
Spatial Resolution Enhancement of Hyperspectral Images Using Spectral Unmixing and Bayesian Sparse Representation


Abstract
:
1. Introduction
- Rather than using the sparse representation method of [13], we use the BS method [15]. In [19], BS has been shown to be superior to popular fusion techniques such as modulation transfer function generalized Laplacian pyramid (MTF-GLP) [20], modulation transfer function generalized Laplacian pyramid with high-pass modulation (MTF-GLP-HPM) [21] and guided filter PCA (GFPCA) [22].
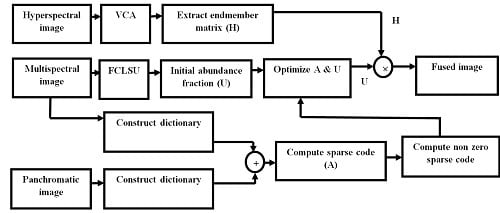
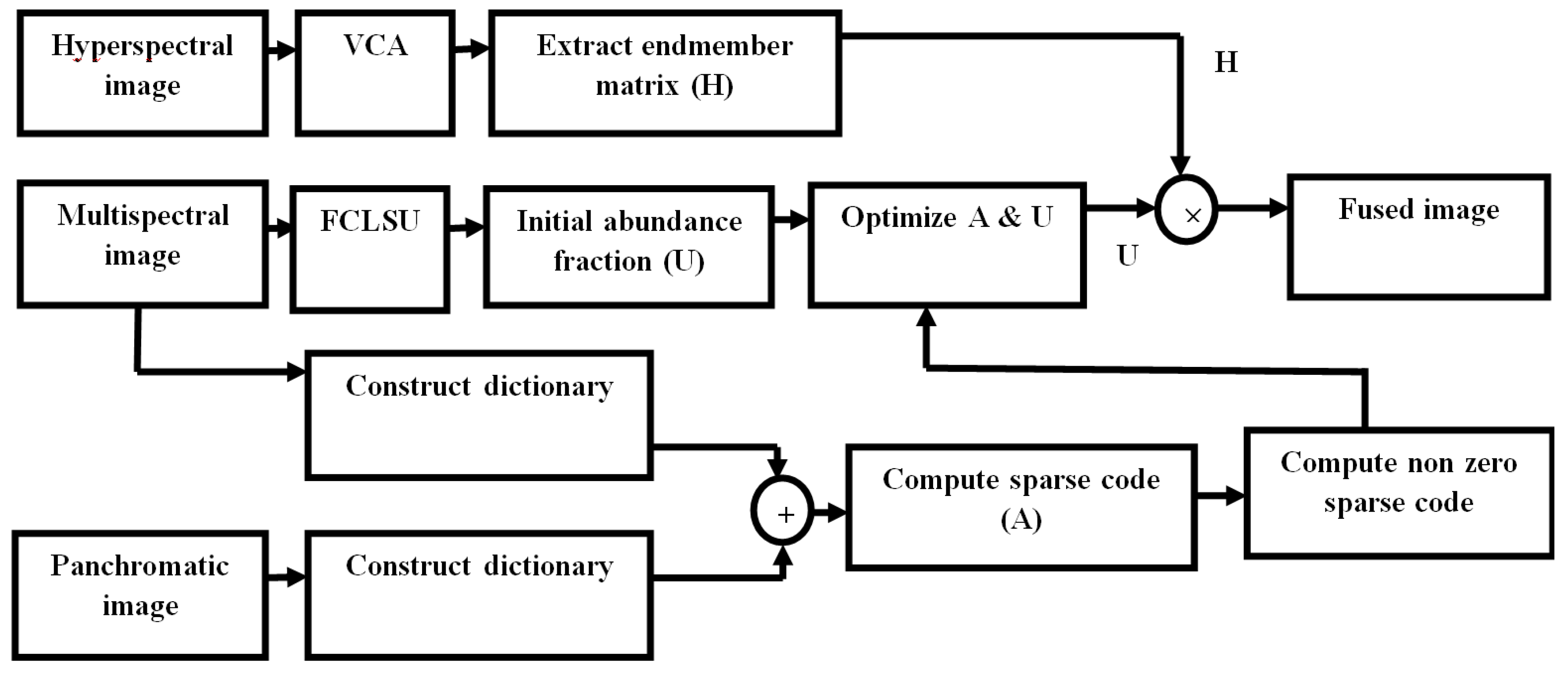
- Spectral unmixing is introduced in the BS procedure. In particular, SU is applied and the endmember matrix is directly extracted from the LRHSI. The abundance fractions are then estimated using BS. In fact, the SU procedure replaces the PCA dimensionality reduction step of the original BS.
- Another modification is related to the selected dictionary for the sparse representation. In the original BS method, this dictionary is constructed from the MSI and HSI. In the proposed method, we consider two weighted dictionaries as a sparse regularizer, constructed from some high resolution panchromatic or synthetic aperture radar images and the MSI. The extra dictionary improves the spatial resolution of the reconstruction.
- Compared to the SUSC method, where a dictionary is estimated for the whole abundance matrix, in the proposed method, a dictionary is estimated for each endmember separately. In addition, the proposed method takes into account the Gaussian noises of the HSI and MSI, hereby reducing the noise in the fusion process.
2. Proposed Method
2.1. Observation Model
2.2. Spectral Unmixing
2.3. Bayesian Sparse Representation
2.4. Sparse Regularization Term
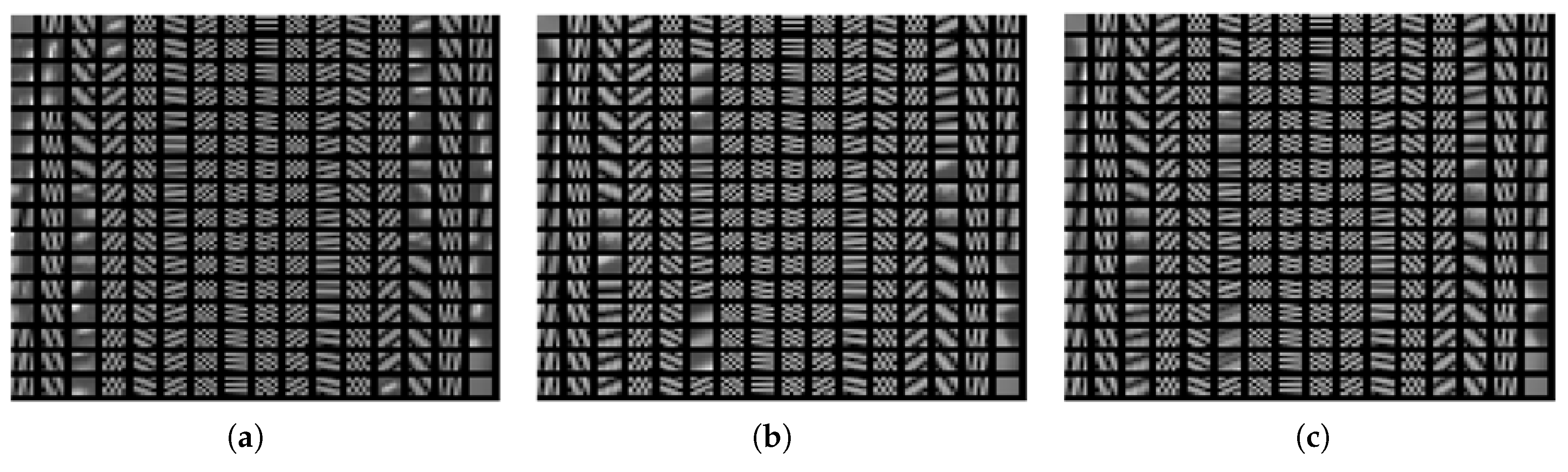
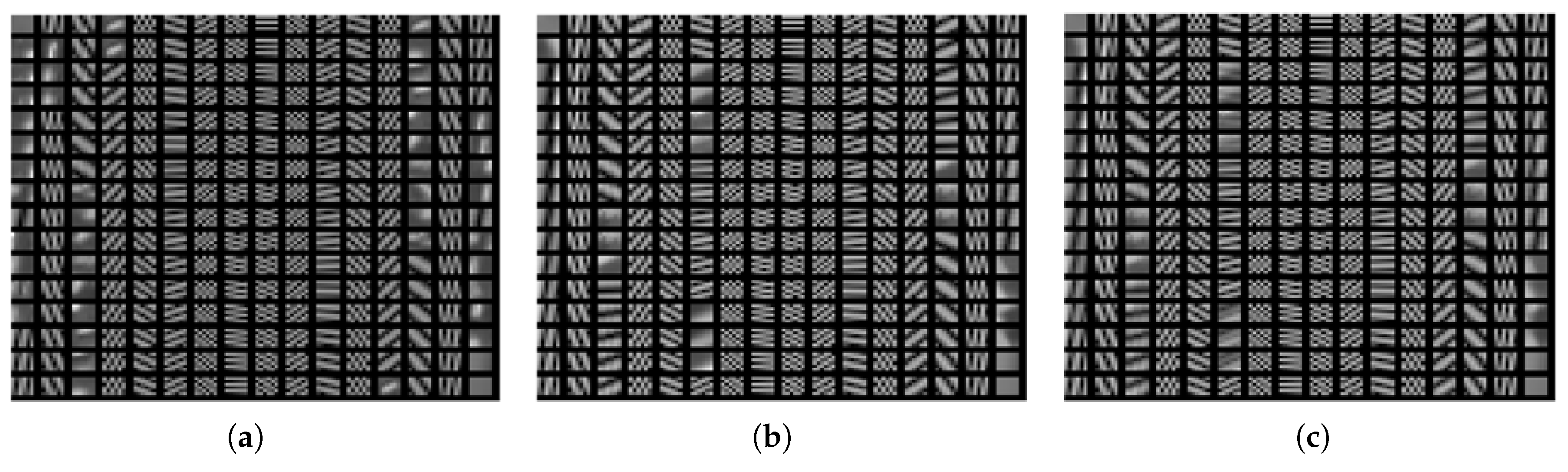
2.5. Dictionary Learning
2.6. Alternate Optimization
2.6.1. ADMM Step
2.6.2. Patchwise Sparse Coding
| Algorithm 1: Proposed Method (SUBS) |
| Input: , , , , : maximum number of iterations, : maximum number of atoms , and |
