
Human Computer Interactions in Next-Generation of Aircraft Smart Navigation Management Systems: Task Analysis and Architecture under an Agent-Oriented Methodological Approach

 and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (a)
- New coordination procedures for distributed decision-making processes in order to make aircraft preferred trajectories compatible with a well-organized air traffic [10,11,12,13]. It requires the definition of new roles of the Smart Air Traffic System (SATS) agents and specific communication protocols for automated processes such as: (i) air-ground and air-air trajectories negotiation; (ii) managing shared information from aircraft and air traffic service providers; (iii) monitoring aircraft states and intentions from airborne (or navigation) and from ground (or air traffic control) perspectives; and (iv) solving unexpected events during the procedure execution.
- (b)
- New HCI designs that allow SATS users (mainly aircrew, air traffic controllers) to carry out their respective tasks for different automation levels [14,15] of above procedures. In addition, these HCI require using top-level languages to achieve a precise intercommunication of trajectory-related information between aircraft systems and ground systems. These languages should enable human-readable comprehension of inter-machine communication processes [16].
- (c)
- New underlying mathematical models and algorithms required by the mentioned air and ground systems. These represent the computational side of HCI and they must implement several functions related to the management of trajectory and parallel decision-making processes (e.g., trajectory synthesis and prediction [17,18,19], trajectory conflict detection and resolution [20,21], on-board four-dimensional trajectory guidance [22], etc.). Data used by these models provide mainly from sensors inputs, intercommunication systems and human-machine interfaces (HMI) [23,24].
1.1. Previous Works
1.2. Our Working Approach
- (a)
- highly detailed guidelines for the initial system specifications;
- (b)
- the modularity of the agents’ internal architecture supported by the concept of capabilities (so creating a direct relationship between the description of these capabilities and the functionalities/functions of different aircraft and ground systems); and
- (c)
1.3. Paper Organization
2. Applying Agent Methodology for Modeling Smart Air Traffic Scenarios

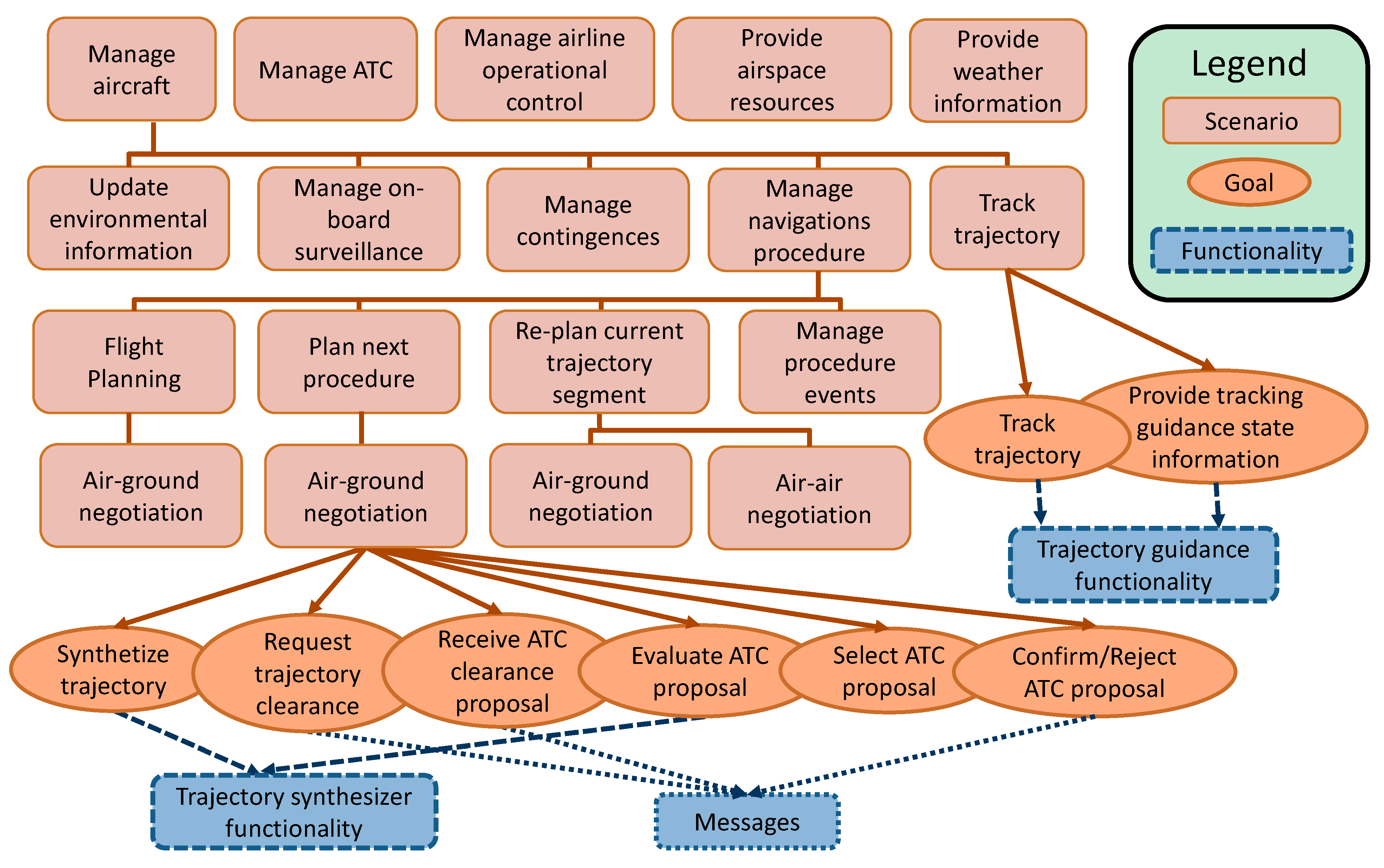
2.1. System Specification

- Planning, when procedural tasks are intended to calculate and negotiate the trajectory.
- Executing, when procedural tasks manage parameters of a running trajectory.
- Re-planning: tasks that are aimed at performing a trajectory modification to resolve contingences that arise during a procedure.

- (a)
- Plan Flight-Plan scenario including calculation and communication processes in order to plan the flight trajectory for the overall flight (i.e., obtaining initial data for trajectory and time-space constraints to negotiate updated trajectories for each flight phase).
- (b)
- Plan Next Procedure scenario that performs/implements the trajectory planning process to update the trajectory and other attributes for the next flight phase.
