Adopting Sector-Based Replacement (SBR) and Utilizing Air-R to Achieve R-WSN Sustainability

1
College of Computer Science and Electronic Engineering, Hunan University, Changsha 410006, China
2
Faculty of Applied Science, Computer Science Department, Hajjah University, Hajjah, P.O.BOX 80004, Yemen
*
Author to whom correspondence should be addressed.
Information 2017, 8(2), 70; https://doi.org/10.3390/info8020070
Submission received: 23 May 2017
/
Revised: 15 June 2017
/
Accepted: 16 June 2017
/
Published: 21 June 2017
(This article belongs to the Section Information and Communications Technology)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Sensor replacement in the rechargeable wireless sensor network (R-WSN) is important to provide continuous sensing services once sensor node failure or damage occurs. However, satisfactory solutions have not been found yet in developing a sustainable network and effectively prolonging its lifetime. Thus, we propose a new technique for detecting, reporting, and handling sensor failure, called sector-based replacement (SBR). Base station (BS) features are utilized in dividing the monitoring field into sectors and analyzing the incoming data from the nodes to detect the failed nodes. An airplane robot (Air-R) is then sent to a replacement task trip. The goals of this study are to (i) increase and guarantee the sustainability of the R-WSN; (ii) rapidly detect the failed nodes in sectors by utilizing the BS capabilities in analyzing data and achieving the highest performance for replacing the failed nodes using Air-R; and (iii) minimize the Air-R effort movement by applying the new field-dividing mechanism that leads to fast replacement. Extensive simulations are conducted to verify the effectiveness and efficiency of the SBR technique.
1. Introduction
Wireless sensor networks (WSNs) have received significant attention from the research community in past years; they are used for various applications in several fields [1]. However, the search for deploying a self-adaptable network and successfully prolonging its lifetime still needs further investigation. A network usually consists of battery-powered wireless devices with sensing and communication capabilities that collect data about the environment or an event of interest (e.g., light, temperature, and movement) and relay data toward a “sink” in a multi-hop manner [2]. Research in this field has been dynamic for years, and several open issues await valid solutions [3]. Aside from constraints in terms of processing power and storage capacity, other significant issues in WSNs are the limited battery duration of sensors and the consequent limited network lifetime.
The sensors’ lifetime is still the main factor in WSN; addressing this issue requires energy to be almost always replenished. The ideal solution is to make the sensors harvest from their surroundings [4,5]. However, energy harvesting is, unfortunately, not steady and the total amount of energy harvested is barely predictable. For example, many factors affect solar energy harvesting, including the weather, the season, and time (weather exposed under the sun). This constitutes a great challenge in the design of energy efficient protocols for wireless sensor networks (in order to maintain them, improve their energy efficiency, and extend the lifetime of the networks) [6].
Rechargeable WSNs (R-WSNs) are a promising technology for addressing energy problems in WSNs, and therefore attract an increasing number of researchers and manufacturers to discuss the potential for actual industrial applications [7,8]. This technology possesses high-energy transfer efficiency, even under omni-directional transmission; it does not require line of sight, and it is insensitive to the neighboring environment [9,10]. The charging energy of R-WSNs is reliable and stable.
Progress in wireless power transfer techniques has advanced research activities in the direction of battery recharging, with high expectations for its application to WSNs. A hybrid charging scheme combines charging by a mobile charger with a directional antenna and energy trading (e.g., transferring and harvesting between neighboring sensor nodes) [11]. Sensor replacement techniques have also been widely studied as a means of providing service continuity in the network. Recharging or replacing the sensor nodes that are running out of energy can be identified and researched as two main objectives. Mobile robots are used as solutions for the execution of either recharging or replacing tasks automatically and autonomously to maintain the WSN, thus reducing human intervention [12].
This study focuses on the manner in which R-WSNs are deployed and efficiently serve a complex geography. R-WSNs can collect information, monitor, and perform other multiple tasks. They are sustainable networks and have high performance, which are important factors for WSNs. For example, in a forest-monitoring system, we need to deploy numerous sensor nodes to cover the entire sensing field. We assume that all nodes have the same amount of energy, capacity, and transmission capabilities. These nodes can determine their location automatically from the first time after deployment. In the case of detecting failure or damaged nodes in the network, several problems may affect network sustainability, data collection, and field-monitoring results. Our approach shows good results in detecting and handling this type of failure in a large monitoring field (such as forest fire monitoring).
1.1. Related Work
Most of the studies related to node replacement in WSNs have handled these problems by assuming that they have previous knowledge of the node or event position, or even the node energy consumption [13,14,15,16,17,18].
In [1], three policies were proposed. Each policy determined the importance of each failed node on the coverage and lifetime of the network by assigning a weight to each failed node. If the weight was greater than the policy threshold, the node was replaced; otherwise, it was ignored. These policies aimed to maximize the lifetime and simultaneously minimize redundant resources. The weight of the network knowledge should be evaluated, and a central server was required to calculate them.
In [8], knowledge of the events was needed, and the position of redundant nodes was known because they were stored in the sink. The proposed scheme scheduled the travels of the robot and duty cycles of the sensors. The goal was to maintain coverage while minimizing the traveled distance. However, the scheme only considered point coverage, similar to that proposed by [13] (in which area coverage is considered). The nodes were grouped in sets, a staircase-based scheduling model was implemented, and a fixed number of backup nodes were deployed in sets.
Authors in [19,20] have studied the network to provide adequate quality of service (using energy replenishment and data collection) through limited mobile devices in WRSNs with multiple sinks. Scheduling the mobile devices’ recharging and data collection capabilities ensures that the total weight of the recharged sensors can be operated without time limits being maximized.
The mobile robot is utilized to perform replacement and recharging tasks. To the best of our knowledge, researches have not explored the benefit of the airplane robot (Air-R) replacement from the R-WSN perspective (utilizing Air-R replacement). Nevertheless, significant research in the sensor network community has explored high replacement efficiency using mobile robots [21]. Some of the mobile robot problems are the large travel distance, the exhaustive search process to find the failure node which must be replaced, and the harsh environment in which it works. Therefore, the proposed method in this paper minimizes the travel distance and pressure work of the mobile robot effectively, deals with any failure of the network, and solves problems before expansion.
Sensor nodes are deployed regularly and at random in a circular area, which is divided into multiple rings with a constant width [22]. A mobile robot is utilized to recharge WSNs at the circular trajectory of the mobile robot (to the energy consumption rate of each sub-region of the network). This study investigates how the mobile charger (MC) traverses and transfers energy to the sensor node in a wireless method. This strategy can significantly reduce the total death ratio of nodes compared with traditional WSNs.
Some researchers have worked on the distribution of sensor nodes to prolong the lifetime of sensor networks [23], presenting a novel edge-based routing protocol called BeamStar for WSNs. The authors divided the network into rings and sectors. To provide location information for the nodes, the power-controlled capability of the base station (BS) was utilized to scan the network with different power transmission levels. In [24], another routing protocol for edge-based WSNs was presented called the cluster-based BeamStar (CBS). The CBS was introduced to overcome some of the disadvantages of BeamStar. The CBS uses the same technique as BeamStar but with a developed scan process to provide sensor nodes with location information. This protocol is successful in using network resources optimally and in reducing internode communication load. The CBS is explained in three different phases, namely, locating, cluster-building, and data-transmitting phases. In the first phase, the entire field is scanned using different transmission power levels (R).
In the current study, we utilize prior research to explore the potential infrastructure support by an edge BS to scan the entire area of the R-WSNs, and divide the infrastructure support into rings and sectors using BS capabilities. We also develop techniques for detecting and replacing the failure node to make the network considerably sustained.
Our proposed technique is to utilize Air-R to replace the failed nodes in R-WSN. This technique can select, carry, and unload sensor nodes. Whether or not failed or damaged nodes are found, the Air-R can fly to the failed node location and unload new functional nodes. We assume that the BS will process the information collected from nodes in the monitoring field. This operation helps in analyzing the collected data from the field and predicts the node activity via knowledge base (KB). KB periodically reviews the density of the nodes recharging requests to study and evaluates whether the incoming requests from nodes are normal. The BS determines which nodes have the highest abnormal recharging requests (because they may be running out of energy fast or their battery is damaged—which means that the node is becoming useless and must be replaced). BS can also verify which sector this node belongs to; therefore, BS sends Air-R to this sector to handle this specific failure in the network by replacing the failed node.
1.2. Network Parts
Our proposed scheme consists of the following three main parts:
- (a)
- Sensor node. As mentioned above, we need to acquire accurate and regular information about sensing field monitoring for a certain geographic area. Thus, we randomly deploy a large number of sensor nodes with particular specifications, as we will mention in the next section.
- (b)
- Base Station (BS). This part exploits BS characteristics, such that it has no energy constraints. The main tasks of the BS are:
- It fully controls and manages the sensors network (sensing field).
- It divides the R-WSN field into sectors, as in [24].
- It performs the clustering process and selects the cluster head (CH) periodically (according to scheduled times and residual energy).
- It continuously and periodically (as agreed beforehand) informs nodes in the sector when electing a new CH.
- It receives recharging requests from nodes with a low energy threshold and arranges the recharging trip of the MC to recharge nodes [25].
All previous services of BS can be provided. This study also utilizes BS characteristics to offer the following additional services:
- Processing the information collected from nodes to study the activities of different nodes.
- Evaluating recharging requests to determine whether the coming requests from nodes are normal (based on KB study nodes).
- Sending and adopting Air-R for trips to replace failed or damaged nodes in the R-WSN sensing field (the properties of Air-R are elucidated in the next sections).
- (c)
- Air-R. Air-R is used in this proposal because it can cover a large area, and has a fast moving speed and freeway movement. The replacement process is easy because Air-R is provided with location information for failed nodes, and no complicated mechanics is required to operate the failed node. Therefore, the Air-R can detect or replace failed nodes at locations that are ordinarily unreachable.
1.3. Problem Statement
This study aims to (i) increase and guarantee the sustainability of the R-WSN to create a high-efficiency network; (ii) rapidly detect the failed nodes in the sensing field by utilizing BS capabilities for collecting and analyzing data to achieve the highest performance in replacing the failure nodes using Air-R; and (iii) minimize the Air-R effort and movement by applying the new field-dividing mechanism that leads to fast replacement. We propose the sector-based replacement (SBR) by utilizing BS features to divide the monitoring field into sectors, and analyze the incoming data from the nodes to detect the failed nodes. We then send the Air-R to perform a replacement task. To the best of our knowledge, this is the first paper to discuss the problem when a failed or damaged node is found in R-WSN and the replacing technique in R-WSN. We make the following assumptions in this study:
- (a)
- Sensors are randomly and uniformly distributed in the field. We assume that all nodes can detect their own location in the initial deployment process. The BS then starts to divide the field into sectors, and CHs are selected for each sector (the same as in [24]).
- (b)
- The Air-R travels at a constant speed, and it is attached with a GPS to locate and replace the failure nodes.
- (c)
- Through continuous synchronized information exchange between BS and Air-R, the Air-R can determine whether it can serve additional sectors (replacing the failed node in the sectors) after completing the first mission (replacing sector nodes that are already planned before the Air-R departure).
- (d)
- The BS manages the coverage inside the sectors before the node replacement process to keep the coverage area and data transfer in the sectors [14].
