
A Piezoelectric Energy Harvester with Bending–Torsion Vibration in Low-Speed Water


Abstract
:1. Introduction
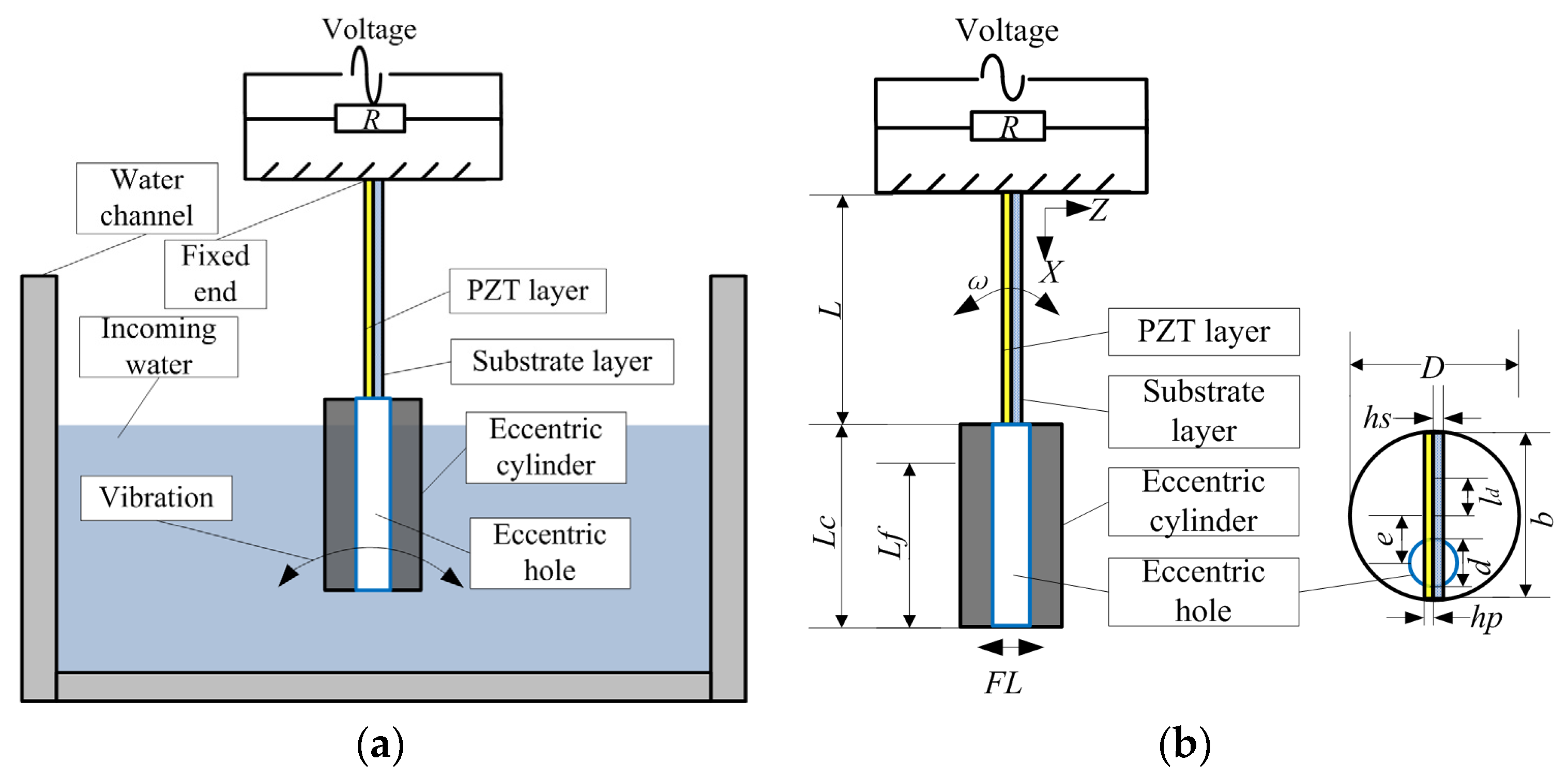
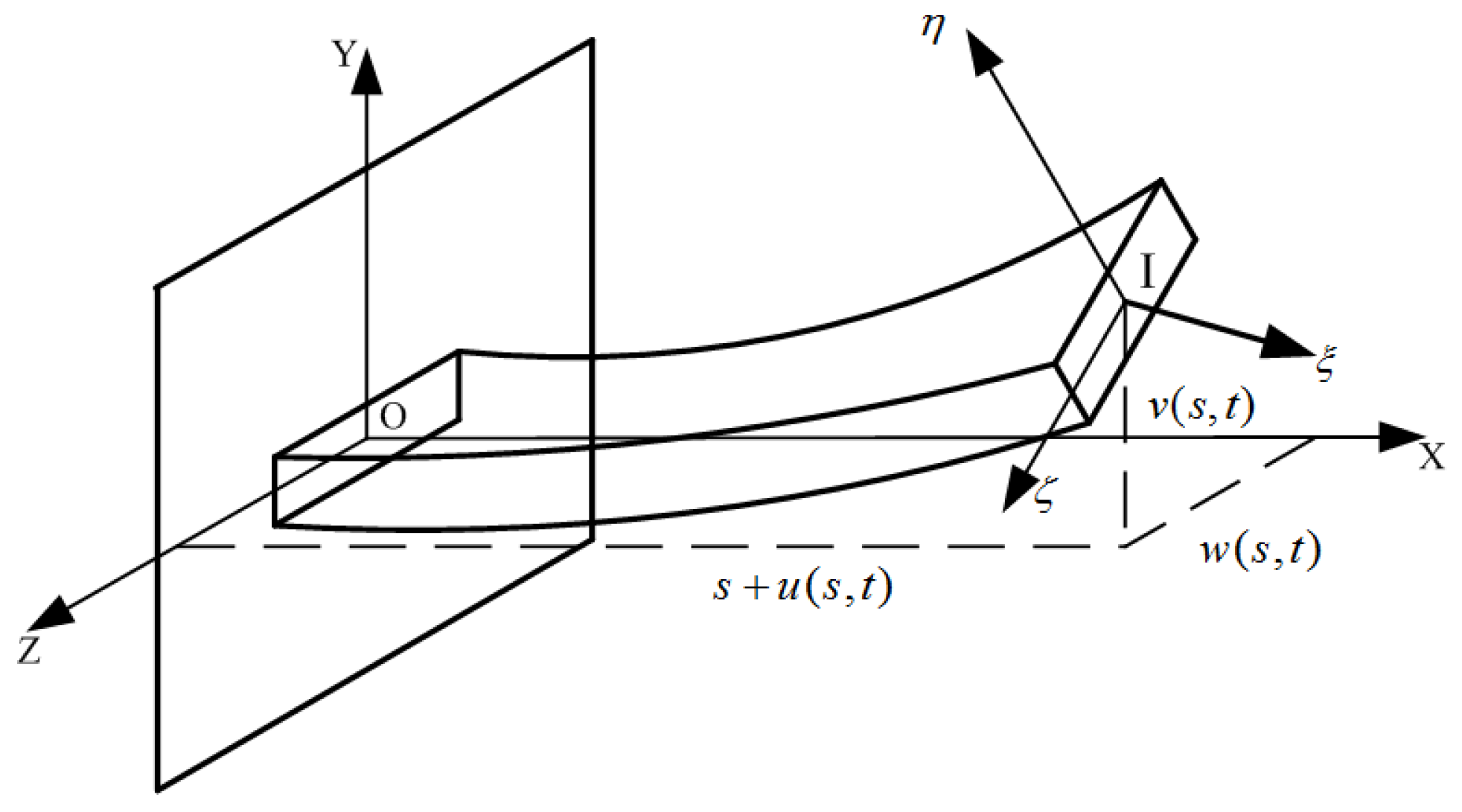
