
Joint Temperature-Lasing Mode Compensation for Time-of-Flight LiDAR Sensors


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Statement of Contributions
- A thorough motivation for why it is meaningful to consider mode-hopping effects in laser scanners, arising from a physical description of the lasing mechanism in laser diodes;
- A thermodynamical model for the thermal dynamics of a whole laser scanner, needed by the proposed strategy to account for temperature effects;
- A statistical model describing the measurement process that decouples the effects of the mode-hopping from temperature effects;
- A numerically-efficient EM strategy based on the statistical model above;
- A validation of the proposed compensation strategy on real devices.
1.2. Organization of the Manuscript
2. Effects of the Laser Temperature on the Measured Distance


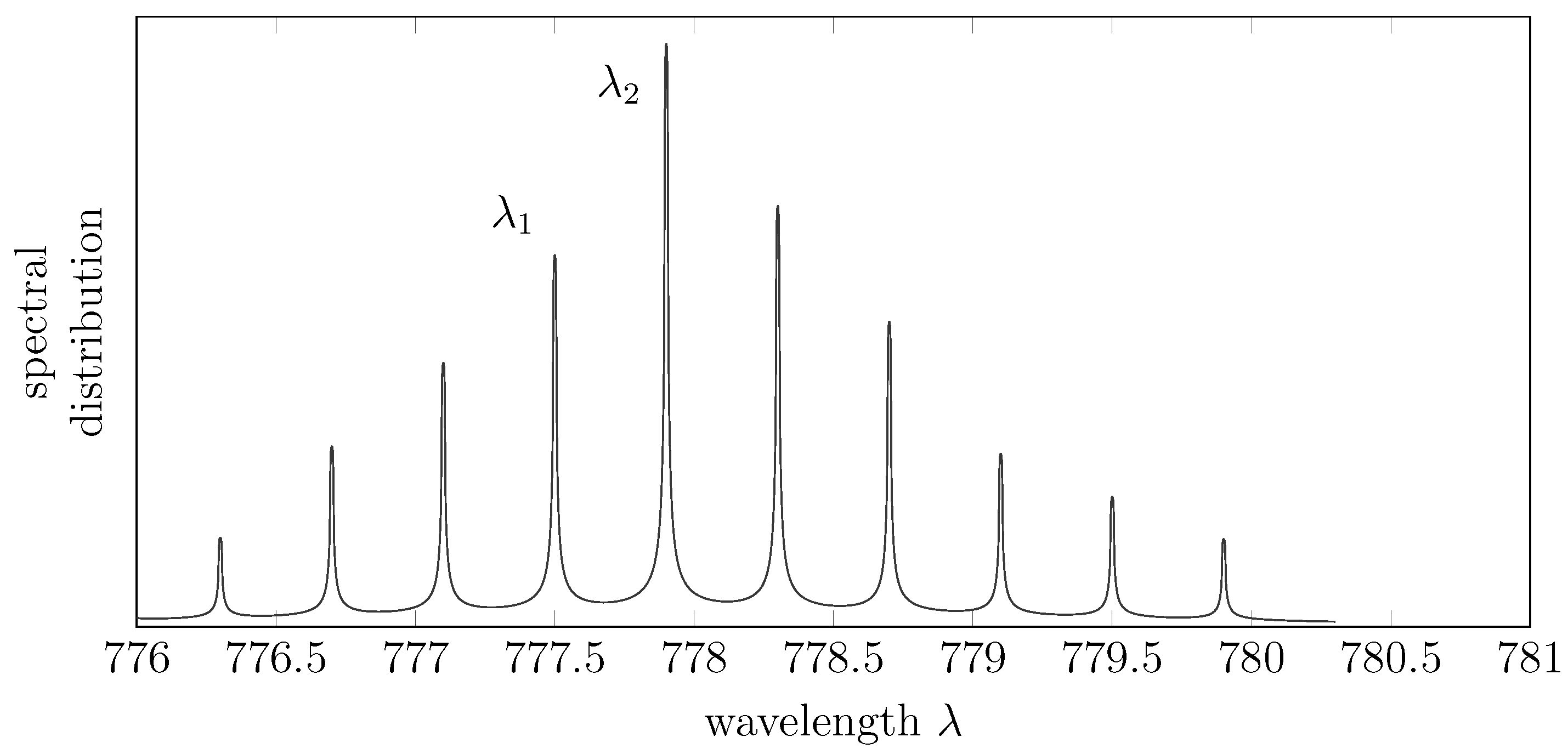
- In general, lasers do not emit at a unique frequency λ. Indeed, the average spectral distribution of the laser pulses follows a “comb”-like density, like the one in Figure 2.
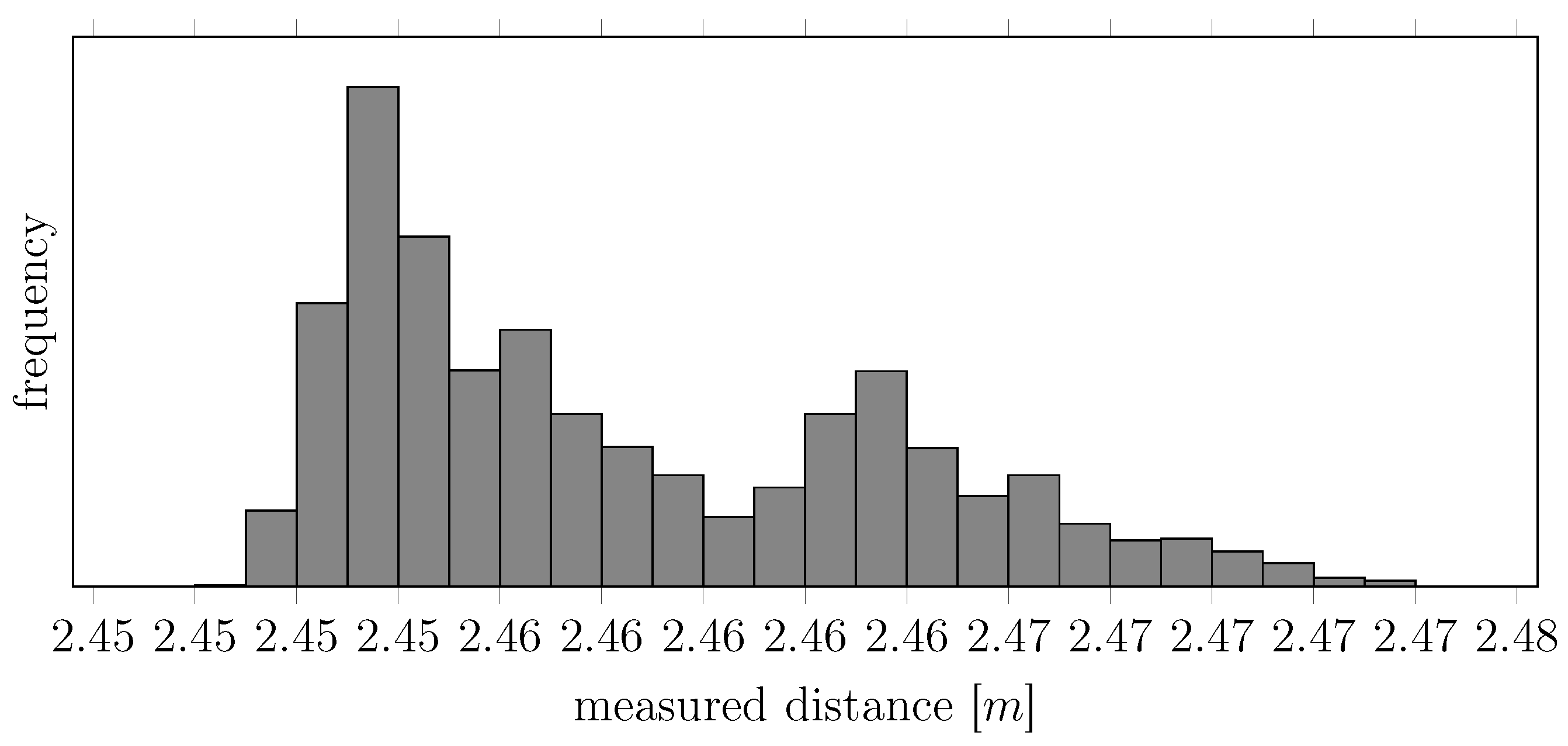
- Lasers are affected by the so-called mode-hopping effect [8] and, indeed, oscillate between different lasing modes (the teeth of the “comb” of Figure 2), for which two different pulses generated under the same temperature and external conditions may have different λ’s (e.g., referring to the same figure, the first pulse may contain only photons with wavelengths , while the second pulse may contain only photons with wavelengths ). In other words, the actual distribution of one specific pulse may contain only a subset of the teeth of the average spectral distribution. Using naively Equations (1) and (2) to estimate d without being aware of the mode hopping, i.e., assuming a certain without actually knowing that the average λ jumps between different lasing modes, reflects thus in a multimodal measurement of d, as clearly shown in Figure 3.
