1. Introduction
Falls among older people are a widely documented public health problem, which can compromise quality of life and cause severe disability [
1]. Around 30% of people aged 65 years or older living in the community and more than 50% of those living in residential care facilities or nursing homes fall every year, and about half of those who fall do so repeatedly [
2].
Study on automatic detection of falls has become more important in last few years because it could allow for the immediate communication of falls to alert medical assistance. This automatic detection could enable rapid intervention, increasing the sense of security of older persons, and reducing some of the negative consequences of falls. The need of an accurate fall detector is hence clear.
Recent sensing hardware developments have made wearable inertial measurement units (IMUs) available for human movement analysis. Consequently, many different approaches have been explored to solve the fall detection problem using wearable IMUs, either considering dedicated wearable sensing units or using the IMU available in commercial smartphones [
3,
4,
5,
6,
7]. The majority of these studies focus on the acceleration signals. The considered approaches can be divided in two main types: threshold-based and machine learning (or data mining) [
6].
Both types are based on features extracted from the recorded signals; these features are usually descriptive of a certain phase of the fall. A model of the different phases of the fall was proposed in [
8], dividing the fall in pre-fall, falling, impact, resting, and recovery phases.
Threshold-based methods for fall detection use single or multiple thresholds on the extracted features (e.g., if the max value of the acceleration during impact is higher than a certain threshold, then a fall is detected) [
9]. On the other hand machine learning techniques use automatic methods like classifiers (e.g., Support Vector Machines) that, starting from the extracted features, try to differentiate between a fall and a normal activity of daily living (ADL) [
10].
The aim of this work is to present a novel feature for fall detection, based on the wavelet-analysis of the impact phase. Wavelet transform (WT) was chosen to examine fall patterns because recorded falls result in a non-stationary signal. WT analyzes the signal at different frequencies with different resolutions. WT is therefore suitable for analyzing signals which are characterized by transient behavior or discontinuities such as falls and other transient events typical of human movement [
11].
The idea of this wavelet-based approach is to consider the average fall pattern of real-world falls as the “prototype fall” (mother wavelet): in order to detect falls, every recorded acceleration signal can then be compared to this prototype through wavelet analysis. The similarity of the recorded signal with the prototype fall is the feature that can be used to discriminate between falls and activities of daily living (ADLs).
Recent reviews and surveys on fall detection using wearable sensors [
3,
4,
5,
6,
7] find that the common issue to the majority of these studies is the lack of real-world falls (unintentional falls of older people), since most of these studies use simulated falls (usually performed by young people). To the best of our knowledge (and as reported in [
3,
4,
5,
6,
7]), until now only five studies have evaluated the performance based on real-world falls. In Bagalà
et al. [
9], thirteen threshold-based algorithms were evaluated on a dataset of 29 real-world falls (the same one as the present study). In Tamura
et al. [
12], a threshold-based algorithm was evaluated on 22 real-world falls. In Kangas
et al. [
13], one of the threshold-based algorithms that was in [
9] was evaluated on 15 real-world falls. Finally, 12 and eight real-world falls were considered in Feldwieser
et al. [
14] and Bloch
et al. [
15], respectively. In addition to these, two other studies considered real-world falls for descriptive purposes. One from Klenk
et al. [
16] which considers five backward real-world falls and the other from Kangas
et al. [
17], which considers five real-world falls, which are a subset of the falls reported in [
13].
These studies have shown that algorithms tuned on simulated falls tend to underperform in real-life situations [
9,
13,
14] and that simulated falls can show differences (although they also share common characteristics) with respect to real-world falls [
16,
17]. Therefore, in the present study, real-world falls and real-world ADLs are used to evaluate the performance of the proposed wavelet-based approach.
Previous applications of WT within human movement analysis have included removing noise from biomechanical data and smoothing [
18], as well as classification of walking patterns and long term activity monitoring [
19,
20,
21,
22,
23].
Using WT in fall detection studies based on inertial sensors has been limited. In Yavuz
et al. [
24] and Yuwono
et al. [
25], WT was used as a feature extraction method from acceleration data. The main limitation of these studies is the fact that performance is tested only on simulated falls. The present study overcomes this limitation. Moreover, the novelty of the proposed approach with respect to these studies is the use of an adapted mother wavelet (built from available fall patterns) instead of using the standard mother wavelets that are normally available. Considering different types of sensors, WT was also used on signals recorded by Doppler radar [
26] and vibration sensors [
27]. This highlights the wide range of possible applications of WT.
