1. Introduction
In the field of polarimetric Synthetic Aperture Radar (PolSAR), model-based incoherent decomposition is an important research topic [
1]. Since Freeman and Durden proposed the three-component decomposition in 1992 [
2] and 1998 [
3], more than 20 decompositions have been published [
4–
16]. Model-based decomposition has been successfully used in PolSAR image classification [
17–
21], speckle filtering [
22], polarimetric SAR Interferometry [
23], wetland research [
24], soil moisture and roughness estimation [
25–
27], target detection [
28,
29], disaster assessment [
30], and so on. In the past several years, the largest advances include adaptive scattering models [
16,
26,
31,
32], Orientation Angle Compensation (OAC) [
33], Nonnegative Eigenvalue Constraint (NNEC) [
7],
etc.van Zyl
et al. [
7] demonstrated that if model-based decomposition is valid, then after subtracting any components from the observed covariance or coherency matrix, the remainder matrix must be positive semidefinite, or its eigenvalues must be nonnegative. This constraint is named as NNEC. It could be easily proved that, usually, the decomposition results satisfy NNEC as long as the obtained component powers are nonnegative. In [
8,
15], NNEC was adopted to eliminate negative power as much as possible. In recent years, several Nonnegative Eigenvalue Decompositions (NNED) were proposed by van Zyl
et al. [
7], Arii
et al. [
6], Cui
et al. [
12], and Wang
et al. [
13]. In all NNED, the maximum volume scattering power that makes the remainder matrix positive semidefinite is thought to be optimal and selected. In this way, the overestimation of volume scattering power in Yamaguchi decomposition or Freeman-Durden decomposition is largely eliminated. In addition, negative power is fundamentally avoided.
However, NNED still has two potential problems. The first problem is the overestimation of volume scattering power is not entirely eliminated. Since the maximum volume scattering power in theory is adopted, the overestimation is inevitable to a large degree. When applying adaptive volume scattering models, the overestimation is more serious [
6,
13].
The second problem is how to explain cross-polarized power. Subject to the Reflection Symmetry Assumption (RSA) and employment of elemental scatterers of which cross-polarized complex scattering coefficient, or
SHV is zero, the derived coherent models of surface scattering and double-bounce scattering cannot describe depolarizing effect. However, it was observed [
7] that if volume scattering power is computed with RSA, then, in many natural forest pixels, volume scattering and helix scattering cannot explain all cross-polarized power. van Zyl attributed these unexplained cross-polarized power to a remainder component which is thought to represent terrain effects and rough surface scattering. If volume scattering power is computed without RSA, then in almost every pixel, volume scattering and helix scattering cannot explain all cross-polarized power. Wang
et al. [
13] and Cui
et al. [
12] utilized elemental scatterers of which
SHV is non-zero and coherent models, to explain these remaining cross-polarized power. Unfortunately, among all widely recognized scattering mechanisms, only helix scattering with standard orientation has non-zero
SHV.
Some researchers may argue that there are possibly some unknown scattering mechanisms, which could produce cross-polarized power. However, according to the latest incoherent adaptive scattering models, such as X-Bragg model [
26], Arii’s model [
31], and Neumann’s model [
32], when the orientation angles of scatterers in one component are not exactly the same, this component will give cross-polarized power as long as
SHH +
SVV ≠ 0, where
SHH and
SVV are the complex scattering coefficients, HH means horizontal transmitting and horizontal receiving, VV means vertical transmitting and vertical receiving.
Generally, in incoherent scattering, the assumption that orientation angles in one component are the same cannot be guaranteed even for man-made targets, let alone for natural distributed targets. Natural terrain, like the ground in old-growth forest, is usually rough even when the wavelength is long. Hence, surface scattering could produce non-zero cross-polarized power. Similarly, double-bounce scattering with cross-polarized power also widely distribute in natural environment. From this perspective, both surface scattering and double-bounce scattering could give cross-polarized power in incoherent scattering. Neumann [
32] found that in forest, ground scattering has significant cross-polarized power. Therefore, it is wiser to apply incoherent models for ground scattering to explain cross-polarized power instead of unknown scattering mechanisms. The above idea is also supported in [
10,
15,
34]. Singh
et al. [
10] pointed out that, to understand the depolarization effects on the decomposition results, using extended incoherent ground scattering models are required. Lee
et al. [
15] tried to incorporate incoherent ground scattering models into Freeman-Durden decomposition.
A new decomposition was proposed in this paper. Since RSA is applied in the computation of volume scattering, the proposed decomposition could be considered as an improved version of van Zyl decomposition. Experiment using Uninhabited Aerial Vehicle Synthetic Aperture Radar (UAVSAR) data well demonstrated the effectiveness of the proposed decomposition.