2. Modeling and Formulation
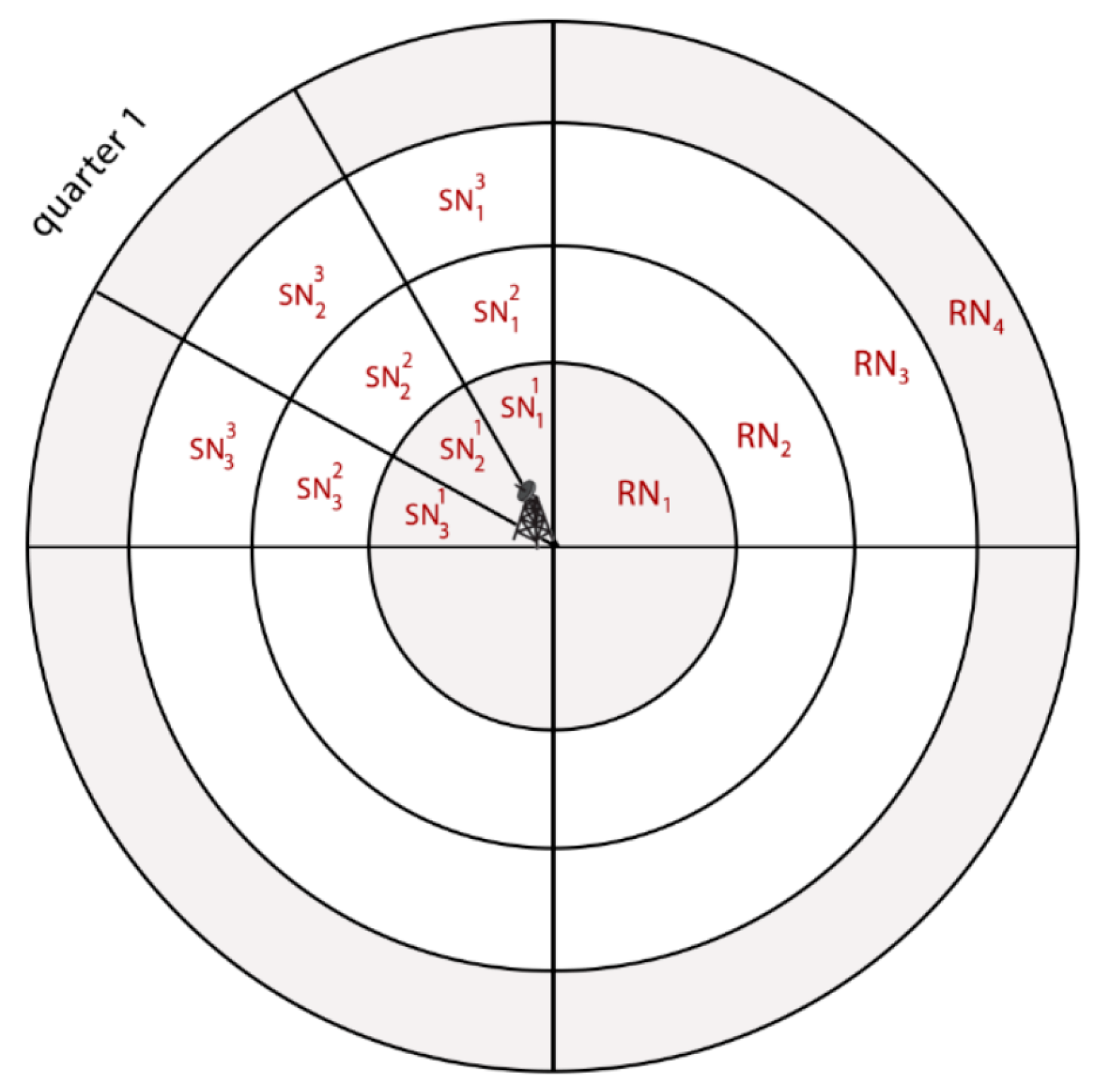
We consider a network that contains numerous N sensors, denoted as n1, n2, n3, …, nk. These sensors are deployed in the monitoring field. The field is divided into rings and small areas called sectors (denoted as ), where j and i represent the ring number (RN) and sector number (SN) within any area , respectively (as shown in Figure 1). The required sensing coverage level is the same at any point of the area. In this section, we discuss our proposed replacement technique (called SBR) in three steps.
2.1. Field Partitioning and Sector Area Calculation
Sensors and a stationary BS are deployed over the sensing field. We find this to be an appropriate and effective mechanism for dividing the R-WSN field into convergent partitions in space, but with different numbers of nodes under the geographical constraint of the R-WSN field. Therefore, we assume that this BS is located at the center of the network field and has no energy constraint. The BS in the network is equipped with a power-controlled capability directional antenna, which can reach any part of the network [22]. It helps when dividing the R-WSN field (using an antenna beam width () to define the RN and SN). The same scan order of CBS in [23] is considered in this study. We examine one quarter of the network for simplification. We consider the field to be distributed into four main quarters, and each quarter is divided into a given number of sectors by varying its transmission power level (R) or radius, and beam width (). The signal sent by the BS to define the radius Rm of the mth ring is calculated using the following equation:
where R1 is the radius of the first ring, which is used to obtain the angle of beam width () for the mth ring in the following equation:
From (1) and (2), the area Am of all sectors in the mth ring is obtained, as shown in the following equation:
where Am is the area of the mth ring with radius Rm. The sector areas on the same ring are equal, and the area of one sector is calculated as
The area for a specific sector ASm is determined. SN represents the number of sectors, and is the radius of the last ring. The network density is calculated as , where N is the number of deployed sensors.
The partition mechanism of the network process is illustrated in Figure 1. The first quarter shows the first phase of the network-dividing process, in which the network field is divided into a set of rings with different transmission power levels. The corresponding sectors are represented with their rings. In the network initialization phase, we assume that each node nk ∈ N needs to send its location information to the BS with an auto hi message (AHM). This message contains the node number (nk), residual energy (REk), and message release time (rtk), as shown as follows:
This message is the first that every node must send to the BS. The nodes have not chosen the CH for each part (sector) yet to contact with the BS. Therefore, the nodes can use the normal aggregation style to send these messages to the BS. The BS starts to collect and analyze these data to determine the node location and geographical relations among themselves [17]. After the R-WSN field is divided into rings and sectors, the BS begins the next phase by selecting the CH for sectors, depending on their residual energy and location [26]. The CH should have more energy than the other nodes and be directly connected with all nodes in the sector. BS estimates the residual energy from the collected energy information. It finds which node energy level is higher than the average energy level, and selects those nodes as CH (more than one CH may exist in one sector). We have divided the field into SN sectors. Each sector has one CH; if there is a large sector then we assume these large sectors will have more than one CH. This means the communication between the normal node and the CH is a single-hop communication. Therefore, all normal nodes do not have high-energy consumption rates because there is no load on them. When the BS receives high recharging requests from these nodes, it knows whether it is an extraordinary or normal node which is supposed to have failed, therefore it knows that this node must be replaced; but if the requests comes from nodes which selected as CH, then this high request is because of the working load on this CH.
The BS automatically informs all nodes in the network about the CHs for sectors. This technique greatly reduces the energy required for internal communication among nodes to select the CH (as in Algorithm 1). This study proposes that all nodes send a periodical message to inform the BS about the node situation (such as in Equation (6)). The BS analyzes these report messages to study the node status.
| Algorithm 1. Find and select Cluster Head |
| Input: N set of nodes. |
| Output: select CHs for each sector. |
|
2.2. Reporting and Failure Detection
Three types of messages exist between BS and nodes in the sensing field: the first is the AHM that all nodes send to inform the BS about their own status for the first time; the second is from the BS to the nodes, informing the nodes about their location area and CH after dividing the field; and the third is the recharging request from the nodes to the BS, as shown in Equation (7).
The BS receives the sensor-recharging requests (Eqk) and adds these requests to the queue (Qc), as shown in Equation (8). The BS collects incoming messages from the nodes and processes these data to solve node problems by either recharging or replacing the nodes. The BS receives various abnormal recharging requests from the same node. Even after being recharged shortly (i.e., after recharging or during the charging process), the same node still sends a request for recharging. In this study, we assume that the maximum battery lifetime is the given battery material breakthroughs for ultra-fast charging [27]. Therefore, depending on , the BS decides which sectors and the supposed failed nodes that should be replaced first. The BS then organizes the number of requests for each sector in the sector replacement sequence (SRs), as shown in the following equation:
where is the number of nodes in the sectors that must be replaced. Before the Air-R starts a new round trip (RT) to replace the nodes in the sectors, the BS calculates and analyzes the information based on the priority number (PNmax), which is the number of abnormal recharging requests for each node (i.e., if some nodes have a large number of abnormal recharging requests in a sector, then they are failed nodes and have high priority to send the Air-R to replace them). The BS sends the node replacement sequences (NRs) to the Air-R with the PNmax, as shown as follows:
2.3. Failure Handling
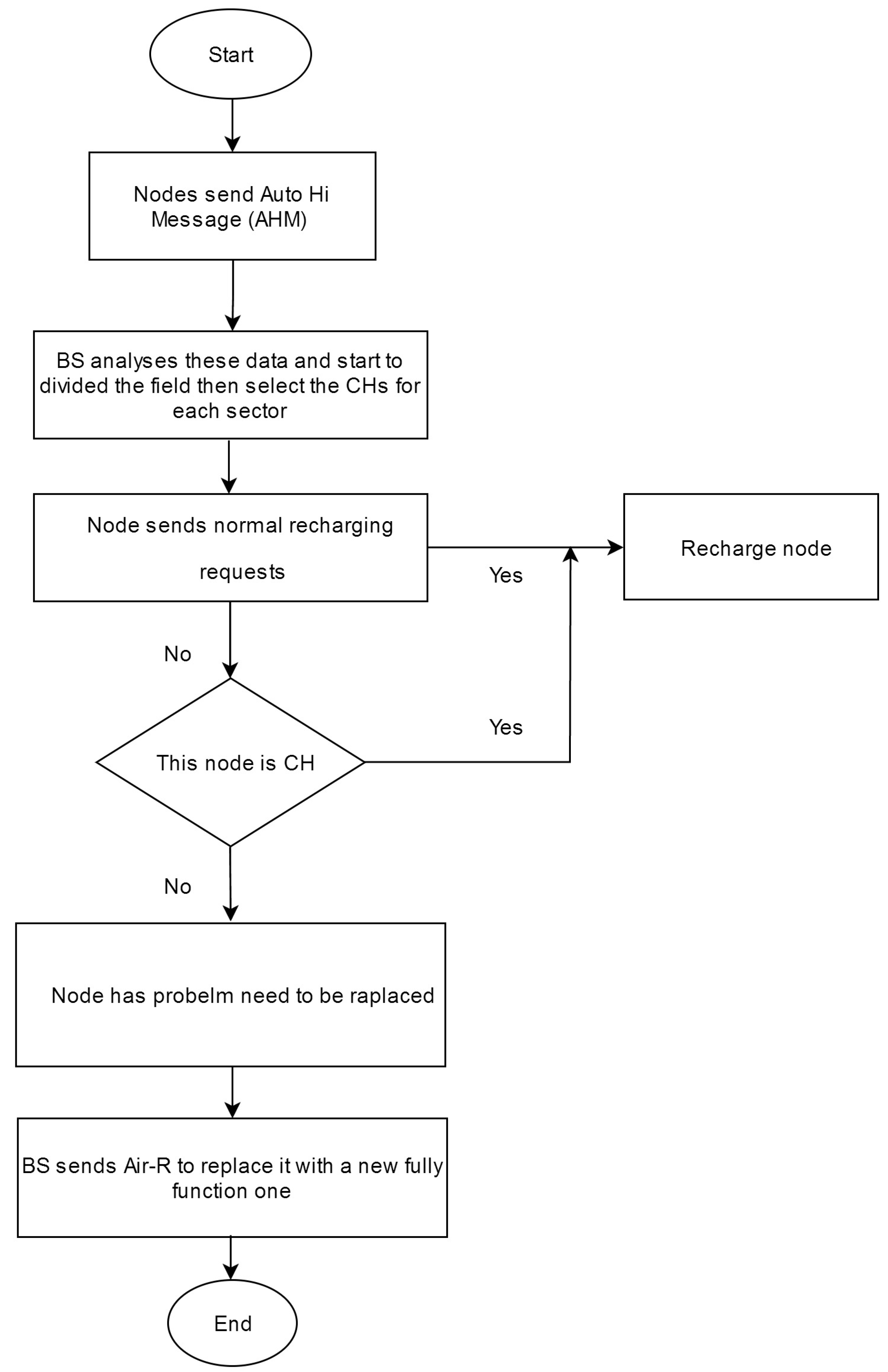
As explained before, when the BS receives recharging requests from the nodes, it can determine the failure by analyzing these requests and verifying which node sends several abnormal recharging requests, even if it has been recharged shortly. This node is considered having a problem (i.e., either failure or damage). The BS prioritizes such a node and decides which one needs to send Air-R to replace it depending on PNmax. Air-R is selected based on the current location for Air-R. Specifically, the BS selects the Air-R with the closest current location to the sector containing the failed nodes. The continuous synchronized information exchange with the BS allows the BS to remain informed of the current location of the Air-R. When the Air-R moves at a certain distance on its path, to replace the failed node with a new fully functional one at the same location of the failed one, the BS deletes the replaced nodes from the node set N. Therefore, recharging no longer takes place for the failed node when it has already been replaced. The node replacement process can be performed in three steps: (i) The BS analyzes the recharging request and determines if failure occurs; if failure is determined, then it starts the next step; (ii) The Air-R is arranged in replacement RT to replace all failed or damaged nodes with a new fully charged one to fulfill its working duty; (iii) Recharging no longer occurs for these failed nodes until the batteries are drained. The application of the proposed SBR technique can guarantee R-WSN sustainability, and fast expectations and detection of the failed nodes in the sectors before this failure become complicated or unsolvable.