- (c)
- The Re-Plan Current Procedure scenario that performs partial modifications for the current trajectory in current flight phase when airborne contingences arise.
- (d)
- Manage Procedure Events scenario that analyzes the current procedure and generates events to implement trajectories (or partial trajectory modifications) and initiate the next procedural planning.
2.2. Architecture Design
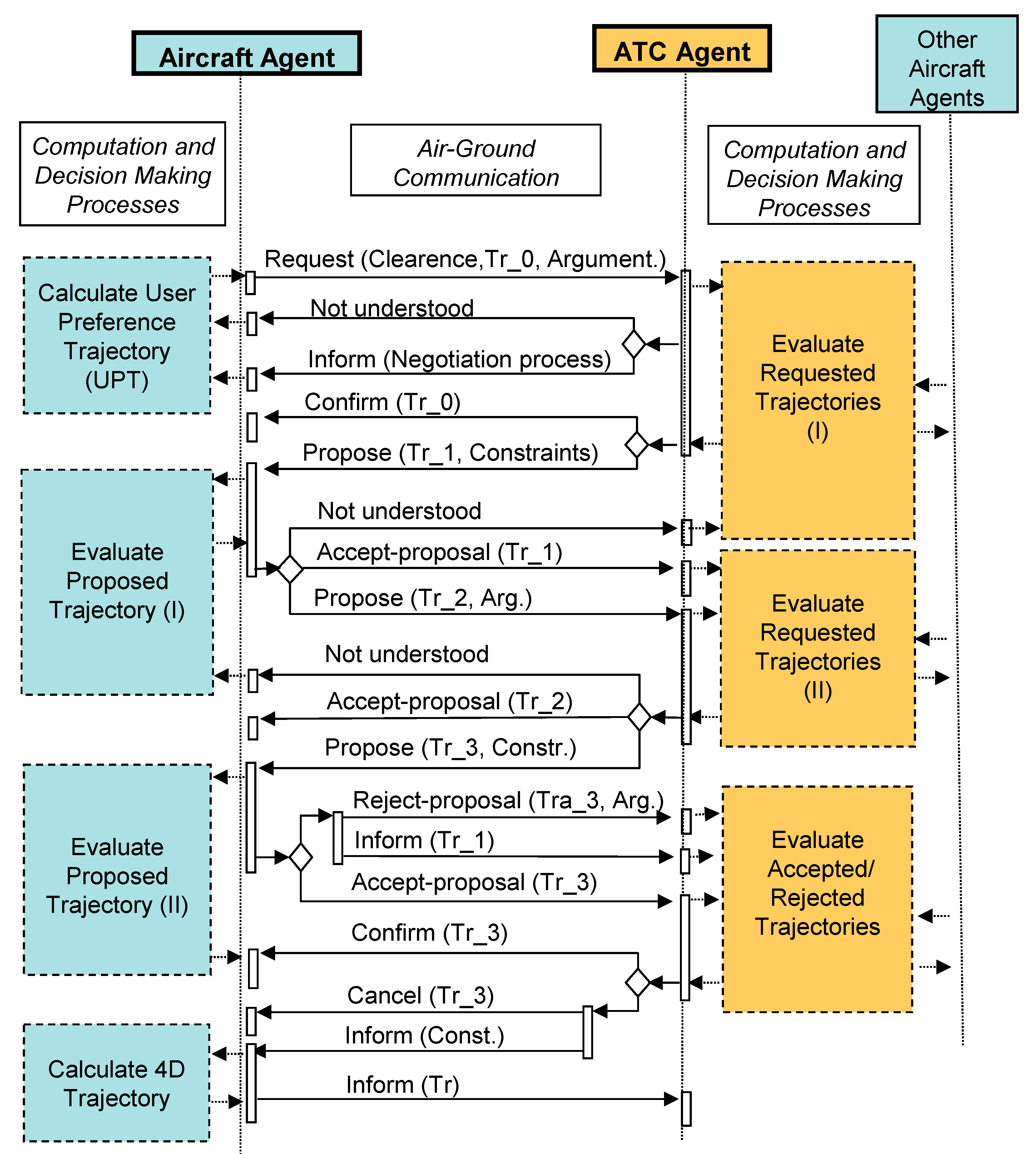
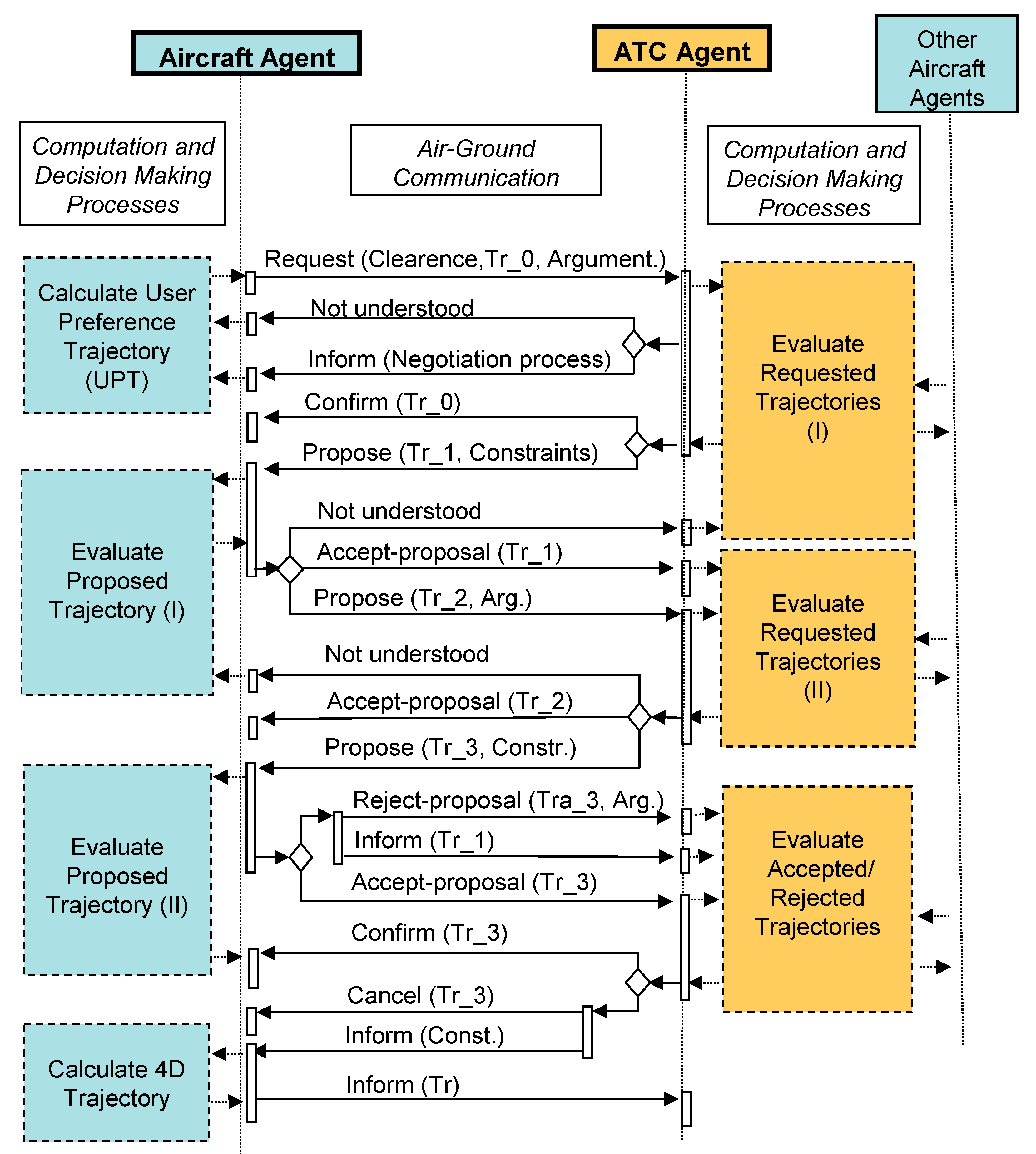
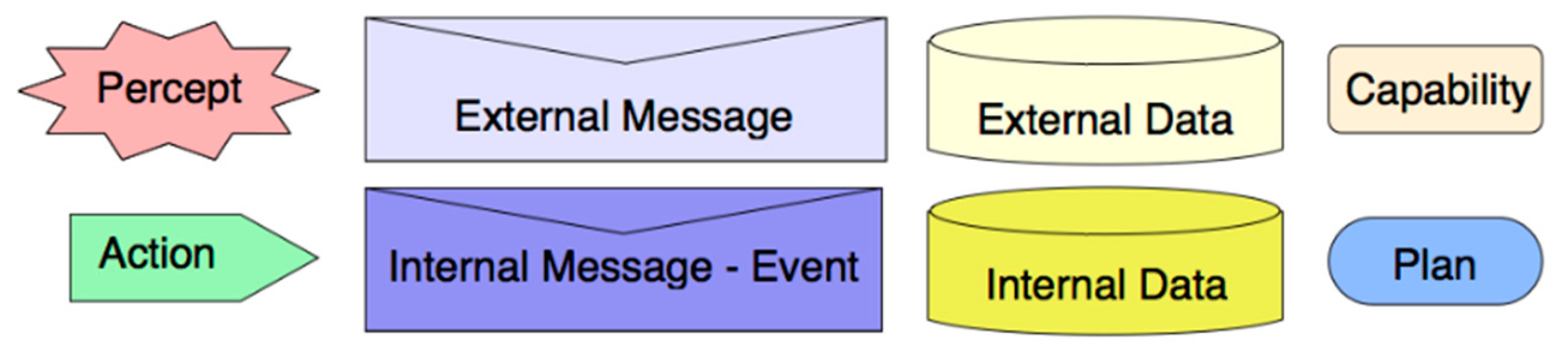
- The overall system structure (static) can be depicted in a system overview diagram that links agents, showing interaction protocol names, data used by each agent as well as agent percepts and actions.

