
A Space-Time Network-Based Modeling Framework for Dynamic Unmanned Aerial Vehicle Routing in Traffic Incident Monitoring Applications

Abstract
:1. Introduction
2. Literature Review
2.1. Related Studies

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper | Model and Formulation | Solution Algorithm | Factors under Consideration |
|---|---|---|---|
| Ryan et al. (1998) [15] | Multi-vehicle Traveling Salesman Problem | Reactive tabu search heuristic within a discrete event simulation | Target coverage, time window |
| Hutchison (2002) [16] | Two-stage model for problem decomposition and single-vehicle TSP problem | Simulated annealing method | Target coverage, UAV flight distance |
| Yan et al. (2010) [17] | Multi-vehicle TSP problems | Genetic algorithm | Flying direction on each link |
| Ousingsawat and Campbell (2004) [18] | Cooperative reconnaissance problem | A* search and binary decision | Maximum time duration, target coverage, UAV conflicts |
| Tian et al. (2006) [19] | Cooperative reconnaissance mission planning problem | Genetic algorithm | Maximum time duration , UAV conflict, time window |
| Wang et al. (2008) [20] | Multi-objective optimization model | Ant colony system algorithm | Minimum length and threat intensity of the path |
| Liu, Peng, Zhang (2012) [21] | Multi-objective optimization model | Non-dominated sorting genetic algorithm | Number of UVAs |
| Liu, Peng, Chang, and Zhang, (2012) [22] | Multi-objective optimization model | Multi-objective evolutionary algorithm | Time window |
