1. Introduction
Multi-digital camera systems (MDCSs) are constantly being improved to meet the increasing requirement of high-resolution spatial data. The MDCSs constitute a class of optical sensors and is composed of a variety of devices, including multi-cameras, global navigation satellite system (GNSS), inertial measurement unit (IMU) and others (e.g., MADC II [
1], SWDC [
2], DMC [
3] and UltraCam [
4]). Part of the current interest in developing MDCSs stems from the limitations in the size of current Charge-coupled Device (CCD) and Complementary Metal-Oxide-Semiconductor (CMOS) area arrays for digital cameras—hence the use of multiple cameras and other auxiliary devices by a number of system suppliers to increase the ground area that can be covered from a single exposure station. Besides the increase in the coverage area of rectangular or square format digital frame photos, there is a long-standing requirement on the part of earth observation, survey, military and many fields to obtain the widest possible cross-track angular coverage using MDCSs. Apart from the multi-photo and multi-camera aspects of photography, the MDCSs are also of increasing importance for both surveillance and for visualization purposes—with the acquisition of multiple digital images from both manned and unmanned platforms. The advantages of MDCSs can facilitate the rapid acquisition of high-resolution spatial data. As such, MDCSs is widely used in photogrammetry engineering and research (e.g., [
5,
6,
7,
8,
9,
10]).
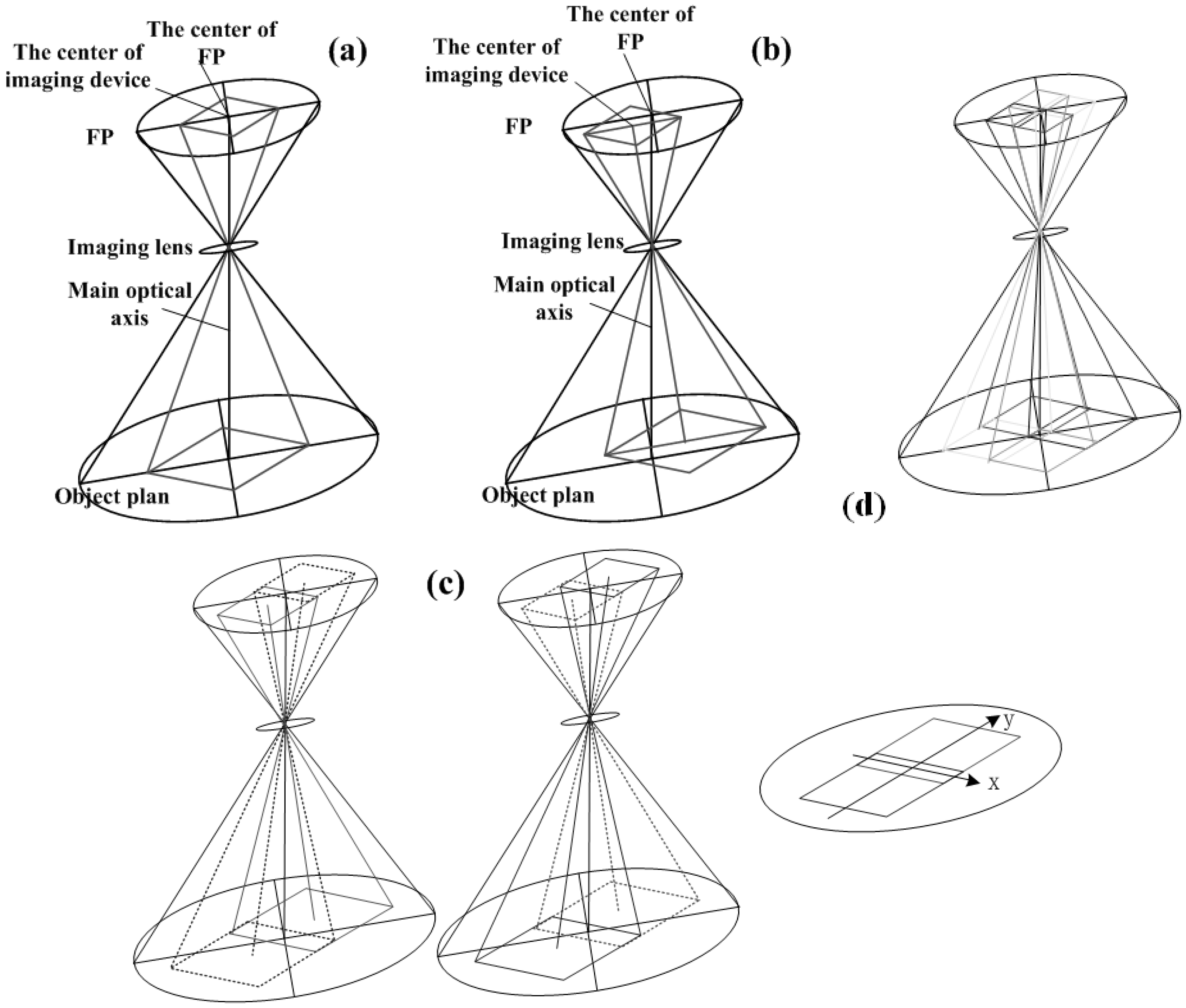
Fifteen years ago the first commercial MDCS (DMC, Intergraph/ZI-Imaging, Aalen, Germany) was released for sale. Since then the development of MDCSs have become an open issue. The UltraCam (Vexcel Corp., Boulder, CO, USA) and DiMAC (DiMAC Systems) have to be mentioned as latecomers in the field of MDCS providers. They have been commercially available for almost ten years. In the beginning of 2005, several tests with multiple camera modules as well as different lenses were performed and corresponding reports were published. The