1. Introduction
Wireless sensor networks (WSNs) have received considerable attention, and have been applied to a large number of scenarios in recent years [
1]. With the growth in network scale, interference management has become one of the major challenges in WSNs where multiple users often share some common resources simultaneously and high data rates are often demanded. A large amount of research has focused on interference management techniques in order to increase the sum rate of the system [
2,
3,
4,
5]. One recent interesting interference management scheme that can approach the channel capacity is interference alignment (IA), which was firstly studied by Maddah-Ali
et al. [
6] as well as Jafar and Shamai [
7] for the multiple-input and multiple-output (MIMO) X channel. Subsequently, Cadambe and Jafar [
8] proved that the throughput of the system varies linearly with the number of users in high signal-to-noise ratio (SNR) regimes by employing IA. In addition, the degrees of freedom (DoFs), which serve as one key measure of the channel capacity, were studied by Lee
et al. [
9] in the case of the MIMO Y channel and by Cadambe and Jafar [
10] in the case of relay networks. Thanks to its bright prospects IA has been extended to use in many scenarios such as OFDM systems [
11], femtocell networks [
12], and cognitive networks [
13,
14]. In particular, Wu
et al. [
15] have leveraged the IA technique to mitigate the strong interference in large scale WSNs. In heterogeneous networks, Sharma
et al. [
16] have proposed a novel spectral coexistence mechanism which takes advantage of the IA technique.
Essentially, achieving IA is to design proper transmitting precoding matrices
V to align the desired signal and interference to different signal subspaces, and to design proper receiving decoding matrices
U to eliminate the interference at each receiver [
17]. Tresch
et al. [
18] have developed closed-form solutions to IA for the MIMO interference channel with
M + 1 users, one degree of freedom,
M transmitting antennas, and
M receiving antennas. However, the closed-form solutions to IA remain unknown except for some special situations [
19]. Peters and Heath [
20] have shown that it is difficult to formulate the closed-form solutions of
V and
U in the situation of more than three users. In addition, Razaviyayn
et al. [
21] have also shown that searching the optimal
V and
U is a nonconvex problem. Ma
et al. [
22] have performed a deep analysis on the computational complexity of interference alignment, and shown that the problem becomes NP-hard when the number of antennas at each node is larger than two. Therefore, many researchers [
20,
21,
22,
23,
24,
25,
26] have focused on numerical methods to find the suboptimal
V and
U. Gomadam
et al. [
23] have leveraged the channel reciprocity and proposed the alternating minimization interference leakage (AMIL) and Max-SINR algorithms, which only require local channel state information (CSI). It has been shown by Xu
et al. [
27] that the AMIL and Max-SINR algorithms show close multiplexing gains in high SNR regimes and the former approach has lower complexity than the latter one. A similar alternating minimization IA algorithm has been proposed in [
20] without assuming the network reciprocity. Shen
et al. [
24] have developed the minimum mean square error (MMSE) IA algorithm for the case of imperfect CSI. A sequential antenna switch algorithm was proposed in [
28], in which the quality of service of the IA system was considered.
Among these methods, the AMIL algorithm can suppress the interference leakage to a low level and thus can achieve high throughput in high SNR regimes where the sum rate of the system is determined by interference instead of noise. However, it might take a large number of iterations as well as long computational time in the case of large numbers of users and antennas. Furthermore, for the reason that CSI is time-variable, the practical IA system has limited computational time, which will certainly become the bottleneck of the implementation of AMIL algorithm when there are plenty of users and antennas. In this paper, we investigate the properties of the AMIL algorithm, and discover that the difference between the consecutive iteration results of the AMIL algorithm will approximately point to the convergence solution when the precoding and decoding matrices obtained from the intermediate iterations are sufficiently close to their convergence values. Based on this property, we propose a rapidly convergent low-complexity IA algorithm, i.e., directional quartic optimal (DQO) algorithm. It leverages a line search (LS) optimization method, which iteratively generates searching directions and optimal step sizes. The searching direction is obtained by subtracting the consecutive results of AMIL algorithm, and the optimal step size is calculated by solving a quartic optimization problem.
The rest of the paper is organized as follows: in
Section 2, we describe the system model. The properties of the AMIL algorithm are studied in
Section 3, which will serve as the foundation of the algorithm proposed later. In
Section 4, the DQO algorithm is proposed, and the corresponding procedure, optimal step size calculation, and complexity analysis are provided. Numerical results to evaluate the proposed algorithm are presented and discussed in
Section 5. Finally, the paper is concluded in
Section 6. As far as the notation used in the paper is concerned, we employ (
M ×
N,
d)
K to represent a
K-user MIMO interference channel where each user wishes to transmit
d data streams with
M transmitting antennas and
N receiving antennas. We use C, R, C
M×N,
I, and CN(μ, σ
2) to represent the complex domain, the real domain, the
M ×
N complex matrix, the identity matrix, and the complex Gaussian distribution with mean μ and variance σ
2, respectively. Re{
a} denotes the real part of scalar
a.
AT,
A*,
AH, ||
A||, Tr[
A] and
A*(l) mean the transpose, the conjugate, the conjugate transpose, the Frobenius norm, the trace and the
l-th column of matrix
A, respectively. eig
l[
A] stands for the eigenvector associated with the
l-th smallest eigenvalue of matrix
A. We employ
Ai to represent the value of
A at the
i-th iterations.
diag(
a1,
a2, ...,
am) represents a diagonal matrix with its diagonal elements equal to
a1,
a2, …,
am.