| Liu, Chang, and Wang (2012) [23] | Traveling Salesman Problem | Simulated annealing method | Target coverage, number of UAVs |
| Liu, Guan, Song, Chen, (2014) [24] | Multi-objective optimization model | Evolutionary algorithm based on Pareto optimality technique | UAV flight distance, number of UAVs |
| Mersheeva and Friedrich (2012) [25] | Mixed-integer programming model | Variable neighborhood Search | Target coverage, UAV flying time |
| Sundar and Rathinam (2012) [26] | Single-vehicle UAV routing problem | mixed integer, linear programming | Target coverage, refuel depot |
| This paper by Zhang et al. | Linear integer programming model within space-time network | Problem decomposition through Lagrangian relaxation and least cost shortest path algorithm for subproblems | Detecting recurring, non-recurring traffic conditions and special events |
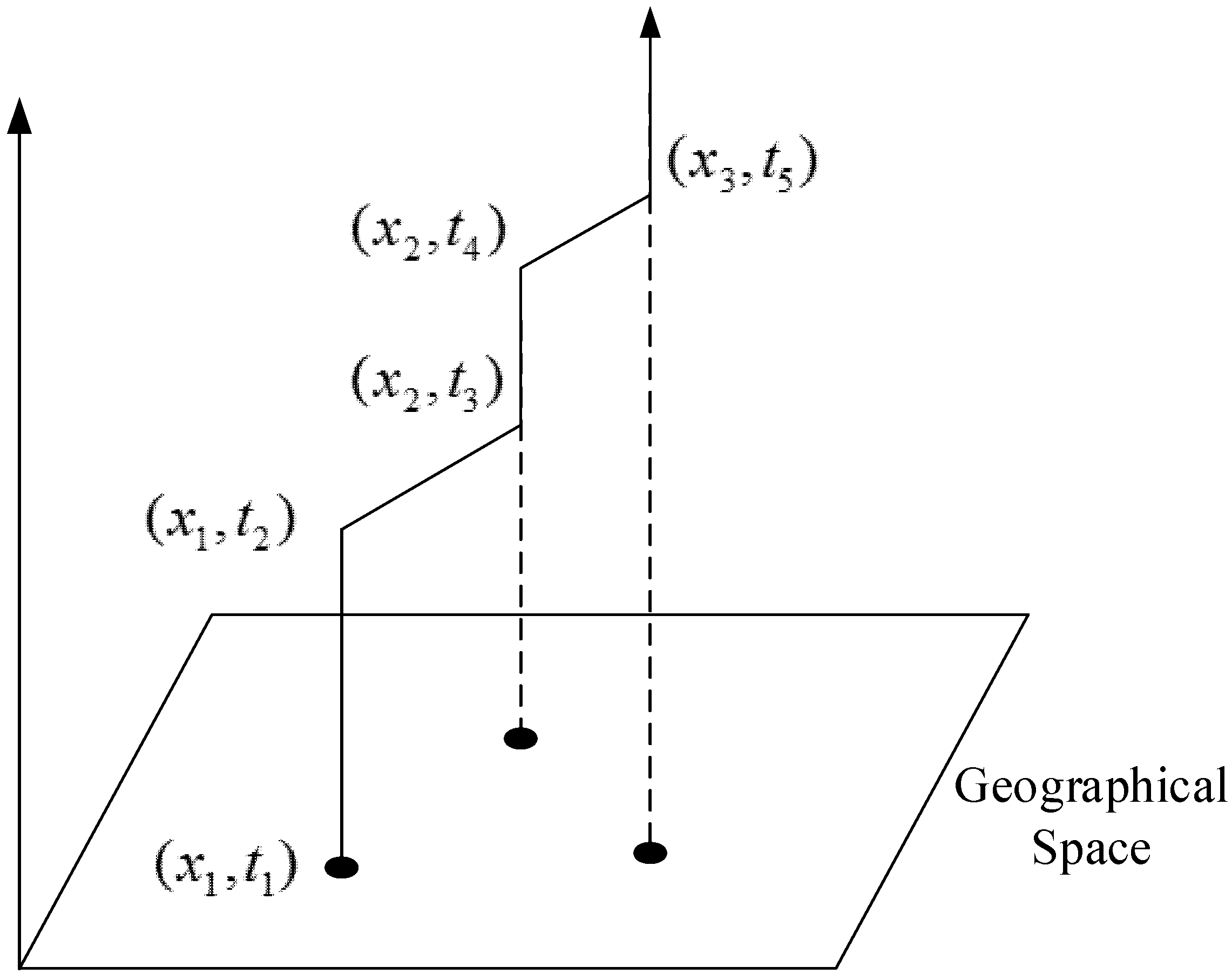
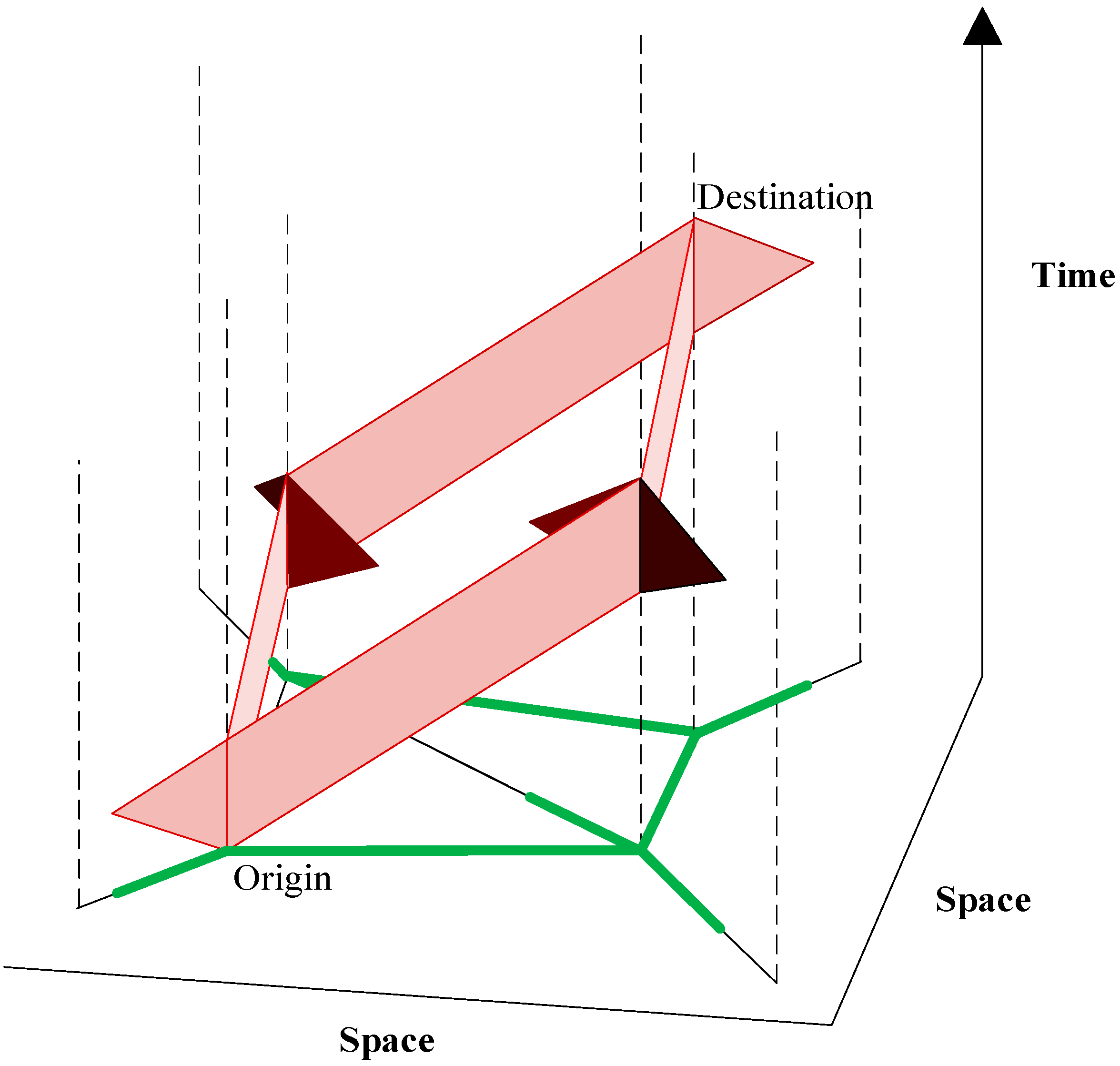
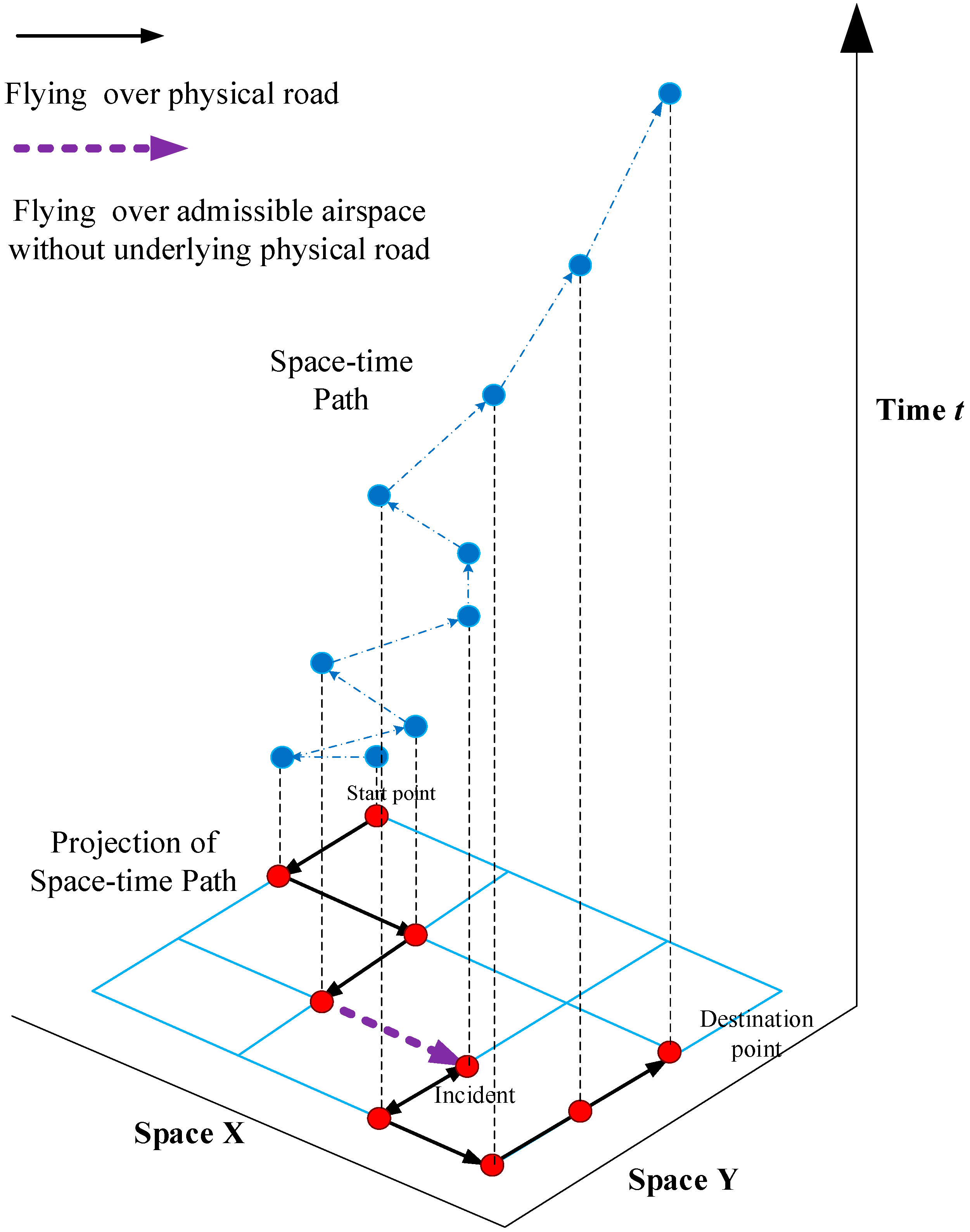
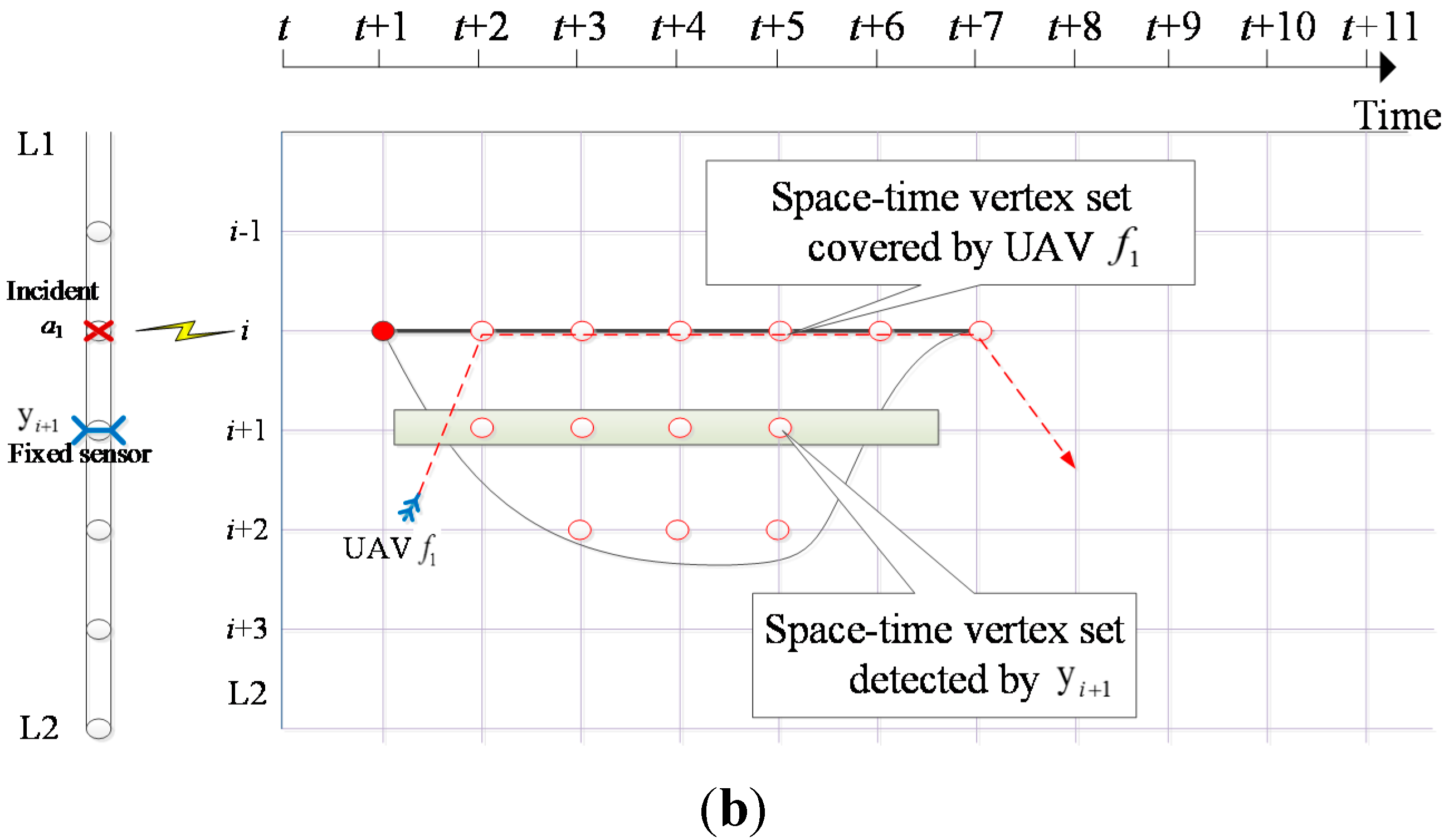
2.2. Illustrations of Conceptual Framework for Space-Time Networks





3. Model Description
3.1. Notations
| Symbol | Definition |
|---|---|
| set of traffic accidents/events | |
| set of nodes in transportation network | |
| set of space-time vertexes | |
| set of space-time traveling arcs that UAV can select | |
| set of UAVs | |
| indices of traffic accidents/events, | |
| indices of candidate sensor locations or possible UAV locations, | |