basic concept of MDCS was gradually built. In China, the study of MDCSs, SWDC and MADC specifically, were begun in 2008 and 2007, respectively. Although many types of MDCS exist in the field of photogrammetry, the composition of existing MDCSs can be divided into two categories: MDCS based on tilt photography and MDCS based on delay exposure. In tilt photography technology-based MDCS, some or all of its cameras are arranged in a tilted position, as shown in
Figure 1a (SWDC),
Figure 1b (MADC II) and
Figure 1c (DMC). The accuracy of these MDCSs, especially those whose cameras are in a tilted position, suffers from the problem of projection differences (PDs). High-accuracy digital elevation model (DEM) data can be used to address this problem (
i.e., to correct PDs), but the quality of the additional DEM data still determines the accuracy of the correction. Another problem that commonly occurs in such cameras is the difficulty of achieving the unified spatial resolution of an image captured from each camera. More details on PD and its impact on the geometric accuracy of MDCSs can be found in [
11,
12]; a processing method that addresses some of the common problems in DMC and MADCII is introduced in [
13,
14,
15,
16]. In delay exposure technology-based MDCS, as represented by UltraCam [
17] (
Figure 1d), the exposure of each camera is short-time asynchronous. The accuracy of these MDCSs depends not only on the punctuality of the shutter’s control system but also on the stability of the platform in a given period of time for a group of images. Long-periodic attitude and position deviations can be corrected by high-accuracy GNSS and IMU devices, but short-periodic deviations caused by the instability of the platform (e.g., platform jitter) cause great difficulties in data processing. Some processing methods that address some of these problems (e.g., platform instability) in UltraCam can be found in [
18,
19].
Figure 1.
Exiting MDCSs: (a) SWDC-4; (b) MADC II; (c) DMC; and (d) UltraCam.
Figure 1.
Exiting MDCSs: (a) SWDC-4; (b) MADC II; (c) DMC; and (d) UltraCam.
