
Improving the Signal-to-Noise Ratio of Axial Displacement Measurements of Microspheres Based on Compound Digital Holography Microscopy Combined with the Reconstruction Centering Method
Abstract
:1. Introduction
2. Methodology
2.1. Analysis and Simulation
2.2. Reconstruction Centering Method (RCM)
2.3. Axial Displacement of Adhered Microspheres
3. Apparatus and Experiments
3.1. Apparatus
3.2. Experiments on Sample Microspheres
3.3. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, H.; Fu, H.; Zhu, X.; Cong, P.; Nakamura, F.; Yan, J. Improved High-Force Magnetic Tweezers for Stretching and Refolding of Proteins and Short DNA. Biophys. J. 2011, 100, 517–523. [Google Scholar] [CrossRef] [PubMed]
- Chen, D.; Wang, L.; Luo, X.; Xie, H.; Chen, X. Resolution and Contrast Enhancement for Lensless Digital Holographic Microscopy and Its Application in Biomedicine. Photonics 2022, 9, 358. [Google Scholar] [CrossRef]
- Scharnowski, S.; Kähler, C.J. Particle image velocimetry-Classical operating rules from today’s perspective. Opt. Lasers Eng. 2020, 135, 106185. [Google Scholar] [CrossRef]
- Beresh, S.J. Time-resolved particle image velocimetry. Meas. Sci. Technol. 2021, 32, 102003. [Google Scholar] [CrossRef]
- Flewellen, J.L.; Minoughan, S.; Garcia, I.L.; Tolar, P. Digital holography-based 3D particle localization for single-molecule tweezer techniques. Biophys. J. 2022, 121, 2538–2549. [Google Scholar] [CrossRef] [PubMed]
- Go, T.; Kim, J.; Lee, S.J. Three-dimensional volumetric monitoring of settling particulate matters on a leaf using digital in-line holographic microscopy. J. Hazard. Mater. 2020, 404, 124116. [Google Scholar] [CrossRef]
- Kim, J.; Go, T.; Lee, S.J. Volumetric monitoring of airborne particulate matter concentration using smartphone-based digital holographic microscopy and deep learning. J. Hazard. Mater. 2021, 418, 126351. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Guo, S.; Wang, D.; Lin, Q.; Rong, L.; Zhao, J. Resolution enhancement phase-contrast imaging by microsphere digital holography. Opt. Commun. 2016, 366, 81–87. [Google Scholar] [CrossRef]
- Wang, Z.; Guo, W.; Li, L.; Luk’Yanchuk, B.; Khan, A.; Liu, Z.; Chen, Z.; Hong, M. Optical virtual imaging at 50nm lateral resolution with a white-light nanoscope. Nat. Commun. 2011, 2, 218. [Google Scholar] [CrossRef]
- Panahi, M.; Jamali, R.; Rad, V.F.; Khorasani, M.; Darudi, A.; Moradi, A.-R. 3D monitoring of the surface slippage effect on micro-particle sedimentation by digital holographic microscopy. Sci. Rep. 2021, 11, 129161. [Google Scholar] [CrossRef]
- Zeng, Y.; Chang, X.; Lei, H.; Hu, X.; Hu, X. Three-dimensional particle tracking by pixel difference method of optical path length based on digital holographic microscopy. J. Vac. Sci. Technol. B 2015, 33, 051808. [Google Scholar] [CrossRef]
- Middleton, C.; Hannel, M.D.; Hollingsworth, A.D.; Pine, D.J.; Grier, D.G. Optimizing the Synthesis of Monodisperse Colloidal Spheres Using Holographic Particle Characterization. Langmuir 2019, 35, 6602–6609. [Google Scholar] [CrossRef] [PubMed]