The Air-R can determine whether it can replace the additional node after completing the first mission RT (replacing sector failure nodes that are already planned before the Air-R starts RT). The BS has the global information of all the failed nodes and all the Air-R traveling distances, and thus the movement energy of Air-R (because it always forwards the NRs to the closest Air-R). When the Air-R is moving toward a failed node, the Air-R can still receive replacement requests from the BS. The Air-R effort movement can contribute to fast replacement by applying the new field-dividing mechanism. Figure 2 illustrates the flowchart for the replacement process from the beginning, when the sensors are deployed until discovering the failure.
2.4. Air-R
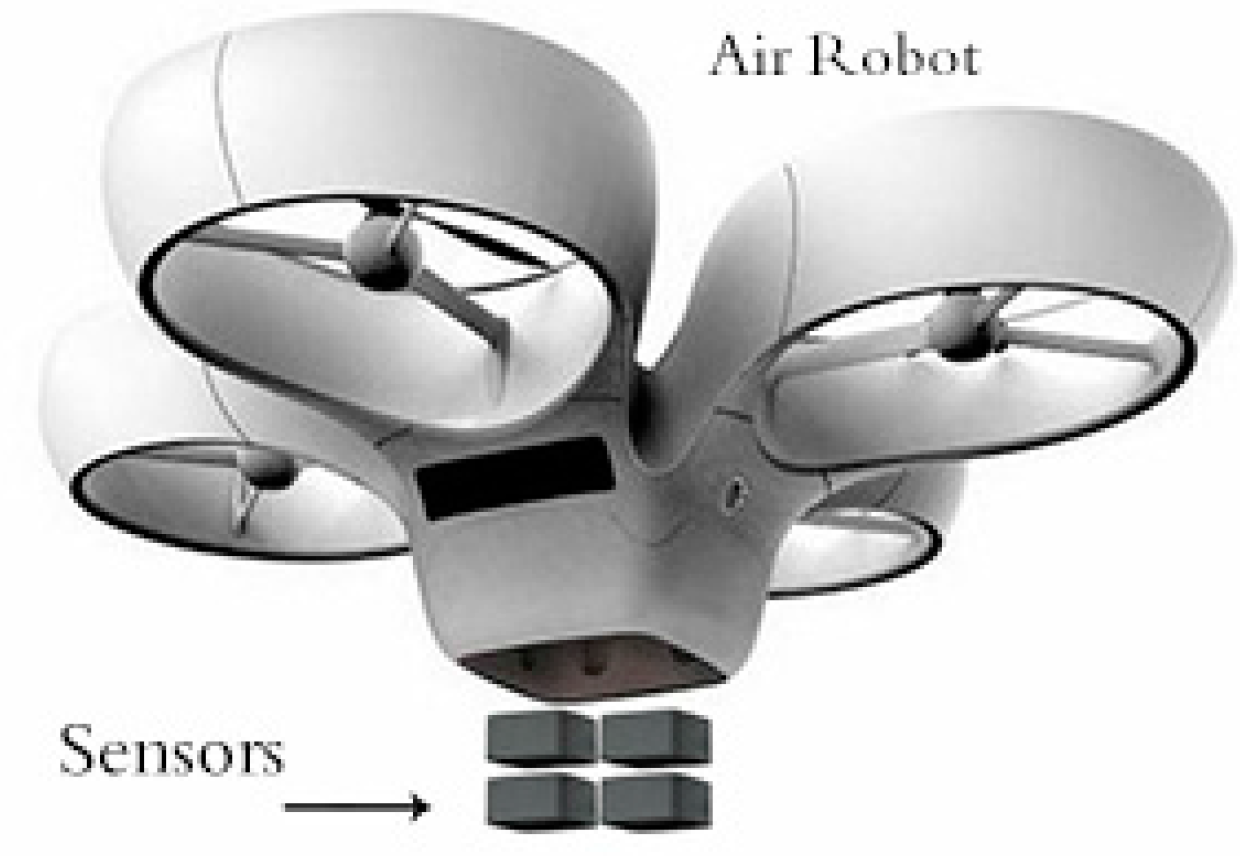
Air-R has been adopted in the military field over the last decade and achieved great success [24]. Air-R currently has a wide range of nonmilitary applications, from remote sensing [25] to autonomous aerial water sampling [28] to, or in marine environments (such as in a mobile data collector) [29]. Researchers have shown that they can significantly replace sensors using a mobile robot [25]. For instance, using Air-R to prolong the sensor network lifetime based on recharging or replacing is a promising solution, especially in locations where they are normally inaccessible to humans. Figure 3 shows the Air-R model and the unloading of a fully functional R-WSN in the monitoring field.
The major mobile robot problems are long travel distance and the exhaustive searching process to discover the failure (i.e., increase mobile robot effort)—especially in unsafe places for humans to reach the failed nodes, such as volcanoes, etc. The benefits and characteristics of the BS are utilized to meet various requirements that any application demands. Our study utilizes the BS to expect any network failure, solve problems before expanding, and find the failed nodes that need to be replaced in the network. Air-R successfully reduces work pressure and the travel distance; the efforts of the Air-R are also decreased.
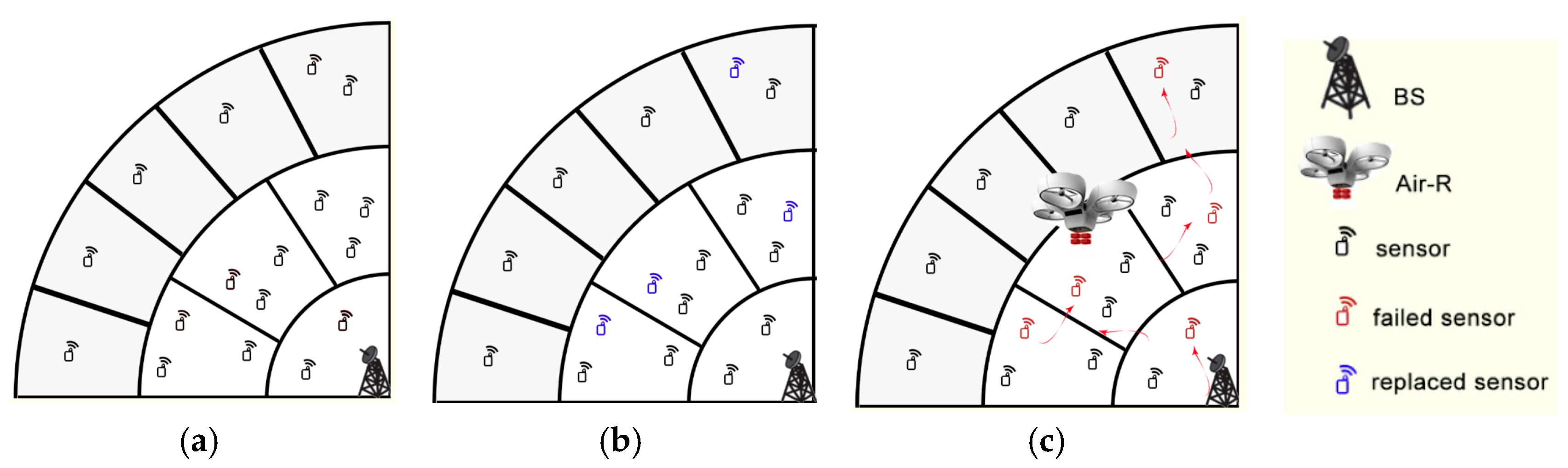
Sensor nodes are usually distributed over a large area, and Air-R can cover a large area because of its fast-moving speed and freeways. Air-R can also replace sensor nodes at locations that are ordinarily unreachable. Therefore, the replacement process is easy because no complicated mechanical mechanism is required to operate the sensor node. Figure 3 shows a moving example of Air-R to discover failure and replace failed nodes. In this example shown in Figure 4c, the Air-R starts from the BS to sector , then to and , etc.
We have experienced several monitoring fields to show good results. If many sensor nodes are distributed widely, deciding which nodes should be replaced when having a node failure in one or more sector is challenging. The continuous synchronized information exchange between BS and Air-R allows the detection and replacement of the failed nodes in the R-WSN as a long-term monitoring system (by regularly checking the recharging request from the sensor node on the field to the BS).
In this study, we answer the following question: Given the BS, Air-R, and a set of sensor networks N, what is the most optimal strategy for the Air-R to replace the failed nodes in sectors to make the network more sustainable, and therefore prolong the lifetime of the R-WSN as much as possible?
The Air-R is allowed to fly to the next failed node at all times after receiving the replacement mission from the BS in RT. At this point, we can distinguish two cases: either the Air-R is at the BS, or it is anywhere else in the field. If the first case occurs, then RT can be considered; if the second case occurs, then the possible situations should be checked (as in the schedule replacement algorithm (SRA) in Algorithm 2). The situations are as follows:
Situation 1.
The replacement time (Treplace) to replace all failed nodes in NRs may be larger than the round-trip time T; or, the energy needed to cover the complete RT () distance may also be more than that available in the Air-R (EAir-R, expressed in terms of time needed as a condition), as shown in (11):
Situation 2.
The Air-R has insufficient nodes () to replace all failed nodes in NRs, as expressed in (12):
Situation 3.
The time available to replace the failed nodes Treplace is not enough to replace them all, which is expressed in (13):
In all previous situations, the BS starts analyzing and repeats adding to NRs until the PNmax conditions are no longer met. Specifically, the node with the highest PNmax is removed from the set of nodes N, which means that it is a failed node. In this emergency condition, the proposed solution is implemented with the expectation that the failed nodes will somehow still recharge until replaced.
Situation 4.
