
Stride Segmentation during Free Walk Movements Using Multi-Dimensional Subsequence Dynamic Time Warping on Inertial Sensor Data




Abstract
:
1. Introduction
2. Methods
2.1. Subjects and Measurement Protocols

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Template | Controls | PD Patients | Geriatric Patients | ||||
|---|---|---|---|---|---|---|---|
| Test | 40 m | 40 m | free walk | 40 m | free walk | 40 m | free walk |
| Subjects | 25 | 10 | 5 | 10 | 5 | 10 | 5 |
| Strides | 681 | 485 | 1286 | 496 | 1619 | 795 | 1249 |
| Gender (m:f) | 17:18 | 5:5 | 3:2 | 5:5 | 3:2 | 4:6 | 2:3 |
| Age (±SD) | 62.3 ± 11.6 | 64.0 ± 8.4 | 64.2 ± 10.0 | 63.8 ± 9.3 | 72.8 ± 6.3 | 81.0 ± 4.1 | 80.4 ± 5.9 |
| Hoehn & Yahr (±SD) | - | - | - | 1.7 ± 0.9 | 2.6 ± 0.5 | - | - |
| UPDRS motor score (±SD) | - | - | - | 12.7 ± 6.0 | 20.8 ± 6.1 | - | - |
2.2. Sensor System and Setup

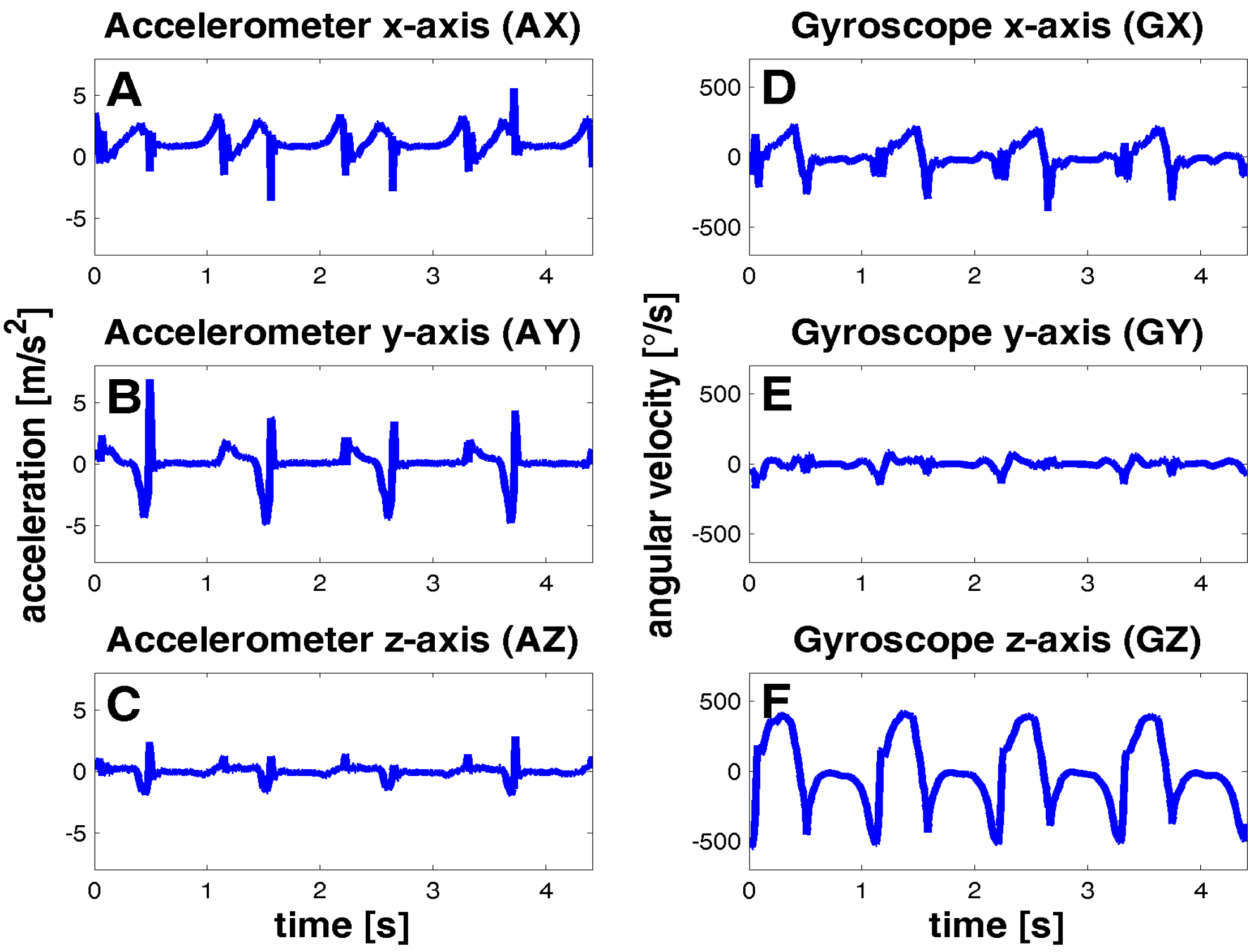
2.3. Sensor Signals and Manual Data Labeling
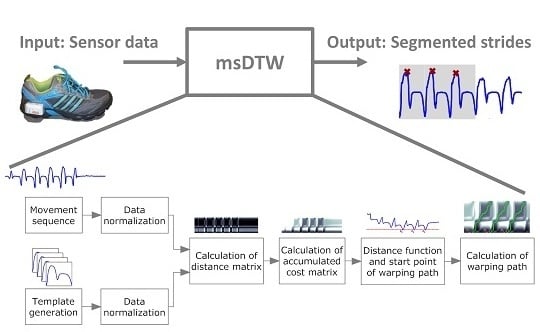
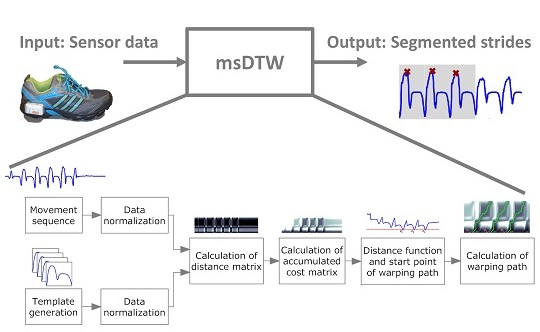
2.4. Multi-Dimensional Subsequence Dynamic Time Warping for Stride Segmentation
2.4.1. Principles of Multi-Dimensional Subsequence Dynamic Time Warping

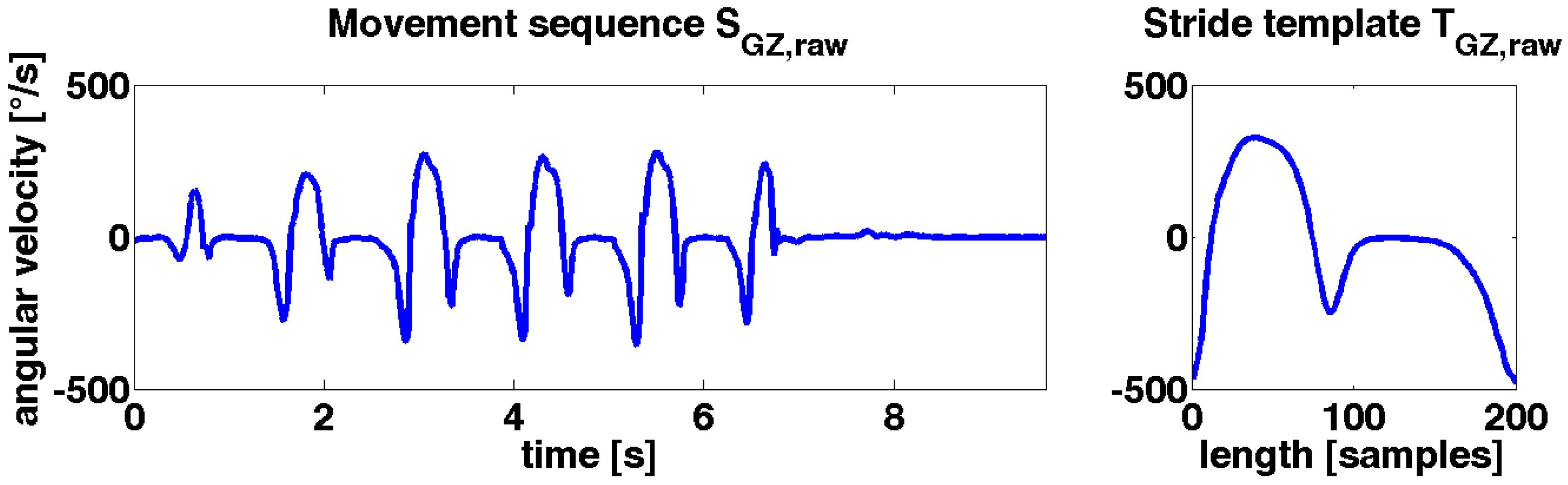
