
An Accurate and Fault-Tolerant Target Positioning System for Buildings Using Laser Rangefinders and Low-Cost MEMS-Based MARG Sensors

Abstract
:1. Introduction
2. Literature Review
2.1. Target Tracking/Positioning Based on Sensor Fusion
2.2. MARG-Based AHRS Algorithms
2.3. Laser Aiding Approaches
2.4. Sensor Fusion Algorithms
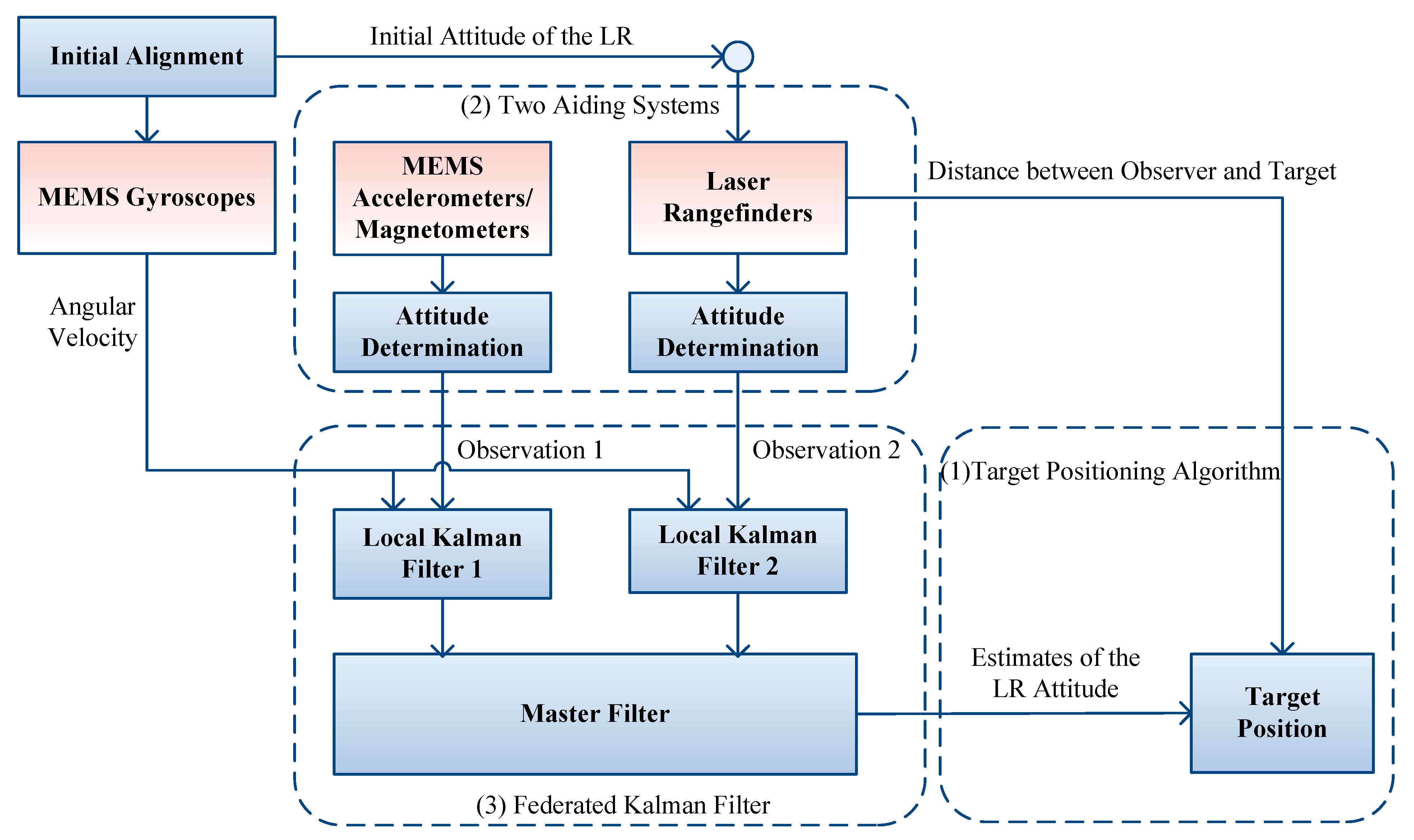
3. Overall Design of the Target Positioning System

4. Target Positioning Algorithm and Aiding Systems
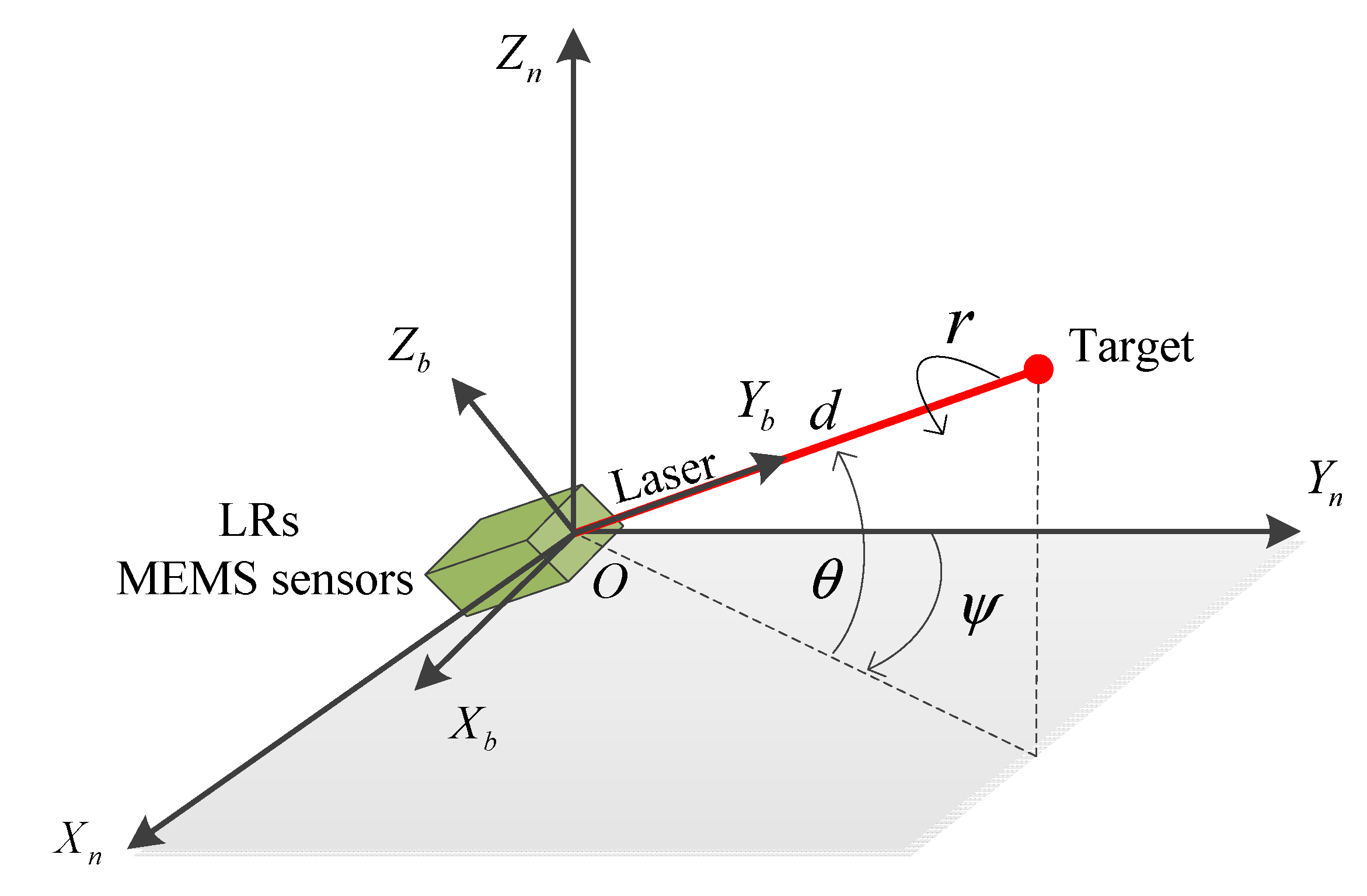
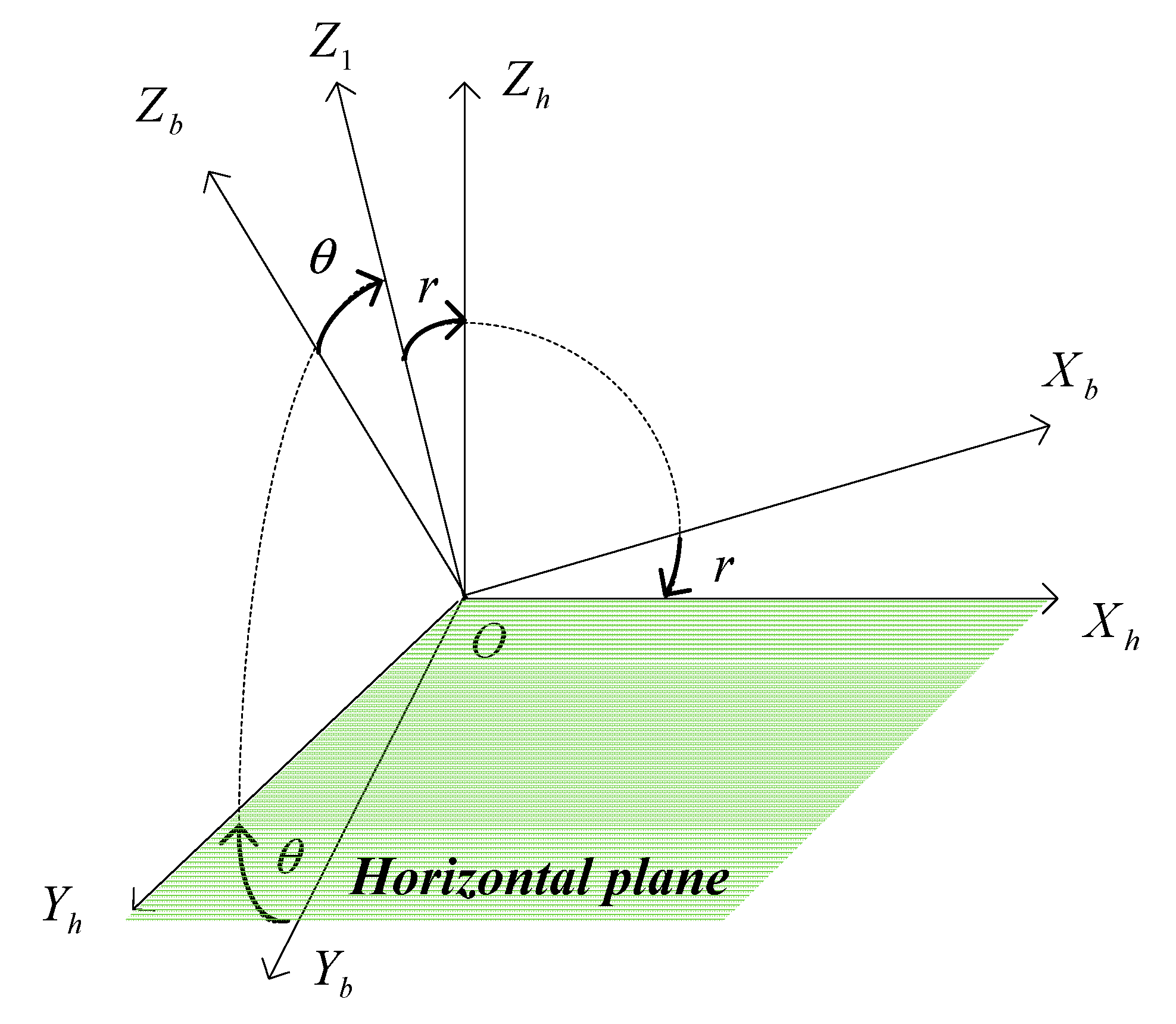
4.1. Target Positioning Algorithm

4.2. Aiding Systems for Attitude Determination
4.2.1. Accelerometer/Magnetometer Aiding System

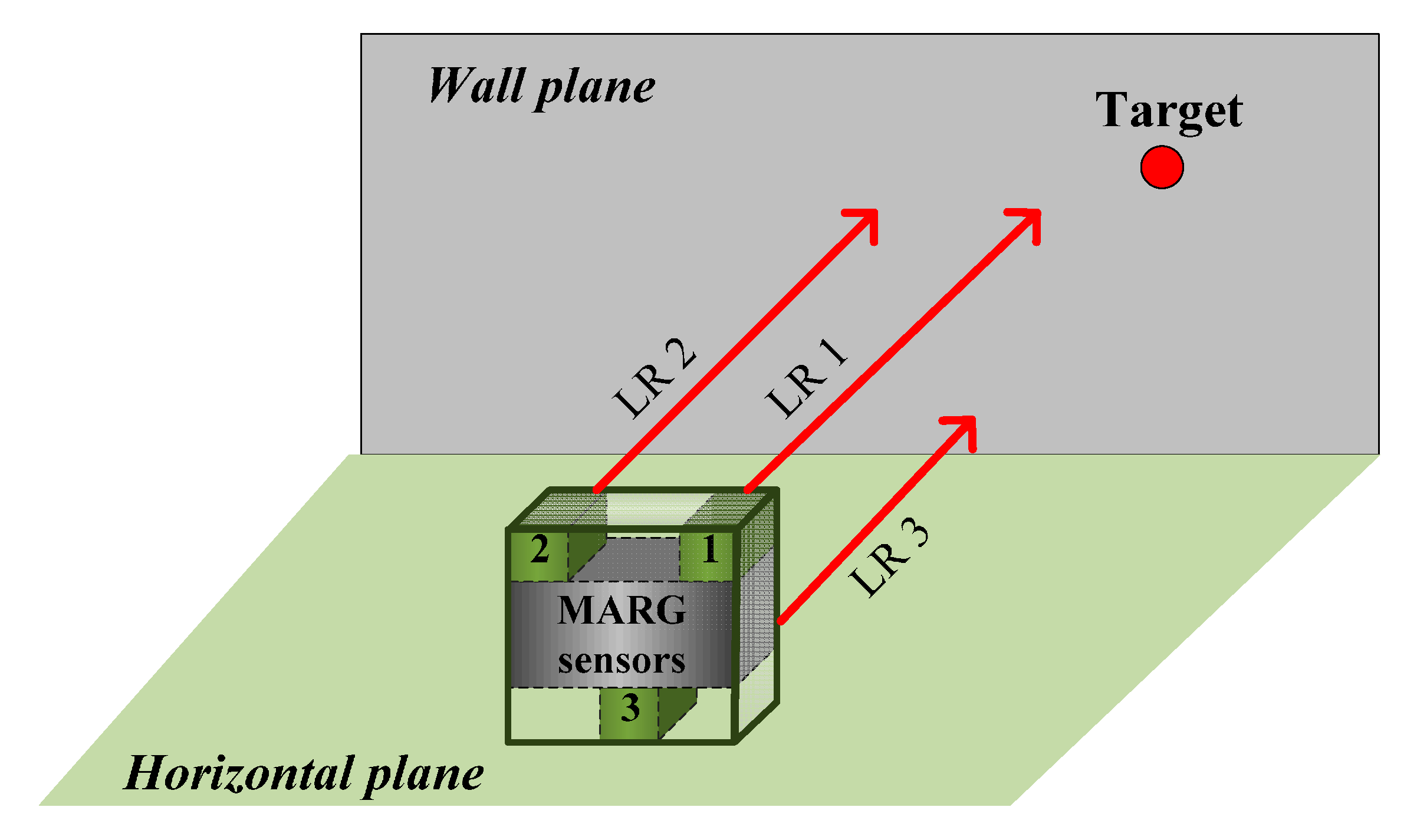
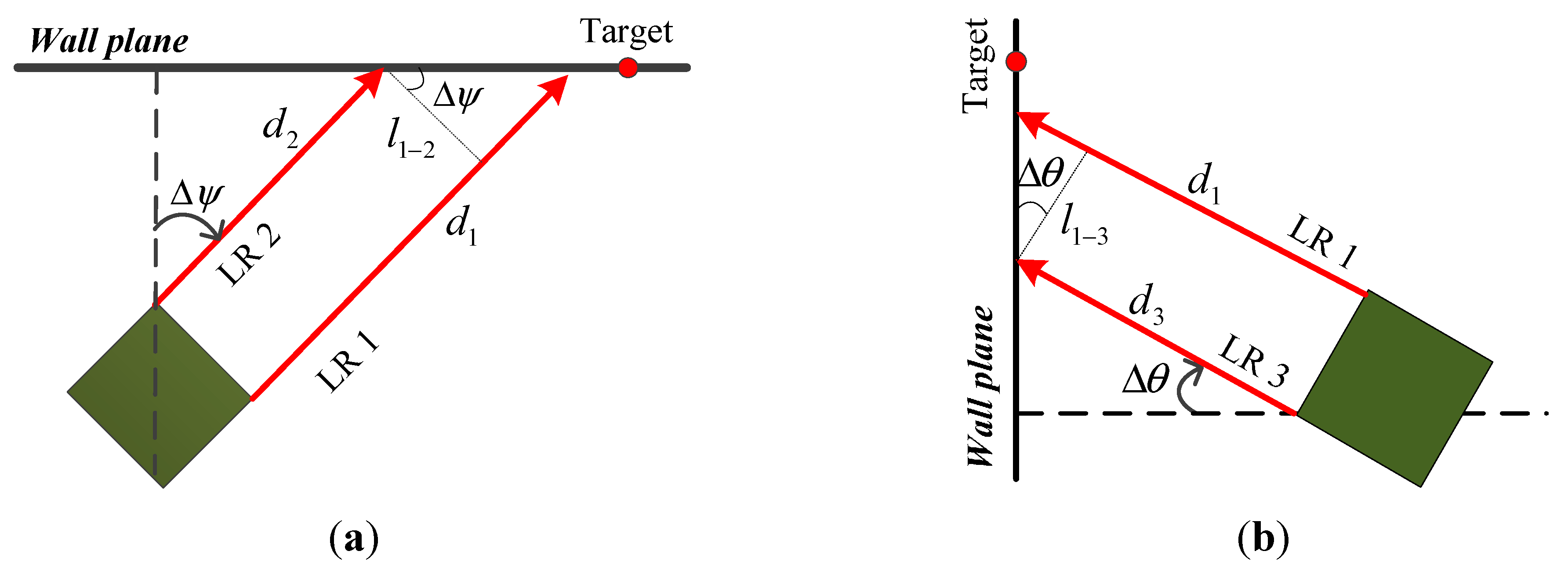
4.2.2. Laser Rangefinder Aiding System




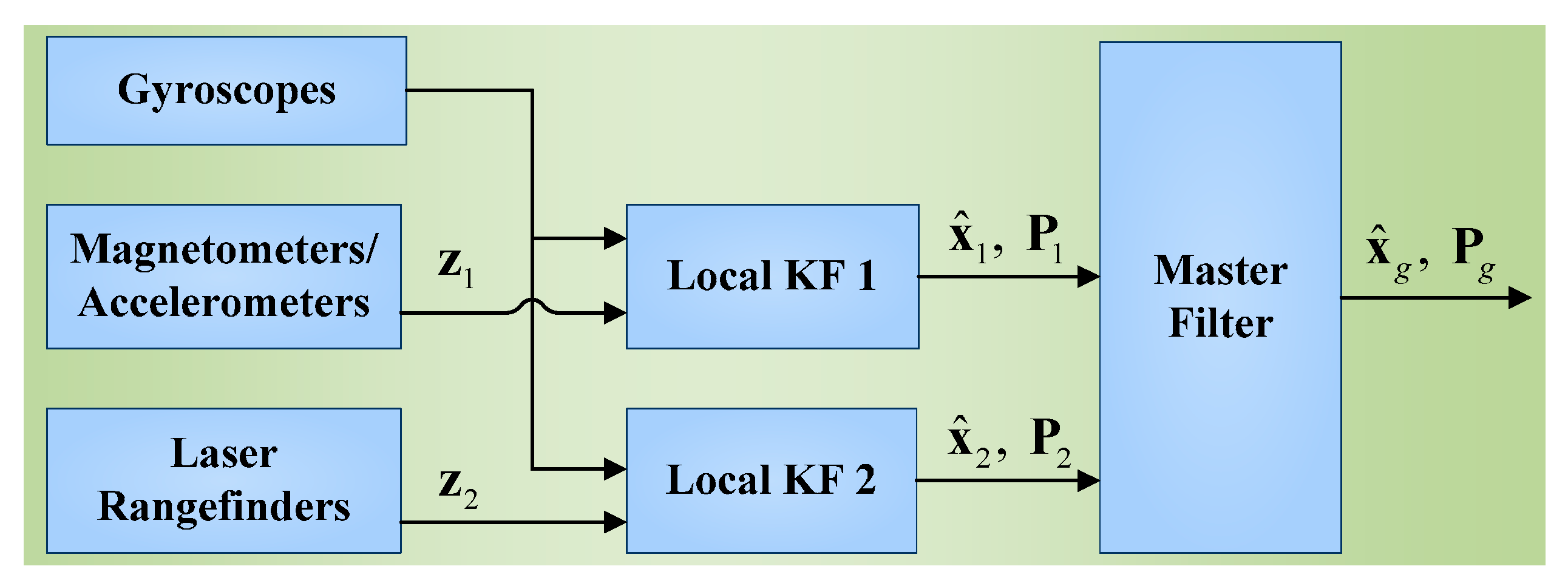
5. Design of the Federated Kalman Filter