Kass [
20] conducted an experiment to test the geometric accuracy of DMC, UltraCam and ADS40 under the same conditions. The experiment showed that the accuracy ranking of the cameras from high to low is as follows: ADS40, DMC and UltraCam. To further improve the geometric accuracy and simplify the image process of MDCS, the present study proposes a third category of MDCS: the tilt-shift photography technology-based MDCS. The advantages of the new MDCS are the following: it eliminates the need to arrange the cameras in a tilted position, and it makes all cameras synchronous in capturing images (synchronous exposure). The image process of the new MDCS also eliminates the need to correct PDs and unify the spatial resolution of the images captured from each camera; the stability of the platform cannot be considered because of synchronous exposure.
However, geometric calibrations are necessary in both the traditional and our proposed MDCS. Moreover, the distortion of the edges of images captured by cameras with tilt-shift photography (i.e., tilt-shift camera (TSC)) is larger than that of traditional cameras. Therefore, further research on the appropriate calibration technique for TSC is crucial. The contributions of the present work are the following: (1) a novel MDCS; (2) a geometric calibration for TSC camera and experiments; and (3) image processing and accuracy assessment using flight experiments for the new MDCS.
The rest of this paper is organized as follows:
Section 2 introduces the principle of tilt-shift photography and the novel MDCS and prototype system developed in this study.
Section 3 and
Section 4 discuss the indoor control field-based calibration methods for the TSC and experiments, respectively.
Section 5 discusses the flight experiments conducted on the new MDCS and MADCII.
Section 6 ends with the conclusions of the study.
4. Calibration Experiments for TSC and Analysis of the Results
The TSCs of the prototype system (Nikon D90 and tilt-shift lens) have two kinds of shift-directions: horizontal (left-right) and vertical (up-down) (
Figure 7a). The objective of the calibration experiment is to calibrate the DDM and IOEs of TSC under different tilt-shift conditions and to validate the correctness and feasibility of our calibration methods. To facilitate the follow-up description, this study defines the coordinates (
XOY−
F) of TSC, as shown in
Figure 7b. In this figure, the horizontal shift-direction is the
X-axis and the right-direction is positive; the vertical shift-direction is the
-axis and up-direction is positive; the
F-axis is the direction of the main optical axis; the coordinate’s origin
O is the intersection of the
F-axis and plane-
XOY in the case of zero tilt-shift condition. The coordinates (
xoy−
f) constitute the image plane coordinate system.
Figure 7.
(a) TSC of the prototype system and (b) the defined coordinates.
Figure 7.
(a) TSC of the prototype system and (b) the defined coordinates.
The three categories of the calibration experiment for the TSC are as follows.
- (1)
Tilt-shift and the nine groups of experiments: one group of experiments is conducted under the zero tilt-shift condition, four groups under the condition with different tilt-shift values along the Y direction, and four groups along the X direction.
- (2)
Restarting the cameras, including two groups of experiment: one group of experiments is conducted under the zero tilt-shift condition, and another group under the largest tilt-shift magnitude along the Y direction.
- (3)
Lens reshipment, including two groups of experiment: one group of experiments is conducted under the zero tilt-shift condition, and another under the largest tilt-shift magnitude along the Y direction.
With the help of the calibration method discussed in
Section 3, the DDM of the TSC is calculated, after which the DLT is used to calculate the IOEs of the TSC. The checkpoint method is used to validate the accuracy of the calibration. The number of checkpoints and RMSE are listed in
Table 4,
Table 5 and
Table 6.
4.1. Results of the Tilt-Shift Experiment
The results in
Table 4 (the IOEs of TSC in the tilt-shift experiment) show that the focal length of TSC is unstable under the condition of different tilt-shift value and that the largest change in the focal length is 0.106 mm (with a relative error of 1/235). We suggest building a lookup table of focal length in the indoor control field to ascertain the value of the focal length under the condition of different tilt-shift value.
Table 4.
IOEs of the camera in the tilt-shift experiment (mm).
Table 4.
