
An Autonomous Star Identification Algorithm Based on One-Dimensional Vector Pattern for Star Sensors

Abstract
:1. Introduction
2. Description of the One-Dimensional Vector Pattern
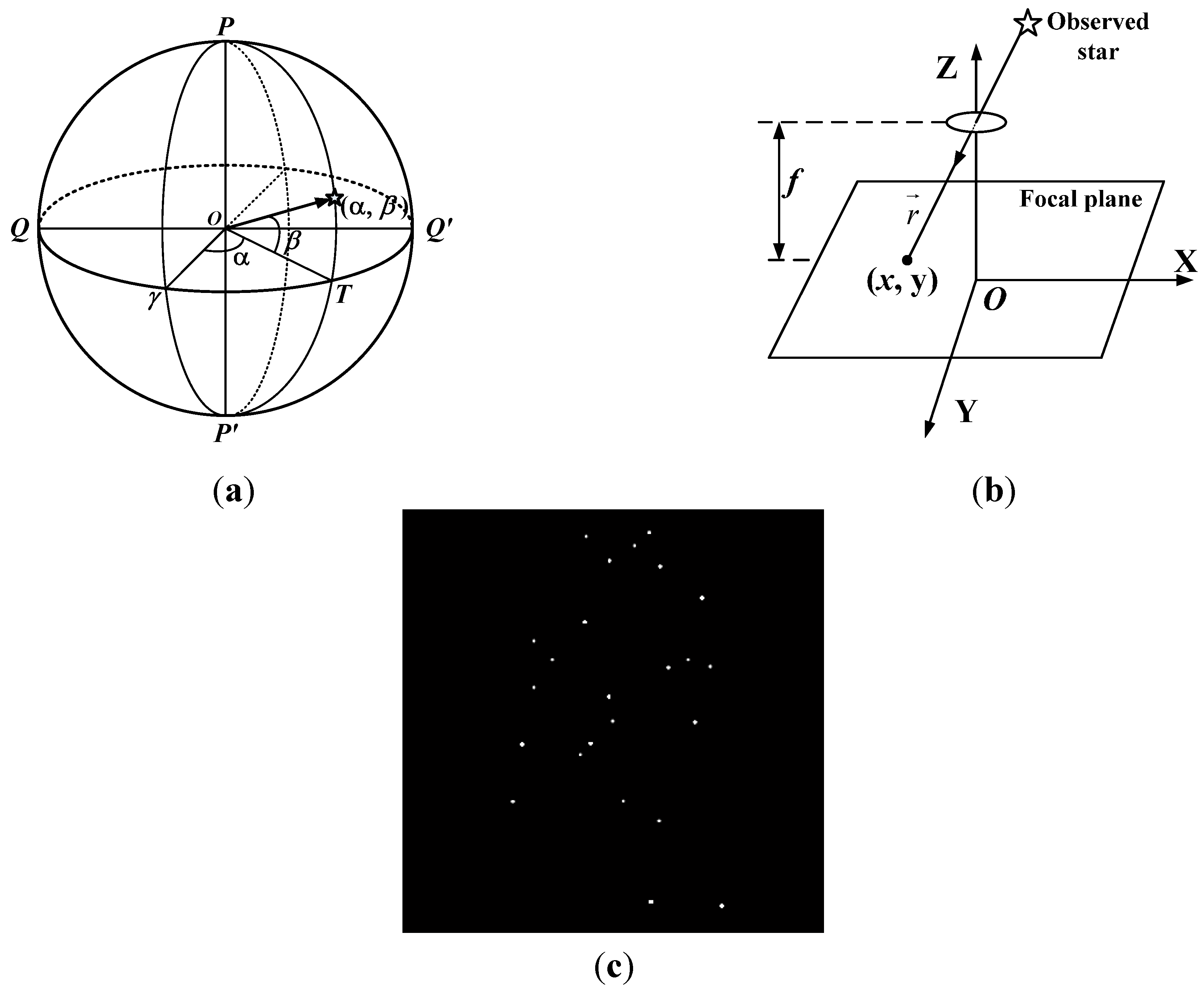
2.1. The Imaging Principle in Star Sensor

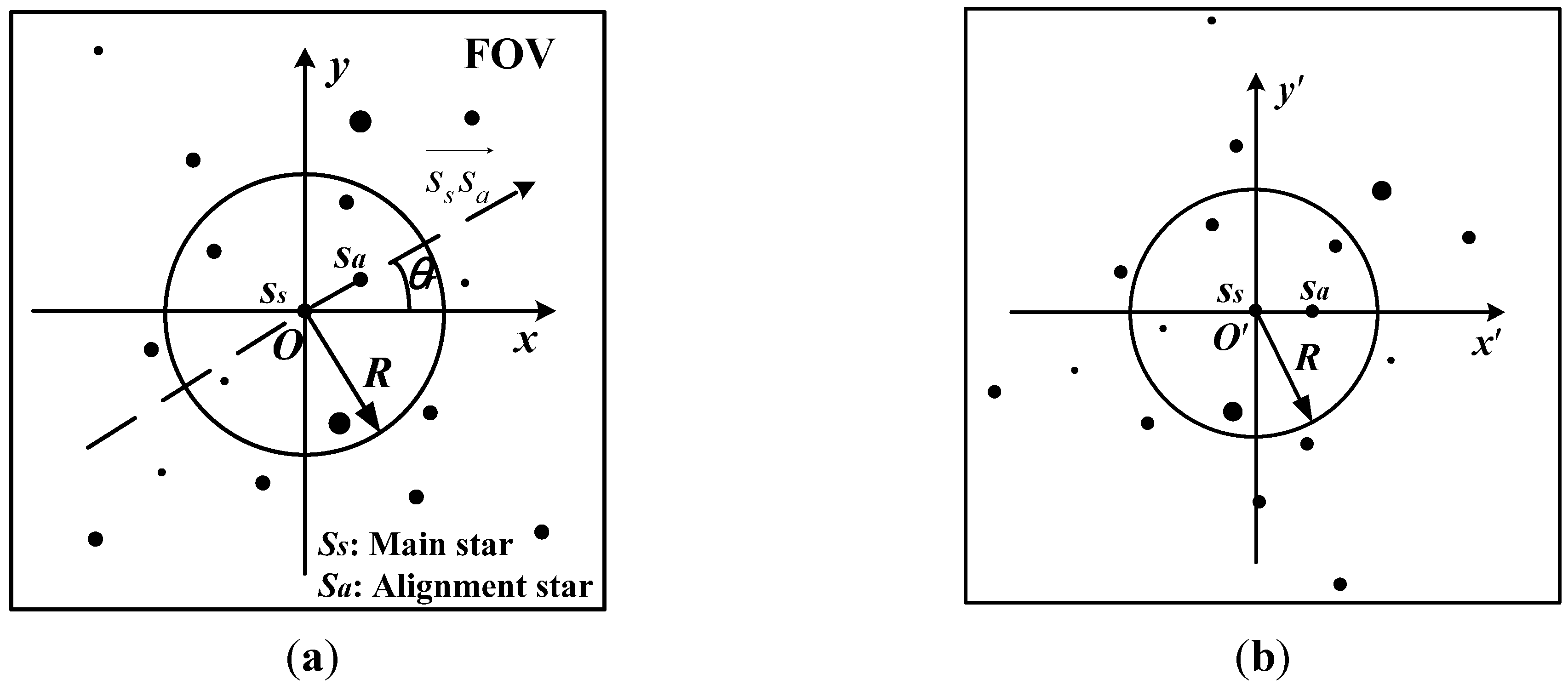
2.2. The One-Dimensional Vector Pattern

3. Generation of the Feature Vector and the Process of Star Identification