4. Experiment
UAVSAR is a fully polarimetric L-band sensor designed for acquiring airborne repeat-track interferometry SAR data [
39]. Its applications include monitoring ground deformations, ice dynamics, volcano dynamics, local sea ice dynamics, time-varying evaporation and hydraulic properties of soils, and aboveground biomass [
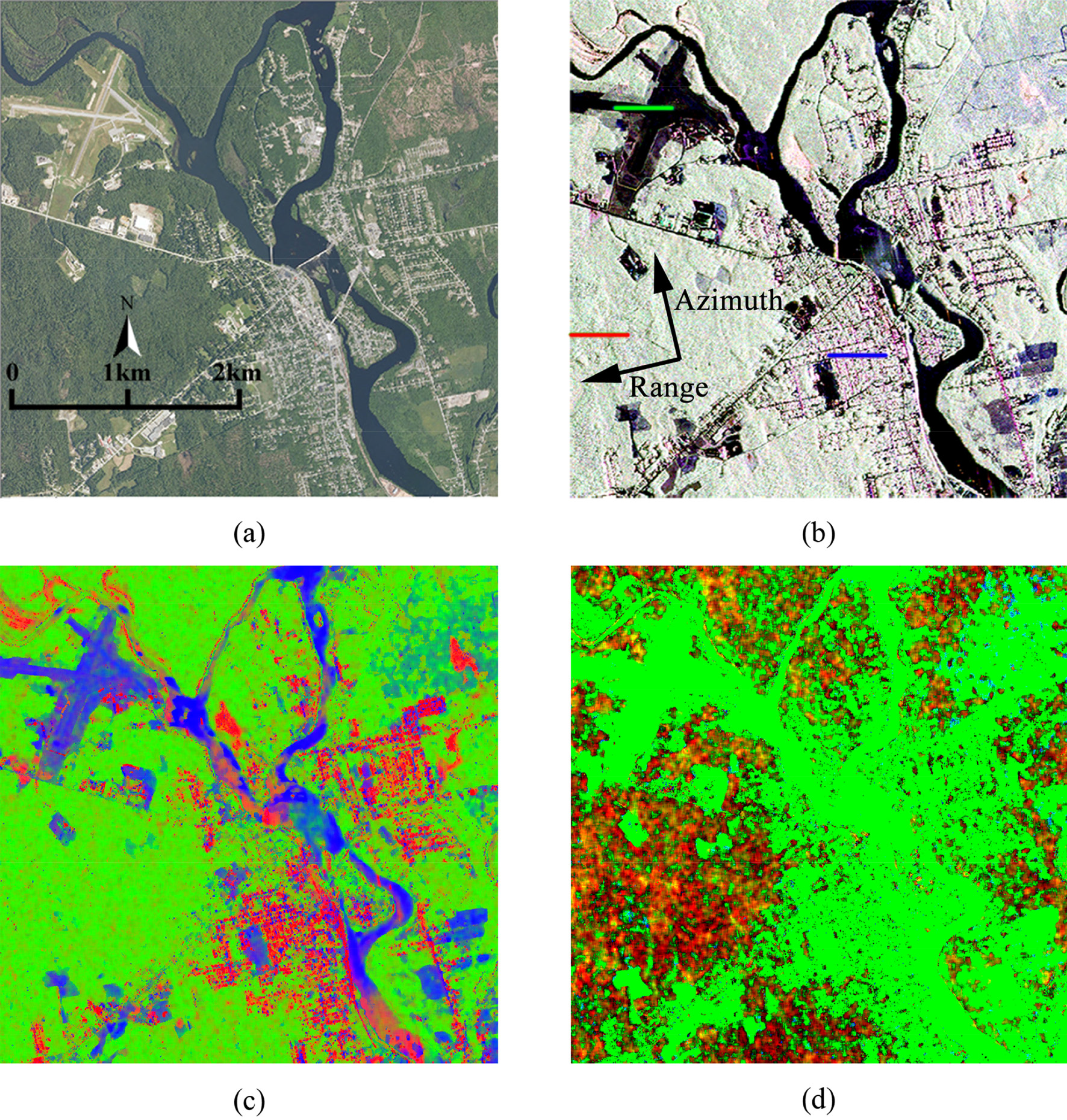
40]. UAVSAR data collected near Howland Forest, Maine, USA, on 5 August 2009 under a clear weather was used to test the applicability of proposed method. The study site is relatively flat and consists of forests, bare land, rivers, wetlands, road, buildings,
etc. The data was downloaded from Alaska Satellite Facility website [
41]. The look angle range is approximately [25°, 65°], while the local incidence angles vary within [0°, 90°]. Basic scattering area correction, antenna pattern correction and range dependent radiometric correction have been performed. The resolution of the ground range image is 5 m. Lee sigma filtering [
42] is implemented in a 9 × 9 window. The equivalent number of looks is hard to estimate for ground range image because of lack of single look data. However, in multi-look slant range image, ensemble averaging was implemented with 12 looks in azimuth direction and three looks in range direction.