IOEs of the camera in the tilt-shift experiment (mm).
| Tilt-Shift | ∆mX | ∆mY | x0 | y0 | f | ∆mx * | ∆my * | ∆f * | No. of Checkpoints | RMSE (Pixels) |
|---|
| Zero | 0 | 0 | 11.99979 | 8.86909 | 25.0698 | 0 | 0 | 0 | 43 | 0.273 |
| Along the Y direction | 0 | 5.2 | 12.02504 | 14.06404 | 25.05845 | 0.02525 | 5.194953 | –0.011352 | 36 | 0.364 |
| 0 | 7.2 | 12.03491 | 16.06058 | 25.05385 | 0.03512 | 7.191487 | –0.015948 | 42 | 0.168 |
| 0 | –5.2 | 11.95968 | 3.649679 | 25.04293 | –0.04011 | –5.21941 | –0.026866 | 46 | 0.384 |
| 0 | –10.8 | 11.93393 | –1.9371 | 24.97507 | –0.06586 | –10.8062 | –0.094724 | 51 | 0.453 |
| Along the X direction | 4.8 | 0 | 16.79214 | 8.82381 | 25.11648 | 4.79235 | –0.02511 | 0.046686 | 23 | 0.268 |
| 10.8 | 0 | 22.80507 | 8.84398 | 25.13975 | 10.80528 | –0.04528 | 0.069951 | 31 | 0.478 |
| –6 | 0 | 5.994606 | 8.89152 | 25.06754 | –6.00519 | 0.02243 | –0.002258 | 16 | 0.426 |
| –12 | 0 | –0.02098 | 8.90431 | 24.96335 | –12.0208 | 0.03522 | –0.10645 | 34 | 0.359 |
In
Table 4, ∆
mX, ∆
mY represent the theoretical value of the tilt-shift as directly read in the dial of the Lens; (
x0,
y0,
f) represent the calibrated IOEs of TSC; ∆
mx, ∆
my represent the calibrated value of the tilt-shift; ∆
f represents the change of the focal length between the adjacent values of the tilt-shift.
Figure 8.
(a) Existing angle between the Y-axis and y-axis and (b) existing angle between the X-axis and x-axis.
Figure 8.
(a) Existing angle between the Y-axis and y-axis and (b) existing angle between the X-axis and x-axis.
Figure 9.
DDM of TSC: (a) DDM under the zero tilt-shift condition; (b–e) DDM under the tilt-shift along the Y direction; and (f–i) DDM under the tilt-shift along the X direction. Pixel size: 5.5 μm.
Figure 9.
DDM of TSC: (a) DDM under the zero tilt-shift condition; (b–e) DDM under the tilt-shift along the Y direction; and (f–i) DDM under the tilt-shift along the X direction. Pixel size: 5.5 μm.
As further described by the calibrated data in
Table 4,
Figure 8 illustrates that the actual mechanical tilt-shift direction (X-axis, Y-axis) does not coincide with the image plane coordinate system (x-axis, y-axis). This characteristic must be considered in the TSC calibration.
The results of the DDM of the TSC in the tilt-shift experiment are shown in
Figure 9, where the x-axis and y-axis (unit: 10 pixels) represent the ranks and arrays of CCD, respectively, and the z-axis represents the total distortion (unit: 1 pixel). The results show that the magnitude of the distortion away from the tilt-shift direction is larger than that close to the tilt-shift direction. The magnitude of the edge distortion increases with increasing tilt-shift value. Thus, for distortion expression and correction, DDM is better than the distortion coefficients.
4.2. Results of the Camera Restarting Experiment
The results in
Table 5 and
Figure 10 show that, when restarting the camera, the changes in the IOEs under the large tilt-shift value are larger than those under the zero tilt-shift value. However, the magnitude of the deviation is very subtle so that it can be neglected.
Table 5.
IOEs of the camera in the restarting experiment (mm).
Table 5.