The time available to replace the failed nodes is adequate to replace all of them. The number of available replacement nodes is also sufficient, and the energy needed to cover the complete round trip distance is more than that available in the Air-R. These conditions are expressed in (14):
In Situation 4, all nodes in NRs are replaced. The Air-R flies back to the BS for the next RT, or it checks if it can perform another replacement RT. The SRA describes the behavior of the BS, Air-R, and nodes; it schedules and selects the optimal situation for Air-R to replace every failed node in NRs.
An optimal path is determined for Air-R to visit and replace the failed nodes in the sector, which have the largest priority and are provided with a new fully functional one (with a minimum travel distance that is an important phase in the proposed network; this problem can be demonstrated as a well-known traveling salesman problem (TSP)) [30]. The travel distance should be minimized to save the time and energy of the Air-R. Therefore, we proposed the schedule replacement algorithm to solve the problem, as in Algorithm 2.
| Algorithm 2. Schedule Replacement Algorithm |
| Data: Set of sensor nodes NRs at time T |
| Result: Replacement on NRs in every round trip (RT) |
| RT within T |
|
3. Performance Evaluation
In this section, we evaluate the performance of the proposed SBR technique for R-WSN through an experimental simulation. We investigate the network sustainability and the Air-R status (efficiency and effort). A set of simulations are run to experimentally determine the optimal value of period T and the appropriate solution for Air-R to replace the failed node described in previous sections.
Simulation Results
Two different network sizes are examined in our experiments: namely, large and small networks. We examine the influence of SBR on both networks to show the effectiveness of our proposed technique. We investigate a small network consisting of 10–100 nodes that are randomly deployed in the monitoring field with radius R = 100 m and a large network consisting of 100–1000 nodes with radius R = 600 m.
The BS is located at the field center and at the corner of each quartet of the R-WSN monitoring area. As explained in Section 2, the BS divides the network field into a number of rings and sectors utilizing the directional antenna with power control capabilities. The BS helps select the CH for each sector after receiving information from sensors and then automatically informs all nodes in the sectors about their CHs.
Our working environment is a dynamic sensing activity, in which each sensor randomly sends its recharging requests through the CH to the BS. The BS checks and analyzes the incoming requests from nodes to find any abnormal recharging requests and determine the node sector location. Then, the BS sends the Air-R in RT within a given trip time T. The analysis is performed for values of T ∈ 30, 60, 90, 120, 150, …, 350 min. We examine the monitoring field twice to show the network scalability and sustainability. We assume that the Air-R flies at a constant speed of 6 m/s, and that the constant replacing time for each sensor is 3 s. Every esteem in the figures is the mean of the outcomes (achieved by applying the proposed technique to 20 different scans of the field for the same network size). We first examine the performance and sustainability of the network without the proposed SBR technique and then apply the proposed SBR in small networks (by varying the network size from 10 sensors to 100 sensors within T).
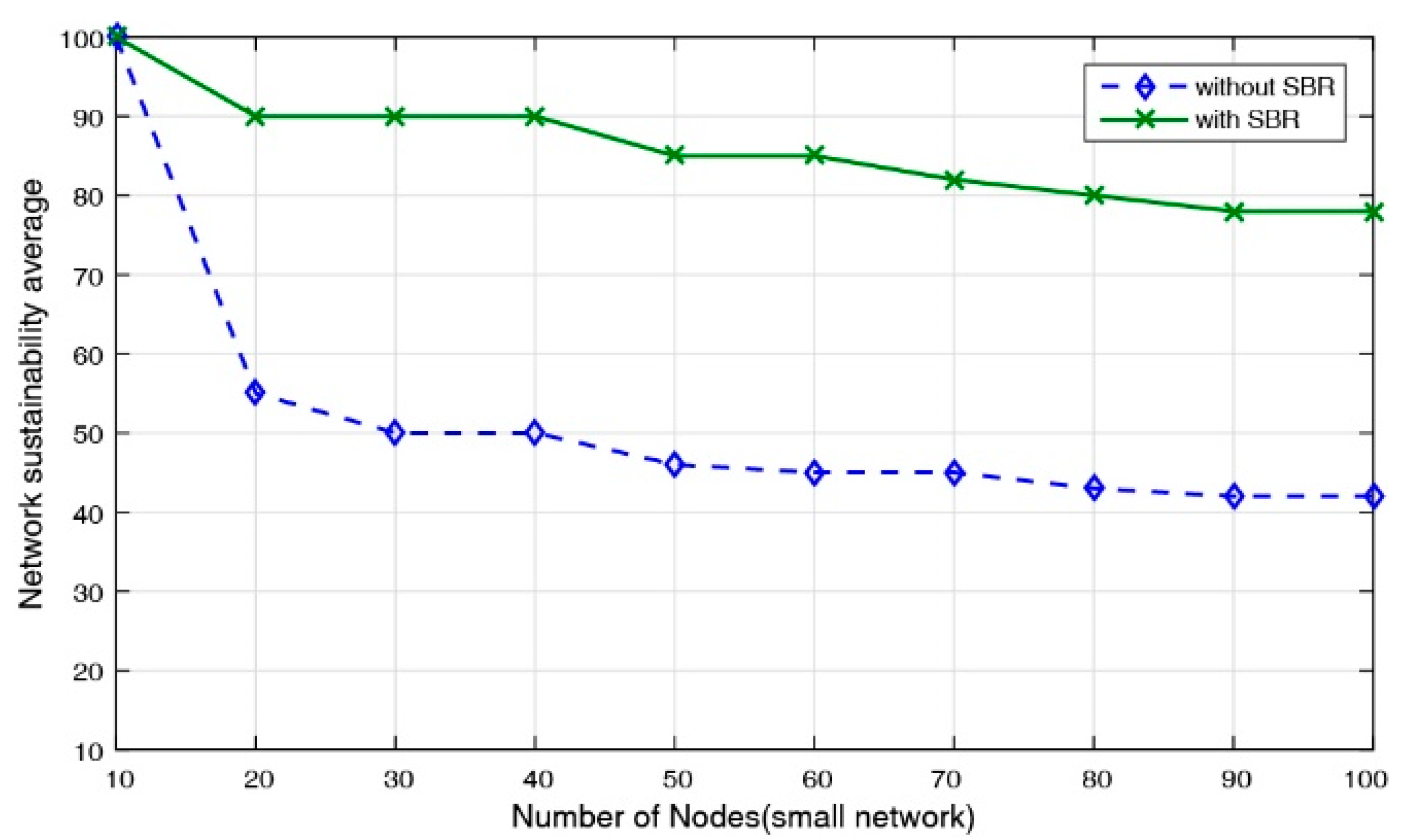
Figure 5 shows that applying the SBR technique significantly improves R-WSN performance and network sustainability for a small-sized network. The figure shows that the average of the network sustainability (using the SBR) starts from 100%, and becomes sustainable at 80% with the increase of the nodes; whereas, it is sustainable at 42% without SBR. The sustainability average gap between them is high, particularly if the network size is small. A few damaged nodes are determined, which may affect network efficiency and sustainability. Hence, the SBR technique can make the network more sustainable.
Similarly, when the network size is greater than 200 sensors, network sustainability keeps the ratio at 78% with SBR Figure 6. Thus, the proposed technique keeps the sensors alive with time. Without applying the proposed SBR, the ratio is less than 37%. Therefore, the performance and sustainability of the network increase with SBR. Clearly, the proposed technique can work effectively in large networks due to the early and rapid detection of failed nodes. This technique successfully discovers the failure by studying and analyzing the recharging requests from the nodes to the BS (as well as the characteristics of the Air-R) in order to reach the exact sector and replace the failed nodes at the right time.
When utilizing the SBR technique in our analysis, we focus on the following key performance parameters:
- (a)
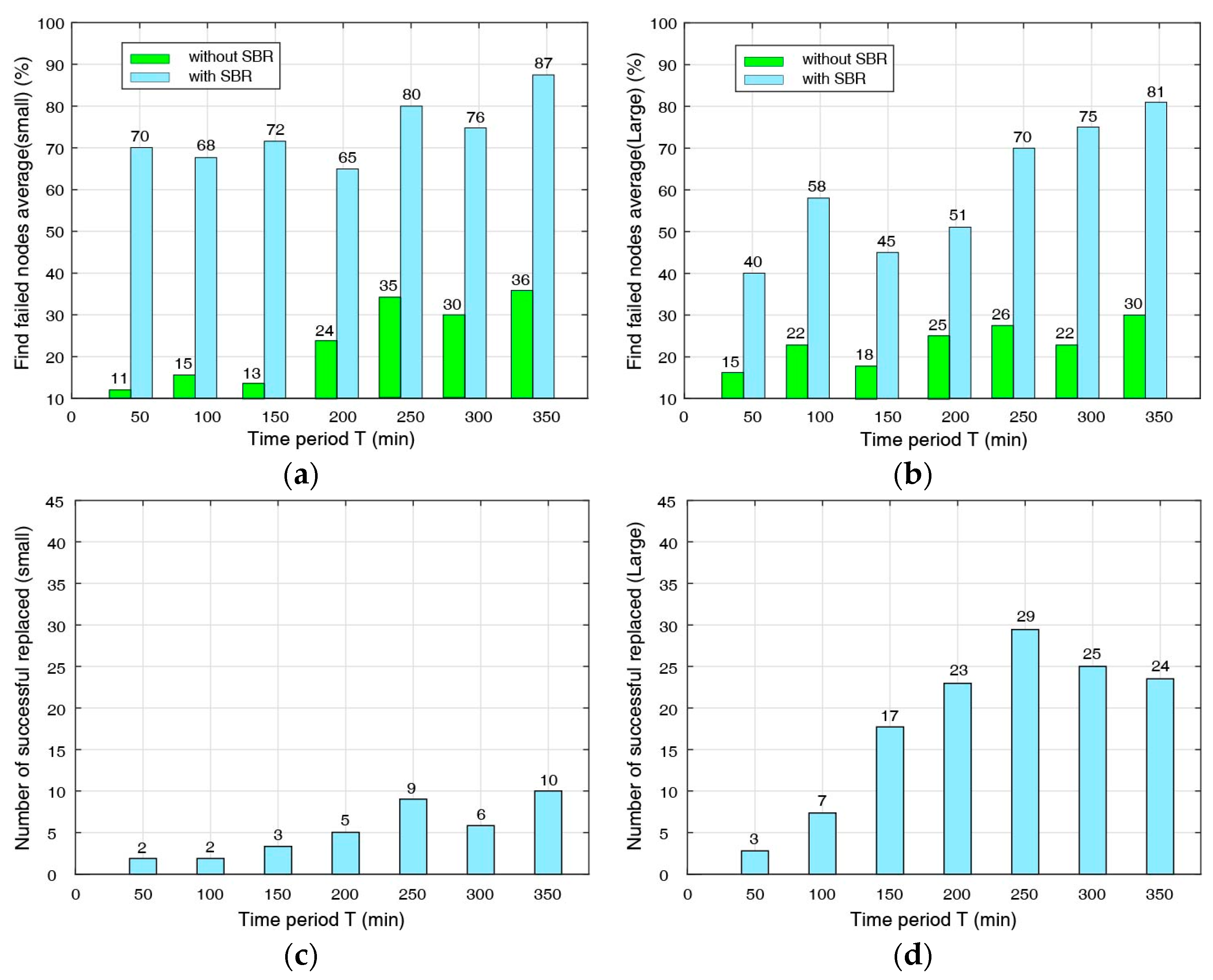
- Network efficiency and sustainability average: This parameter demonstrates the number of times the objective of keeping all sensors alive is reached when the simulation runs several times. In the proposed analysis, the solution is compared in terms of R-WSN sustainability in a small or large network. The obtained result is plotted in Figure 7. For the adopted simulation settings, the replacement techniques perform better than recharging failure nodes. This result is attributed to the fact that the time required for node replacement is significantly lower than the time needed to continuously recharge the failed nodes if failure occurs, which is a reasonable assumption. Figure 7a,b shows that the average of detecting and expecting the failure node is high in both network sizes when the SBR algorithm is applied (i.e., 87% for small R-WSN at the end of time and 36% without applying the SBR). For a large-sized network, the average is 81% with SBR and 30% without applying SBR. Therefore, the SBR technique utilizing Air-R always succeeds in keeping the network alive with high efficiency and sustainability.