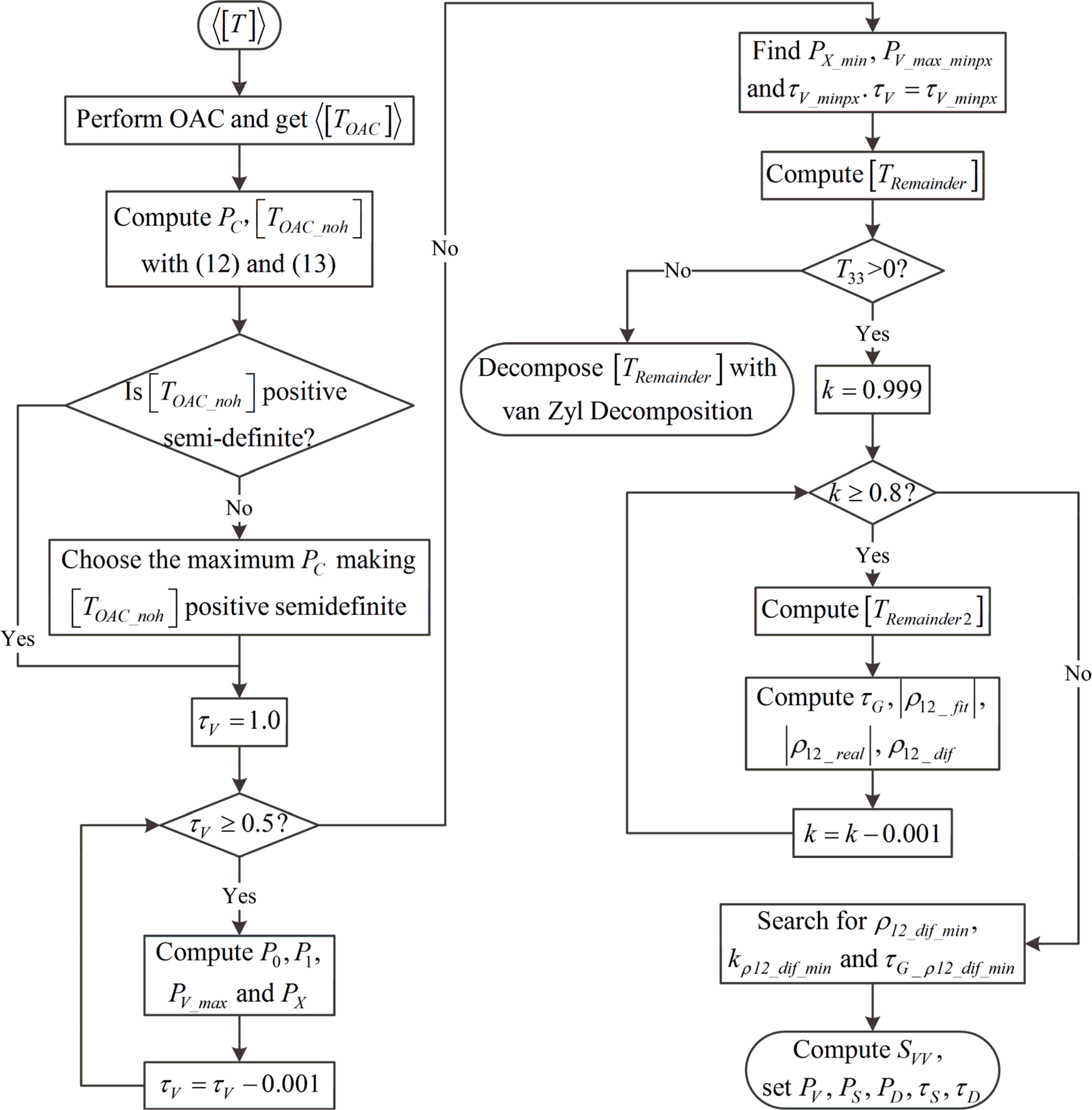
Among all pixels, 99.83% are perfectly fitted and only 0.17% cannot get good fitting of
T12.
Figure 3c is the image of component power normalized by
Pspan, where
Pspan is the span of 〈[
T]〉.
Figure 3d is the image of
τ of different components.
From
Figure 3c, we could see all the major land cover features are identified. Dense natural forests are colored with bright green, indicating
PV is large. A large proportion of dense natural forests are characterized by non-zero
PD and zero
PS, although not all.
τV mostly concentrates in [0.60, 0.90]. Non-zero
τD primarily locates in dense natural forests with value in [0.03, 0.35]. Only a small number of forest pixels show non-zero
τS. It is found that they mainly lie in the boundaries between forests and land with little vegetation cover. However, in forests with low canopy density, the pixels may have
τS = 0 and
τD = 0. In the upper right corner of the image, there exists a sparse forest. This area gets much higher proportion of
PS compared with dense forests. Since the tree cover is low, it is reasonable to have more surface scattering from ground. In most locations of this sparse forest,
τV = 1,
τS = 0, and
τD = 0, meaning volume scattering and helix scattering do explain all cross-polarized power. We could observe from
Figure 3d that, generally, in forest, the easier to be accessed by human beings or the lower canopy density, the more likely to have
τD = 0. We may interpret this phenomenon in the following way: in easily accessible forests, the terrain may be relatively flat and the understory may probably be underdeveloped; in the untraversed forests, the understory is fully developed, making the scattering process very complex. Most of the areas dominated by surface scattering, like river surfaces, airport, and grasslands, are colored with blue, showing that
PS is quite high. In these areas,
PS and
PD are obtained with van Zyl’s method, thus,
τS = 0 and
τD = 0. In urban areas, the main buildings are oriented parallel to SAR azimuth direction. Many pixels near buildings are characterized by high
PD while a small proportion show high
PS. An apparent characteristic of these areas dominated by surface scattering or double bounce scattering is, they almost all have
τV = 1,
τS = 0, and
τD = 0, which differs greatly from the dense natural forests.