IOEs of the camera in the restarting experiment (mm).
| Tilt Shift (mm) | Camera Restart | x0 (mm) | y0 (mm) | f (mm) | No. of Checkpoints | RMSE (Pixel) | Note |
|---|
| 0 | | 11.99979 | 8.86909 | 25.0698 | 46 | 0.583 | 1(pixel) = 0.0055 (mm) |
| Restart | 12.00549 | 8.86479 | 25.0686 | 29 | 0.429 |
| 10.8 | | 11.93394 | −2.0271 | 24.9751 | 37 | 0.366 |
| Restart | 11.94504 | −2.0385 | 24.9893 | 19 | 0.453 |
Figure 10.
DDM of Camera Restart experiment.
Figure 10.
DDM of Camera Restart experiment.
4.3. Results of Lens Reshipment Experiment
As shown in
Table 6 and
Figure 11, the results illustrate that Lens Reshipment brings very great impact on IOEs and Distortion of camera either under the tilt-shift condition or not. The maximum deviation of principal point, focal length, and maximum distortion are about 11, 11, and 4.5 pixels under the tilt-shift condition, respectively. Thus, calibration needs to be redone if tilt-shift lens reship.
Table 6.
Camera’s inner orientation elements in the lens reshipment experiment, unit: mm.
Table 6.
Camera’s inner orientation elements in the lens reshipment experiment, unit: mm.
| Tilt Shift (mm) | Lens Reshipment | x0 (mm) | y0 (mm) | f (mm) | No. of Checkpoints | RMSE (Pixels) |
|---|
| 0 | | 11.99979 | 8.86909 | 25.0698 | 34 | 0.368 |
| reshipment | 12.02049 | 8.82265 | 25.0516 | 43 | 0.345 |
| 10.8 | | 11.93394 | –2.0271 | 24.9751 | 22 | 0.442 |
| reshipment | 11.99504 | –2.0845 | 24.9293 | 17 | 0.328 |
Figure 11.
DDM of the lens reshipment experiment.
Figure 11.
DDM of the lens reshipment experiment.
5. Flight Experiment
To experimentally verify the accuracy of the novel MDCS, some flight experiments were performed by installing the prototype system using two TSCs with extension by short edge in the Yun-5 aircraft. The experimental area covers Guangxi Wuzhou, China, which is located in the eastern longitude 111°51′14″ to 111°40′00″ and northern latitude 22°58′12″ to 24°10′14″. The flight height, course overlap and Ground Sample Distance (GSD) in the experiment are 800 m, 60% and about 0.15 m, respectively.
The prototype system in the experiment received 150 groups of images. The steps of the imaging process may be outlined as follows. First, the DDM is calibrated through the IDAM method, and each TSC is subjected to distortion correction. Second, equivalent IOEs of a virtual camera composed by all TSC are constructed according to the calibrated IOEs of each TSC. Third, the matching points derived from the pixel-level phase correlation algorithm [
37] and the equivalent IOEs are used to generate the stitched image. Fourth, radiometric correction is performed to eliminate the radiometric difference among the images from the different TSCs, using the method proposed in [
38]. The stitched image from a group of images can then be regarded as one image captured from this virtual camera, and the equivalent IOEs constitute the parameters of this camera. Finally, mature photography software (Pixel Grid-ATT) is used for the subsequent processing, which includes block adjustment, DEM generation [
39] and so on. Information on Pixel Grid-ATT is available in the public website [
40].
In the subsequent processing, self-calibration method and GNSS data are used in the block adjustment processing. Given the systematic errors of GNSS, location model changes to Equation (2):
where, [
aX aY aZ]
T is the distance between the photography center and GNSS center; (
t−
t0) [
bX bY bZ]
T is the systematic errors of GNSS. Consequently, linearized error equation based on GNSS observations is built, as shown in Equation (3):
An error equation based on the GNSS observations, as shown in Equation (4), is added to the self-calibration error equations, thereby performing block adjustment processing. Given the same observed condition, each weight of observations is set equal. According to self-calibration based on the GNSS observations, equivalent IOEs of prototype system are re-evaluated in the bundle adjustment starting from the values computed in the previous-phase. Finally, the DEM and other product can be generated.