| Output: (HRHSI) |
| 1. Estimate B and R |
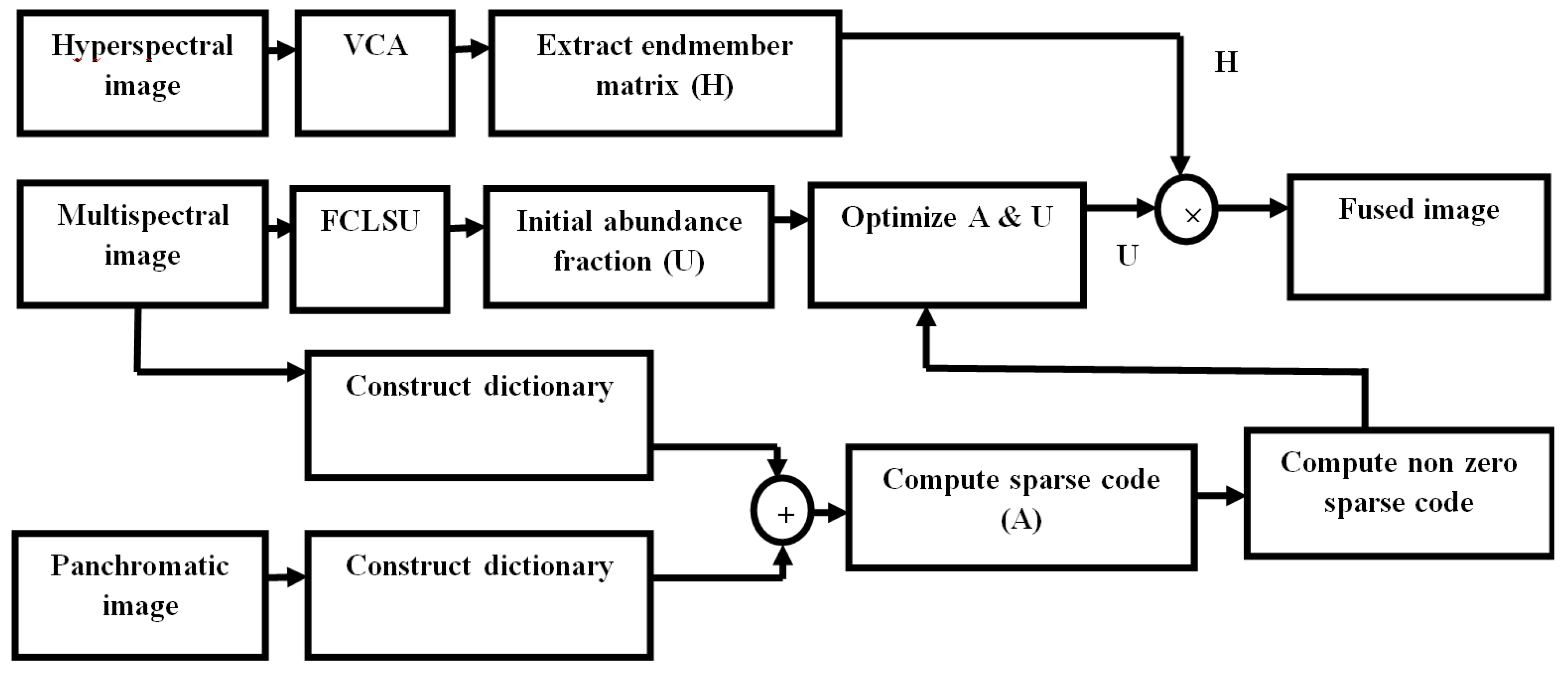
| 2. Apply VCA to and extract endmember matrix H |
| 3. Apply FCLSU [23] to and extract initial abundance fraction |
| 4. for i=1: p |
| Construct from PAN or SAR using ODL [25] |
| Construct from using ODL [25] |
| = + |
| Estimate sparse code matrix using OMP [26] (see Equation 9) |
| Extract nonzero elements of sparse code matrix from |
| end |
| 5. for t=1,2,..., |
| Optimize w.r.t. U (SALSA) |
| Optimize w.r.t A (LS regression) |
| end |
| 6. |
3. Experimental Results
3.1. Real Hyperspectral Datasets
3.1.1. Pavia Dataset
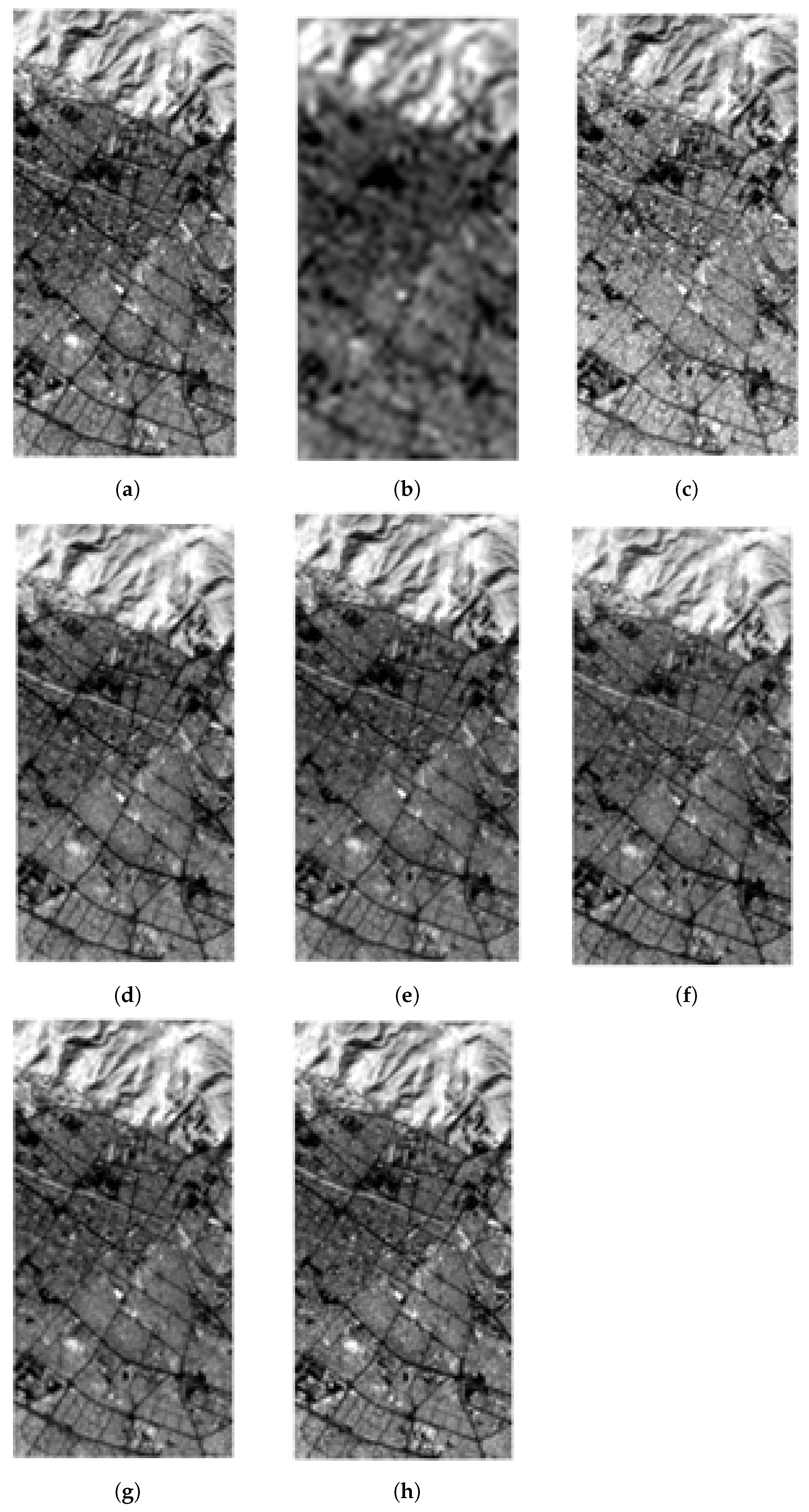
3.1.2. Shiraz Dataset
3.2. Fusion Quality Metrics
3.2.1. Signal-to-Noise Ratio (SNR)
3.2.2. Universal Image Quality Index (UIQI)
3.2.3. Spectral Angle Mapper (SAM)
3.2.4. Relative Dimensionless Global Error in Synthesis (ERGAS)
3.2.5. Degree of Distortion (DD)
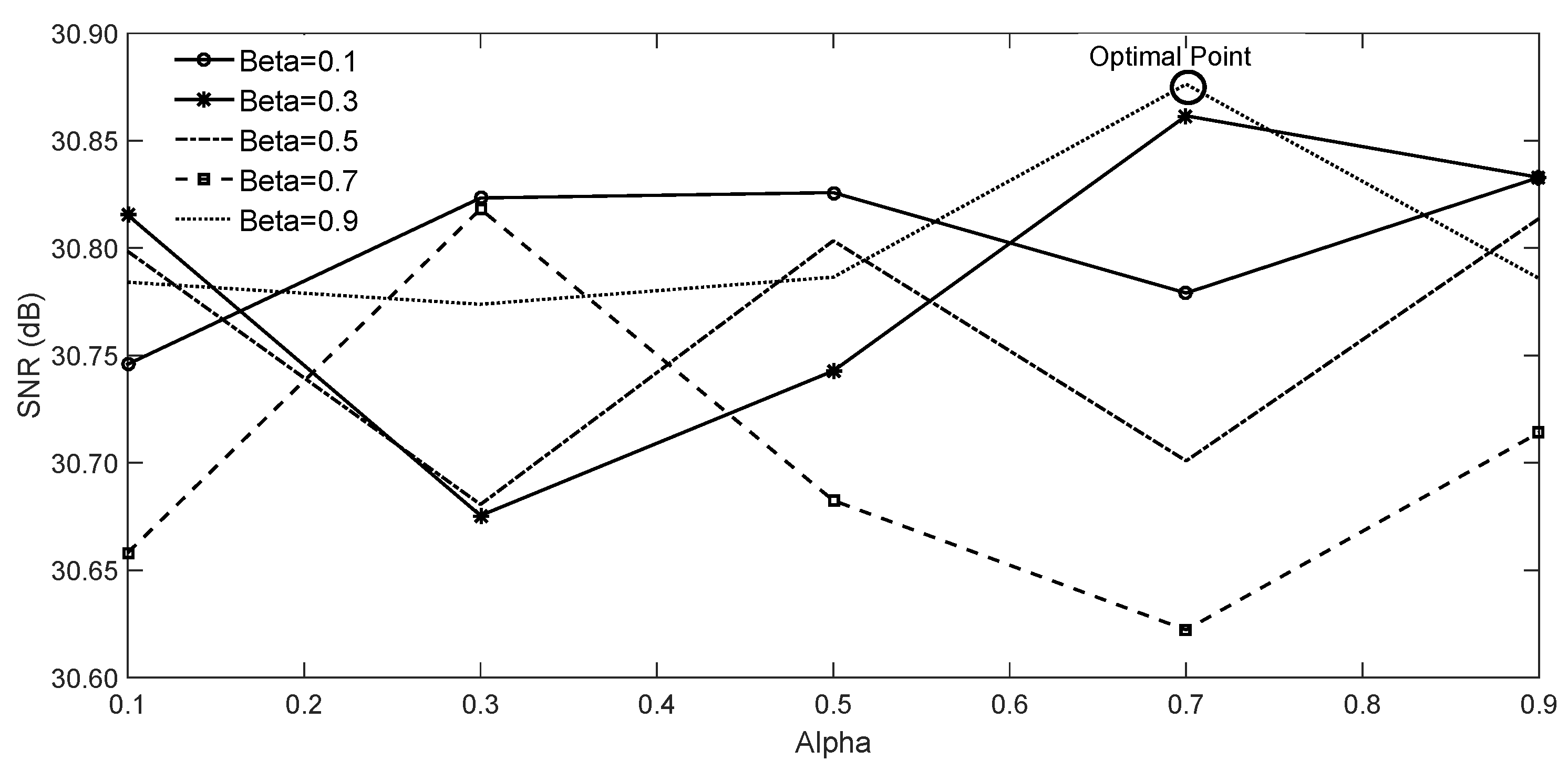
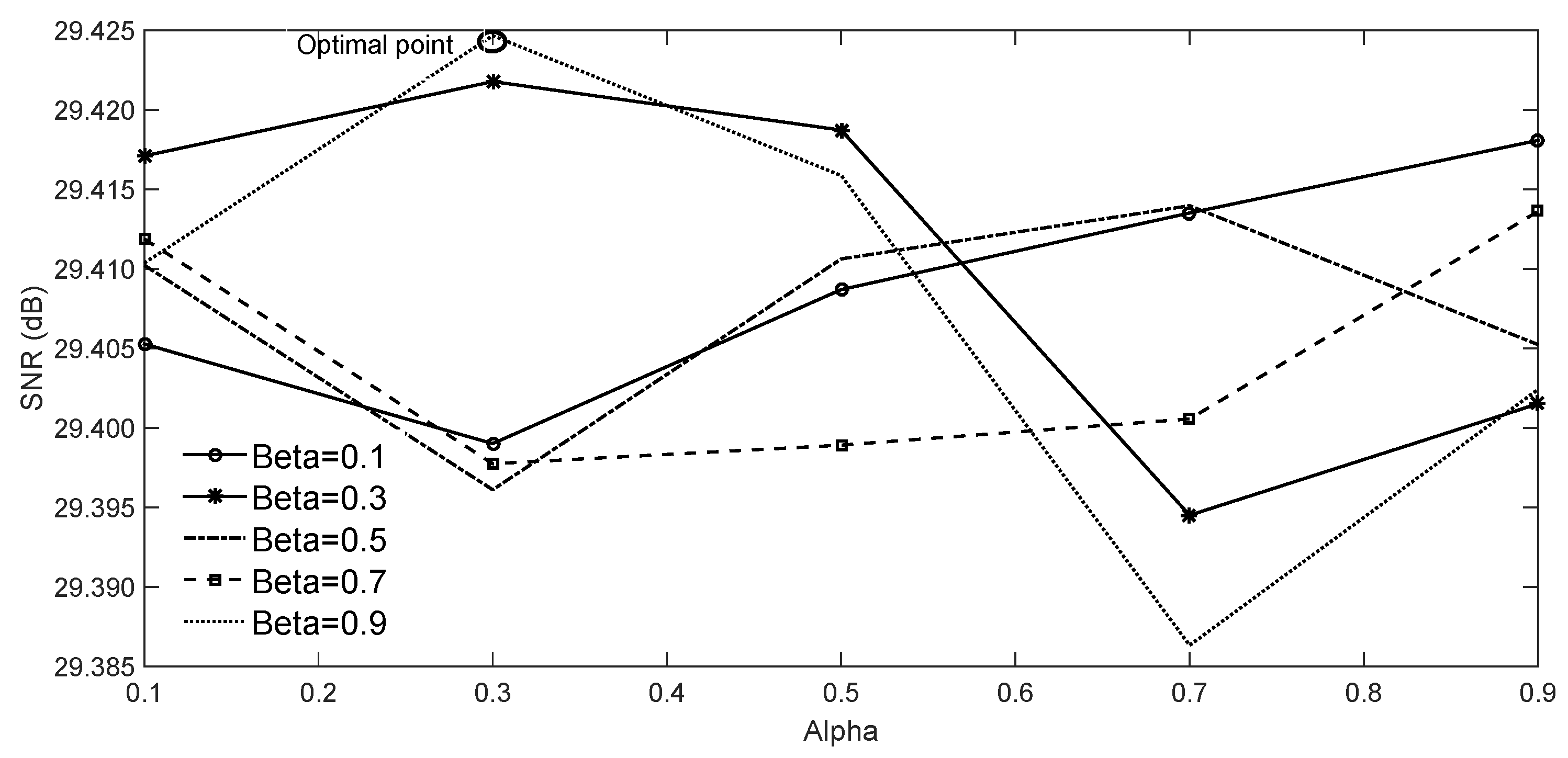
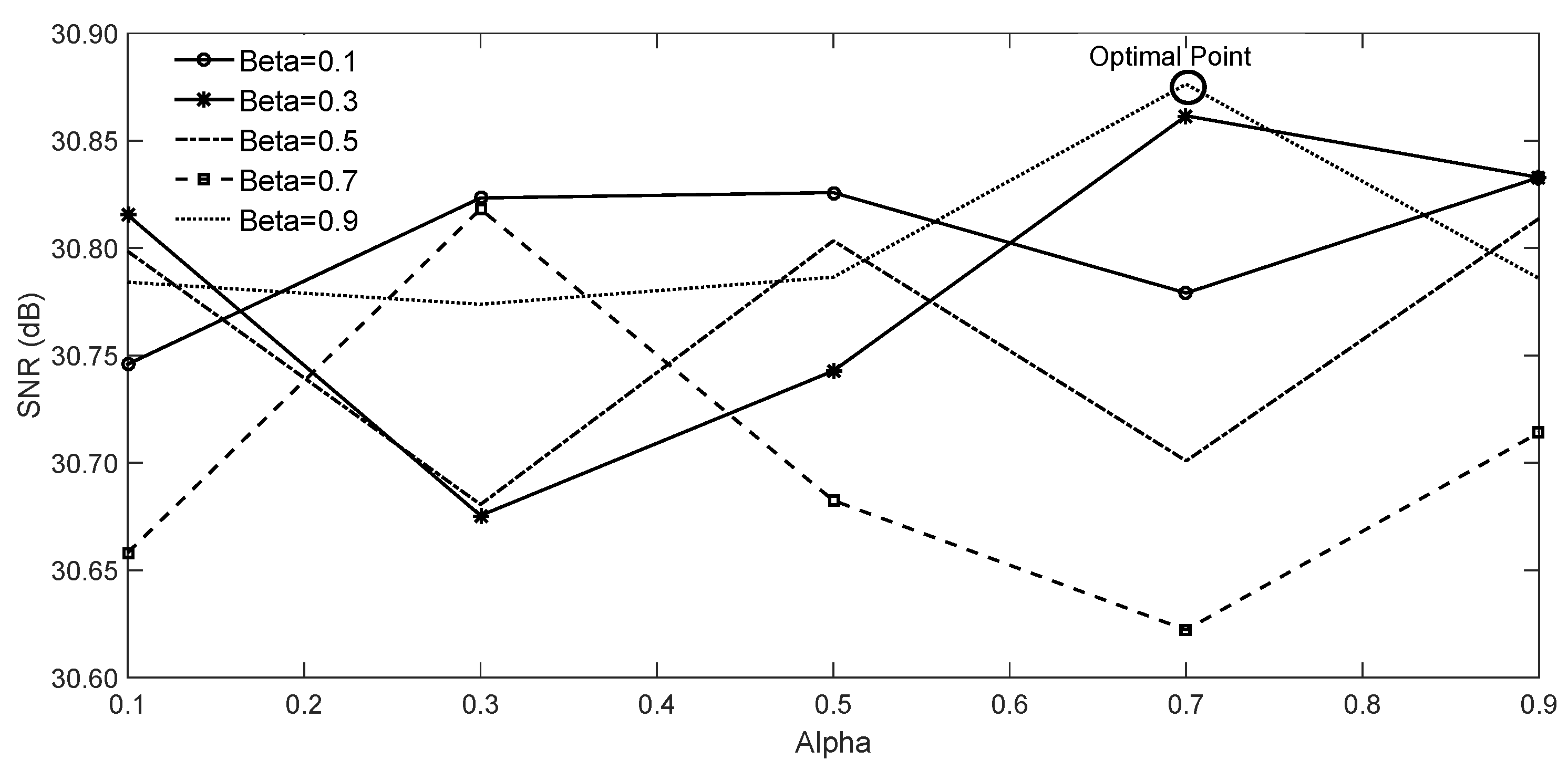
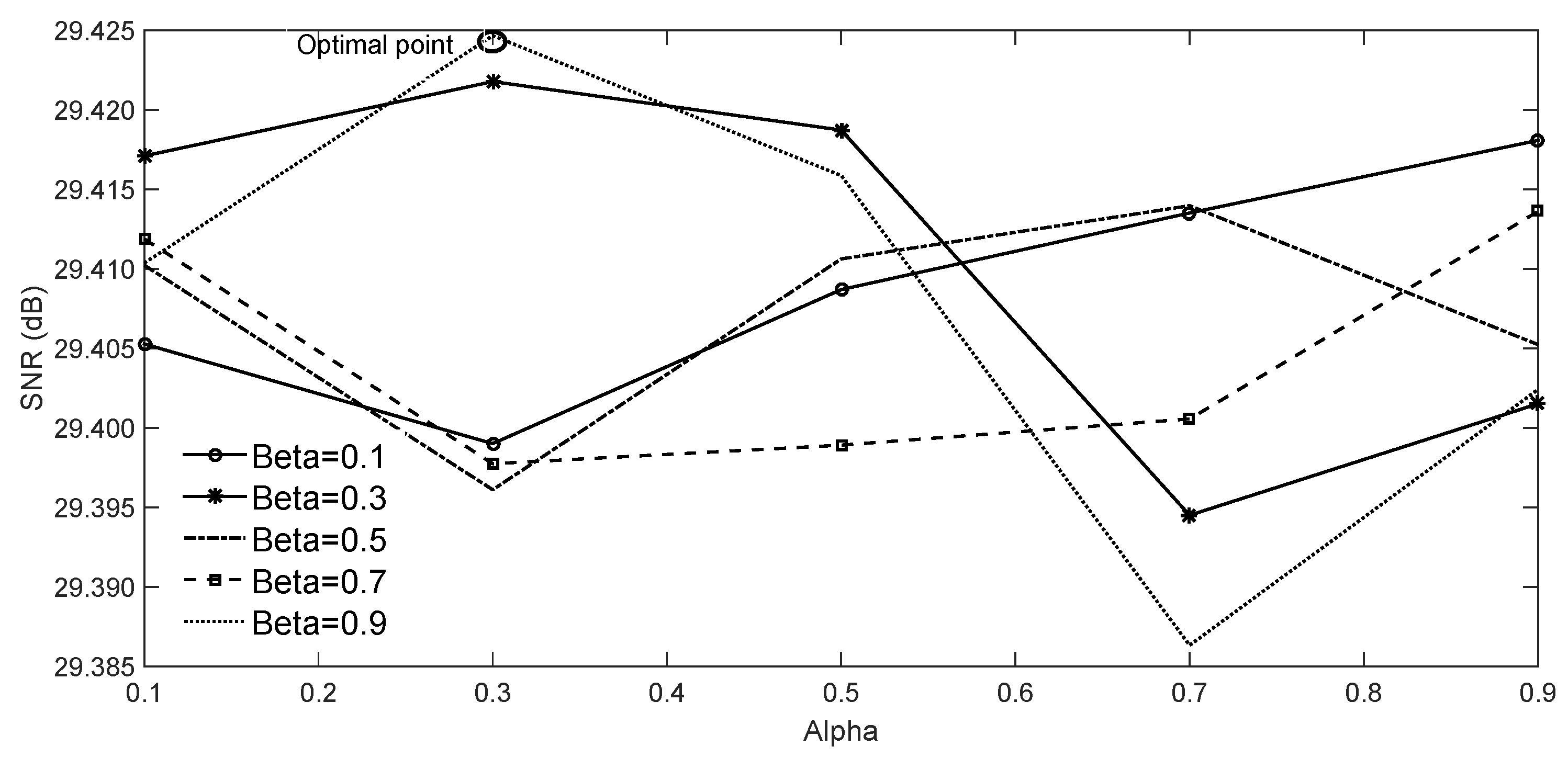
3.3. Parameter Settings
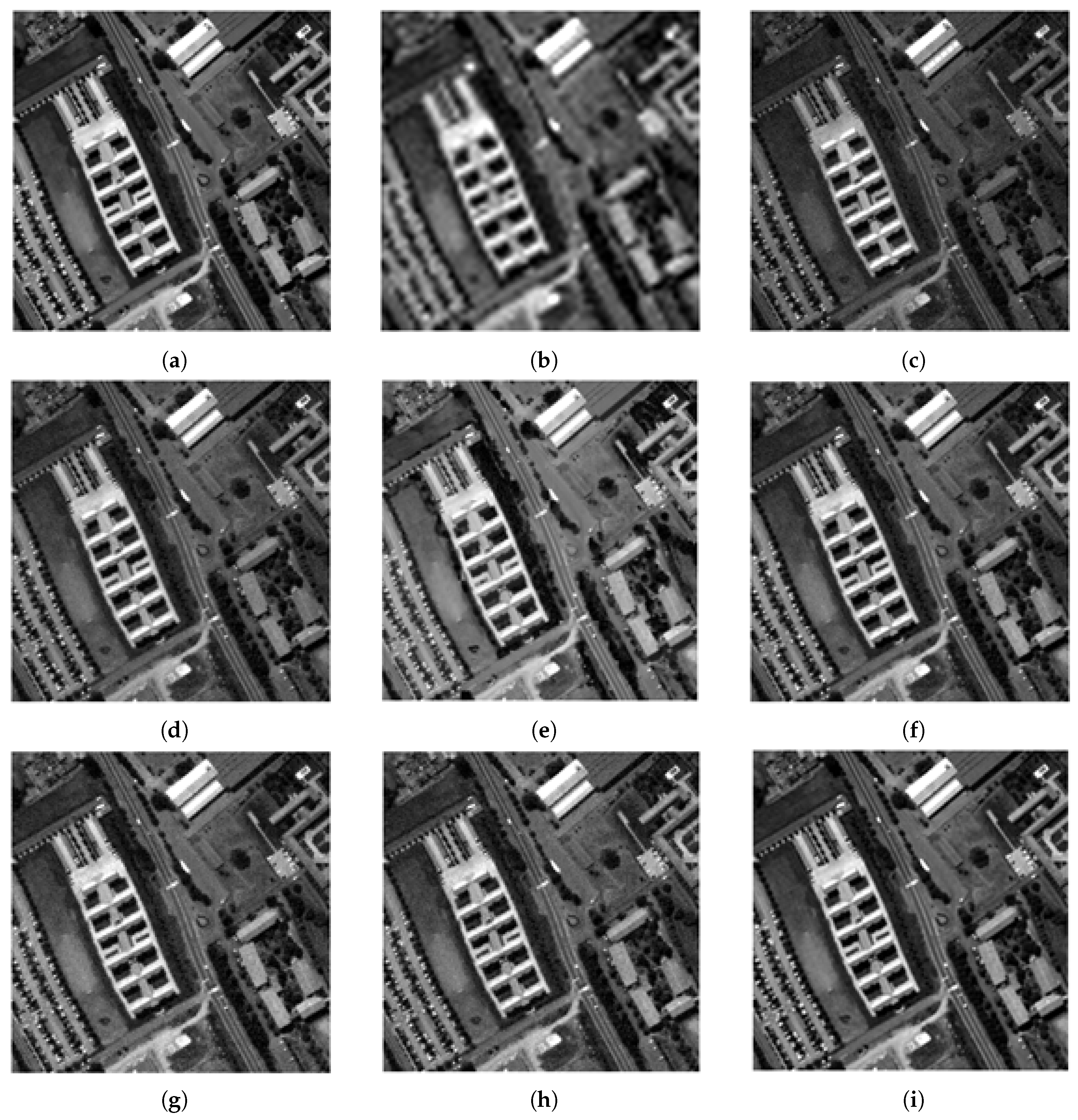
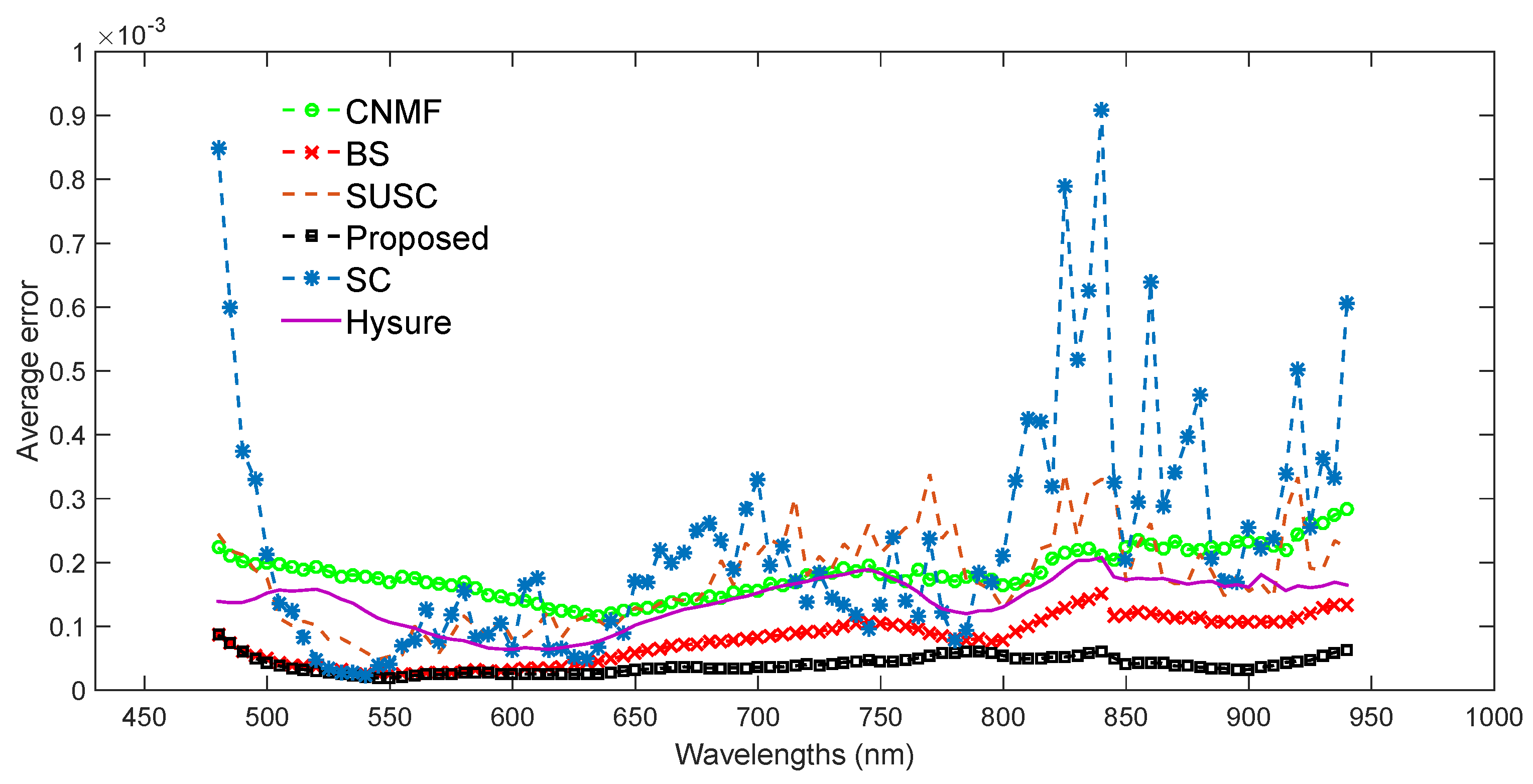
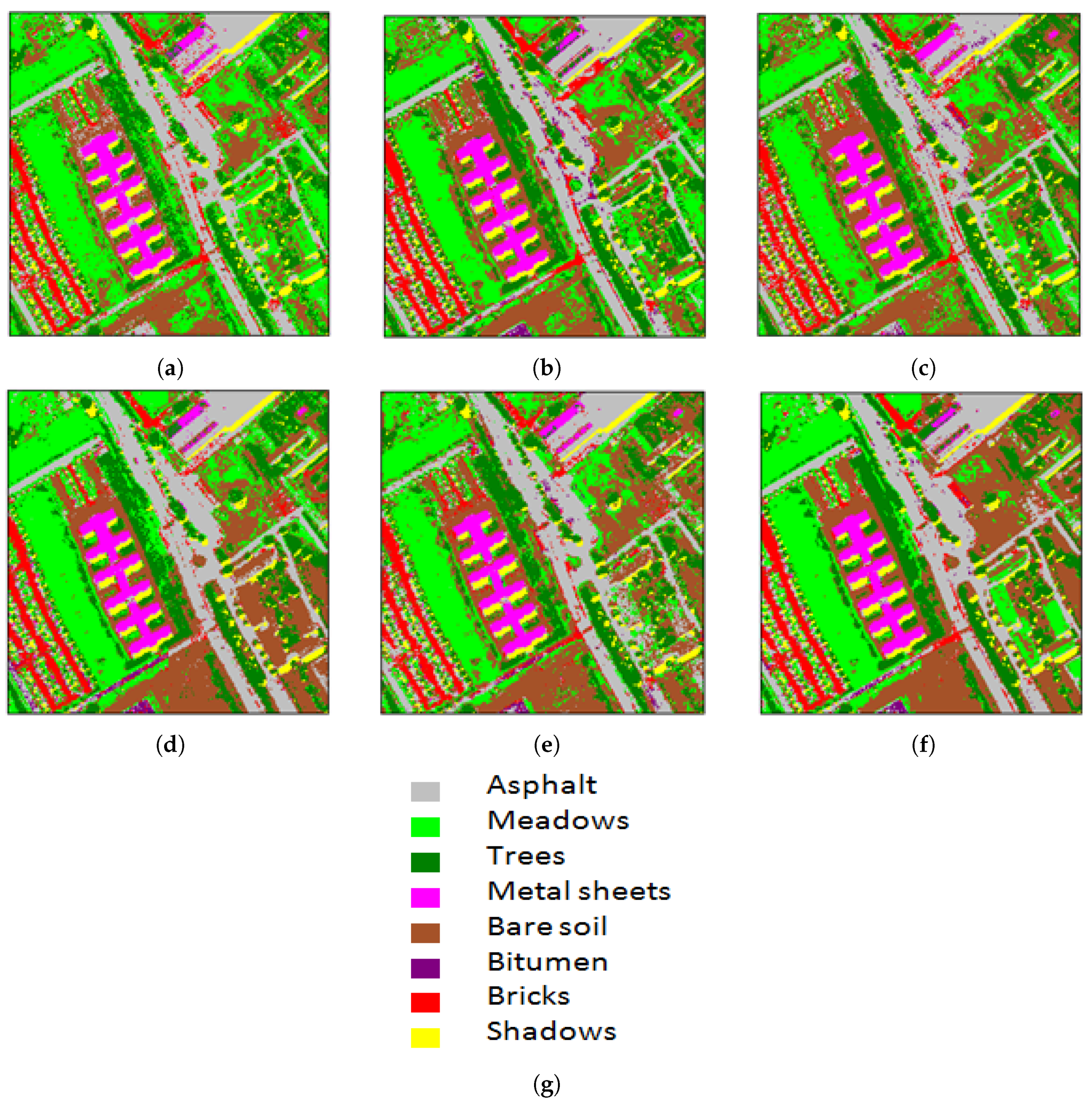
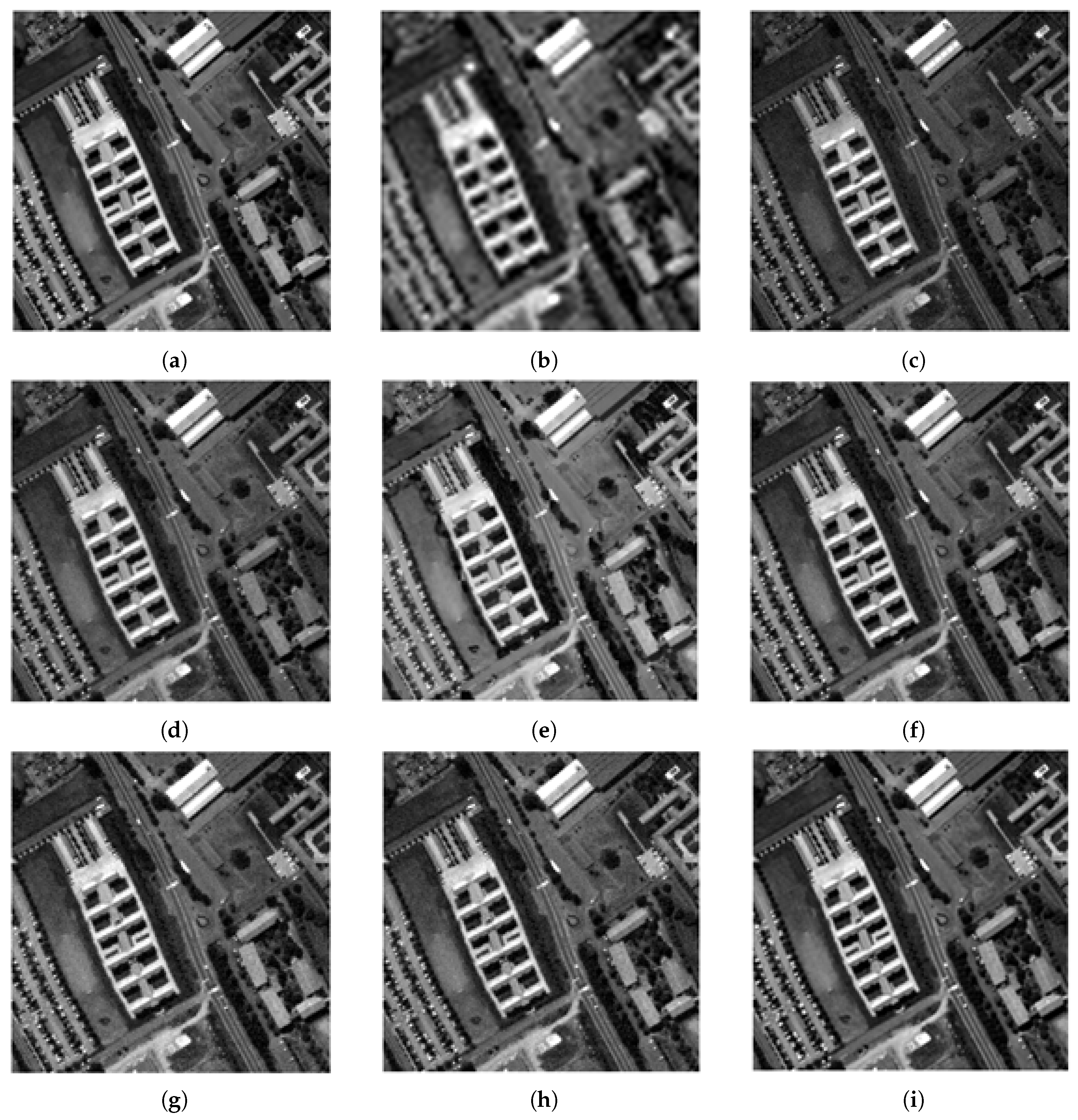
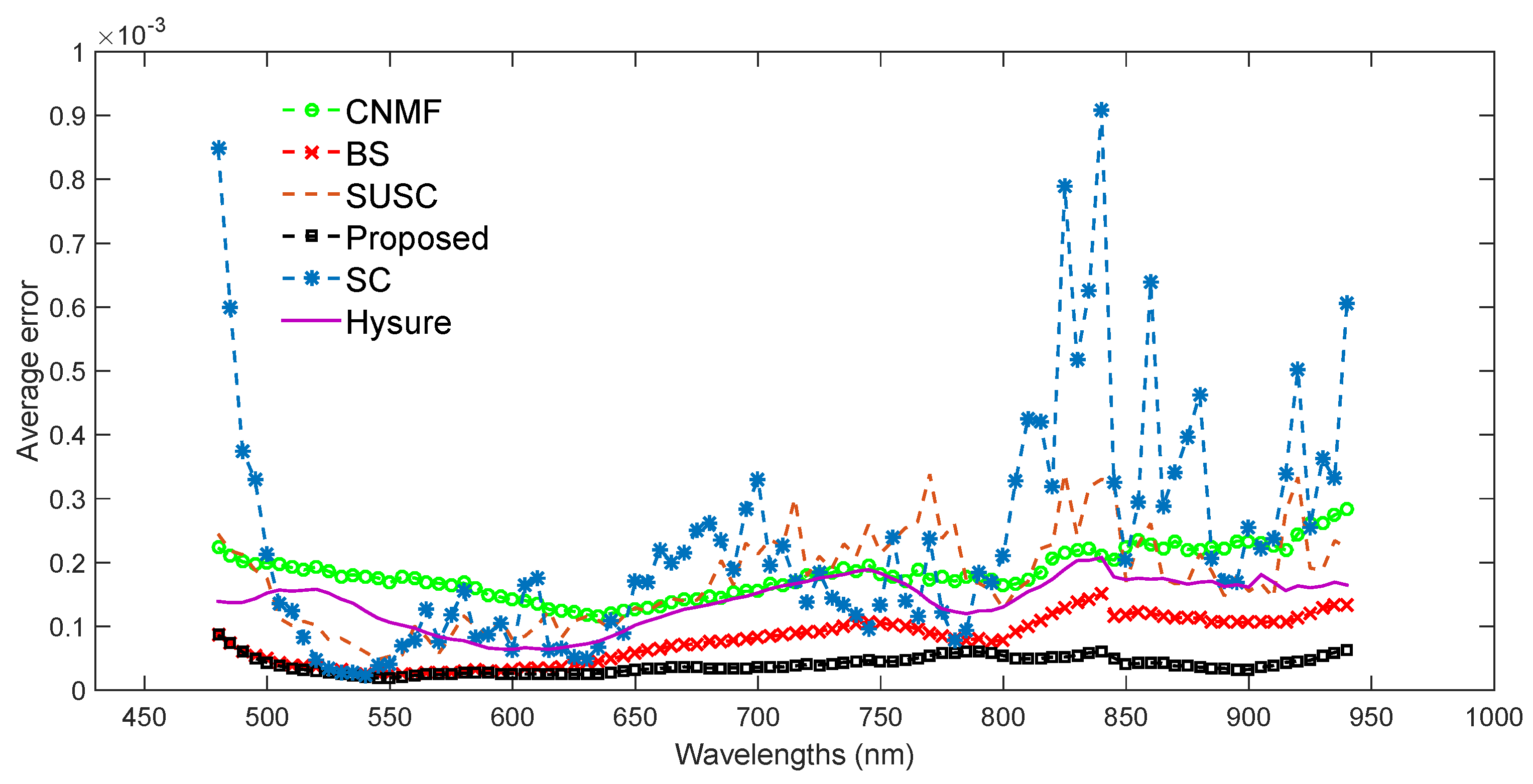
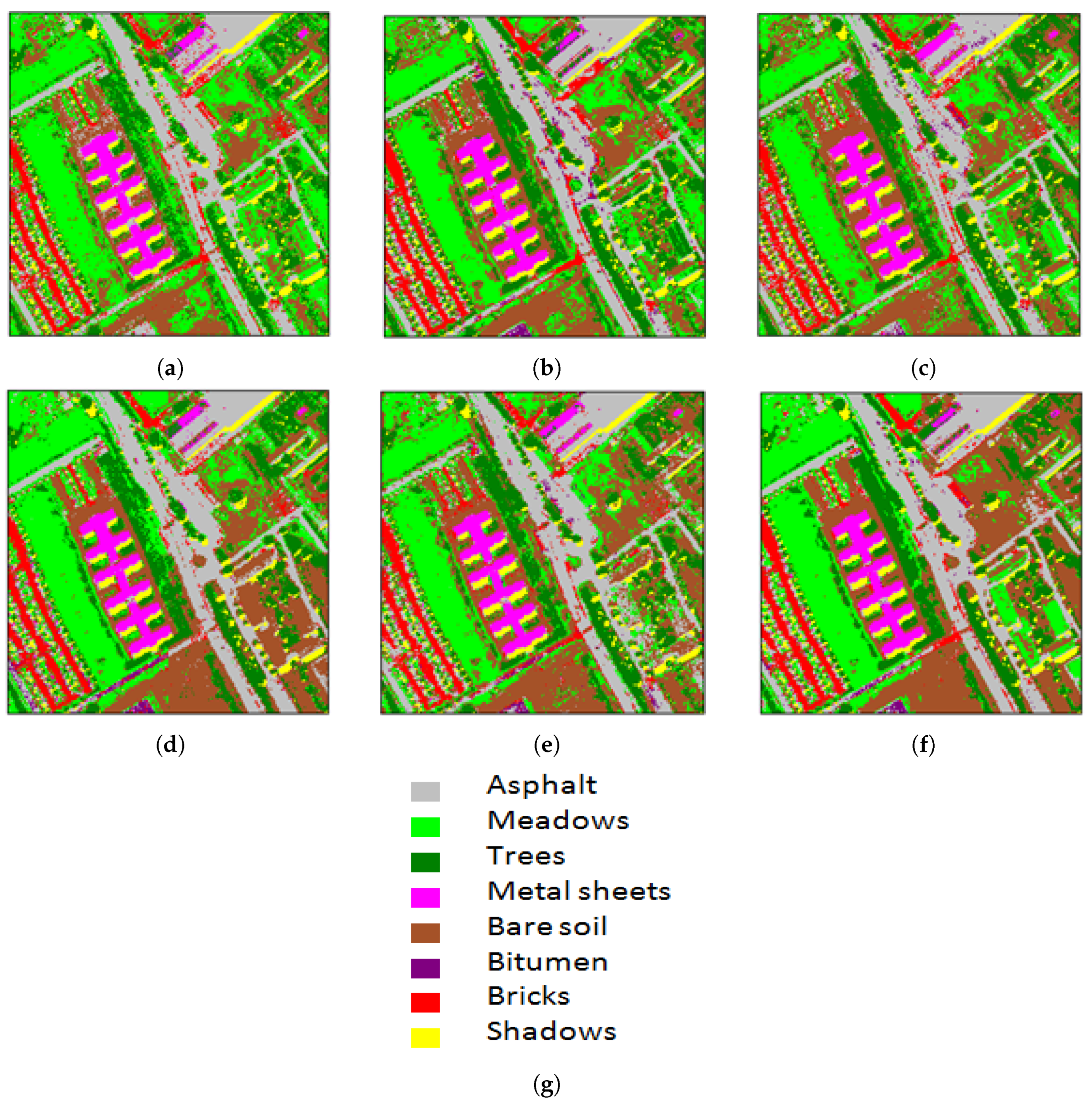
3.4. Results on Pavia Dataset
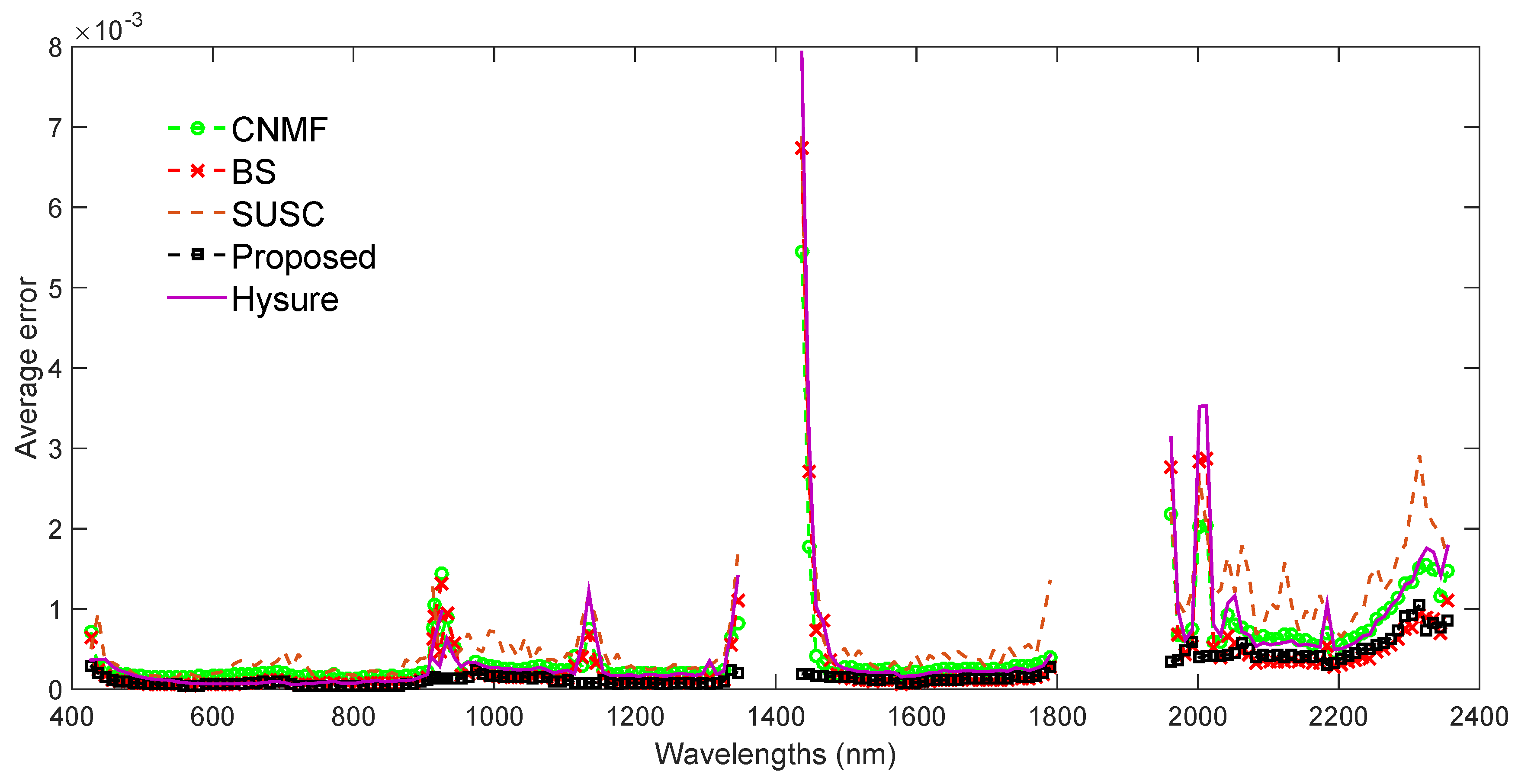
3.5. Results on Shiraz Dataset
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Akgun, T.; Altunbasak, Y.; Mersereau, R.M. Super-resolution reconstruction of hyperspectral images. IEEE Trans. Image Process 2005, 14, 1860–1875. [Google Scholar] [CrossRef] [PubMed]
- Charles, A.S.; Rozell, C.J. Spectral superresolution of hyperspectral imagery using reweighted l1 spatial filtering. IEEE Geosci. Remote Sens. Lett. 2014, 11, 602–606. [Google Scholar] [CrossRef]
- Zhao, Y.; Yang, J.; Chan, J.C.W. Hyperspectral imagery superresolution by spatial-spectral joint nonlocal similarity. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 963–978. [Google Scholar] [CrossRef]