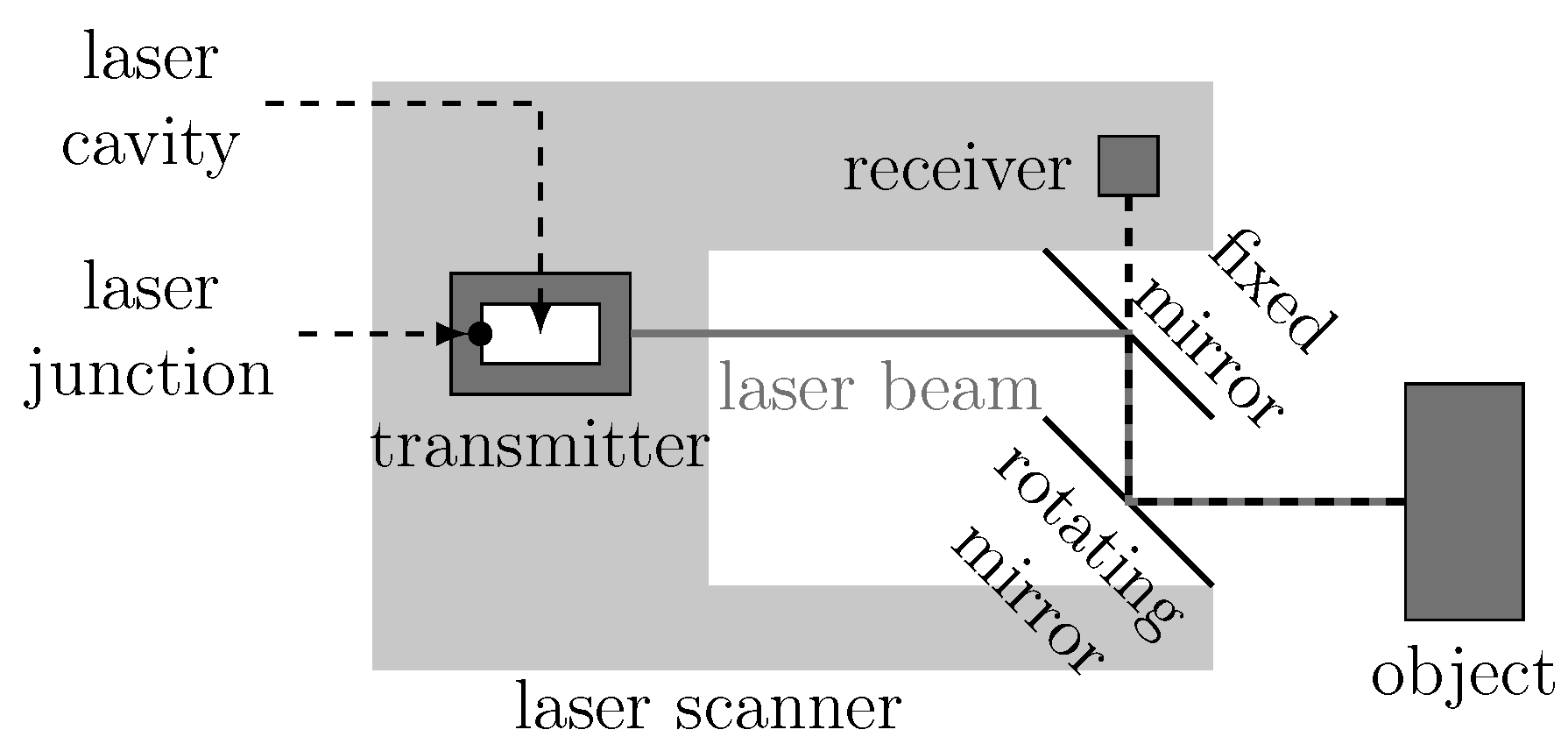
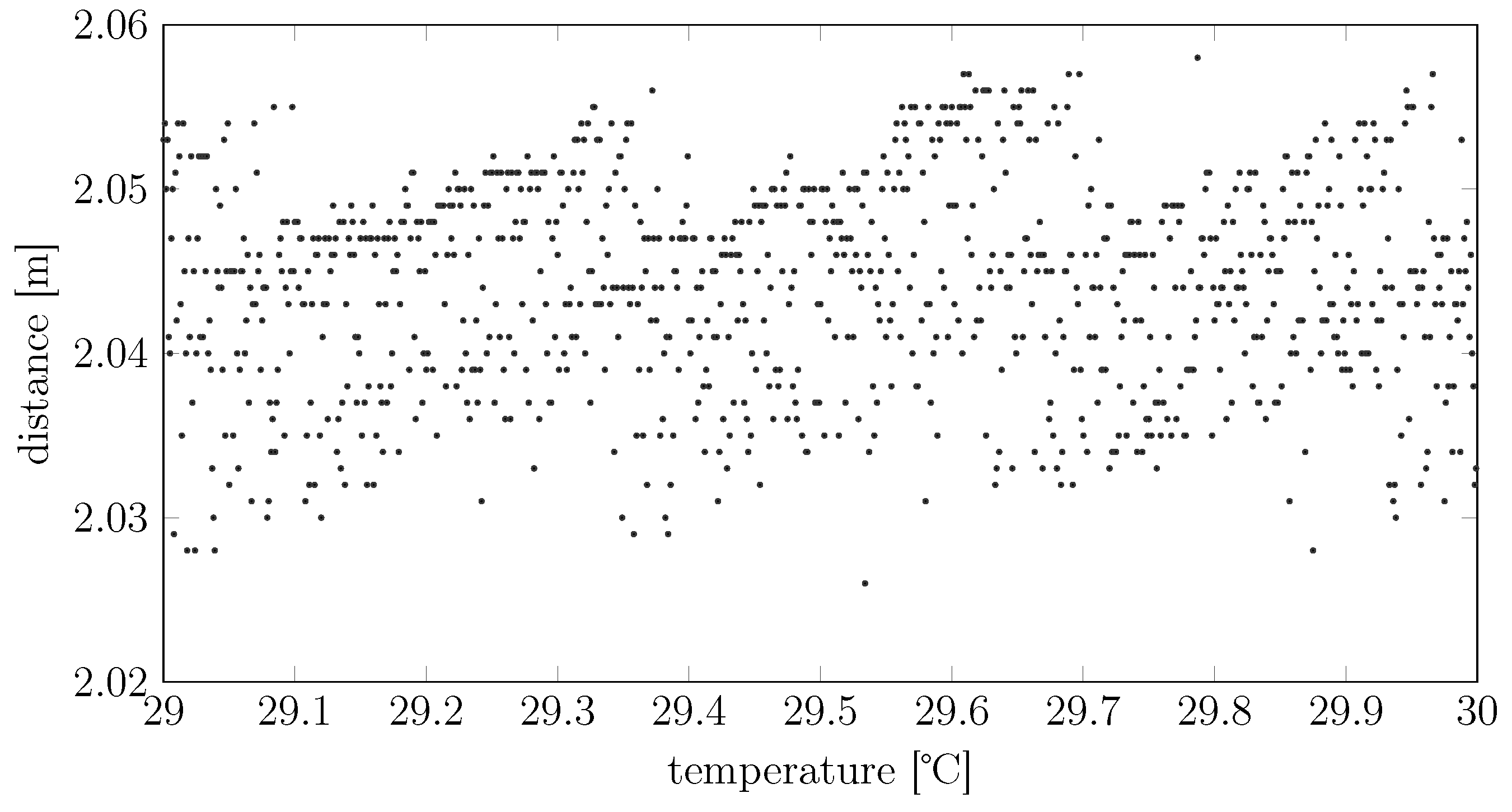
- The average spectral distribution of the laser pulses is not fixed, but rather depends on the temperature of the transmitter [9]. More precisely, the positions and amplitudes of the modes in Figure 2 depend on both the current flowing through the laser junction and the geometry of the laser cavity, but eventually, these two effects are inter-combined: the current flow produces heat that will modify the geometry of the cavity. Eventually, thus, the temperature affects the position and amplitude of the modes of the average spectral distribution. This temperature effect can be clearly seen in Figure 4: even if the device is nominally already compensated in temperature, one can clearly see two different lasing modes shifting in temperature.


3. A General Model for the Thermal Dynamics of a Pulsed ToF LiDAR
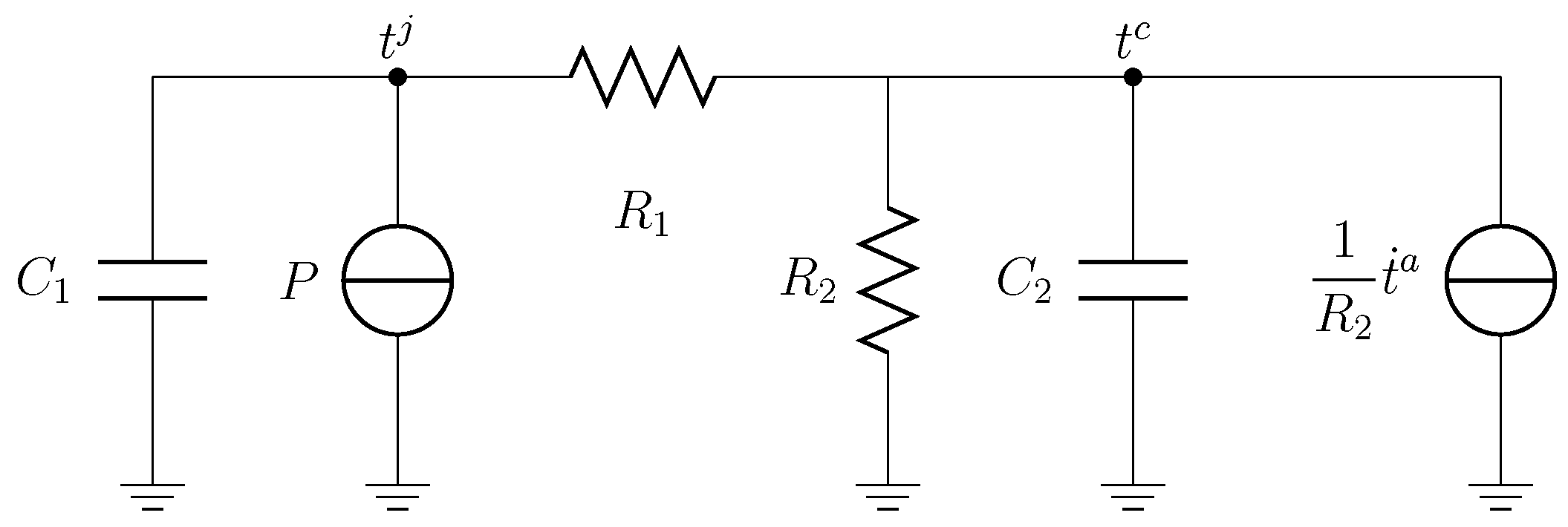
3.1. Physical Modeling

| P | Heat power generated by the junction (equal to zero when the device is off) |
| Temperature of the junction | |
| Temperature of the transmitter case | |
| Temperature of the external ambient | |
| Noisy measurement of the temperature of the transmitter case | |
| Thermal inertia of the transmitter case | |
| Thermal inertia of the laser scanner case | |
| Thermal resistance between the transmitter case and the laser scanner case | |
| Thermal resistance between the laser scanner case and the ambient |
3.2. Identifying Model Equation (5)
| Algorithm 1 Identification of model Equation (5) starting from the datasheet of a laser scanner. |
|
3.3. Estimating from
4. A General Measurement Model Accounting for Temperature and Mode Hopping Effects
- is the distance returned by the sensor;
- d is the true distance from the object (assumed deterministic);
- is the temperature of the laser cavity at time k;
- The two modes and account for a bimodal Gaussian and white additive measurement noise. The Bernoulli random variable (r.v.) selects the active mode at time k, so that π reflects the relative importance of the modes. Intuitively, represent which lasing mode has been active during measurement . We notice that here, we consider bimodal noises (i.e., only two lasing modes) just for notational simplicity. It is nonetheless immediate to generalize the subsequent findings for an M-modal case;
- is a non-linear transformation of the temperature of the laser junction in a measurement bias. In the following Examples 1 and 2, we show how different ’s and θ’s express different maps from the junction temperature to the measurement bias.


- Design the model, i.e., decide the structure for (e.g., between Example 1, Example 2 or also different ones depending on the need) starting from data collected in a controlled environment (see Section 7);
- Train the model, i.e., estimate θ and the statistics of , and from data collected in a controlled environment (see Section 5);
- Test the model, i.e., use the previous estimated quantities during the normal operation of the laser scanner, so as to improve the estimation of d from data collected in a non-controlled environment (see Section 6).
5. Training Model Equation (8)
- for ;
- d, i.e., the real distance;
- , i.e., measurements of the temperature of the laser scanner case (to be transformed into estimates of through Equation (7)).