- Request clearance to perform its preferred trajectory and arguments.
- Accept or reject ATC trajectory proposals.
- Perform counter-proposals to ATC agent.
- Inform about content of final decision adopted.
- Confirm trajectories requested by aircraft.
- Propose alternative requested trajectories.
- Accept or reject aircraft proposals.
- Inform about specific content of the final decision adopted.
2.3. Detailed Design
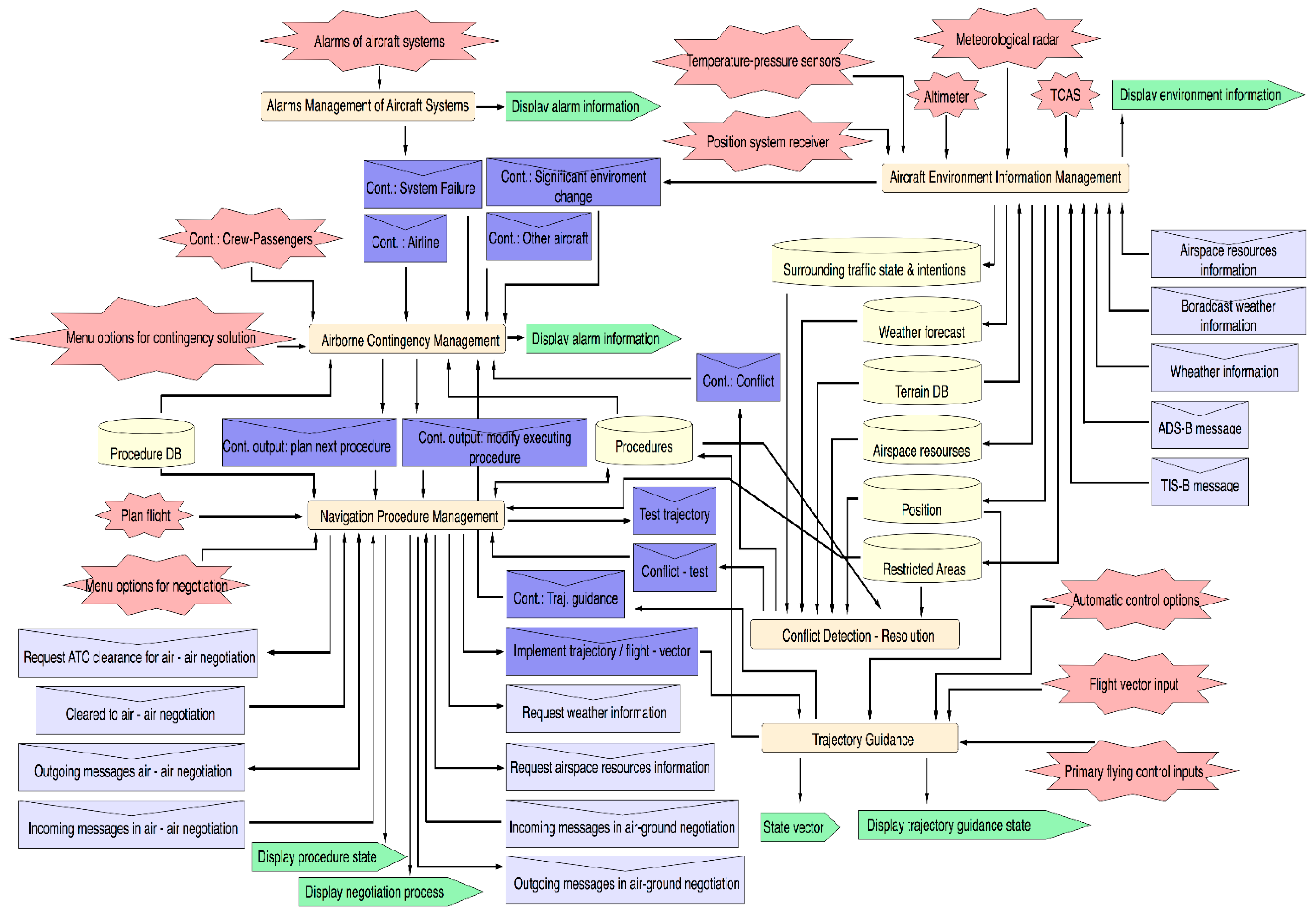
3. Aircraft Agent Design: Main On-Board Capabilities
- (a)
- Aircraft Environment Information Management.