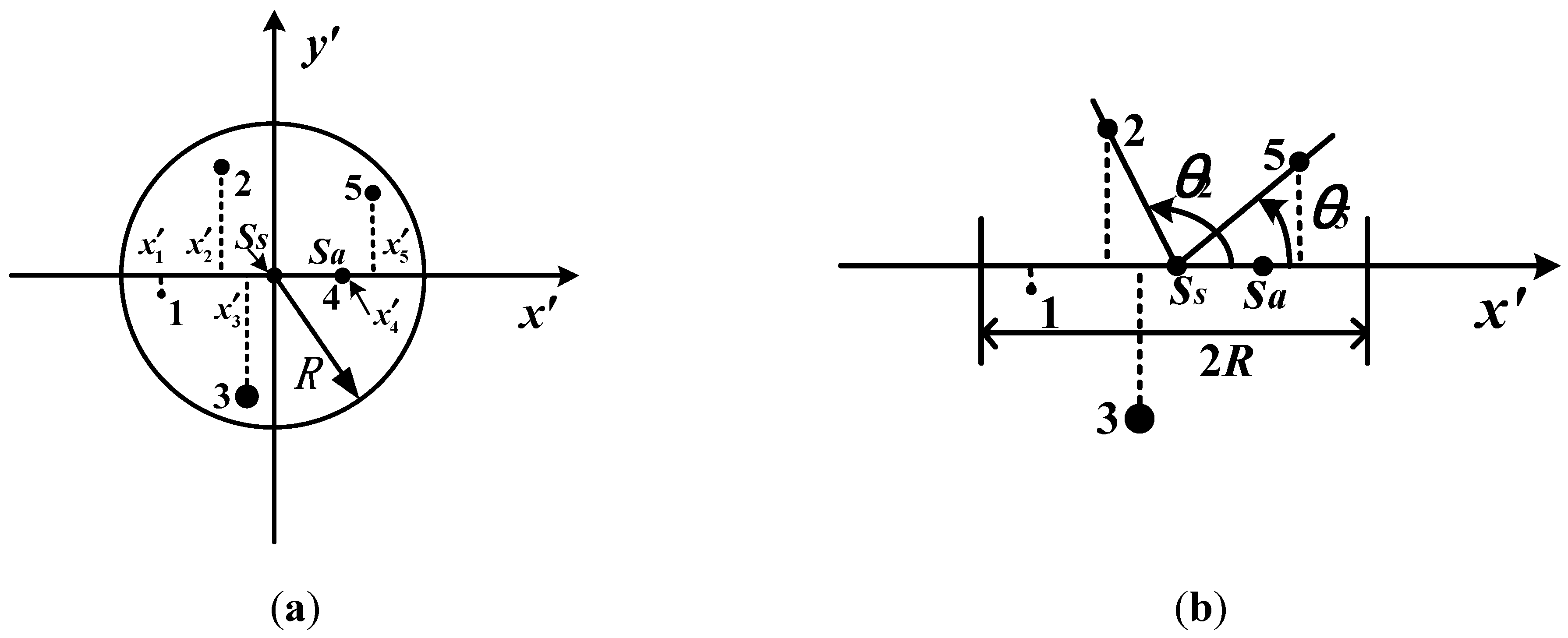
3.1. Generation of the Feature Vector

3.2. Process of Star Identification
4. Simulation Conditions
4.1. Parameter Setting for Star Sensor
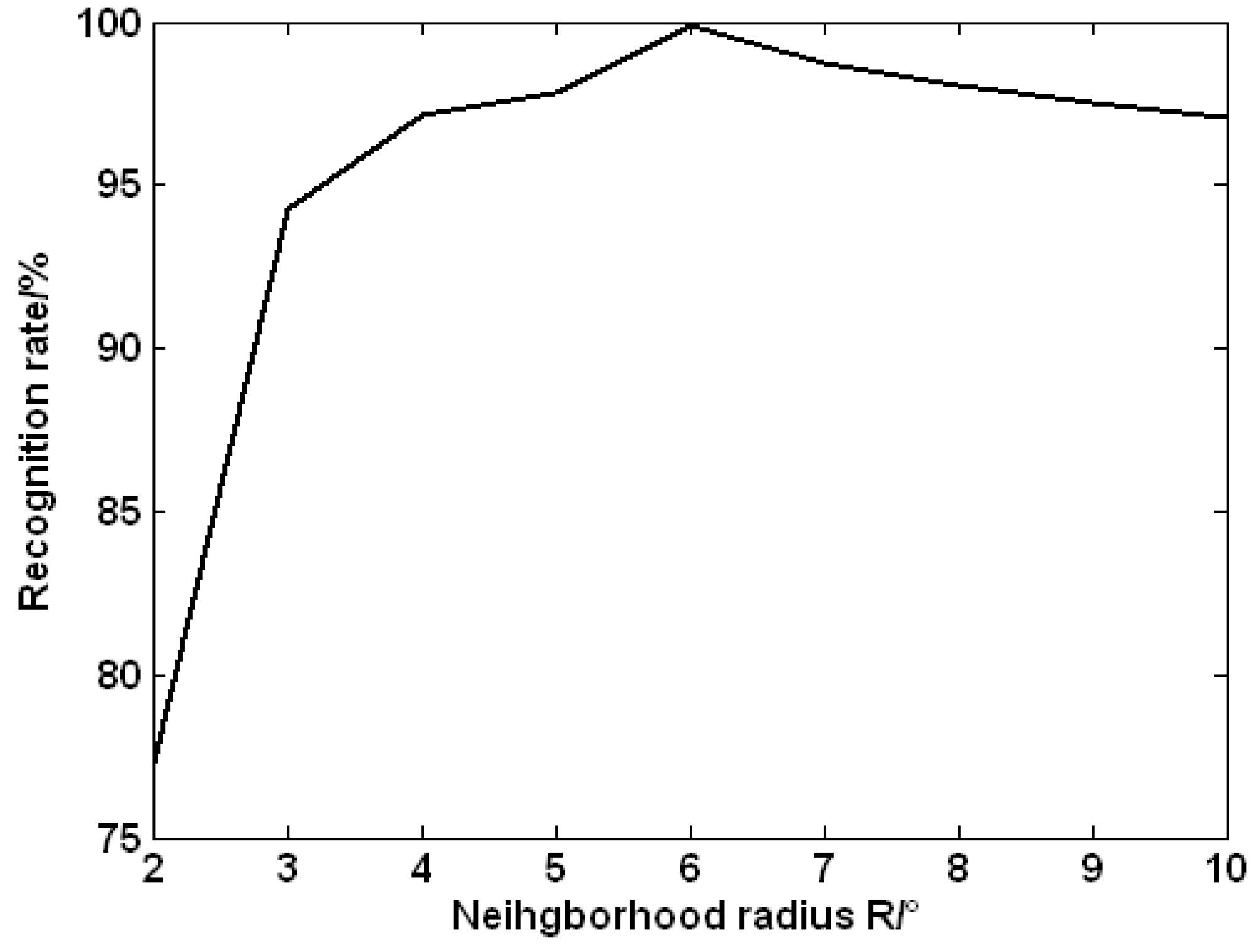
4.2. Selection of the Identification Parameters

5. Experiment Results and Analysis
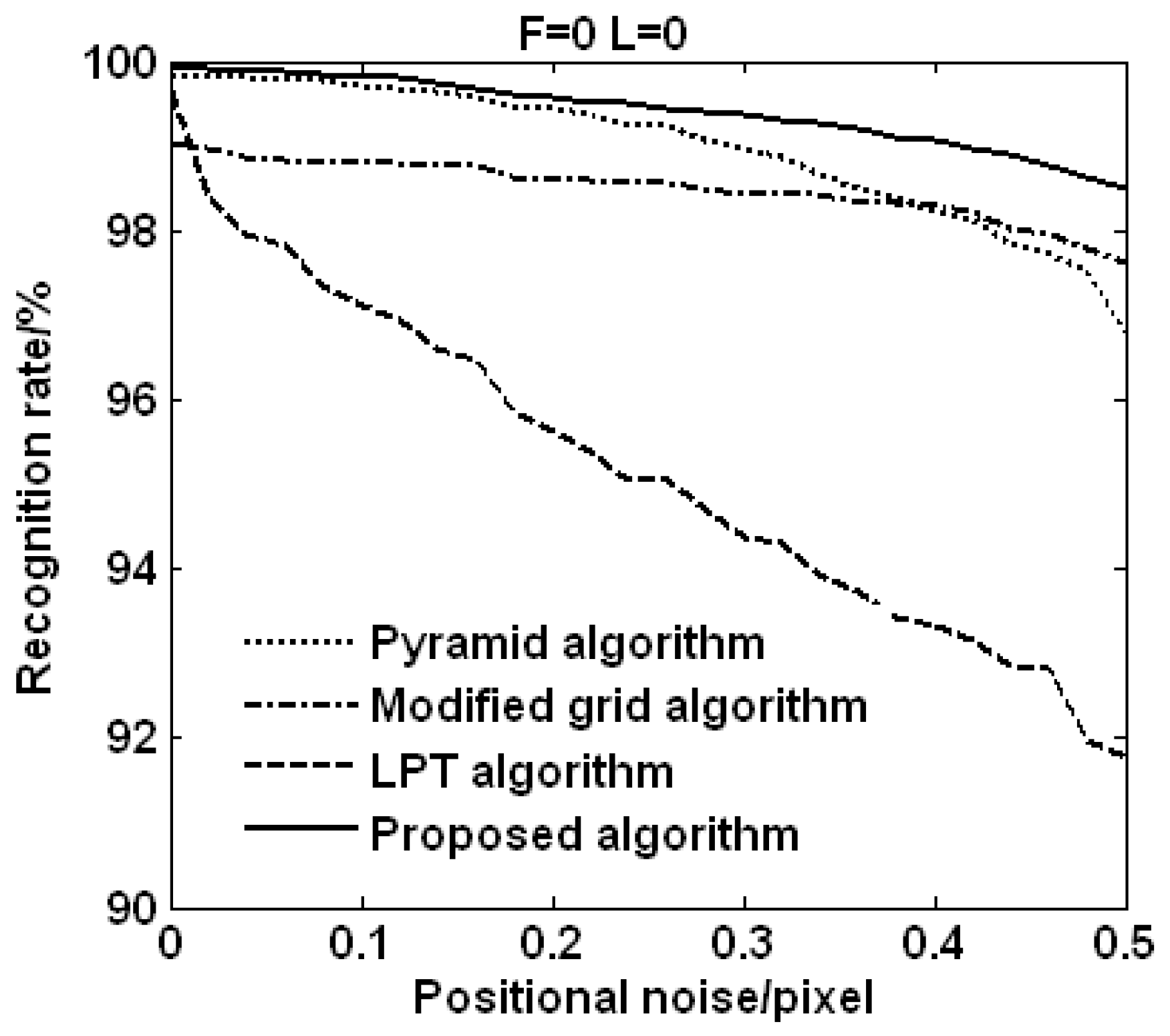