2. System Model
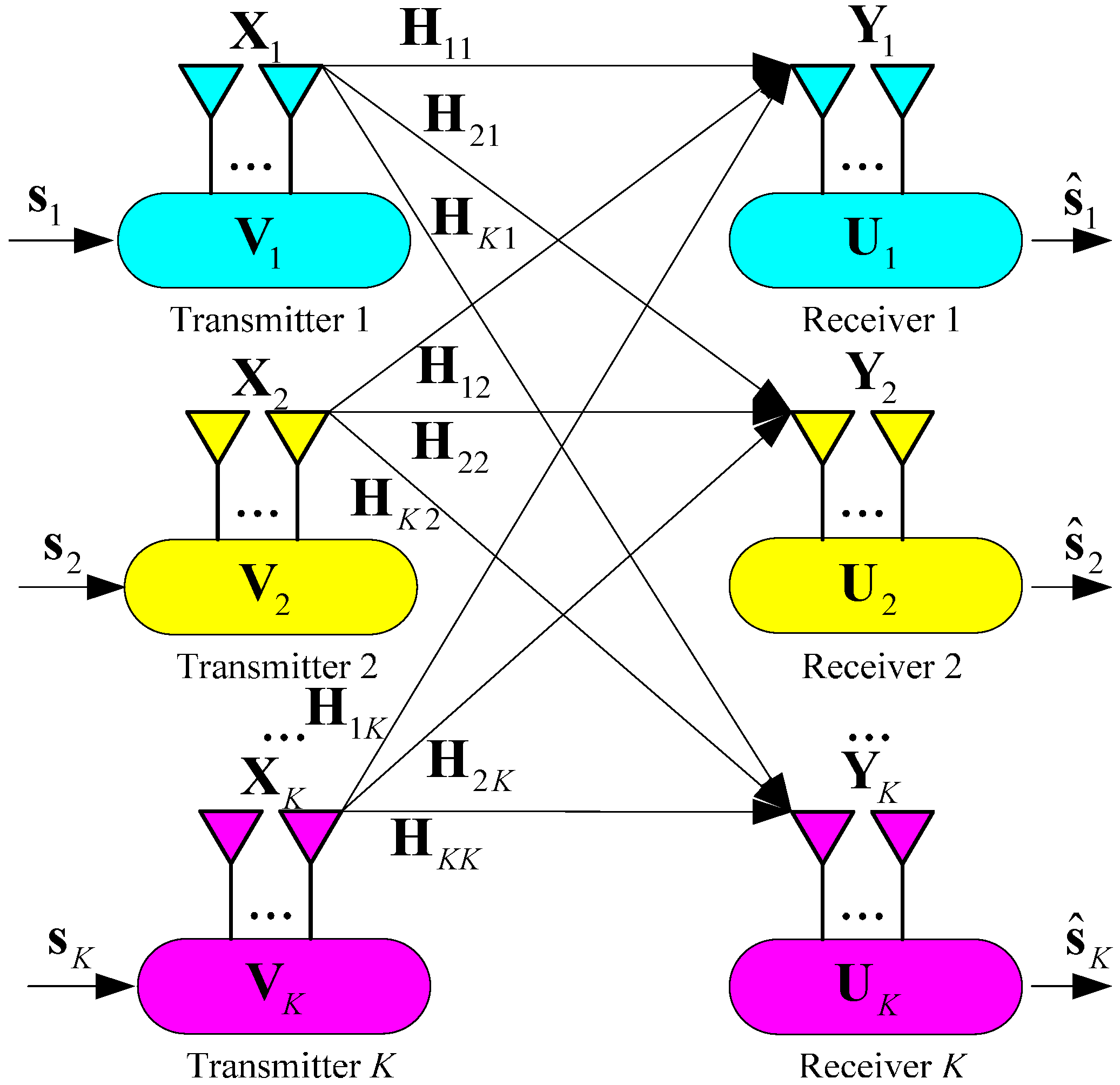
In this paper, the (
M ×
N,
d)
K MIMO interference channel is considered, and is depicted in
Figure 1. The received signal of the
k-th user can be represented as [
23]:
where
sk ∈ C
d×1,
Vk ∈ C
M×d, and
Yk ∈ C
N×1 denote the data vector, the precoding matrix, and the received signal vector of the
k-th user, respectively;
nk ∈ C
N×1 represents the noise vector with distribution of CN(0, σ
2) for each element;
Hkl ∈ C
N×M represents the channel matrix from transmitter
l to receiver
k. In the network we considered, CSI is obtained through CSI feedback, which serves as one critical technique in IA. A large number of researchers such as Ayach [
29], Cho [
30], and Zhang [
31] have focused on the CSI feedback strategy. Since we mainly focus on designing the precoding and decoding matrices, further investigation on CSI feedback is beyond the scope of the paper and an accurate global CSI is assumed to be available at each node throughout this paper.
Figure 1.
System model of the K-user MIMO interference channel.
Figure 1.
System model of the K-user MIMO interference channel.
The
k-th user’s covariance matrices of the forward and reciprocal networks are respectively given by:
where
Pl and
denote the transmitting power of the
l-th user in the forward and the reciprocal networks, respectively. Then the interference leakage at receiver
k can be calculated as:
where
Uk ∈ C
N×d is the decoding matrix at receiver
k. The total interference leakage is defined as the sum of the leakage at each receiver,
i.e.,:
Then the minimal interference leakage problem is to design proper transmitting precoding matrices
V and receiving decoding matrices
U to minimize Equation (5) under the following constraints:
The former constraint guarantees the feasibility of the desired signal reconstruction and the later one ensures the uniqueness of the IA solution [
17].