| indices of time stamps | |
| indices of space-time vertexes | |
| index of space time traveling arc, | |
| index of unmanned plane, | |
| indices of origin and destination locations of UAV | |
| earliest departure time and latest arriving time of UAV | |
| start time of event | |
| set of space-time vertexes which can represent the space-time impact area of event | |
| subset of time-space vertex set which excludes the space time vertexes covered by the fixed detectors. | |
| cost for UAVs to travel between location i and location j, on time period between time t and time s | |
| di | cost for constructing a fixed sensor at location i |
| fail-to-detect cost of event a at location i and time t | |
| B | total budget for constructing fixed sensors |
| K(f) | total distance budget for operating UAV f |
| Symbol | Definition |
|---|---|
| event detected variable (= 1, if event a is detected at location i, time t; otherwise = 0) | |
| event virtually detected variable (= 1, if event a is virtually detected at location i, time t; otherwise = 0) | |
| fixed sensor construction variable (= 1, if fixed sensor is allocated at location i; otherwise = 0) | |
| UAV routing variable (= 1, if space-time arc (i,j,t,s) is selected by UAV f; otherwise = 0) |
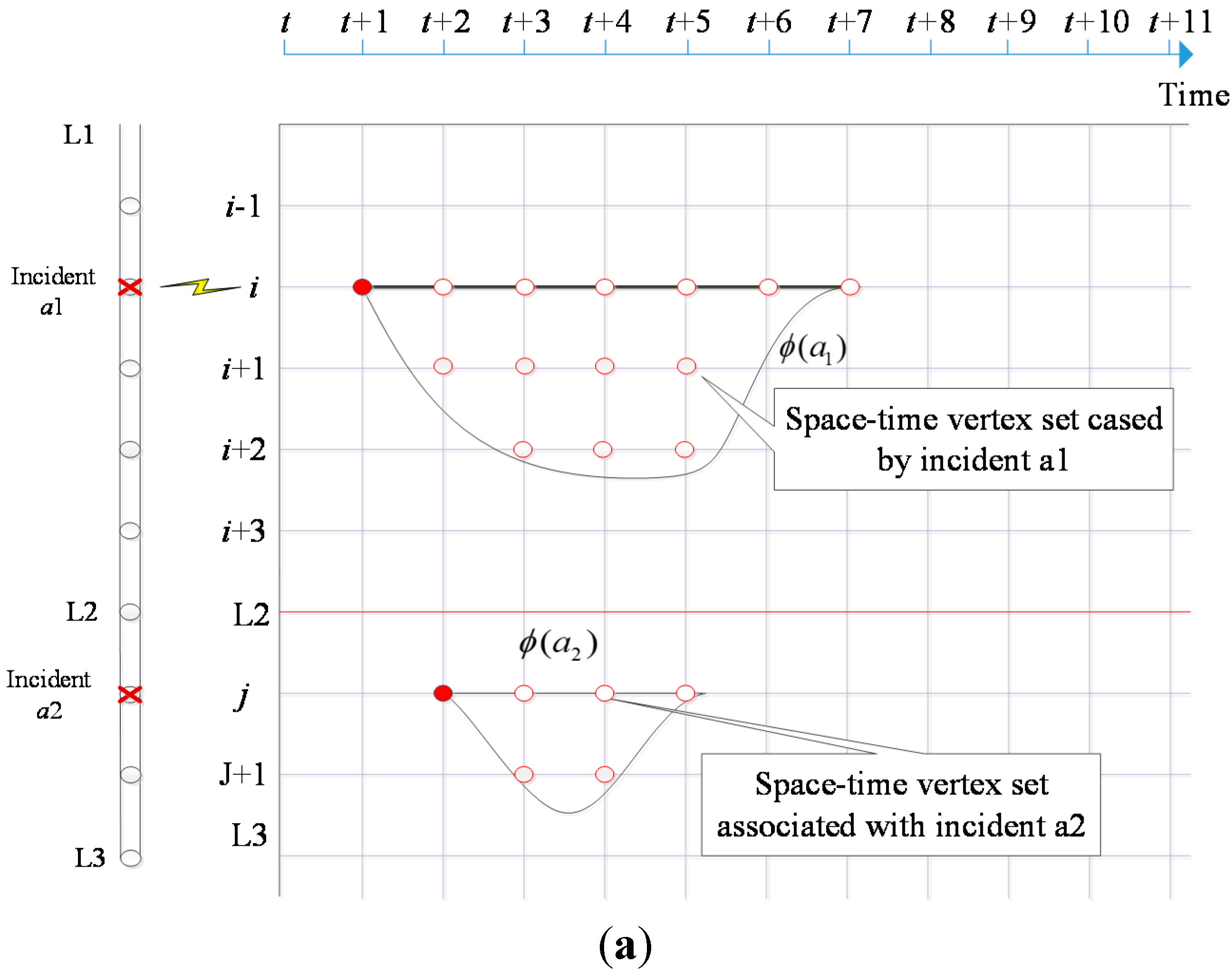
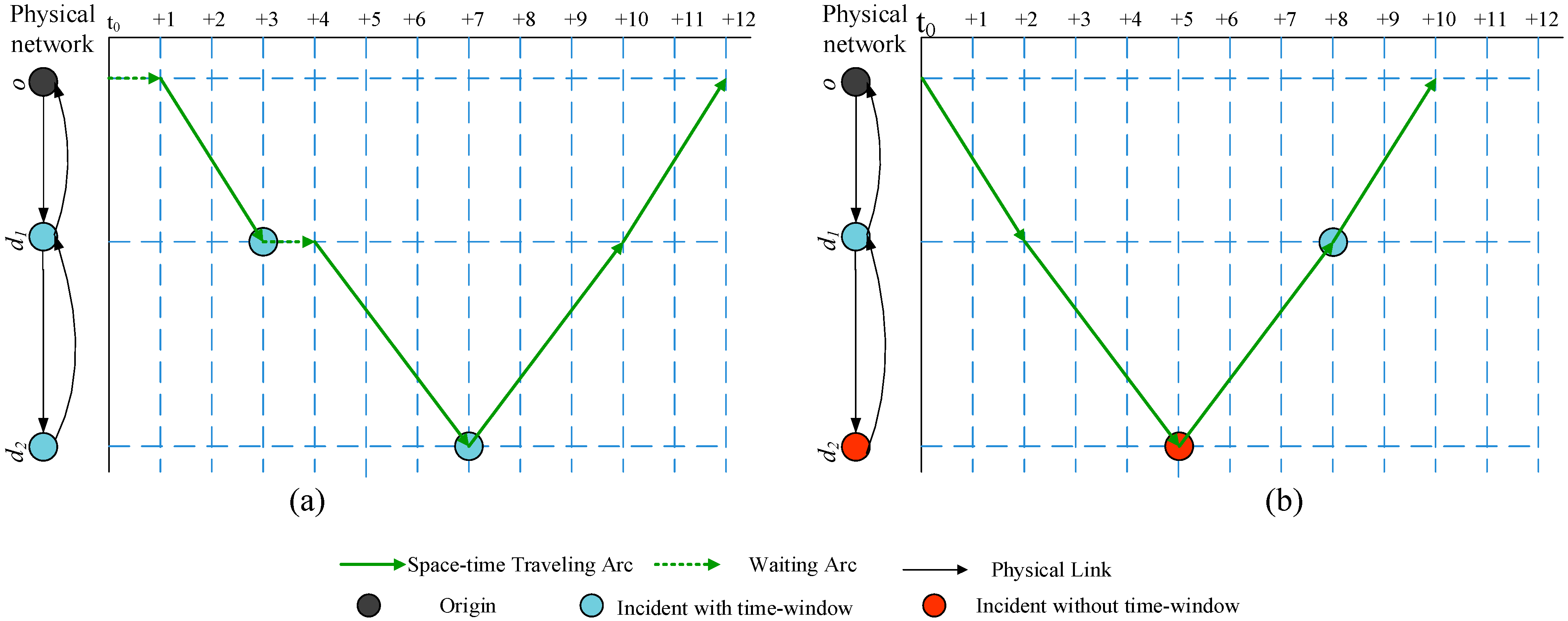
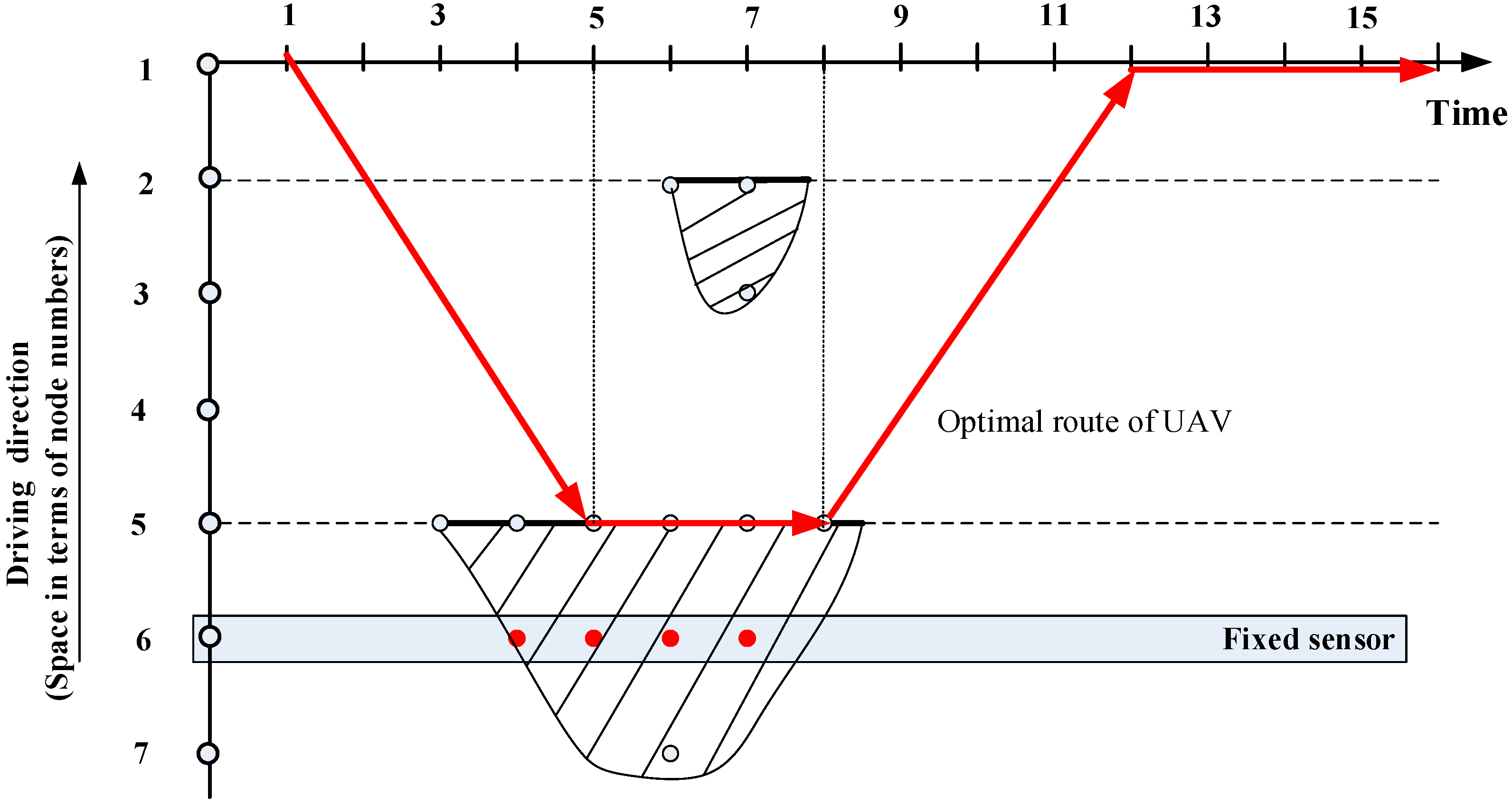
3.2. Space-Time Network Construction
- Step 1: Build space-time vertex V
- Add vertex to for and each t.