5.1. Local Kalman Filters
5.1.1. Dynamic Models
5.1.2. Observation Models
5.2. FKF Fusion
6. Simulation and Experimental Results
6.1. Simulation Results
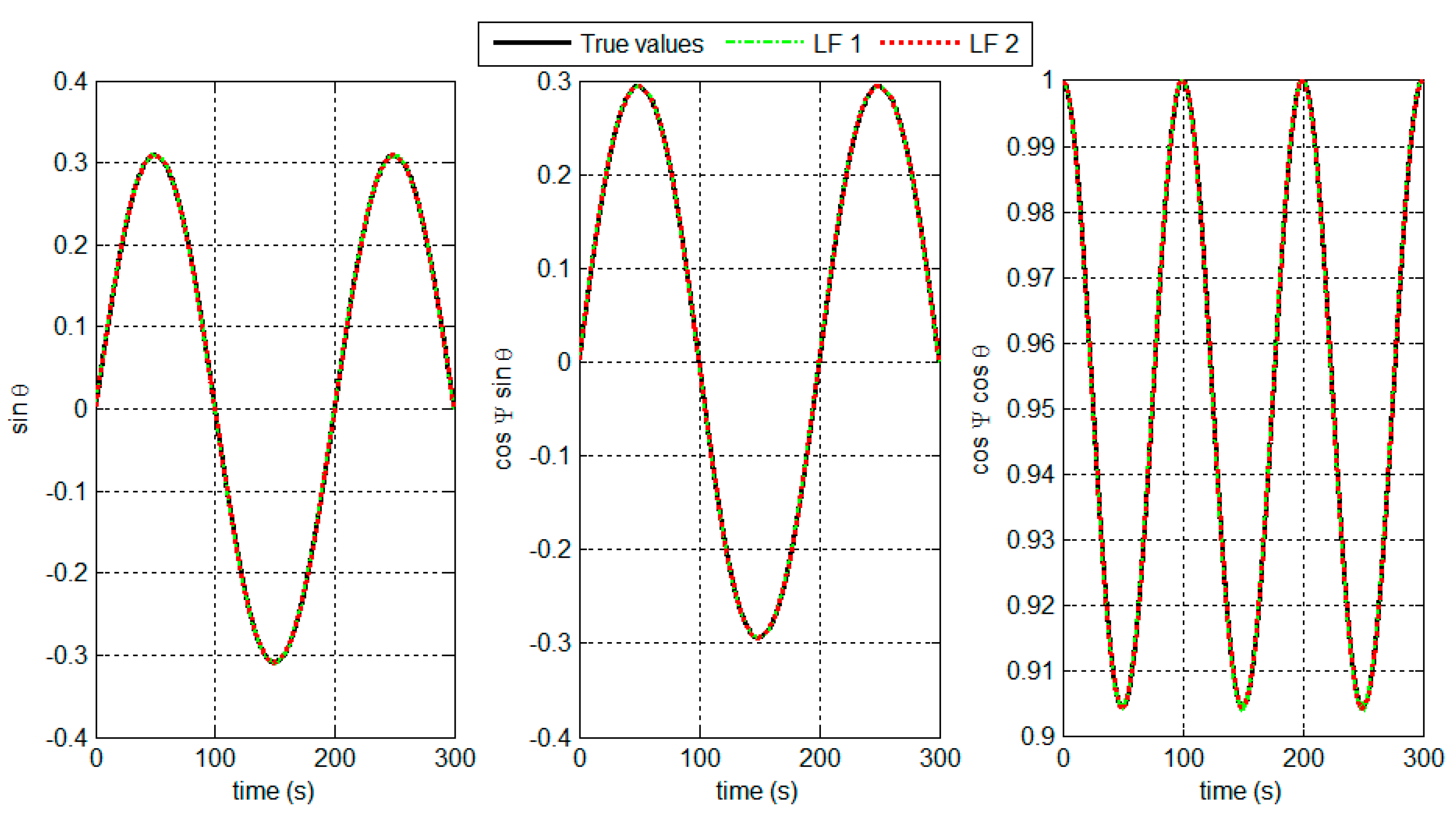
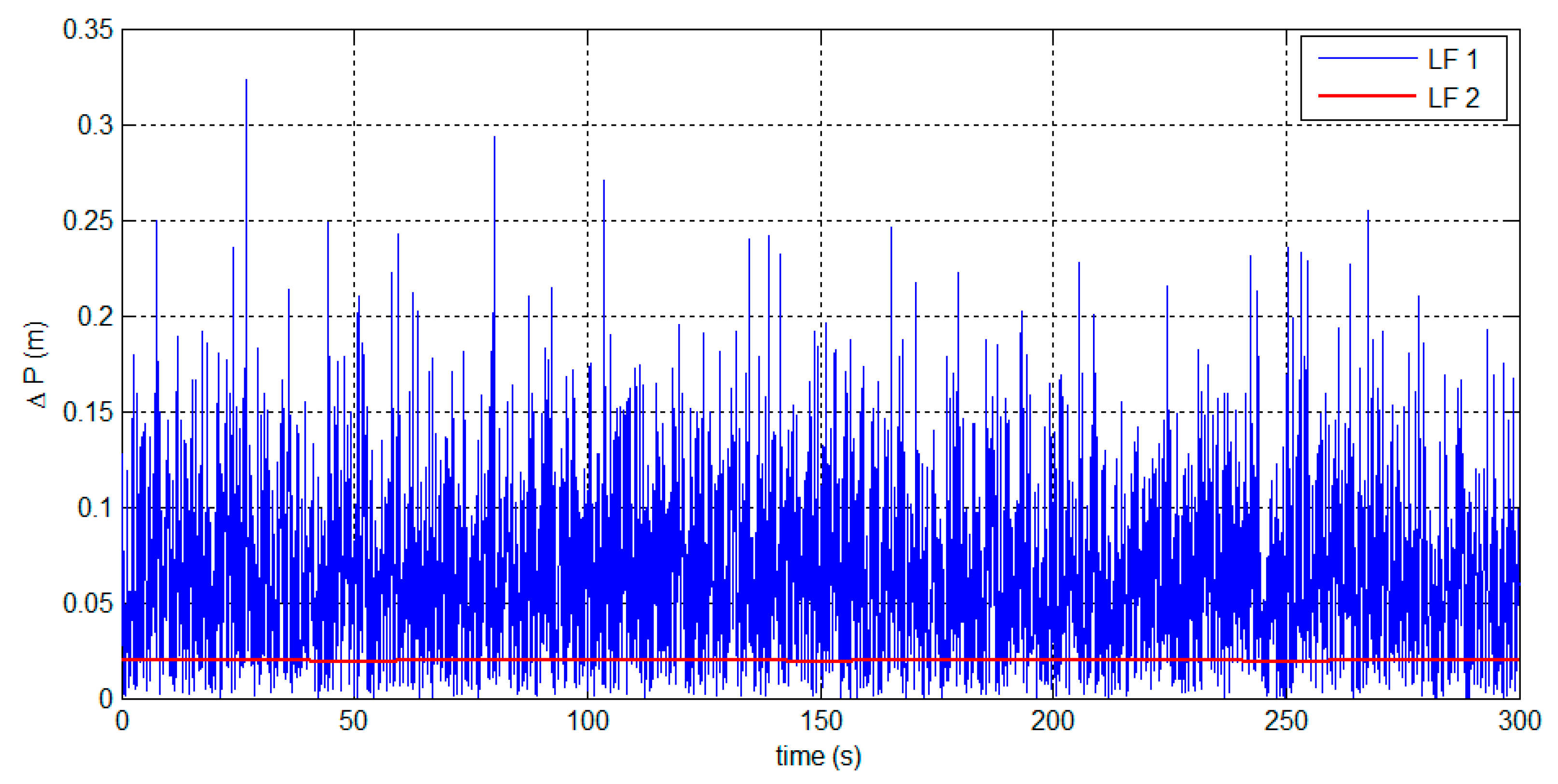
6.1.1. Performance of the Two LFs and Positioning Accuracy


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LF 1 | LF 2 | |
|---|---|---|
| 0.0010 | ||
| 0.0014 | ||

| Mean (m) | SD (m) | |
|---|---|---|
| LF 1 | 0.06542 | 0.05014 |
| LF 2 | 0.0195 | 0.0001697 |
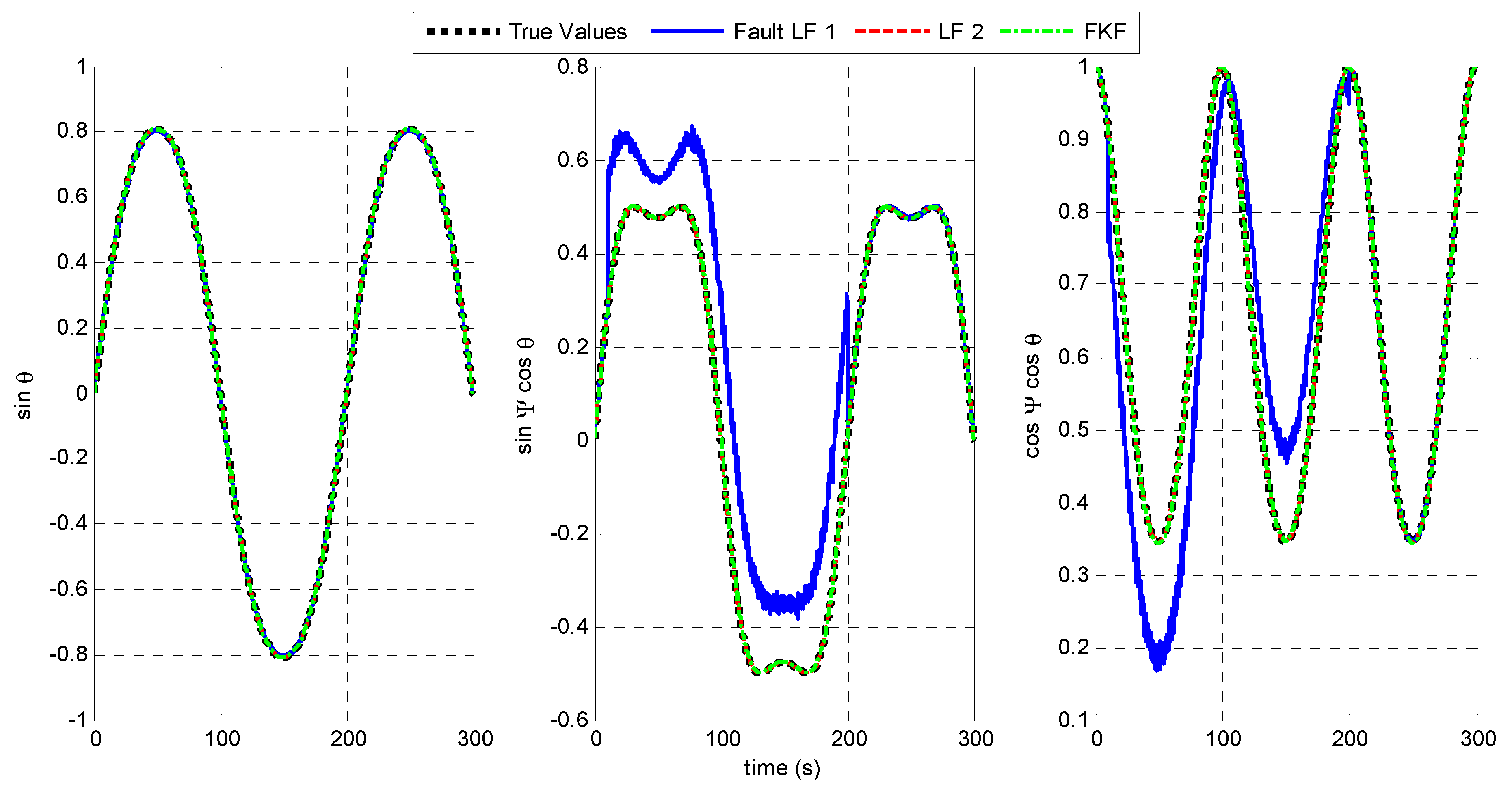
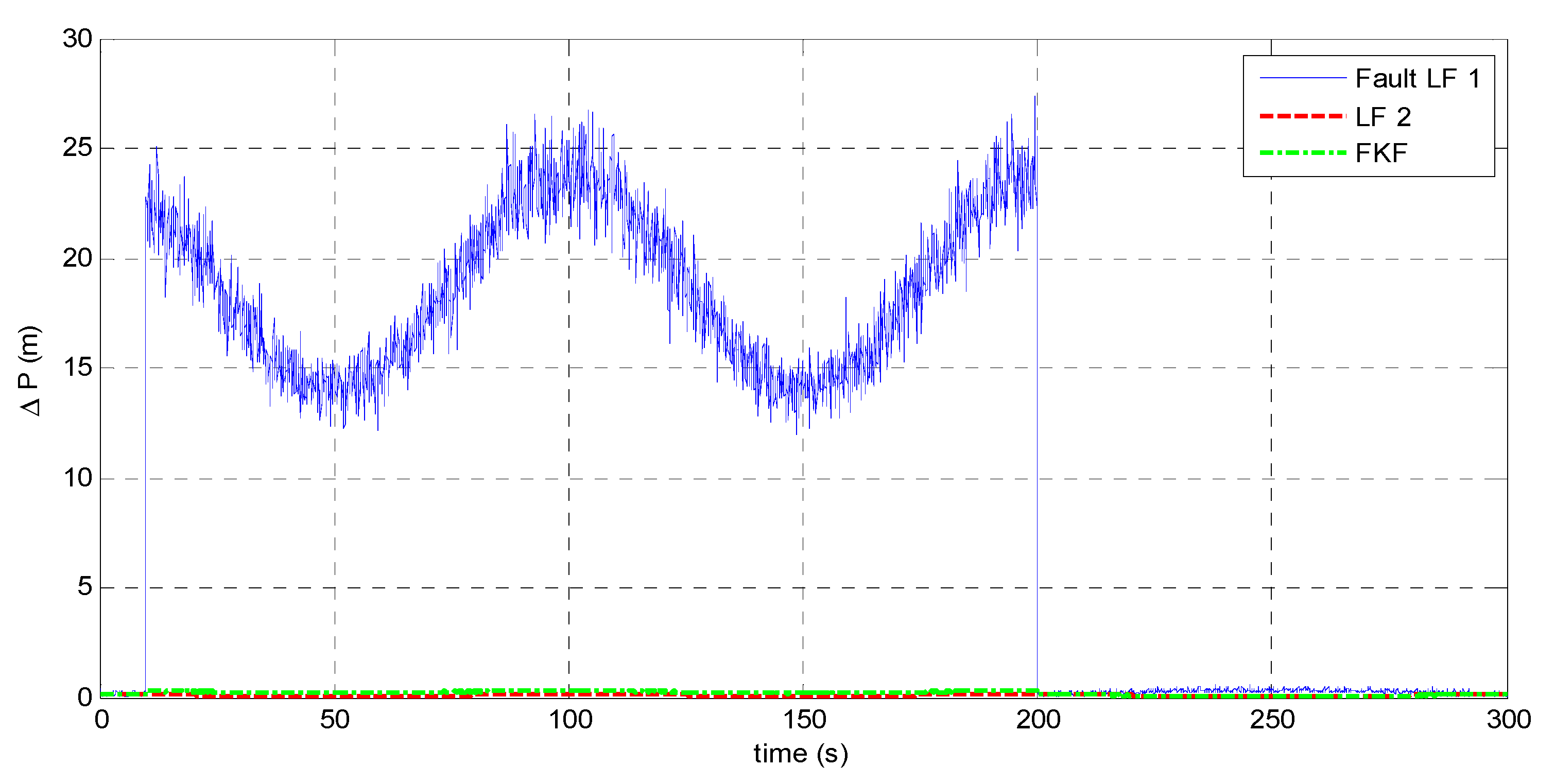
6.1.2. Fault-Tolerant Capability of FKF


| Mean (m) | SD (m) | |
|---|---|---|
| Fault LF 1 | 18.63 | 3.577 |
| LF 2 | 0.09069 | 0.006407 |
| FKF | 0.2573 | 0.04489 |
6.2. Experimental Results
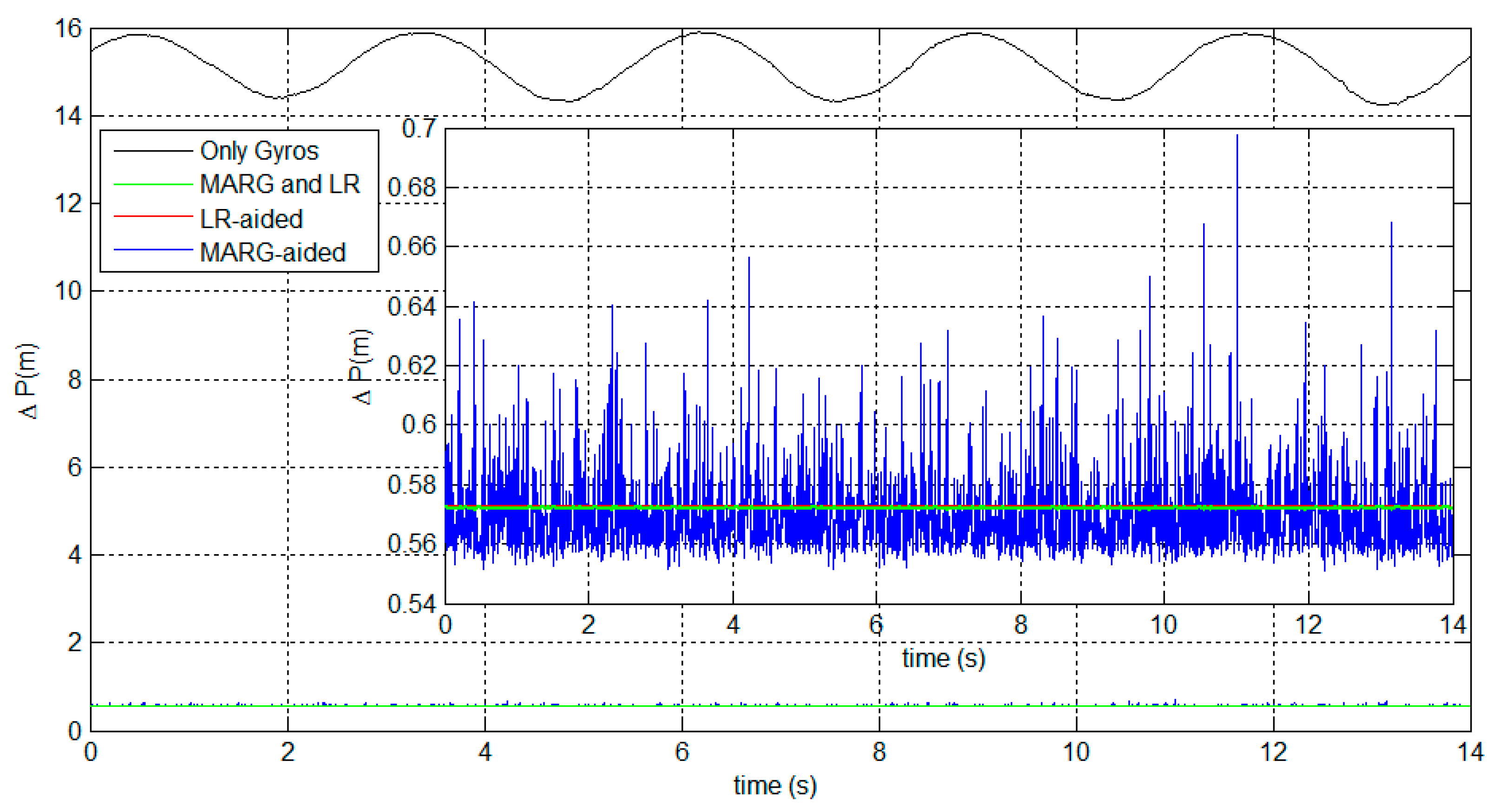
6.2.1. Accuracy of the Target Positioning System

