Comparing Two Photo-Reconstruction Methods to Produce High Density Point Clouds and DEMs in the Corral del Veleta Rock Glacier (Sierra Nevada, Spain)

Abstract
:1. Introduction
- (1)
- to produce dense point clouds and high resolution Digital Elevation Models (DEMs) for the Corral del Veleta rock glacier (Sierra Nevada, Spain) by means of two free 3D-PR procedures (a self-implemented stereo feature-based semi-automatic method and a fully automatic method based on the software 123D Catch that uses SfM and MVS algorithms);
- (2)
- to compare and analyze the quality of the point clouds and the DEMs obtained by means of the two 3D-PR methods as compared with a point cloud and a DEM obtained by means of a Terrestrial Laser Scanner (TLS); and
- (3)
- to evaluate the usefulness of these methods to register changes in the glacier dynamic.
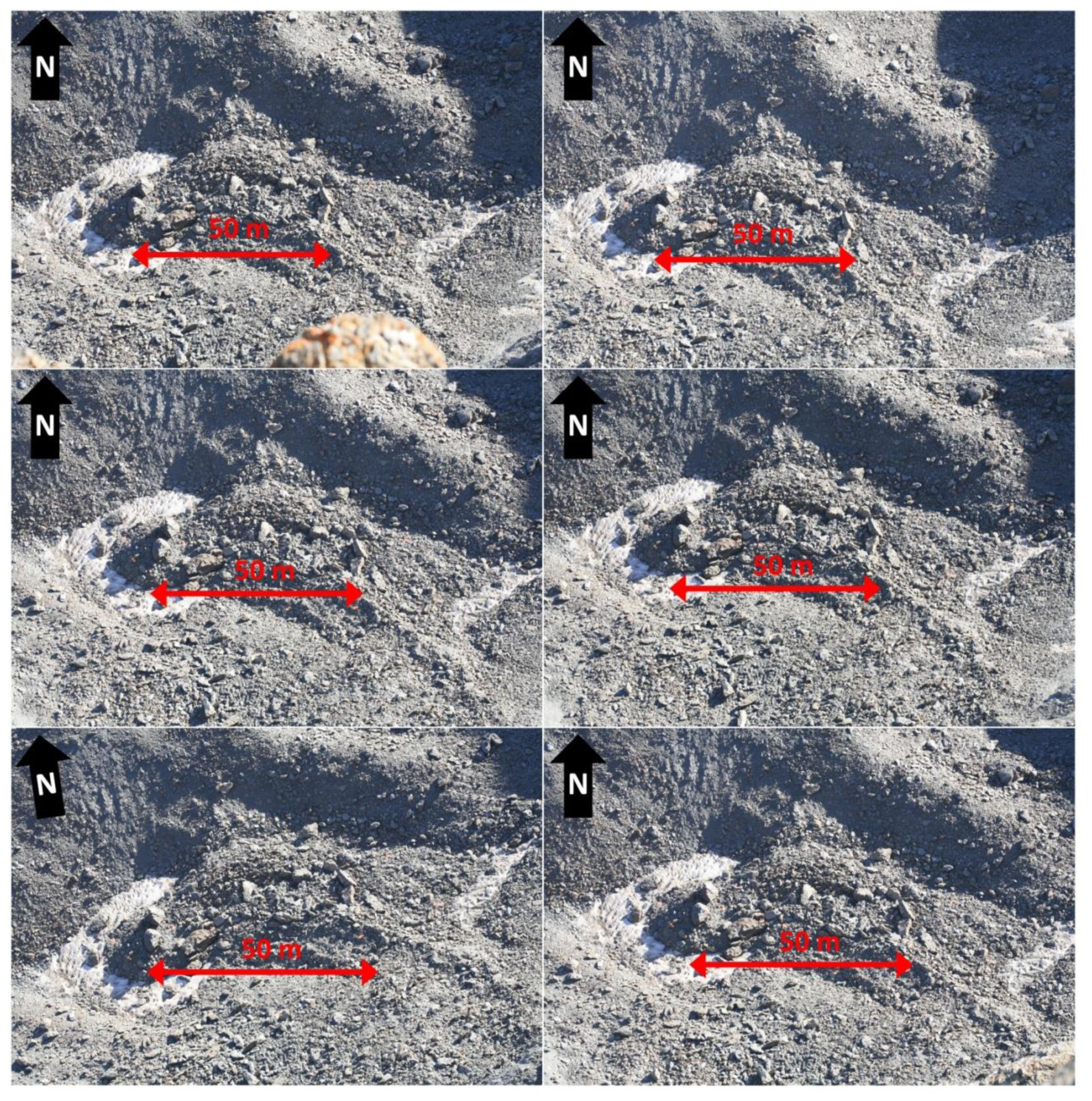
2. Study Area
3. Methodology
3.1. Stereo-Based SIFT Method
3.2. Fully Automatic 3D-PR Software: 123D Catch
3.3. Elaboration of DEMs
- (1)
- a dense network of points is needed to represent faithfully the dynamic of the whole glacier and
- (2)
- points are defined by fixed rods that can be lost with time in this changeable environment.