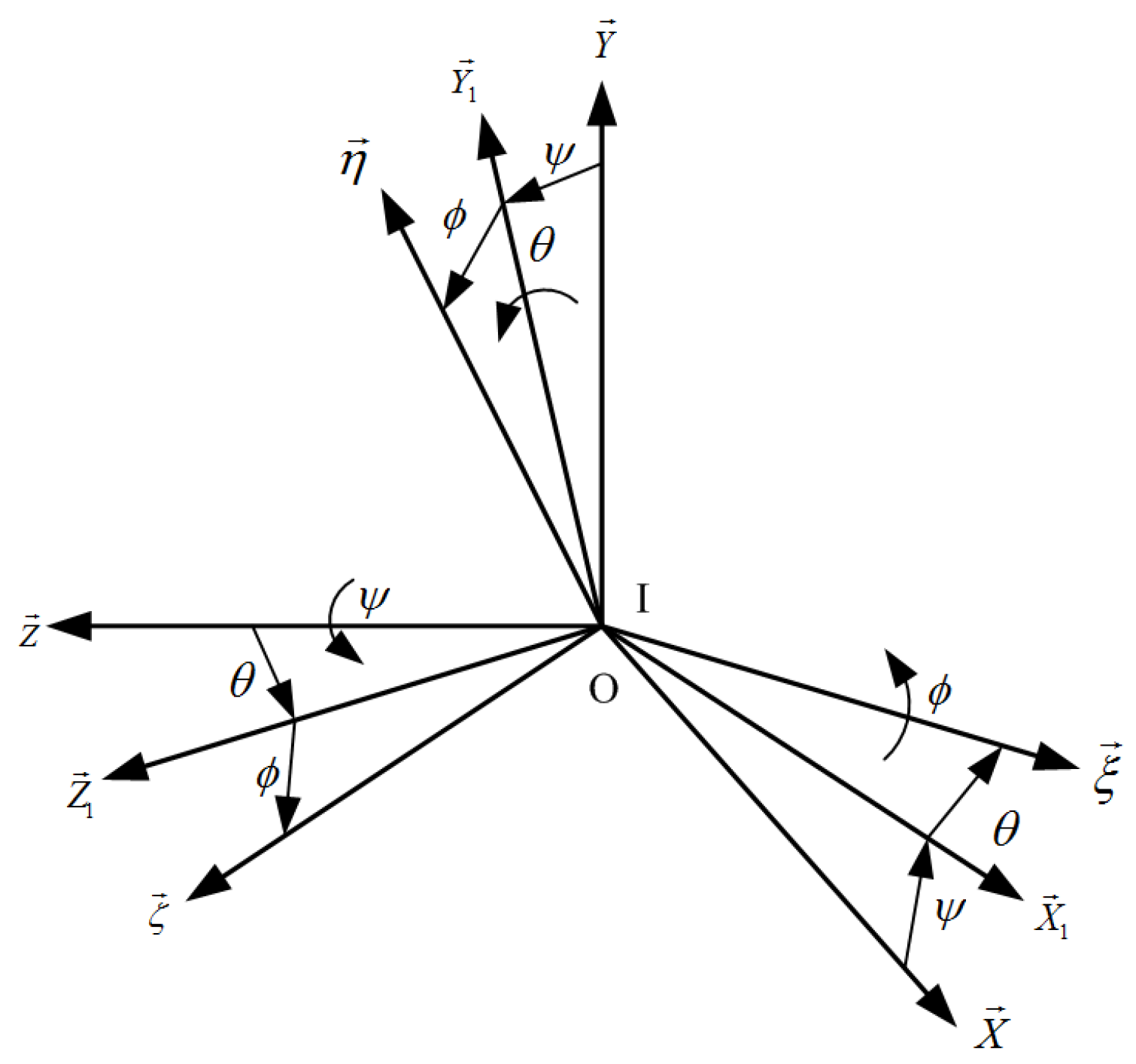
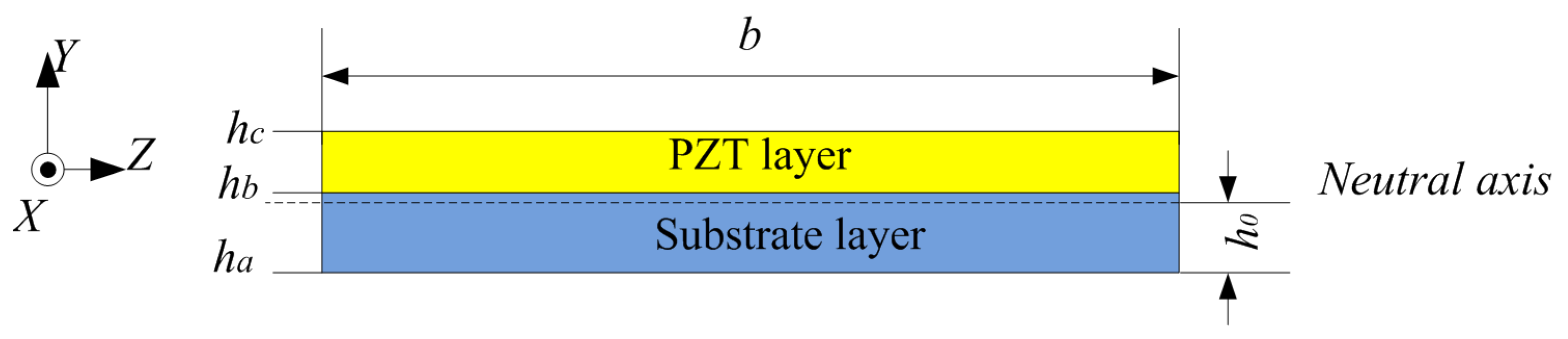
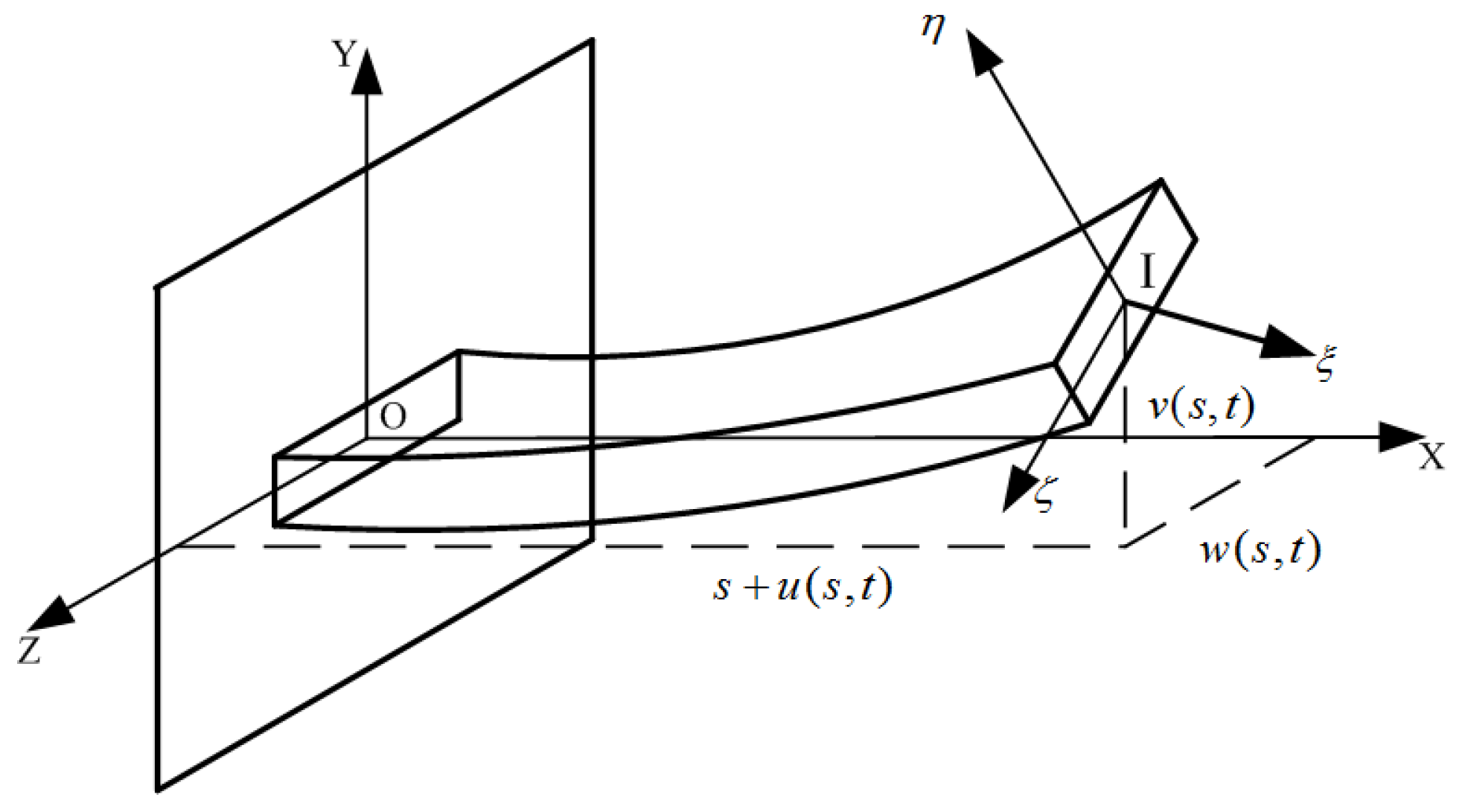
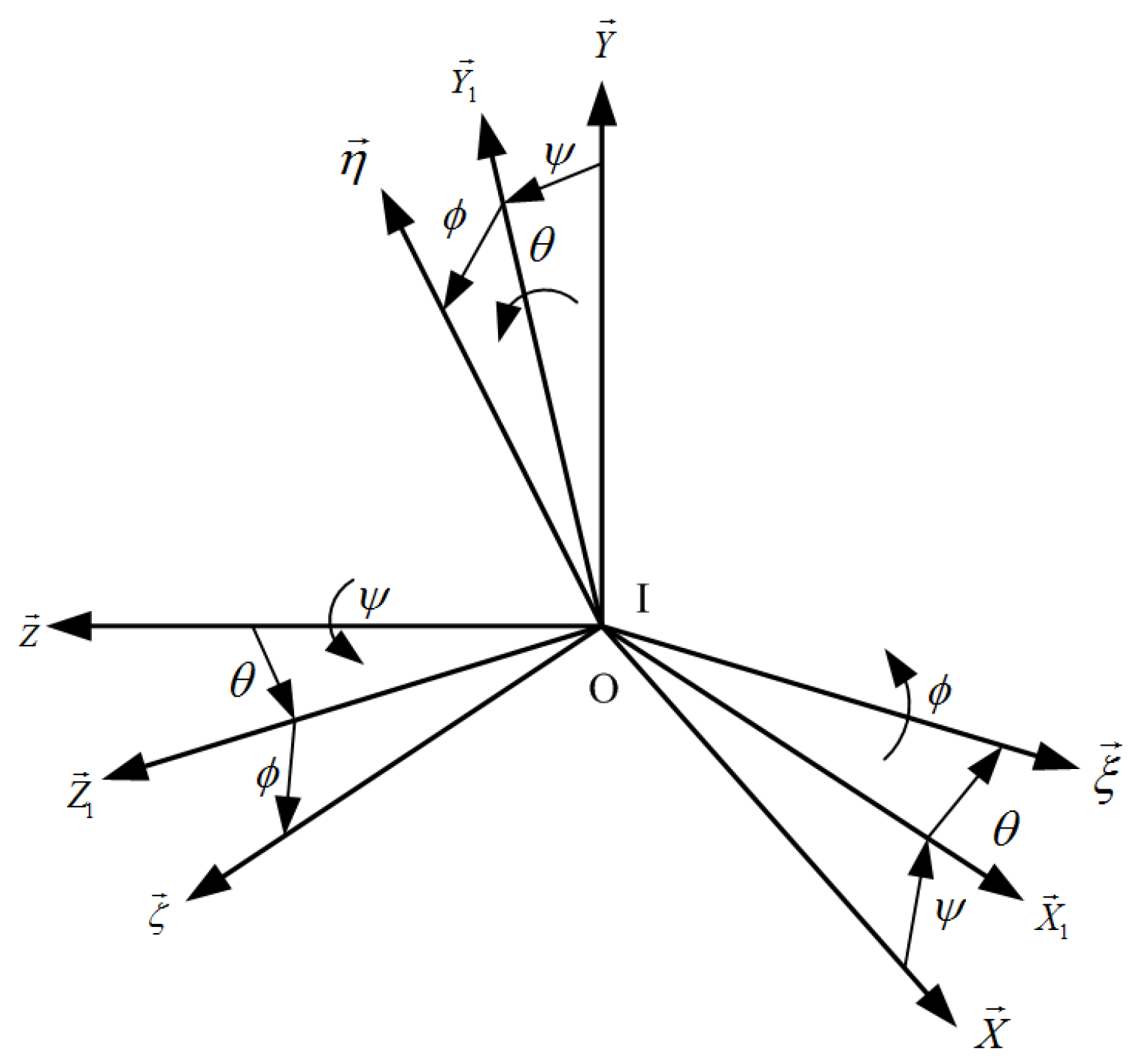
2. Modeling of the Harvester System
- (1)
- The piezoelectric beam is assumed to be inextensible.
- (2)
- The attachments of the tip cylinder, beam and fixed end are assumed to be rigid.
- (3)
- The beam is an Euler–Bernoulli beam.