- Step 2: Build space-time arc set E
- Step 2.1: Add space-time traveling arc to , for physical link, where is the link travel time from node i to node j starting at time t.
- Step 2.2: Add a set of space-time staying/waiting arcs for a pair of vertexes to E, for each time t.
| Link | Travel Time |
|---|---|
| 2 | |
| 3 |

| Incident Num. | Location of Vertex | Start Time |
|---|---|---|
| Case (a)-1 | 3 | |
| Case (a)-2 | 7 | |
| Case (b)-1 | 8 | |
| Case (b)- 2 | / |
3.3. Model Description
3.4. Model Simplification
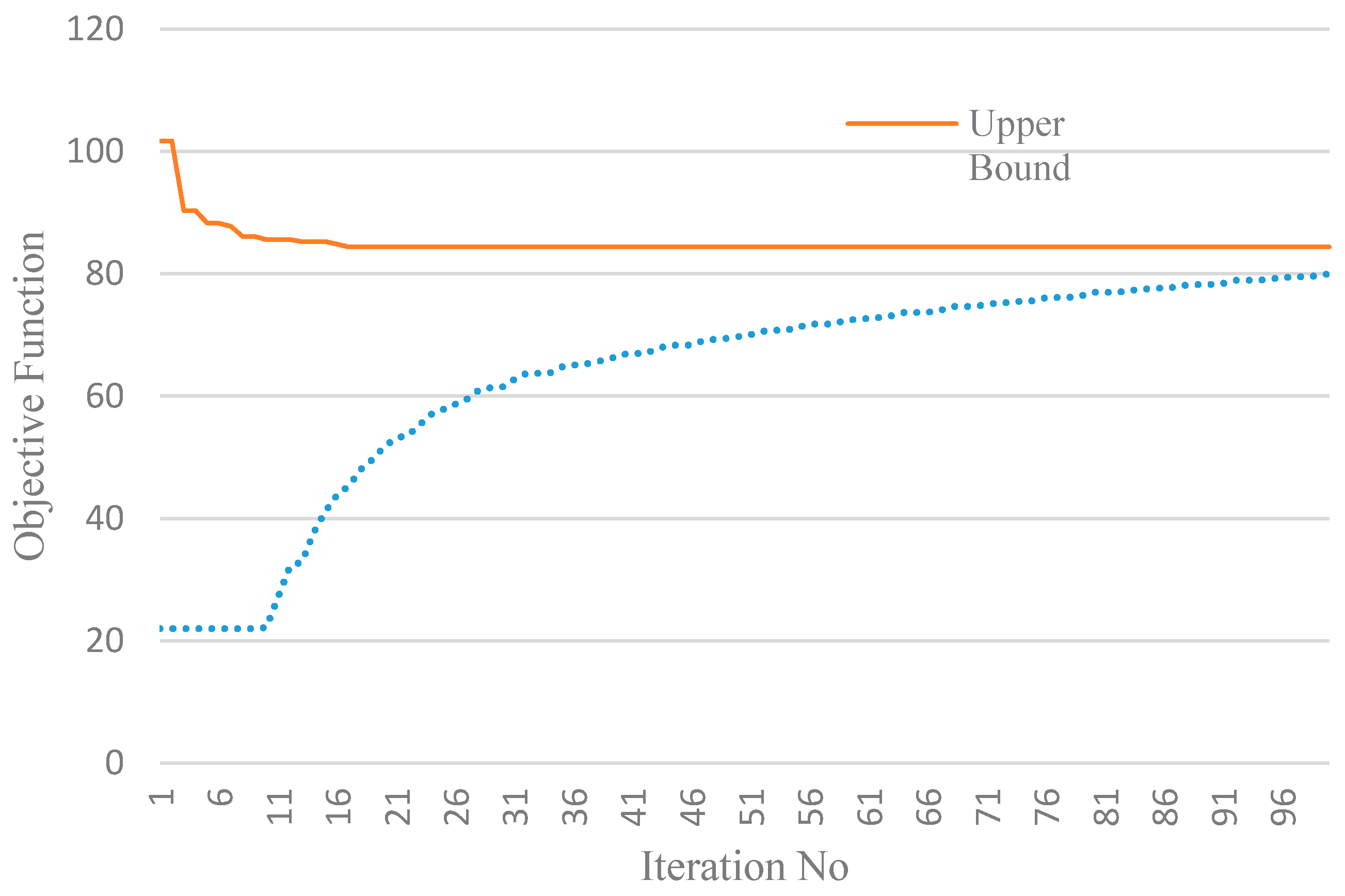
4. Lagrangian Relaxation-Based Solution Algorithms
4.1. Lagrangian Function
4.2. Solution Procedure
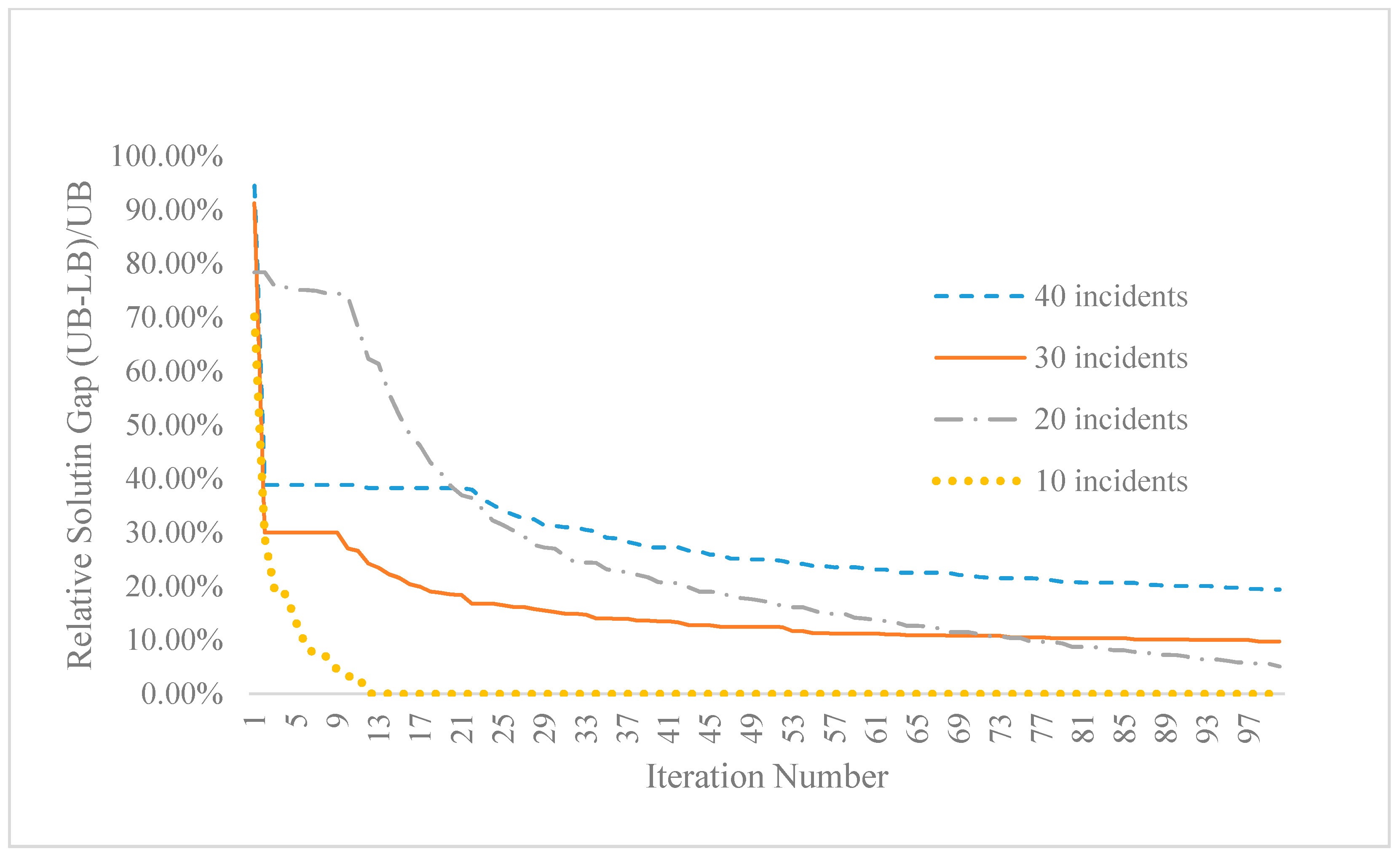
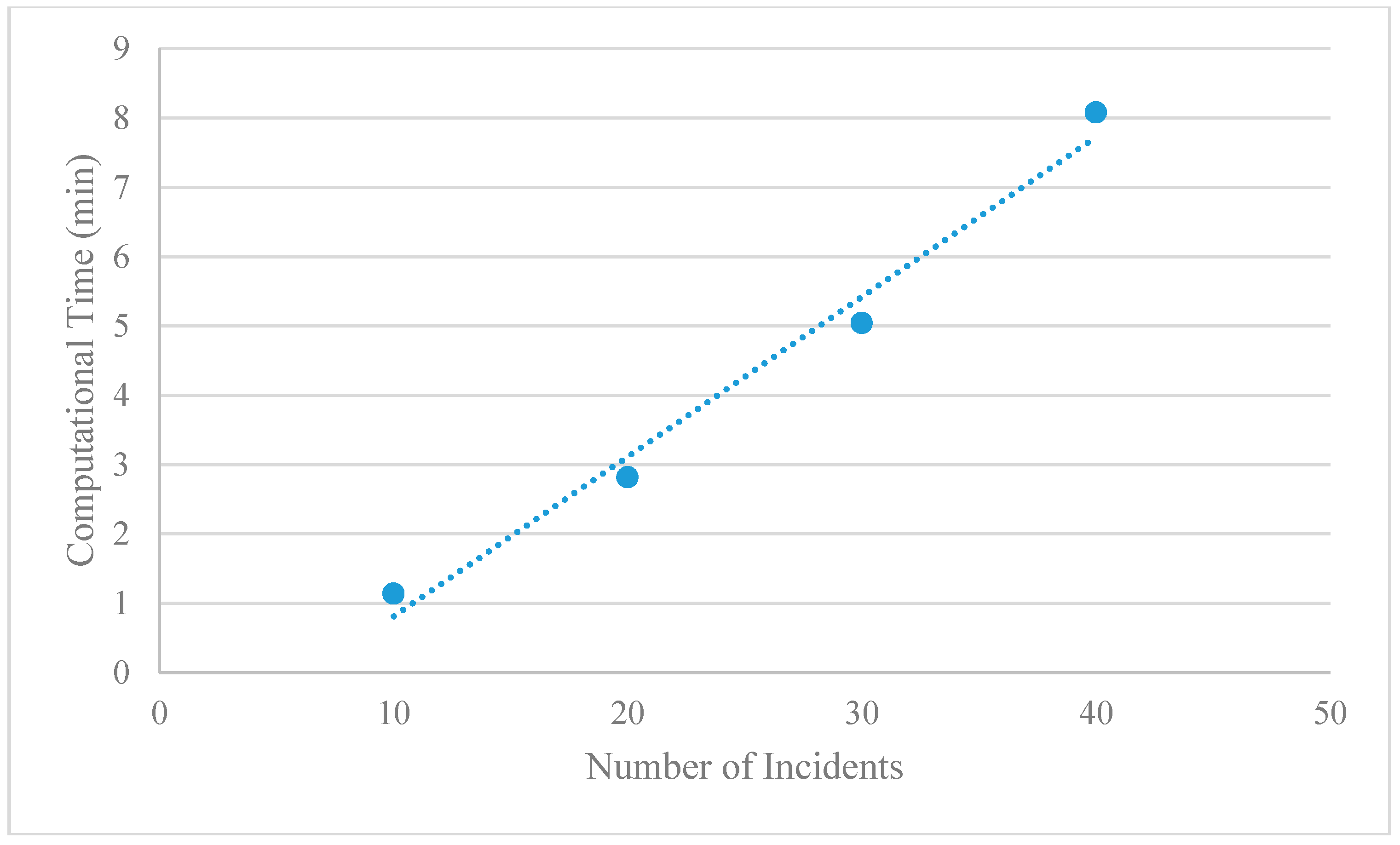
5. Numerical Experiments
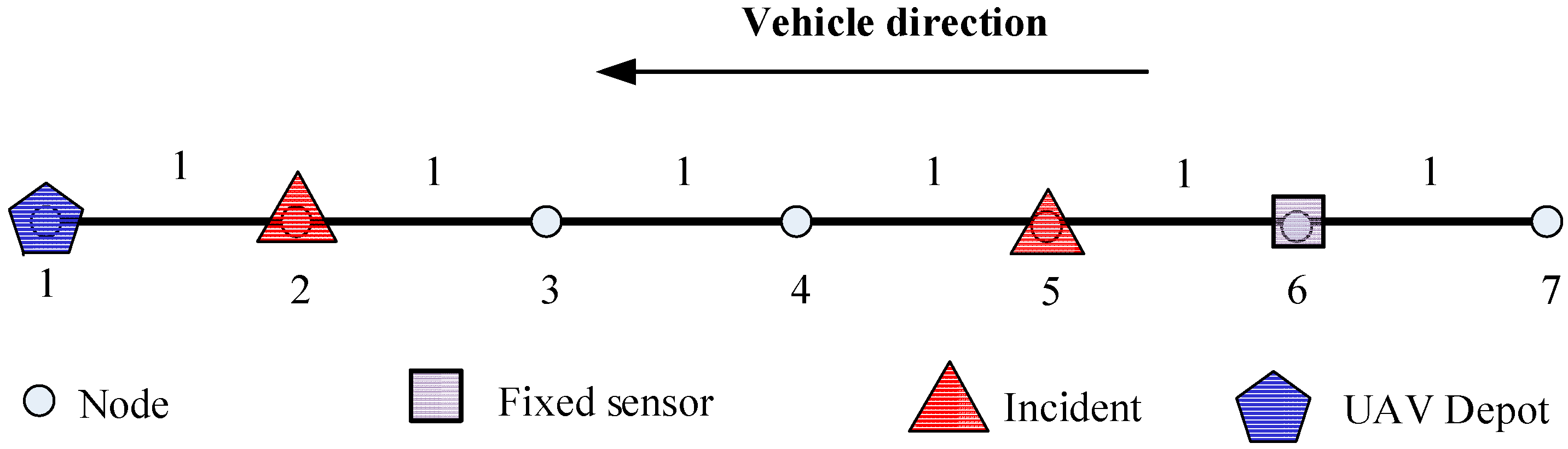
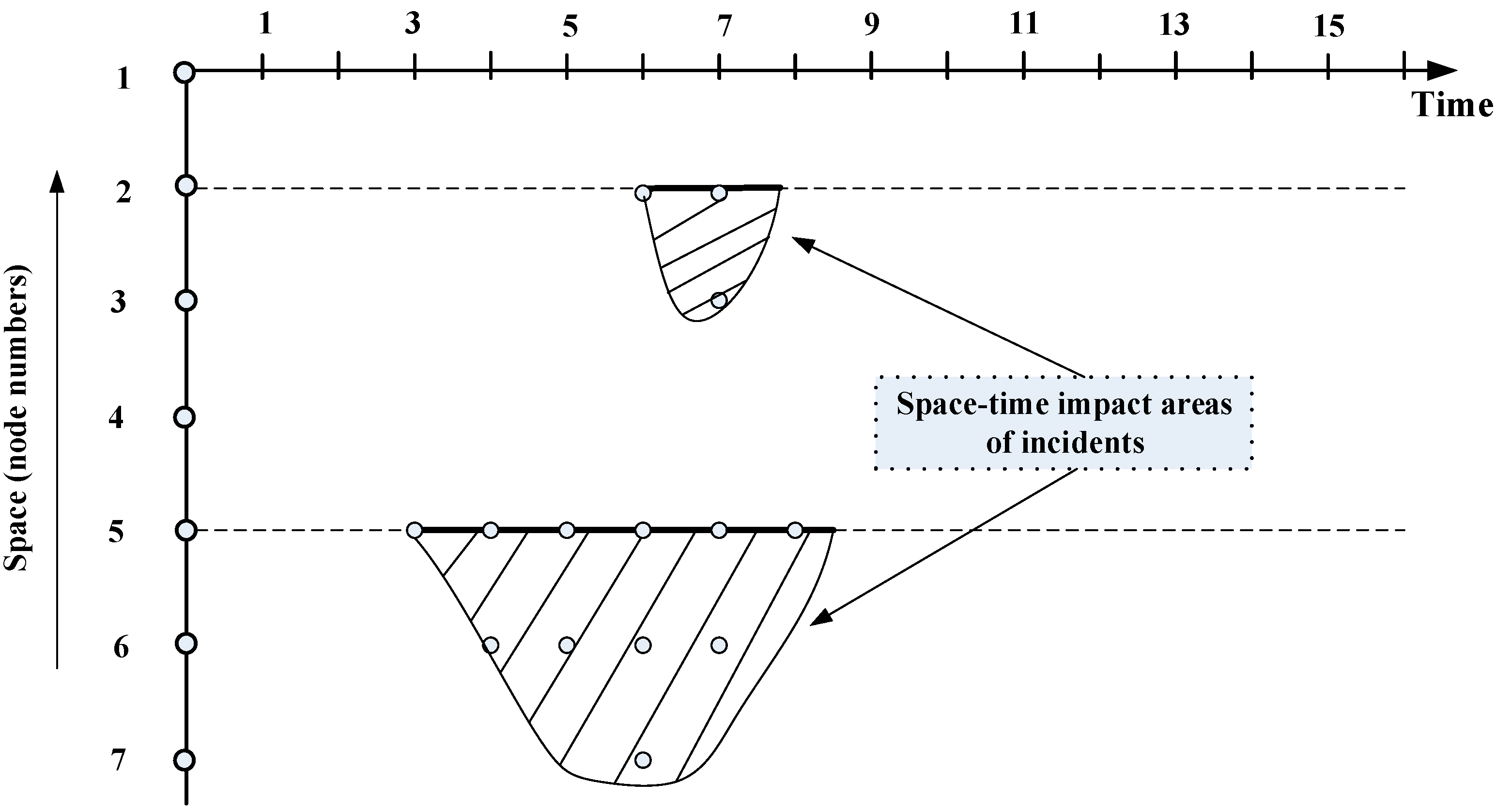
5.1. Simple Illustrative Example



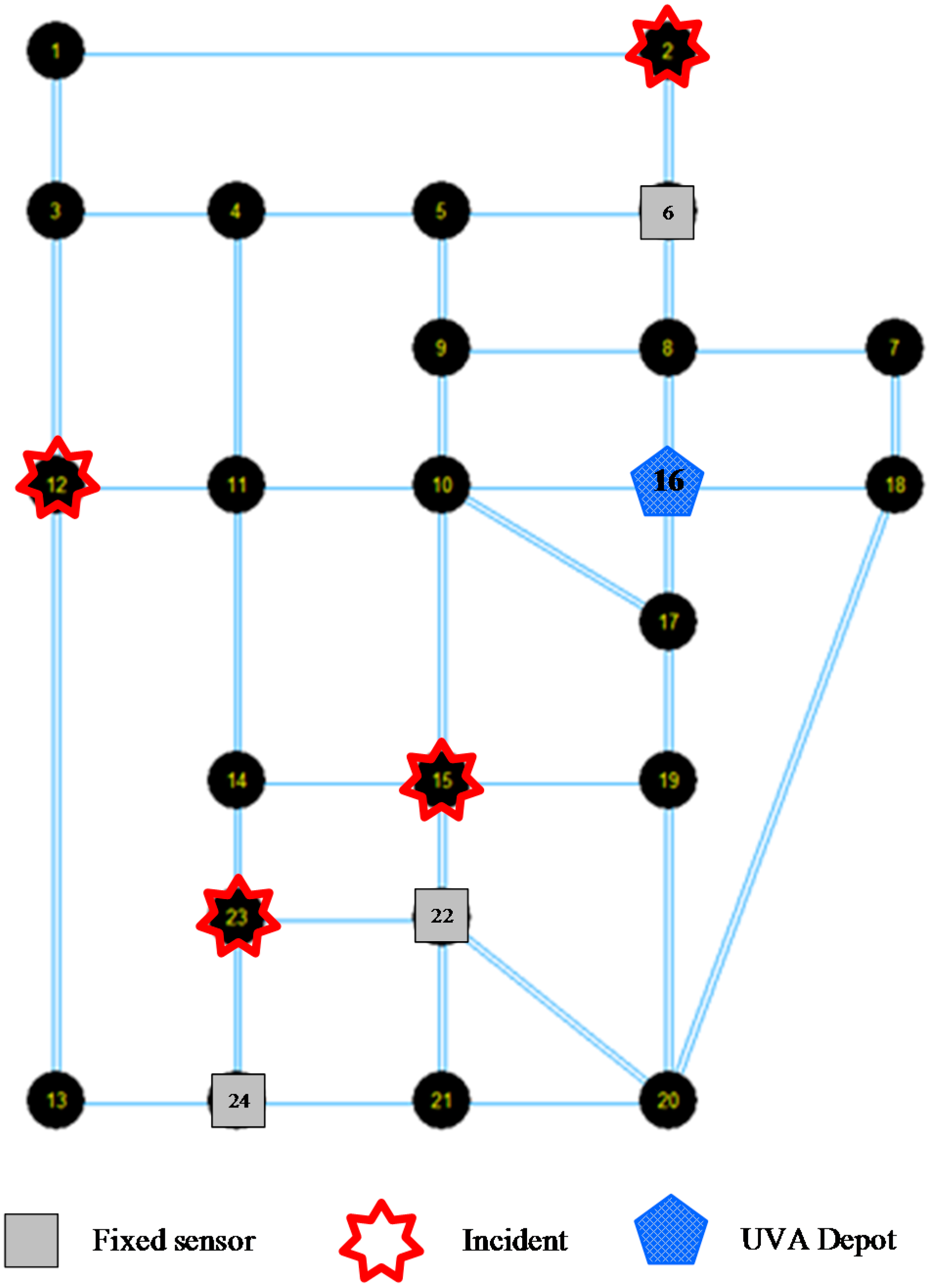
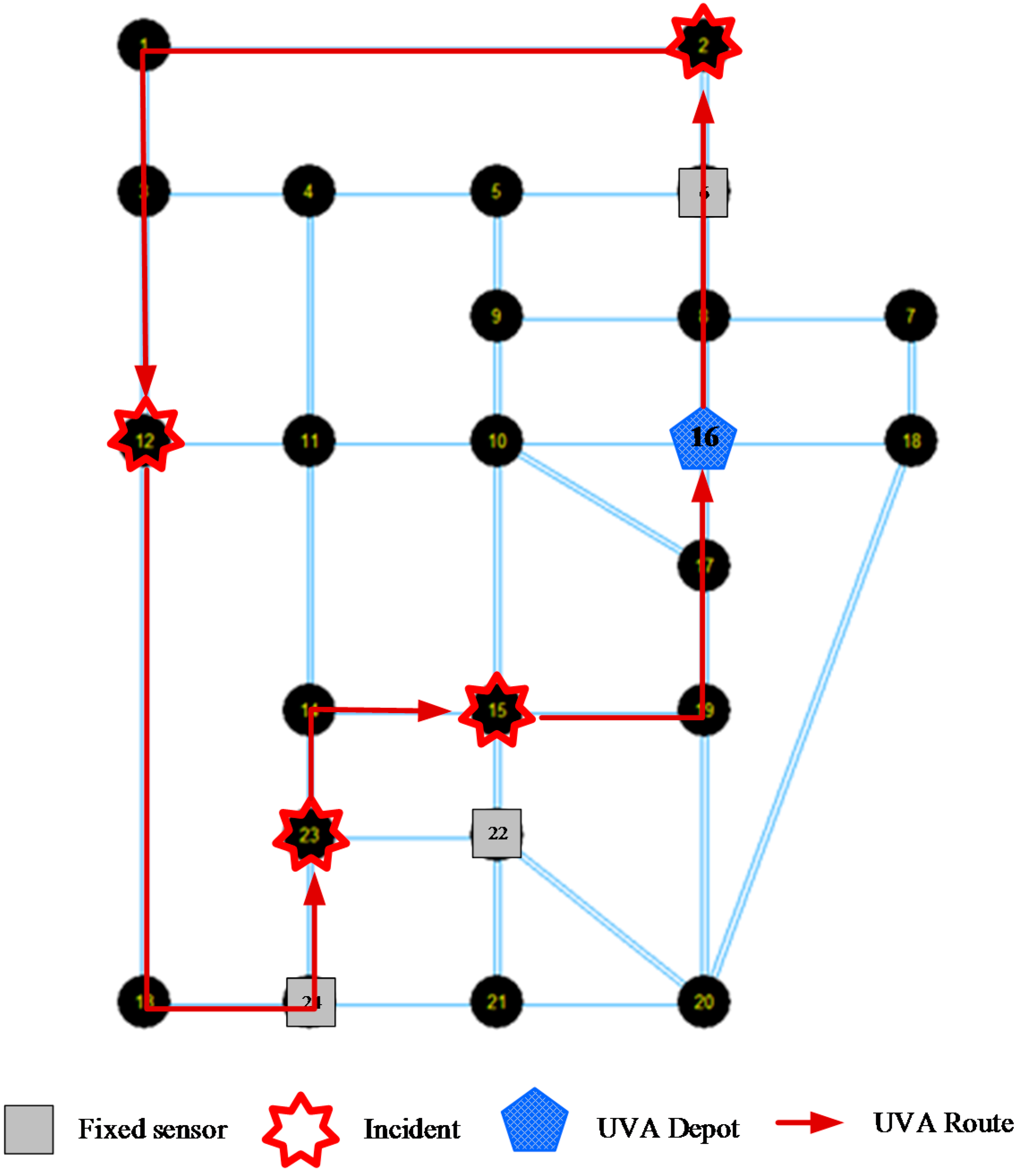
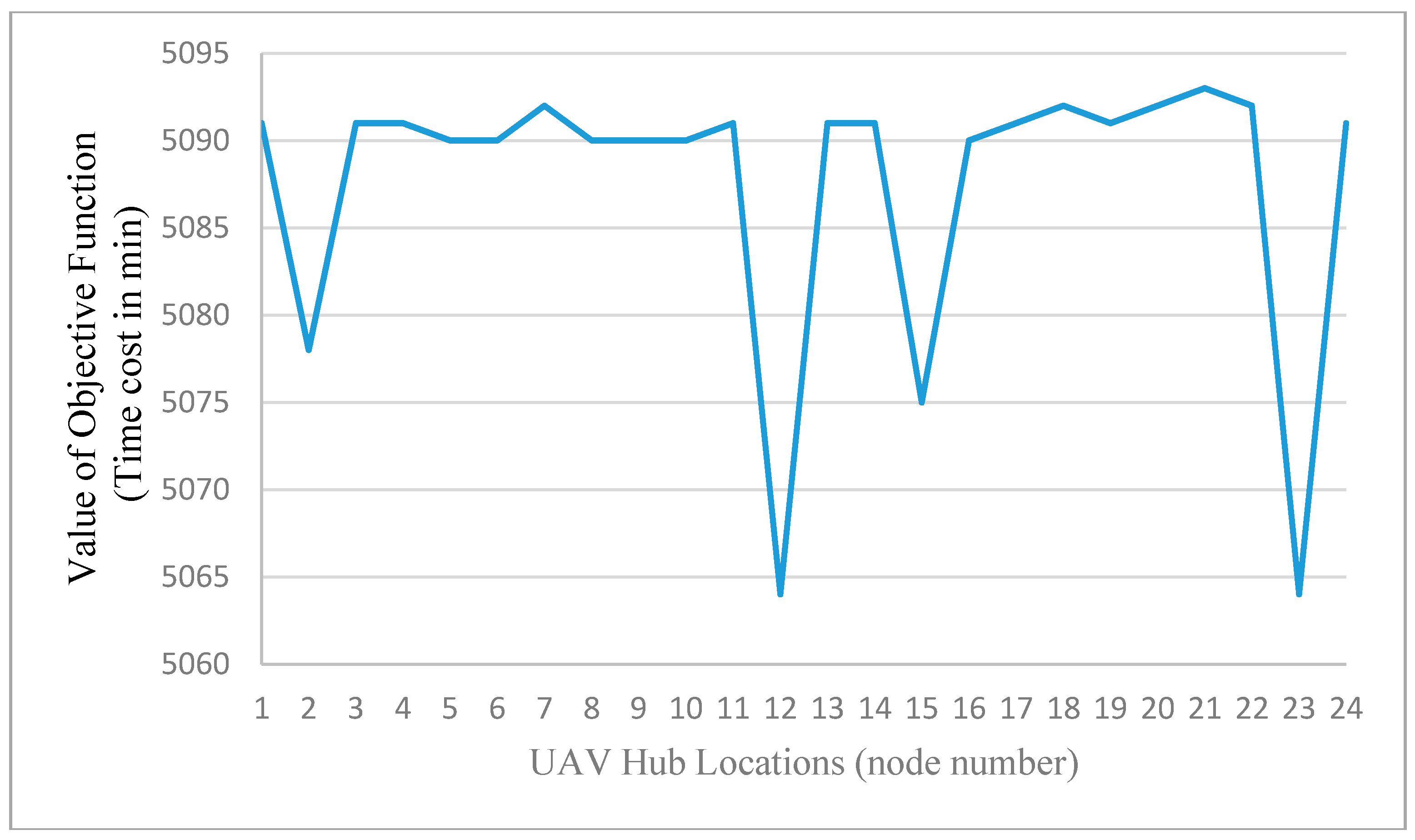
5.2. Medium-Scale Experiments

| From Node | To Node | Flying Time (min) | From Node | To Node | Flying Time (min) | From Node | To Node | Flying Time (min) | From Node | To Node | Flying Time (min) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 12 | 8 | 7 | 6 | 13 | 24 | 8 | 19 | 17 | 4 |
| 1 | 3 | 8 | 8 | 9 | 20 | 14 | 11 | 8 | 19 | 20 | 8 |
| 2 | 1 | 12 | 8 | 16 | 10 | 14 | 15 | 10 | 20 | 18 | 8 |
| 2 | 6 | 10 | 9 | 5 | 10 | 14 | 23 | 8 | 20 | 19 | 8 |
| 3 | 1 | 8 | 9 | 8 | 20 | 15 | 10 | 12 | 20 | 21 | 12 |
| 3 | 4 | 8 | 9 | 10 | 6 | 15 | 14 | 10 | 20 | 22 | 10 |
| 3 | 12 | 8 | 10 | 9 | 6 | 15 | 19 | 6 | 21 | 20 | 12 |
| 4 | 3 | 8 | 10 | 11 | 10 | 15 | 22 | 6 | 21 | 22 | 4 |
| 4 | 5 | 4 | 10 | 15 | 12 | 16 | 8 | 10 | 21 | 24 | 6 |
| 4 | 11 | 12 | 10 | 16 | 8 | 16 | 10 | 8 | 22 | 15 | 6 |
| 5 | 4 | 4 | 10 | 17 | 16 | 16 | 17 | 4 | 22 | 20 | 10 |
| 5 | 6 | 8 | 11 | 4 | 12 | 16 | 18 | 6 | 22 | 21 | 4 |
| 5 | 9 | 10 | 11 | 10 | 10 | 17 | 10 | 16 | 22 | 23 | 8 |
| 6 | 2 | 10 | 11 | 12 | 12 | 17 | 16 | 4 | 23 | 14 | 8 |