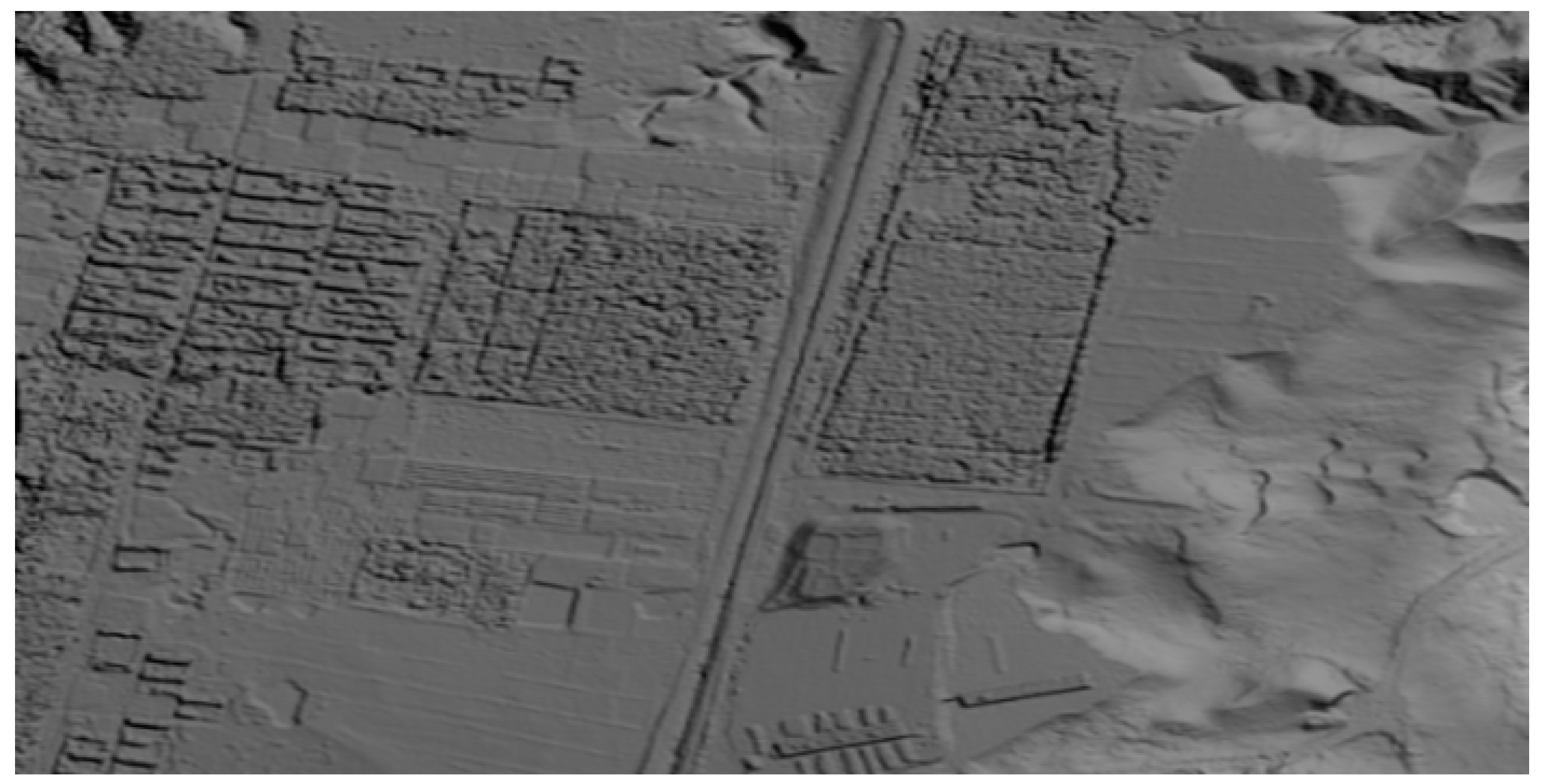
Figure 12 and
Figure 13 show one of the results of the stitched image and the corresponding regional rendering image of the generated DEM.