2. Methods
2.1. Real-World Falls and ADLs
The fall database from [
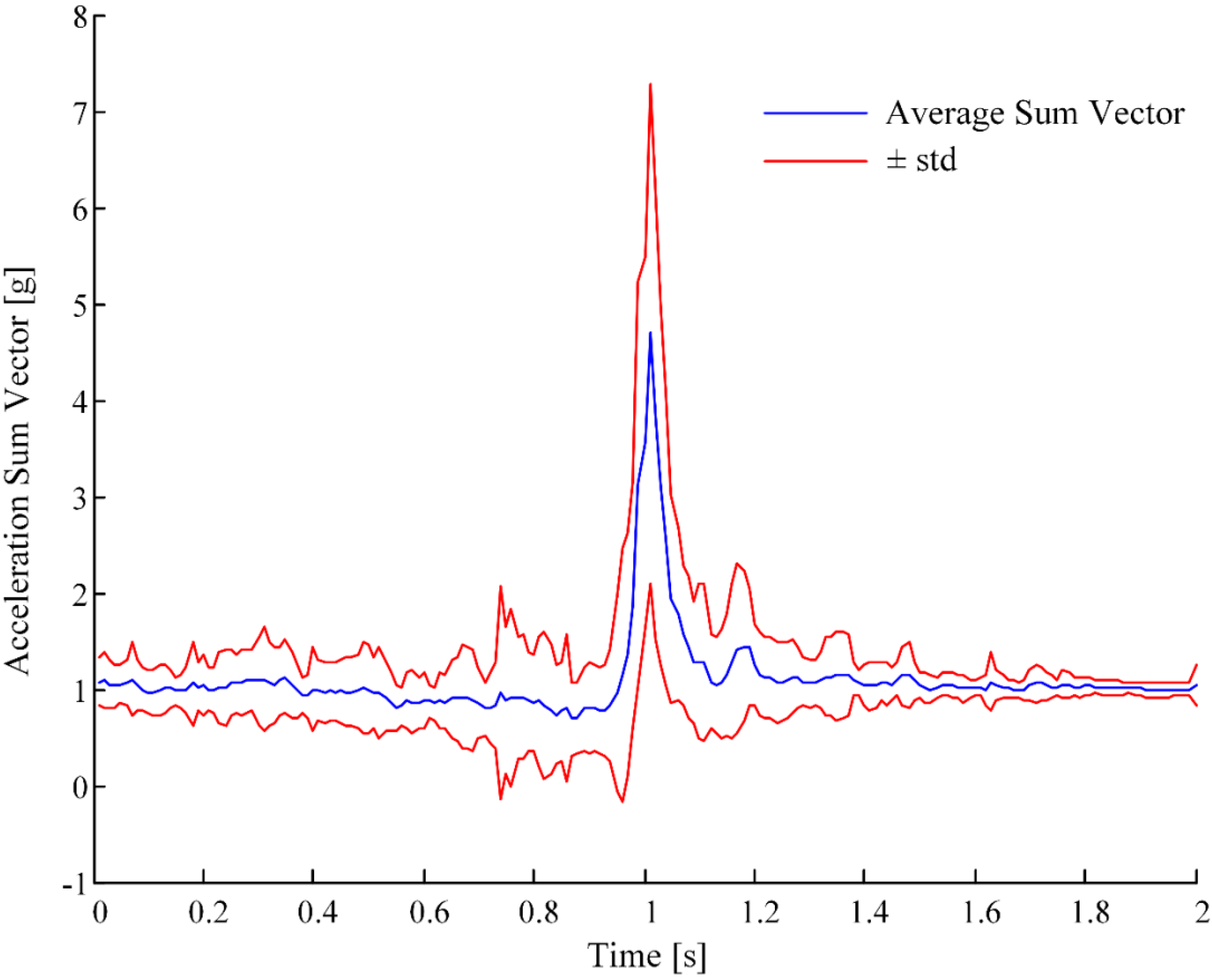
9], which consists of acceleration signals of 29 real-world falls from nine people, was considered. Each fall recording is one minute long, centered on the time of impact. Sixteen of these falls were recorded by the McRoberts Dynaport Minimod sensing unit from six community-dwelling patients (63 years old ± 7 years, four females) with progressive supra-nuclear palsy (PSP). Twelve of these falls were recorded by the McRoberts Dynaport Minimod Hybrid sensing unit from two PSP patients (one 71 year old female, one 72 year old male) staying in a geriatric rehabilitation unit. One fall was recorded by the McRoberts Dynaport Minimod sensing unit from one community-dwelling older person (80 year old female). We considered the acceleration signals recorded by the tri-axial acceleration sensor included in the sensing units. The acceleration sum vector (SV, root sum vector of the three squared accelerometer outputs), averaged over all the recorded falls, is shown in
Figure 1.