5.1. Performance of Different Algorithms under Positional Noise

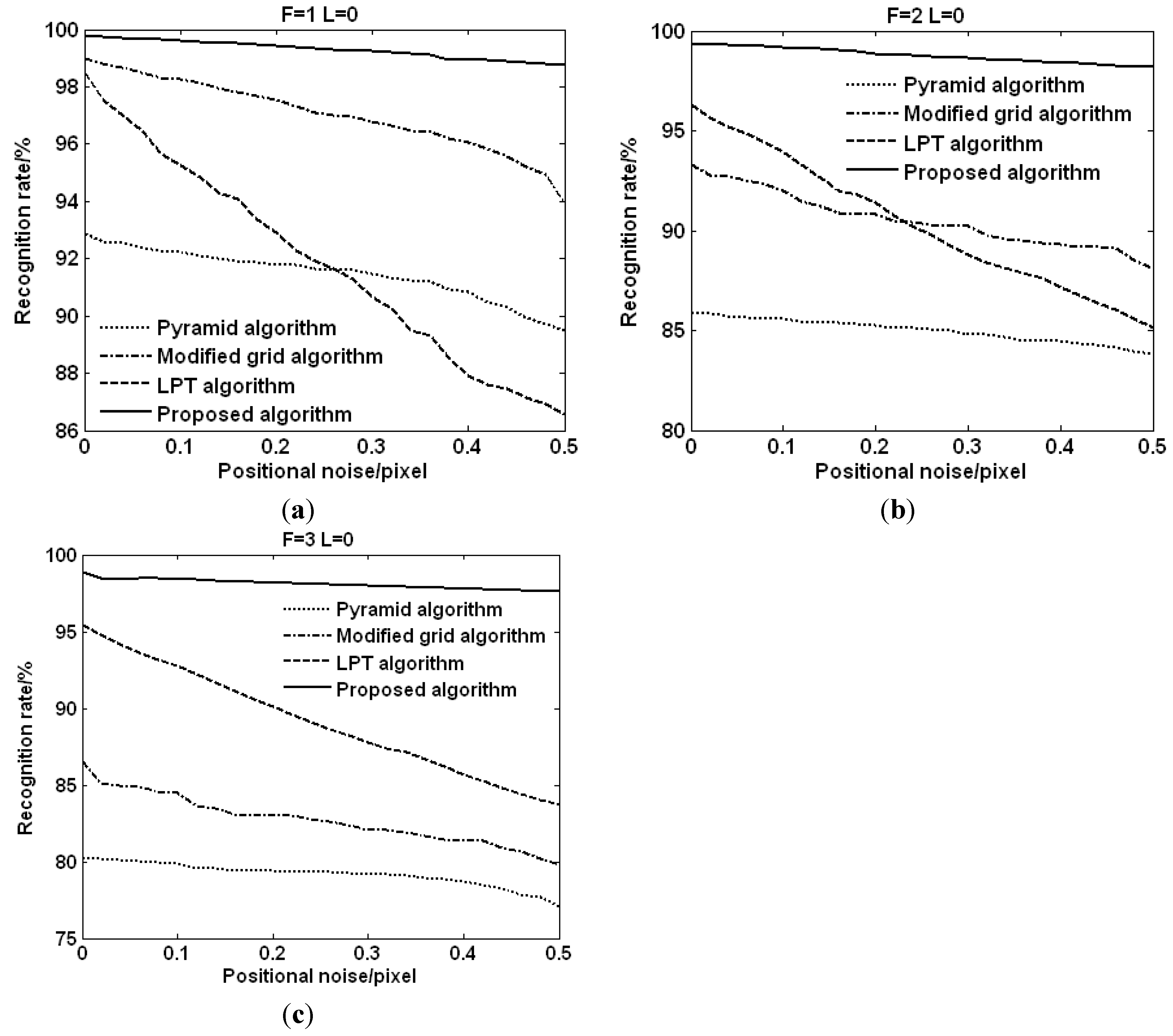
5.2. Performance of Different Algorithms under False Stars

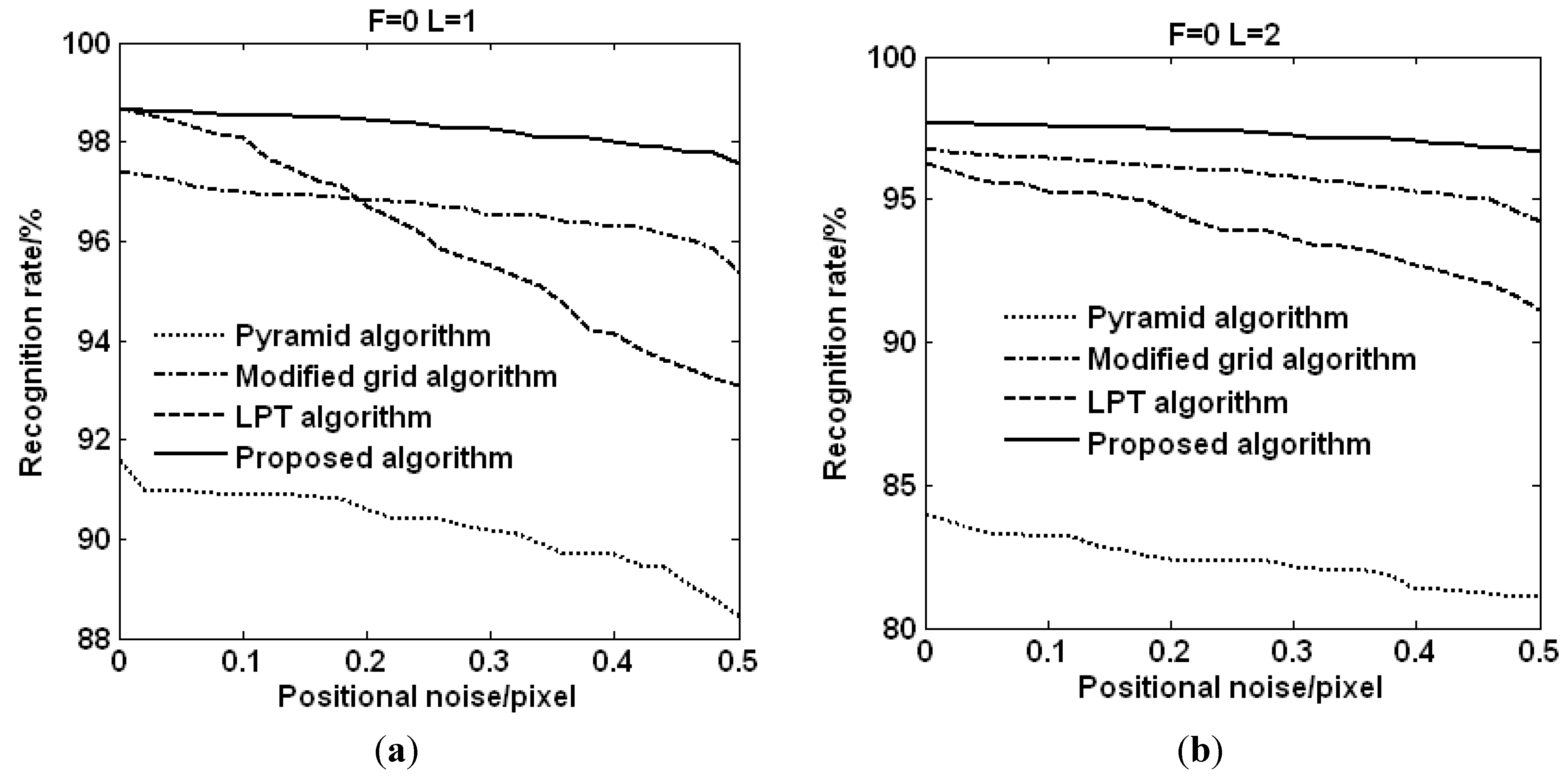
5.3. Performance of Different Algorithms under Lost Stars

5.4. Identification Time and Memory Usage

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Identification Algorithm | Max Time/s | Min Time/s | Average Time/s | Database Size |
|---|---|---|---|---|
| Pyramid | 0.0610 | 4.0061 × 10−4 | 0.0275 | 130.57 KB |
| M. Grid | 0.5886 | 0.0279 | 0.3946 | 7.38 MB |
| LPT | 0.0811 | 0.0718 | 0.0738 | 665.89 KB |
| Proposed algorithm | 0.0196 | 3.3496 × 10−4 | 0.0078 | 280.72 KB |
6. Conclusions
- (1)
- Compared with the 0–1 string in the modified grid algorithm, the one-dimensional vector pattern can fully express the space geometry information of the stars observed in FOV, which makes a great contribution to star identification.
- (2)
- The feature vector of the same observed star remains unchanged when the stellar image rotates, so the comparison of every two star pattern is simplified as the comparison of the two feature vectors, which can accelerate the speed of star identification.
- (3)
- The utility of the number of the non-zero value in the feature vector can narrow down the search scope of the matching pattern, which can make it possible to achieve the matching result quickly in the feature database, instead of searching the entire feature database.
- (4)
- Under the same conditions, the performance of the proposed algorithm is better than the other three star identification algorithms.