- Bendoumi, M.A.; He, M.; Mei, S. Hyperspectral image resolution enhancement using high-resolution multispectral image based on spectral unmixing. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6574–6583. [Google Scholar] [CrossRef]
- Yokoya, N.; Yairi, T.; Iwasaki, A. Coupled nonnegative matrix factorization unmixing for hyperspectral and multispectral data fusion. IEEE Trans. Geosci. Remote Sens. 2012, 50, 528–537. [Google Scholar] [CrossRef]
- Nascimento, J.M.; Bioucas Dias, J.M. Vertex component analysis: A fast algorithm to unmix hyperspectral data. IEEE Trans. Geosci. Remote Sens. 2005, 43, 898–910. [Google Scholar] [CrossRef]
- Simoes, M.; Bioucas-Dias, J.; Almeida, L.; Chanussot, J. A convex formulation for hyperspectral image superresolution via subspace-based regularization. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3373–3388. [Google Scholar] [CrossRef]
- Wei, Q.; Bioucas-Dias, J.; Dobigeon, N.; Tourneret, J.Y.; Chen, M.; Godsill, M. Multi-band image fusion based on spectral unmixing. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7236–7249. [Google Scholar] [CrossRef]
- Sun, X.; Zhang, L.; Yang, H.; Wu, T.; Cen, Y.; Guo, Y. Enhancement of Spectral Resolution for Remotely Sensed Multispectral Image. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 2198–2211. [Google Scholar] [CrossRef]
- Guerra, R.; López, S.; Sarmiento, R. A Computationally Efficient Algorithm for Fusing Multispectral and Hyperspectral Images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1–17. [Google Scholar] [CrossRef]
- Bieniarz, J.; Müller, R.; Zhu, X.X.; Reinartz, P. Hyperspectral image resolution enhancement based on joint sparsity spectral unmixing. In Proceedings of the IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 2645–2648. [Google Scholar]
- Zhu, X.; Bamler, R. A sparse image fusion algorithm with application to pansharpening. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2827–2836. [Google Scholar] [CrossRef]