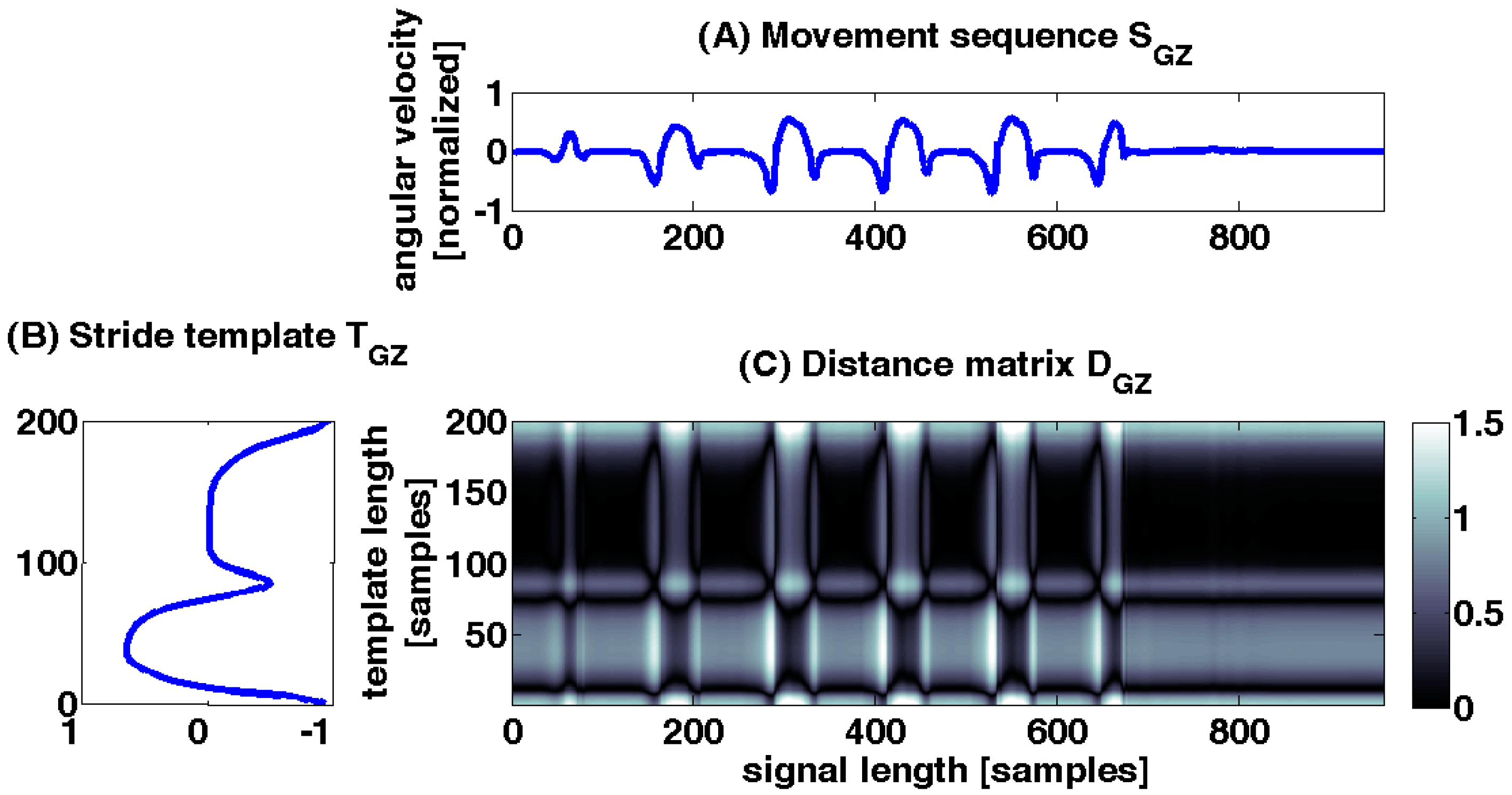
2.4.2. Continuous Movement Sequence

2.4.3. Template Generation

2.4.4. Data Normalization
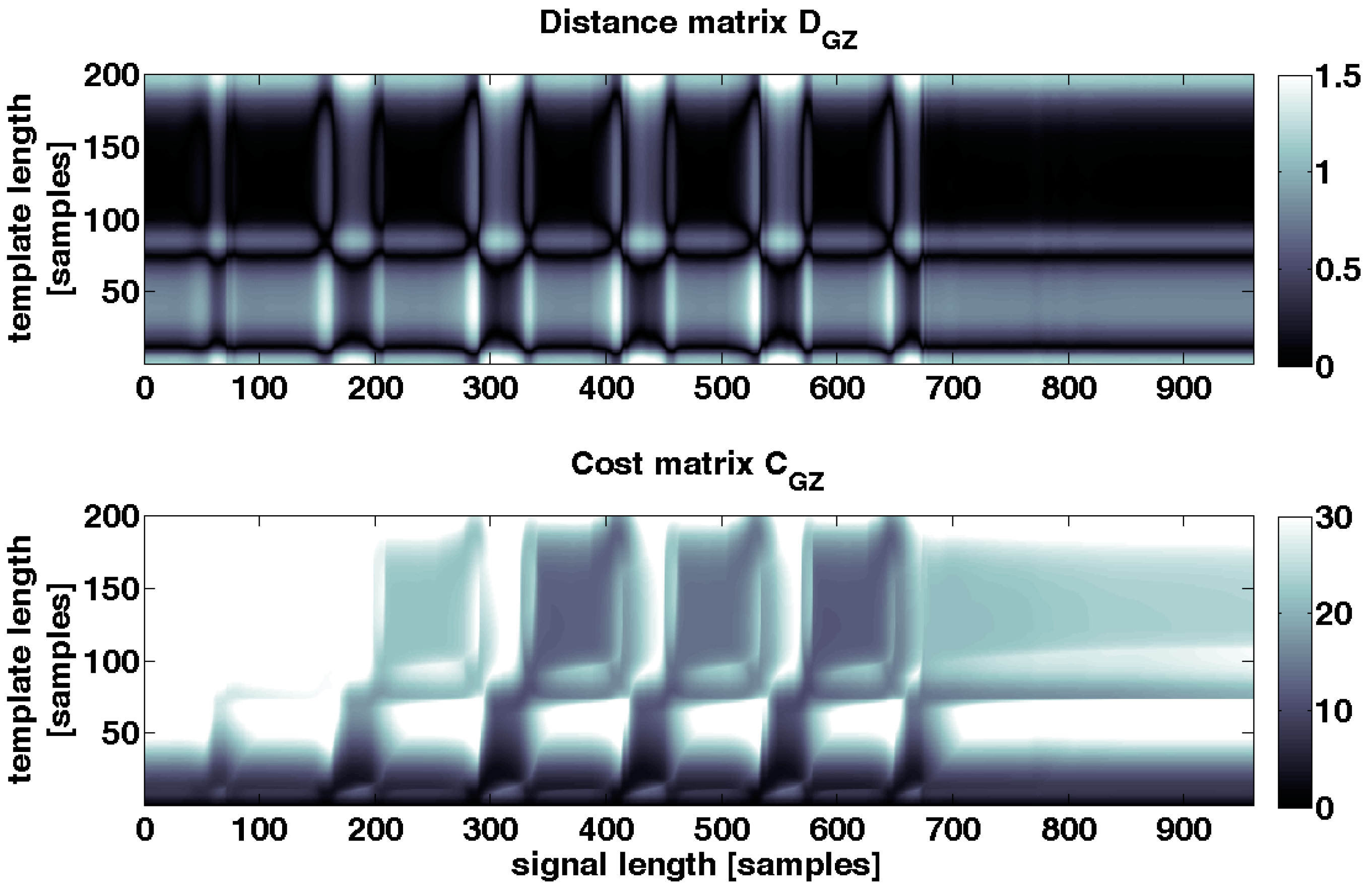
2.4.5. Calculation of Distance Matrix for Combined Sensor Data

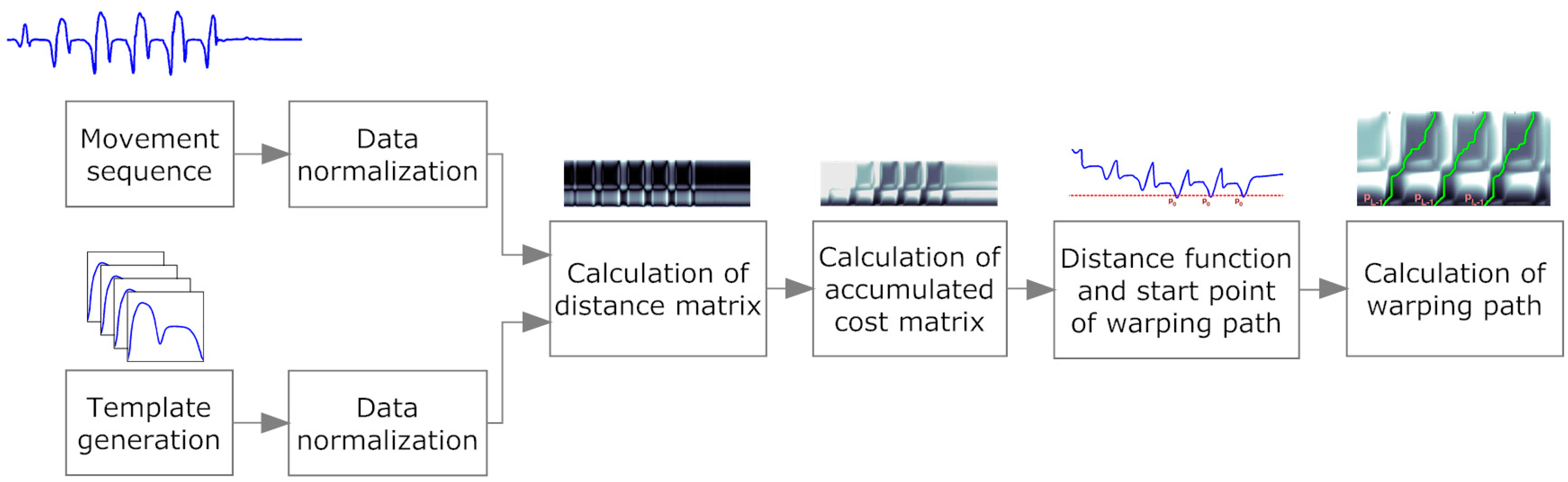
2.4.6. Accumulated Cost Matrix and Warping Path
Calculation of Accumulated Cost Matrix

Distance Function and Starting Point of Warping Path

Calculation of the Warping Path
- Start of the warping path p is in top row of the cost matrix C:
- End of the warping path p is in bottom row of the cost matrix C:
- Next condition ensures that the warping path search is monotonically decreasing: Warping path p has to be a monotonic function where only neighboring elements are added. If new elements were added to p, at least one index must decrease. The maximum decrease of one index for a following element of the warping path is one:
2.4.7. Constraints
2.5. Peak Detection for Performance Comparison
- The angular velocity must be greater than 150 °/s. Salarian et al. [3] used peaks larger than 50 °/s with shank mounted gyroscopes. In our study, the gyroscope threshold was increased since we used shoe-mounted gyroscopes, which produces higher angular velocities.