3. Properties of AMIL Algorithm
The AMIL algorithm, whose procedure is summarized in Algorithm 1, was proposed by Gomadam
et al. [
23] to find the IA solution by exploiting the channel reciprocity. In this section, we investigate the properties of the AMIL algorithm, and show that the difference of the consecutive iteration results of AMIL algorithm will approximately point to the convergence solution when the precoding and decoding matrices obtained from the intermediate iterations are sufficiently close to their convergence values. This interesting property will serve as the foundation of the algorithm proposed later.
| Algorithm 1 AMIL Algorithm |
Initialize Lth, Imax, and , with (k = 1, 2,…, K). i = 0. Repeat i = i + 1 (VU-step):Calculate according to Equation (2). Update so that (UV-step):Calculate according to Equation (3). Update so that Calculate the interference leakage L according to Equation (5). Until L < Lth or i > Imax.
|
As shown in Algorithm 1, the AMIL algorithm calculates the optimal decoding matrices U by fixing V in the forward channel, and computes the optimal V by fixing U in the reciprocal channel. It can monotonously suppress the interference leakage, and has been proved to converge to a local minimum. Although the convergence point is not guaranteed to be the optimal IA solution, it has been verified numerically that in many cases AMIL algorithm can achieve a low interference leakage level after sufficient iterations. Therefore, in high SNR regimes, where the sum rate is limited by interference rather than noise, the AMIL algorithm serves as a good method to increase the sum rate. In addition, the procedure of alternating minimization is very effective, and is often employed by many other algorithms. In spite of this, the iterations as well as time required by AMIL algorithm to reach a certain level of interference leakage increase dramatically with the number of users and antennas. Therefore, the properties of AMIL algorithm are studied in order to figure out a way to increase the convergence rate and thus to reduce its complexity as well as the required computational time.
Throughout this paper,
∈ C
M×d and
∈ C
N×d are employed to represent the
k-th user’s precoding and decoding matrices obtained from the
i-th iteration, respectively. The convergence value of
and
are defined as
and
, respectively. Define
∈ C
M×d as the deviation from
to
, and
∈ C
N×d as the deviation from
to
so that:
Define
,
,
∈ C
MdK×1 and
,
,
∈ C
NdK×1 as:
From Equations (8) and (9), it can be obtained that:
The investigation begins with the linear transformation property of AMIL algorithm as follows:
Theorem 1. If AMIL algorithm can converge to a point where the interference leakage is very small, there exist fixed linear transformations TV and TU, which do not change with iterations. When and are sufficiently close to and , respectively, the deviations of the (i + 1)-th iteration can be approximated as follows:
Proof of Theorem 1. In the situation when AMIL algorithm converges to a point where the interference leakage is very small, which is easy to achieve for AMIL algorithm, we have:
Define the interference covariance matrices at the convergence point as:
Assume that the
l-th smallest eigenvalue and the associated eigenvector of
are
and
, respectively. Similarly for
, we have
and
. From the procedure of AMIL algorithm,
and
should be the eigenvectors corresponding to the
d smallest eigenvalues of
and
, respectively. Therefore,
and
can be respectively given by:
At the (
i + 1)-th iteration, the VU-step of AMIL algorithm is performed on the precoding matrices
and covariance matrix at the (
i + 1)-th iteration can be expressed as:
where
is given by:
When
and
are sufficiently close to
and
respectively, the deviation
is very small. Therefore, the high order term
can be ignored, and Equation (21) can be simplified as:
According to the AMIL algorithm,
should be the eigenvector corresponding to the
d smallest eigenvalues of
. From Equations (19) and (20), using the Eigenvalue Perturbation Theory, the
l-th column of
can be approximated by:
where
is given by:
Substitute Equation (22) into (24), and
can be rewritten as:
From Equation (15), the terms
in Equation (25) is approximately zero and thus can be omitted. Therefore, Equation (25) can be simplified as:
From Equation (26), it can be seen that
is approximately the linear combination of the elements of
, and the coefficients of the combination are corresponding to
,
,
,
and
, which are fixed and do not vary with iterations
i. Hence there exists a fixed matrix
TVU ∈ C
NKd × MKd which does not change with iterations, so that:
Similarly for the UV-step, there exists a fixed matrix
TUV ∈ C
MKd × NKd which does not change with iterations, so that:
From Equations (27) and (28), we have:
where:
It can be seen that TV and TU determine the properties of AMIL algorithm when the current point is sufficiently close to its convergence value. As the analytical forms of TV and TU are extremely complex, the features of these two transformations are investigated by simulation and one interesting property observed is given as follows:
Property 1. In the case of (M × M, d)K channel, there exist two nonsingular matrices PV and PU, so that TV and TU can be expressed as:
where Λ = diag(κ1, κ2,…, κMKd) with κ1 > κ2 ... > κr and κr + 1 = κr + 2 = ... = κMKd = 0 (1 < r < KMd). Based on the properties above, we further study the situation when consecutive applications of TV and TU are exerted on the deviation, and come to the following theorem.
Theorem 2. In the (M × M, d)K channel, if AMIL algorithm can converge to a point where the interference leakage is very small, the convergence solutions and (k = 1, 2, ..., K) can be approximated by the following Equations (35) and (36), when and are sufficiently close to and , respectively :
Proof of Theorem 2. At the (
i +
i1)-th iteration, from Equations (29), (30), (33) and (34), we have:
Define
ek,
gk ∈ C
MKd×1 and
fk,
sk ∈ C so that:
Thus Equations (37) and (38) can be written as:
According to Property 1, when
i1 is large enough, it can be obtained that:
Therefore, Equations (43) and (44) can be approximated by:
At the (
i +
i1 + 1)-th iteration, it can be obtained that:
From Equations (11), (12), (48) and (49), we have:
Define
t =
κ1/(1 −
κ1) ∈ R and replace
i +
i1 + 1 with
i, it can be obtained that:
Substituting Equations (10) into Equations (52) and (53), then Equations (35) and (36) can be obtained. Therefore the difference between the consecutive iteration results of AMIL algorithm, i.e., and will approximately point to their convergence values and, when and are sufficiently close to and , respectively.
Theorem 2 provides an enlightenment to reach the convergence point more rapidly. Instead of going along the circuitous route of VU-step and UV-step of AMIL algorithm, we can approach the destination more directly by searching along the new direction, i.e., and .This interesting discovery inspires us to propose the rapid convergent IA algorithm which will be shown in the next section.
4. Directional Quartic Optimal Algorithm
The traditional AMIL algorithm suffers from high complexity when there are plenty of users and antennas. The large number of iterations and long computational time required by the AMIL algorithm limit its application to practical IA systems where the CSI is always changing. Therefore, a high efficiency algorithm is needed to reduce the computational cost. In this section, we focus on a rapid convergent low-complexity IA approach, and propose the DQO algorithm. As shown in
Section 3, the direction attained from the difference of the consecutive iteration results of the AMIL algorithm serves as a good searching direction, through which we can go to the convergence point almost directly. In addition, the optimal step size can be calculated by solving a quartic optimization problem. In this section, the details of the proposed algorithm are provided, and the associated computational complexity is analyzed.