| 6 | 5 | 8 | 11 | 14 | 8 | 17 | 19 | 4 | 23 | 22 | 8 |
| 6 | 8 | 4 | 12 | 3 | 8 | 18 | 7 | 4 | 23 | 24 | 4 |
| 7 | 8 | 6 | 12 | 11 | 12 | 18 | 16 | 6 | 24 | 13 | 8 |
| 7 | 18 | 4 | 12 | 13 | 6 | 18 | 20 | 8 | 24 | 21 | 6 |
| 8 | 6 | 4 | 13 | 12 | 6 | 19 | 15 | 6 | 24 | 23 | 4 |
| Incident 1 | Incident 2 | Incident 3 | Incident 4 | |
|---|---|---|---|---|
| Start node | 2 | 12 | 15 | 23 |
| Start time (min) | 100 | 140 | 230 | 185 |
| Space-time impact area (node, duration) | 2, (100–125) 6, (121–130) | 12, (140–165) 13, (160–165) | 15, (230–245) 22, (238–247) 21, (245–249) | 23, (185–212) 24, (200–225) 21, (222–225) |


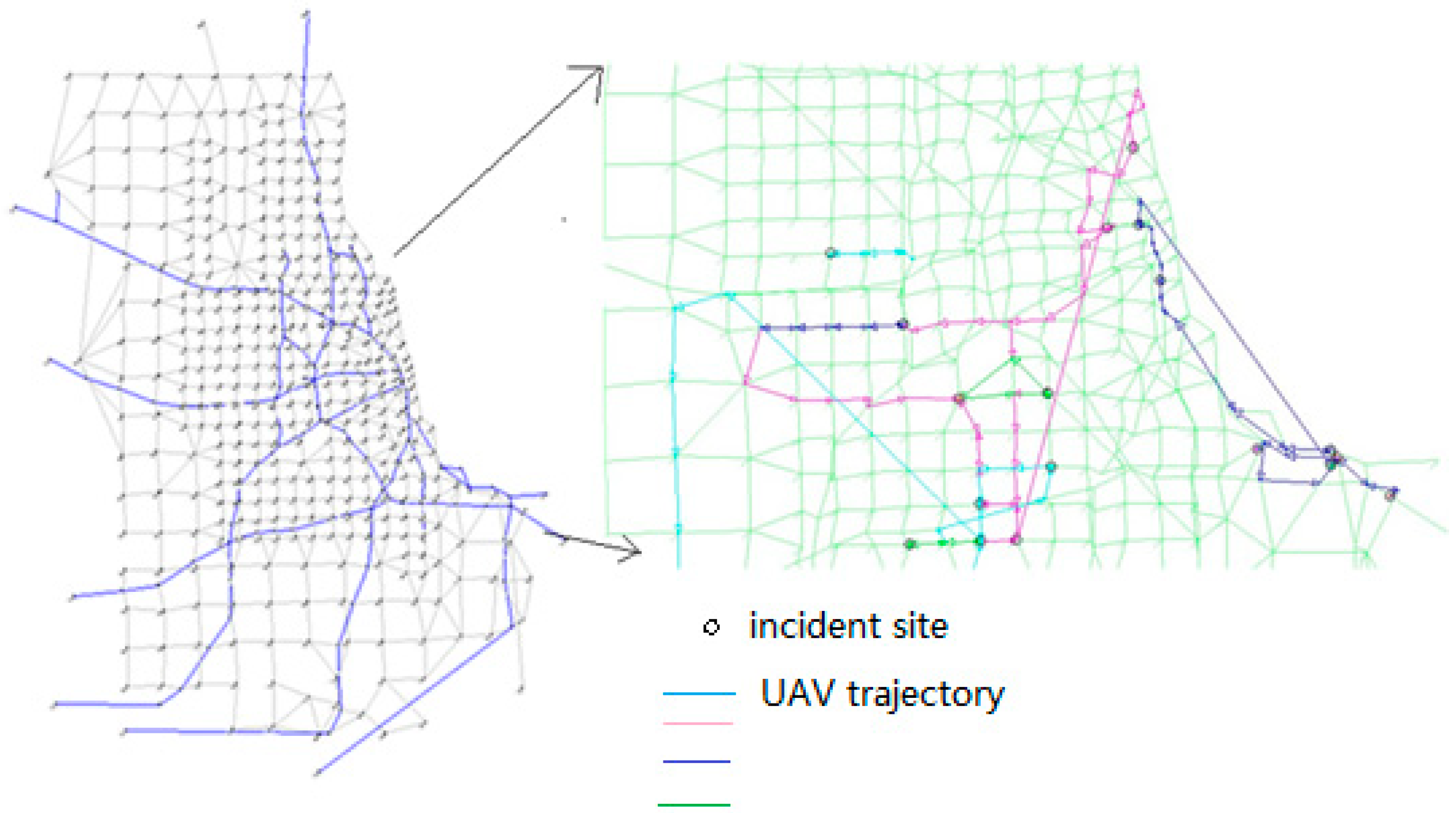
5.3. Chicago Networks




6. Conclusions and Future Research Plan
Acknowledgments
Author Contributions
Conflict of Interest
References
- Hagerstrand, T. What about people in regional science? Reg. Sci. Assoc. 1970, 24, 7–21. [Google Scholar] [CrossRef]
- Miller, H.J. Modelling accessibility using space-time prism concepts within geographical information systems. Int. J. Geogr. Inf. Syst. 1991, 5, 287–301. [Google Scholar] [CrossRef]
- Gentili, M.; Mirchandani, P.B. Locating sensors on traffic networks: Models, challenges and research opportunities. Transp. Res. Part C: Emerg. Technol. 2012, 24, 227–255. [Google Scholar] [CrossRef]
- Viti, F.; Rinaldi, M.; Corman, F.; Tampère, C.M.J. Assessing partial observability in network sensor location problems. Transp. Res. Part B: Methodol. 2014, 70, 65–89. [Google Scholar] [CrossRef]
- Yang, H.; Zhou, J. Optimal traffic counting locations for origin–destination matrix estimation. Transp. Res. Part B: Methodol. 1998, 32, 109–126. [Google Scholar] [CrossRef]
- Sherali, H.D.; Desai, J.; Rakha, H. A discrete optimization approach for locating automatic vehicle identification readers for the provision of roadway travel times. Transp. Res. Part B: Methodol. 2006, 40, 857–871. [Google Scholar] [CrossRef]
- Ban, X.; Herring, R.; Margulici, J.D.; Bayen, A. Optimal sensor placement for freeway travel time estimation. In Transportation and Traffic Theory 2009: Golden Jubilee; Lam, W.H.K., Wong, S.C., Lo, H.K., Eds.; Springer US: New York, NY, USA, 2009; pp. 697–721. [Google Scholar]