| Mean (m) | SD (m) | |
|---|---|---|
| Only Gyros | 15.12 | 0.5471 |
| MARG-aided | 0.5698 | 0.01404 |
| LR-aided | 0.5726 | |
| MARG and LR | 0.5721 | 0.000169 |
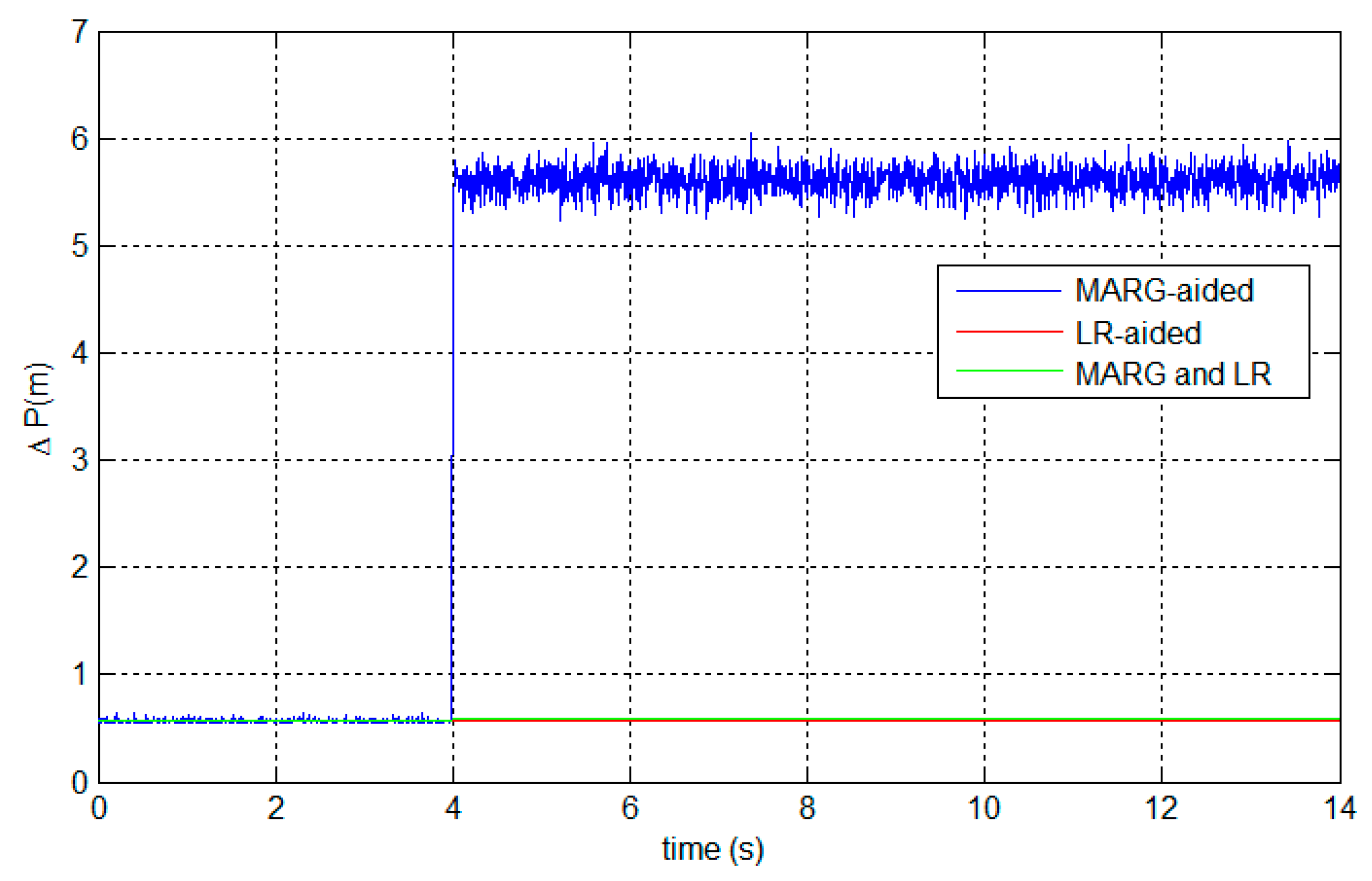
6.2.2. System Fault-Tolerant Capability

| Mean (m) | SD (m) | |
|---|---|---|
| MARG-aided | 5.609 | 0.1231 |
| LR-aided | 0.5726 | |
| MARG and LR | 0.5901 | 0.000271 |
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Cheng, J.; Landry, R.; Chen, D.; Guan, D. A novel method for target navigation and mapping based on laser ranging and MEMS/GPS navigation. J. Appl. Math. 2014, 2014. [Google Scholar] [CrossRef]
- Ma, D.M.; Shiau, J.K.; Wang, I.C.; Lin, Y.H. Attitude determination using a MEMS-based flight information measurement unit. Sensors 2012, 12, 1–23. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Efatmaneshnik, M.; Dempster, A.G. Attitude determination by integration of MEMS inertial sensors and GPS for autonomous agriculture applications. GPS Solut. 