed on 5 May 2011).
- Anderson, E.S.; Thompson, J.A.; Austin, R.E. LIDAR density and linear interpolation effects on elevation estimates. Int. J. Remote Sens. 2005, 26, 3889–3900. [Google Scholar] [CrossRef]
- Hodgson, M.E.; Bresnahan, P. Accuracy of airborne lidar-derived elevation: Empirical assessment and error budget. Photogramm. Eng. Remote Sensing 2004, 70, 331–339. [Google Scholar] [CrossRef]
- Lovell, J.L.; Jupp, D.L.B.; Culvenor, D.S.; Coops, N.C. Using airborne and ground-based ranging lidar to measure canopy structure in Australian forests. Can. J. Remote Sens. 2003, 29, 607–622. [Google Scholar] [CrossRef]
- Armston, J.; Denham, R.; Danaher, T.; Scarth, P.; Moffiet, T. Prediction and validation of foliage projective cover from Landsat-5 TM and Landsat-7 ETM+ imagery for Queensland, Australia. J. Appl. Remote Sens. 2009, 3, 1–28. [Google Scholar] [CrossRef]
- eCognition. eCognition Developer 8.0.1 User Guide; Document Version 1.2.1; Definiens AG: Munich, Germany, 2010. [Google Scholar]
- Department of Sustainability and Environment. Index of Stream Conditions Users Manual, 3rd ed.Department of Sustainability and Environment, The State of Victoria: Melbourne, VIC, Australia, 2006.
- Tiede, D.; Hoffmann, C. Process Oriented Object-Based Algorithms for Single Tree Detection Using Laser Scanning Data. In Proceedings of the EARSeL-Workshop on 3D Remote Sensing in Forestry, Vienna, Austria, 14–15 February 2006; pp. 151–156.
© 2011 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Johansen, K.; Tiede, D.; Blaschke, T.; Arroyo, L.A.; Phinn, S. Automatic Geographic Object Based Mapping of Streambed and Riparian Zone Extent from LiDAR Data in a Temperate Rural Urban Environment, Australia. Remote Sens. 2011, 3, 1139-1156. https://doi.org/10.3390/rs3061139
Johansen K, Tiede D, Blaschke T, Arroyo LA, Phinn S. Automatic Geographic Object Based Mapping of Streambed and Riparian Zone Extent from LiDAR Data in a Temperate Rural Urban Environment, Australia. Remote Sensing. 2011; 3(6):1139-1156. https://doi.org/10.3390/rs3061139
Chicago/Turabian StyleJohansen, Kasper, Dirk Tiede, Thomas Blaschke, Lara A. Arroyo, and Stuart Phinn. 2011. "Automatic Geographic Object Based Mapping of Streambed and Riparian Zone Extent from LiDAR Data in a Temperate Rural Urban Environment, Australia" Remote Sensing 3, no. 6: 1139-1156. https://doi.org/10.3390/rs3061139
APA StyleJohansen, K., Tiede, D., Blaschke, T., Arroyo, L. A., & Phinn, S. (2011). Automatic Geographic Object Based Mapping of Streambed and Riparian Zone Extent from LiDAR Data in a Temperate Rural Urban Environment, Australia. Remote Sensing, 3(6), 1139-1156. https://doi.org/10.3390/rs3061139