- (b)
- Aircraft Systems Alarm Management.
- (c)
- Conflict Detection-Resolution.
- (d)
- Airborne Contingency Management.
- (e)
- Trajectory Guidance.
- (f)
- Navigation Procedures Management.
3.1. Navigation Procedures Management


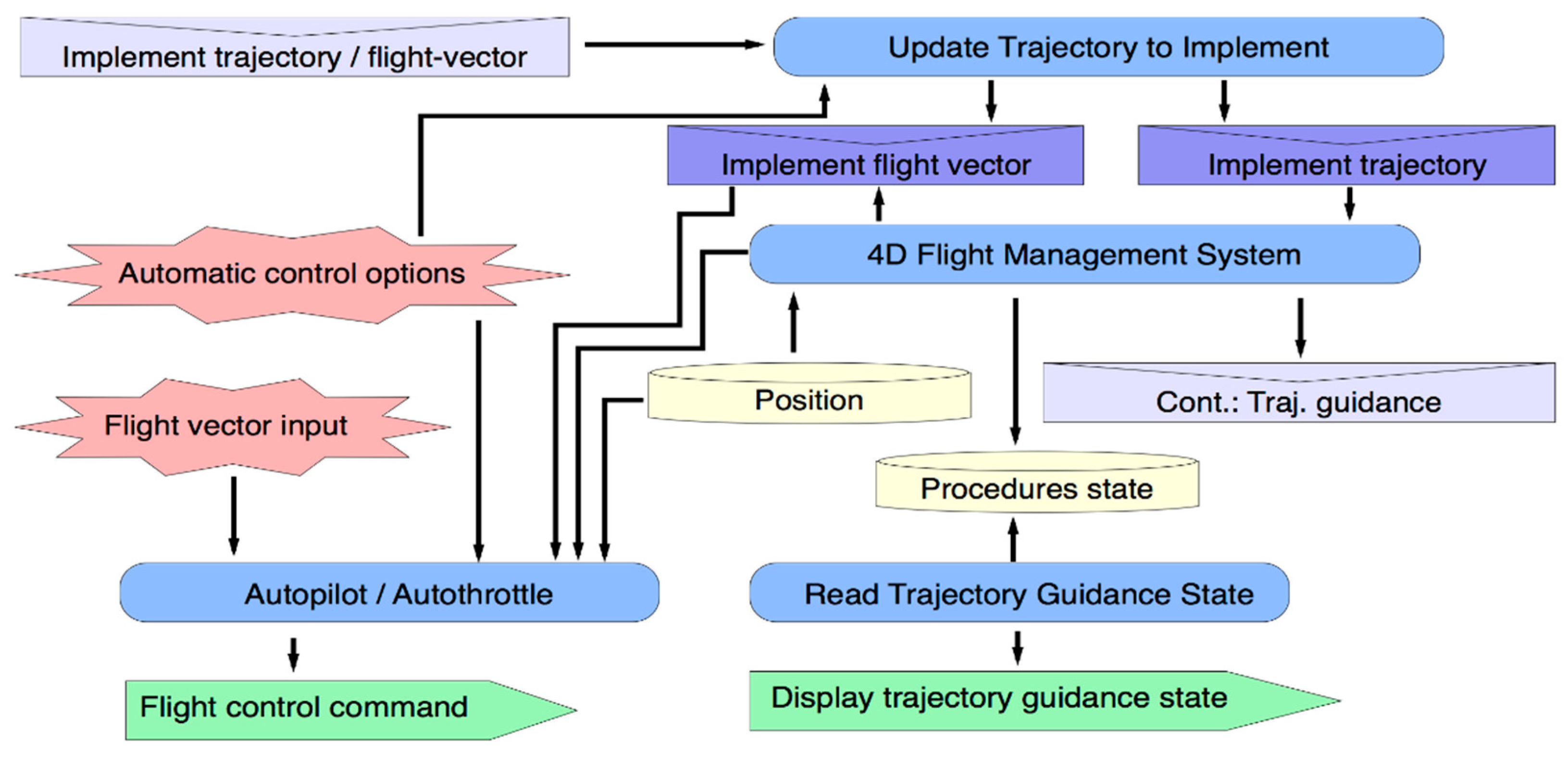
3.2. Trajectory Guidance
3.3. Aircraft Environment Information Management
3.4. Conflict Detection-Resolution
3.5. Airborne Contingency Management
- Contingency of critical environmental changes.
- System failure contingency, indicating failure details as well as the proposed procedure, maneuver or actions according to normal, abnormal or emergency procedures.
- Conflict contingency, including information about solutions proposed by the conflict detection-resolution capability.
- Contingency from other aircraft (i.e., requirements from other aircraft asking to solve conflicts, to modify arrival sequence, etc.).
- Airline contingency, asking to modify intended flight plan.
- Contingency from ATC (e.g., changes regarding previous agreement).
- Contingency related to an unexpected emergency due to crew or passengers defined through an on-board options menu.