- The time distance to previous and following peaks must be greater than 250 ms. If multiple peaks within this region are detected, the highest amplitude is selected and the others are discarded [3].
2.6. Error Measurement
2.6.1. Precision
2.6.2. Recall
2.6.3. F-Measure
3. Experiments and Results
3.1. Separate Performance Evaluation of Accelerometer and Gyroscope
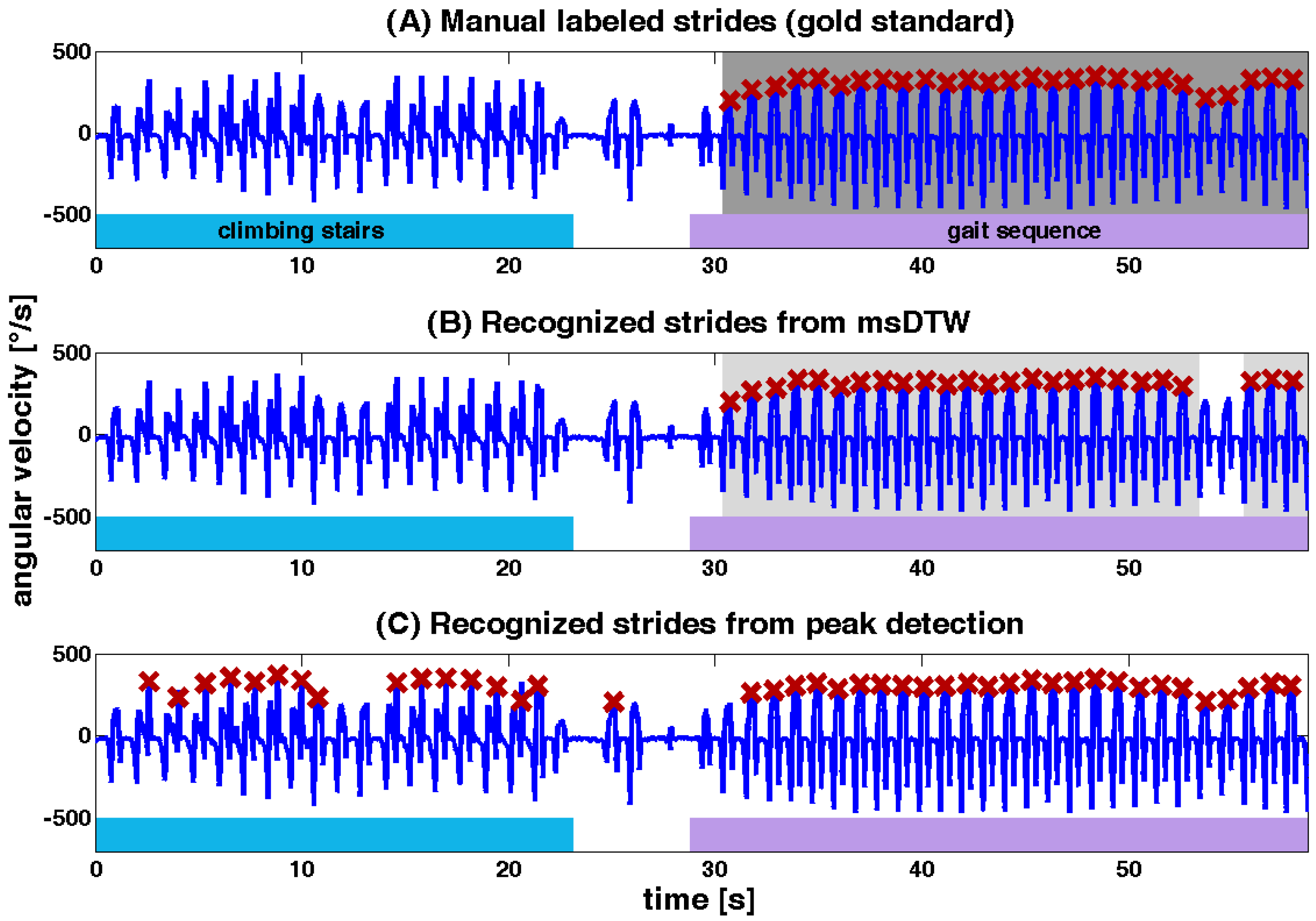
3.2. Stride Segmentation with msDTW and Combined Sensor Types
| X | Y | Z | XY | XZ | YZ | XYZ | |
|---|---|---|---|---|---|---|---|
| Accelerometer Data | |||||||
| Controls | 67% | 53% | 56% | 80% | 75% | 79% | 85% |
| PD Patients | 73% | 59% | 32% | 86% | 77% | 68% | 93% |
| Geriatric Patients | 47% | 11% | 44% | 56% | 38% | 38% | 51% |
| Gyroscope Data | |||||||
| Controls | 80% | 5% | 95% | 73% | 97% | 97% | 96% |
| PD Patients | 67% | 5% | 93% | 39% | 97% | 98% | 97% |
| Geriatric Patients | 67% | 4% | 96% | 48% | 95% | 96% | 96% |
| 40 M Walk | Free Walk | |||||||
|---|---|---|---|---|---|---|---|---|
| Threshold | Precision | Recall | F-Measure | Threshold | Precision | Recall | F-Measure | |
| Accelerometer Data, Combined AXAYAZ | ||||||||
| Controls | 34.5 | 88% | 90% | 85% | 33.3 | 90% | 92% | 90% |
| PD Patients | 30.0 | 94% | 94% | 93% | 34.5 | 82% | 84% | 81% |
| Geriatric Patients | 35.0 | 60% | 49% | 51% | 40.0 | 64% | 62% | 62% |
| Gyroscope Data, Combined GYGZ | ||||||||
| Controls | 34.8 | 96% | 98% | 97% | 35.0 | 96% | 97% | 96% |
| PD Patients | 30.0 | 98% | 98% | 98% | 39.5 | 94% | 97% | 96% |
| Geriatric Patients | 54.8 | 94% | 98% | 96% | 50.0 | 94% | 96% | 95% |
| Combination of Accelerometer and Gyroscope Data AXAYAZGYGZ | ||||||||
| Controls | 70.0 | 97% | 98% | 98% | 76.7 | 96% | 97% | 96% |
| PD Patients | 70.0 | 98% | 97% | 97% | 80.0 | 97% | 97% | 97% |
| Geriatric Patients | 100.0 | 95% | 93% | 94% | 104.0 | 82% | 85% | 83% |
3.3. Stride Segmentation Using Peak Detection

| 40 M Walk | Free Walk | |||||
|---|---|---|---|---|---|---|
| Precision | Recall | F-Measure | Precision | Recall | F-Measure | |
| Controls | 77% | 99% | 86% | 68% | 99% | 81% |
| PD patients | 76% | 99% | 86% | 71% | 100% | 83% |
| Geriatric patients | 84% | 97% | 90% | 85% | 95% | 90% |