- Patel, N.; Rawat, S.; Joglekar, M.; Chhaniwal, V.; Dubey, S.K.; O’Connor, T.; Javidi, B.; Anand, A. Compact and low-cost instrument for digital holographic microscopy of immobilized micro-particles. Opt. Lasers Eng. 2020, 137, 106397. [Google Scholar] [CrossRef]
- O’brien, M.J.; Grier, D.G. Above and beyond: Holographic tracking of axial displacements in holographic optical tweezers. Opt. Express 2019, 27, 25375–25383. [Google Scholar] [CrossRef] [PubMed]
- Altman, L.E.; Quddus, R.; Cheong, F.C.; Grier, D.G. Holographic characterization and tracking of colloidal dimers in the effective-sphere approximation. Soft Matter 2021, 17, 2695–2703. [Google Scholar] [CrossRef] [PubMed]
- Odete, M.A.; Cheong, F.C.; Winters, A.; Elliott, J.J.; Philips, L.A.; Grier, D.G. The role of the medium in the effective-sphere interpretation of holographic particle characterization data. Soft Matter 2019, 16, 891–898. [Google Scholar] [CrossRef] [PubMed]
- Sciacchitano, A. Uncertainty quantification in particle image velocimetry. Meas. Sci. Technol. 2019, 30, 092001. [Google Scholar] [CrossRef]
- Lee, S.J.; Yoon, G.Y.; Go, T. Deep learning-based accurate and rapid tracking of 3D positional information of microparticles using digital holographic microscopy. Exp. Fluids 2019, 60, 170. [Google Scholar] [CrossRef]
- Lagemann, C.; Lagemann, K.; Mukherjee, S.; Schröder, W. Deep recurrent optical flow learning for particle image velocimetry data. Nat. Mach. Intell. 2021, 3, 641–651. [Google Scholar] [CrossRef]
- Wu, Y.; Wu, J.; Jin, S.; Cao, L.; Jin, G. Dense-U-net: Dense encoder–decoder network for holographic imaging of 3D particle fields. Opt. Commun. 2021, 493, 126970. [Google Scholar] [CrossRef]
- Yuan, H.; Zhang, X.; Wang, F.; Xiong, R.; Wang, W.; Li, S.; Xu, M. Accurate reconstruction for the measurement of tilt surfaces with digital holography. Opt. Commun. 2021, 496, 127135. [Google Scholar] [CrossRef]
- Shangraw, M.; Ling, H. Separating twin images in digital holographic microscopy using weak scatterers. Appl. Opt. 2021, 60, 626–634. [Google Scholar] [CrossRef] [PubMed]
- Guo, R.; Barnea, I.; Shaked, N.T. Low-Coherence Shearing Interferometry With Constant Off-Axis Angle. Front. Phys. 2021, 8, 611679. [Google Scholar] [CrossRef]
- Zeng, Y.; Chang, X.; Lei, H.; Hu, X.; Hu, X. Characteristics analysis of digital image-plane holographic microscopy. Scanning 2015, 38, 288–296. [Google Scholar] [CrossRef] [PubMed]
- Zeng, Y.; Lu, J.; Chang, X.; Liu, Y.; Hu, X.; Su, K.; Chen, X. A Method to Improve the Imaging Quality in Dual-Wavelength Digital Holographic Microscopy. Scanning 2018, 2018, 4582590. [Google Scholar] [CrossRef]
- Zeng, Y.; Liu, Y.; Yang, F.; Lu, J.; Chang, X.; Hu, X. Optimization of Phase Noise in Digital Holographic Microscopy. In Proceedings of the 2018 IEEE International Conference on Manipulation, Manufacturing and Measurement on the Nanoscale (3M-NANO), Hangzhou, China, 13–17 August 2018; pp. 382–385. [Google Scholar] [CrossRef]