- Akhtar, N.; Shafait, F.; Mian, A. Sparse Spatio-Spectral Representation for Hyperspectral Image Super-Resolution; Springer International Publishing: Cham, Switzerland, 2014; Volume 8695, pp. 63–78. [Google Scholar]
- Huang, B.; Song, H.; Cui, H.; Peng, J.; Xu, Z. Spatial and spectral image fusion using sparse matrix factorization. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1693–1704. [Google Scholar] [CrossRef]
- Wei, Q.; Bioucas-Dias, J.; Dobigeon, N.; Tourneret, J.Y. Hyperspectral and multispectral image fusion based on a sparse representation. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3658–3668. [Google Scholar] [CrossRef]
- Yokoya, N.; Grohnfeldt, C.; Chanussot, J. Hyperspectral and Multispectral Data Fusion: A Comparative Review. IEEE Geosci. Remote Sens. Mag. 2017, 1–25. [Google Scholar]
- Nezhad, Z.H.; Karami, A.; Heylen, R.; Scheunders, P. Fusion of hyperspectral and multispectral images using spectral unmixing and sparse coding. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 2377–2389. [Google Scholar] [CrossRef]
- Licciardi, G.; Veganzones, M.A.; Simoes, M.; Bioucas-Dias, J.M.; Chanussot, J. Super-resolution of hyperspectral images using local spectral unmixing. In Proceedings of the IEEE Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS 2014), Lausanne, Switzerland, 25–27 June 2014; pp. 1–4. [Google Scholar]
- Loncan, L.; Almeida, L.B.; Bioucas-Dias, J.M.; Briottet, X.; Chanussot, J.; Dobigeon, N.; Fabre, S.; Liao, W.; Licciardi, G.A.; Simoes, M.; et al. Hyperspectral pansharpening: A review. IEEE Trans. Geosci. Remote Sens. 2015, 3, 27–46. [Google Scholar] [CrossRef]
- Aiazzi, B.; Alparone, L.; Baronti, S.; Garzelli, A.; Selva, M. MTFtailored multiscale fusion of high-resolution MS and Pan imagery. Photogramm. Eng. Remote Sens. 2006, 72, 591–596. [Google Scholar] [CrossRef]
- Vivone, G.; Restaino, R.; Dalla Mura, M.; Licciardi, G.; Chanussot, J. Contrast and error-based fusion schemes for multispectral image pansharpening. IEEE Geosci. Remote Sens. Lett. 2014, 11, 930–934. [Google Scholar] [CrossRef]