- Li, X.; Ouyang, Y. Reliable sensor deployment for network traffic surveillance. Transp. Res. Part B: Methodol. 2011, 45, 218–231. [Google Scholar] [CrossRef]
- Xing, T.; Zhou, X.; Taylor, J. Designing heterogeneous sensor networks for estimating and predicting path travel time dynamics: An information-theoretic modeling approach. Transp. Res. Part B: Methodol. 2013, 57, 66–90. [Google Scholar] [CrossRef]
- Zhou, X.; List, G.F. An information-theoretic sensor location model for traffic origin-destination demand estimation applications. Transp. Sci. 2010, 44, 254–273. [Google Scholar] [CrossRef]
- Berry, J.; Carr, R.; Hart, W.; Phillips, C. Scalable water network sensor placement via aggregation. In World Environmental and Water Resources Congress 2007; American Society of Civil Engineers: Tampa, FL, USA, 2007; pp. 1–11. [Google Scholar]
- Barfuss, S.L.; Jensen, A.; Clemens, S. Evaluation and Development of Unmanned Aircraft (UAV) for UDOT Needs; Utah Department of Transportation: Salt Lake City, UT, USA, 2012. [Google Scholar]
- Latchman, H.A.; Wong, T.; Shea, J.; McNair, J.; Fang, M.; Courage, K.; Bloomquist, D.; Li, I. Airborne Traffic Surveillance Systems: Proof of Concept Study for the Florida Department of Transportation; University of Florida, Florida Department of Transportation: Gainesville, FL, USA, 2005. [Google Scholar]
- Hart, W.; Gharaibeh, N. Use of micro unmanned aerial vehicles in roadside condition surveys. In Transportation and Development Institute Congress 2011; American Society of Civil Engineers: Chicago, IL, USA, 2011; pp. 80–92. [Google Scholar]
- Ryan, J.L.; Bailey, T.G.; Moore, J.T.; Carlton, W.B. Reactive Tabu search in unmanned aerial reconnaissance simulations. In Simulation Conference Proceedings, Washington, DC, USA, 1998; Volume 871, pp. 873–879.
- Hutchison, M.G. A method for Estimating Range Requirements of Tactical Reconnaissance UAVs. In Proceedings of the AIAA's 1st Technical Conference and Workshop on Unmanned Aerospace Vehicles, Virginia, VA, USA, 20–23 May 2002.