- E-step
- M-step
6. Testing Model Equation (8)
- E-step
- M-step
7. Designing Model Equation (8)
- Section 7.1, suggesting some hints for designing different structures for (e.g., choosing the order for Example 1, for Example 2 or also designing different functional structures depending on the collected information);
- Section 7.2, suggesting a numerical algorithm for discriminating between different competing structures for H starting from data collected in a controlled environment.
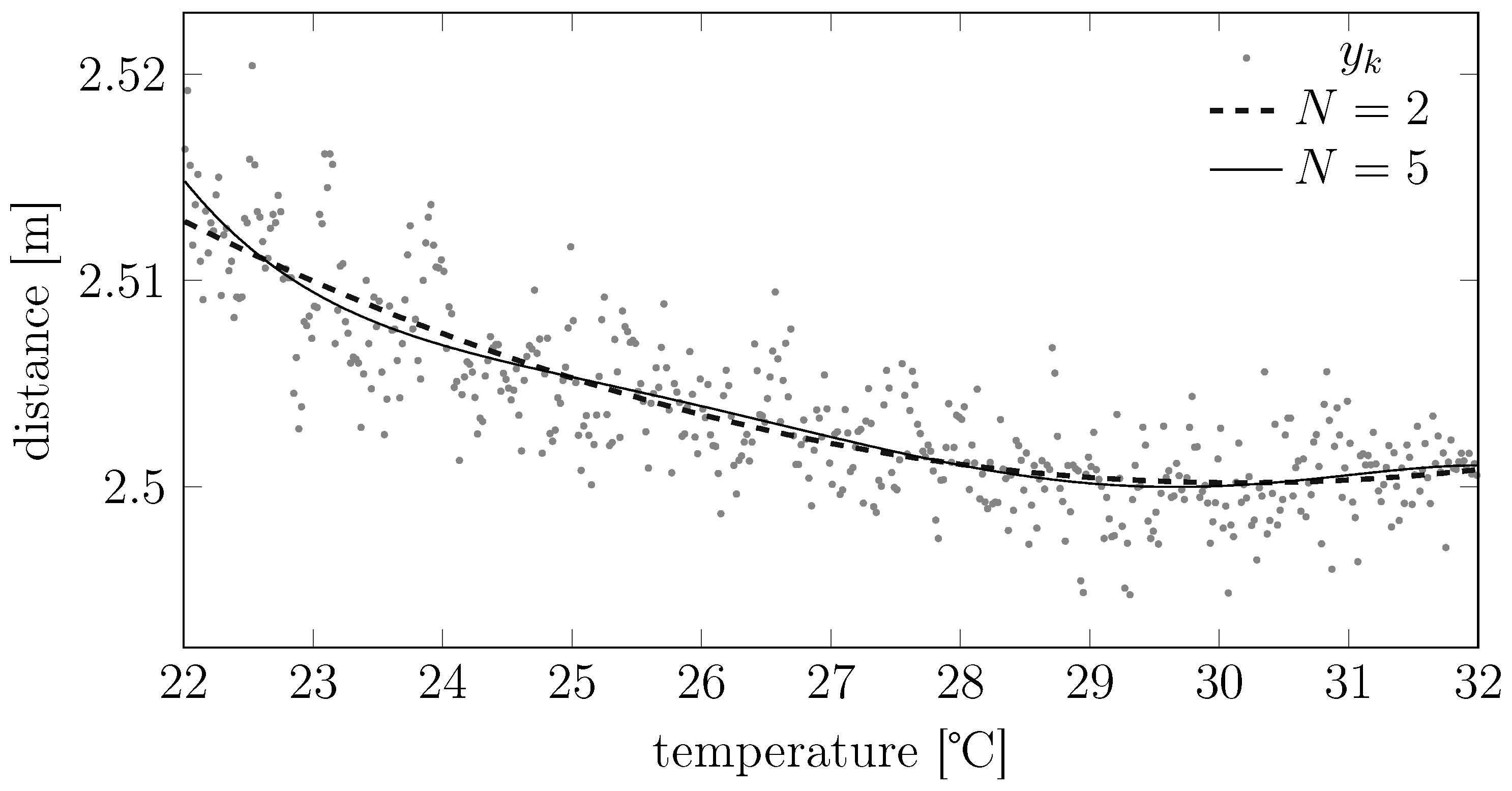
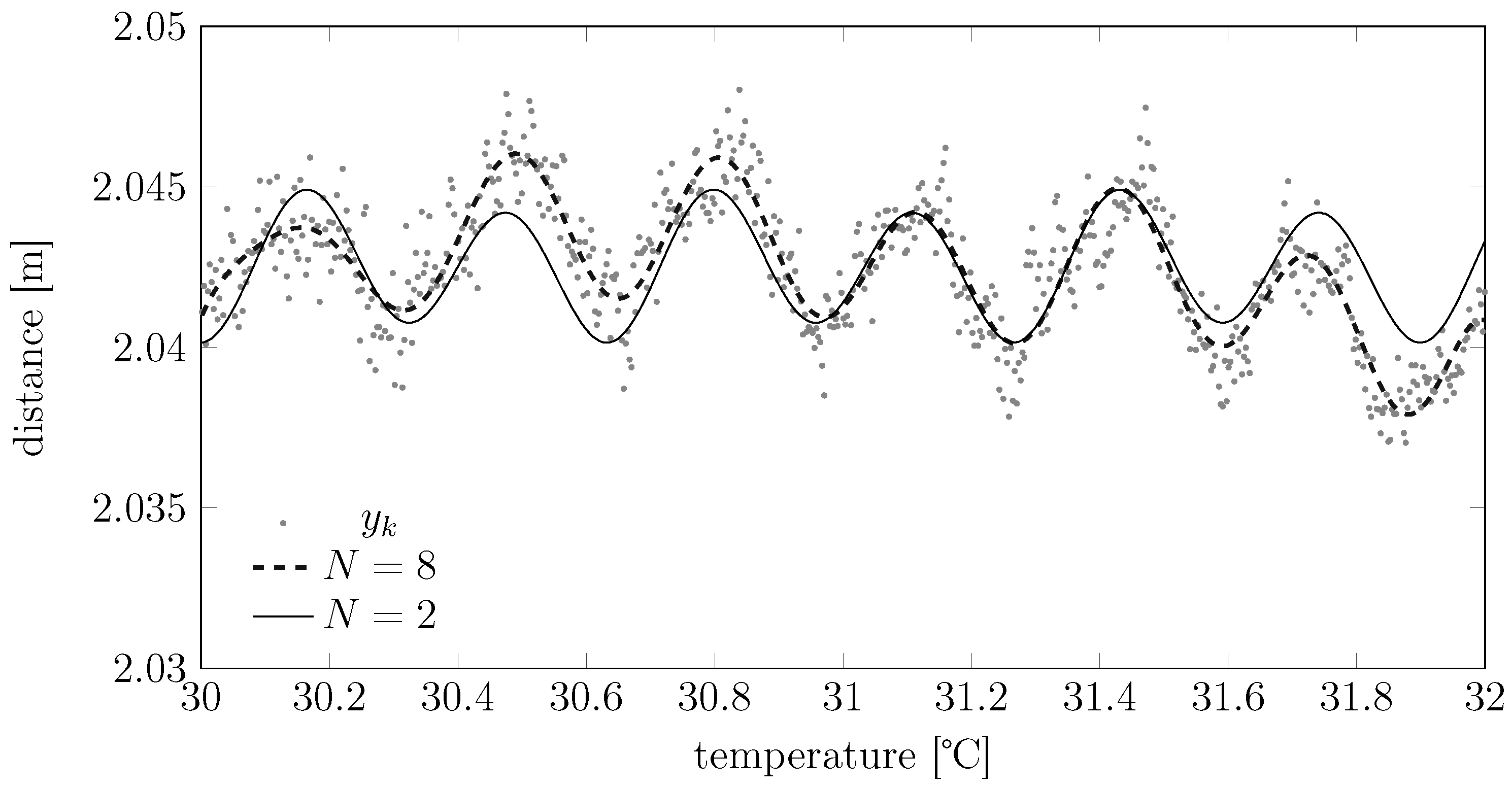
7.1. Designing
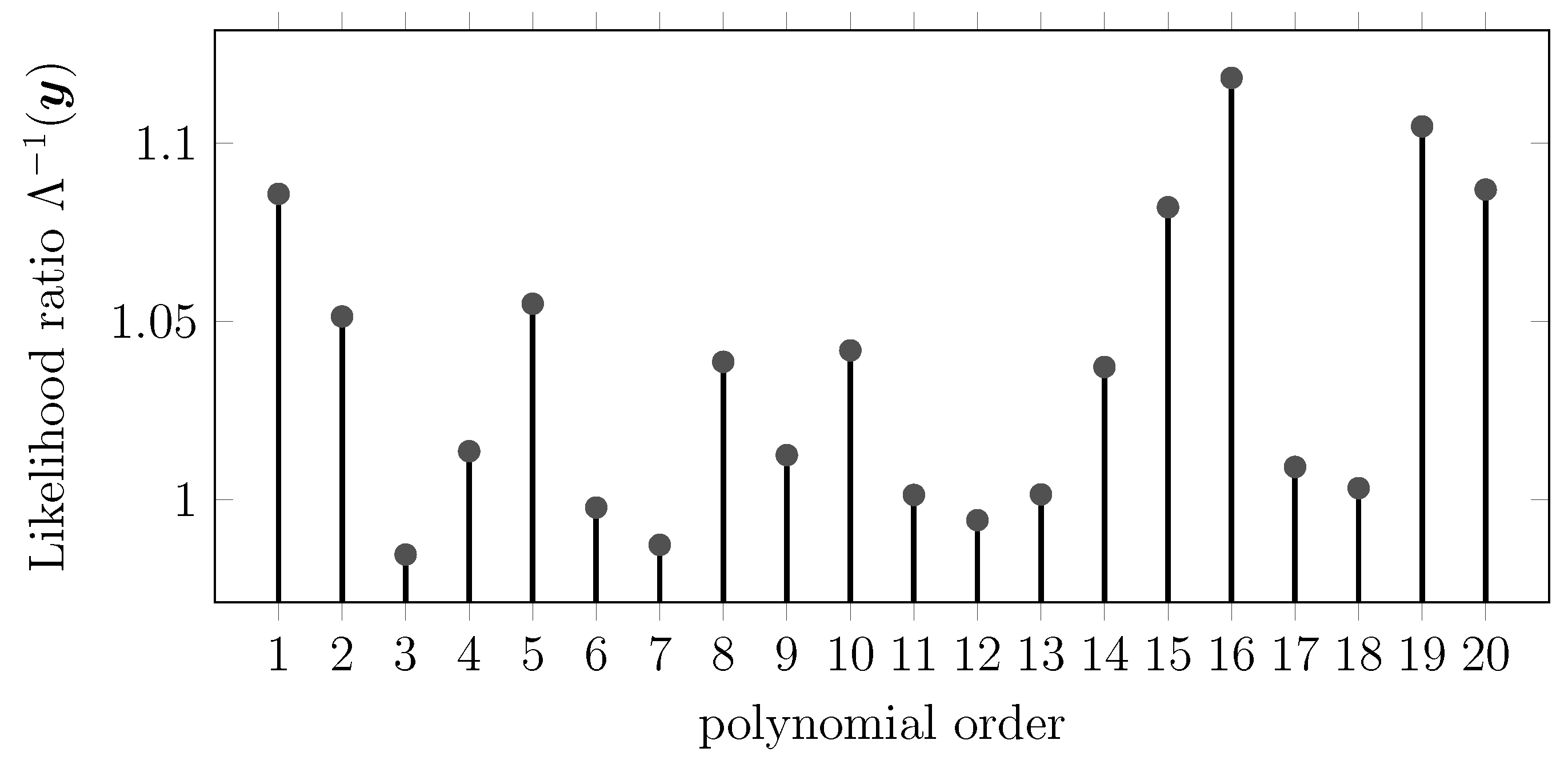
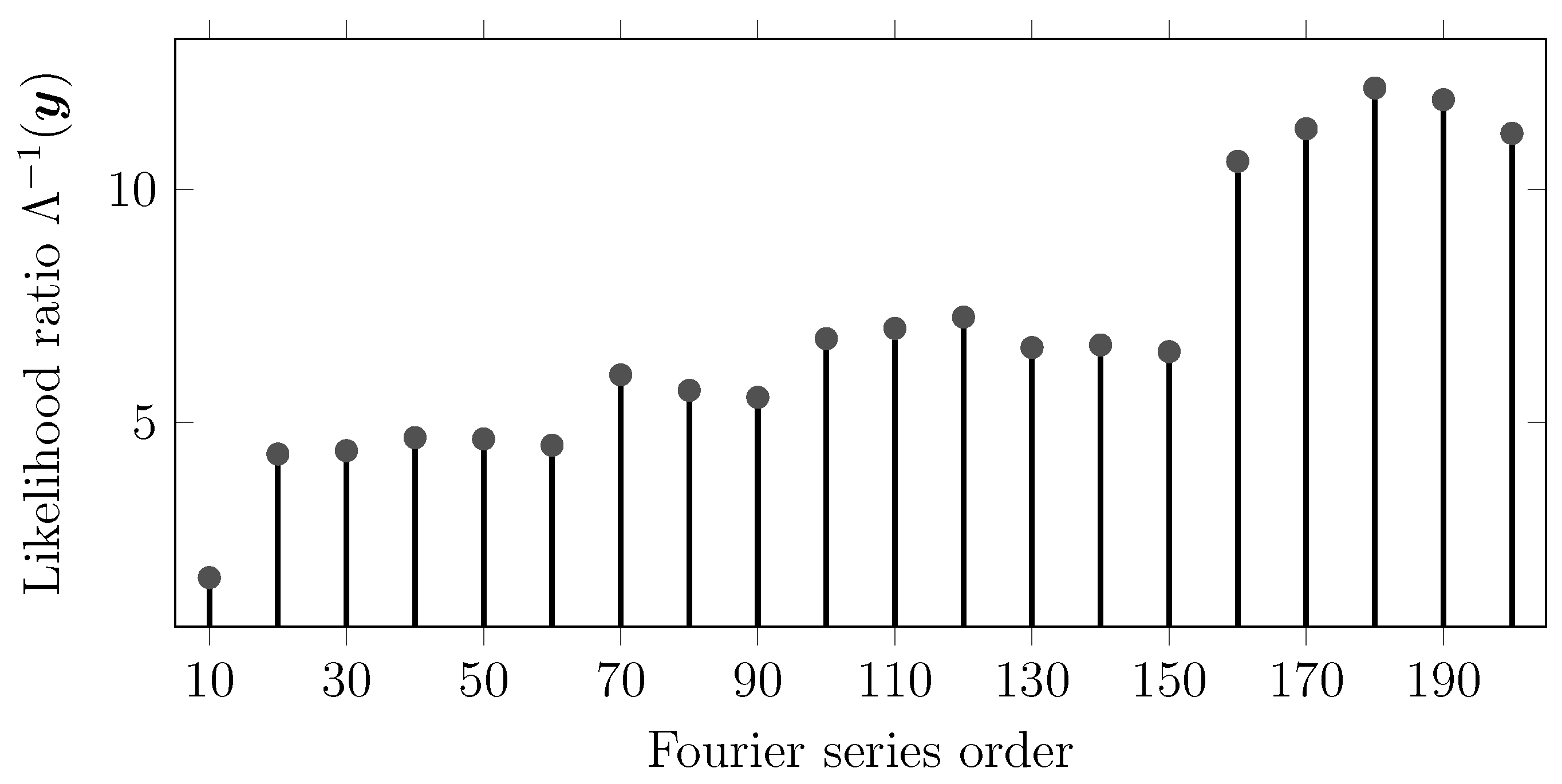
7.2. Determining the Best among Different Competing Potential Structures
| Algorithm 2 Selection of the best . |
|
8. Experiments
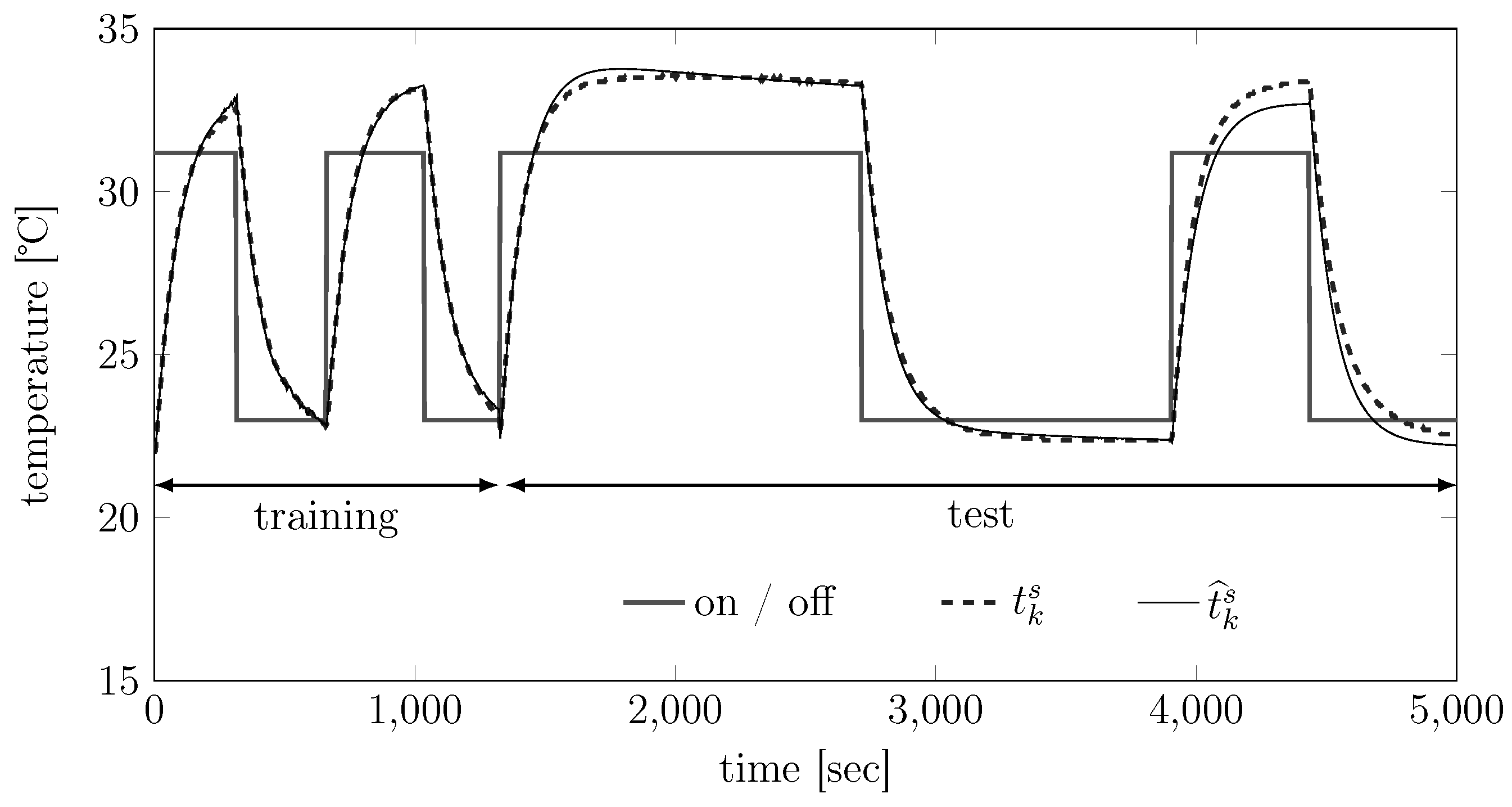