4. Results and Discussion
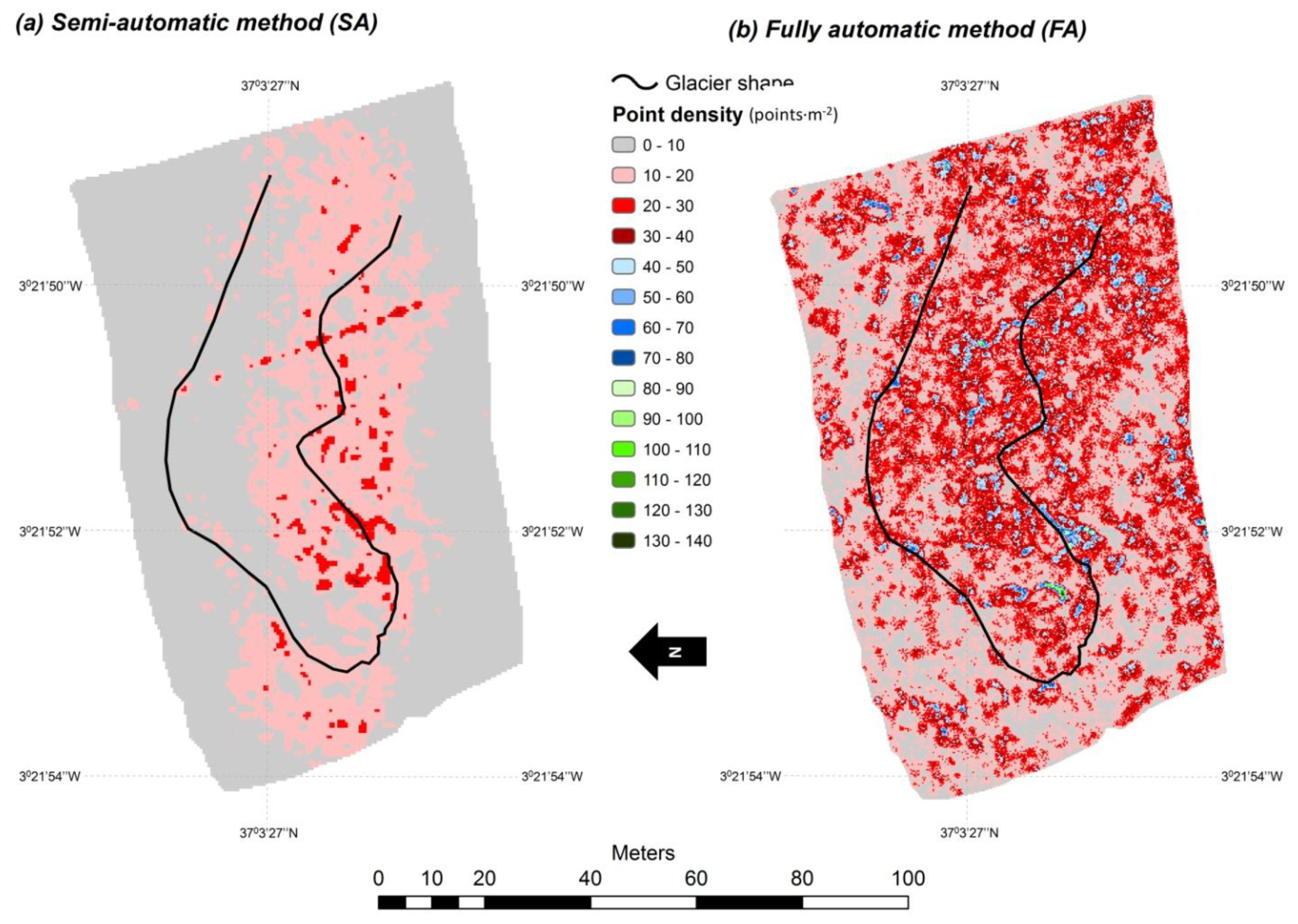
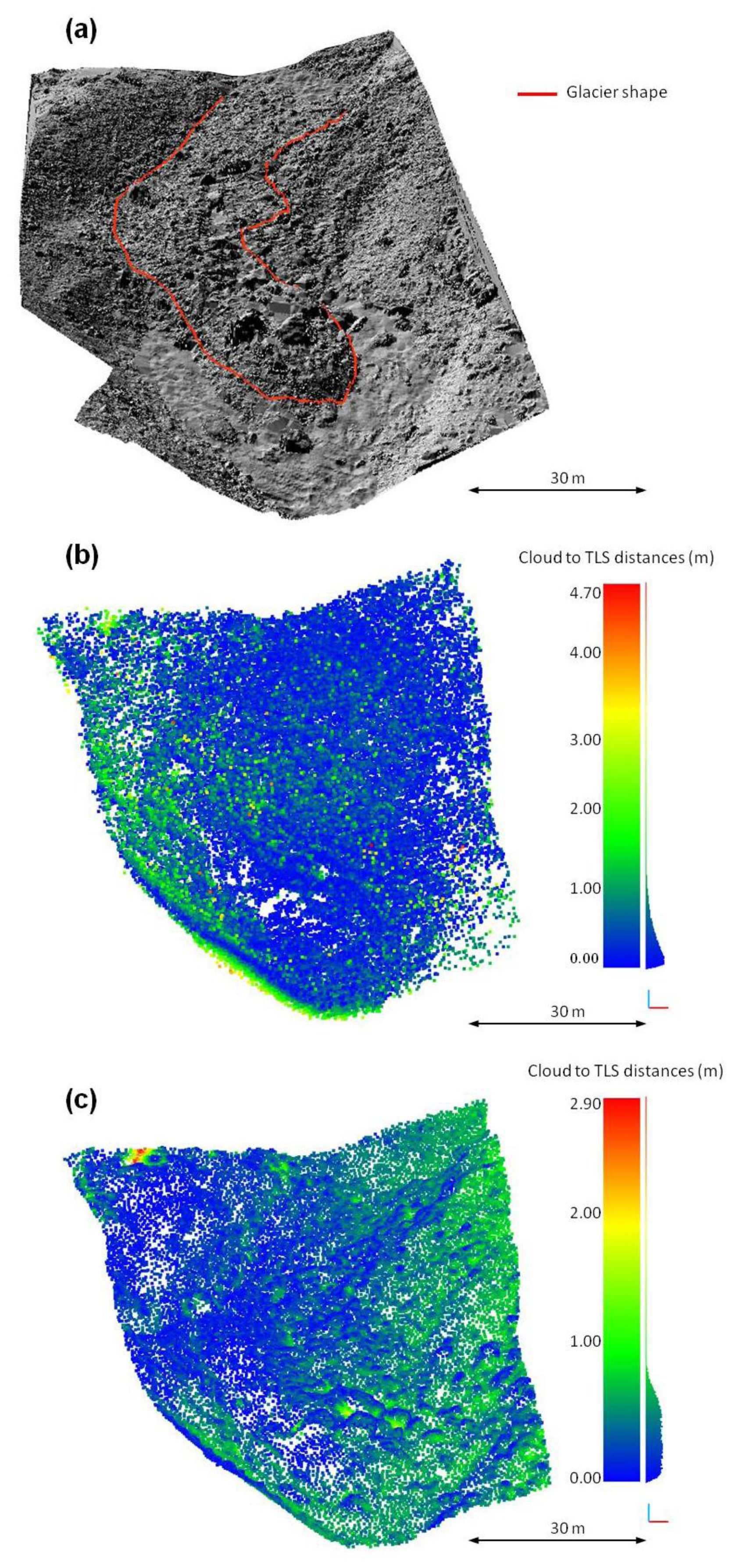
4.1. Point Cloud Characteristics: Accuracy and Density
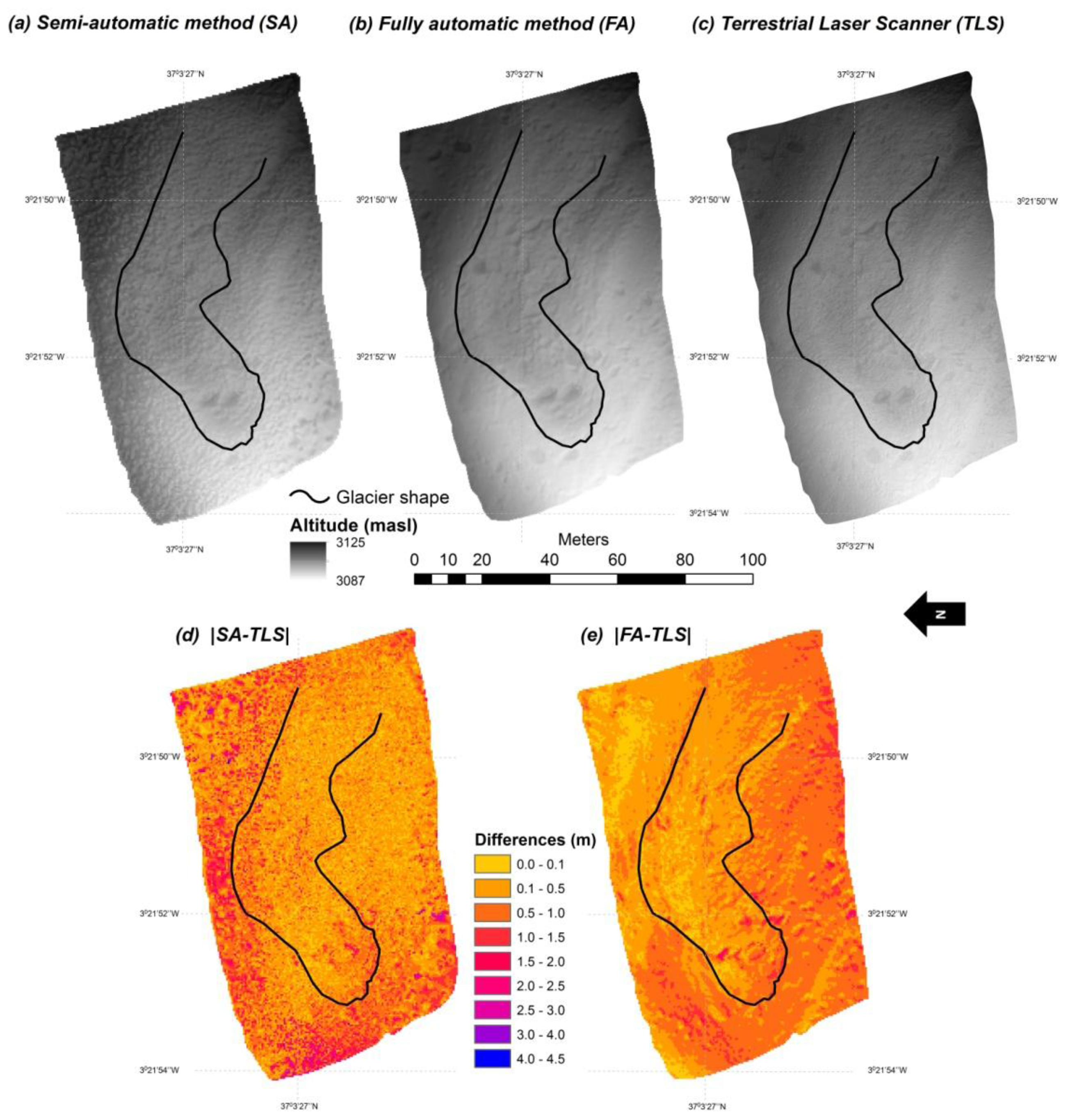
4.2. Digital Elevation Models
4.3. Comparison of Techniques
- -
- They require little expertise because the processing is almost automatic [41], mainly in the case of FA method.
- -
- -
- Both techniques are cheaper and less time-consuming as compared to other methods/techniques. In the case of the FA procedure, we would like to highlight that the processing is run in the cloud, therefore the company (Autodesk) will have access to your images. The processing time is reduced but your images need to be uploaded to the company’s servers.
5. Conclusions
Acknowledgments
- Author ContributionsÁlvaro Gómez-Gutiérrez implemented the research design, performed data analysis and executed the manuscript writing. José Juan de San José-Blasco carried out field work and provided geodesic support in order to georeference the models. Javier de Matías developed the SA method and carried out field work and data processing and analysis. Fernando Berenguer-Sempere carried out field work and TLS data processing and analysis.
