
Basic Characteristics of a Macroscopic Measure for Detecting Abnormal Changes in a Multiagent System


Abstract
:1. Introduction
2. Background and Motivation
3. Method of Detecting Changes in a Behavioral Property of an MAS
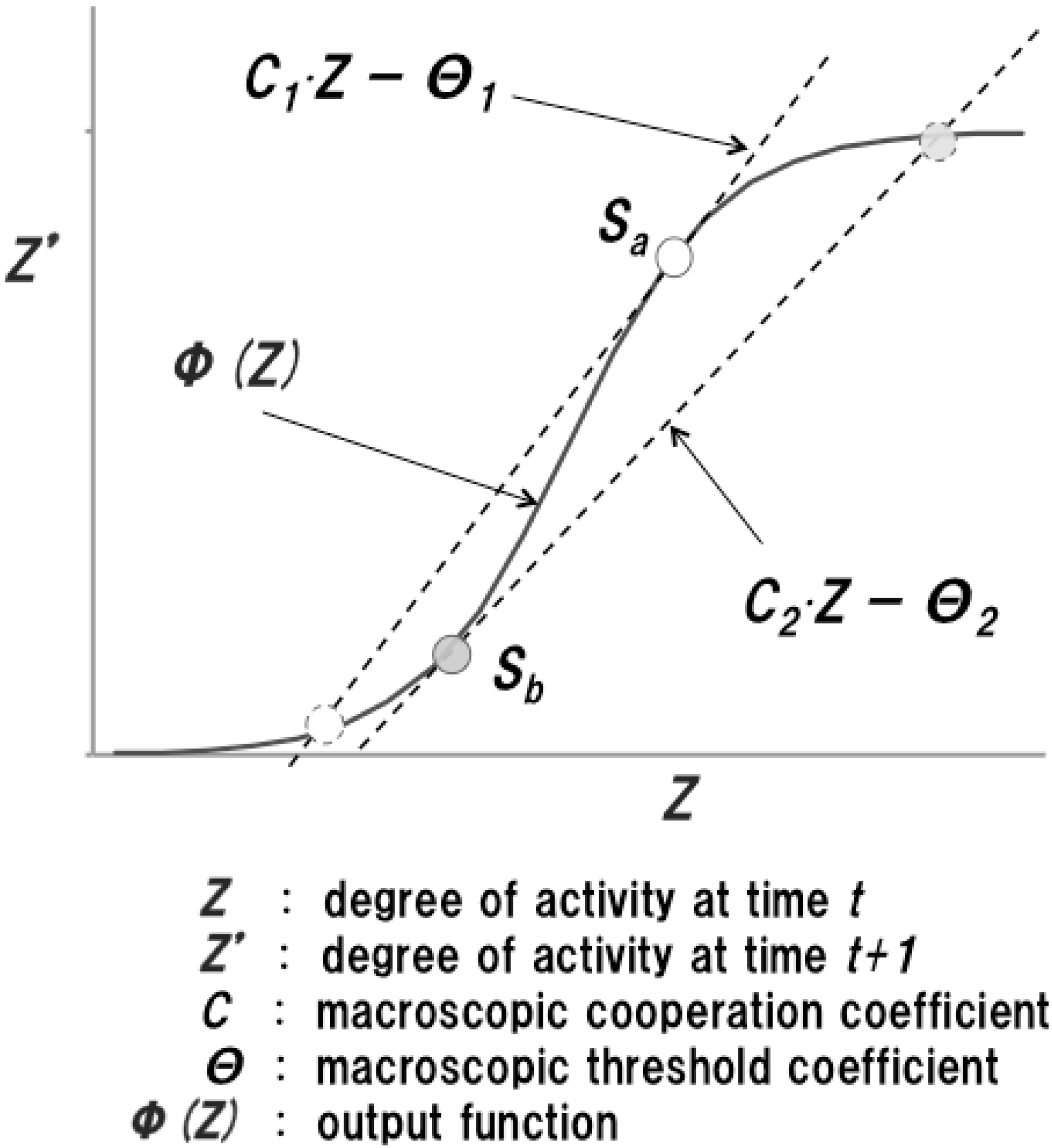
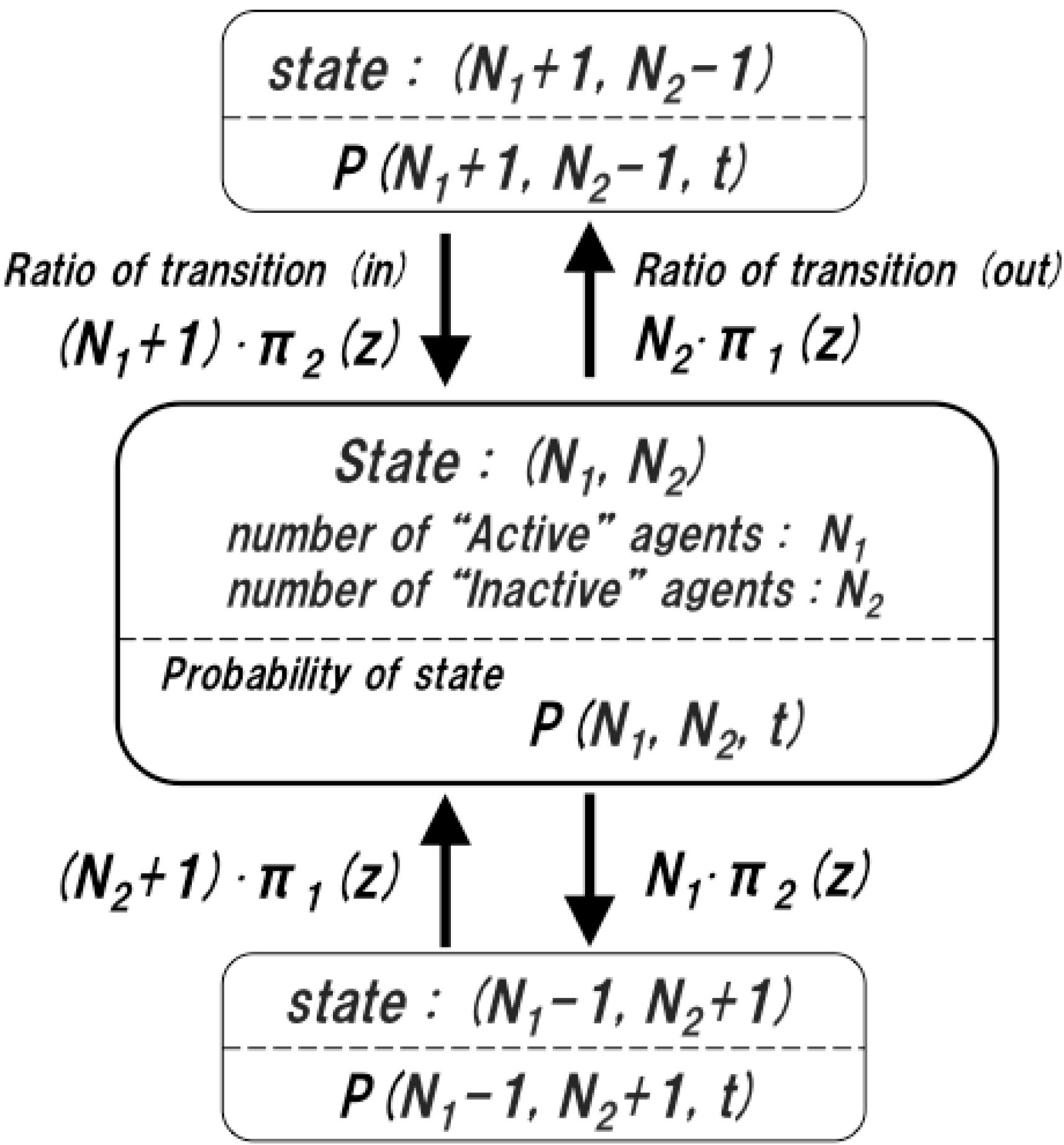
3.1. Definition of the Macroscopic State Transition Equation of an MAS


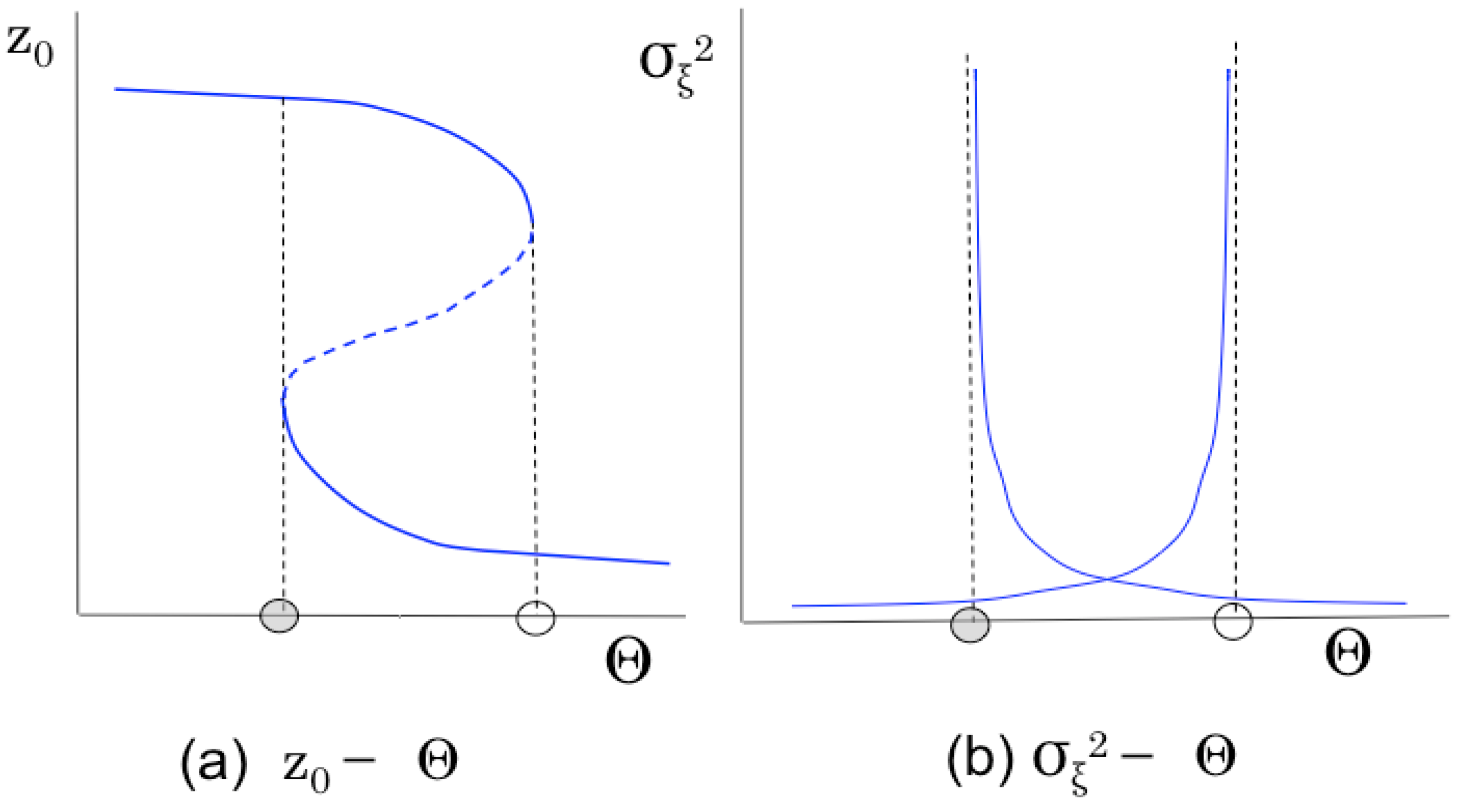
3.2. Analysis of the Macroscopic Behavior of an MAS

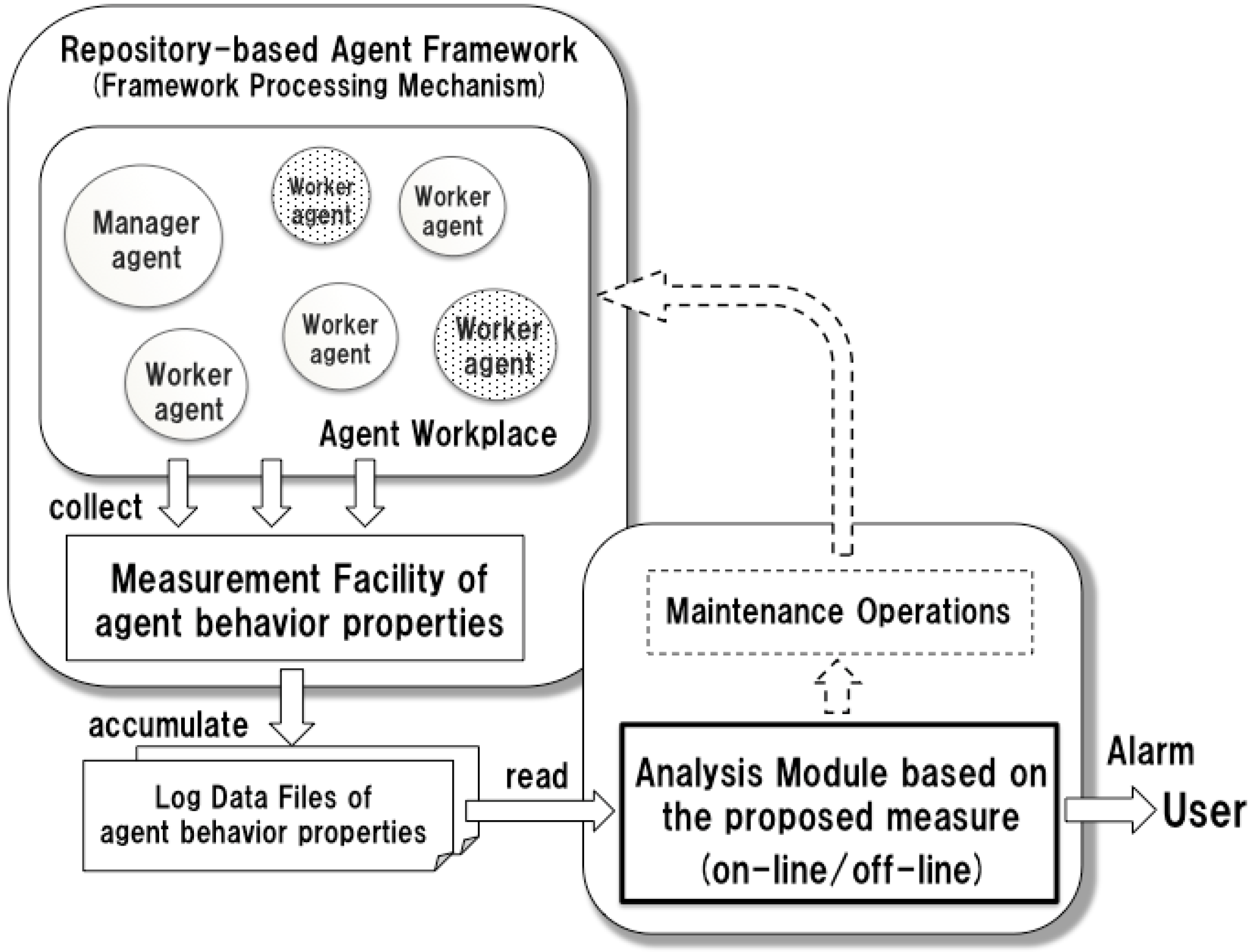