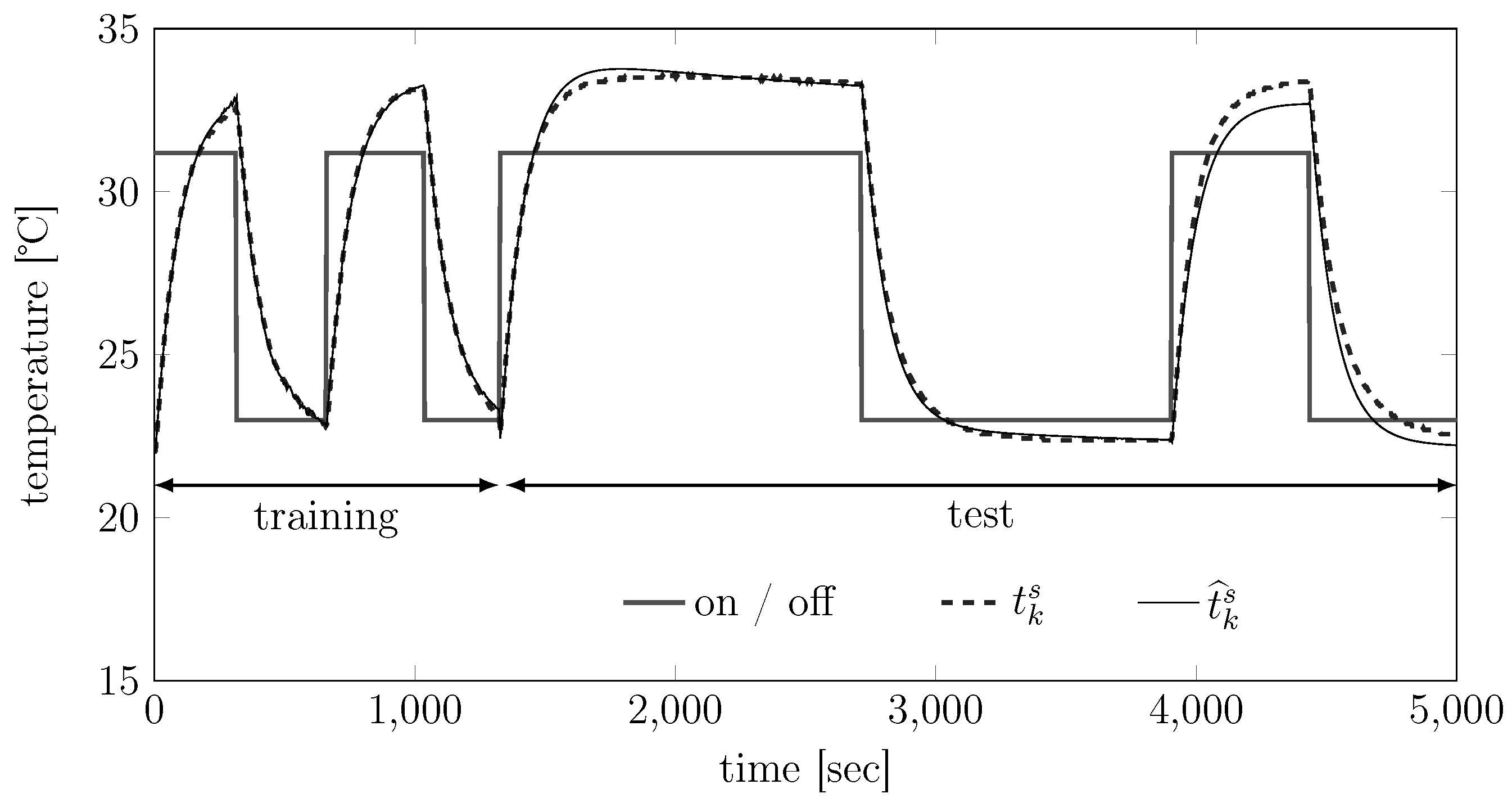
8.1. Training and Validation of the Thermal Model Equation (5)
8.2. Selection of the Optimal for the SICK 200 LiDAR


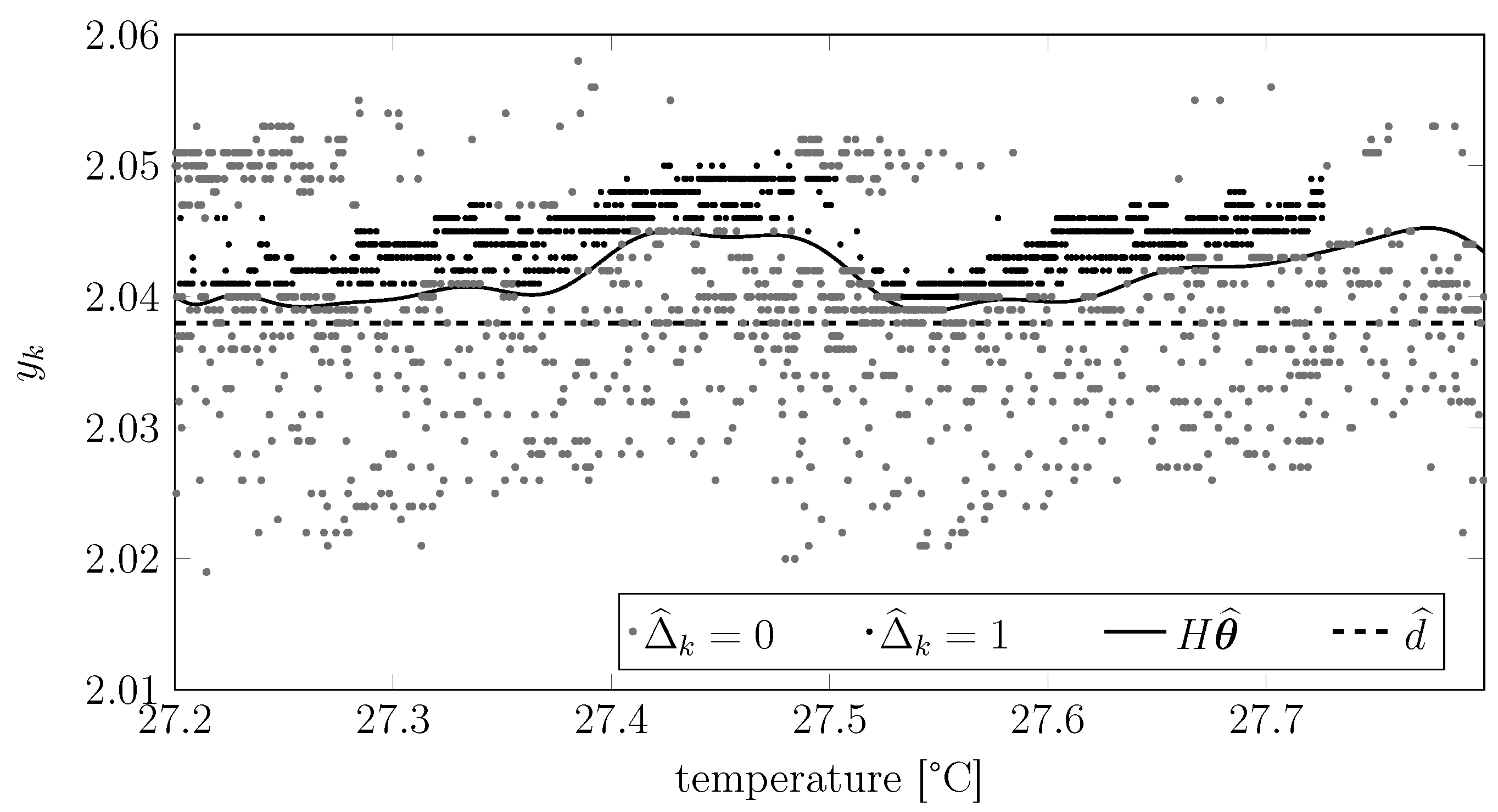
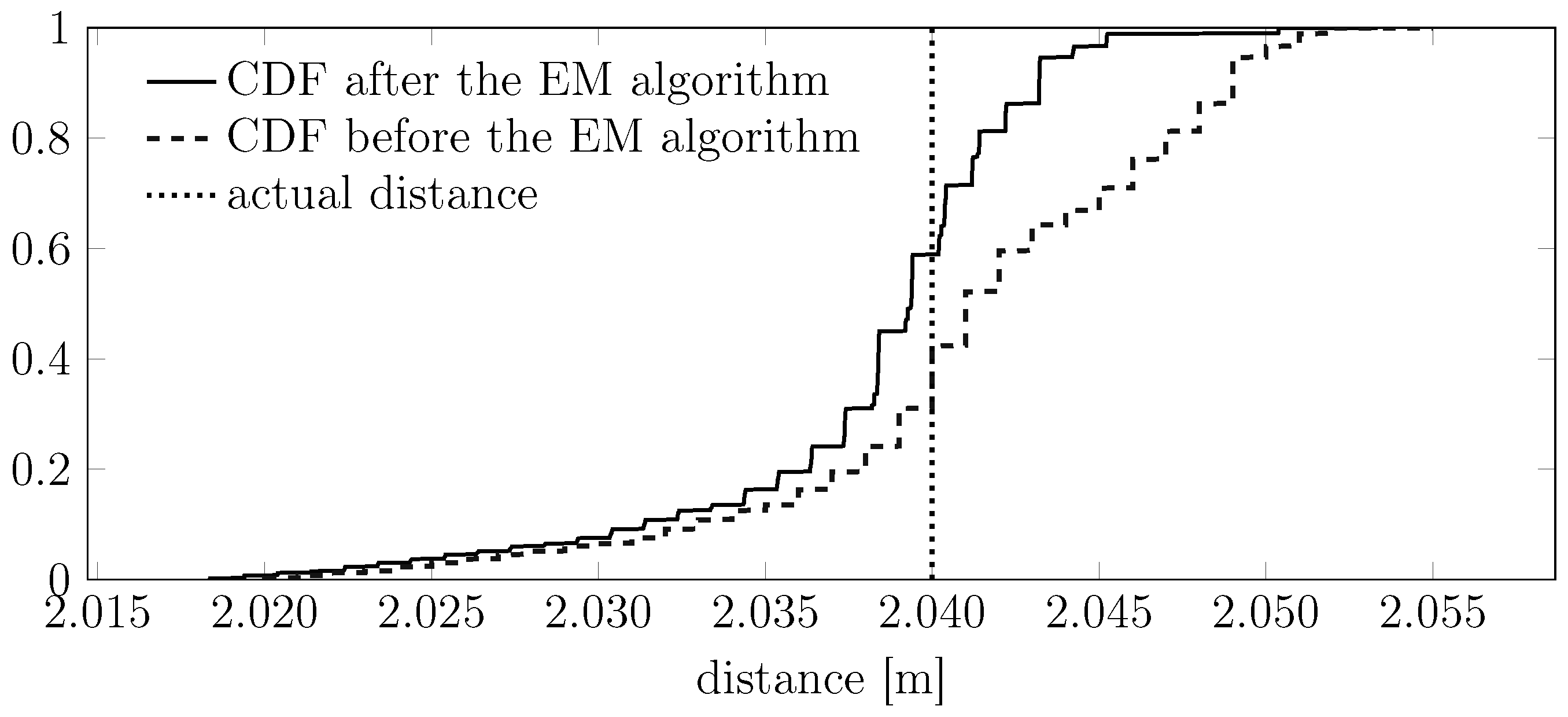
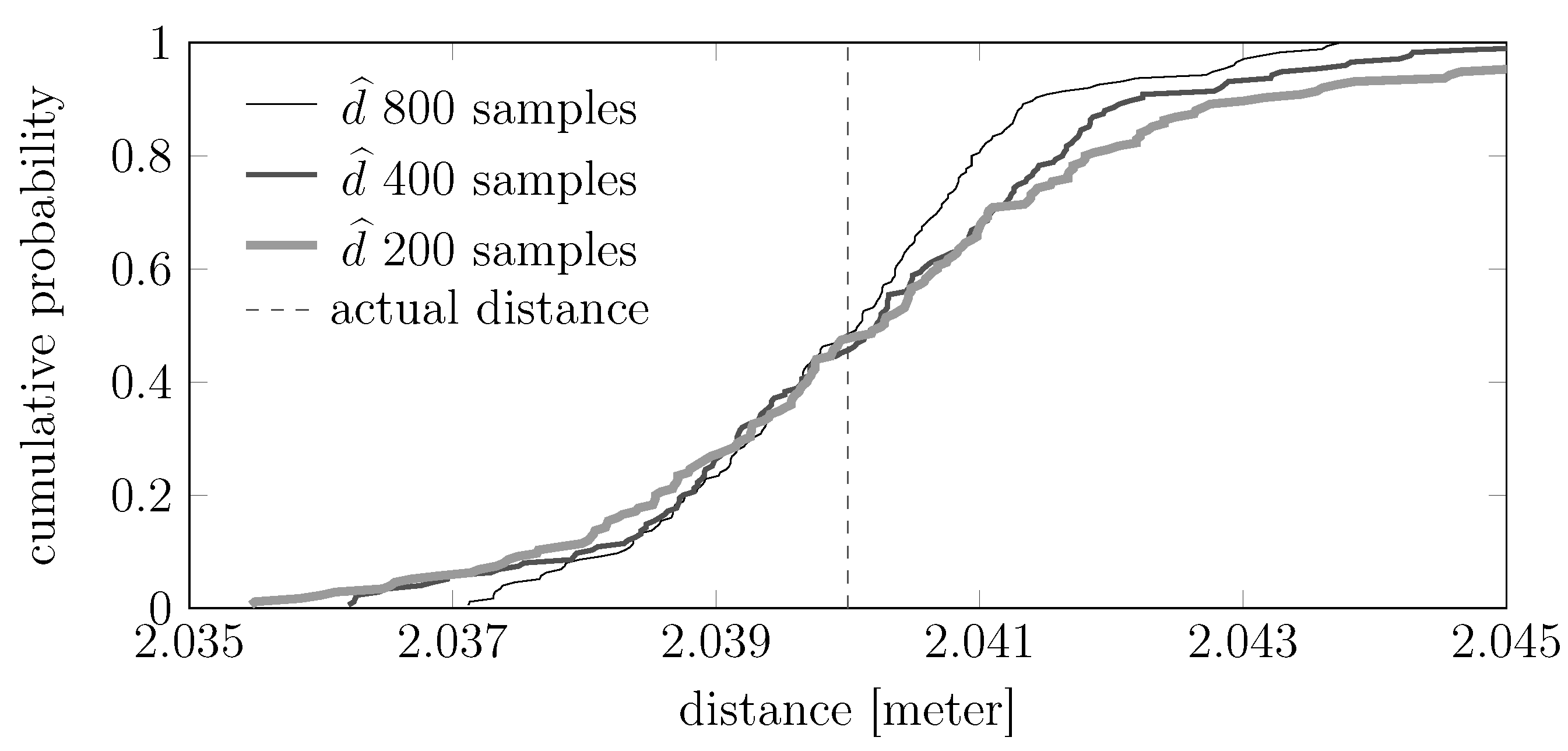
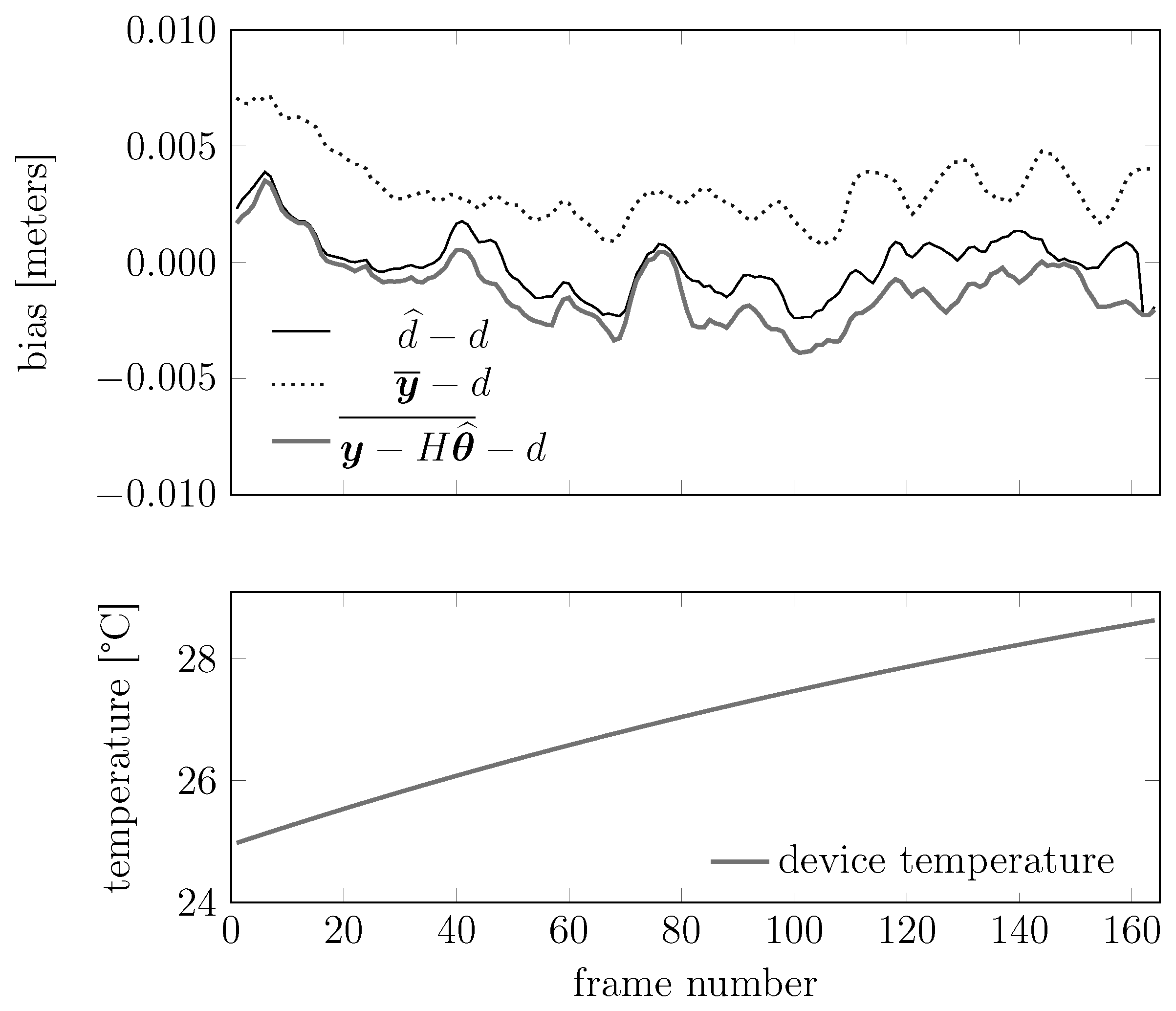
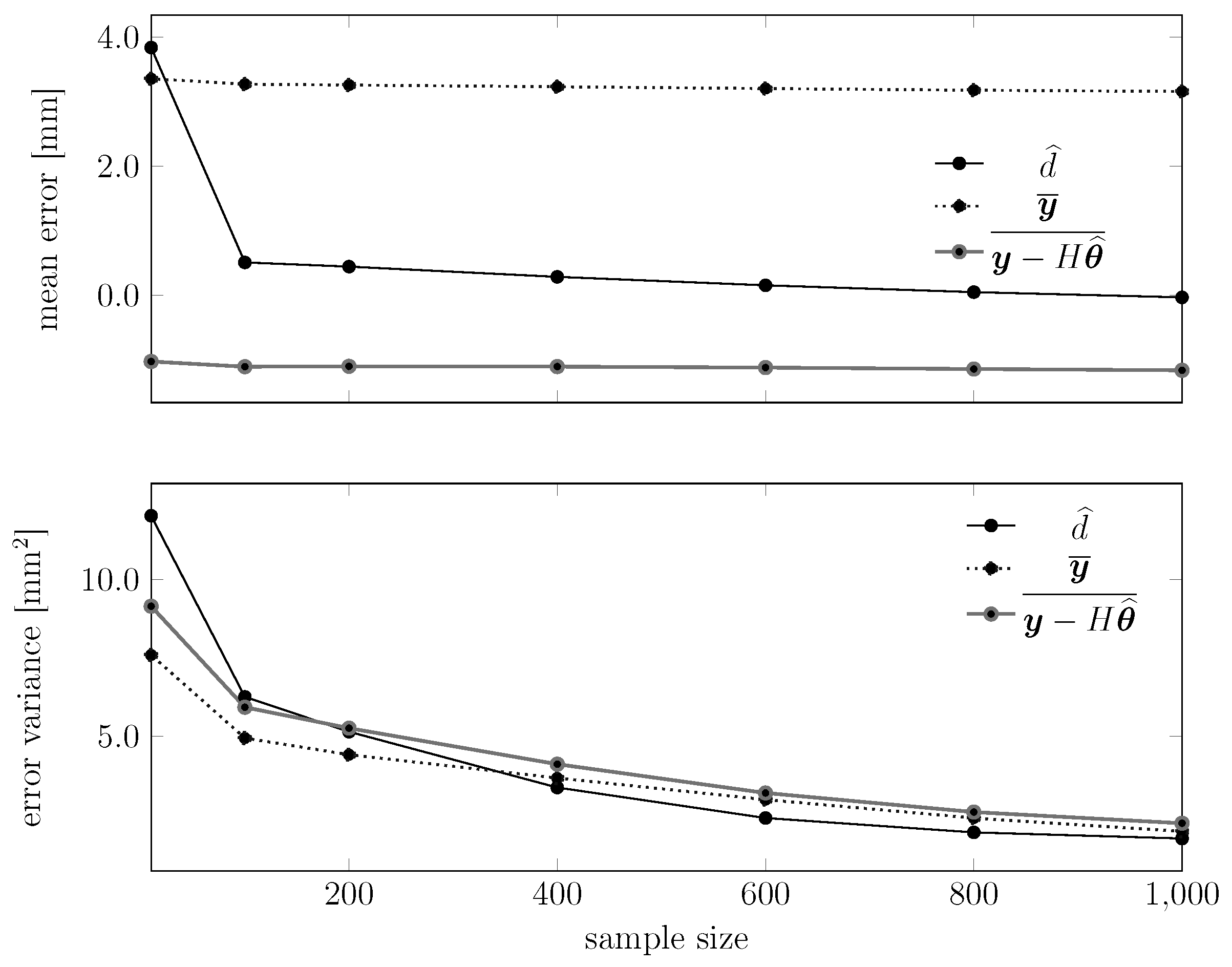
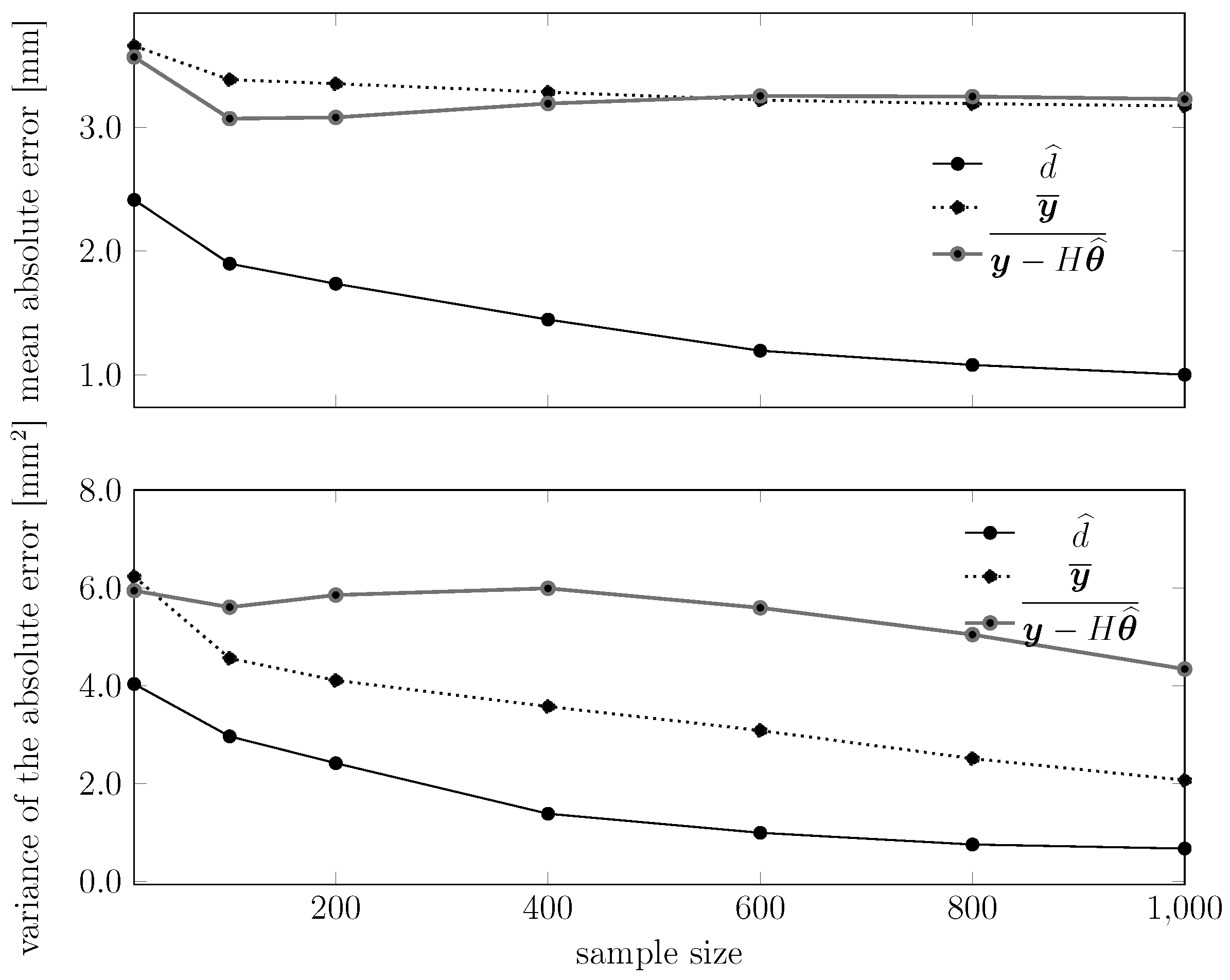
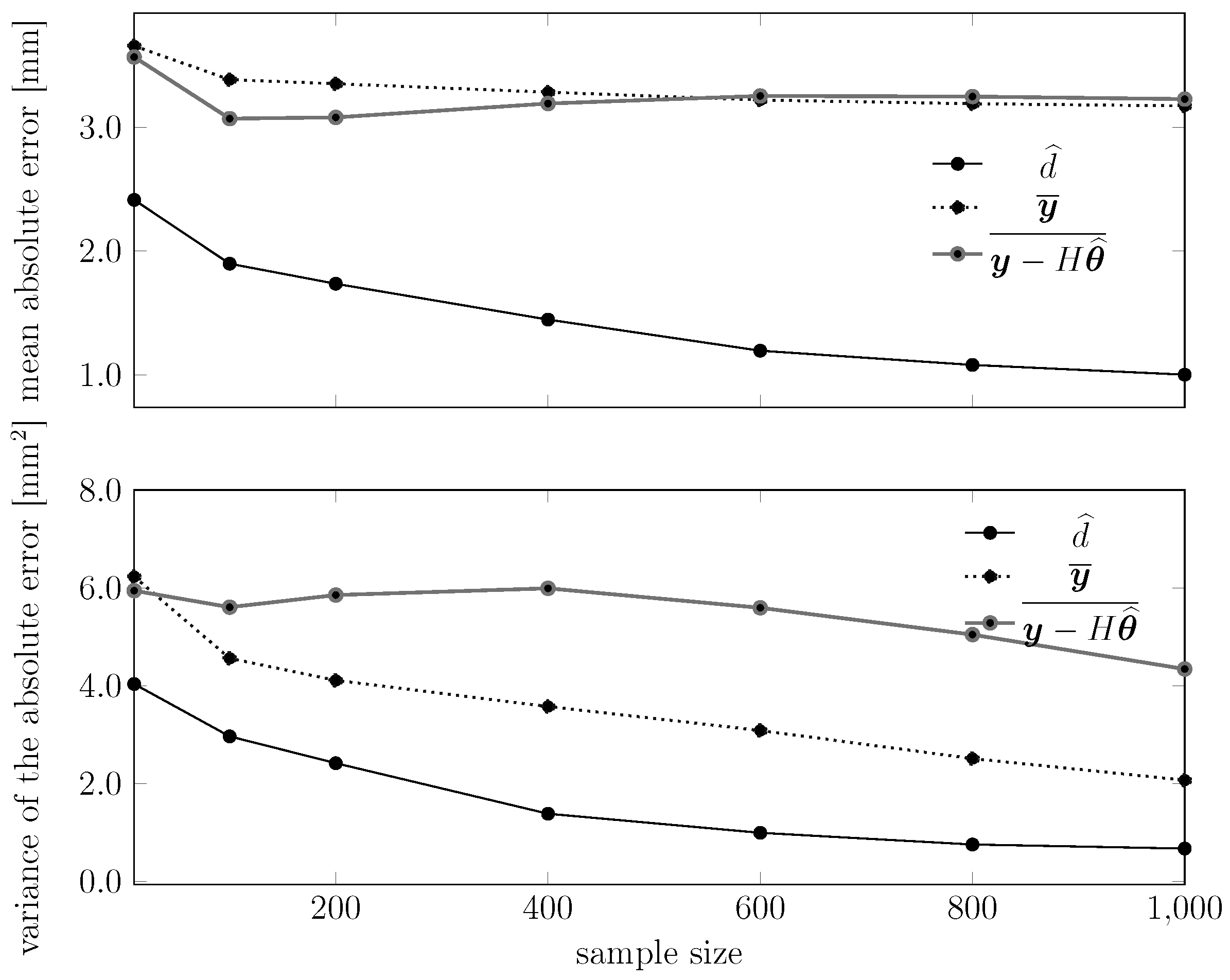
8.3. Assessment of the Performance Improvement for the SICK 200 LiDAR


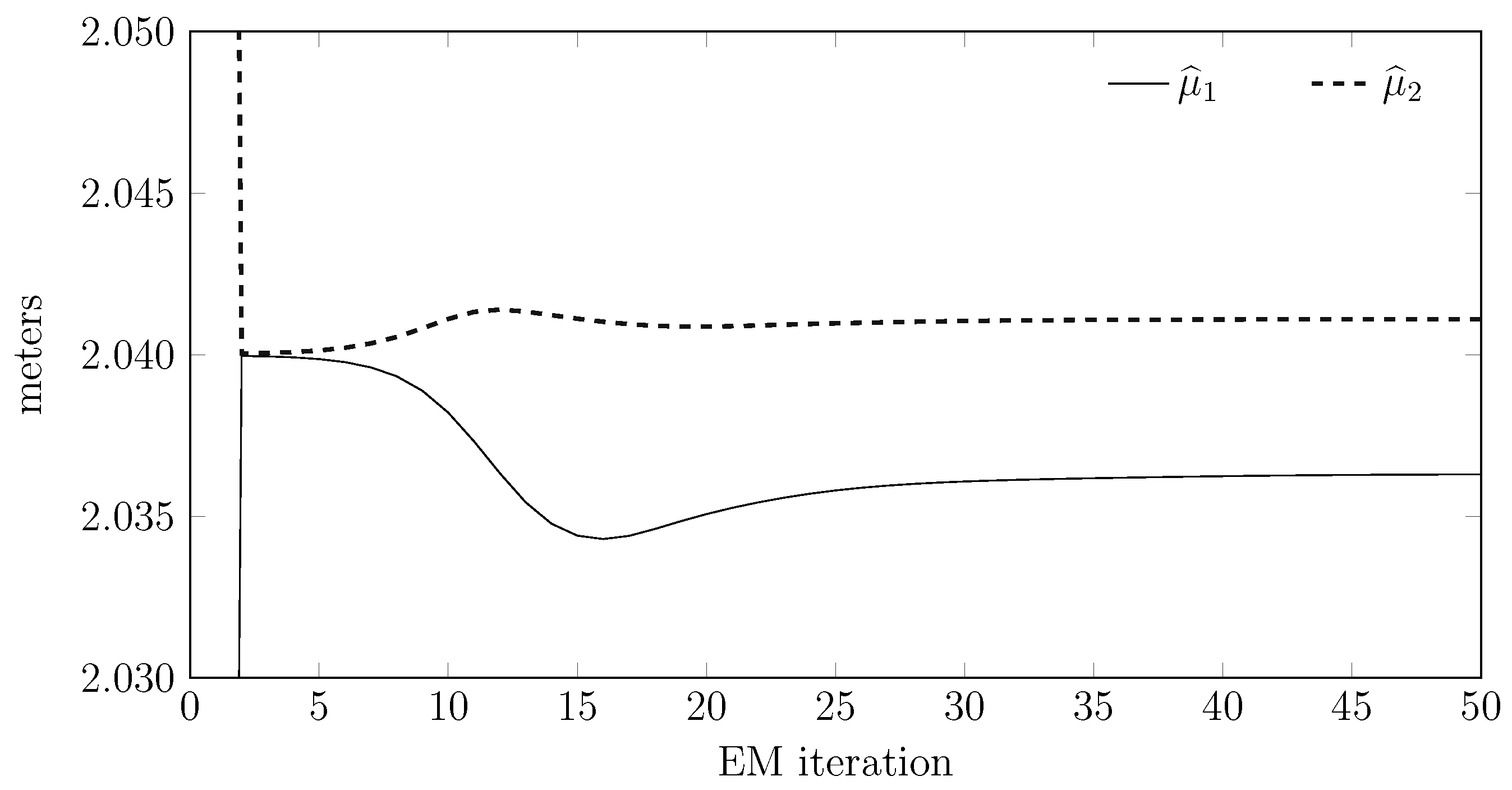
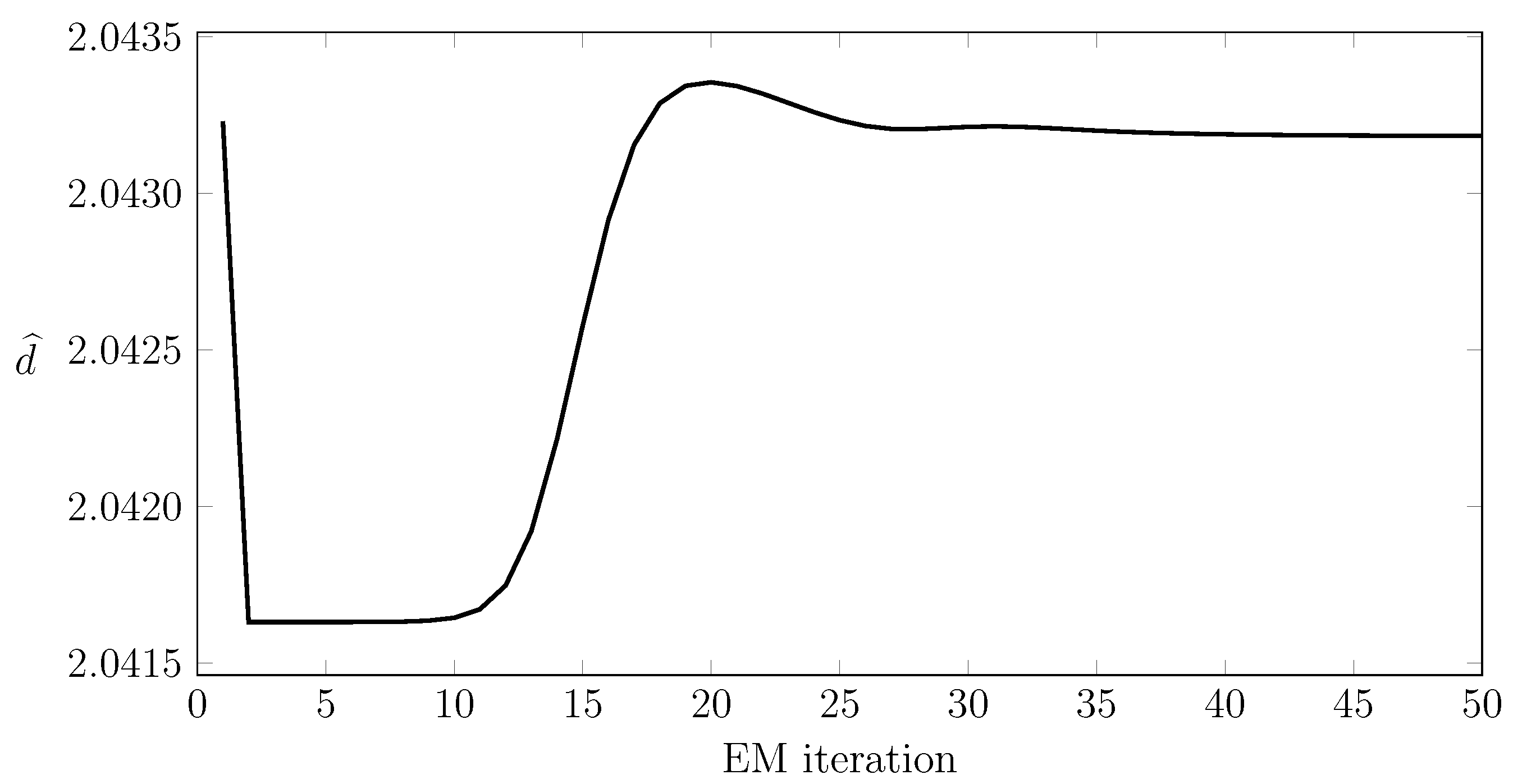
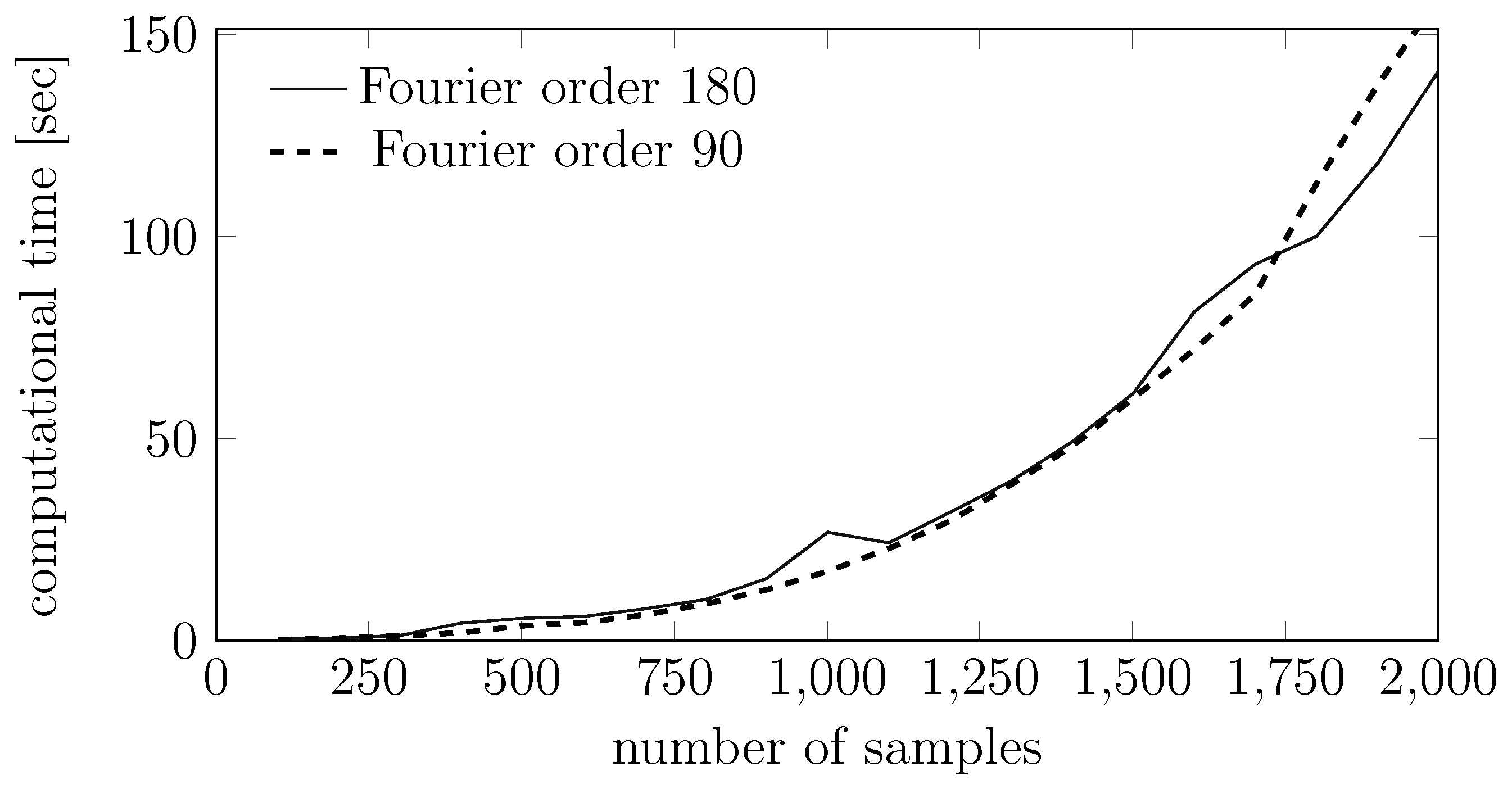
8.4. Convergence Properties for the EM Algorithms





9. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix
References
- One Photon Per Pixel Produces 3-D LiDAR Image. 2013. Available online: www.photonics.com (accessed on 8 December 2015).