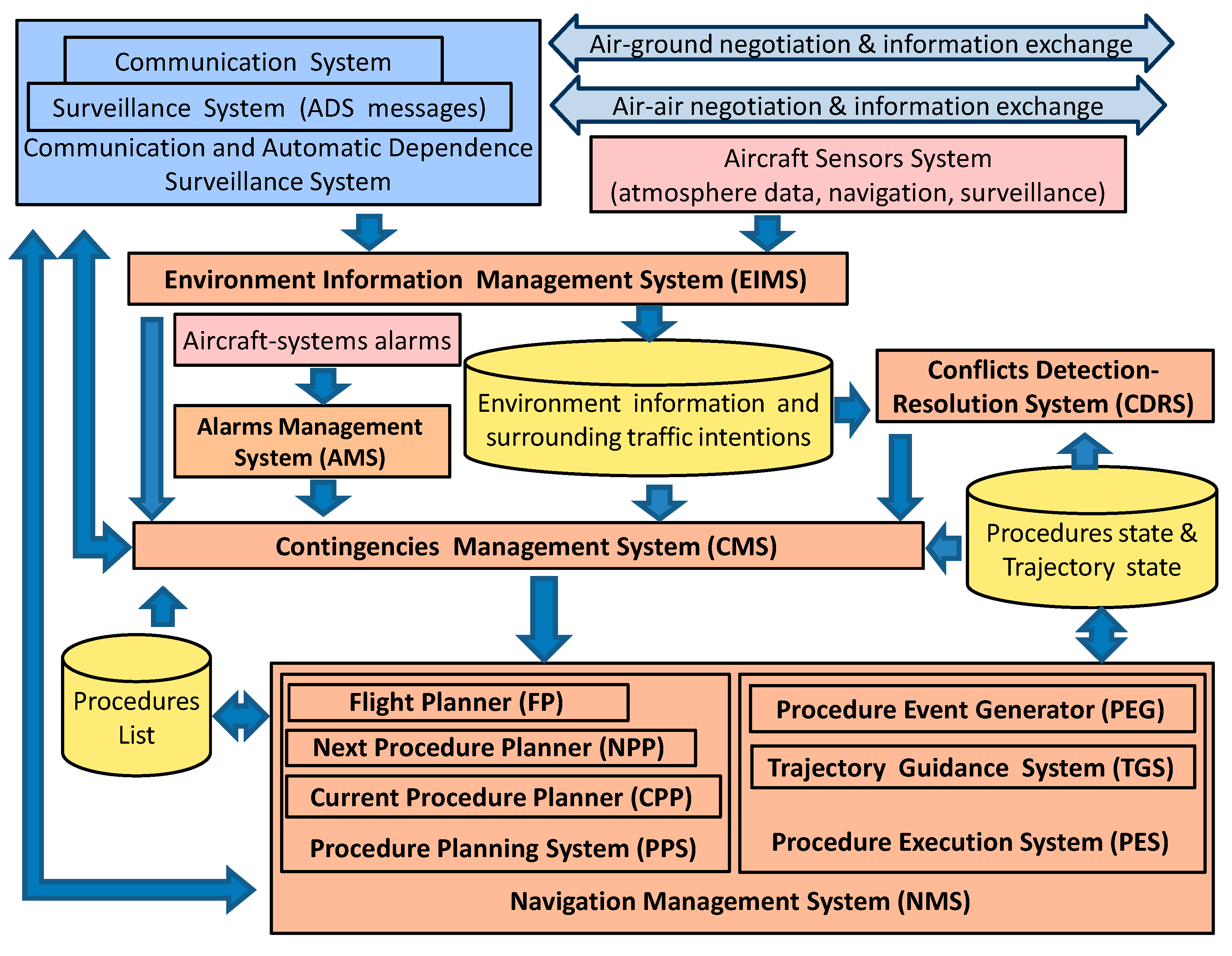
4. From On-Board Capabilities to Cockpit HCI System Architecture
- (a)
- Environment and Surrounding Traffic Information.
- (b)
- Procedures List.
- (c)
- Procedures State.

- (a)
- Navigation Management System.
- (b)
- Contingency Management System.
- (c)
- Environmental Information Management System.
- (d)
- Alarm Management System.
- (e)
- Conflict Detection Resolution System.
- (f)
- Communication and ADS System.
- The Procedure Planning System supports full procedure planning processes (that includes air-ground and air-air negotiation, requesting environment information, etc.) versus functionalities of current FMS for computing route parameters.
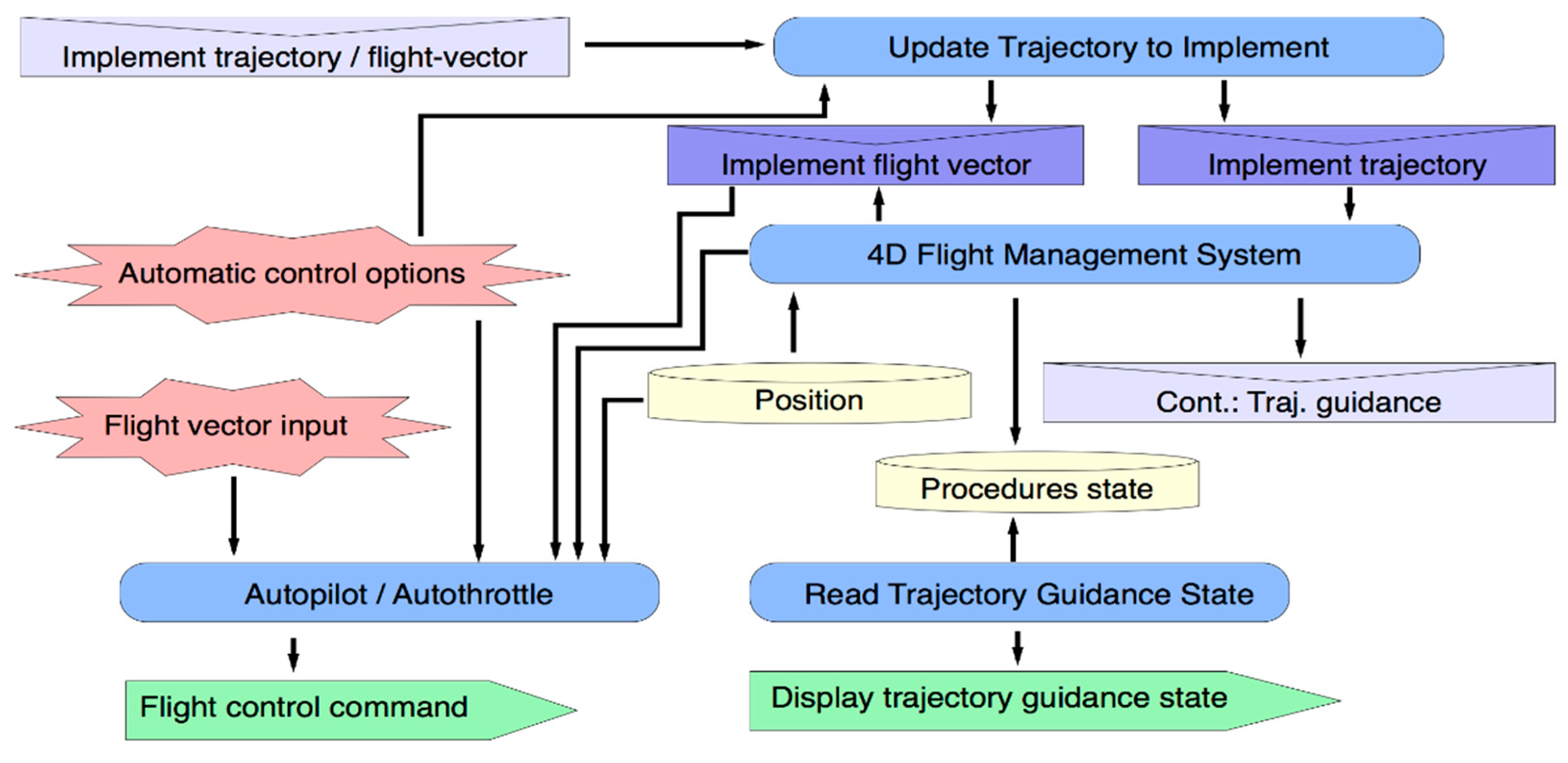
- The Procedure Execution System extends (through Trajectory Guidance System) the current flight plan guidance functionality of AP/AT to provide new functionalities for 4D-trajectory guidance, as is shown in Figure 9. The Procedure-Event Generator also represents a new level of information about an on-board HCI state for managing executing procedure and initiating new planning processes.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Nolan, M. Fundamentals of Air Traffic Control, 5th ed.; Cengage Learning: Boston, MA, USA, 2010. [Google Scholar]
- Boeing, C.A. Global Market Forecast 2014–2034; Market Analysis: Seattle, WA, USA, 2014. [Google Scholar]
- FAA. FAA Aerospace Forecast 2013–2032. Available online: http://www.aia-aerospace.org/assets/FAA_2013_to_2033_Aerospace_Forecast.pdf (accessed on 20 October 2014).
- ICAO. Global Air Navigation Plan for CNS/ATM Systems (Doc 9750 AN/963). Available online: http://www.icao.int/publications/Documents/9750_2ed_en.pdf (accessed on 20 September 2014).
- Ashford, N.J.; Mumayiz, S.; Wright, P.H. CNS/ATM. In Airport Engineering: Planning, Design, and Development of 21st Century Airports, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2011; pp. 179–233. [Google Scholar]
- Teutsch, J.; Hoffman, E. Aircraft in the Future ATM System-Exploiting the 4D Aircraft Trajectory. In Proceedings of the Digital Avionics Systems Conference, Salt Lake City, UT, USA, 24–28 October 2004; Volume 1, pp. 1.B.2.1–1.B.2.1.22.
- Concept of Operations for the Next Generation Air Transportation System, Version 3.3; Joint Planning and Development Office (NexGen): Washington, DC, USA, 2007. Available online: http://www.dtic.mil/dtic/tr/fulltext/u2/a535795.pdf (accessed on 20 October 2014).
- Brooker, P. SESAR and NextGen: Investing in new paradigms. J. Navig. 2008, 61, 195–208. [Google Scholar] [CrossRef]
- Undertaking S. J. European ATM Master Plan; SESAR Joint Undertaking: Brussels, Belgium, 2012, 2nd ed. Available on line: https://www.google.es/#q=Undertaking.+European+ATM +Master+Plan (accessed on 10 January 2015).
- Green, S.M.; Milimoria, K.D.; Ballin, M.G. Distributed Air/Ground Traffic Management for En-Route Flight Operations. In Proceedings of the Air Traffic Control Quarterly, Denver, CO, USA, 14–17 August 2000; Volume 9.