- Zeng, Y.; Lu, J.; Hu, X.; Chang, X.; Liu, Y.; Zhang, X.; Wang, Y.; Sun, Q. Axial displacement measurement with high resolution of particle movement based on compound digital holographic microscopy. Opt. Commun. 2020, 475, 126300. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frames | Result of CDHM/nm | Result of CDHM Combined with RCM/nm | Displacement of Stage/nm |
|---|---|---|---|
| 2–62 | 4.74 ± 0.68 | 4.83 ± 0.38 | −5 |
| 66–126 | −0.01 ± 0.73 | −0.06 ± 0.51 | +5 |
| 130–190 | 5.02 ± 0.78 | 4.94 ± 0.43 | −5 |
| 194–254 | −0.09 ± 0.8 | 0.11 ± 0.49 | +2 |
| 258–318 | 1.73 ± 0.72 | 1.82 ± 0.37 | −2 |
| 322–382 | −0.03 ± 0.81 | −0.11 ± 0.49 | +2 |
| 386–446 | 1.87 ± 0.71 | 2.04 ± 0.46 | −2 |
| 450–510 | −0.03 ± 0.7 | −0.13 ± 0.47 | +1 |
| 514–574 | 0.51 ± 0.75 | 0.75 ± 0.38 | −1 |
| 578–638 | −0.15 ± 0.69 | −0.11 ± 0.51 | +1 |
| 642–702 | 0.17 ± 0.78 | 0.2 ± 0.35 |
| Frames | Result of CDHM/nm | Result of CDHM Combined with RCM/nm | Displacement of Stage/nm |
|---|---|---|---|
| 2–45 | 9.82 ± 0.7 | 9.76 ± 0.43 | −10 |
| 49–92 | −0.14 ± 0.94 | −0.03 ± 0.5 | +5 |
| 96–139 | 4.69 ± 0.8 | 4.9 ± 0.47 | −5 |
| 143–186 | 0.18 ± 0.78 | 0.04 ± 0.51 | +4 |
| 190–233 | 4 ± 0.76 | 3.86 ± 0.56 | −4 |
| 237–280 | 0.04 ± 0.84 | −0.14 ± 0.52 | +4 |
| 284–327 | 3.48 ± 0.68 | 3.72 ± 0.49 | −4 |
| 331–374 | −0.15 ± 0.92 | 0.03 ± 0.53 | +3 |
| 378–421 | 1.45 ± 0.77 | 1.37 ± 0.5 | −3 |
| 425–468 | −0.16 ± 0.92 | −0.1 ± 0.49 | +3 |
| 472–515 | 1.16 ± 0.77 | 1.3 ± 0.41 |
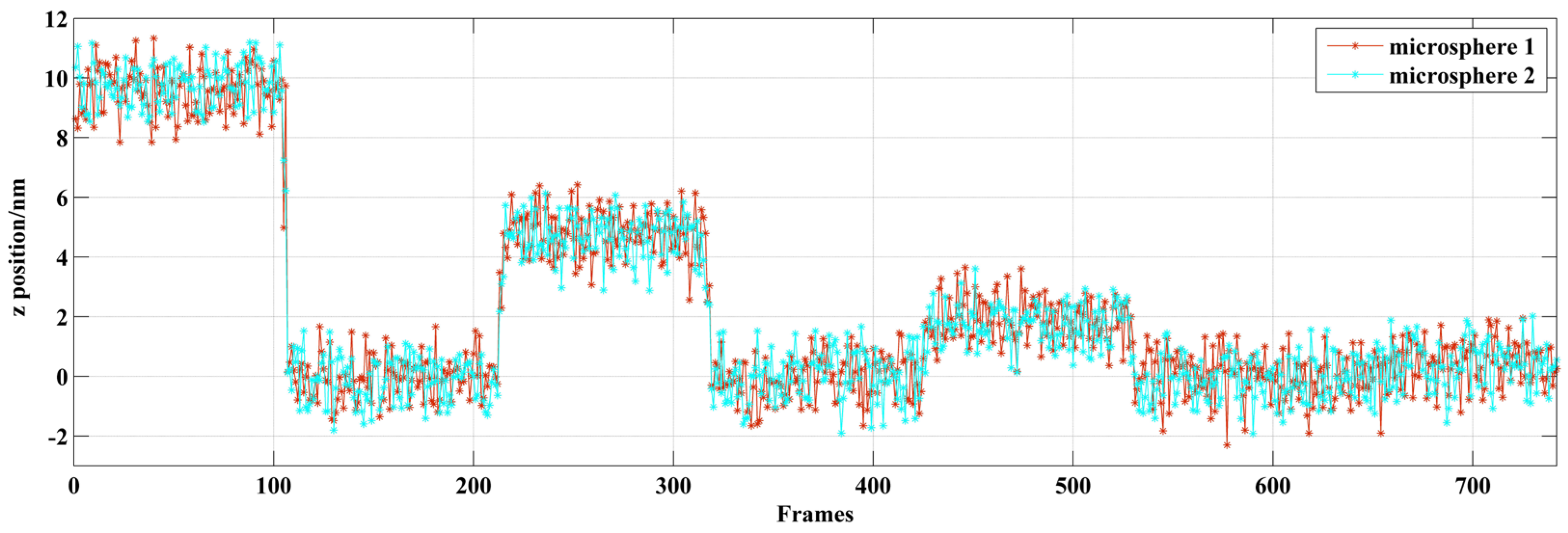
| Frames | Result of Microsphere 1 | Result of Microsphere 2 | Displacement of Stage/nm |
|---|---|---|---|
| 2–104 | 9.59 ± 0.8 | 9.76 ± 0.7 | −10 |
| 108–210 | −0.05 ± 0.72 | −0.12 ± 0.76 | +5 |
| 214–316 | 4.81 ± 0.78 | 4.66 ± 0.77 | −5 |
| 320–422 | −0.06 ± 0.73 | 0.02 ± 0.83 | +2 |
| 426–528 | 1.88 ± 0.74 | 1.76 ± 0.68 | −2 |
| 532–634 | −0.02 ± 0.81 | −0.17 ± 0.74 | +1 |
| 638–740 | 0.38 ± 0.77 | 0.33 ± 0.78 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, Y.; Guo, Q.; Hu, X.; Lu, J.; Fan, X.; Wu, H.; Xu, X.; Xie, J.; Ma, R. Improving the Signal-to-Noise Ratio of Axial Displacement Measurements of Microspheres Based on Compound Digital Holography Microscopy Combined with the Reconstruction Centering Method. Sensors 2024, 24, 2723. https://doi.org/10.3390/s24092723
Zeng Y, Guo Q, Hu X, Lu J, Fan X, Wu H, Xu X, Xie J, Ma R. Improving the Signal-to-Noise Ratio of Axial Displacement Measurements of Microspheres Based on Compound Digital Holography Microscopy Combined with the Reconstruction Centering Method. Sensors. 2024; 24(9):2723. https://doi.org/10.3390/s24092723
Chicago/Turabian StyleZeng, Yanan, Qihang Guo, Xiaodong Hu, Junsheng Lu, Xiaopan Fan, Haiyun Wu, Xiao Xu, Jun Xie, and Rui Ma. 2024. "Improving the Signal-to-Noise Ratio of Axial Displacement Measurements of Microspheres Based on Compound Digital Holography Microscopy Combined with the Reconstruction Centering Method" Sensors 24, no. 9: 2723. https://doi.org/10.3390/s24092723