2012, 16, 41–52. [Google Scholar] [CrossRef]
- Li, D.; Landry, R.; Lavoie, P. Low-cost MEMS sensor-based attitude determination system by integration of magnetometers and GPS: A real-data test and performance evaluation. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 5–8 May 2008; pp. 1190–1198.
- Sabatini, A.M. Estimating three-dimensional orientation of human body parts by Inertial/Magnetic sensing. Sensors 2011, 11, 1489–1525. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Dempster, A.; Li, B.; Wang, J.; Rizos, C. A low-cost attitude heading reference system by combination of GPS and magnetometers and MEMS inertial sensors for mobile applications. Positioning 2006, 5, 88–95. [Google Scholar] [CrossRef]
- Afzal, M.H.; Renaudin, V.; Lachapelle, G. Magnetic field based heading estimation for pedestrian navigation environments. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimaraes, Portugal, 21–23 September 2011; pp. 1–10.
- Bosch. GLM-80 Laser Distance and Angle Measurer. Available online: http://www.bosch-pt.com/productspecials/professional/glm80/cn/en/index.html (accessed on 11 June 2015).
- Yadav, N.; Bleakley, C. Accurate orientation estimation using AHRS under conditions of magnetic distortion. Sensors 2014, 14, 20008–20024. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Atia, M.M.; Karamat, T.; Givigi, S.; Noureldin, A. A dual-rate multi-filter algorithm for LiDAR-aided indoor navigation systems. In Proceeding of the 2014 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 5–8 May 2014; pp. 1014–1019.