The results of the proposed decomposition were compared with these of van Zyl decomposition and the other three latest NNED raised by Cui
et al. [
12] and Wang
et al. [
13]. Two NNED were raised by Cui
et al. [
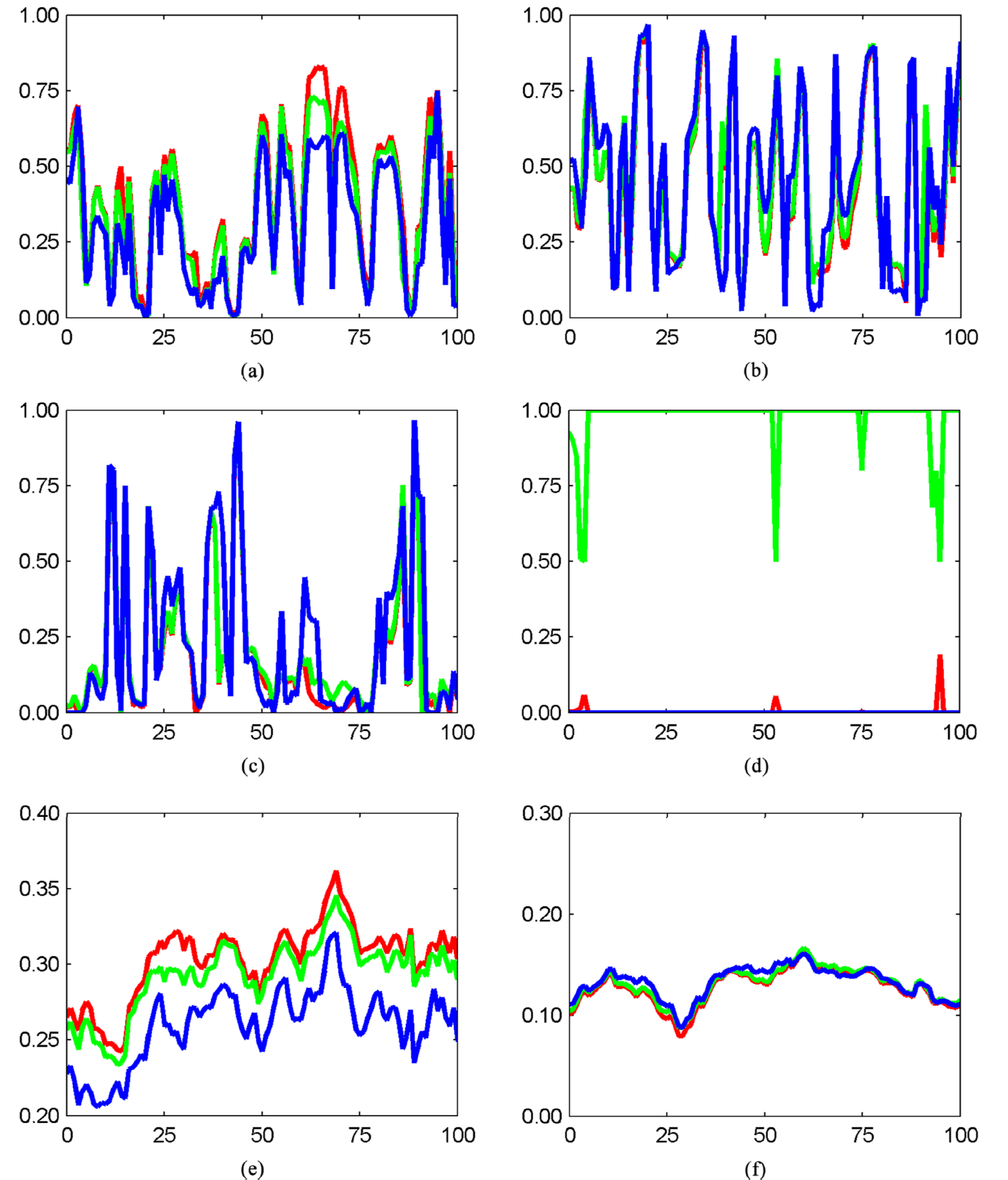
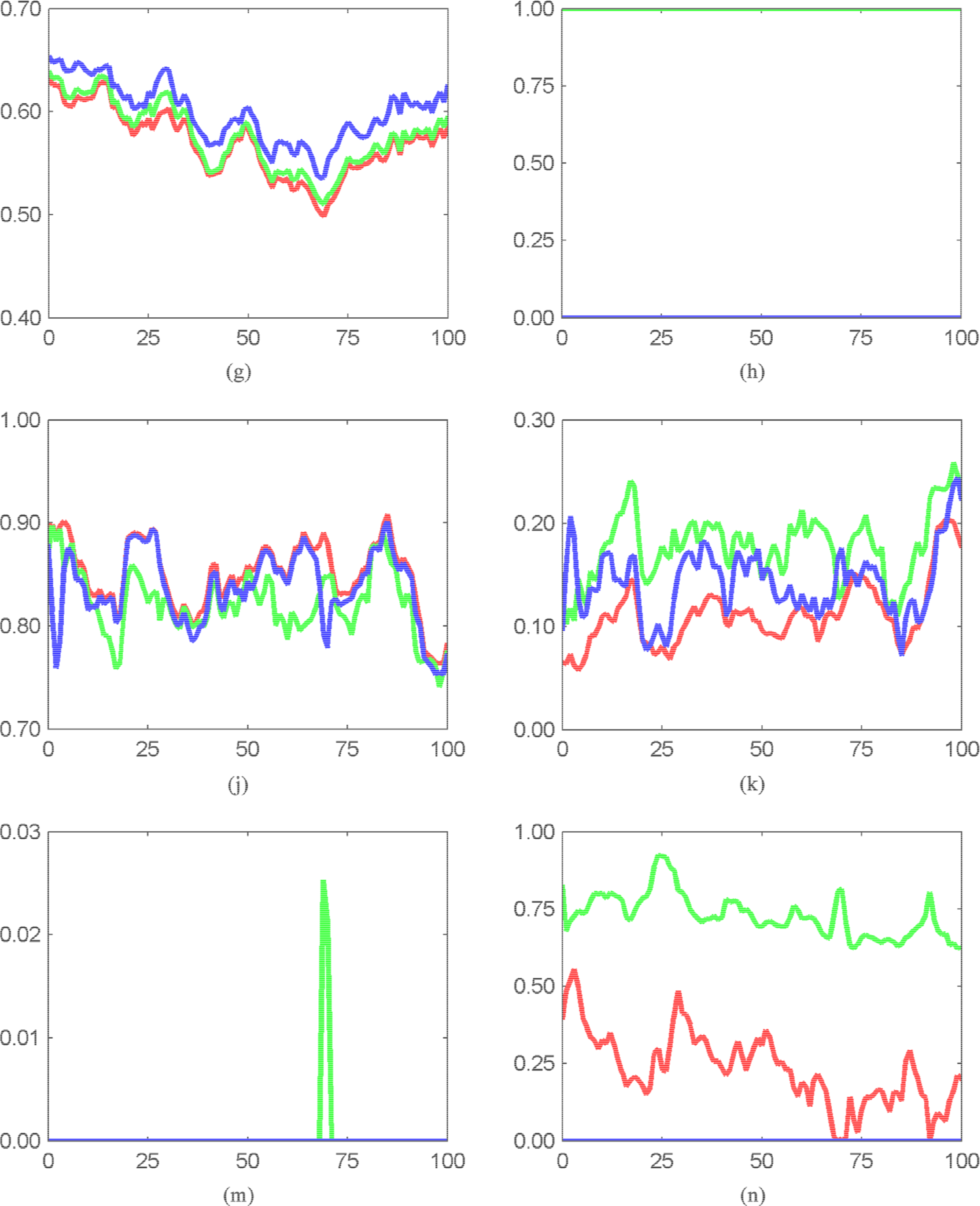
12] and they only differ in the decomposition of the remainder matrix, one is based on Eigen-decomposition, namely, Cui1, and the other on model fitting, namely, Cui2. It is found that the performance of Cui1 is not as good as Cui2 and Wang decomposition, while the results of Cui2 and Wang decomposition are quite similar. To avoid five profiles existing in one plot so the readers are confused,
Figure 4 only gives the profiles of Wang, van Zyl and the proposed decomposition along three 500-m-long lines in
Figure 3b. Red, green, and blue lines cover natural forests, airport, and urban areas, respectively.
