Evaluation of Radiometric Performance for the Thermal Infrared Sensor Onboard Landsat 8

 ,
,
Abstract
:1. Introduction
2. Method and Data
2.1. Method
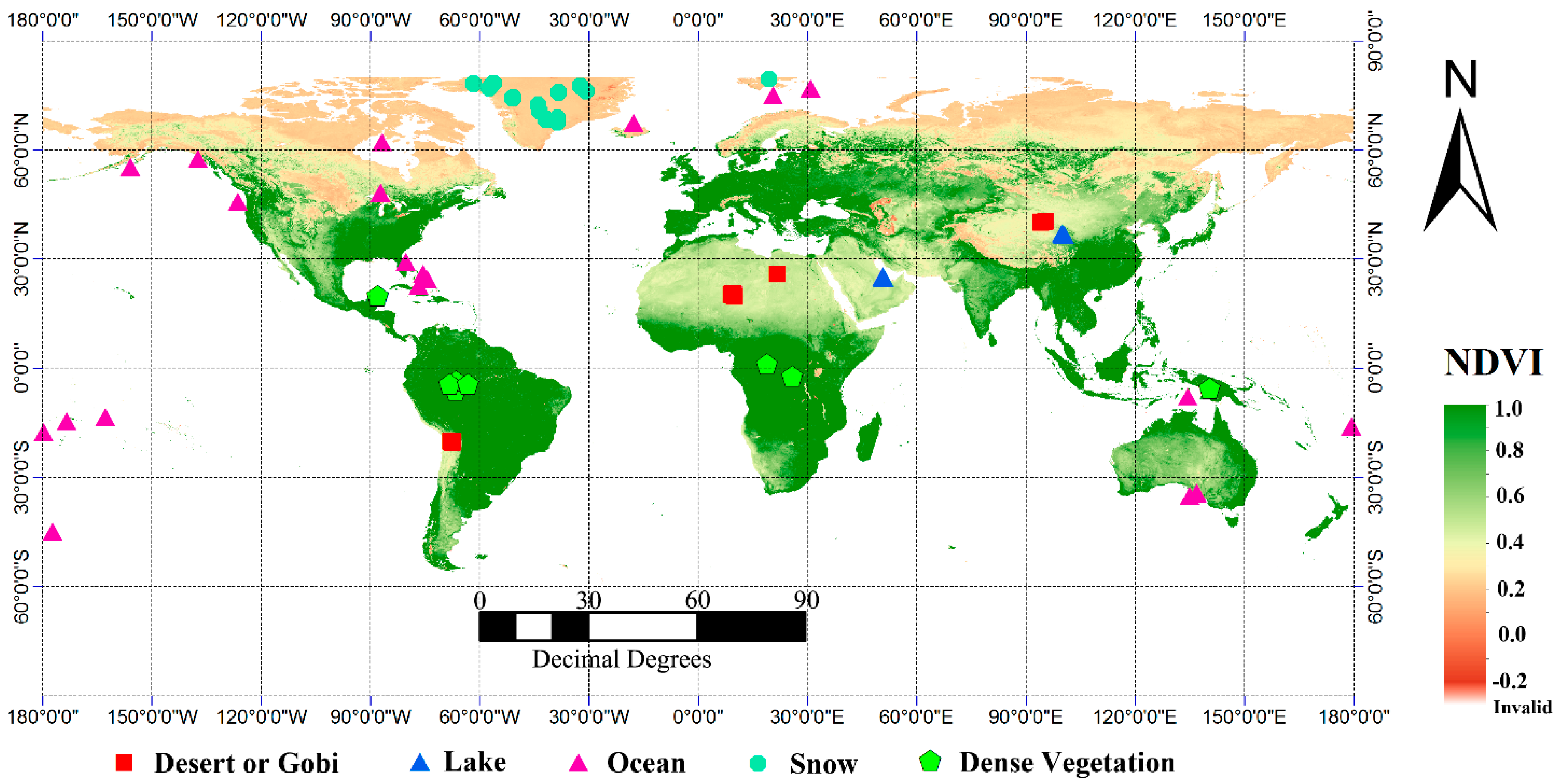
2.2. Landsat 8 Image Data

3. Results and Analysis
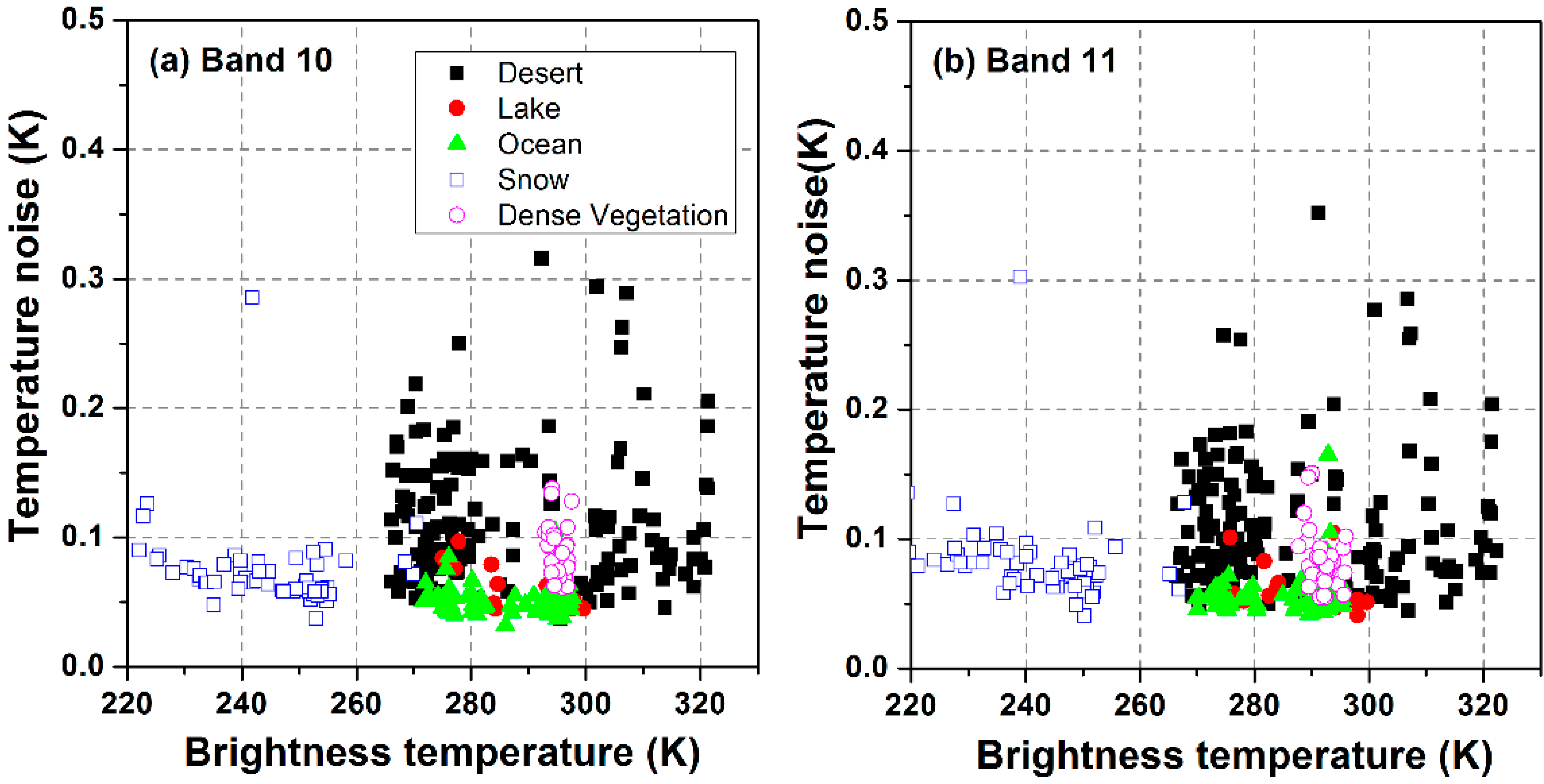
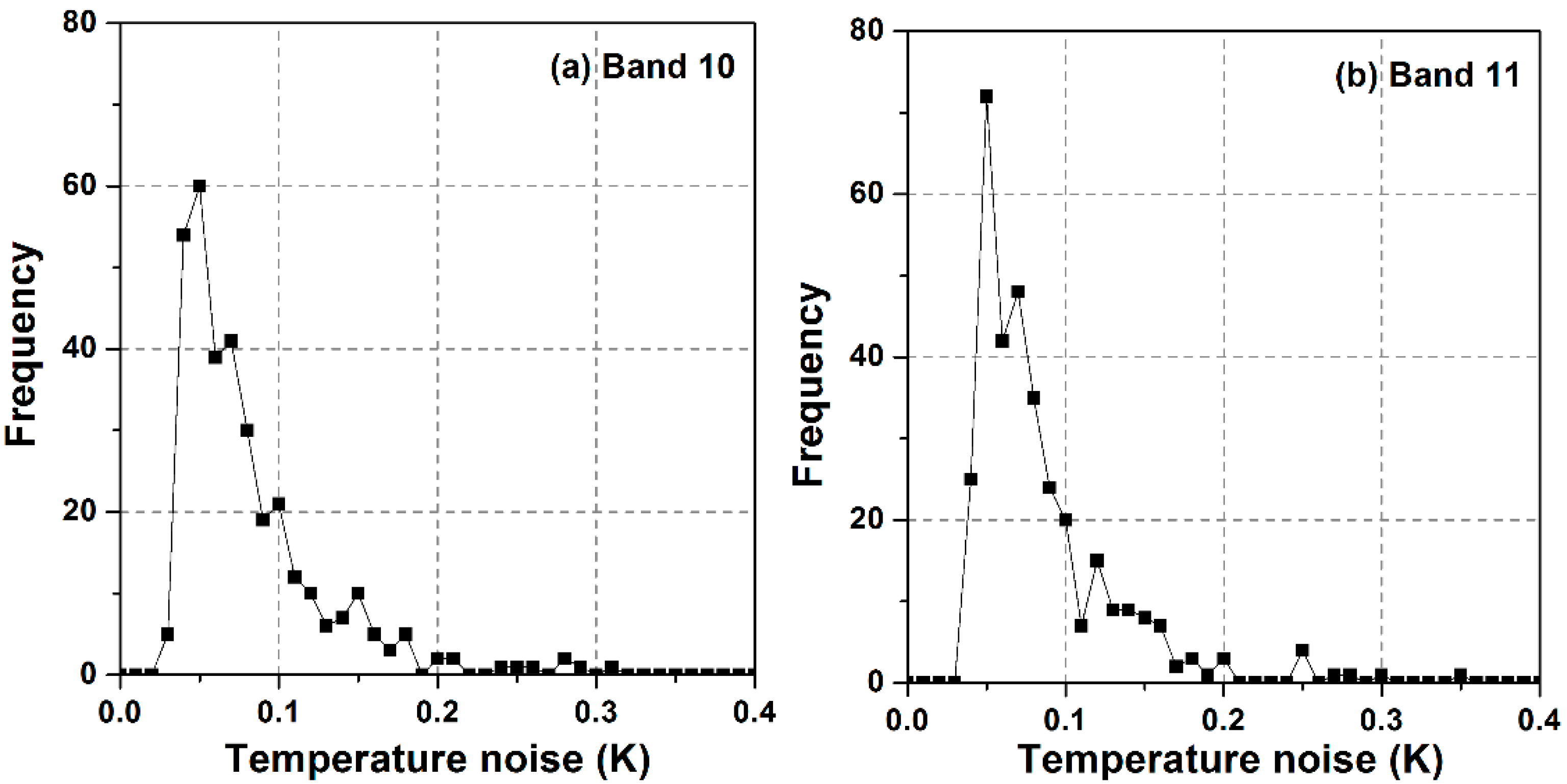
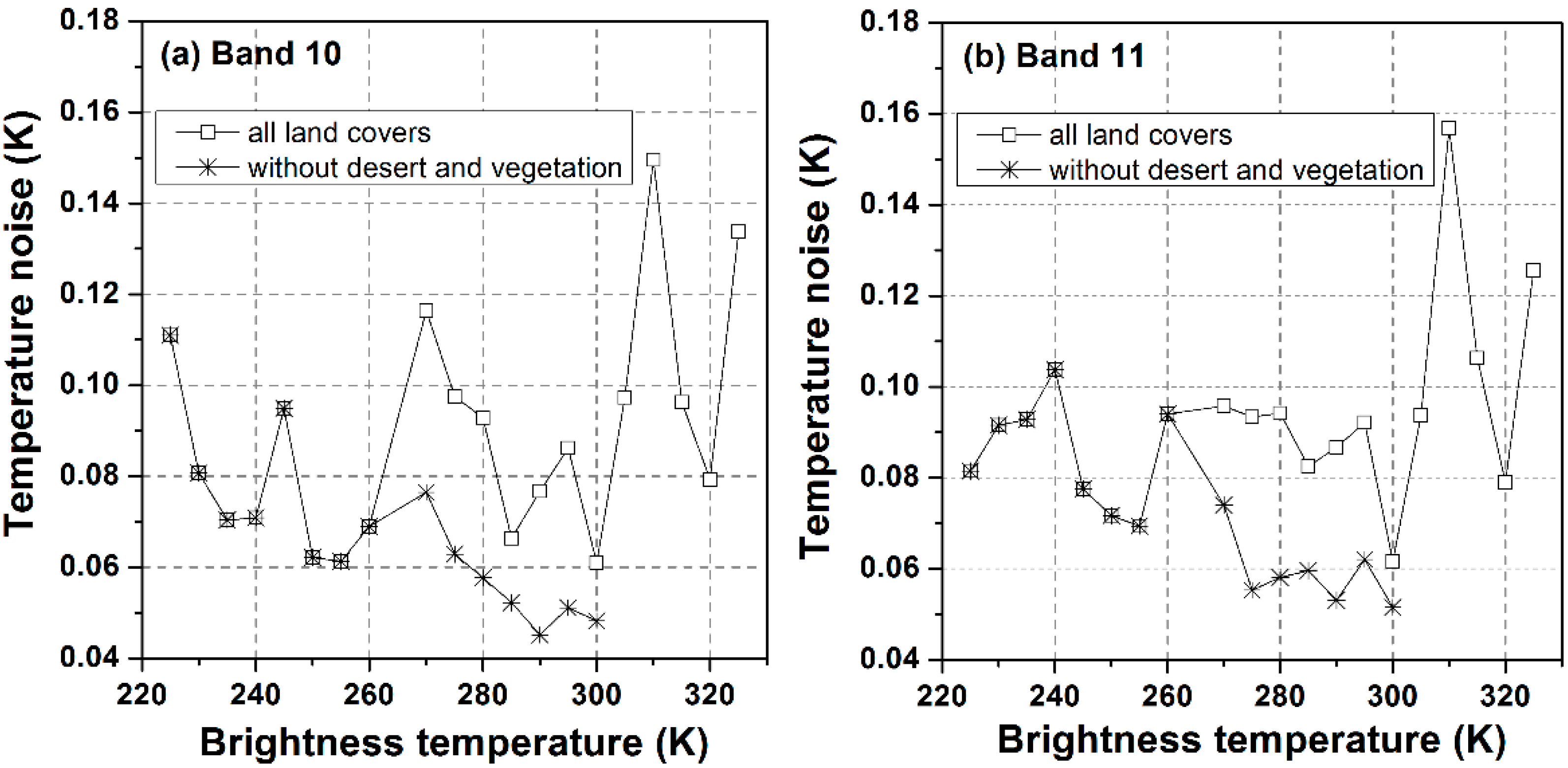
3.1. NEΔT of TIRS Images

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band 10 | |||||
|---|---|---|---|---|---|
| Land Covers | Min BT (K) | Max BT (K) | Avg. σ (K) | Min σ (K) | Max σ (K) |
| Lake | 275.0 | 299.6 | 0.059 | 0.045 | 0.097 |
| Ocean | 271.8 | 297.6 | 0.051 | 0.032 | 0.105 |
| Snow | 222.1 | 270.5 | 0.073 | 0.041 | 0.286 |
| Desert | 266.1 | 321.3 | 0.112 | 0.037 | 0.316 |
| Dense vegetation | 292.9 | 297.5 | 0.101 | 0.061 | 0.138 |
| Band 11 | |||||
| Lake | 275.8 | 299.6 | 0.062 | 0.041 | 0.105 |
| Ocean | 269.8 | 295.5 | 0.057 | 0.042 | 0.165 |