3.3. Macroscopic Measure Used to Observe the Behavioral Property of an MAS

4. Experiments and Evaluation
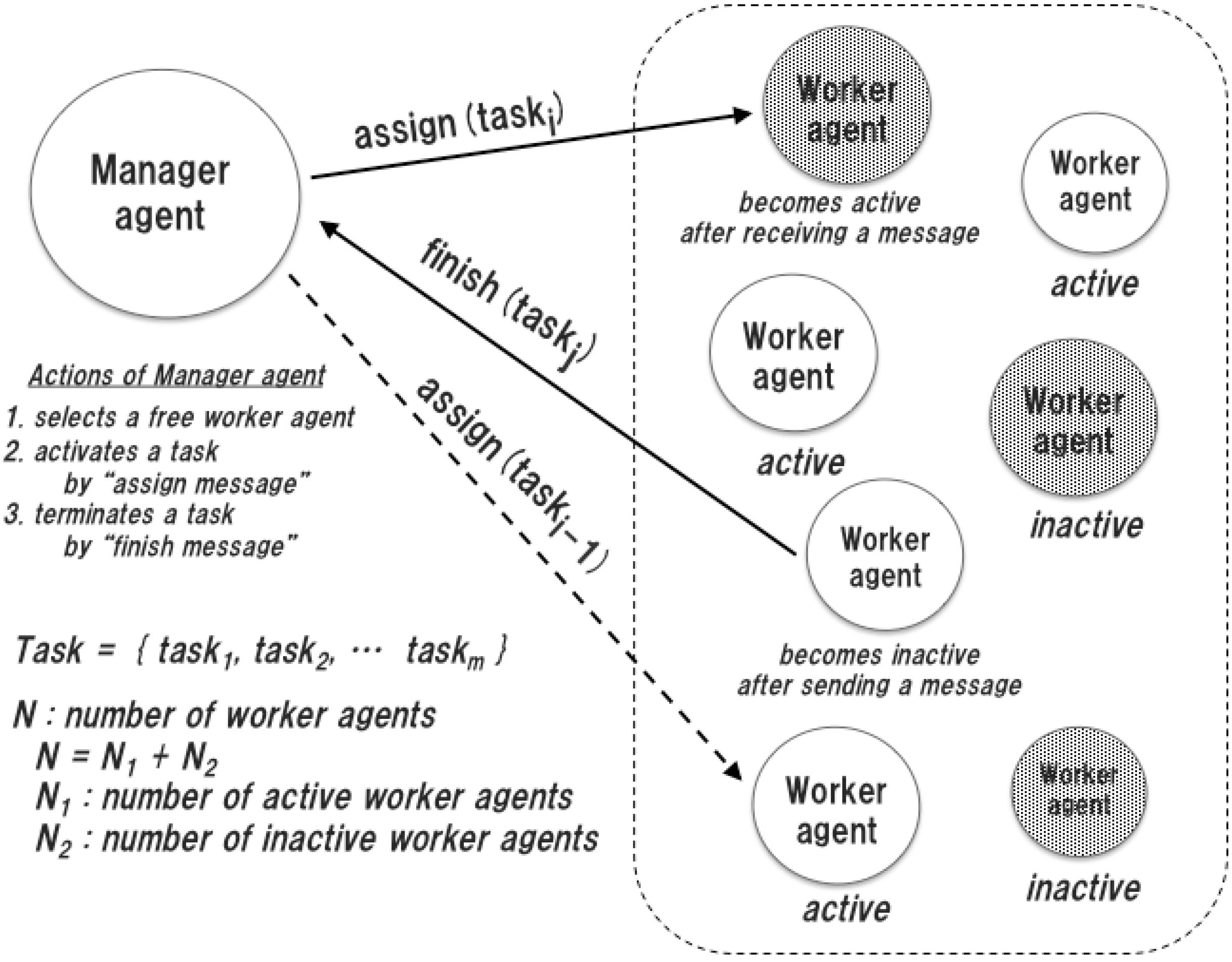
4.1. Test Bed System and the Environment of Experiments


4.2. Implementation of the Measurement Function
4.3. Experiment 1 and Evaluation
4.3.1. Setting of Experiment 1

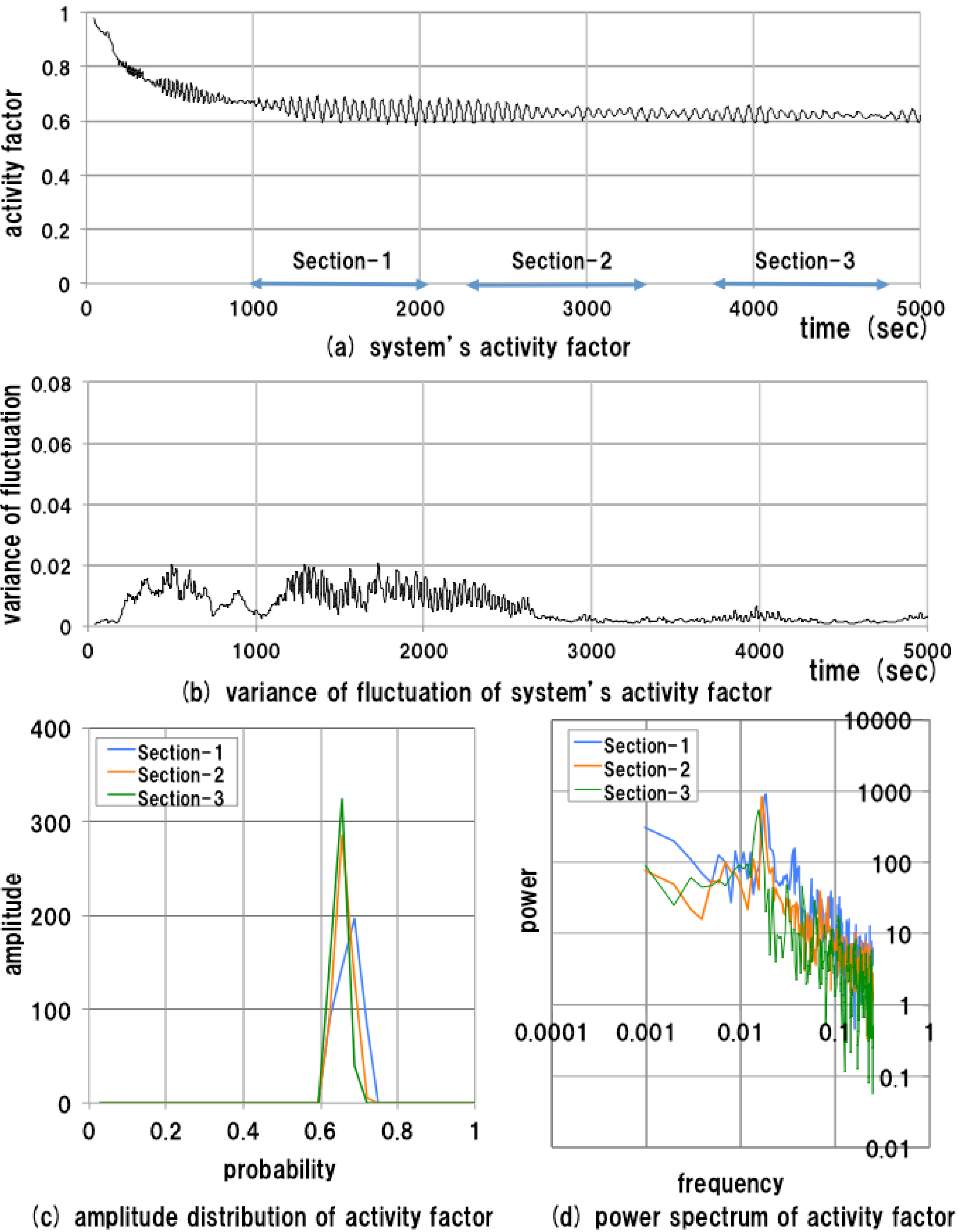
4.3.2. Evaluation of Experiment 1
4.4. Experiment 2 and Evaluation
4.4.1. Setting of Experiment 2

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Point [s] | Number of Worker Agents to be Removed | Number of Agents of the System |