- Lee, P.; Mercer, J.; Martin, L.; Prevot, T.; Shelden, S.; Verma, S.; Palmer, E. Free Maneuvering, Trajectory Negotiation, and Self-Spacing Concepts in Distributed Air-Ground Traffic Management; USA/Europe Air Traffic Management R&D Seminar: Budapest, Hungary, 2003. [Google Scholar]
- Lyons, R. Complexity analysis of the Next Gen Air Traffic Management System: Trajectory based operations. Work 2012, 41, 4514–4522. [Google Scholar] [PubMed]
- Landry, S.J. Human centered design in the air traffic control system. J. Intell. Manuf. 2011, 22, 65–72. [Google Scholar] [CrossRef]
- Jackson, M.R. Role of Avionics in Trajectory-Based Operations. IEEE A&E Syst. Mag. 2010, 25, 12–19. [Google Scholar] [CrossRef]
- Prevot, T.; Homola, J.R.; Martin, L.H.; Mercer, J.S.; Cabrall, C.D. Toward Automated Air Traffic Control—Investigating a Fundamental Paradigm Shift in Human/Systems Interaction. Int. J. Hum. Comput. Interact. 2012, 28, 77–98. [Google Scholar] [CrossRef]
- Frontera, G.; Besada, J.A.; Bernardos, A.M.; Casado, E.; López-Leonés, J. Formal Intent-Based Trajectory Description Languages. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1550–1566. [Google Scholar] [CrossRef]
- Slattery, R.; Zhao, Y. Trajectory synthesis for air traffic automation. J. Guid. Control Dyn. 1997, 20, 232–238. [Google Scholar] [CrossRef]
- Lymperopoulos, I.; Lygeros, J. Improved multi-aircraft ground trajectory prediction for air traffic control. J. Guid. Control Dyn. 2010, 33, 347–362. [Google Scholar] [CrossRef]
- Tancredi, U.; Accardo, D.; Fasano, G.; Renga, A.; Rufino, G.; Maresca, G. An Algorithm for Managing Aircraft Movement on an Airport Surface. Algorithms 2013, 6, 494–511. [Google Scholar] [CrossRef]
- Kuchar, J.K.; Yang, L.C. A review of conflict detection and resolution modeling methods. IEEE Trans. Intell. Transp. Syst. 2000, 1, 179–189. [Google Scholar] [CrossRef]
- Pallottino, L.; Feron, E.M.; Bicchi, A. Conflict resolution problems for air traffic management systems solved with mixed integer programming. IEEE Trans. Intell. Transp. Syst. 2002, 3, 3–11. [Google Scholar] [CrossRef]
- Medagoda, E.D.; Gibbens, P.W. Synthetic-waypoint guidance algorithm for following a desired flight trajectory. J. Guid. Control Dyn. 2010, 33, 601–606. [Google Scholar] [CrossRef]
- Cho, T.; Lee, C.; Choi, S. Multi-sensor fusion with interacting multiple model filter for improved aircraft position accuracy. Sensors 2013, 13, 4122–4137. [Google Scholar] [CrossRef] [PubMed]
- Jan, S.S. Vertical guidance performance analysis of the L1-L5 dual-frequency GPS/WAAS user avionics sensor. Sensors 2010, 10, 2609–2625. [Google Scholar] [CrossRef] [PubMed]
- Carroll, J.M. HCI Models, Theories, and Frameworks: Toward a Multidisciplinary Science; Carroll, J.M., Ed.; Morgan Kaufmann Publishers: San Francisco, CA, USA, 2010. [Google Scholar]
- Kaptelinin, V. Activity Theory. Encyclopedia of Human-Computer Interaction; Soegaard, M., Dam, R.F., Eds.; The Interaction Design Foundation: Aarhus, Denmark, 2012, 2nd ed. Available on line: https://www.interaction-design.org/encyclopedia/activity_theory.html (accessed on 10 January 2015).