Compared with van Zyl decomposition with OAC, the proposed decomposition lowered the estimation of
PV in all pixels. The degree is −7.72% on average and the standard deviation is 0.103. In airports and almost all building areas, the proposed method gives the lowest estimation of
PV. In locations 63 to 68 of
Figure 4a,
PV/
Pspan is reduced by over 0.10. Consequently, at most locations, the
PS +
PD by the proposed decomposition are generally higher or at least equal to that by other decompositions. Several isolated pixels have positive
τD, which may correspond to the trees in urban areas. In airport,
PV/
Pspan is lowered by more than 0.03, so we could observe the evident elevation of
PS.
PD by all three decompositions are approximately the same.
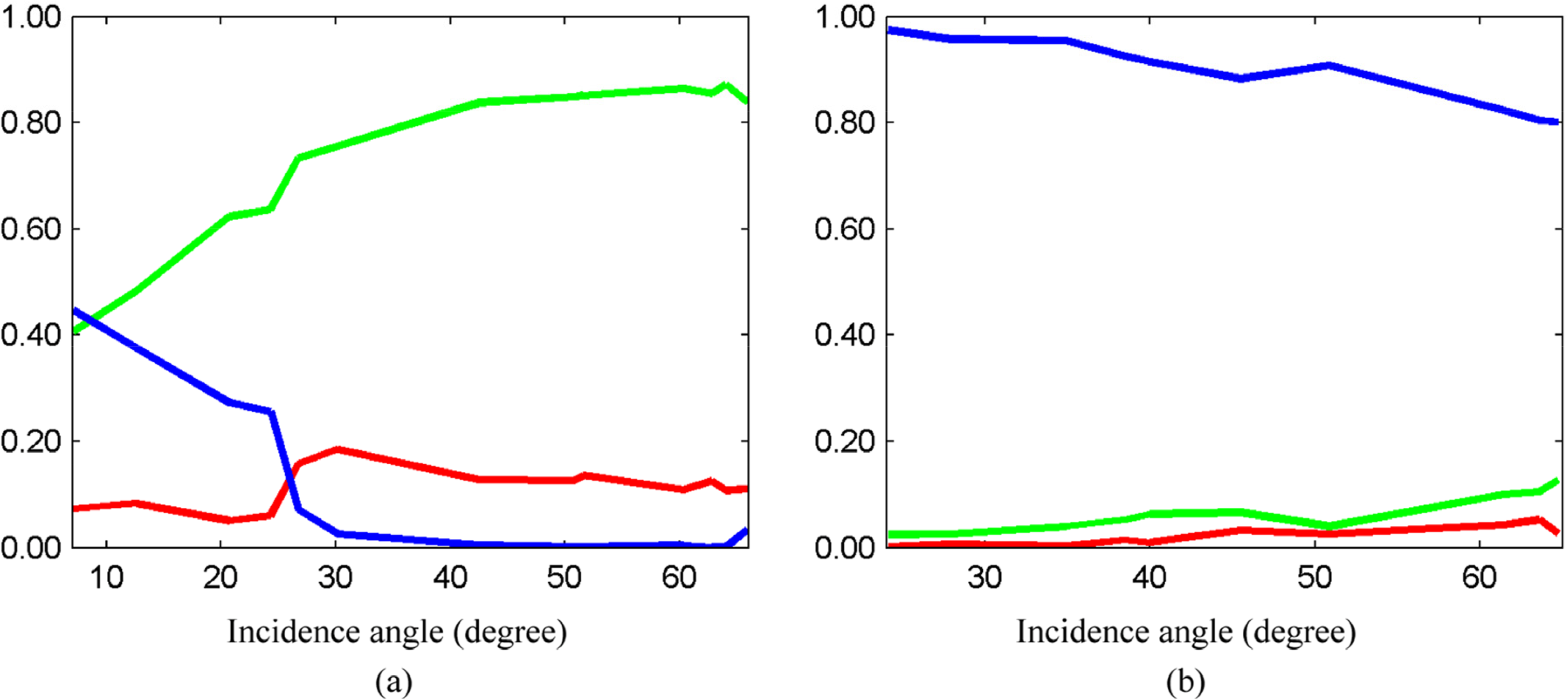
The dependency of decomposition results upon local incidence angles (short for incidence angle) was partly investigated. It is well known that SAR backscatter is influenced by land cover types and local incidence angle. Many land cover types reside in this study area, but it is difficult to select pixels with exactly the same land cover but different incidence angles. For simplicity, the authors just did this investigation for dense natural forests and lakes. First, dense natural forest and lake samples with the size 41 × 41 were selected in PolSAR image with the assistance of optical images. These samples could be roughly thought to be homogeneous inside. Next, the mean values of span-normalized powers of different components in diverse samples were plotted against their incidence angles (see
Figure 5).