Conflicts of Interest
References
- Kaufmann, V. The evolution of rock glacier monitoring using terrestrial photogrammetry: The example of äusseres hochebenkar rock glacier (Austria). Austrian J. Earth Sci 2012, 105, 63–77. [Google Scholar]
- Wahrhaftig, C. Foreword. In Rock Glaciers; Giardino, J.R., Shroder, J.F., Vitek, J.D., Eds.; Allen & Unwin: Boston, MA, USA, 1987; pp. VII–XII. [Google Scholar]
- De SanJosé, J.J.; Atkinson, A.D.J.; Salvador, F.; Gómez, A. Application of geomatic techniques to monitoring of the dynamics and to mapping of the veleta rock glacier (Sierra Nevada, Spain). Z. Geomorphol 2007, 51, 79–89. [Google Scholar]
- Aoyama, Y.; Doi, K.; Shibuya, K.; Ohta, H.; Tsuwa, I. Near real-time monitoring of flow velocity and direction in the floating ice tongue of the shirase glacier using low-cost GPS buoys. Earth Planets Space 2013, 65, 103–108. [Google Scholar]
- Baltsavias, E.P.; Favey, E.; Bauder, A.; Bosch, H.; Pateraki, M. Digital surface modelling by airborne laser scanning and digital photogrammetry for glacier monitoring. Photogramm. Rec 2001, 17, 243–273. [Google Scholar]
- Kerr, T.; Owens, I.; Rack, W.; Gardner, R. Using ground-based laser scanning to monitor surface change on the rolleston glacier, New Zealand. J. Hydrol. N. Z 2009, 48, 59–72. [Google Scholar]
- Kääb, A.; Haeberli, W.; Gudmundsson, G.H. Analysing the creep of mountain permafrost using high precision aerial photogrammetry: 25 years of monitoring Gruben rock glacier, Swiss Alps. Permafr. Periglac. Process 1997, 8, 409–426. [Google Scholar]
- Paul, F.; Kääb, A.; Haeberli, W. Recent glacier changes in the Alps observed by satellite: Consequences for future monitoring strategies. Glob. Planet. Chang 2007, 56, 111–122. [Google Scholar]
- De Matías, J.; de Sanjosé, J.; López-Nicolás, G.; Sagüés, C.; Guerrero, J. Photogrammetric methodology for the production of geomorphologic maps: Application to the Veleta rock glacier (Sierra Nevada, Granada, Spain). Remote Sens 2009, 1, 829–841. [Google Scholar]
- Pellikka, P.; Rees, W.G. Remote Sensing of Glaciers. Techniques for Topographic, Spatial and Thematic Mapping of Glaciers; Taylor & Francis Group: London, UK, 2010. [Google Scholar]
- Mayer, C.; Lambrecht, A.; Belò, M.; Smiraglia, C.; Diolaiuti, G. Glaciological characteristics of the ablation zone of Baltoro Glacier, Karakoram, Pakistan. Ann. Glaciol 2006, 43, 123–131. [Google Scholar]
- Mihalcea, C.; Mayer, C.; Diolaiuti, G.; D’Agata, C.; Smiraglia, C.; Lambrecht, A.; Vuillermoz, E.; Tartari, G. Spatial distribution of debris thickness and melting from remote-sensing and meteorological data, at debris-covered Baltoro Glacier, Karakoram, Pakistan. Ann. Glaciol 2008, 48, 49–57. [Google Scholar]
- Kääb, A.; Isaksen, K.; Trond, E.; Farbrot, H. Geometry and dynamics of two lobe-shaped rock glaciers in the permafrost of Svalbard. Nor. J. Geogr 2002, 56, 152–160. [Google Scholar]
- Kaufmann, V.; Ladstädter, R. Monitoring of Active Rock Glaciers by Means of Digital Photogrammetry. Proceedings of 2002 ISPRS Commission III Symposium of Photogrammetric Computer Vision, Graz, Austria, 9–13 September 2002.
- Kaufmann, V.; Ladstädter, R. Quantitative Analysis of Rock Glacier Creep by Means of Digital Photogrammetry Using Multi-Temporal Aerial Photographs: Two Case Studies in the Austrian Alps. Proceedings of the 2003 International Conference on Permafrost, Zurich, Switzerland, 20–25 July 2003; pp. 525–530.
- Kaufmann, V.; Ladstädter, R. Spatio-Temporal Analysis of the Dynamic Behaviour of the Hochebenkar Rock Glaciers (Oetztal Alps, Autria) by Means of Digital Photogrammetric Methods. Proceedings of the 2000 International Symposium on High Mountain Remote Sensing Cartography, Addis Ababa, Ethiopia, 3–9 September 2000.