- Sorensen, J.A. Detailed Description for CE-11,Terminal Arrival: Self Spacing for Merging and In-trail Separation; Contractor Report NAS2–98005 RTO-412000; NASA Ames Research Center and NASA and Langley Research Center: Moffett Field, CA, USA; Hampton, VA, USA, 2002. [Google Scholar]
- Prevot, T.; Homola, J.; Mercer, J.; Mainini, M.; Cabrall, C. Initial Evaluation of NextGen Air/Ground Operations with Ground-Based Automated Separation Assurance. In Proceedings of the 8th USA/Europe Air Traffic Management Research and Development Seminar, Napa, CA, USA, 29 June–02 July 2009.
- Ballin, M.G.; Hoekstra, J.M.; Wing, D.J.; Lohr, G. NASA Langley and NLR Research of Distributed Air/Ground Traffic Management. In Proceedings of the AIAA’s Aircraft Technology, Integration, and Operations (ATIO) 2002 Technical Forum, Los Angeles, CA, USA, 3 October 2002; Volume 5826.
- Vu, K.P.L.; Strybel, T.Z.; Battiste, V.; Lachter, J.; Dao, A.Q.; Brandt, S.; Ohnson, W. Pilot performance in trajectory-based operations under concepts of operation that vary separation responsibility across pilots, air traffic controllers, and automation. Int. J. Hum. Comput. Interact. 2012, 28, 107–118. [Google Scholar] [CrossRef]
- Brooker, P. Airborne Separation Assurance Systems: Towards a work programme to prove safety. Saf. Sci. 2004, 42, 723–754. [Google Scholar] [CrossRef] [Green Version]
- Ellerbroek, J.; Visser, M.; van Dam, S.B.; Mulder, M.; van Paassen, M.M. Design of an airborne three-dimensional separation assistance display. IEEE Trans. Man Cybern. Part A 2011, 41, 863–875. [Google Scholar] [CrossRef]
- Suarez, B.; Kirk, K.; Theunissen, E. Development, Integration and Testing of a Stand-Alone CDTI with Conflict Probing Support. In Proceedings of the AIAA Infotech@ Aerospace Conference, Garden Grove, CA, USA, 19–21 June 2012; Volume 2487.
- Ramasamy, S.; Sabatini, R.; Gardi, A.; Liu, Y. Novel Flight Management System for Real-Time 4-Dimensional Trajectory Based Operations. In Proceedings of the AIAA GNC 2013 Conference, London (USA), Boston, MA, USA, 19–22 August 2013.
- Brooker, P. A 4D ATM Trajectory Concept Integrating GNSS and FMS. J. Navig. 2014, 67, 617–631. [Google Scholar] [CrossRef]
- Mueller, E.; Sandy, L. Experimental Evaluation of an Integrated Datalink and Automation-Based Strategic Trajectory Concept. In Proceedings of the 7th American Institute of Aeronautics and Astronautics (AIAA) Aviation Technology, Belfast, Northern Ireland, 18–20 September 2007.
- Klooster, J.; Torres, S.; Earman, D.; Castillo-Effen, M.; Subbu, R.; Kammer, L.; Tomlinson, T. Trajectory Synchronization and Negotiation in Trajectory Based Operations. In Proceedings of the IEEE/AIAA 29th Digital Avionics Systems Conference (DASC), Salt-Lake City, UT, USA, 3–7 October 2010; pp. 1.A.3.1–1.A.3.11.
- Besada, J.A.; Frontera, G.; Crespo, J.; Casado, E.; López-Leonés, J. Automated Aircraft Trajectory Prediction Based on Formal Intent-Related Language Processing. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1067–1082. [Google Scholar] [CrossRef]
- Treleaven, K.; Mao, Z.H. Conflict resolution and traffic complexity of multiple intersecting flows of aircraft. IEEE Trans. Intell. Transp. Syst. 2008, 9, 633–643. [Google Scholar] [CrossRef]
- Devasia, S.; Iamratanakul, D.; Chatterji, G.; Meyer, G. Decoupled conflict-resolution procedures for decentralized air traffic control. IEEE Trans. Intell. Transp. Syst. 2011, 12, 422–437. [Google Scholar] [CrossRef]
- Prevôt, T.; Mercer, J. MACS: A Simulation Platform for Today’s and Tomorrow’s Air Traffic Operations. In Proceedings of the AIAA Modeling and Simulation Technologies Conference and Exhibit, Hilton Head, S.C., USA, 20–23 August 2007.
- Quon, L. Modeling and Simulation Needs for Next Generation Air Transportation System Research. In Proceedings of the AIAA Modeling and Simulation Technologies Conference and Exhibit, Keystone, CO, USA, 22 August 2006; pp. 21–24.