From
Figure 5a, it seems the perspective that volume scattering dominates in dense natural forests only holds when the incidence angle is larger than a value, for example, 18°. When the incidence angle is medium or large,
PV/
Pspan can be over 0.75 and double-bounce is much stronger than surface scattering. However, if the incidence angle is smaller than a value, like 26°, with the decreasing of incidence angle,
PV/
Pspan drops quickly, at the same time,
PS/
Pspan goes up fast and surpasses
PD/
Pspan. If the incidence angle is smaller than 10°,
PS/
Pspan could be even larger than
PV/
Pspan.
To understand above facts, the authors treat the volume scattering caused by canopies to be approximately isotropic [
43], thus, when other factors are fixed, the volume scattering power does not vary much when incidence angle changes. However, the ordinary ground or soil is not isotropic. The smaller incidence angles the stronger surface scattering power; the larger incidence angles the weaker surface scattering power. In forest, double-bounce scattering is usually caused by ground-trunk structure. When the incidence angle is large, although the first scattering occurring at ground is not so strong, the microwave backscattered by the tree bark could be relatively strong due to the smooth bark and small incidence angle of the second scattering. On the contrary, when the incidence angle is small, the second scattering occurring at bark has very large incidence angle, possibly making the backscattered microwave be weak in comparison to surface scattering. Here, we summarize that, with the decreasing of incidence angle,