We considered the ADL database from [
9], which consists of 1170 acceleration signals (each recording is one minute long) from the PSP patients. These signals were relative to active periods that were not falls, extracted from a total of 168 hours of acceleration recordings [
9]. Active periods were defined as one minute recordings where the difference between the maximum and minimum value of SV was more than 1.01
g (further details on this procedure can be found in [
9]).
All the acceleration signals were recorded with a sampling frequency (Fs) of 100 Hz. Thirteen falls were recorded with a range of ±6 g. The remaining sixteen falls were recorded with a range of ±2 g. The ADLs were all recorded with a range of ±6 g. The sensing unit was held in place by a belt at the lower back of the subjects.
2.2. Computation of the Wavelet-Based Feature
Acceleration sum vectors (SV) of recorded falls usually exhibit an impact phase, presented as a peak, which characterizes the response to the impact (see
Figure 1). Many current fall detection algorithms use a threshold on the value of this peak [
9] in order to differentiate between falls and ADLs. The main idea, as presented in the introduction, is to create a prototype of typical fall pattern (mother-wavelet) by averaging the available real-world fall signals (
Figure 1). Then, a degree of similarity of the signal to test with the mother-wavelet can be computed through wavelet analysis.
Figure 1.
Average (±1 standard deviation) acceleration sum vector (centered on the peak) over the 29 real-world falls.
Figure 1.
Average (±1 standard deviation) acceleration sum vector (centered on the peak) over the 29 real-world falls.
First, we averaged the recorded acceleration signals of real-world falls. In order to do this, we considered the 2-second window centered on the peak for each fall. These two-second windows were then averaged (as in
Figure 1). The average fall pattern obtained was converted into an adapted mother wavelet, defined in the interval [0,1], and satisfying the wavelet definition [
28]. The MATLAB function
pat2cwav provided the adapted mother wavelet Ψ
fall.
After the mother wavelet was created, we computed the wavelet-based feature from a recorded signal as exemplified in
Figure 2. The acceleration SV of each recording (ADL or fall) was scanned, until a value greater than 1.5
g was found, which could represent a possible peak. This condition was set in order to reduce computational cost because wavelet analysis only starts if SV satisfies that condition. It was set to a low value so that no falls would be missed. If the condition was satisfied, then a 2-second window was centered on the corresponding sample and became the candidate window. We then compared the signal in the current window with the mother-wavelet by computing the continuous wavelet transform (CWT) coefficients (
CWTcoeff).
Figure 2.
Workflow of the procedure that is used to compute the wavelet-based feature.
Figure 2.
Workflow of the procedure that is used to compute the wavelet-based feature.
These coefficients estimate the similarity of the candidate window with the mother wavelet and with scaled and translated versions of it:
In Equation (1), a and b are the scale and the translation parameters, respectively. CWTcoeff (a,b) describes the similarity (the higher the coefficient, the higher the similarity) between the candidate and the mother wavelet, at different scales (a) and translations (b). Then the maximum value of CWTcoeff was chosen.
In many contexts, it is natural to define the scales (a) in terms of the duration of the patterns to be detected (in this case, 2 s) instead of defining it in terms of the dilation factor. Since the mother wavelet was defined in the normalized interval [0,1] and it was generated from a pattern of 2 s, the maximum coefficient would be at a scale a = 2 Fs, if CWT is applied to a signal with the same shape of the mother wavelet. According to these considerations, the search for the maximum CWT coefficient was limited to scales in an interval centered on 2 Fs: 2 Fs − 0.5 Fs ≤ a ≤ 2 Fs + 0.5 Fs.
Moreover, since the maximum CWTcoeff values are expected to be near the center of the window (because both the mother wavelet and the candidate window are centered on the peak) the CWT coefficients with translations (b) smaller than 0.5 Fs or greater than 1.5 Fs were not considered. This was done in order to avoid possible border effects.
Then, the scanning of the signal continued. Each time SV was over the threshold, the analysis was repeated. In the end, the feature value was the overall maximum value of
CWTcoeff. If no SV value over the threshold was found in the recording, then the feature value was zero (see
Figure 2).
The wavelet-based feature is a continuous score which is greater than or equal to zero. The higher the score value, the higher the similarity to the mother wavelet and the probability that the recorded signal is a fall.
2.4. Software
We used MATLAB R2013b for all the analyses in this study. We used the MATLAB function perfcurve to compute the ROC curve and the function signrank to perform the paired Wilcoxon signed-rank test.
3. Results and Discussion
The ROC curve of the proposed wavelet-based feature is presented in
Figure 3.