- Graham, R.; Young, D. Preparing an Initial Assessment of the SESAR Concept of Operations “EP3: Single European Sky Implementation Support through Validation”; Technical Report; Eurocontrol Experimental Centre: Brétigny-sur-Orge, France, 2006. [Google Scholar]
- Alam, S.; Abbass, H.A.; Barlow, M. Atoms: Air traffic operations and management simulator. IEEE Trans. Intell. Transp. Syst. 2008, 9, 209–225. [Google Scholar] [CrossRef]
- Chen, B.; Cheng, H.H. A review of the applications of agent technology in traffic and transportation systems. IEEE Trans. Intell. Transp. Syst. 2010, 11, 485–497. [Google Scholar] [CrossRef]
- Molina, M.; Carrasco, S.; Martin, J. Agent-Based Modeling and Simulation for the Design of the Future European Air Traffic Management System: The Experience of CASSIOPEIA. Highlights of Practical Applications of Heterogeneous Multi-Agent Systems. PAAMS Collect. Commun. Comput. Inf. Sci. 2014, 430, 22–33. [Google Scholar]
- J. Callantine, J.; Homola, J.; Mercer, T. Prevot, Concept Investigation via Air-Ground Simulation with Embedded Agents. In Proceedings of the AIAA Modeling and Simulation Technologies Conference and Exhibit, Keystone, CO, USA, 22 August 2006.
- Feigh, K.M.; Pritchett, A.R.; Shah, A.P.; Kalaver, S.A.; Jadhav, A.; Holl, D.M.; Gilgur, A.Z. Analyzing Air Traffic Management Systems Using Agent-Based Modeling and Simulation; Georgia Institute of Technology: Baltimore, MD, USA, 2005. [Google Scholar]
- Agogino, A.K.; Tumer, K. A multi-agent approach to managing air traffic flow. Auton. Agents Multi-Agent Syst. 2012, 24, 1–25. [Google Scholar] [CrossRef] [Green Version]
- Fuentes-Fernández, R.; Guijarro, M.; Pajares, G. A multi-agent system architecture for sensor networks. Sensors 2009, 9, 10244–10269. [Google Scholar] [CrossRef] [PubMed]
- Carroll, J.M. Making Use: Scenario-Based Design of Human-Computer Interactions; MIT Press: Cambridge, MA, USA, 2000. [Google Scholar]
- Sturm, A. The Landscape of Agent-Oriented Methodologies. Agent-Oriented Software Engineering: Reflections on Architectures, Methodologies, Languages, and Frameworks; Springer: Berlin/Heidelberg, Germany, 2014; pp. 137–154. [Google Scholar]
- Li, S.; Wang, J.; Luo, X.; Guan, X. A new framework of consensus protocol design for complex multi-agent systems. Syst. Control Lett. 2001, 60, 19–26. [Google Scholar] [CrossRef]
- Gascuena, J.M.; Fernández-Caballero, A. Prometheus and INGENIAS Agent Methodologies: A Complementary Approach; Agent-Oriented Software Engineering IX; Springer: Berlin/Heidelberg, Germany, 2009; pp. 131–144. [Google Scholar]
- Sturm, A.; Shehor, O. A Framework for Evaluating Agent-Oriented Methodologies. Lect. Notes Comput. Sci. 2004, 3030, 94–109. [Google Scholar]
- Padgham, L.; Winikoff, M. Developing Intelligent Agent Systems: A Practical Guide; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Padgham, L.; Thangarajah, J.; Winikoff, M. Prometheus Research Directions. Agent-Oriented Software Engineering: Reflections on Architectures, Methodologies, Languages, and Frameworks; Springer: Berlin/Heidelberg, Germany, 2014; pp. 155–171. [Google Scholar]
- Luigi, F.; Caire, G.; Greenwood, D. Developing Multi-Agent Systems with JADE; Wiley Series in Agent Technology, Hardcover; Wiley: Hoboken, NJ, USA, 2007. [Google Scholar]
- Pokahr, A.; Braubach, L.; Lamersdorf, W. Jadex: A BDI Reasoning Engine. Multi-agent Programing, Springer: Berlin/Heidelberg, Germany, 2005; pp. 149–174. [Google Scholar]
- Winikoff, M. JACK TM intelligent agents: An industrial strength platform. In Multi-Agent Programming: Languages, Platforms and Applications; Springer: Berlin/Heidelberg, Germany, 2005; pp. 175–193. [Google Scholar]
- Collinson, R.P. Introduction to Avionics Systems; Springer: Berlin/Heidelberg, Germany, 2011; pp. 415–458. [Google Scholar]
- Shujun, L.; Kokar, M. Agent Communication Language. In Flexible Adaptation in Cognitive Radios; Springer: New York, NY, USA, 2013; pp. 37–44. [Google Scholar]
- Siebers, P.O.; Onggo, S. Graphical Representation of Agent-Based Models in Operational Research and Management Science Using UML. In Proceedings of the 7th Operation Research Society Simulation Conference, Worcestershire, UK, 1–2 April 2014; pp. 143–153.
- Foundation for Intelligent Physical Agents –FIPA- Standard Status Specifications. Available online: http://www.fipa.org/repository/standardspecs.html (accessed on 20 October 2014).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Canino-Rodríguez, J.M.; García-Herrero, J.; Besada-Portas, J.; Ravelo-García, A.G.; Travieso-González, C.; Alonso-Hernández, J.B. Human Computer Interactions in Next-Generation of Aircraft Smart Navigation Management Systems: Task Analysis and Architecture under an Agent-Oriented Methodological Approach. Sensors 2015, 15, 5228-5250. https://doi.org/10.3390/s150305228
Canino-Rodríguez JM, García-Herrero J, Besada-Portas J, Ravelo-García AG, Travieso-González C, Alonso-Hernández JB. Human Computer Interactions in Next-Generation of Aircraft Smart Navigation Management Systems: Task Analysis and Architecture under an Agent-Oriented Methodological Approach. Sensors. 2015; 15(3):5228-5250. https://doi.org/10.3390/s150305228
Chicago/Turabian StyleCanino-Rodríguez, José M., Jesús García-Herrero, Juan Besada-Portas, Antonio G. Ravelo-García, Carlos Travieso-González, and Jesús B. Alonso-Hernández. 2015. "Human Computer Interactions in Next-Generation of Aircraft Smart Navigation Management Systems: Task Analysis and Architecture under an Agent-Oriented Methodological Approach" Sensors 15, no. 3: 5228-5250. https://doi.org/10.3390/s150305228