3. Numerical Analysis and Experimental Validation
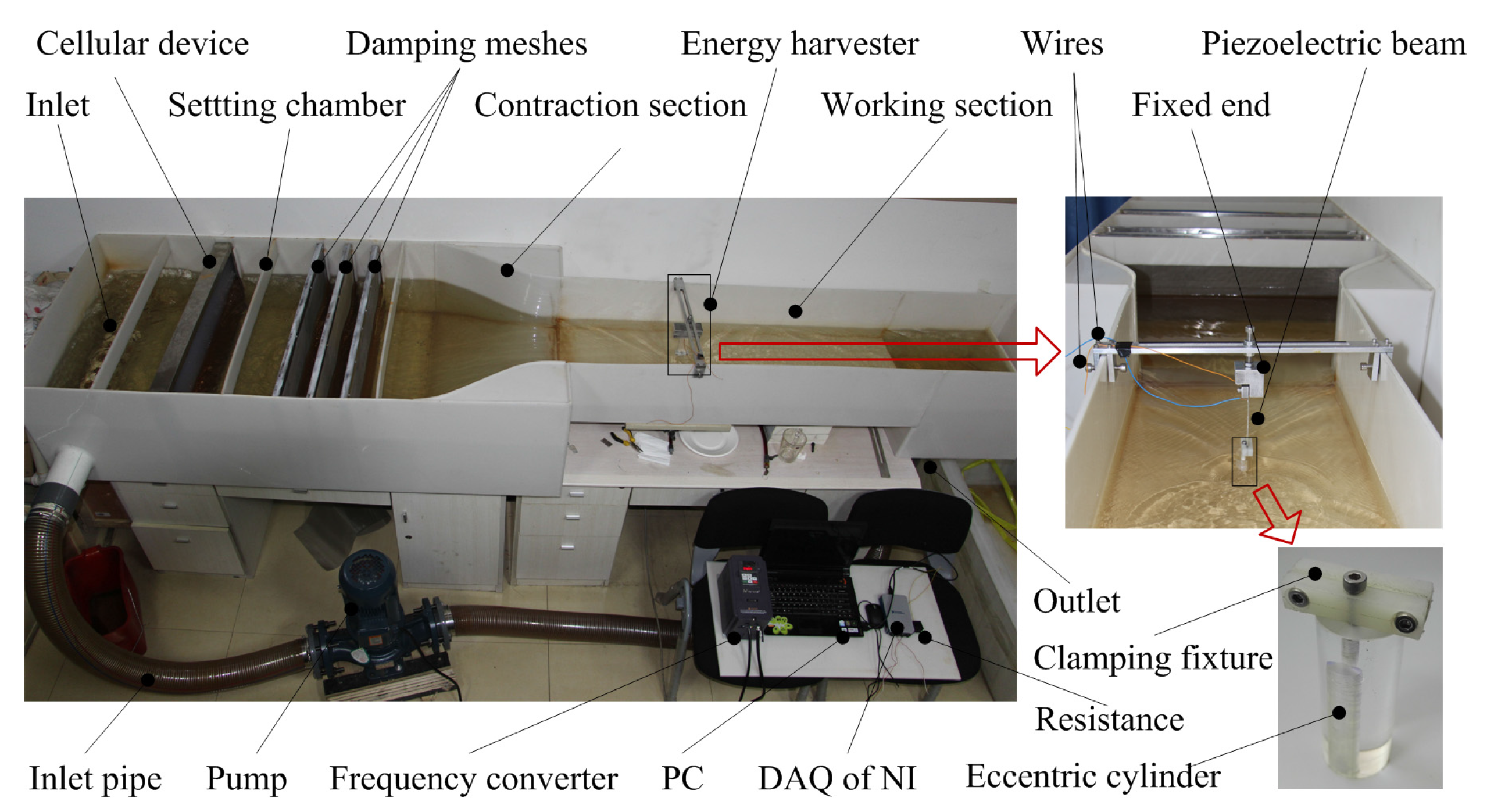
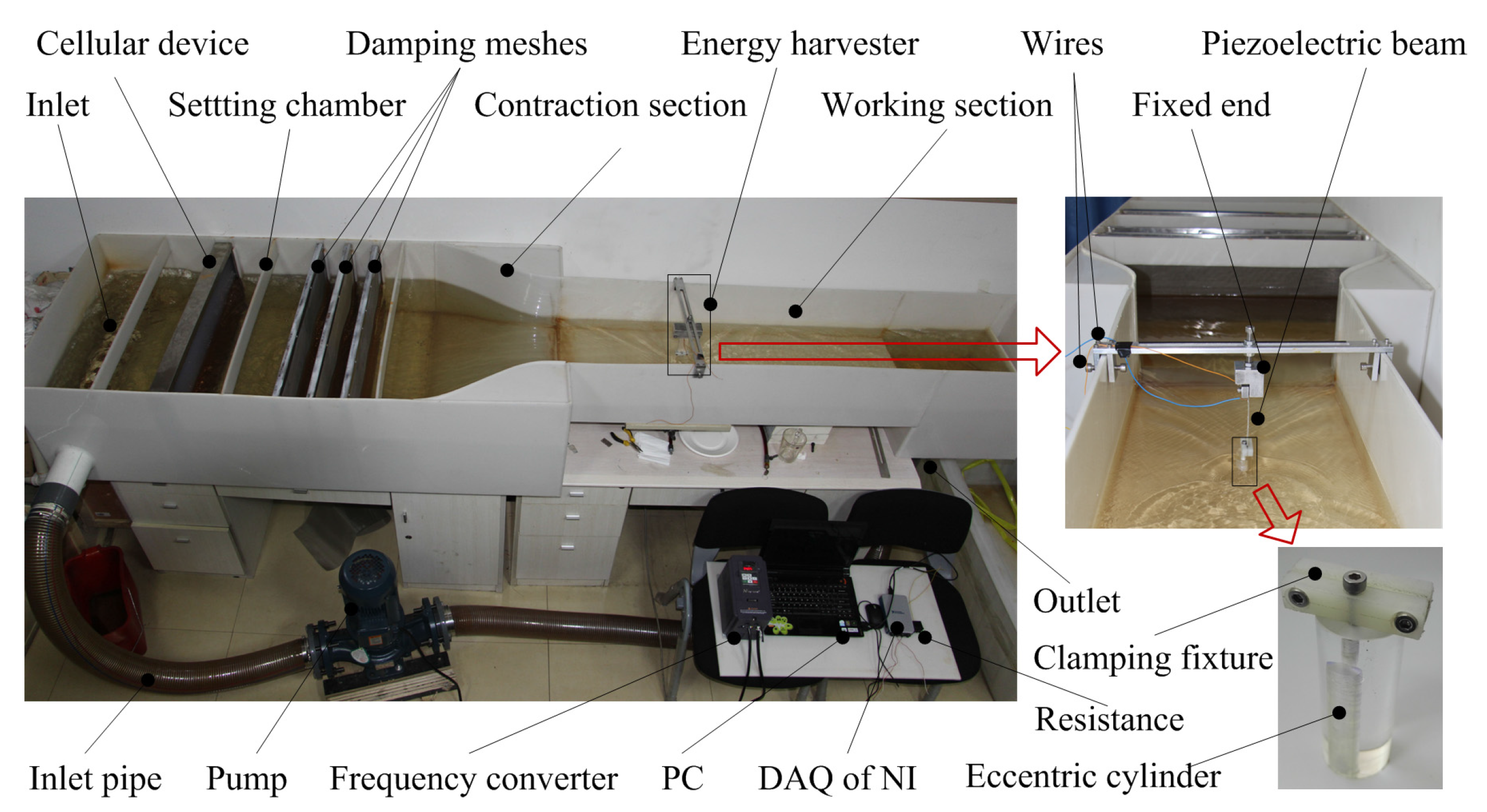
3.1. Experimental Setup
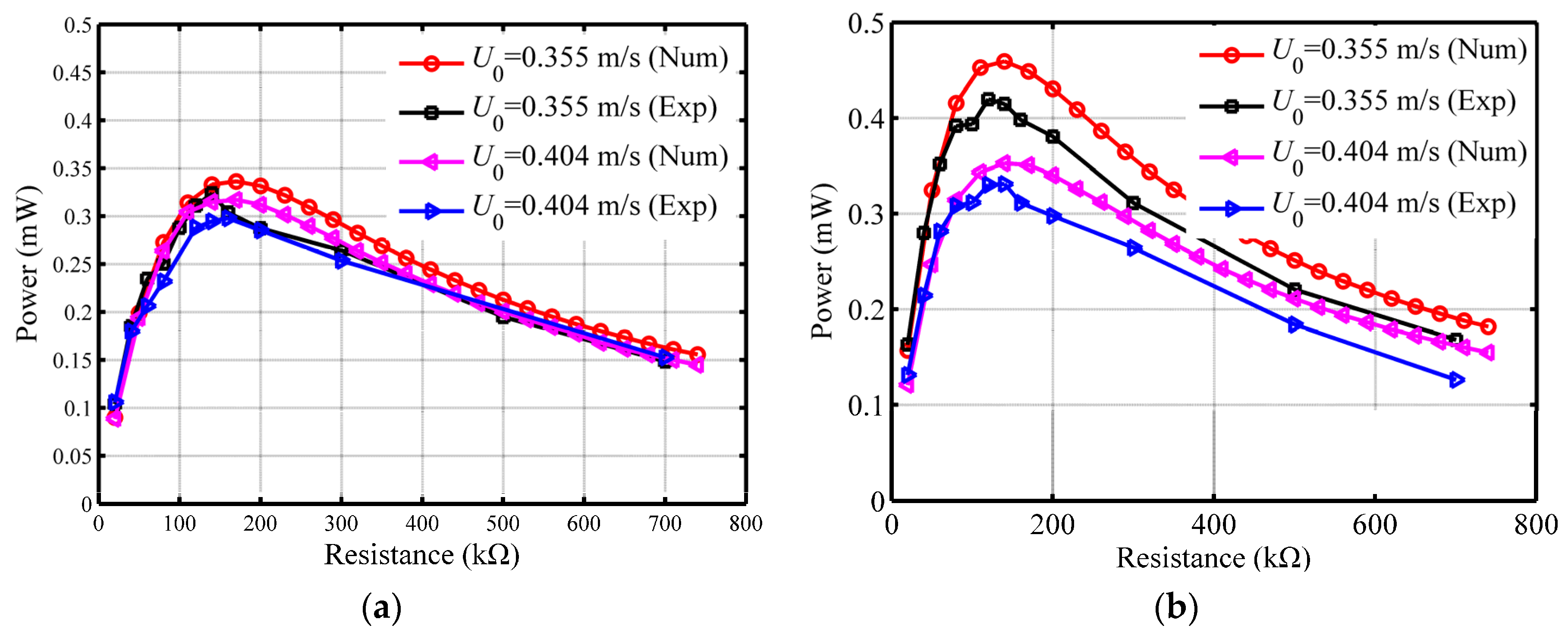
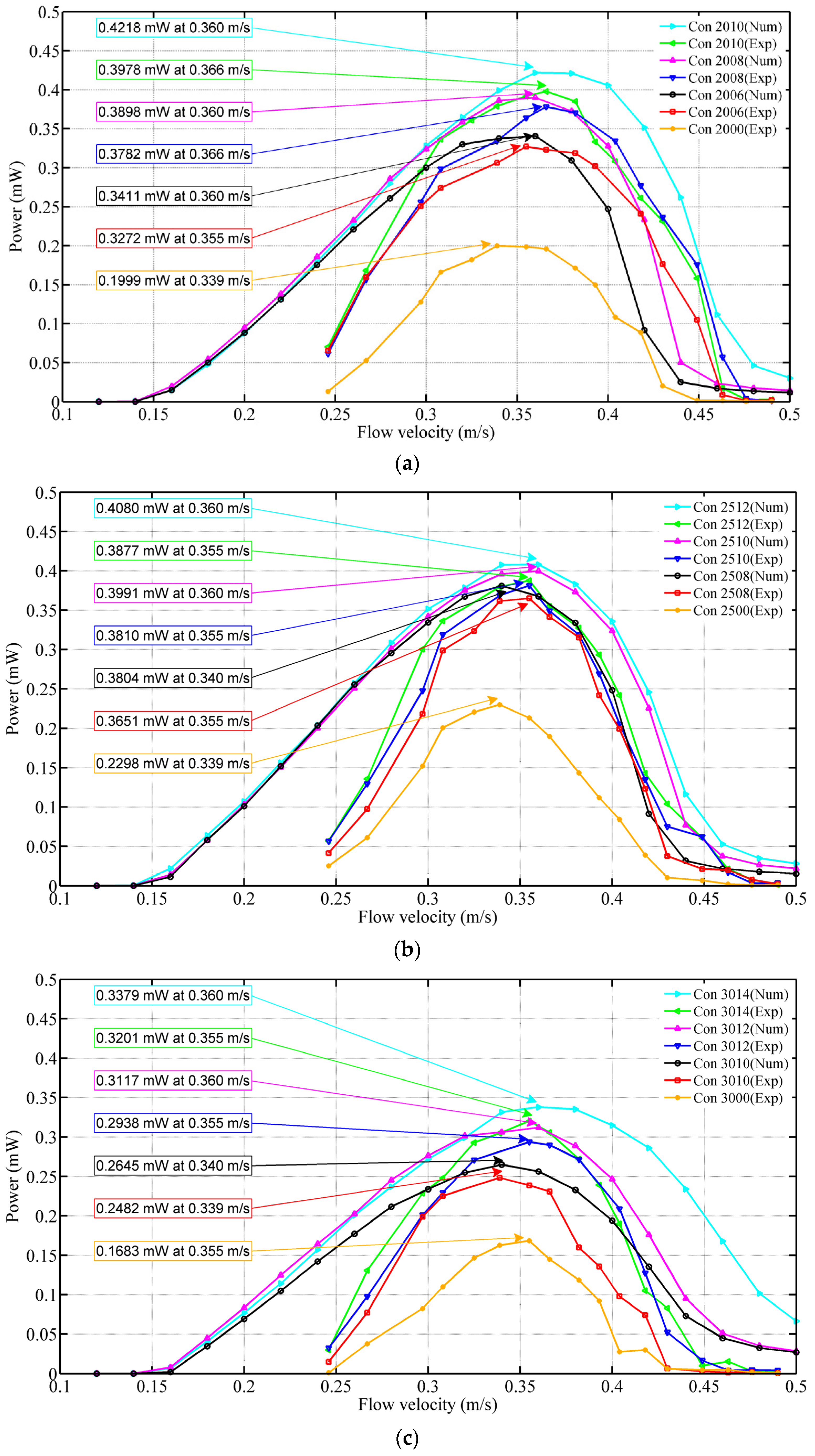
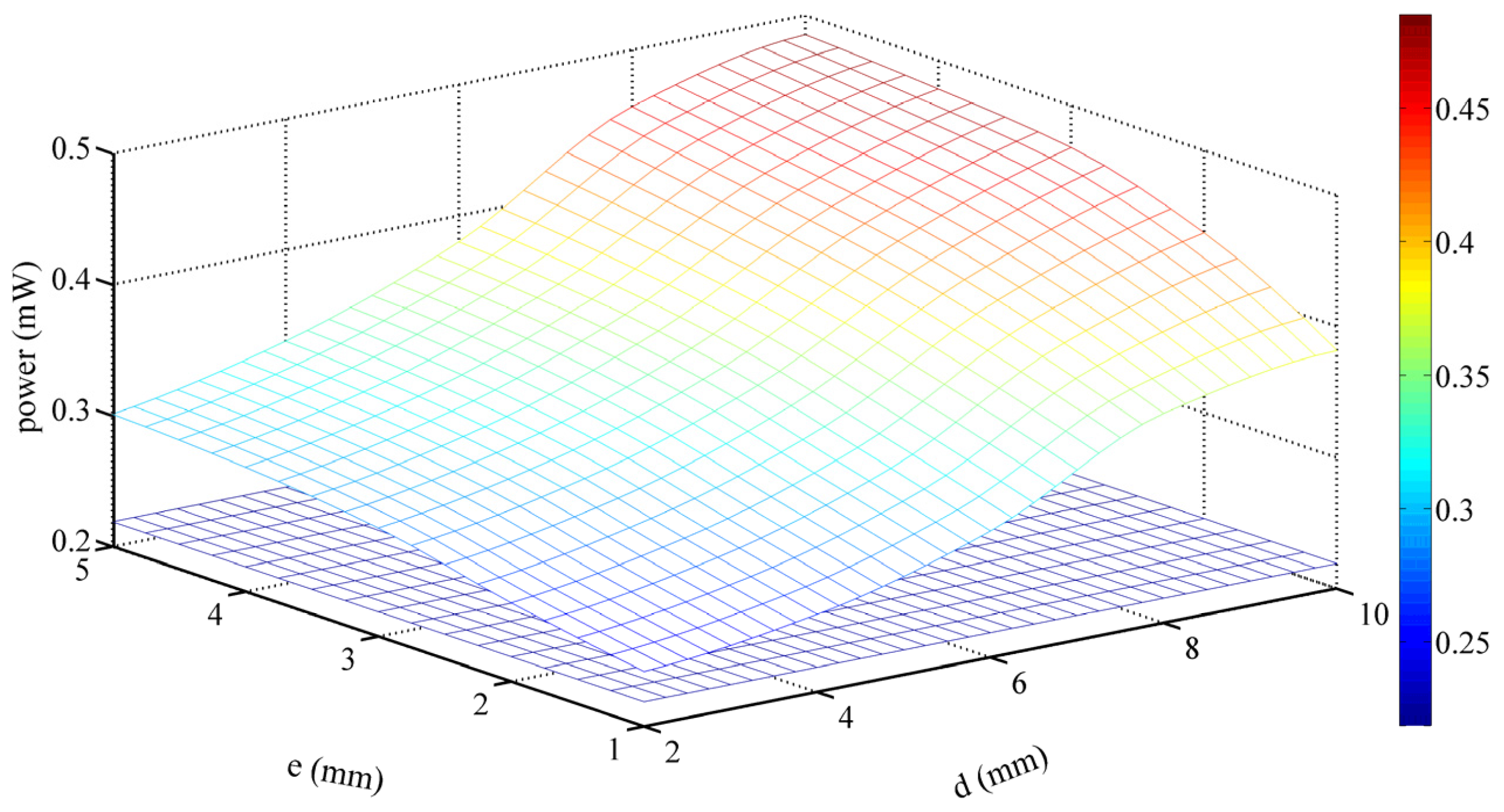
3.2. Numerical and Experimental Analysis
4. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Williams, C.B.; Yates, R.B. Analysis of a micro-electric generator for microsystems. Sens. Actuators A Phys. 1996, 52, 8–11. [Google Scholar] [CrossRef]
- Mitcheson, P.D.; Miao, P.; Stark, B.H.; Yeatman, E.M.; Holmes, A.S.; Green, T.C. Mems electrostatic micropower generator for low frequency operation. Sens. Actuators A Phys. 2004, 115, 523–529. [Google Scholar] [CrossRef]
- Erturk, A.; Inman, D.J. Issues in mathematical modeling of piezoelectric energy harvesters. Smart Mater. Struct. 2008, 17, 8479–8491. [Google Scholar] [CrossRef]
- Erturk, A.; Inman, D.J. A distributed parameter electromechanical model for cantilevered piezoelectric energy harvesters. J. Vib. Acoust. 2008, 130, 1257–1261. [Google Scholar] [CrossRef]
- Abdelkefi, A.; Najar, F.; Nayfeh, A.H.; Ayed, S.B. An energy harvester using piezoelectric cantilever beams undergoing coupled bending–torsion vibrations. Smart Mater. Struct. 2011, 20, 115007–115017. [Google Scholar] [CrossRef]
- Khameneifar, F.; Arzanpour, S.; Moallem, M. A piezoelectric energy harvester for rotary motion applications: Design and experiments. IEEE/ASME Trans. Mechatron. 2013, 18, 1527–1534. [Google Scholar] [CrossRef]
- Yang, Y.; Tang, L.; Li, H. Vibration energy harvesting using macro-fiber composites. Smart Mater. Struct. 2009, 18, 115025. [Google Scholar] [CrossRef]
- Kuna, M. Fracture mechanics of piezoelectric materials—Where are we right now? Eng. Fract. Mech. 2010, 77, 309–326. [Google Scholar] [CrossRef]