- Liao, W.; Huang, X.; Coillie, F.; Gautama, S.; Pizurica, A.; Philips, W.; Liu, H.; Zhu, T.; Shimoni, M.; Moser, G.; et al. Processing of multiresolution thermal hyperspectral and digital color data: Outcome of the 2014 IEEE grss data fusion contest. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 2984–2996. [Google Scholar] [CrossRef]
- Heylen, R.; Scheunders, P. Fully constrained least-squares spectral unmixing by simplex projection. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4112–4122. [Google Scholar] [CrossRef]
- Aharon, M.; Elad, M.; Bruckstein, A. The k-svd: An algorithm for designing overcomplete dictionaries for sparse representation. IEEE Trans. Signal Process. 2006, 54, 4311–4322. [Google Scholar] [CrossRef]
- Mairal, J.; Bach, F.; Ponce, J.; Sapiro, G. Online dictionary learning for sparse coding. In Proceedings of the 26th Annual International Conference on Machine Learning, Montreal, QC, Canada, 14–18 June 2009; pp. 689–696. [Google Scholar]
- Tropp, J.; Gilbert, A. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Afonso, M.; Bioucas-Dias, J.; Figueiredo, M. An augmented lagrangian approach to the constrained optimization formulation of imaging inverse problems. IEEE Trans. Image Process. 2011, 20, 681–695. [Google Scholar] [CrossRef] [PubMed]
- Afonso, M.V.; Bioucas-Dias, J.M.; Figueiredo, M.A. Fast image recovery using variable splitting and constrained optimization. IEEE Trans. Image Process. 2010, 19, 2345–2356. [Google Scholar] [CrossRef] [PubMed]
- Veganzones, M.A.; Simões, M.; Licciardi, G.; Yokoya, N.; Bioucas-Dias, J.M.; Chanussot, J. Hyperspectral super-resolution of locally low rank images from complementary multisource data. IEEE Trans. Image Process. 2016, 25, 274–288. [Google Scholar] [CrossRef] [PubMed]
- Bioucas-Dias, J.M.; Nascimento, J.M.P. Hyperspectral subspace identification. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2435–2445. [Google Scholar] [CrossRef]
- Inglada, J.; Giros, A. On the possibility of automatic multisensor image registration. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2104–2120. [Google Scholar] [CrossRef]