- Carlson, N.A. Federated filter for fault-tolerant integrated navigation systems. In Proceedings of the 1988 IEEE Location and Navigation Symposium (PLANS), Orlando, FL, USA, 29 November–2 December 1988; pp. 110–119.
- Luo, R.C.; Chen, O.; Lin, P.H. Indoor robot/human localization using dynamic triangulation and wireless pyroelectric infrared sensory fusion approaches. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 1359–1364.
- Luo, R.C.; Chen, O. Wireless and pyroelectric sensory fusion system for indoor human/robot localization and monitoring. IEEE-ASME Trans. Mechatron. 2013, 18, 845–853. [Google Scholar] [CrossRef]
- Tisdale, J.; Ryan, A.; Kim, Z.; Tornqvist, D.; Hedrick, J.K. A multiple UAV system for vision-based search and localization. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 1985–1990.
- Campbell, M.E.; Wheeler, M. A vision based geolocation tracking system for UAV’s. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Keystone, CO, USA, 21–24 August 2006; pp. 1–18.
- Shi, Z.; Sun, Y.; Xiong, L.; Hu, Y.; Yin, B. A multisource heterogeneous data fusion method for pedestrian tracking. Math. Probl. Eng. 2015, 2015, 1–10. [Google Scholar]
- Jing, L.; Vadakkepat, P. Improved particle filter in sensor fusion for tracking random moving object. In Proceedings of the Instrumentation and Measurement Technology Conference (IMTC 2004), Como, Italy, 18–20 May 2004; pp. 476–481.
- Tzschichholz, T.; Boge, T.; Schilling, K. Relative pose estimation of satellites using PMD-/CCD-sensor data fusion. Acta Astronaut. 2015, 109, 25–33. [Google Scholar] [CrossRef]
- Aghili, F.; Kuryllo, M.; Okouneva, G.; English, C. Robust vision-based pose estimation of moving objects for automated rendezvous & docking. In Proceedings of the 2010 International Conference on Mechatronics and Automation (ICMA), Xi’an, China, 4–7 August 2010; pp. 305–311.