- Robbins, W.P.; Marusic, I.; Morris, D.; Novak, T.O. Wind-generated electrical energy using flexible piezoelectric mateials. In Proceedings of the ASME 2006 International Mechanical Engineering Congress and Exposition, Chicago, IL, USA, 5–10 November 2006; pp. 581–590.
- Akaydin, D.; Elvin, N.; Andreopoulos, Y. The performance of a self-excited fluidic energy harvester. Smart Mater. Struct. 2012, 21, 25007–25019. [Google Scholar] [CrossRef]
- Abdelkefi, A.; Hajj, M.R.; Nayfeh, A.H. Phenomena and modeling of piezoelectric energy harvesting from freely oscillating cylinders. Nonlinear Dyn. 2012, 70, 1377–1388. [Google Scholar] [CrossRef]
- Abdelkefi, A.; Yan, Z.; Hajj, M.R.; Yan, Z. Performance analysis of galloping-based piezoaeroelastic energy harvesters with different cross-section geometries. J. Intell. Mater. Syst. Struct. 2013, 25, 246–256. [Google Scholar] [CrossRef]
- Dai, H.L.; Abdelkefi, A.; Yang, Y.; Wang, L. Orientation of bluff body for designing efficient energy harvesters from vortex-induced vibrations. Appl. Phys. Lett. 2016, 108, 175–195. [Google Scholar] [CrossRef]
- Mehmood, A.; Abdelkefi, A.; Hajj, M.R.; Nayfeh, A.H.; Akhtar, I.; Nuhait, A.O. Piezoelectric energy harvesting from vortex-induced vibrations of circular cylinder. J. Sound Vib. 2013, 332, 4656–4667. [Google Scholar] [CrossRef]
- Dai, H.; Abdelkefi, A.; Wang, L. Theoretical modeling and nonlinear analysis of piezoelectric energy harvesting from vortex-induced vibrations. J. Intell. Mater. Syst. Struct. 2014, 25, 1861–1874. [Google Scholar] [CrossRef]
- Dai, H.L.; Abdelkefi, A.; Wang, L. Piezoelectric energy harvesting from concurrent vortex-induced vibrations and base excitations. Nonlinear Dyn. 2014, 77, 967–981. [Google Scholar] [CrossRef]