4.1. The Procedure of DQO Algorithm
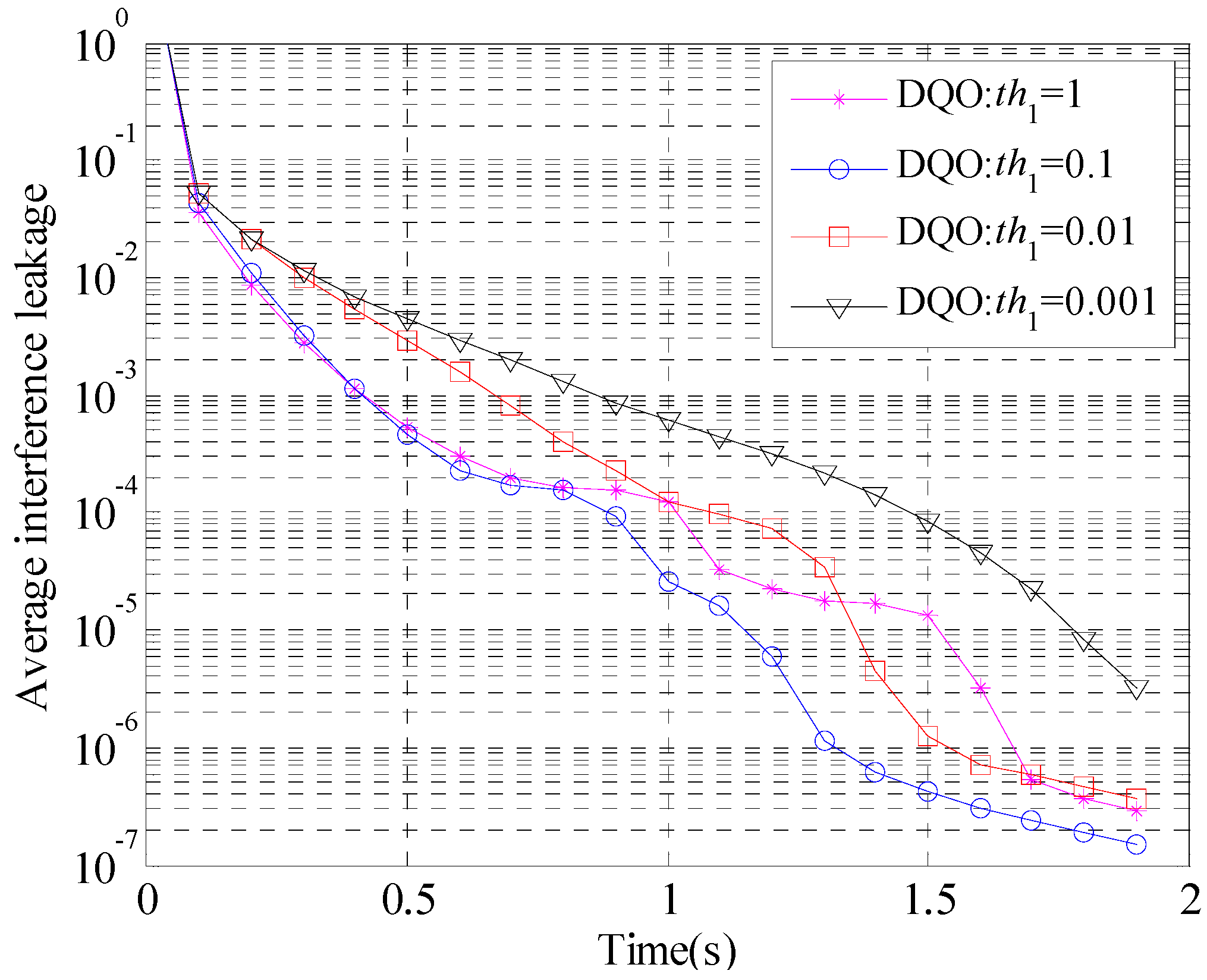
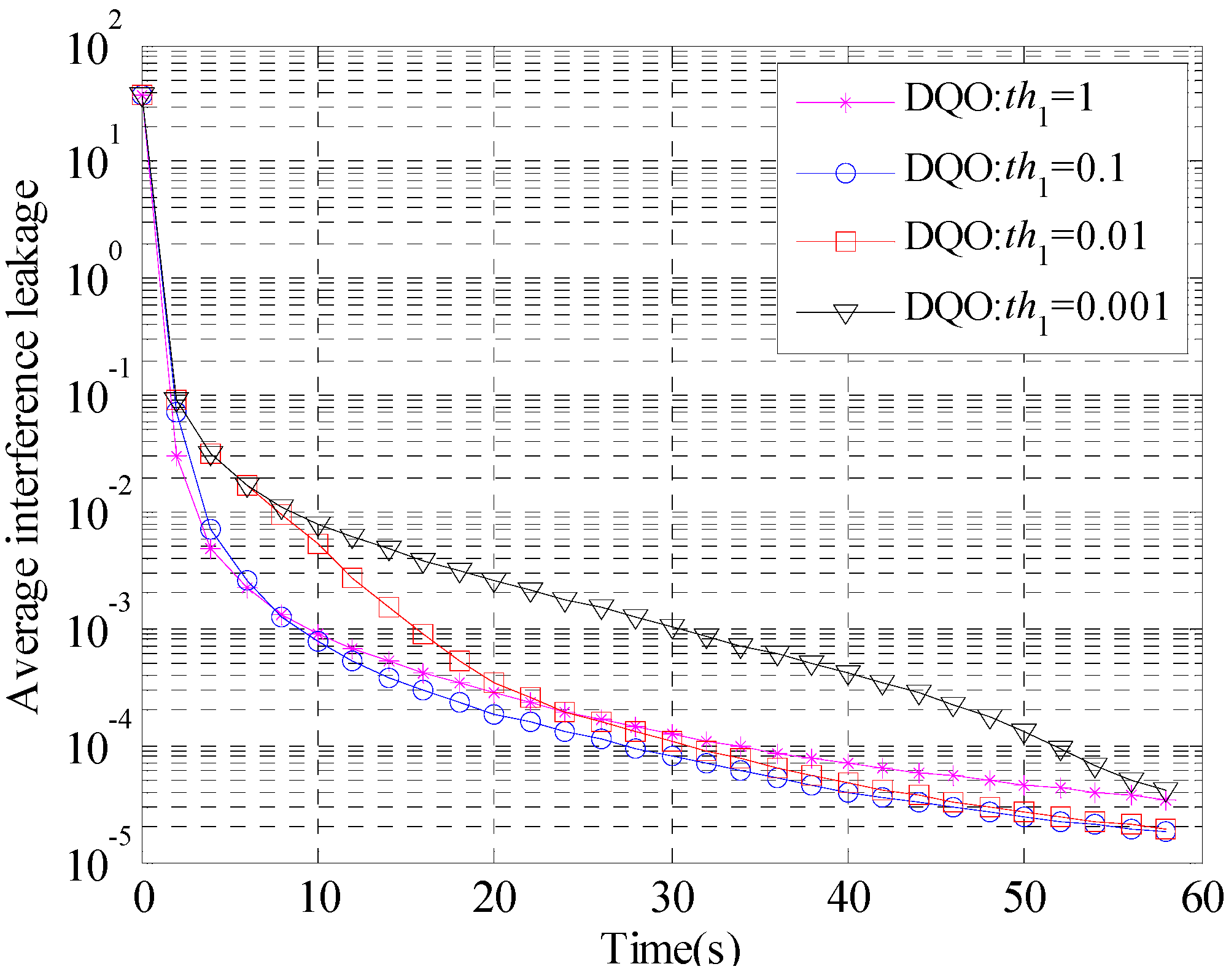
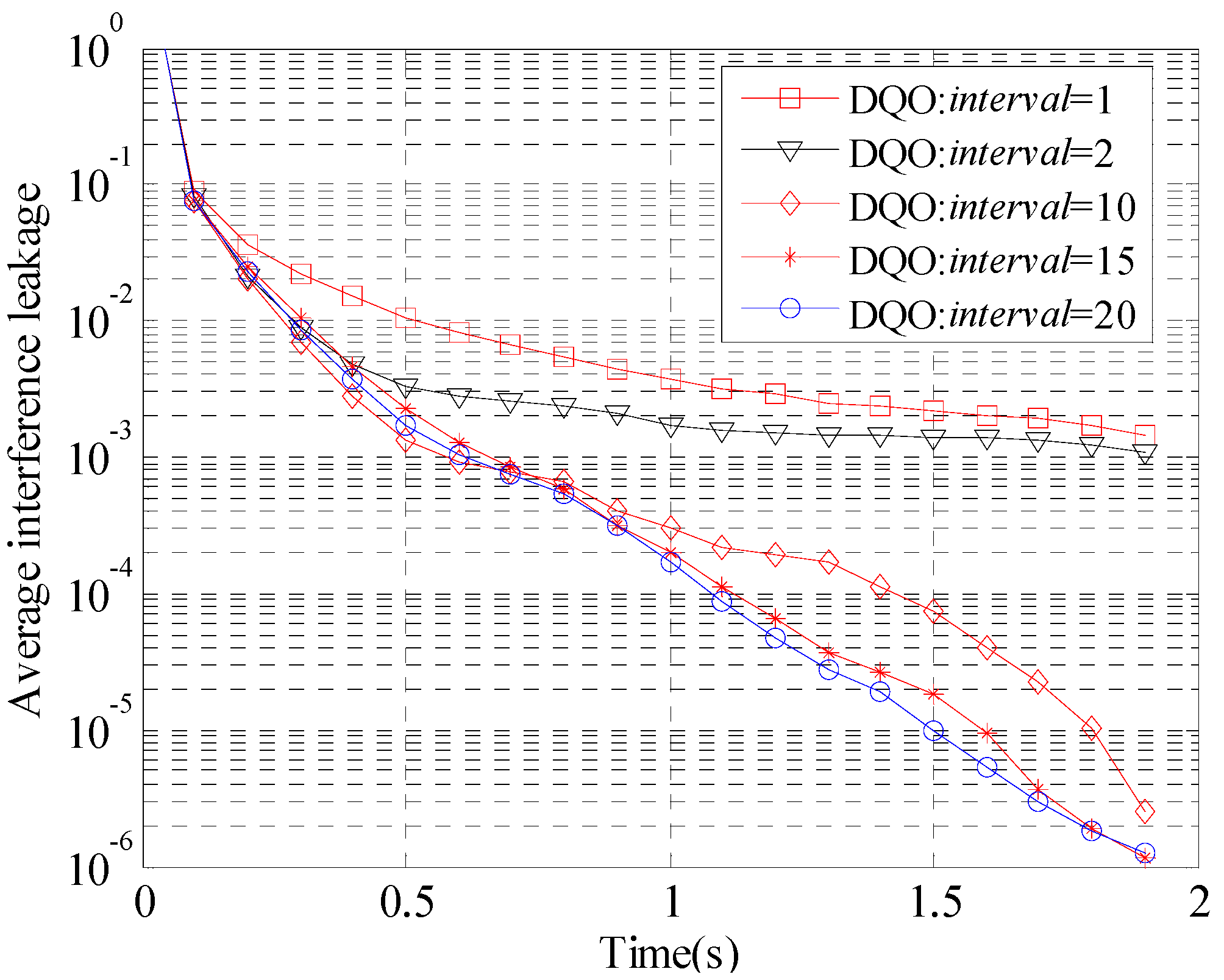
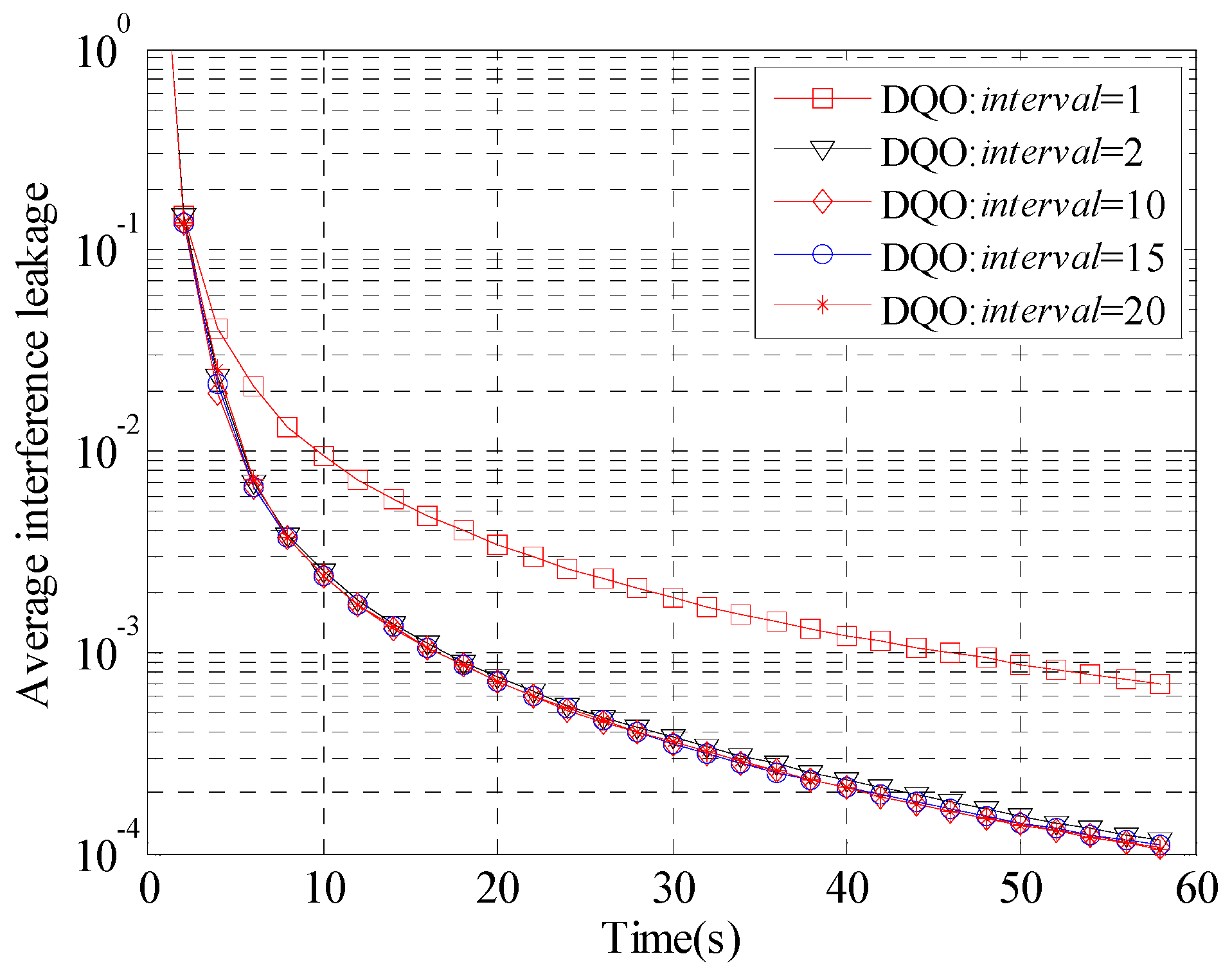
The procedure of DQO algorithm is summarized in Algorithm 2. The framework of DQO algorithm is based on the AMIL algorithm, and the LS procedure is added. In the initial phase of DQO algorithm, it operates just like the AMIL algorithm. The VU and UV steps are executed, and the interference leakage L is evaluated in each iteration. When L is smaller than the preset threshold th1, as shown in the 21-th line of Algorithm 2, the variable flag is set and the current number of iterations is recorded as ib, indicating that the current point is close enough to the convergence value and the LS procedure can be implemented. Notice that flag and ib are updated only once and will remain unchanged afterward. After