MADC II (
i.e., an older MDCS) is also installed in the Yun-5 aircraft for comparison. The geometric characteristics of MADCII are listed in
Table 7. To ensure a credible assessment for the geometric comparison between MADCII and the prototype system, MADCII is also subjected to geometric calibration and image processing under the same conditions, such as the same indoor control field and Pixel Grid-ATT software. As
Figure 14 shows, MADCII is set in the optical platform for the calibration of the IOEs and distortion of each camera. The experimental flight height for MADCII is higher (about 1330 m) than that for the prototype system, thereby ensuring that the spatial resolutions of the image captured from MADCII are approximately equal to those of the prototype system.
Figure 12.
Results of the stitching: (a,b) image captured from TSCs and (c) stitched image.
Figure 12.
Results of the stitching: (a,b) image captured from TSCs and (c) stitched image.
Figure 13.
Rendering image of the generated DEM.
Figure 13.
Rendering image of the generated DEM.
Table 7.
Parameters of TSC and prototype system.
Table 7.
Parameters of TSC and prototype system.
| | Array Size | Pixel Size (μm) | Field Angle (°) | Focal Length (mm) | Dip Angle of the Camera in the Tilt Position |
|---|
| Single Camera | 4096 × 4096 | 9 | 26° × 26° | 80 | ±23° |
| MADC II | 12000 × 4000 | 72° × 26° |
Figure 14.
MADCII is set in the optical platform for the calibration of the IOEs and distortion of each camera.
Figure 14.
MADCII is set in the optical platform for the calibration of the IOEs and distortion of each camera.
In the accuracy assessment, we adopt the checkpoint method and prepare 30 checkpoints (CPs) surveyed by the static GNSS (Ashtech ProMark2). The level precision of the GCPs can reaches 6 mm, and the vertical precision can reaches 12 mm by GNSS phase observations of 20 min. The distribution and location of a slice of CPs are shown in
Figure 15. The results of the geometric comparison between MADCII and the prototype system are listed in
Table 8.
Figure 15.
A slice of ground control points.
Figure 15.
A slice of ground control points.
In another experiment, we use the following two sets of distortion parameters to separately perform image processing: those calibrated through our proposed DDM method and the traditional distortion coefficients method acquired from a one-step calibration. In traditional distortion coefficients method, we adopt four coefficients, including radial distortions (k1 and k2) and tangential distortions (p1 and p2), to describe the camera’s distortion. Distortion model based on four coefficients is shown as Equation (5). This experiment is used for the validation of the accuracy and feasibility of the DDM method, and the results are also listed in
Table 8.
Table 8.
Accuracy of the prototype system and MACDII (m).
Table 8.
Accuracy of the prototype system and MACDII (m).
| | Ground Sample Distance | Amount of CPs | Distortion Correction Using DDM | Distortion Correction Using Distortion Coefficients |
|---|
| RMS of CPs (Plane Precision) * | RMS of CPs (Height Precision) + | RMS of CPs (Plane Precision) * | RMS of CPs (Height Precision) + |
|---|
| prototype system | about 0.15 | 30 | 0.28 | 0.32 | 0.83 | 1.21 |
| MACD II | about 0.15 | 30 | 0.54 | 0.63 | 1.06 | 1.76 |
The experimental results demonstrate that the accuracy of the novel MDCS is better than that of MACD II and that the proposed DDM calibration method is appropriate for the distortion correction of the camera with a relatively larger tilt-shift value. The system built in this study is merely a prototype system of the novel MDCS; as such, the system does not use the more accurate and expensive tilt-shift camera. Using higher accuracy TSC in the new MDCS results in further improvement of the accuracy of the photogrammetry senior product.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