|---|---|---|
| 600 | 1 | 150 |
| 1100 | 2 | 148 |
| 1600 | 4 | 144 |
| 2100 | 8 | 136 |
| 2600 | 16 | 120 |
| 3100 | 32 | 88 |
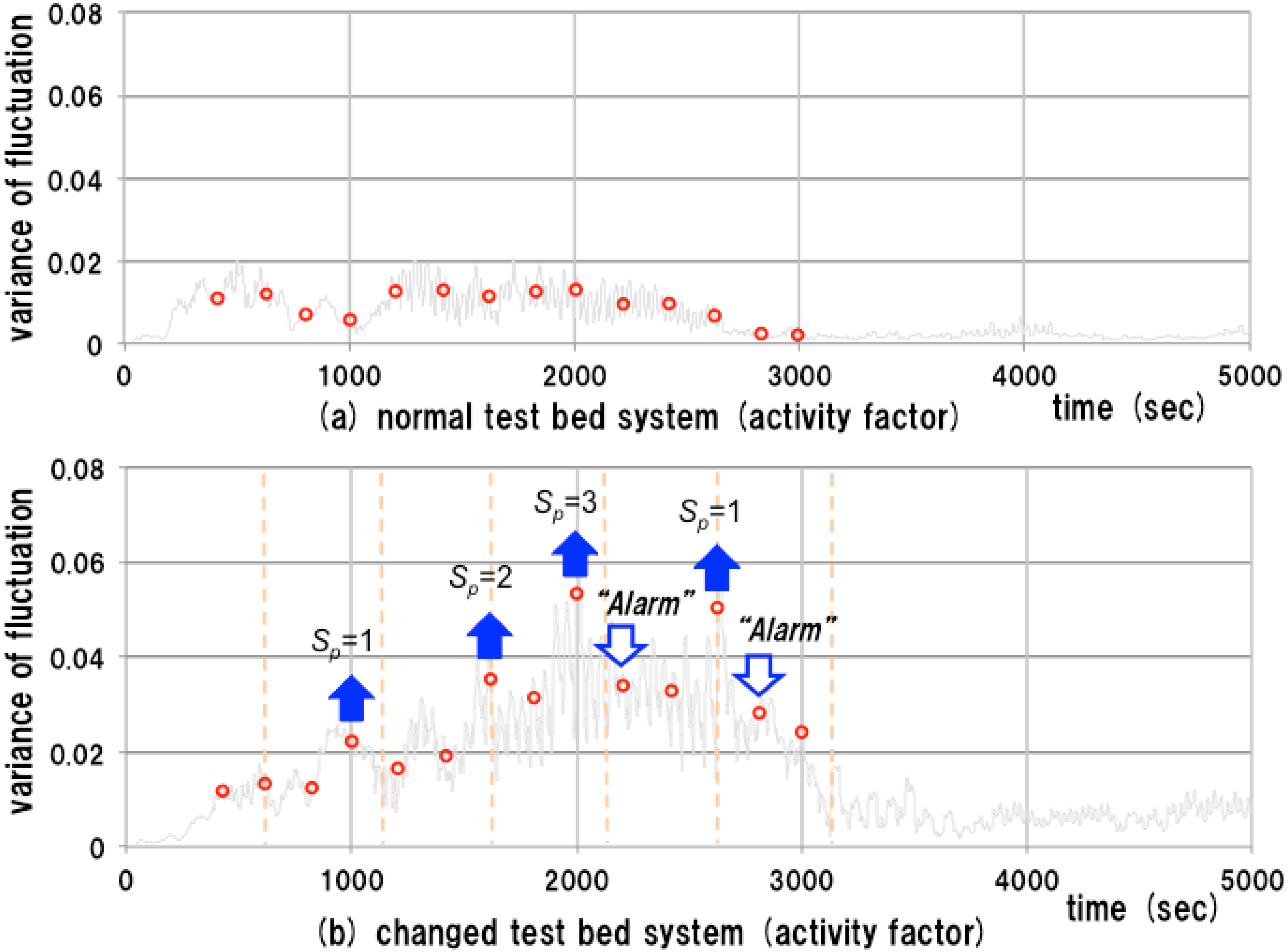
4.4.2. Evaluation of Experiment 2


4.5. Considerations of the Observations of the Runtime System
- -
- At the discrete time point p, the result of observation is given by a time series of observed values; i.e., {, , , , }. Here, .
- -
- The interval of the adjoining observed values, , is given by .
- -