- (5)
- Compared with the other three star identification algorithms, the proposed algorithm is simple and easy to replicate.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Liebe, C.C. Accuracy performance of star trackers—A tutorial. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 587–599. [Google Scholar] [CrossRef]
- Liebe, C.C. Star trackers for attitude determination. IEEE Aerosp. Electron. Syst. Mag. 1995, 10, 10–16. [Google Scholar] [CrossRef]
- Tsai, J.; Hsiao, F.Y.; Li, Y.J.; Shen, J.-F. A quantum search algorithm for future spacecraft attitude determination. Acta Astronaut. 2011, 68, 1208–1218. [Google Scholar] [CrossRef]
- Spratling, B.B., IV; Mortari, D. A survey on star identification algorithms. Algorithms 2009, 2, 93–107. [Google Scholar] [CrossRef]
- Accardo, D.; Rufino, G. Brightness-independent start-up routine for star trackers. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 813–823. [Google Scholar] [CrossRef]
- Samaan, M.A.; Mortari, D.; Junkins, J.L. Recursive mode star identification algorithms. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1246–1254. [Google Scholar] [CrossRef]
- Mortari, D.; Junkins, J.L.; Samaan, M.A. Lost-in-space pyramid algorithm for robust star pattern recognition. In Advances in the Astronautical Sciences, Proceedings of the Annual AAS Rocky Mountain Guidance and Control Conference, Breckenridge, CO, USA, 31 January–4 February 2001; Volume 107.
- Mortari, D.; Samaan, M.A.; Bruccoleri, C.; Junkins, J.L. The pyramid star identification technique. Navig. J. Inst. Navig. 2004, 51, 171–183. [Google Scholar] [CrossRef]
- Wu, F.; Shen, W.M.; Zhou, J.K.; Chen, X.H. Design and simulation of a novel aps star tracker. In Proceedings of the 2008 International Conference on Optical Instruments and Technology: Optical Systems and Optoelectronic Instruments, Beijing, China, 16–19 November 2008; Volume 7156, p. 11.
- Scholl, M.S. Experimental demonstration of a star-field identification algorithm. Opt. Lett. 1993, 18, 402–404. [Google Scholar] [CrossRef] [PubMed]
- Scholl, M.S. Six-feature star-pattern identification algorithm. Appl. Opt. 1994, 33, 4459–4464. [Google Scholar] [CrossRef] [PubMed]
- Jiang, M.; Ye, Y.Z.; Yu, M.Y.; Wang, J.X.; Li, B.H. A Novel Star Pattern Recognition Algorithm for Star Sensor; IEEE: New York, NY, USA, 2007; pp. 2673–2677. [Google Scholar]
- Du, L.; Zhao, Y. An improved triangle star pattern recognition algorithm with high identification probability. In Proceedings of the International Symposium on Photoelectronic Detection and Imaging 2011: Advances in Infrared Imaging and Applications, Beijing, China, 24 May 2011; p. 819305.
- Zhang, W.; Qi, S.X.; Zhang, R.; Yang, L.L.; Sun, J.F.; Song, L.Q.; Tian, J.W. A local-sky star recognition algorithm based on rapid triangle pattern index for iccd images. In Proceedings of the International Symposium on Photoelectronic Detection and Imaging 2013: Infrared Imaging and Applications, Beijing, China, 25–27 June 2013; Volume 8907, p. 10.
- Zong, H.; Gao, X.Y.; Wang, B. Modification and implementation of a triangle star pattern recognition algorithm. In Proceedings of the 2013 32nd Chinese Control Conference (CCC), Xi’an, China, 26–28 July 2013; pp. 5182–5186.
- Pei, R.; Hou, Y.S.; Hao, Y.; Xie, Y.E. A star identification algorithm based on group-matching. In Proceedings of the 2013 International Conference on Mechatronic Sciences, Electric Engineering and Computer (MEC), Shenyang, China, 20–22 December 2013; pp. 1502–1505.
- Padgett, C.; Kreutz-Delgado, K. A grid algorithm for autonomous star identification. IEEE Trans. Aerosp. Electron. Syst. 1997, 33, 202–213. [Google Scholar] [CrossRef]
- Lee, H.; Oh, C.S.; Bang, H. Modified grid algorithm for star pattern identification by using star trackers. In Proceedings of the RAST 2003: Recent Advances in Space Technologies, Istanbul, Turkey, 20–22 November 2003; Ince, F., Onbasioglu, S., Eds.; IEEE: New York, NY, USA; pp. 385–391.
- Lee, H.; Bang, H. Star pattern identification technique by modified grid algorithm. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1112–1116. [Google Scholar]
- Na, M.; Zheng, D.N.; Jia, P.F. Modified grid algorithm for noisy all-sky autonomous star identification. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 516–522. [Google Scholar] [CrossRef]
- Yi, W.J.; Liu, H.B.; Yang, J.K.; Jia, H.; Yang, L.X. Three-dimensional grid algorithm for all-sky autonomous star identification. In Proceedings of the 6th International Symposium on Advanced Optical Manufacturing and Testing Technologies: Optical System Technologies for Manufacturing and Testing, Xiamen, China, 26 April 2012; p. 84207.