- Yan, Q.; Peng, Z.; Chang, Y. Unmanned aerial vehicle cruise route optimization model for sparse road network. Transportation Research Board of the National Academies, Washington, DC, USA, 2011; 432–445. [Google Scholar]
- Ousingsawat, J.; Mark, E.C. Establishing trajectories for multi-vehicle reconnaissance. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Providence, RI, USA, 16–19 August 2004.
- Tian, J.; Shen, L.; Zheng, Y. Genetic Algorithm Based Approach for Multi-Uav Cooperative Reconnaissance Mission Planning Problem. In Foundations of Intelligent Systems; Esposito, F., Raś, Z., Malerba, D., Semeraro, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; Volume 4203, pp. 101–110. [Google Scholar]
- Wang, Z.; Zhang, W.; Shi, J.; Han, Y. UAV route planning using multiobjective ant colony system. In Proceedings of the 2008 IEEE Conference Cybernetics and Intelligent Systems, Chengdu, China, 21–24 September 2008; pp. 797–800.
- Liu, X.; Peng, Z.; Zhang, L.; Li, L. Unmanned aerial vehicle route planning for traffic information collection. J. Transp. Syst. Eng. Inf. Technol. 2012, 12, 91–97. [Google Scholar] [CrossRef]
- Liu, X.; Peng, Z.; Chang, Y.; Zhang, L. Multi-objective evolutionary approach for uav cruise route planning to collect traffic information. J. Central South Univ. 2012, 19, 3614–3621. [Google Scholar] [CrossRef]
- Liu, X.; Chang, Y.; Wang, X. A UAV allocation method for traffic surveillance in sparse road network. J. Highw. Transp. Res. Dev. 2012, 29, 124–130. [Google Scholar] [CrossRef]
- Liu, X.; Guan, Z.; Song, Y.; Chen, D. An Optimization Model of UAV Route Planning for Road Segment Surveillance. J. Central South Univ. 2014, 21, 2501–2510. [Google Scholar] [CrossRef]
- Mersheeva, V.; Friedrich, G. Routing for continuous monitoring by multiple micro uavs in disaster scenarios. In Proceedings of the 20th European Conference on Artificial Intelligence (ECAI 2012), Montpellier, France, 27–31 August 2012; pp. 588–593.