- Pulse Ranging Technology (PRT)—Highly Accurate Positioning over Large Distances. Available online: www.pepperl-fuchs.us (accessed on 8 December 2015).
- Hebert, M.; Krotkov, E. 3-D measurements from imaging laser radars: How good are they? In Proceedings of the IEEE/RSJ International Workshop on Intelligent Robots and Systems’ 91. Intelligence for Mechanical Systems (IROS’91), Osaka, Japan, 3–5 November 1991; pp. 359–364.
- Reina, A.; Gonzales, J. Characterization of a radial laser scanner for mobile robot navigation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, (IROS’97), Grenoble, France, 6 Septembre 1997; pp. 579–585.
- Matko, V. Next generation AT-cut quartz crystal sensing devices. Sensors 2011, 11, 4474–4482. [Google Scholar] [CrossRef] [PubMed]
- Semiconductor, O.O. Pulsed Laser Diode in Plastic Package 25 W Peak Power SPL PL90. In Data sheet, OSRAM Opto Semiconductor; OSRAM Opto Semiconductors GmbH: Regensburg, Germany, 2014; pp. 244–248. [Google Scholar]
- Hawkes, J.; Latimer, I. Lasers: Theory and Practice; Prentice Hall: Maylands Ave, UK, 1995. [Google Scholar]
- Paschotta, R. Article on “Mode Hopping” in the Encyclopedia of Laser Physics and Technology; Wiley-VCH: Weinheim, Germany, 2008. [Google Scholar]
- Tell, B.; Brown-Goebeler, K.; Leibenguth, R.; Baez, F.; Lee, Y. Temperature dependence of GaAs-AlGaAs vertical cavity surface emitting lasers. Appl. Phys. Lett. 1992, 60, 683–685. [Google Scholar] [CrossRef]
- Ljung, L. System Identification: Theory for the User; Prentice-Hall Information and System Sciences Series; Prentice Hall PTR: Englewood Cliff, NJ, USA, 1999. [Google Scholar]