- The maximum value of () is .
- -
- The predefined threshold is ().
- -
- The score at time point p, , is calculated in this procedure.
- -
- At the initial time point , , , and .
- -
- if
- then {if then {; ; “Generate Alarm”};
- if then ;
- if then else }
- else {if
- then {; ;
- if then “Generate Alarm”}
- else };

5. Conclusions
Appendix
Appendix A. Derivation of the Fokker–Planck Equation
Appendix B. Derivation of the Variance of Fluctuation from the Fokker–Planck Equation
Conflicts of Interest
References
- Balchanos, M.; Li, Y.; Mavris, D. Towards a method for assessing resilience of complex dynamical systems. In Proceedings of the 5th International Symposium on Resilient Control System (SRCS2012), Salt Lake City, UT, USA, 14–16 August 2012; pp. 155–160.
- Yu, H.; Shen, Z.; Leung, C.; Miao, C.; Lesser, V.R. A survey of multi-agent trust management systems. IEEE Access 2013, 1, 35–50. [Google Scholar] [CrossRef]
- Yuan, E.; Esfahani, N.; Malek, S. A systematic survey of self-protecting software systems. ACM Trans. Auto. Adapt. Syst. 2014, 8. [Google Scholar] [CrossRef]
- Kaindl, H.; Vallée, M.; Arnautovic, E. Self-Representation for Self-Configuration and Monitoring in Agent-Based Flexible Automation Systems. IEEE Trans. Syst. Man Cybern. Part B 2013, 43, 164–175. [Google Scholar] [CrossRef]
- Amin Rahimian, M.; Aghdam, A.G. Structural controllability of multi-agent networks: Robustness against simultaneous failures. Automatica 2013, 49, 3149–3157. [Google Scholar]
- Ferguson, P.; Huston, G. Quality of Service: Delivering QoS on the Internet and in Corporate Networks; Wiley: New York, NY, USA, 2011. [Google Scholar]
- Takahashi, A.; Kinoshita, T. Configuration and control design model for an agent based Flexible Distributed System. Int. J. Web Intell. Agent Syst. 2011, 9, 161–178. [Google Scholar]
- Takahashi, A.; Abe, M.; Wei, W.; Kinoshita, T. Proactive Control Method based on System Margin in Evolutional Agent System. In Proceedings of the 2012 International Conference on Web Intelligence and Intelligent Agent Technology, Macau, China, 4–7 December 2012; pp. 64–68.