- Mackowski, A.W.; Williamson, C.H.K. An experimental investigation of vortex-induced vibration with nonlinear restoring forces. Phys. Fluids 2013, 25, 087101. [Google Scholar] [CrossRef]
- Dai, H.L.; Abdelkefi, A.; Wang, L. Vortex-induced vibrations mitigation through a nonlinear energy sink. Commun. Nonlinear Sci. Numer. Simul. 2016, 42, 22–36. [Google Scholar] [CrossRef]
- Dai, H.L.; Abdelkefi, A.; Wang, L. Modeling and nonlinear dynamics of fluid-conveying risers under hybrid excitations. Int. J. Eng. Sci. 2014, 81, 1–14. [Google Scholar] [CrossRef]
- Dai, H.L.; Abdelkefi, A.; Wang, L.; Liu, W.B. Time-delay feedback controller for amplitude reduction in vortex-induced vibrations. Nonlinear Dyn. 2015, 80, 59–70. [Google Scholar] [CrossRef]
- Violette, R.; De Langre, E.; Szydlowski, J. Computation of vortex-induced vibrations of long structures using a wake oscillator model: Comparison with dns and experiments. Comput. Struct. 2007, 85, 1134–1141. [Google Scholar] [CrossRef]
- Facchinetti, M.L.; de Langre, E.; Biolley, F. Coupling of structure and wake oscillators in vortex-induced vibrations. J. Fluids Struct. 2004, 19, 123–140. [Google Scholar] [CrossRef]
- Govardan, R. Modes of vortex formation and frequency response of a freely vibrating cylinder. J. Fluid Mech. 2000, 420, 85–130. [Google Scholar] [CrossRef]
- Goushcha, O.; Elvin, N.; Andreopoulos, Y. Interactions of vortices with a flexible beam with applications in fluidic energy harvesting. Appl. Phys. Lett. 2014, 104, 021919. [Google Scholar] [CrossRef]
- Abdelkefi, A. Aeroelastic energy harvesting: A review. Int. J. Eng. Sci. 2015, 100, 112–135. [Google Scholar] [CrossRef]
- Taylor, G.W.; Burns, J.R.; Kammann, S.A.; Powers, W.B.; Welsh, T.R. The energy harvesting eel: A small subsurface ocean/river power generator. IEEE J. Ocean. Eng. 2001, 26, 539–547. [Google Scholar] [CrossRef]