PS,
Pspan, and
PS/
Pspan gradually increases;
PV/
Pspan drops which is mainly due to the increasing of
Pspan.
Evidently, lakes are dominated by surface scattering, which is supported by the decomposition results in
Figure 5b. No matter the incidence angle is small or large,
PS/
Pspan is always much larger than
PD/
Pspan and
PV/
Pspan. A basic trend is the larger incidence angle the smaller
PS/
Pspan.
Cheng [
38] simulated PolSAR data with Bragg scatterer and incoherent scattering models. He observed such trend for surface scattering-dominated samples. He also found that the larger incidence angle the larger
T33/
Pspan. Since in most lake pixels, volume scattering and helix scattering explain all cross-polarized power, and
τV = 1, we could easily infer that
PV/
Pspan increases with
T33/
Pspan or incidence angle.
5. Discussion
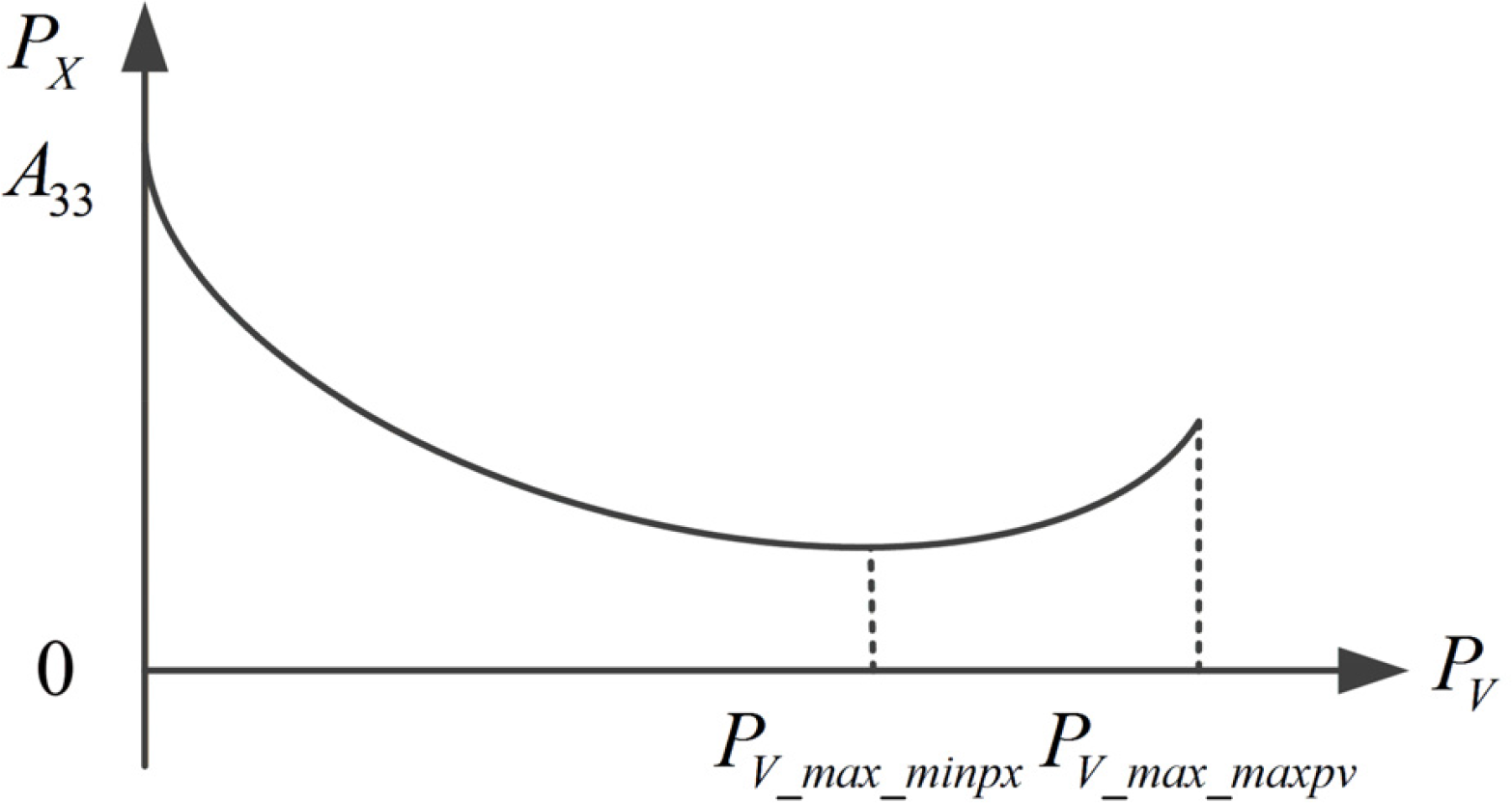
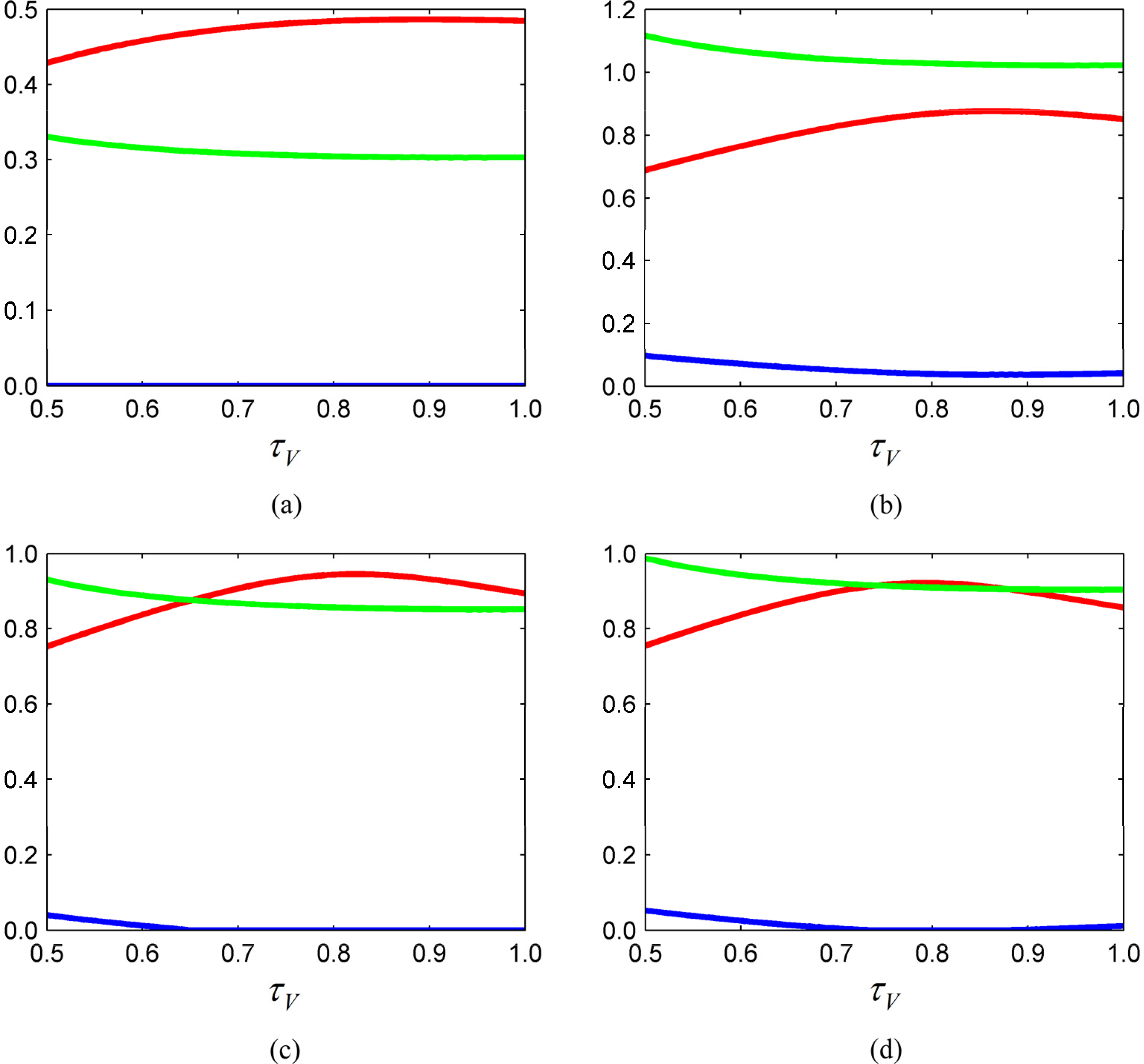
Experiment revealed the dependence of the decomposition results on land covers. Analytically explaining why these results are like this is challenging because many parameters are involved, so the authors show the relationship between
τV and
P0,
P1,
PX for four pixels, one is in airport and the other three are in forest (see
Figure 6). Please note that if
PV_max =
P1, then
PX = 0; if
PV_max =
P0, then
PX > 0
From the sub-figures in
Figure 6, we could know
P1 is a monotonous decreasing function of
τV. The relationship between
P0 and
τV is more complex:
P0 first monotonously increases with
τV until reaches a peak at
τV =
τV_0, then monotonously decreases with
τV.