- Gebre-Egziabher, D.; Hayward, R.C.; Powell, J.D. Design of multi-sensor attitude determination systems. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 627–649. [Google Scholar] [CrossRef]
- Emura, S.; Tachi, S. Sensor fusion based measurement of human head motion. In Proceedings of the 3rd IEEE International Workshop on Robot and Human Communication, Nagoya, Japan, 18–20 July 1994; pp. 124–129.
- Han, S.; Wang, J. A novel method to integrate IMU and magnetometers in attitude and heading reference systems. J. Navig. 2011, 64, 727–738. [Google Scholar] [CrossRef]
- Benson, D.O. A comparison of two approaches to pure-inertial and Doppler-inertial error analysis. IEEE Trans. Aerosp. Electron. Syst. 1975, aes-11, 447–455. [Google Scholar] [CrossRef]
- Li, W.; Wang, J. Effective adaptive Kalman filter for MEMS-IMU/magnetometers integrated attitude and heading reference systems. J. Navig. 2013, 66, 99–113. [Google Scholar] [CrossRef]
- Phuong, N.H.Q.; Kang, H.J.; Suh, Y.S.; Ro, Y.S. A DCM based orientation estimation algorithm with an inertial measurement unit and a magnetic compass. J. Univers. Comput. Sci. 2009, 15, 859–876. [Google Scholar]
- Ercan, Z.; Sezer, V.; Heceoglu, H.; Dikilitas, C.; Gokasan, M.; Mugan, A.; Bogosyan, S. Multi-sensor data fusion of DCM based orientation estimation for land vehicles. In Proceedings of the 2011 IEEE International Conference on Mechatronics (ICM), Istanbul, Turkey, 13–15 April 2011; pp. 672–677.
- Soloviev, A.; Bates, D.; Graas, F. Tight coupling of laser scanner and inertial measurements for a fully autonomous relative navigation solution. Navigation 2007, 54, 189–205. [Google Scholar] [CrossRef]
- Karras, G.C.; Kyriakopoulos, K.J. Localization of an underwater vehicle using an IMU and a laser-based vision system. In Proceedings of the IEEE Mediterranean Conference on Control & Automation, Athens, Greece, 27–29 June 2007; pp. 1–6.
- Ali, A.; El-Sheimy, N. Low-cost MEMS-based pedestrian navigation technique for GPS-denied areas. J. Sens. 2013, 2013, 1–10. [Google Scholar] [CrossRef]
- Hellmers, H.; Norrdine, A.; Blankenbach, J.; Eichhorn, A. An IMU/magnetometer-based indoor positioning system using Kalman filtering. In Proceedings of the 2013 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Montbeliard-Belfort, France, 28–31 October 2013; pp. 1–9.
- Bachrach, A.; Prentice, S.; He, R.; Roy, N. Range-robust autonomous navigation in GPS-denied environments. J. Field Robot. 2011, 28, 644–666. [Google Scholar] [CrossRef]
- Georgy, J.; Noureldin, A.; Korenberg, M.J.; Bayoumi, M.M. Low-cost three-dimensional navigation solution for RISS/GPS integration using mixture particle filter. IEEE Trans. Veh. Technol. 2010, 59, 599–615. [Google Scholar] [CrossRef]
- Colombo, A.; Fontanelli, D.; Macii, D.; Palopoli, L. Flexible indoor localization and tracking based on a wearable platform and sensor data fusion. IEEE Trans. Instrum. Meas. 2014, 63, 864–876. [Google Scholar] [CrossRef]
- Carlson, N.A. Federated filter for distributed navigation and tracking applications. In Proceedings of the 58th Annual Meeting of the Institute of Navigation and CIGTF 21st Guidance Test Symposium, Albuquerque, NM, USA, 24–26 June 2002; pp. 340–353.
- Carlson, N.A. Federated square root filter for decentralized parallel processes. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 517–525. [Google Scholar] [CrossRef]
- Bancroft, J.B.; Lachapelle, G. Data fusion algorithms for multiple inertial measurement units. Sensors 2011, 11, 6771–6798. [Google Scholar] [CrossRef] [PubMed]
- Woffinden, D.C.; Geller, D.K. Relative angles-only navigation and pose estimation for autonomous orbital rendezvous. J. Guid. Control Dyn. 2007, 30, 1455–1469. [Google Scholar] [CrossRef]
- Titterton, D.; Weston, J. Strapdown Inertial Navigation Technology, 2nd ed.; the Institution of Electrical Engineers: Stevenage, UK, 2004; pp. 21–22. [Google Scholar]
- Roetenberg, D.; Luinge, H.J.; Baten, C.T.M.; Veltink, P.H. Compensation of magnetic disturbances improves inertial and magnetic sensing of human body segment orientation. IEEE Trans. Neural Syst. Rehabil. Eng. 2005, 13, 395–405. [Google Scholar] [CrossRef] [PubMed]
- Koo, W.; Sung, S.; Lee, Y.J. Error calibration of magnetometer using nonlinear integrated filter model with inertial sensors. IEEE Trans. Magn. 2009, 45, 2740–2743. [Google Scholar]
- Grewal, M.; Andrews, A. Kalman Filtering Theory and Practice Using MATLAB, 3rd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2008; pp. 138–140. [Google Scholar]
- ST. STSTEVAL-MKI119V1board. Available online: http://www.st.com/web/en/catalog/tools/PF252689 (accessed on 11 June 2015).
- Cheng, J.; Chen, D.; Sun, X.; Wang, T. A simultaneously calibration approach for installation and attitude errors of an INS/GPS/LDS target tracker. Sensors 2015, 15, 3575–3592. [Google Scholar] [CrossRef] [PubMed]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Guan, D.; Jr. Landry, R.; Cheng, J.; Sydorenko, K. An Accurate and Fault-Tolerant Target Positioning System for Buildings Using Laser Rangefinders and Low-Cost MEMS-Based MARG Sensors. Sensors 2015, 15, 27060-27086. https://doi.org/10.3390/s151027060
Zhao L, Guan D, Jr. Landry R, Cheng J, Sydorenko K. An Accurate and Fault-Tolerant Target Positioning System for Buildings Using Laser Rangefinders and Low-Cost MEMS-Based MARG Sensors. Sensors. 2015; 15(10):27060-27086. https://doi.org/10.3390/s151027060
Chicago/Turabian StyleZhao, Lin, Dongxue Guan, René Jr. Landry, Jianhua Cheng, and Kostyantyn Sydorenko. 2015. "An Accurate and Fault-Tolerant Target Positioning System for Buildings Using Laser Rangefinders and Low-Cost MEMS-Based MARG Sensors" Sensors 15, no. 10: 27060-27086. https://doi.org/10.3390/s151027060
APA StyleZhao, L., Guan, D., Jr. Landry, R., Cheng, J., & Sydorenko, K. (2015). An Accurate and Fault-Tolerant Target Positioning System for Buildings Using Laser Rangefinders and Low-Cost MEMS-Based MARG Sensors. Sensors, 15(10), 27060-27086. https://doi.org/10.3390/s151027060