| Snow | 217.9 | 267.7 | 0.084 | 0.041 | 0.303 |
| Desert | 266.3 | 322.3 | 0.112 | 0.045 | 0.352 |
| Dense vegetation | 287.3 | 296.0 | 0.110 | 0.055 | 0.151 |



| Band No. | From All Land Covers | Without Desert and Vegetation | ||||
|---|---|---|---|---|---|---|
| 240 K | 280 K | 300 K | 240 K | 280 K | 300 K | |
| Band 10 | 0.075 | 0.089 | 0.086 | 0.075 | 0.055 | 0.051 |
| Band 11 | 0.083 | 0.091 | 0.092 | 0.083 | 0.056 | 0.060 |
3.2. Effect of NEΔT on LST Retrieval

4. Discussions
4.1. Time Variation of the Radiometric Response of the Instrument
4.2. Pixel-to-Pixel Radiometric Variation in the Linear Array System
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Irons, J.R.; Dwyer, J.L.; Barsi, J.A. The next Landsat satellite: The Landsat Data Continuity Mission. Remote Sens. Environ. 2012, 122, 11–21. [Google Scholar] [CrossRef]
- Roy, D.P.; Wulder, M.A.; Loveland, T.R.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Helder, D.; Irons, J.R.; Johnson, D.M.; Kennedy, R.; et al. Landsat-8: Science and product vision for terrestrial global change research. Remote Sens. Environ. 2014, 145, 154–172. [Google Scholar] [CrossRef]
- Lulla, K.; Nellis, M.D.; Rundquist, B. The Landsat 8 is ready for geospatial science and technology researchers and practitioners. Geocarto Int. 2013, 28, 191–191. [Google Scholar] [CrossRef]
- Qin, Z.; Karnieli, A.; Berliner, P. A mono-window algorithm for retrieving land surface temperature from Landsat TM data and its application to the Israel-Egypt border region. Int. J. Remote Sens. 2001, 22, 3719–3746. [Google Scholar] [CrossRef]
- Li, Z.-L.; Tang, B.-H.; Wu, H.; Ren, H.; Yan, G.; Wan, Z.; Trigo, I.F.; Sobrino, J.A. Satellite-derived land surface temperature: Current status and perspectives. Remote Sens. Environ. 2013, 131, 14–37. [Google Scholar] [CrossRef]