- (b)
- Fast detection and the number of replaced failed nodes: These parameters give a quantitative value of the number of failed nodes each time when Air-R takes a RT (in which the SBR technique succeeds in keeping the network alive). Figure 7c, d illustrates the number of the replaced failed nodes utilizing the high capability of the BS in detecting the failed node (based on the calculation and analyzing the incoming data from the nodes through a continuous synchronized data exchange between BS and Air-R on both network sizes). Figure 7c shows the number of successful nodes replaced in the small network. Particularly, the Air-R starts to receive the replacement requests from the BS at the beginning, successfully replaces two failed nodes, and receives more replacement requests until no more requests are acquired (or it needs to come back to the BS). Similarly, Figure 7d shows the number of successful nodes replaced in the large network. The Air-R successfully replaces three failed nodes in the first 50 min (which continues to increase), and detects the failure to exploit the replacement task until no more requests are received from the BS. This condition is due to the early and fast detection of the network failure, which leads to the sustainability and high performance of the network.
- (c)
- Network performance. This parameter is the average value expressed in minutes between the network start up and the first failed node found in the network. Network performance refers to the number of nodes that have been replaced to apply network sustainability, as shown in Figure 5, Figure 6 and Figure 7 (when the failure is detected before it affects the network).
- (d)
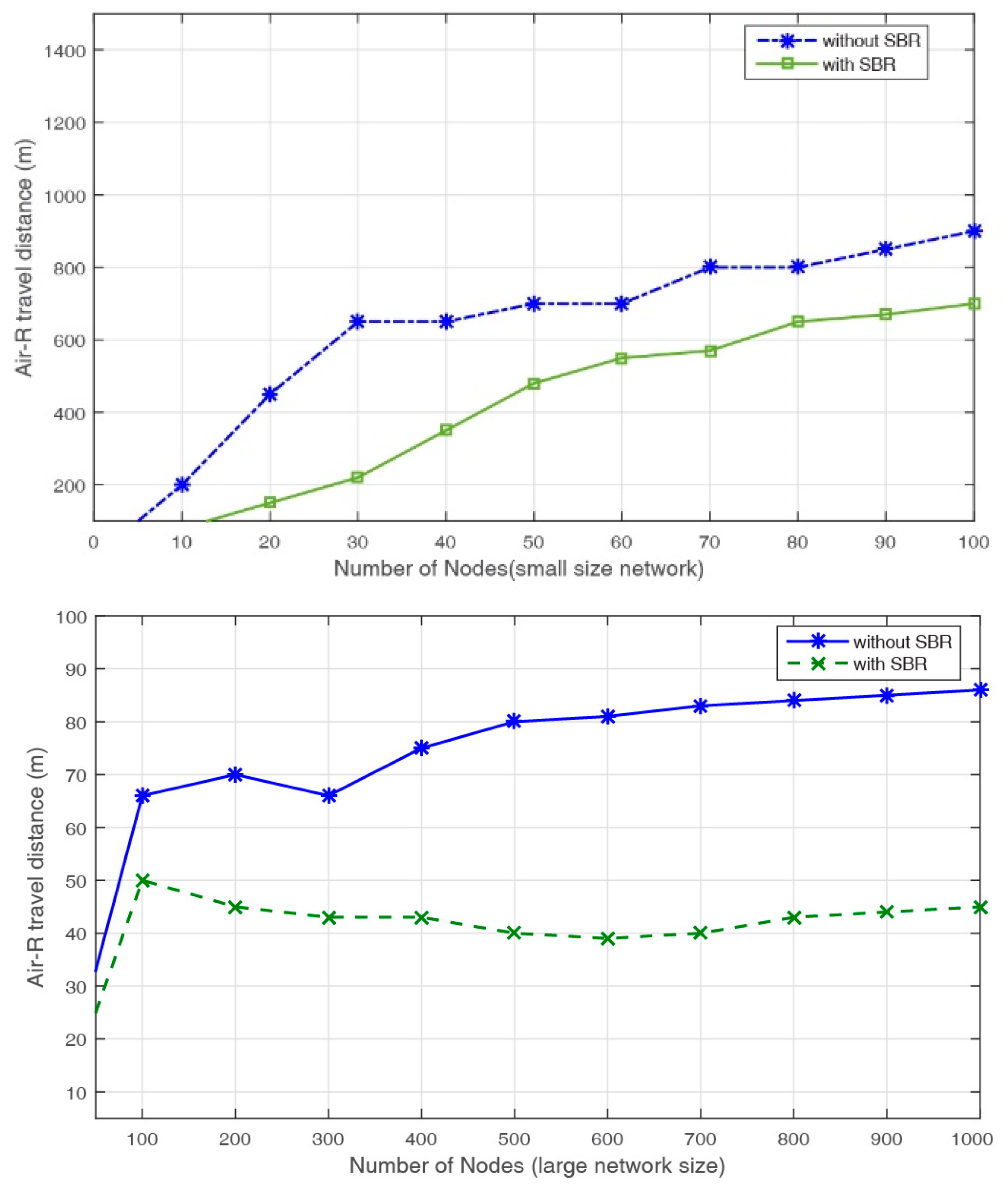
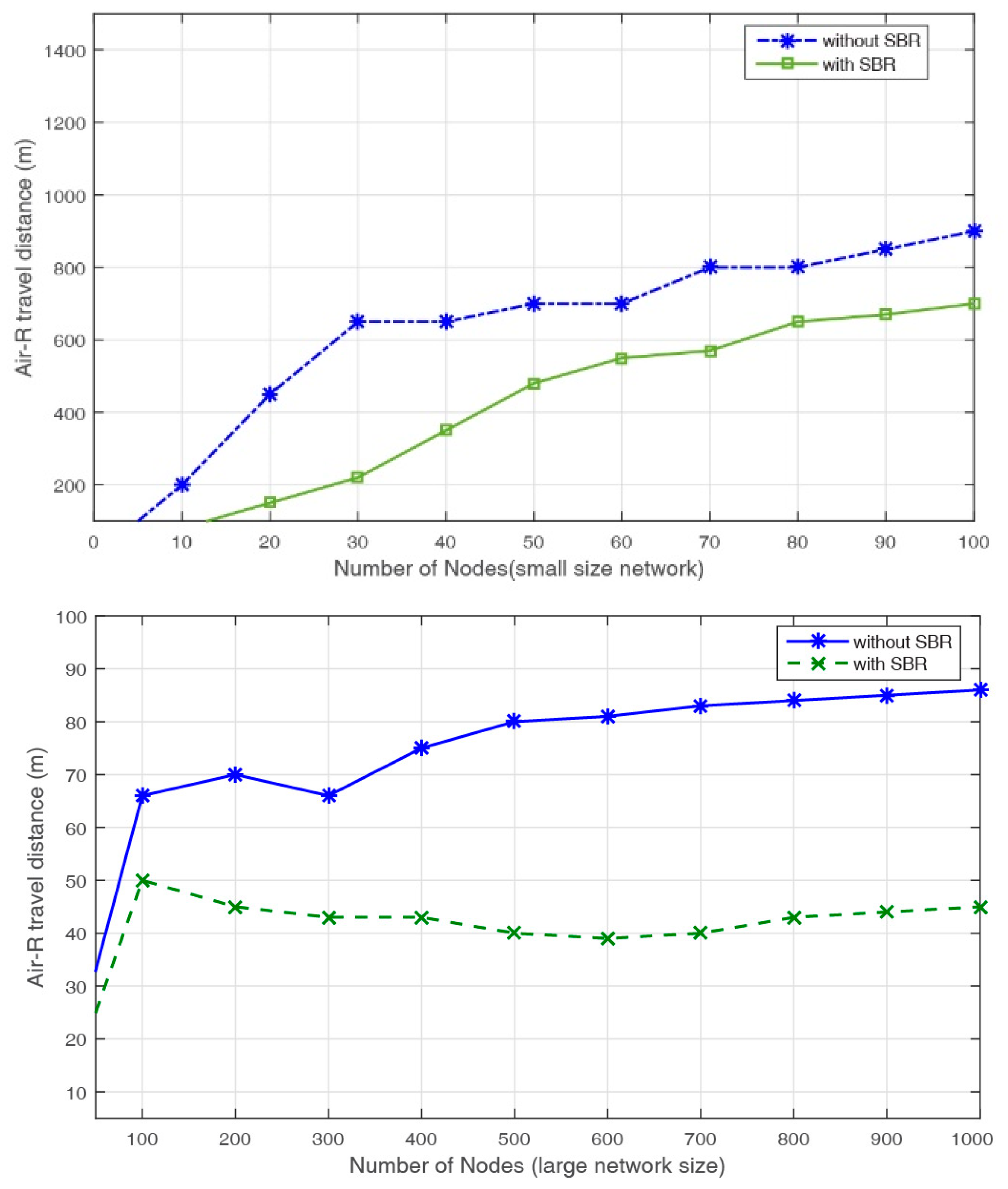
- Air-R travel distance. This parameter captures the amount of distance spent by the Air-R in flying around the network. The Air-R travel distance highlights how our proposed field partition is efficient in reducing the travel distance for the Air-R and decreasing the Air-R effort to cover the monitoring field for the replacement of the failed nodes. In particular, the adoption of the path selection (based on the TSP solution) performs the best for Air-R, as shown in Figure 8.
In the final analysis, we investigate how the Air-R path influences the movement distance to reduce the Air-R effort. Consequently, the Air-R replaces the failed nodes before the problem extends, which affects network sustainability. Figure 8 shows the movement average for the Air-R, which is always the lowest, most stable, and most constant when utilizing the SBR technique in both network sizes. In the SBR technique, the BS selects the closest Air-R to the sector that presents failure. The Air-R then flies to replace the failed nodes in the sectors. The highest performance is achieved, and the travel distance for Air-R is reduced.
4. Conclusions
In this study, we propose a sensor replacement technique for R-WSN using Air-R, called SBR. The BS receives recharging requests from nodes in the monitoring field, analyzes these requests, and checks which node sends numerous abnormal recharging requests. The Air-R is then sent to replace the failed nodes with new functional ones. This study aims to (i) guarantee the sustainability of the R-WSN monitoring field without affecting any part; (ii) rapidly detect the failed node in sectors on the R-WSN using the BS capabilities in processing the data, to achieve the highest performance for the replacement of the failed nodes; and (iii) minimize the Air-R movement distance through the new field-dividing mechanism that leads to the fast replacement task. The proposed solutions succeed in guaranteeing the sustainability of the R-WSN monitoring field. We believe that the proposed comparative analysis will be helpful in various uses of WSN for monitoring and collecting data about environmental activities. In our future work, we will study the performance of utilizing Air-R to deploy fully functional nodes in non-covered places in the sensing field.
Acknowledgments
This work was supported in part by the National Natural Science Foundation of China (Grants No. 61301148 and 61272061), the Fundamental Research Funds for the Central Research Funds for the Doctoral Program of Higher Education of China (No. 201301-61110002 and 20120161120019), and the Hunan Natural Science Foundation of China (No. 14-JJ7023).