- Hong, J.; Dickerson, J.A. Neural-network-based autonomous star identification algorithm. J. Guid. Control Dyn. 2000, 23, 728–735. [Google Scholar] [CrossRef]
- Kim, K.T.; Bang, H. Reliable star pattern identification technique by using neural networks. J. Astronaut. Sci. 2004, 52, 239–249. [Google Scholar]
- Yang, J.; Wang, L. An improved star identification method based on neural network. In Proceedings of the IEEE 10th International Conference on Industrial Informatics, Beijing, China, 25–27 July 2012; pp. 118–123.
- McClintock, S.; Lunney, T.; Hashim, A. A genetic algorithm environment for star pattern recognition. J. Intell. Fuzzy Syst. 1998, 6, 3–16. [Google Scholar]
- Seisie-Amoasi, E.; Williams, B.G.; Schoen, M.P.; Asme. Optimization of a star pattern recognition algorithm for attitude determination using a multi-objective genetic algorithm. In Proceedings of the ASME 2005 International Mechanical Engineering Congress and Exposition, Orlando, FL, USA, 5–11 November 2005; pp. 913–920.
- Padgett, C.; KreutzDelgado, K.; Udomkesmalee, S. Evaluation of star identification techniques. J. Guid. Control Dyn. 1997, 20, 259–267. [Google Scholar] [CrossRef]
- Wei, X.G.; Zhang, G.J.; Jiang, J. Star identification algorithm based on log-polar transform. J. Aerosp. Comput. Inf. Commun. 2009, 6, 483–490. [Google Scholar] [CrossRef]
- Juang, J.N.; Wang, Y.C. Further studies on singular value method for star pattern recognition and attitude determination. J. Astronaut. Sci. 2012, 59, 379–389. [Google Scholar] [CrossRef]
- Yoon, H.; Paek, S.W.; Lim, Y.; Lee, B.H.; Lee, H. New star pattern identification with vector pattern matching for attitude determination. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1108–1118. [Google Scholar] [CrossRef]
- Yoon, Y. Autonomous star identification using pattern code. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2065–2072. [Google Scholar] [CrossRef]
- Zhao, L.; Hou, Y.; Hao, Y.; Wu, X. A novel star identification algorithm using pattern vector. In Proceedings of the 2014 33rd Chinese Control Conference (CCC), Nanjing, China, 28–30 July 2014; pp. 703–706.
- Hang, Y.; Xin, S.; Ye, Y. Study on boundaries of eigenvalues in svd method for autonomous star identification. In Proceedings of the 2014 6th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 26–27 August 2014; pp. 304–308.
- Ji, F.L.; Jiang, J.; Wei, X.G. Unified redundant patterns for star identification. In Proceedings of IEEE International Conference on Imaging Systems and Techniques (IST), Beijing, China, 22–23 October 2013; pp. 228–233.
- Quan, W.; Xu, L.; Fang, J. A new star identification algorithm based on improved hausdorff distance for star sensors. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2101–2109. [Google Scholar]
- Pham, M.D.; Low, K.-S.; Shoushun, C. An autonomous star recognition algorithm with optimized database. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1467–1475. [Google Scholar] [CrossRef]
- Luo, L.Y.; Xu, L.P.; Zhang, H.; Sun, J.R. Improved autonomous star identification algorithm. Chin. Phys. B 2015, 24, 064202. [Google Scholar] [CrossRef]
- Zhang, P.; Zhao, Q.; Liu, J.; Liu, N. A brightness-referenced star identification algorithm for aps star trackers. Sensors 2014, 14, 18498–18514. [Google Scholar] [CrossRef] [PubMed]
- Reibel, Y.; Jung, M.; Bouhifd, M.; Cunin, B.; Draman, C. CCD or CMOS camera noise characterisation. Eur. Phys. J. Appl. Phys. 2003, 21, 75–80. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, L.; Xu, L.; Zhang, H. An Autonomous Star Identification Algorithm Based on One-Dimensional Vector Pattern for Star Sensors. Sensors 2015, 15, 16412-16429. https://doi.org/10.3390/s150716412
Luo L, Xu L, Zhang H. An Autonomous Star Identification Algorithm Based on One-Dimensional Vector Pattern for Star Sensors. Sensors. 2015; 15(7):16412-16429. https://doi.org/10.3390/s150716412
Chicago/Turabian StyleLuo, Liyan, Luping Xu, and Hua Zhang. 2015. "An Autonomous Star Identification Algorithm Based on One-Dimensional Vector Pattern for Star Sensors" Sensors 15, no. 7: 16412-16429. https://doi.org/10.3390/s150716412