- Rozenstein, O.; Qin, Z.; Derimian, Y.; Karnieli, A. Derivation of land surface temperature for Landsat-8 TIRS using a split window algorithm. Sensors 2014, 14, 5768–5780. [Google Scholar] [CrossRef] [PubMed]
- Jiménez-Muñoz, J.C.; Sobrino, J.A.; Skokovic, D.; Mattar, C.; Cristóbal, J. Land surface temperature retrieval methods from Landsat-8 Thermal Infrared Sensor data. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1840–1843. [Google Scholar] [CrossRef]
- Ren, H.; Du, C.; Qin, Q.; Liu, R.; Meng, J.; Li, J. Atmospheric water vapor retrieval from Landsat 8 and its validation. In Proceedings of the 2014 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Quebec, QC, Canada, 13–18 July 2014; pp. 3045–3048.
- Wan, Z. Estimate of noise and systematic error in early thermal infrared data of the Moderate Resolution Imaging Spectroradiometer (MODIS). Remote Sens. Environ. 2002, 80, 47–54. [Google Scholar] [CrossRef]
- Xiong, X.; Barnes, W. An overview of MODIS radiometric calibration and characterization. Adv. Atmos. Sci. 2006, 23, 69–79. [Google Scholar] [CrossRef]
- Trishchenko, A.P.; Fedosejevs, G.; Li, Z.; Cihlar, J. Trends and uncertainties in thermal calibration of AVHRR radiometers onboard NOAA-9 to NOAA-16. J. Geophys. Res 2002. [Google Scholar] [CrossRef]
- Wan, Z.; Zhang, Y.; Li, Z.-L.; Wang, R.; Salomonson, V.V.; Yves, A.; Bosseno, R.; Hanocq, J.F. Preliminary estimate of calibration of the moderate resolution imaging spectroradiometer thermal infrared data using Lake Titicaca. Remote Sens. Environ. 2002, 80, 497–515. [Google Scholar] [CrossRef]
- Zhang, Y.; Zheng, Z.; Hu, X.; Rong, Z.; Zhang, L. Lake Qinghai: Chinese site for radiometric calibration of satellite infrared remote sensors. Remote Sen. Lett. 2012, 4, 315–324. [Google Scholar] [CrossRef]
- USGS Global Visualization Viewer. Available online: http://glovis.usgs.gov (accessed on 15 December 2014).