Author Contributions
Sadam Alkhalidi and Zaid Al-Marhabi undertake most of this work. Dong Wang provides the instructions and helps during the design. All authors provide the help in revisions of this manuscript. All authors have read and approved the final manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Akyildiz, I.; Weilian, S.; Sankarasubramaniam, Y.; Cayirci, E. A survey on sensor networks. Comput. Netw. 2002, 40, 393–422. [Google Scholar] [CrossRef]
- Watteyne, T.; Molinaro, A.; Richichi, M.; Dohler, M. From MANET To IETF ROLL Standardization: A Paradigm Shift in WSN Routing Protocols. IEEE Commun. Surv. Tutor. 2011, 13, 688–707. [Google Scholar] [CrossRef]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor network survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Jason, H.; Sadaf, Z.; Aman, K.; Mani, S.; Vijay, R. Adaptive duty cycling for energy harvesting systems. In Proceedings of the 2006 International Symposium on Low Power Electronics and Design, Tegernsee, Germany, 4–6 October 2006. [Google Scholar]
- Aman, K.; Jason, H.; Sadaf, Z.; Mani, B.S. Power management in energy harvesting sensor networks. ACM Trans. Embed. Comput. Syst. 2007, 6. [Google Scholar] [CrossRef]
- Padberg, M.; Rinaldi, G. A branch-and-cut algorithm for the resolution of large-scale symmetric traveling salesman problems. SIAM Rev. 1991, 14, 60–100. [Google Scholar] [CrossRef]
- Michal, B.; Adam, R.; Przemyslaw, R. Wireless energy transfer for industrial applications: Theory, available solutions and perspectives. In Proceedings of the Signals and Electronic Systems (ICSES), Krakow, Poland, 5–7 September 2016; pp. 195–199. [Google Scholar]
- Xie, L.; Shi, Y.; Hou, Y.T.; Lou, W.; Sherali, H.D.; Midkiff, S.F. On renewable sensor networks with wireless energy transfer: The multi-node case. In Proceedings of the IEEE Sensor and Ad Hoc Communications and Networks (SECON), Seoul, Korea, 18–21 June 2012; pp. 10–18. [Google Scholar]
- Schurgers, C.; Srivastava, M.B. Energy efficient routing in wireless sensor networks. In Proceedings of the Communications for Network-Centric Operations: Creating the Information Force, Vienna, Austria, 28–31 October 2001; pp. 357–361. [Google Scholar]
- Gao, D.; Wu, G.; Liu, Y.; Zhang, F. Bounded end-to-end delay with transmission power control techniques for rechargeable wireless sensor networks. Int. J. Electron. Commun. 2014, 68, 395–405. [Google Scholar] [CrossRef]
- Celso, M.; Sunghee, M.; Sangkeum, L.; Dongsoo, H. Distributed Sensor Nodes Charged by Mobile Charger with Directional Antenna and by Energy Trading for Balancing. Sensors 2017, 17, 122. [Google Scholar]
- Xie, L.; Shi, J.; Hou, Y.T.; Sherali, H.D. Making sensor networks immortal: An energy-renewal approach with wireless power transfer. IEEE/ACM Trans. Netw. 2012, 20, 1748–1761. [Google Scholar] [CrossRef]
- Parikh, S.; Vokkarane, V.M.; Xing, L.; Kasilingam, D. Node-Replacement Policies to Maintain Threshold-Coverage in Wireless Sensor Networks. In Proceedings of the 16th International Conference on Computer Communications and Networks, Honolulu, HI, USA, 13–16 August 2007; pp. 760–765. [Google Scholar]
- Tong, B.; Li, Z.; Wang, G.; Zhang, W. On-Demand Node Reclamation and Replacement for Guaranteed Area Coverage in Long-Lived Sensor Networks. In Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering; Springer: Berlin/Heidelberg, Germany, 2009; Volume 22, pp. 148–166. [Google Scholar]
- Tong, B.; Li, Z.; Wang, G.; Zhang, W. Towards Reliable Scheduling Schemes for Long-lived Replaceable Sensor Networks. In Proceedings of the IEEE INFOCOM, San Diego, CA, USA, 14–19 March 2010; pp. 1–9. [Google Scholar]
- Falcon, R.; Li, X.; Nayak, A.; Stojmenovic, I. The one-commodity traveling salesman problem with selective pickup and delivery: An ant colony approach. In Proceedings of the IEEE Congress on Computational Intelligence Evolutionary Computation (CEC), Barcelona, Spain, 18–23 July 2010; pp. 1–8. [Google Scholar]
- Mei, Y.; Xian, C.; Das, S.; Hu, Y.C.; Lu, Y.-H. Sensor replacement using mobile robots. Comput. Commun. 2007, 30, 2615–2626. [Google Scholar] [CrossRef]
- Kalypso, M.; Dimitrios, Z.; Tahiry, R. Node Discovery and Replacement Using Mobile Robot. In Proceedings of the 4th International Conference on Ad Hoc Networks, Paris, France, 16–17 October 2012. [Google Scholar]
- Nguyen, N.T.; Liu, B.H.; Pham, V.T.; Huang, C.Y. Network under Limited Mobile Devices: A New Technique for Mobile Charging Scheduling With Multiple Sinks. IEEE Syst. J. 2016, 99, 1–11. [Google Scholar] [CrossRef]
- Liu, B.-H.; Nguyen, N.-T.; Pham, V.-T.; Lin, Y.-X. Novel methods for energy charging and data collection in wireless rechargeable sensor networks. Int. J. Commun. Syst. 2017, 30, 3050. [Google Scholar] [CrossRef]
- Angelopoulos, C.M.; Nikoletseas, S.; Raptis, T.P. Efficient energy management in wireless rechargeable sensor networks. In Proceedings of the 15th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems (MSWiM), New York, NY, USA, 21–25 October 2012; pp. 309–316. [Google Scholar]
- Mao, S.; Hou, Y. BeamStar: An edge-based approach to routing in wireless sensor networks. IEEE Trans. Mob. Comput. 2007, 6, 1284–1296. [Google Scholar] [CrossRef]
- Li, W.H.; Yang, C.Y. A cluster-based data routing for wireless sensor networks. In Proceedings of the International Conference on Algorithms and Architectures for Parallel Processing, Taipei, Taiwan, 8–11 June 2009; Volume 5574, pp. 129–136. [Google Scholar]
- Fahlstrom, P.; Gleason, T. Introduction to UAV Systems; John Wiley & Sons: Chichester, UK, 2012. [Google Scholar]
- He, L.; Gu, Y.; Pan, J.; Zhu, T. On-demand charging in wireless sensor networks: Theories and applications. In Proceedings of the 2013 IEEE 10th International Conference on Mobile Ad-Hoc and Sensor Systems, Washington, DC, USA, 14–16 October 2013; pp. 28–36. [Google Scholar]
- Heinzelman, W.R.; Chandrakasan, A.; Balakrishnan, H. Energy-efficient communication protocol for wireless microsensor networks. In Proceedings of the 33rd Hawaii International Conference on System Sciences (HICSS), Washington, DC, USA, 4–7 January 2000. [Google Scholar]
- Kang, B.; Ceder, G. Battery materials for ultrafast charging and discharging. Nature 2009, 458, 190–193. [Google Scholar] [CrossRef] [PubMed]
- Zou, T.; Lin, S.; Feng, Q.; Chen, Y. Energy-Efficient Control with Harvesting Predictions for Solar-Powered Wireless Sensor Networks. Sensors 2016, 16, 53. [Google Scholar] [CrossRef] [PubMed]
- Trasviña-Moreno, C.A.; Blasco, R.; Marco, Á.; Casas, R.; Trasviña-Castro, A. Unmanned Aerial Vehicle Based Wireless Sensor Network for Marine-Coastal Environment Monitoring. Sensors 2017, 17, 460. [Google Scholar] [CrossRef] [PubMed]
- John-Paul, O.; Sebastian, E.; Amy, B.; Baoliang, Z.; Carrick, D. Autonomous Aerial Water Sampling. In Field and Service Robotics; Springer International Publishing: Cham, Switzerland, 2013; pp. 137–151. [Google Scholar]
Figure 1.
Network design technique with jth rings of ith sectors. Each ring has an equal sector area. These equally spaced sectors are used to form even-sized clusters in the network.
Figure 1.
Network design technique with jth rings of ith sectors. Each ring has an equal sector area. These equally spaced sectors are used to form even-sized clusters in the network.
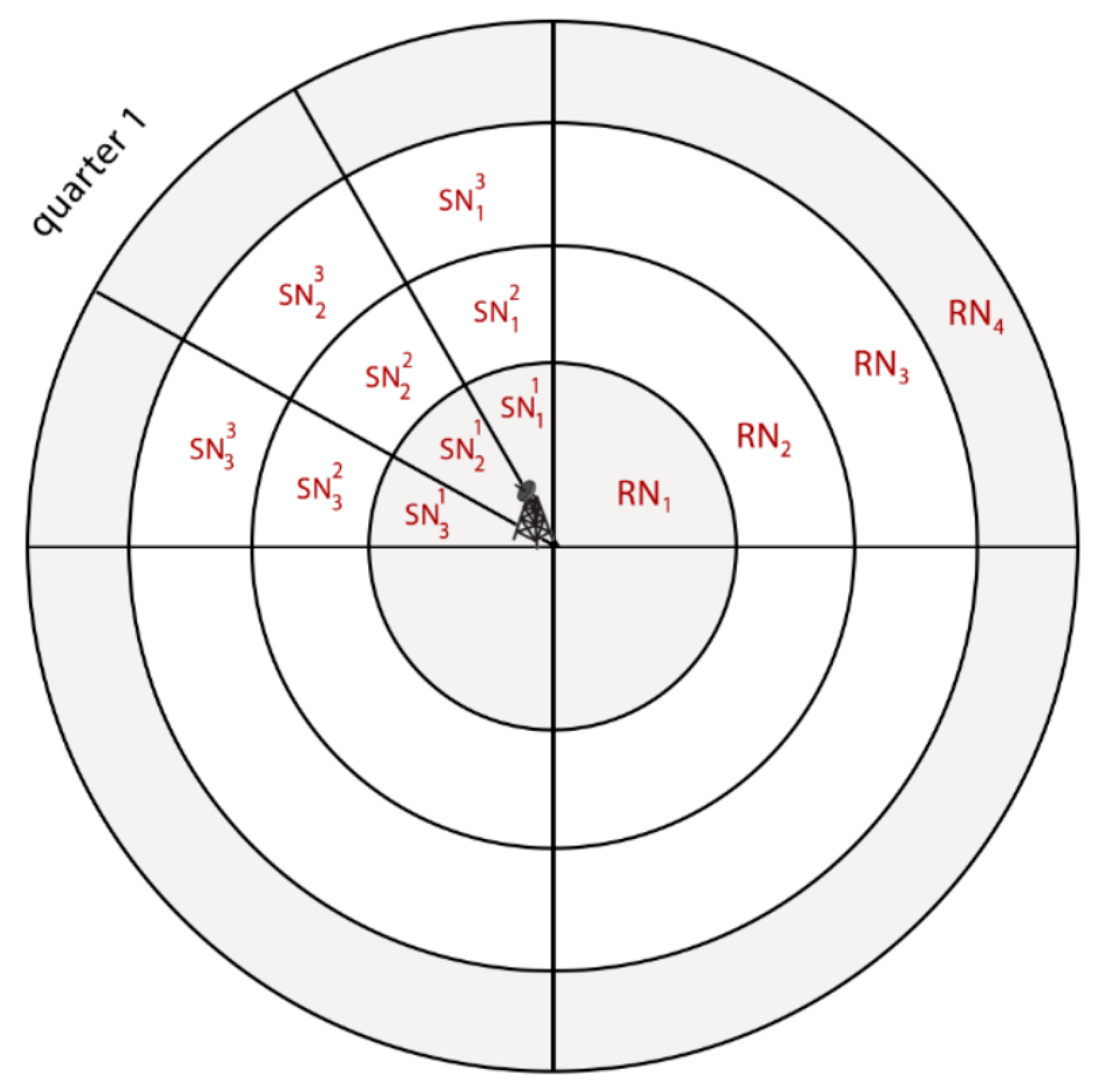
Figure 2.