flag is set, the algorithm will execute the LS procedure every interval iterations, as shown in the 10-th line. The LS procedure cannot be carried out in every iteration for the reason that the approximations Equations (46) and (47) can be attained only when i1 is large enough.
| Algorithm 2 DQO Algorithm |
Initialize , with (k = 1, 2,…, K). Initialize parameters: th1, th2 (th2 < th1), Imax, and interval. Set flag = 0, i = 0, and ib = 0. Repeat i = i + 1. (VU-step):Calculate according to Equation (2). Update so that (UV-step):Calculate
according to Equation (3). Update
so that If flag = 1 and (i − ib) mod interval = 0, execute the LS procedure as: (a) Calculate the new iteration direction as: (b) Calculate the optimal step size t*. (c) Update and
as: (d) Normalize each column of and . else Calculate the interference leakage L according to Equation (5) If th2 < L < th1 and flag =0 Set flag = 1 and ib = i. end if. end if. Until L < th2 or i > Imax.
|
Therefore, it has to take several UV and VU steps before
takes the dominant proposition so that Equations (35) and (36) hold. As a result, the parameter
interval cannot be set to be one, and it will be further validated by simulation in
Section 5.1. During each LS procedure, the new direction is calculated by subtracting the consecutive iteration results. The optimal step size
t* can be obtained by solving a quartic optimization problem, and the associated details will be provided in
Section 4.2. The new precoders and decoders are updated as the 16-th and 17-th lines. To guarantee the unit norm of the precoders and decoders, we normalize each column of
U and
V in the 18-th line. The algorithm will stop when the interference leakage is smaller than the objective threshold
th2 or the maximal iterations number
Imax is reached.