- Sundar, K.; Rathinam, S. Route planning algorithms for unmanned aerial vehicles with refueling constraints. In Proceedings of the American Control Conference (ACC), Montréal, Canda, 27–29 June 2012; pp. 3266–3271.
- Ning, Z.; Yang, L.; Shoufeng, M.; Zhengbing, H. Mobile traffic sensor routing in dynamic transportation systems. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2273–2285. [Google Scholar]
- Kuijpers, B.; Othman, W. Modeling uncertainty of moving objects on road networks via space-time prisms. Int. J. Geogr. Inf. Sci. 2009, 23, 1095–1117. [Google Scholar]
- Meng, L.; Zhou, X. Simultaneous train rerouting and rescheduling on an N-track network: A model reformulation with network-based cumulative flow variables. Transp. Res. Part B: Methodol. 2014, 67, 208–234. [Google Scholar] [CrossRef]
- Zhou, X.; Taylor, J. DTALite: A queue-based mesoscopic traffic simulator for fast model evaluation and calibration. Cogent Eng. 2014, 1, 961345. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Jia, L.; Niu, S.; Zhang, F.; Tong, L.; Zhou, X. A Space-Time Network-Based Modeling Framework for Dynamic Unmanned Aerial Vehicle Routing in Traffic Incident Monitoring Applications. Sensors 2015, 15, 13874-13898. https://doi.org/10.3390/s150613874
Zhang J, Jia L, Niu S, Zhang F, Tong L, Zhou X. A Space-Time Network-Based Modeling Framework for Dynamic Unmanned Aerial Vehicle Routing in Traffic Incident Monitoring Applications. Sensors. 2015; 15(6):13874-13898. https://doi.org/10.3390/s150613874
Chicago/Turabian StyleZhang, Jisheng, Limin Jia, Shuyun Niu, Fan Zhang, Lu Tong, and Xuesong Zhou. 2015. "A Space-Time Network-Based Modeling Framework for Dynamic Unmanned Aerial Vehicle Routing in Traffic Incident Monitoring Applications" Sensors 15, no. 6: 13874-13898. https://doi.org/10.3390/s150613874
APA StyleZhang, J., Jia, L., Niu, S., Zhang, F., Tong, L., & Zhou, X. (2015). A Space-Time Network-Based Modeling Framework for Dynamic Unmanned Aerial Vehicle Routing in Traffic Incident Monitoring Applications. Sensors, 15(6), 13874-13898. https://doi.org/10.3390/s150613874