4. Discussion
5. Conclusions and Future Work
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Klucken, J.; Barth, J.; Kugler, P.; Schlachetzki, J.; Henze, T.; Marxreiter, F.; Kohl, Z.; Steidl, R.; Hornegger, J.; Eskofier, B.; et al. Unbiased and mobile gait analysis detects motor impairment in parkinson’s disease. PLoS One 2013, 8, e56956. [Google Scholar] [CrossRef] [PubMed]
- Mariani, B.; Hoskovec, C.; Rochat, S.; Büla, C.; Penders, J.; Aminian, K. 3D gait assessment in young and elderly subjects using foot-worn inertial sensors. J. Biomech. 2010, 43, 2999–3006. [Google Scholar] [CrossRef] [PubMed]
- Salarian, A.; Russmann, H.; Vingerhoets, F.J.G.; Dehollain, C.; Blanc, Y.; Burkhard, P.R.; Aminian, K. Gait Assessment in Parkinson’s Disease: Toward an Ambulatory System for Long-Term Monitoring. IEEE Trans. Biomed. Eng. 2004, 51, 1434–1443. [Google Scholar] [CrossRef] [PubMed]
- Selles, R.W.; Formanoy, M.A.G.; Bussmann, J.B.J.; Janssens, P.J.; Stam, H.J. Automated estimation of initial and terminal contact timing using accelerometers; development and validation in transtibial amputees and controls. IEEE Trans. Neural Syst. Rehabil. Eng. 2005, 13, 81–88. [Google Scholar] [CrossRef] [PubMed]
- Derawi, M.O.; Bours, P.; Holien, K. Improved cycle detection for accelerometer based gait authentication. In Proceedings of the Sixth International Conference on Intelligent Information Hiding and Multimedia Signal Processing, Darmstadt, Germany, 15–17 October 2010; pp. 312–317.
- Libby, R. A simple method for reliable footstep detection on embedded sensor platforms. Sensors (Peterborough, NH) 2008, 1–16. [Google Scholar]
- Casamassima, F.; Ferrari, A.; Milosevic, B.; Ginis, P.; Farella, E.; Rocchi, L. A wearable system for gait training in subjects with parkinson’s disease. Sensors 2014, 14, 6229–6246. [Google Scholar] [CrossRef] [PubMed]
- Trung, N.T.N.; Makihara, Y.; Nagahara, H.; Mukaigawa, Y.; Yagi, Y. Inertial-sensor-based walking action recognition using robust step detection and inter-class relationships. In Proceedings of the 2012 21st International Conference on Pattern Recognition (ICPR), Tsukuba, Japan, 11–15 November 2012; pp. 3811–3814.