- Allen, J.J.; Smits, A.J. Energy harvesting eel. J. Fluids Struct. 2001, 15, 629–640. [Google Scholar] [CrossRef]
- Song, R.; Shan, X.; Lv, F.; Xie, T. A study of vortex-induced energy harvesting from water using pzt piezoelectric cantilever with cylindrical extension. Ceram. Int. 2015, 41, S768–S773. [Google Scholar] [CrossRef]
- Song, R.; Shan, X.; Lv, F.; Li, J.; Xie, T. A novel piezoelectric energy harvester using the macro fiber composite cantilever with a bicylinder in water. Appl. Sci. 2015, 5, 1942–1954. [Google Scholar] [CrossRef]
- Shan, X.; Song, R.; Fan, M.; Xie, T. Energy-harvesting performances of two tandem piezoelectric energy harvesters with cylinders in water. Appl. Sci. 2016, 6, 230. [Google Scholar] [CrossRef]
- Nayfeh, A.H. Introduction to Perturbation Techniques; Wiley-Interscience (John Wiley & Sons): New York, NY, USA, 2011; pp. 355–356. [Google Scholar]
- Blevins, R.D.; Saunders, H. Flow-Induced Vibration; Van Nostrand Reinhold Co.: New York, NY, USA; p. 6.
- Ayed, S.B.; Abdelkefi, A.; Najar, F.; Hajj, M.R. Design and performance of variable shaped piezoelectric energy harvesters. J. Intell. Mater. Syst. Struct. 2013, 25, 174–186. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ρp | Density of the piezoelectric layer (kg/m3) | 7800 |
| ρs | Density of the substrate layer (aluminum; kg/m3) | 2700 |
| ρf | Fluid density (kg/m3) | 1000 |
| ρc | Density of the cylinder (acrylic; kg/m3) | 1200 |
| Ep | Young modulus of the piezoelectric layer (Gpa) | 59.77 |
| Es | Young modulus of the substrate layer (Gpa) | 70 |
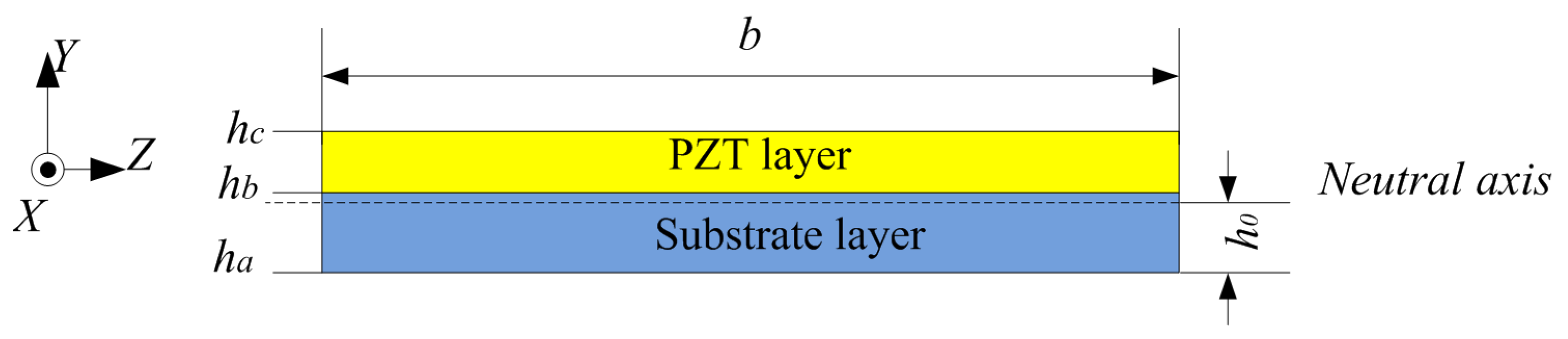
| L | Length of the beam (mm) | 85 |
| b | Width of the beam (mm) | 25 |
| hp | Thickness of the piezoelectric layer (mm) | 0.2 |