- Reinartz, P.; Müller, R.; Schwind, P.; Suri, S.; Bamler, R. Orthorectification of VHR optical satellite data exploiting the geometric accuracy of TerraSAR-X data. ISPRS J. Photogram. Remote Sens. 2011, 66, 124–132. [Google Scholar] [CrossRef]
- Gruen, A.; Baltsavias, E. Geometrically constrained multiphoto matching. Photogram. Eng. Remote Sens. 1988, 54, 633–641. [Google Scholar]
- Soukal, P.; Baltsavias, E. Image matching error detection with focus on matching of SAR and optical images. In Proceedings of the 33rd Asian Conference on Remote Sensing, Pattaya, Thailand, 26–30 November 2012; pp. 1436–1442. [Google Scholar]
- Karami, A.; Heylen, R.; Scheunders, P. Band-specific shearlet-based hyperspectral image noise reduction. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5054–5066. [Google Scholar] [CrossRef]
- Wald, L. Quality of high resolution synthesised images: Is there a simple criterion. In Proceedings of the Third Conference “Fusion of Earth Data: Merging Point Measurements, Raster Maps and Remotely Sensed Images”, Sophia Antipolis, France, 26–28 January 2000; pp. 99–103. [Google Scholar]
- Chang, C.C.; Lin, C.J. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 27:1–27:27. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance of Different Fusion Methods | ||||||
|---|---|---|---|---|---|---|
| Method | SNR | UIQI | SAM | ERGAS | DD | Time (s) |
| Coupled Non-Negative Matrix Factorization [5] | 25.92 | 0.98 | 2.196 | 1.363 | 0.011 | 7.35 |
| Sparse Coding [13] | 22.95 | 0.97 | 3.153 | 1.861 | 0.013 | 361.1 |
| Bayesian Sparse [15] | 29.32 | 0.99 | 1.522 | 0.882 | 0.007 | 73.38 |
| Spectral UnmixingSpare Coding [17] | 25.81 | 0.981 | 2.533 | 1.352 | 0.011 | 301.1 |
| Hysure [7] | 26.47 | 0.982 | 2.114 | 1.234 | 0.01 | 64.75 |
| Proposed (QuickBird) | 30.57 | 0.993 | 1.301 | 0.782 | 0.004 | 40.21 |
| Proposed (Multispectral Image) | 30.59 | 0.993 | 1.302 | 0.781 | 0.006 | 40.71 |
| Proposed (QuickBird + Multispectral Image) | 30.87 | 0.993 | 1.246 | 0.753 | 0.006 | 40.98 |
| Proposed (Synthetic Aperture Radar) | 30.58 | 0.993 | 1.298 | 0.781 | 0.006 | 40.55 |