The wavelet-based feature shows a higher ROC curve than the other features (LPC and UPV) for most of the possible combinations of sensitivity and specificity (
Figure 3). In
Table 1, two performance measures are reported: the AUC and the maximum YI values.
Table 1.
Performance of the three presented features. Area under the Curve and maximum Youden’s Index values are reported with 95% Confidence Intervals. In the last two columns the p-values of the comparisons between features are reported. * = statistical significant difference (considering the Bonferroni correction for multiple comparisons).
Table 1.
Performance of the three presented features. Area under the Curve and maximum Youden’s Index values are reported with 95% Confidence Intervals. In the last two columns the p-values of the comparisons between features are reported. * = statistical significant difference (considering the Bonferroni correction for multiple comparisons).
| Wavelet | UPV | LPV | p VS UPV | p VS LPV |
|---|
| AUC [95% CI] | 0.918 [0.848 0.99] | 0.898 [0.848 0.949] | 0.821 [0.724 0.919] | 0.152 | 0.002 * |
| max YI [95% CI] | 0.797 [0.697 0.897] | 0.713 [0.613 0.813] | 0.515 [0.45 0.58] | 0.002 * | 0.0078 * |
The AUC value of the proposed feature is 0.918, significantly higher (and therefore better) than the AUC of LPV (0.821). The AUC of the proposed feature is also higher with respect to the AUC of UPV (0.898), but this difference does not reach statistical significance. In fact, it can be noted that in this case the confidence intervals are broad (because of the small sample size) and overlapping.
The maximum YI value of the wavelet-based feature (0.797) is significantly higher (and therefore better) than both the UPV (0.713) and LPV (0.515) features. AUC and max YI value are performance measures which evaluate different aspects. AUC is a global indicator (it considers all points of the ROC curve) of performance. Maximum YI on the other hand is an indicator of how the feature performs in a single point in the ROC curve (corresponding to the best combination of sensitivity and specificity).
Considering the global performance indicator (AUC), the wavelet-based features significantly outperforms only the LPV feature. However, considering the single best possible combination of sensitivity and specificity (maximum YI), the wavelet-based feature significantly outperforms both UPV and LPV. The combinations of sensitivity and specificity corresponding to the maximum YI value for all the three features are reported in
Table 2. The wavelet-based feature shows a very high sensitivity (90%), while maintaining a high specificity (89.7%). The obtained specificity of 89.7% corresponds to 10.3% of false positive rate. Considering the 1170 ADL recordings, 120.5 false alarms were found. Considering that the ADLs were extracted from a total of 168 h of recording, we can estimate 0.72 false alarms/hour. So, the best combination of the proposed feature is 90% sensitivity and 0.72 false alarms/hour.
Table 2.
Combination of sensitivity and specificity with the maximum Youden’s Index and corresponding threshold for the three features.
Table 2.
Combination of sensitivity and specificity with the maximum Youden’s Index and corresponding threshold for the three features.
| Sensitivity | Specificity | Threshold |
|---|
| Wavelet | 90% | 89.7% | 31.3 |
| UPV | 85% | 86.3% | 2.79 g |
| LPV | 90% | 61.5% | 0.5 g |
As shown in
Table 2, UPV shows lower sensitivity (85%) and lower specificity (86.3%, corresponding to 0.95 false alarms/hour) with respect to the wavelet-based feature. LPV shows the same value of sensitivity (90%) and a very low value of specificity (61.5%, corresponding to 2.68 false alarms/hour).
If we considered the fall detection algorithms that were tested on this same dataset in a previous work [
9], their false alarm rates would range from 0.14 to 6.2 false alarms/hour. Although a subset of these algorithms has a lower false alarm rate than our proposed approach, none of these has a corresponding sensitivity of 90%, as our approach does. Moreover, these algorithms also consider the resting phase in order to improve their specificity and consequently their false alarm rate.
In conclusion, the proposed wavelet-based feature shows a combination of sensitivity and specificity that outperforms impact-based features that are commonly used in fall detection studies. However, due to the high number of false alarms, it cannot be used alone to obtain an effective real-life fall detector. The proposed feature should be combined through multiple thresholds or machine learning techniques, with features extracted from other fall phases in order to improve the overall fall detection performance. Examining resting and recovery phases could be critical in order to reduce false alarms.
The main limitations of this study are the small sample size and the fact that the recorded real-world falls were mainly from a rare disease population (PSP subjects). It should be tested whether the proposed approach can be successfully generalized to the older population. The future availability of additional real-world falls from the database that is being collected during the FARSEEING [
32] European project will help to overcome these limitations.



 ,
, 



{kind=link}
{kind=link}
{kind=link}