| hs | Thickness of the substrate layer (mm) | 0.2 |
| e31 | Piezoelectric constant (C/m2) | −16.6 |
| ε11 | Piezoelectric permittivity (nF/m) | 41.78 |
| Lc | Diameter of the cylinder (mm) | 75 |
| Lf | Length of the cylinder submerged in fluid (mm) | 60 |
| Configurations | 2006 | 2008 | 2010 | 2508 | 2510 | 2512 | 3010 | 3012 | 3014 |
|---|---|---|---|---|---|---|---|---|---|
| D (mm) | 20 | 20 | 20 | 25 | 25 | 25 | 30 | 30 | 30 |
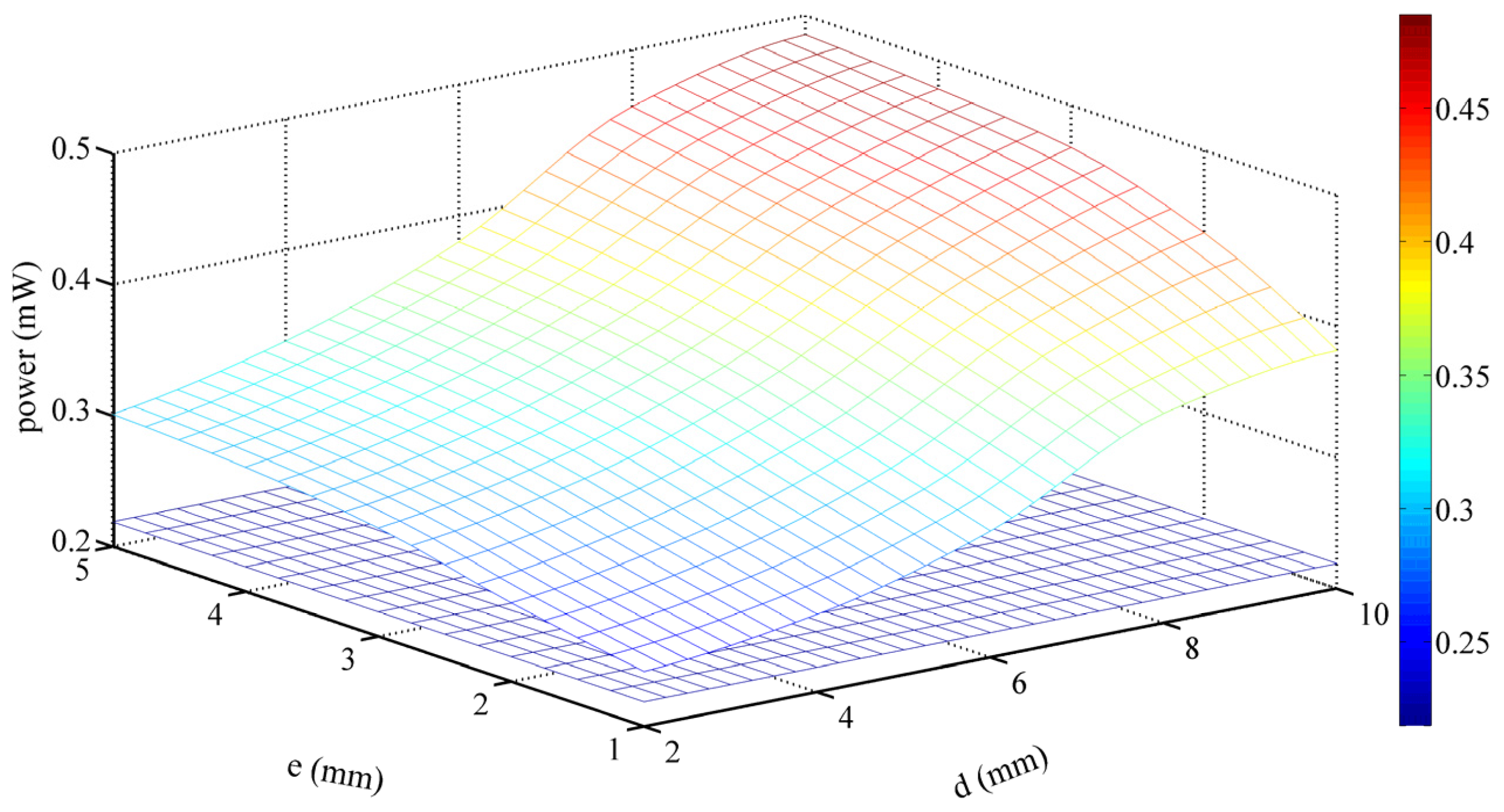
| d (mm) | 6 | 8 | 10 | 8 | 10 | 12 | 10 | 12 | 14 |
| e (mm) | 5 | 4 | 3 | 6.25 | 5 | 4 | 7.5 | 6 | 5 |
| ld (mm) | 0.495 | 0.762 | 0.952 | 0.713 | 0.925 | 1.198 | 0.938 | 1.142 | 1.392 |
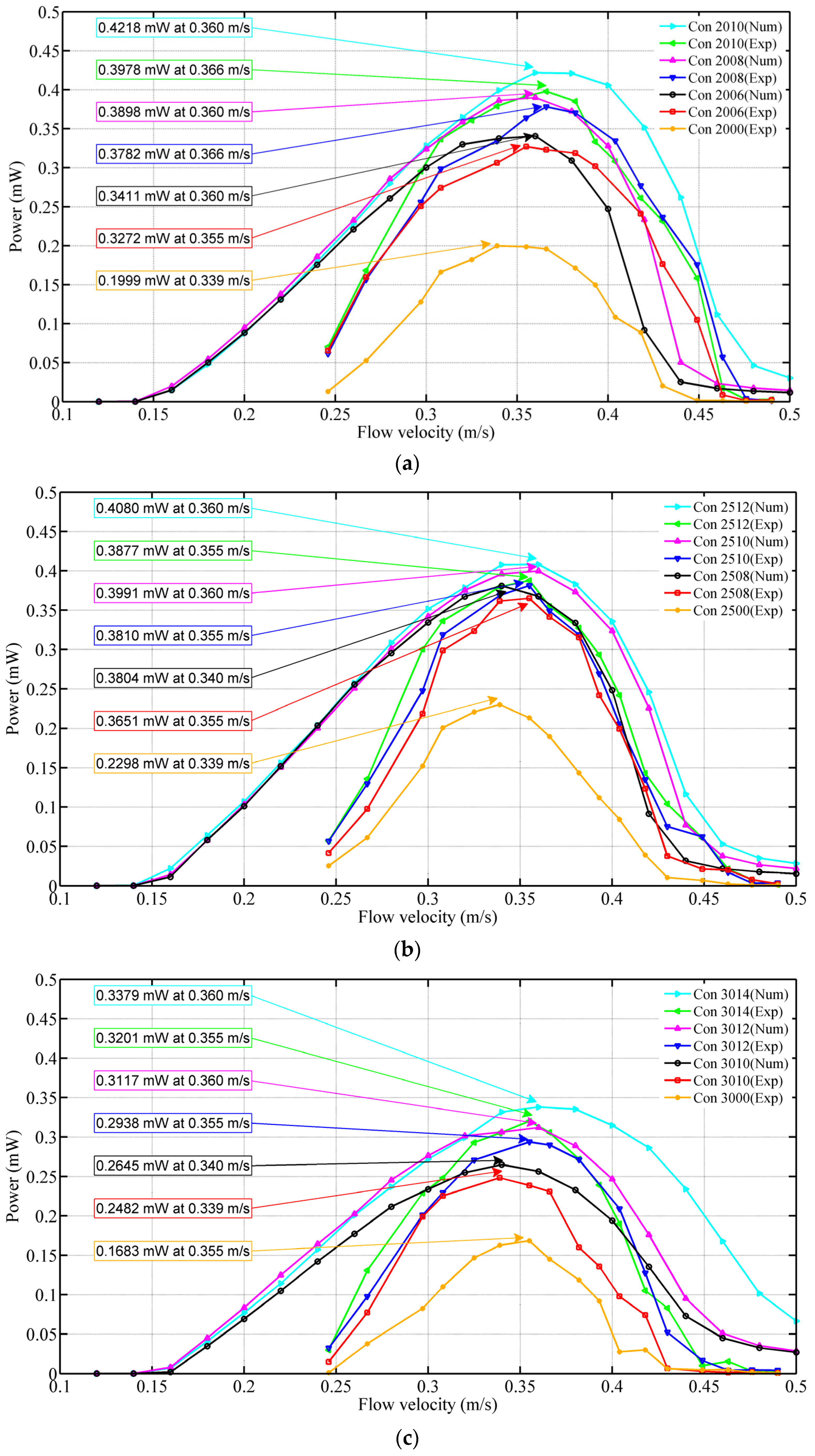
| Configurations | 2000 | 2006 | 2008 | 2010 | 2500 | 2508 |
| Pmax (mW) | 0.1831 | 0.2663 | 0.281 | 0.3267 | 0.2139 | 0.2763 |
| Configurations | 2510 | 2512 | 3000 | 3010 | 3012 | 3014 |
| Pmax (mW) | 0.3254 | 0.3273 | 0.1764 | 0.249 | 0.2624 | 0.2866 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shan, X.; Deng, J.; Song, R.; Xie, T. A Piezoelectric Energy Harvester with Bending–Torsion Vibration in Low-Speed Water. Appl. Sci. 2017, 7, 116. https://doi.org/10.3390/app7020116
Shan X, Deng J, Song R, Xie T. A Piezoelectric Energy Harvester with Bending–Torsion Vibration in Low-Speed Water. Applied Sciences. 2017; 7(2):116. https://doi.org/10.3390/app7020116
Chicago/Turabian StyleShan, Xiaobiao, Jie Deng, Rujun Song, and Tao Xie. 2017. "A Piezoelectric Energy Harvester with Bending–Torsion Vibration in Low-Speed Water" Applied Sciences 7, no. 2: 116. https://doi.org/10.3390/app7020116
APA StyleShan, X., Deng, J., Song, R., & Xie, T. (2017). A Piezoelectric Energy Harvester with Bending–Torsion Vibration in Low-Speed Water. Applied Sciences, 7(2), 116. https://doi.org/10.3390/app7020116