- Whitehead, K.; Moorman, B.J.; Hugenholtz, C.H. Brief communication: Low-cost, on-demand aerial photogrammetry for glaciological measurement. Cryosphere 2013, 7, 1879–1884. [Google Scholar]
- Friedli, E. Photogrammetric Methods for the Reconstruction and Monitoring of Glaciers. Master’s Thesis, ETH Zürich, Zürich, Switzerland, 2013. [Google Scholar]
- Kaufmann, V.; Ladstädter, R. Application of Terrestrial Photogrammetry for Glacier Monitoring in Apline Environments. Proceedings of the 2008 Congress of ISPRS, Beijing, China, 3–11 July 2008; International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences: Beijing, China; pp. 813–818.
- Brecher, H.H.; Thompson, L.G. Measurement of the retreat of qori kalis glacier in the tropical andes of peru by terrestrial photogrammetry. Photogramm. Eng. Remote Sens 1993, 59, 1017–1022. [Google Scholar]
- Palà, V.; Calvet, J.; García Sellés, D.; Ximenis, L. Fotogrametría terrestre en el glaciar johnsons, isla livingston, Antártida. Acta Geol. Hisp 1999, 34, 427–445. [Google Scholar]
- Bauer, A.; Paar, G.; Kaufmann, V. Terrestrial Laser Scanning for Rock Glacier Monitoring. Proceedings of the 2003 Eighth International Conference on Permafrost, Zurich, Switzerland, 21–25 July 2003; pp. 55–60.
- De Sanjosé, J.J.; Berenguer, F.; Atkinson, A.D.J.; de Matías, J.; Serrano, E.; Gómez-Ortiz, A.; González-García, M.; Rico, I. Geomatics techniques applied to glaciers, rock glaciers, and ice patches in Spain 1991–2012. Geogr. Ann.: Ser. A Phys. Geogr 2014. [Google Scholar] [CrossRef]
- Serrano, E.; San José, J.J.; Agudo, C. Rock glacier dynamics in a marginal periglacial high mountain environment: Flow, movement 1991–2000 and structure of the Argualas rock glacier, the Pyrenees. Geomorphology 2006, 74, 285–296. [Google Scholar]
- Krainer, K.; He, X. Flow velocities of active rock glaciers in the austrian alps. Geogr. Ann.: Ser. A Phys. Geogr 2006, 88, 267–280. [Google Scholar]
- Serrano, E.; de Sanjosé, J.J.; González-Trueba, J.J. Rock glacier dynamics in marginal periglacial environments. Earth Surf. Process. Landf 2010, 35, 1302–1314. [Google Scholar]
- Lambiel, C.; Delaloye, R. Contribution of real-time Kinematic GPS in the study of creeping mountain permafrost: Examples from the western Swiss Alps. Permafr. Periglac. Process 2004, 15, 229–241. [Google Scholar]
- Eiken, T.; Hagen, J.O.; Melvold, K. Kinematic GPS survey of geometry changes on Svalbard glaciers. Ann. Glaciol 1997, 24, 157–163. [Google Scholar]
- Kenner, R.; Phillips, M.; Danioth, C.; Denier, C.; Thee, P.; Zgraggen, A. Investigation of rock and ice loss in a recently deglaciated mountain rock wall using terrestrial laser scanning: Gemsstock, Swiss Alps. Cold Reg. Sci. Technol 2011, 67, 157–164. [Google Scholar]
- Carturan, L.; Baldassi, G.A.; Bondesan, A.; Calligaro, S.; Carton, A.; Cazorzi, F.; Dalla Fontana, G.; Francese, R.; Guarnieri, A.; Milan, N.; et al. Current behaviour and dynamics of the lowermost Italian glacier (montasio occidentale, Julian Alps). Geogr. Ann. Ser. A Phys. Geogr 2013, 95, 79–96. [Google Scholar]
- Avian, M.; Kellerer-Pirklbauer, A.; Bauer, A. Lidar for monitoring mass movements in permafrost environments at the cirque Hinteres Langtal, Austria, between 2000 and 2008. Nat. Hazards Earth Syst. Sci 2009, 9, 1087–1094. [Google Scholar]
- Abermann, J.; Fischer, A.; Lambrecht, A.; Geist, T. On the potential of very high-resolution repeat dems in glacial and periglacial environments. Cryosphere 2010, 4, 53–65. [Google Scholar]
- Fischer, L.; Eisenbeiss, H.; Kääb, A.; Huggel, C.; Haeberli, W. Monitoring topographic changes in a periglacial high-mountain face using high-resolution DTMS, Monte Rosa east face, Italian Alps. Permafr. Periglac. Process 2011, 22, 140–152. [Google Scholar]
- Karimi, N.; Farokhnia, A.; Shishangosht, S.; Elmi, M.; Eftekhari, M.; Ghalkhani, H. Elevation changes of Alamkouh Glacier in iran since 1955, based on remote sensing data. Int. J. Appl. Earth Obs. Geoinf 2012, 19, 45–58. [Google Scholar]
- Janke, J.R. Using airborne lidar and USGS DEM data for assessing rock glaciers and glaciers. Geomorphology 2013, 195, 118–130. [Google Scholar]
- Ullman, S. The interpretation of structure from motion. Proc. R. Soc. B 1979, 203, 405–426. [Google Scholar]
- Seitz, S.M.; Curless, B.; Diebel, J.; Scharstein, D.; Szeliski, R. A. Comparison and Evaluation of Multi-View Stereo Reconstruction Algorithms. Procedings of the 2006 IEEE Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 17–22 June 2006.