| Proposed (Multispectral Image+Synthetic Aperture Radar) | 30.63 | 0.993 | 1.286 | 0.773 | 0.006 | 41.85 |
| Proposed (ALI) | 30.79 | 0.993 | 1.258 | 0.761 | 0.006 | 41.70 |
| Proposed (IKONOS) | 30.76 | 0.993 | 1.261 | 0.762 | 0.006 | 42.15 |
| Proposed (IKONOS+ALI) | 30.85 | 0.993 | 1.257 | 0.754 | 0.006 | 38.8 |
| Method | Min | Max | Average | Wavelength (Min Error) | Wavelength (Max Error) |
|---|---|---|---|---|---|
| CNMF [5] | 635 (band 42) | 940 (band 103) | |||
| SC [13] | 540 (band 23) | 840 (band 83) | |||
| BS [15] | 545 (band 24) | 840 (band 83) | |||
| SUSC [17] | 545 (band 24) | 825 (band 80) | |||
| Hysure [7] | 600 (band 35) | 840 (band 83) | |||
| Proposed method (SUBS) | 545 (band 24) | 480 (band 11) |
| Name of (Classes) | No. of Samples (Train-Test) | CNMF [5] | SC [13] | BS [15] | SUSC [17] | Hysure [7] | Proposed (SUBS) |
|---|---|---|---|---|---|---|---|
| Asphalt | 180–1612 | 92.49 | 98.34 | 93.18 | 98.60 | 96.28 | 98.34 |
| Meadows | 328–2944 | 83.22 | 89.17 | 90.22 | 97.23 | 96.64 | 98.95 |
| Trees | 69–618 | 90.91 | 98.98 | 93.15 | 95.79 | 97.89 | 98.49 |
| Painted metal sheets | 135–1210 | 100.00 | 100.00 | 99.67 | 99.83 | 99.92 | 100 |
| Bare Soil | 155–1390 | 89.94 | 90.72 | 87.84 | 97.97 | 90.67 | 98.35 |
| Bitumen | 10–86 | 0 | 89.41 | 68.00 | 69.81 | 91.67 | 94.87 |
| Self-Blocking Bricks | 112–1004 | 94.14 | 98.70 | 95.56 | 96.82 | 96.36 | 98.40 |
| Shadows | 22–193 | 100 | 100 | 100 | 100 | 100 | 100 |
| Overall Accuracy (%) | 89.96 | 94.38 | 92.58 | 97.53 | 96.16 | 98.79 | |
| Kappa | 0.8734 | 0.9296 | 0.9072 | 0.9692 | 0.9521 | 0.9849 |
| Performance of Different Fusion Methods | ||||||
|---|---|---|---|---|---|---|
| Method | SNR | UIQI | SAM | ERGAS | DD | Time (s) |
| Coupled Non-Negative Matrix Factorization [5] | 25.67 | 0.9859 | 2.72 | 1.44 | 0.016 | 6.9 |
| Bayesian Sparse [15] | 27.04 | 0.991 | 2.598 | 1.245 | 0.013 | 64.9 |
| Spectral Unimixing Sparse Coding [17] | 23.95 | 0.98 | 3.443 | 1.766 | 0.02 | 320.14 |
| Hysure [7] | 25.45 | 0.988 | 2.849 | 1.493 | 0.015 | 35.13 |
| Proposed (QuickBird) | 29.41 | 0.993 | 1.825 | 0.934 | 0.01 | 100.8 |