The line of
P0 and the line of
P1 are possible to have zero (see
Figure 6a,b), one (see
Figure 6c) or two (see
Figure 6d) cross points. When these two lines do not intersect, then the situations are simple. It is observed that land covers dominated by surface scattering and double-bounce often have
A33/
Psp < 0.15, or even
A33/
Psp < 0.10, where
Psp is the span of [
TOAC_noh]. For the same
τV,
P1 is always smaller than
P0 (see
Figure 6a), then
PV_max =
P1. Finally,
τV_maxpv = 0.5 <
τV_minpx = 1.0,
PV_max_maxpv.= 4
A33/(1 −
g(0.5)) >
PV_max_minpx = 4
A33· But as observed in UAVSAR data, dense natural forests usually show
A33/
Psp > 0.20. If
A33/
Pspan > 0.25, then
P1 ≥ 4
A33 >
Psp, so the
P1 line and
P0 line never intersect,
PV_max =
P0 (see
Figure 6b). In this case,
τV_maxpv =
τV_0 <
τV_minpx,
PV_max_maxpv >
PV_max_minpx· Please remember that the
P0 line and
P1 line may do not intersect even when
A33/
Psp ≤ 0.25. Some forest pixels have
P0 line and
P1 line intersected with one or two cross points. When there is one cross point (see
Figure 6c), assume the cross point is (
τV_1,
PV_max_
1), then in [0.50,
τV_1],
PV_max =
P0; in [
τV_1, 1.0],
PV_max =
P1· Finally,
τV_maxpv =
τV_1 <
τV_minpx = 1.0,
PV_max_maxpv =
PV_max_
1 >
PV_max_minpx = 4
A33· When there are two cross points, assume the two cross points are (
τV_1,
PV_max_
1) and
τV_2,
PV_max_
2), and
τV_2 >
τV_1, then in [0.50,
τV_1] and [
τV_2, 1.0],
PV_max =
P0; in [
τV_1,
τV_2],
PV_max =
P1· Finally,
τV_maxpv =
τV_1 <
τV_minpx =
τV_2,
PV_max_maxpv =
PV_max_1 >
PV_max_minpx =
PV_max_2·Why
PV by the proposed decomposition is lower than that by van Zyl decomposition has been proven in previous sections. When it comes to the comparison between the proposed method and Wang decomposition, quantitatively explaining is much more difficult because Wang decomposition computes volume scattering parameters without RSA which is equal to solving cubic equations. Cheng [
38] proved that for a fixed [
TV],
PV computed without RSA is usually smaller than that computed with RSA. As a result, we are not sure whether
PV computed without RSA and with maximum
PV criterion is larger, or
PV computed with RSA and minimum
PV criterion is larger. That explains the situations of forest. For pixels dominated by surface scattering and double-bounce scattering, Wang decomposition commonly gives
τV = 0.5, on the contrary, the proposed method has
τV = 1.0. According to
Equation (21), to explain the same amount of cross-polarized power,
PV by Wang decomposition needs to be larger than that by the proposed method.
With simulated data, Cheng [
38] found the proposed decomposition works worst in areas dominated by double-bounce scattering. In surface scattering-dominated areas, the cross-polarized power is usually relatively low, so even if we think cross-polarized power is entirely from volume scattering, the given
PV will not be large. For areas dominated by volume scattering, letting volume scattering explain the most cross-polarized power in theory is reasonable to a large degree. However, it was pointed out in [
36,
37] that
T33 of double-bounce scattering model may be comparable to that of volume scattering model. In other words, sometimes, double-bounce scattering produces significant cross-polarized power. Minimum
PX criterion forces volume scattering to explain as much cross-polarized power as possible. Therefore, a proportion of explained cross-polarized power is probably from double-bounce scattering instead of volume scattering. In this sense,
PV may be overestimated.
6. Conclusions
The main differences between the proposed method and van Zyl, Cui, Wang’s NNED include: (1) helix scattering are introduced in our method; (2) our method use minimum PX criterion while the three NNED use maximum PV criterion; (3) sometimes the dominant ground scattering is described by incoherent and depolarizing models, so there is no remainder component. In the three NNED, ground scattering are all coherently modeled; (4) to describe ground scattering, Cui and Wang NNED use elemental scatterers with SHV ≠ 0, but our method utilizes elemental scatterers with SHV = 0.
Negative component power is completely avoided in the proposed decomposition. In the experiment done by Cheng [
38] with simulated data, he found that compared with van Zyl decomposition, the proposed method is capable of partly lessening volume scattering overestimation, which is mainly achieved by introducing helix scattering, utilizing minimum
PX criterion, and performing two-component fitting to [
TOAC_noh]. But Cheng [
38] also emphasized that minimum
PX criterion could not fully eliminate
PV overestimation in that volume scattering probably cannot explain the most cross-polarized power in theory. Ground scattering also contributes to cross-polarized power. The proposed method usually better estimates the power of each component than van Zyl, Wang and Cui decomposition. One significant advantage of the proposed method is, when volume scattering and helix scattering cannot explain all cross-polarized power, the dominant ground scattering is modeled by depolarizing models, so that its orientation angle randomness could be obtained. In the proposed decomposition, all cross-polarized power is explained by models with solid physical meanings.
How to utilize the power, complex scattering coefficients, orientation angle randomness of different components given by the proposed method for the applications like land cover mapping, scattering mechanism classification, understory mapping, or surface roughness and soil moisture estimation, needs more research. Another future research direction is proposing a decomposition that computes volume scattering parameters without RSA to utilize T13 in [TOAC_noh].


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