- Gutierrez, C.; Garcia-Magarino, I. Revealing bullying patterns in multi-agent systems. J. Syst. Softw. 2011, 84, 1563–1575. [Google Scholar] [CrossRef]
- Gutierrez, C.; Garcia-Magarino, I.; Fuentes-Fernandez, R. Detection of undesirable communication patterns in multi-agent systems. Eng. Appl. Artif. Intell. 2011, 24, 103–116. [Google Scholar] [CrossRef]
- Suganuma, T.; Imai, S.; Kinoshita, T.; Sugawara, K.; Shiratori, N. A Flexible Videoconference System based on Multiagent Framework. IEEE Trans. Syst. Man Cybern. 2003, 33, 633–641. [Google Scholar] [CrossRef]
- Franch, X. On the Quantitative Analysis of Agent-Oriented Models. In Proceedings of 18th International Conference, CAiSE 2006, Luxembourg, Luxembourg, 5–9 June 2006; pp. 495–509.
- Mani, N.; Garousi, V.; Far, B. Search-based Testing of Multi-agent Manufacturing Systems for Deadlocks based on Models. Int. J. Artif. Intell. Tools 2010, 19, 417–437. [Google Scholar] [CrossRef]
- Amari, S. Characteristics of randomly connected threshold element network and network systems. Proc. IEEE 1972, 59, 35–47. [Google Scholar] [CrossRef]
- Reif, F. Fundamentals of Statistical and Thermal Physics; McGraw-Hill Pub. Co: New York, NY, USA, 1965. [Google Scholar]
- Haken, H. Synergetics-An Introduction, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 1978. [Google Scholar]
- Wang, M.C.; Uhlenbeck, G.E. On the Theory of the Brownian Motion II. Rev. Modern Phys. 1945, 17, 323–342. [Google Scholar] [CrossRef]
- Sasai, K.; Kitagata, G.; Kinoshita, T. Mutiagent Architecture of Knowledge based Network Management Support System. In Proceedings of the 2010 International Conference on Broadband, Wireless Computing, Communication and Applications, Fukuoka, Japan, 4–6 November 2010; pp. 782–787.
- Kim, H.; Lim, Y.; Kinoshita, T. An Intelligent Multiagent System for Autonomous Microgrid Operation. Energies 2012, 5, 3347–3362. [Google Scholar] [CrossRef]
- Uchiya, T.; Hara, H.; Sugawara, K.; Kinoshita, T. Repository-Based Multiagent Framework for Developing Agent Systems. In Transdisciplinary Advancements in Cognitive Mechanisms and Human Information Processing; Wang, Y., Ed.; IGI Global: Hershey, PA, USA, 2011; pp. 60–79. [Google Scholar]
- IDEA. Available online: http://www.k.riec.tohoku.ac.jp/s/idea/index.html (accessed on 1 February 2015).
© 2015 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kinoshita, T. Basic Characteristics of a Macroscopic Measure for Detecting Abnormal Changes in a Multiagent System. Sensors 2015, 15, 9112-9135. https://doi.org/10.3390/s150409112
Kinoshita T. Basic Characteristics of a Macroscopic Measure for Detecting Abnormal Changes in a Multiagent System. Sensors. 2015; 15(4):9112-9135. https://doi.org/10.3390/s150409112
Chicago/Turabian StyleKinoshita, Tetsuo. 2015. "Basic Characteristics of a Macroscopic Measure for Detecting Abnormal Changes in a Multiagent System" Sensors 15, no. 4: 9112-9135. https://doi.org/10.3390/s150409112
APA StyleKinoshita, T. (2015). Basic Characteristics of a Macroscopic Measure for Detecting Abnormal Changes in a Multiagent System. Sensors, 15(4), 9112-9135. https://doi.org/10.3390/s150409112