- Rebula, J.R.; Ojeda, L.V.; Adamczyk, P.G.; Kuo, A.D. Measurement of foot placement and its variability with inertial sensors. Gait Posture 2013, 38, 974–980. [Google Scholar] [CrossRef] [PubMed]
- Hundza, S.; Hook, W.; Harris, C.; Mahajan, S.; Leslie, P.; Spani, C.; Spalteholz, L.; Birch, B.; Commandeur, D.; Livingston, N. Accurate and reliable gait cycle detection in parkinson’s disease. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 22, 127–137. [Google Scholar] [CrossRef]
- Aminian, K.; Najafi, B.; Büla, C.; Leyvraz, P.F.; Robert, P. Spatio-temporal parameters of gait measured by an ambulatory system using miniature gyroscopes. J. Biomech. 2002, 35, 689–699. [Google Scholar] [CrossRef] [PubMed]
- Gouwanda, D.; Senanayake, S.M.N.A. Application of hybrid multi-resolution wavelet decomposition method in detecting human walking gait events. In Proceedings of the 2009 International Conference of Soft Computing and Pattern Recognition, Malacca, Malaysia, 4–7 December 2009; pp. 580–585.
- Khandelwal, S.; Wickström, N. Identification of gait events using expert knowledge and continuous wavelet transform analysis. In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing, Angers, France, 3–6 March 2014; pp. 197–204.
- Han, J.; Jeon, H.S.; Jeon, B.S.; Park, K.S. Gait detection from three dimensional acceleration signals of ankles for the patients with parkinson’s disease. In Proceedings of the IEEE The International Special Topic Conference on Information Technology in Biomedicine, Ioannina, Epirus, Greece, 26–28 October 2006.
- Sabatini, A.M.; Martelloni, C.; Scapellato, S.; Cavallo, F. Assessment of walking features from foot inertial sensing. IEEE Trans. Biomed. Eng. 2005, 52, 486–494. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mannini, A.; Sabatini, A.M. A hidden markov model-based technique for gait segmentation using a foot-mounted gyroscope. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 30 August–3 September 2011; IEEE: Boston, MA, USA, 2011; pp. 4369–4373. [Google Scholar]
- Mannini, A.; Sabatini, A.M. Gait phase detection and discrimination between walking-jogging activities using hidden markov models applied to foot motion data from a gyroscope. Gait Posture 2012, 36, 657–661. [Google Scholar] [CrossRef] [PubMed]
- Ying, H.; Silex, C.; Schnitzer, A.; Leonhardt, S.; Schiek, M. Automatic step detection in the accelerometer signal. In Proceedings of the 4th International Workshop on Wearable and Implantable Body Sensor Networks (BSN 2007), Aachen, Germany, 26–28 March 2007; pp. 80–85.
- Brauner, T.; Oriwol, D.; Sterzing, T.; Milani, T.L. A single gyrometer inside an instrumented running shoe allows mobile determination of gait cycle and pronation velocity during outdoor running. Footwear Sci. 2009, 1, 25–26. [Google Scholar] [CrossRef]
- Myers, C.S.; Rabiner, L.F. A comparative study of several dynamic time-warping algorithms for connected-word. Bell Syst. Tech. J. 1981, 60, 1389–1409. [Google Scholar] [CrossRef]
- Boulgouris, N.V.; Plataniotis, K.N.; Hatzinakos, D. Gait recognition using dynamic time warping. In Proceedings of the IEEE 6th Workshop on Multimedia Signal Processing, Siena, Italy, 29 September–1 October 2004; pp. 263–266.
- Müller, M. Information Retrieval for Music and Motion; Springer: Berlin/Heidelberg, Germany, 2007; pp. 69–84. [Google Scholar]
- Barth, J.; Klucken, J.; Kugler, P.; Kammerer, T.; Steidl, R.; Winkler, J.; Hornegger, J.; Eskofier, B. Biometric and mobile gait analysis for early diagnosis and therapy monitoring in parkinson’s disease. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 868–871.
- Sabatini, A.M. Quaternion-based strap-down integration method for applications of inertial sensing to gait analysis. Med. Biol. Eng. Comput. 2005, 43, 94–101. [Google Scholar] [CrossRef] [PubMed]
- Brégou Bourgeois, A.; Mariani, B.; Aminian, K.; Zambelli, P.Y.; Newman, C.J. Spatio-temporal gait analysis in children with cerebral palsy using, foot-worn inertial sensors. Gait Posture 2014, 39, 436–442. [Google Scholar] [CrossRef] [PubMed]
- Grabiner, P.C.; Biswas, S.T.; Grabiner, M.D. Age-related changes in spatial and temporal gait variables. Arch. Phys. Med. Rehabil. 2001, 82, 31–35. [Google Scholar] [CrossRef] [PubMed]
- Barth, J.; Oberndorfer, C.; Kugler, P.; Schuldhaus, D.; Winkler, J.; Klucken, J.; Eskofier, B. Subsequence dynamic time warping as a method for robust step segmentation using gyroscope signals of daily life activities. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Osaka, Japan, 3–7 July 2013; pp. 6744–6747.