- Furukawa, Y.; Ponce, J. Accurate, dense, and robust multiview stereopsis. IEEE Trans. Pattern Anal. Mach. Intell 2010, 32, 1362–1376. [Google Scholar]
- Harwin, S.; Lucieer, A. Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from unmanned aerial vehicle (UAV) imagery. Remote Sens 2012, 4, 1573–1599. [Google Scholar]
- Snavely, N.; Seitz, S.M.; Szeliski, R. Photo tourism: Exploring photo collections in 3D. ACM Trans. Graph 2006, 25, 835–846. [Google Scholar]
- James, M.R.; Robson, S. Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. J. Geophys. Res 2012, 117, 1–17. [Google Scholar]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic structure from motion: A new development in photogrammetric measurement. Earth Surf. Process. Landf 2013, 38, 421–430. [Google Scholar]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar]
- Gómez, Gutiérrez Á.; Schnabel, S.; Berenguer-Sempere, F.; Lavado-Contador, J.F.; Rubio-Delgado, J. Using 3D photo-reconstruction methods to estimate gully headcut erosion. Catena 2014, 120, 91–101. [Google Scholar]
- Gómez, A.; Palacios, D.; Ramos, M.; Tanarro, L.M.; Schulte, L.; Salvador, F. Location of permafrost in marginal regions: Corral del veleta, Sierra Nevada, Spain. Permafr. Periglac. Process 2001, 12, 93–110. [Google Scholar]
- Grunewald, K.; Scheithauer, J. Europe’s southernmost glaciers: Response and adaptation to climate change. J. Glaciol 2010, 56, 129–142. [Google Scholar]
- Gómez-Ortiz, A.; Schulte, L.; Salvador, F.; Palacios, D.; San José, J.J.; Atkinson, A.D.J. Deglaciación reciente de sierra nevada. Repercusiones morfogenéticas, nuevos datos y perspectivas de estudio futuro. Cuad. Investig. Geogr 2004, 30, 147–168. [Google Scholar]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis 2004, 60, 91–110. [Google Scholar]
- Leica Cyclone. Available online: hds.leica-geosystems.com/en/Leica-Cyclone_6515.htm (accessed on 3 February 2014).
- CloudCompare. Available online: www.danielgm.net/cc/ (accessed on 19 September 2013).
- Girardeau-Montaut, D.; Roux, R.M.; Thibault, G. Change Detection on Points Cloud Data Acquired with a Ground Laser Scanner. Proceedings of the 2005 ISPRS Workshop Laser Scanning, Enschede, The Netherlands, 12–14 September 2005.
- Autodesk 123D Catch. Available online: www.123dapp.com/catch (accessed on 19 September 2013).
- Arc 3D Webservice. Available online: homes.esat.kuleuven.be/~visit3d/webservice/v2/index.php (accessed on 3 February 2014).
- Bundler and PMVS2. Available online: phototour.cs.washington.edu/bundler/ (accessed on 19 September 2013).
- CMP SfM Web Service. Available online: ptak.felk.cvut.cz/sfmservice/websfm.pl?menu=webservice. (accessed on 3 February 2014).
- Microsoft Photosynth. Available online: photosynth.net/ (accessed on 19 September 2013).
- VisualSFM. Available online: ccwu.me/vsfm/ (accessed on 19 September 2013).
- Chandler, J.; Fryer, J. Autodesk 123d catch: How accurate is it? Geomat. World 2013, 32–33. [Google Scholar]
- Snavely, N.; Seitz, S.M.; Szeliski, R. Modeling the world from internet photo collections. Int. J. Comput. Vis 2008, 80, 189–210. [Google Scholar]
- Aiger, D.; Mitra, N.J.; Cohen-Or, D. 4 points congruent sets for robust surface registration. ACM Trans. Graph 2008, 27, 1–10. [Google Scholar]
- Besl, P.J.; McKay, N.D. A method of registration of 3-D shapes. IEEE Trans. PAMI 1992, 14, 239–256. [Google Scholar]
- ESRI. Available online: www.esri.com (accessed on 19 September 2013).