- Hu, X.; Liu, J.; Sun, L.; Rong, Z.; Li, Y.; Zhang, Y.; Zheng, Z.; Wu, R.; Zhang, L.; Gu, X. Characterization of CRCS Dunhuang test site and vicarious calibration utilization for Fengyun (FY) series sensors. Can. J. Remote Sens. 2010, 36, 566–582. [Google Scholar] [CrossRef]
- Remote Sensing Technologies:Test Site Catalog. Available online: http://calval.cr.usgs.gov/rst-resources/sites_catalog/radiometric-sites/test-site-gallery (accessed on 8 January 2013).
- Gao, B.-C. NDWI-A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Salomonson, V.; Appel, E. Development of the Aqua MODIS NDSI fractional snow cover algorithm and validation results. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1747–1756. [Google Scholar] [CrossRef]
- Zha, Y.; Gao, J.; Ni, S. Use of normalized difference built-up index in automatically mapping urban areas from TM imagery. Int. J. Remote Sens. 2003, 24, 583–594. [Google Scholar] [CrossRef]
- Using the USGS Landsat 8 Product. Available online: http://landsat.usgs.gov/Landsat8_Using_Product.php (accessed on 17 May 2013).
- Cao, C.; Luccia, F.J.D.; Xiong, X.; Wolfe, R.; Weng, F. Early on-orbit performance of the Visible Infrared Imaging Radiometer Suite onboard the Suomi National Polar-Orbiting Partnership (S-NPP) satellite. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1142–1156. [Google Scholar] [CrossRef]
- Chander, G.; Markhamb, B.L.; Helder, D.L. Summary of current radiometric calibration coefficients for Landsat MSS, TM, ETM+, and EO-1 ALI sensors. Remote Sens. Environ. 2009, 113, 893–903. [Google Scholar] [CrossRef]
- Morfitt, R. Radiometric Performance of Landsat 8. Available online: https://calval.cr.usgs.gov/wordpress/wp-content/uploads/14.007_JACIE_Morfitt_L8_Radiometric_performance.pdf (accessed on 27 March 2014).
- Du, C.; Ren, H.; Qin, Q.; Meng, J.; Li, J. Split-window algorithm for estimating land surface temperature from Landsat 8 TIRS data. In Proceedings of the 2014 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Quebec, QC, Canada, 13–18 July 2014; pp. 3578–3581.
- Montanaro, M.; Gerace, A.; Lunsford, A.; Reuter, D. Stray light artifacts in imagery from the Landsat 8 Thermal Infrared Sensor. Remote Sens. 2014, 6, 10435–10456. [Google Scholar] [CrossRef]
- Chander, G.; Markham, B. Revised Landsat-5 TM radiometric calibration procedures and postcalibration dynamic ranges. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2674–2673. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, H.; Du, C.; Liu, R.; Qin, Q.; Meng, J.; Li, Z.-L.; Yan, G. Evaluation of Radiometric Performance for the Thermal Infrared Sensor Onboard Landsat 8. Remote Sens. 2014, 6, 12776-12788. https://doi.org/10.3390/rs61212776
Ren H, Du C, Liu R, Qin Q, Meng J, Li Z-L, Yan G. Evaluation of Radiometric Performance for the Thermal Infrared Sensor Onboard Landsat 8. Remote Sensing. 2014; 6(12):12776-12788. https://doi.org/10.3390/rs61212776
Chicago/Turabian StyleRen, Huazhong, Chen Du, Rongyuan Liu, Qiming Qin, Jinjie Meng, Zhao-Liang Li, and Guangjian Yan. 2014. "Evaluation of Radiometric Performance for the Thermal Infrared Sensor Onboard Landsat 8" Remote Sensing 6, no. 12: 12776-12788. https://doi.org/10.3390/rs61212776