Replacement prose flowchart.
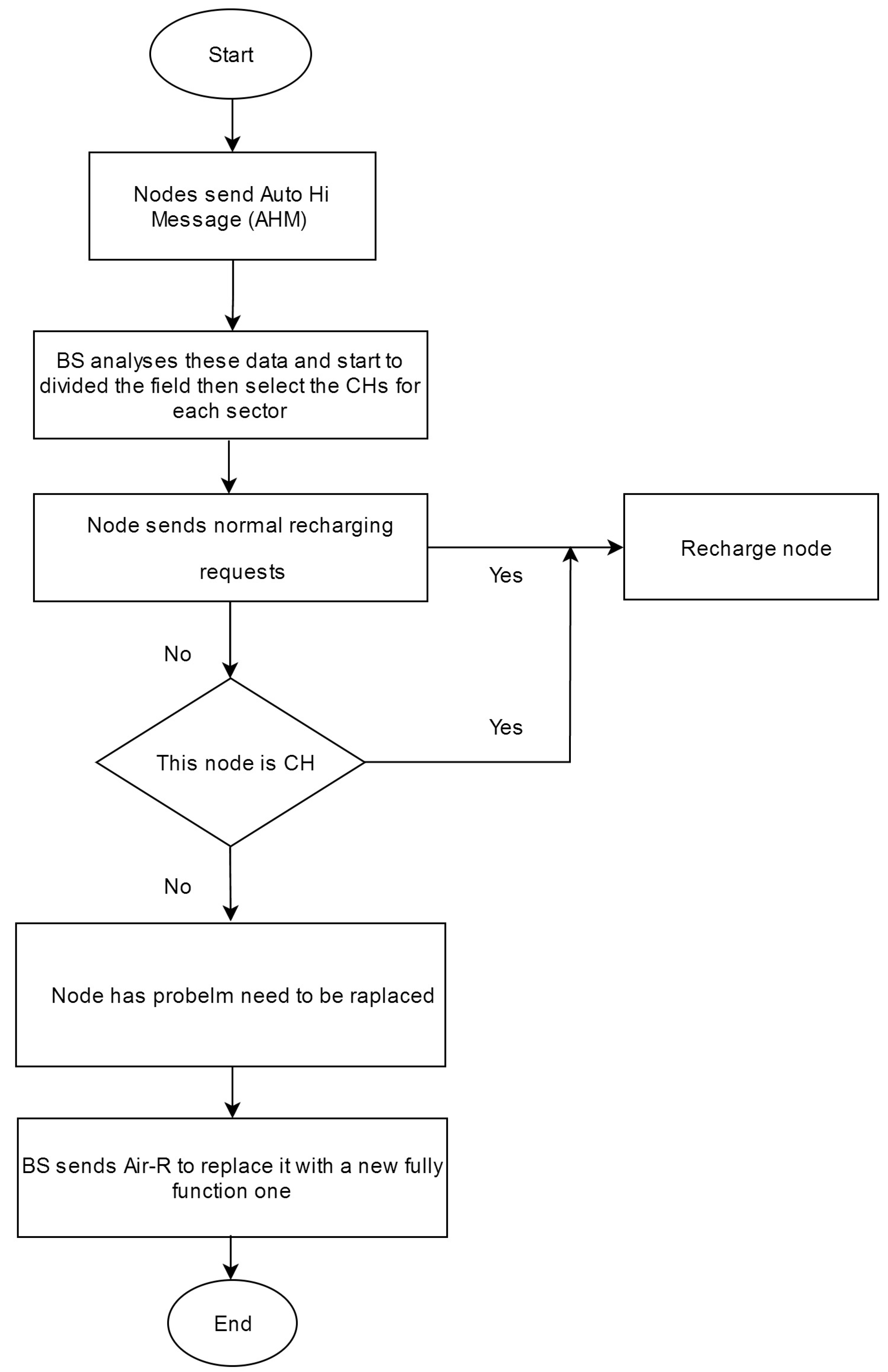
Figure 3.
Air-R unloading fully functional R-WSN.
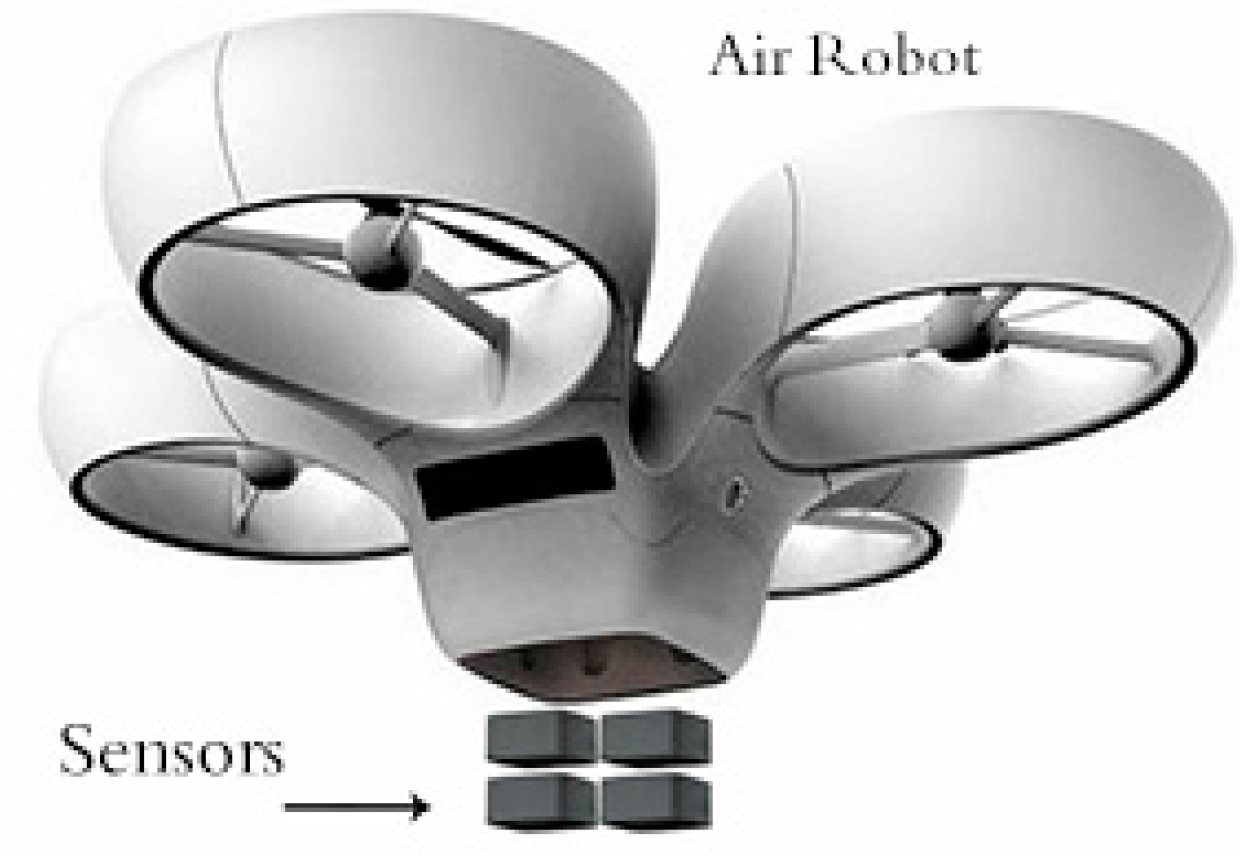
Figure 4.
Air-R scenario in detecting and replacing failed sensors and unloading new ones. (a) normal R-WSN; (b) some failed nodes detected; (c) Air-R replacing failed nodes.
Figure 4.
Air-R scenario in detecting and replacing failed sensors and unloading new ones. (a) normal R-WSN; (b) some failed nodes detected; (c) Air-R replacing failed nodes.
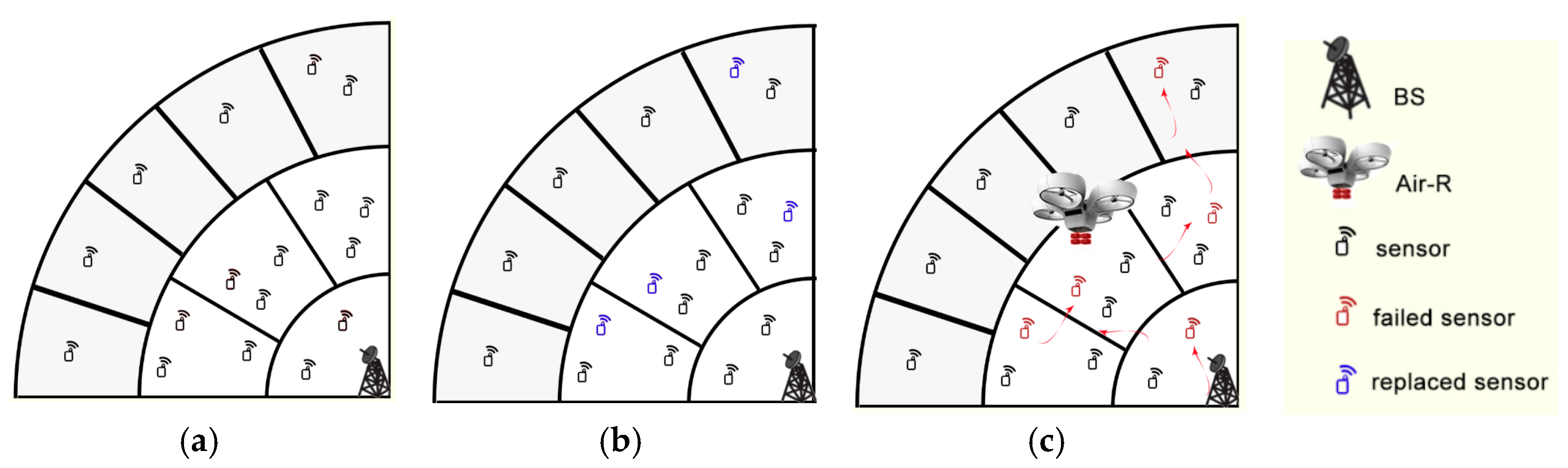
Figure 5.
Network sustainability for a small network from 10 to 100 nodes.