4.2. Optimal Step Size Calculation
The step size in DQO algorithm is an essential parameter which has a significant impact on the efficiency. Aiming at minimizing the interference leakage along the line search direction, the optimal step size can be calculated analytically by solving a quartic optimization problem. As is shown in Equations (35) and (36), the step size
t should be a real value. From Equations (2), (4) and (5), the total interference leakage in the case of
Uk +
tΔ
Uk,
Vk +
tΔ
Vk (
k = 1, 2, …,
K) can be formulated as:
Without loss of generality, we assume
Pl/
d = 1 and define:
Then Equation (54) can be formulated as a real quartic function of
t:
where:
In order to obtain the global minimum value of Equation (59), the following lemma is firstly introduced:
Lemma 1. For a real quartic function f(t) = a4t4 + a3t3 + a2t2 + a1t + a0, t ∈ R, with a4 > 0, there exists an optimal t* ∈ R that satisfies f′(t*) = 0, so that f(t*) is the global minimal value of f(t).
Proof of Lemma 1. As
a4 > 0 and
, it can be obtained that
and
. Therefore, there exist
a,
b ∈ R, so that
f′(
t) > 0,
t ∈ [
b, ∞) and
f′(
t) < 0,
t ∈ (−∞ ,
a]. Thus,
f(
t) increases monotonously in
t ∈ [
b, ∞) and has the minimal value
f(
b) at
t =
b. Similarly,
f(
t) decreases monotonously in
t ∈ (−∞ ,
a] and has the minimal value
f(
a) at
t =
a. When
t ∈ [
a,
b], due to continuity,
f(
t) must have the minimal value
f(
c) at
t =
c where
c ∈ [
a,
b]. Hence, min{
f(
a),
f(
b),
f(
c)} is the global minimum of
f(
t). In conclusion, there exists
t* ∈ R (or
t* ∈ {
a,
b,
c}) so that
f(
t*) is the global minimal value. For
f(
t) ≥
f(
t*), the left and right derivatives at
t* can be formulated as:
For , we must have . Therefore, the global optimal value t* must be chosen from the solutions that satisfy f′(t*) = 0. When f′(t*) = 0 has only one real solution, it is the optimal t*. When f′(t*) = 0 has 2 or 3 real solutions, t* is the one that has the smallest function value.
From Equation (60) we have
a4 > 0. According to Lemma 1, it can be deduced that there exists
t* ∈ R with zero derivative, which makes
L(
t*) as the global minimal value of Equation (59). Let:
The discriminant of Equation (65) is:
, where Δ
1 = (
bc)/(6
a2) −
b3/(27
a3) −
d/(2
a), Δ
2 =
c/(3
a) −
b2/(9
a2),
a = 4
a4,
b = 3
a3,
c = 2
a2, and
d =
a1. And the 3 solutions of Equation (65) are given by:
where
x1 = −
b/(3
a),
, and
. When Δ > 0 or Δ = Δ
1 = Δ
2 = 0, there is only one real root
t1 which is the optimal
t*; when Δ = 0 and Δ
1 = Δ
2 ≠ 0, there are 2 real roots; when Δ < 0, there are 3 real roots. If there are more than one real root,
t* is the one that has the smallest function value.
4.3. Computational Complexity Analysis
The computational complexity of the AMIL and DQO algorithms is analyzed according to the number of complex multiplications (NoCM). For the AMIL algorithm, the complexity comes from the covariance matrices calculation, eigenvalue decomposition, and interference leakage evaluation with the complexity of
K(
K − 1)(
MNd +
Md2 +
Nd2), 9
K(
M3 +
N3), and
K(
K − 1)(
d2M +
d3), respectively [
17]. Therefore the NoCM per iteration of the AMIL algorithm is summarized as:
For the DQO algorithm, the complexity of the VU-step, UV-step, and interference leakage calculations are the same as those of the AMIL algorithm, and the extra complexity comes from the LS procedure. The complexity of LS comes from the coefficients calculation of Equations (55)–(58) and Equations (60)–(63), solving Equation (65), and normalization. The complexity of each LS procedure is analyzed as follows:
(1) As shown in Equation (55), αkl can be rewritten as . Since and have been calculated in as shown in Equation (3), the complexity of computing αkl only comes from the multiplication of and , with the NoCM of d2M. As k and l traverse from 1 to K with l ≠ k, the total complexity of calculating all αkl is K(K − 1)d2M. Similarly, βkl, γkl, and δkl have the same complexity as αkl.
(2) The complexity of calculating a1–a4 mainly comes from the multiplications among αkl, βkl, γkl, and δkl. Notice that only the traces of the products are required, and we don’t have to compute all the elements of the products. Therefore, the complexity of calculating a1–a4 are 2K(K − 1)d2, 4K(K − 1)d2, 2K(K − 1)d2, and K(K − 1)d2, respectively. Notice that there is no need to calculate a0.
(3) The number of real solutions of Equation (65) depends on Δ
1, Δ
2 as well as Δ, and we consider the most complex case of 3 real solutions. The details of the complexity of solving the cubic equation are listed in
Table 1. NoRM, NoRD, NoSRC, and NoCRC are employed to represent the number of real multiplications, real divisions, square root calculations, and cubic root calculations, respectively.
Table 1.
Complexity of solving the cubic Equation (65).
Table 1.