- Paschotta, R. Article on “laser Diodes” in the Encyclopedia of Laser Physics And Technology; Wiley-VCH: Weinheim, Germany, 2008. [Google Scholar]
- Anderson, B.D.; Moore, J.B. Optimal Filtering; In Courier Corporationz; Dover Publications, Inc.: Mineola, NY, USA, 2012. [Google Scholar]
- Dempster, A.P.; Laird, N.M.; Rubin, D.B. Maximum likelihood from incomplete data via the EM algorithm. J. R. Stat. Soc. Ser. B Methodol. 1977, 39, 1–38. [Google Scholar]
- McLachlan, G.; Peel, D. Finite Mixture Models; John Wiley & Sons: NY, USA, 2004. [Google Scholar]
- Vaida, F. Parameter convergence for EM and MM algorithms. Stat. Sin. 2005, 15, 831–835. [Google Scholar]
- Basseville, M.; Nikiforov, I.V. Detection of Abrupt Changes: Theory and Application; Prentice Hall Englewood Cliffs: Englewood Cliff, NJ, USA, 1993. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alhashimi, A.; Varagnolo, D.; Gustafsson, T. Joint Temperature-Lasing Mode Compensation for Time-of-Flight LiDAR Sensors. Sensors 2015, 15, 31205-31223. https://doi.org/10.3390/s151229854
Alhashimi A, Varagnolo D, Gustafsson T. Joint Temperature-Lasing Mode Compensation for Time-of-Flight LiDAR Sensors. Sensors. 2015; 15(12):31205-31223. https://doi.org/10.3390/s151229854
Chicago/Turabian StyleAlhashimi, Anas, Damiano Varagnolo, and Thomas Gustafsson. 2015. "Joint Temperature-Lasing Mode Compensation for Time-of-Flight LiDAR Sensors" Sensors 15, no. 12: 31205-31223. https://doi.org/10.3390/s151229854
APA StyleAlhashimi, A., Varagnolo, D., & Gustafsson, T. (2015). Joint Temperature-Lasing Mode Compensation for Time-of-Flight LiDAR Sensors. Sensors, 15(12), 31205-31223. https://doi.org/10.3390/s151229854