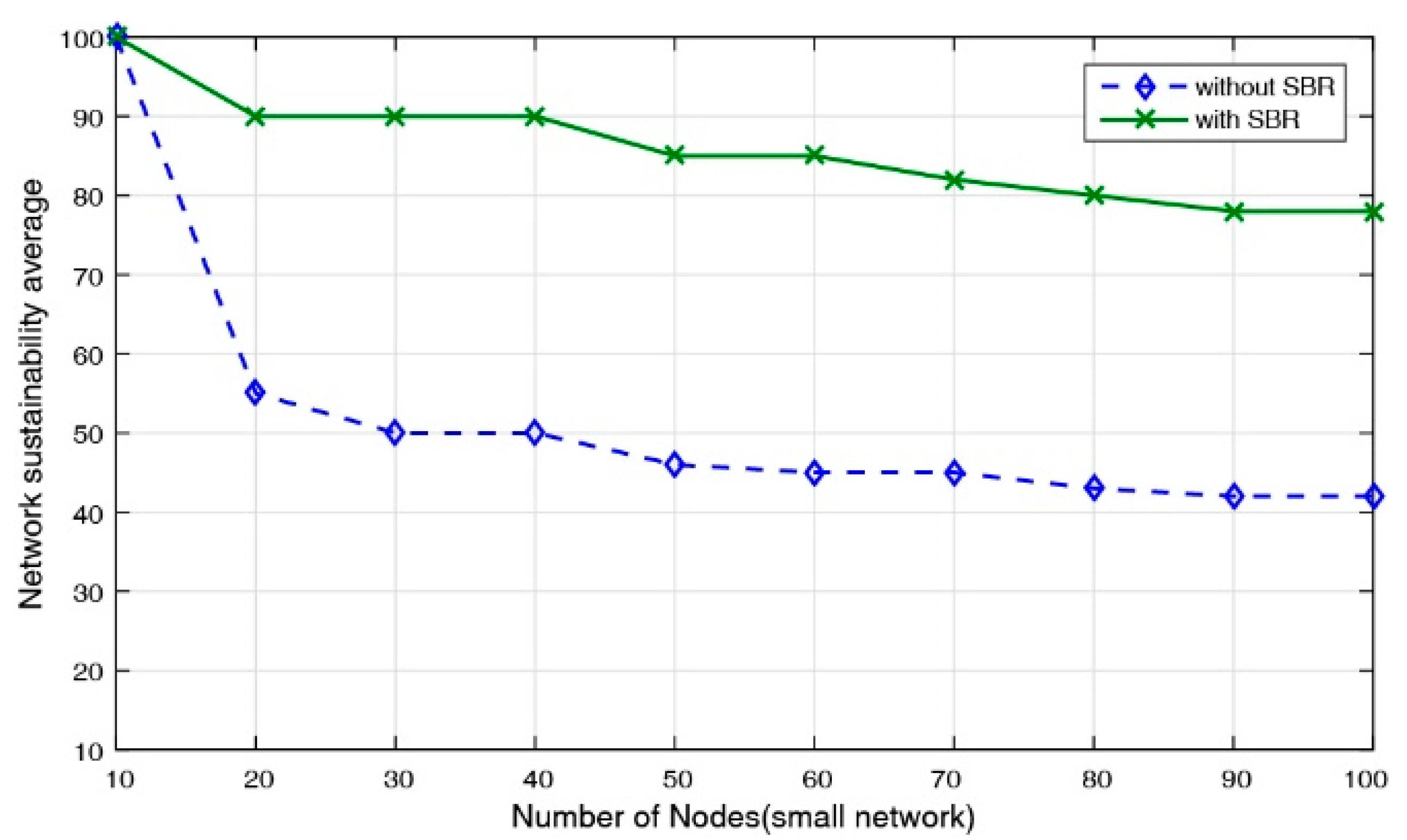
Figure 6.
Network sustainability for a large network from 100 to 1000 nodes.
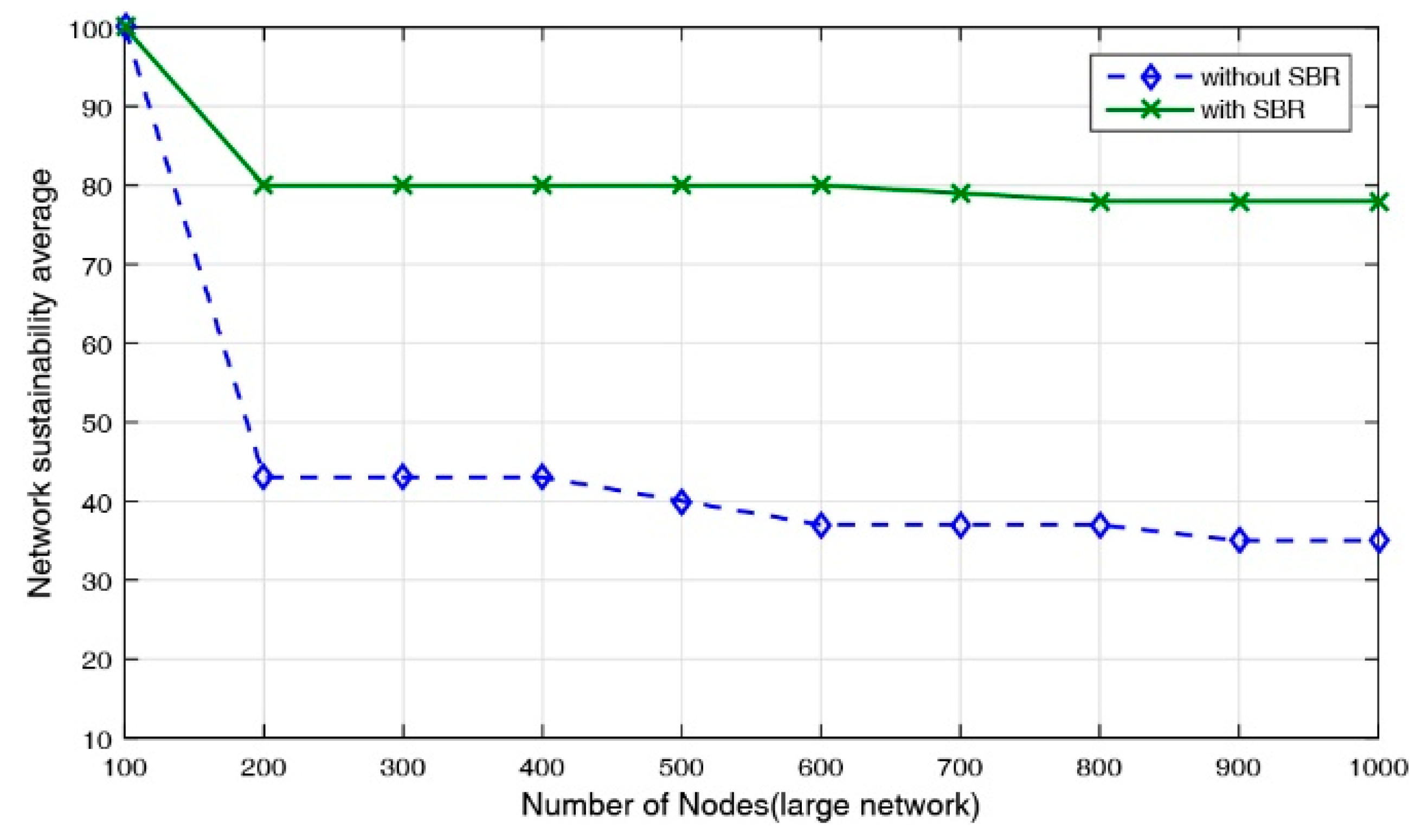
Figure 7.
Network statistics’ average for small and large networks utilizing the SBR technique: (a) finding failed nodes in a small network; (b) finding failed nodes in a large network; (c) successful node replacement in a small network; (d) successful node replacement in a large network.
Figure 7.
Network statistics’ average for small and large networks utilizing the SBR technique: (a) finding failed nodes in a small network; (b) finding failed nodes in a large network; (c) successful node replacement in a small network; (d) successful node replacement in a large network.
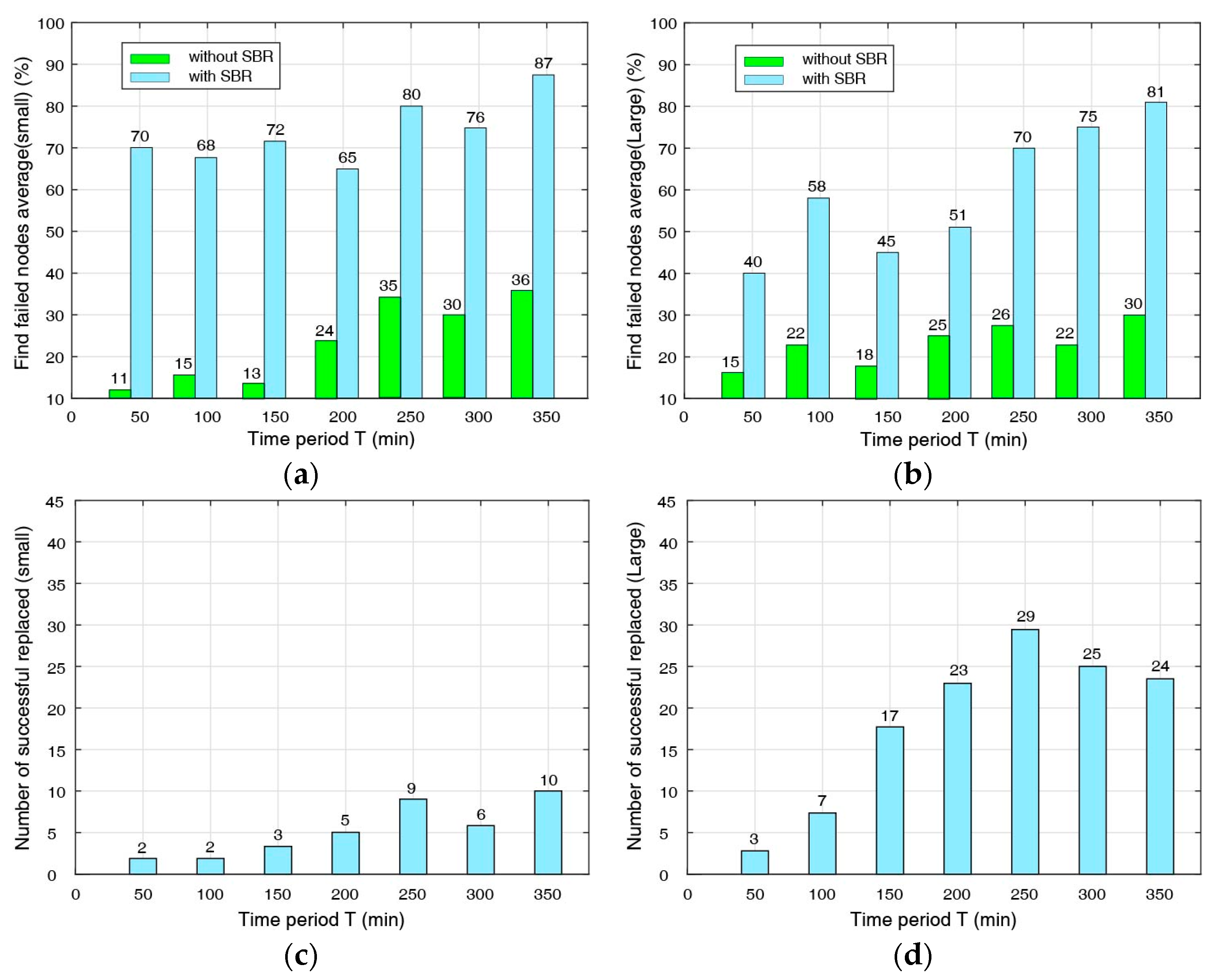
Figure 8.
Average movement distance of the Air-R for small and large networks.
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Alkhalidi, S.M.; Wang, D.; Al-Marhabi, Z.A. Adopting Sector-Based Replacement (SBR) and Utilizing Air-R to Achieve R-WSN Sustainability. Information 2017, 8, 70. https://doi.org/10.3390/info8020070
AMA Style
Alkhalidi SM, Wang D, Al-Marhabi ZA. Adopting Sector-Based Replacement (SBR) and Utilizing Air-R to Achieve R-WSN Sustainability. Information. 2017; 8(2):70. https://doi.org/10.3390/info8020070
Chicago/Turabian StyleAlkhalidi, Sadam M., Dong Wang, and Zaid A. Al-Marhabi. 2017. "Adopting Sector-Based Replacement (SBR) and Utilizing Air-R to Achieve R-WSN Sustainability" Information 8, no. 2: 70. https://doi.org/10.3390/info8020070
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.