- Rampp, A.; Barth, J.; Schülein, S.; Gaßmann, K.G.; Klucken, J.; Eskofier, B.M. Inertial sensor based stride parameter calculation from gait sequences in geriatric patients. IEEE Trans. Biomed. Eng. 2014, 1–9. [Google Scholar] [CrossRef]
- Goetz, C.G.; Poewe, W.; Rascol, O.; Sampaio, C.; Stebbins, G.T.; Counsell, C.; Giladi, N.; Holloway, R.G.; Moore, C.G.; Wenning, G.K.; et al. Movement disorder society task force report on the hoehn and yahr staging scale: Status and recommendations. Mov. Disord. 2004, 19, 1020–1028. [Google Scholar] [CrossRef] [PubMed]
- Goetz, C.G.; Fahn, S.; Martinez-Martin, P.; Poewe, W.; Sampaio, C.; Stebbins, G.T.; Stern, M.B.; Tilley, B.C.; Dodel, R.; Dubois, B.; et al. Movement disorder society-sponsored revision of the unified parkinson’s disease rating scale (mds-updrs): Process, format, and clinimetric testing plan. Mov. Disord. 2007, 22, 41–47. [Google Scholar] [CrossRef] [PubMed]
- Burns, A.; Greene, B.R.; McGrath, M.J.; O’Shea, T.J.; Kuris, B.; Ayer, S.M.; Stroiescu, F.; Cionca, V. Shimmer™—A wireless sensor platform for noninvasive biomedical research. IEEE Sens. J. 2010, 10, 1527–1534. [Google Scholar] [CrossRef]
- Peruzzi, A.; Della Croce, U.; Cereatti, A. Estimation of stride length in level walking using an inertial measurement unit attached to the foot: A validation of the zero velocity assumption during stance. J. Biomech. 2011, 44, 1991–1994. [Google Scholar] [CrossRef] [PubMed]
- Ten Holt, G.A.; Reinders, M.J.T.; Hendriks, E.A. Multi-dimensional dynamic time warping for gesture recognition. In Proceedings of the Thirteenth Annual Conference of the Advanced School for Computing and Imaging, Heijen, The Netherlands, 13–15 June 2007.
- Djurić-Jovicić, M.D.; Jovicić, N.S.; Radovanović, S.M.; Stanković, I.D.; Popović, M.B.; Kostić, V.S. Automatic identification and classification of freezing of gait episodes in parkinson’s disease patients. IEEE Trans. Neural Syst. Rehabil. Eng. 2014, 22, 685–694. [Google Scholar] [CrossRef] [PubMed]
- Powers, D.M. Evaluation: From precision, recall and f-measure to roc, informedness, markedness and correlation. J. Mach. Learn. Technol. 2011, 2, 37–63. [Google Scholar]
- Pfau, T.; Ferrari, M.; Parsons, K.; Wilson, A. A hidden markov model-based stride segmentation technique applied to equine inertial sensor trunk movement data. J. Biomech. 2008, 41, 216–220. [Google Scholar] [CrossRef] [PubMed]
- Kang, H.G.; Dingwell, J.B. Separating the effects of age and walking speed on gait variability. Gait Posture 2008, 27, 572–577. [Google Scholar] [CrossRef] [PubMed]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barth, J.; Oberndorfer, C.; Pasluosta, C.; Schülein, S.; Gassner, H.; Reinfelder, S.; Kugler, P.; Schuldhaus, D.; Winkler, J.; Klucken, J.; et al. Stride Segmentation during Free Walk Movements Using Multi-Dimensional Subsequence Dynamic Time Warping on Inertial Sensor Data. Sensors 2015, 15, 6419-6440. https://doi.org/10.3390/s150306419
Barth J, Oberndorfer C, Pasluosta C, Schülein S, Gassner H, Reinfelder S, Kugler P, Schuldhaus D, Winkler J, Klucken J, et al. Stride Segmentation during Free Walk Movements Using Multi-Dimensional Subsequence Dynamic Time Warping on Inertial Sensor Data. Sensors. 2015; 15(3):6419-6440. https://doi.org/10.3390/s150306419
Chicago/Turabian StyleBarth, Jens, Cäcilia Oberndorfer, Cristian Pasluosta, Samuel Schülein, Heiko Gassner, Samuel Reinfelder, Patrick Kugler, Dominik Schuldhaus, Jürgen Winkler, Jochen Klucken, and et al. 2015. "Stride Segmentation during Free Walk Movements Using Multi-Dimensional Subsequence Dynamic Time Warping on Inertial Sensor Data" Sensors 15, no. 3: 6419-6440. https://doi.org/10.3390/s150306419
APA StyleBarth, J., Oberndorfer, C., Pasluosta, C., Schülein, S., Gassner, H., Reinfelder, S., Kugler, P., Schuldhaus, D., Winkler, J., Klucken, J., & Eskofier, B. M. (2015). Stride Segmentation during Free Walk Movements Using Multi-Dimensional Subsequence Dynamic Time Warping on Inertial Sensor Data. Sensors, 15(3), 6419-6440. https://doi.org/10.3390/s150306419