- Sun or Moon Altitude/Azimuth Table. Available online: aa.usno.navy.mil/data/docs/AltAz.php (accessed on 25 April 2014).
- Castillo, C.; Pérez, R.; James, M.R.; Quinton, N.J.; Taguas, E.V.; Gómez, A. Comparing the accuracy of several field methods for measuring gully erosion. Soil Sci. Soc. Am. J 2012, 76, 1319–1332. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Value-Description |
|---|---|
| Average altitude of the detritic body (masl) | 3106 |
| Aspect | West oriented |
| Length (m) | 129.6 m |
| Average width (m) | 37.5 |
| Average thickness (m) | 8.0 |
| Surface area (m2) | 3815 |
| Clastic material | Heterometric blocks of feldspathic micaschist (from several m3 to cm3) with coarse matrix and internal fine matrix |
| Software | Reference |
|---|---|
| 123D Catch | [52] |
| ARC3D | [53] |
| Bundler and PMVS2 | [54] |
| CMP SfM | [55] |
| Photosynth | [56] |
| VisualSFM | [57] |
| SA-3D-PR | FA-3D-PR | TLS | |
|---|---|---|---|
| Photos for 3D-PR or stations for TLS (n) | 6 | 6 | 4 |
| Number of points (n) | 65820 | 167439 | 4996469 |
| Average point spacing (m) | 0.41 | 0.26 | 0.05 |
| Average point density (pts·m−2) | 8.09 | 20.58 | 614.19 |
| Average distance to TLS cloud (m) | 0.28 | 0.21 | - |
| Standard deviation of distances (m) | 0.52 | 0.43 | - |
| Maximum Distance to TLS cloud (m) | 4.57 | 2.81 | - |
| Relative precision ratio | 1:1071 | 1:1429 | - |
| SA-3D-PR | FA-3D-PR | TLS | |
|---|---|---|---|
| Average Z (m) | 3105.8 | 3105.4 | 3105.9 |
| Maximum (m) | 3124.3 | 3123.9 | 3124.9 |
| Minimum (m) | 3086.9 | 3088.4 | 3088.9 |
| Average abs. difference with TLS DEM (m) | 0.52 | 0.51 | - |
| R correlation with TLS | 0.9929 | 0.9981 | 1.0000 |
| Hillshade Value | Number of Pixels | Absolute Difference TLS-FA (m) |
|---|---|---|
| 0 | 14,528 | 0.52 |
| 1–50 | 2896 | 0.54 |
| 51–100 | 5235 | 0.52 |
| 101–150 | 4556 | 0.49 |
| 151–200 | 2907 | 0.47 |
| 201–253 | 1600 | 0.45 |
| 254 | 23 | 0.38 |
| SA-3D-PR | FA-3D-PR | TLS | |
|---|---|---|---|
| Capture time | +++ | +++ | + |
| Processing time | + | ++ | + |
| Cost (equipment) | +++ | +++ | + |
| Expertise requirements | + | ++ | + |
| Accuracy and quality | + | ++ | +++ |
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Gómez-Gutiérrez, Á.; De Sanjosé-Blasco, J.J.; De Matías-Bejarano, J.; Berenguer-Sempere, F. Comparing Two Photo-Reconstruction Methods to Produce High Density Point Clouds and DEMs in the Corral del Veleta Rock Glacier (Sierra Nevada, Spain). Remote Sens. 2014, 6, 5407-5427. https://doi.org/10.3390/rs6065407
Gómez-Gutiérrez Á, De Sanjosé-Blasco JJ, De Matías-Bejarano J, Berenguer-Sempere F. Comparing Two Photo-Reconstruction Methods to Produce High Density Point Clouds and DEMs in the Corral del Veleta Rock Glacier (Sierra Nevada, Spain). Remote Sensing. 2014; 6(6):5407-5427. https://doi.org/10.3390/rs6065407
Chicago/Turabian StyleGómez-Gutiérrez, Álvaro, José Juan De Sanjosé-Blasco, Javier De Matías-Bejarano, and Fernando Berenguer-Sempere. 2014. "Comparing Two Photo-Reconstruction Methods to Produce High Density Point Clouds and DEMs in the Corral del Veleta Rock Glacier (Sierra Nevada, Spain)" Remote Sensing 6, no. 6: 5407-5427. https://doi.org/10.3390/rs6065407