| Proposed (Multi Spectral Image) | 29.39 | 0.993 | 1.83 | 0.937 | 0.01 | 99.8 |
| Proposed (QuickBird+Multi Spectral Image) | 29.42 | 0.993 | 1.823 | 0.933 | 0.01 | 100.5 |
| Proposed (Synthetic Aperture Radar) | 29.45 | 0.993 | 1.822 | 0.93 | 0.01 | 99.63 |
| Proposed (QuickBird + Synthetic Aperture Radar) | 29.46 | 0.993 | 1.819 | 0.929 | 0.01 | 103.3 |
| Proposed (ALI) | 29.41 | 0.993 | 1.826 | 0.933 | 0.01 | 102.3 |
| Proposed (IKONOS ) | 29.45 | 0.993 | 1.82 | 0.929 | f0.01 | 101 |
| Proposed (ALI + IKONOS) | 29.436 | 0.993 | 1.82 | 0.932 | 0.01 | 117 |
| Method | Min | Max | Average | Wavelength (Min Error) | Wavelength (Max Error) |
|---|---|---|---|---|---|
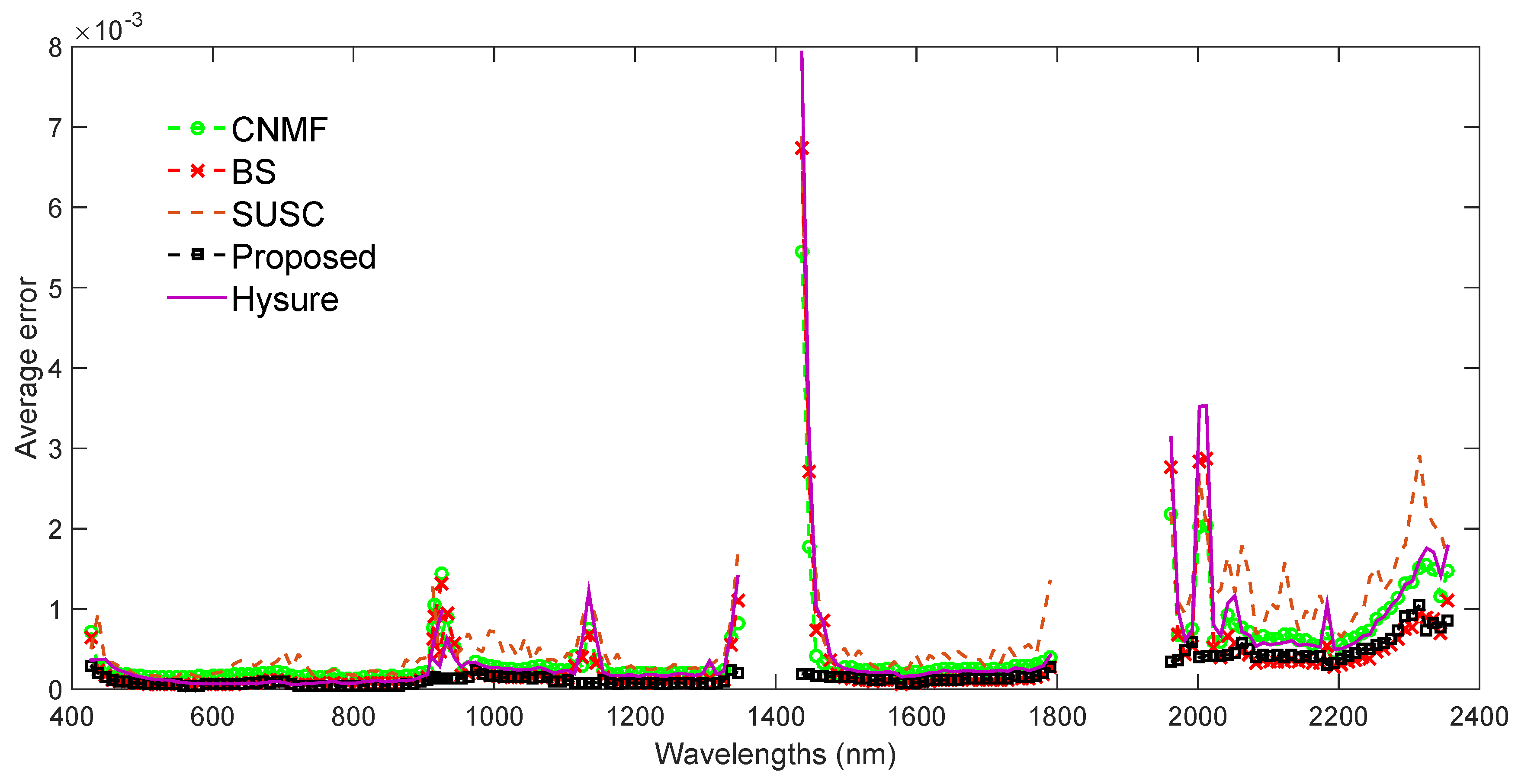
| CNMF [5] | 0.005 | 793.13 (band 44) | 1437.04 (band 129) | ||
| BS [15] | 0.007 | 569.27 (band 22) | 1437.04 (band 129) | ||
| SUSC [17] | 0.007 | 538.74 (band 19) | 1437.04 (band 129) | ||
| Hysure [7] | 0.008 | 721.9 (band 37) | 1437.04 (band 129) | ||
| Proposed method (SUBS) | 0.001 | 782.95 (band 43) | 2314.81 (band 216) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghasrodashti, E.K.; Karami, A.; Heylen, R.; Scheunders, P. Spatial Resolution Enhancement of Hyperspectral Images Using Spectral Unmixing and Bayesian Sparse Representation. Remote Sens. 2017, 9, 541. https://doi.org/10.3390/rs9060541
Ghasrodashti EK, Karami A, Heylen R, Scheunders P. Spatial Resolution Enhancement of Hyperspectral Images Using Spectral Unmixing and Bayesian Sparse Representation. Remote Sensing. 2017; 9(6):541. https://doi.org/10.3390/rs9060541
Chicago/Turabian StyleGhasrodashti, Elham Kordi, Azam Karami, Rob Heylen, and Paul Scheunders. 2017. "Spatial Resolution Enhancement of Hyperspectral Images Using Spectral Unmixing and Bayesian Sparse Representation" Remote Sensing 9, no. 6: 541. https://doi.org/10.3390/rs9060541
APA StyleGhasrodashti, E. K., Karami, A., Heylen, R., & Scheunders, P. (2017). Spatial Resolution Enhancement of Hyperspectral Images Using Spectral Unmixing and Bayesian Sparse Representation. Remote Sensing, 9(6), 541. https://doi.org/10.3390/rs9060541