Complexity of solving the cubic Equation (65).
| Types | NoRM | NoRD | NoSRC | NoCRC |
|---|
| a, b, c, d | 3 | 0 | 0 | 0 |
| Δ1 | 9 | 3 | 0 | 0 |
| Δ2 | 4 | 2 | 0 | 0 |
| Δ | 3 | 0 | 0 | 0 |
| x1 | 1 | 1 | 0 | 0 |
| x2 | 0 | 0 | 1 | 1 |
| x3 | 0 | 0 | 1 | 1 |
| t1 | 0 | 0 | 0 | 0 |
| t2 | 8 | 0 | 0 | 0 |
| t3 | 8 | 0 | 0 | 0 |
| L(t) | 21 | 0 | 0 | 0 |
| Total | 57 | 6 | 2 | 0 |
(4) and are normalized so that the norm of each column is one. The normalization of one column of takes M complex multiplications, one square root calculation and two real divisions. Therefore the normalization of all the precoding matrices takes dMK complex multiplications, dK square root calculations, and 2dK real divisions. Similarly, the normalization of all the decoding matrices takes dNK complex multiplications, dK square root calculations, and 2dK real divisions.
(5) As the complexity of one complex multiplication equals four real multiplications, the number of real multiplications will be replaced with the equivalent number of complex multiplications. And the complexity of one line search is summarized in
Table 2.
Therefore the total number of equivalent complex multiplications of one line search is:
And the number of real divisions, square root calculations and cubic root calculations in one LS are 4
dK + 6, 2
dK + 2, and 2, respectively. As LS is implemented every
interval iteration, the average NoCM per iteration of DQO algorithm is:
Table 2.
Complexity of one line search.
Table 2.
Complexity of one line search.
| Types | NoRM | NoRD | NoSRC | NoCRC |
|---|
| αkl | K(K − 1)d2M | 0 | 0 | 0 |
| βkl | K(K − 1)d2M | 0 | 0 | 0 |
| γkl | K(K − 1)d2M | 0 | 0 | 0 |
| δkl | K(K − 1)d2M | 0 | 0 | 0 |
| a1 | 2K(K − 1)d2 | 0 | 0 | 0 |
| a2 | 4K(K − 1)d2 | 0 | 0 | 0 |
| a3 | 2K(K − 1)d2 | 0 | 0 | 0 |
| a4 | K(K − 1)d2 | 0 | 0 | 0 |
| Solve (65) | 14.25 | 6 | 2 | 2 |
| Normalization | dK(M + N) | 4dK | 2dK | 0 |
The complexity of the AMIL and DQO algorithms with the parameter
interval = 20 (the mechanism for determining the parameter will be provided in
Section 5.1) is compared in
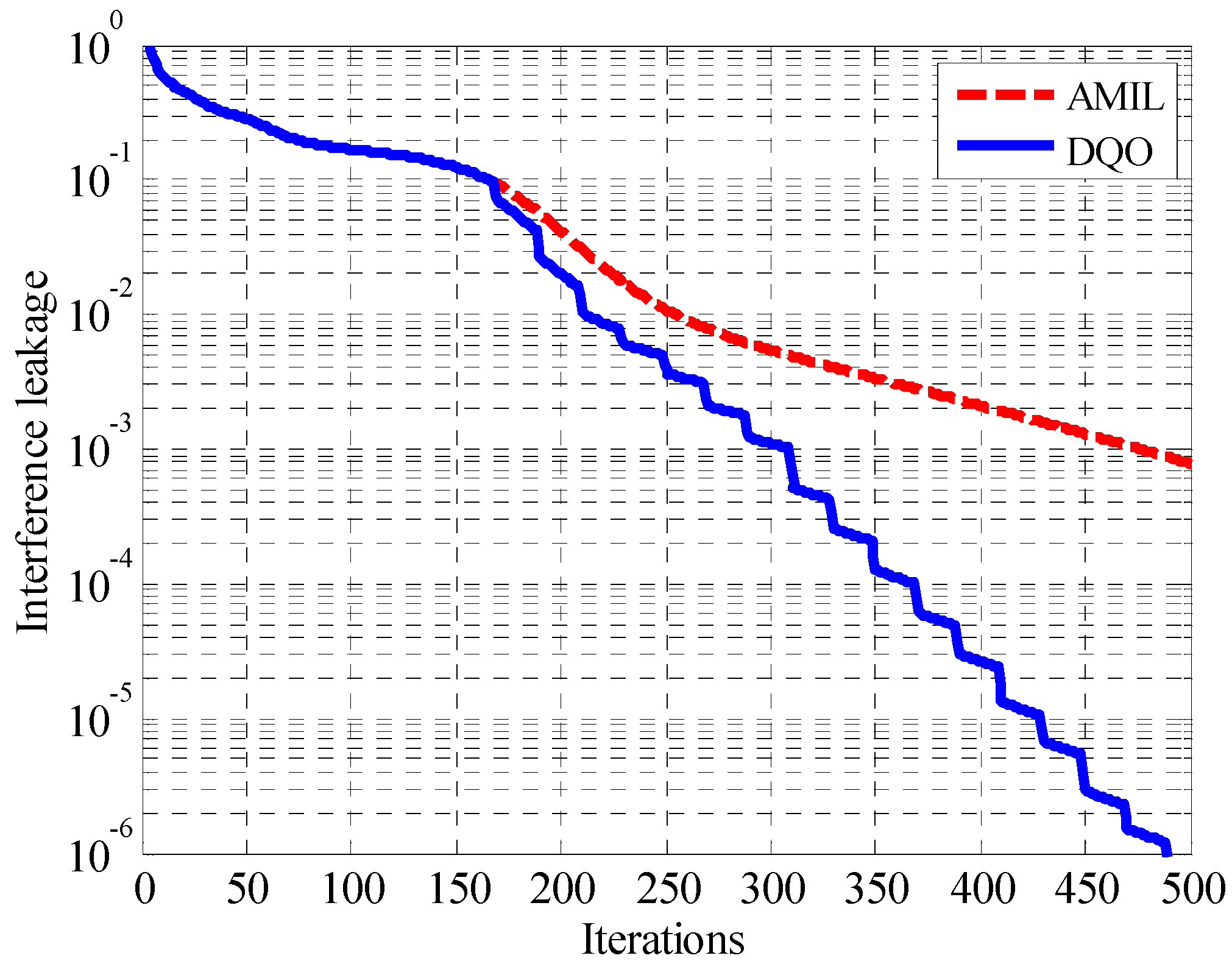
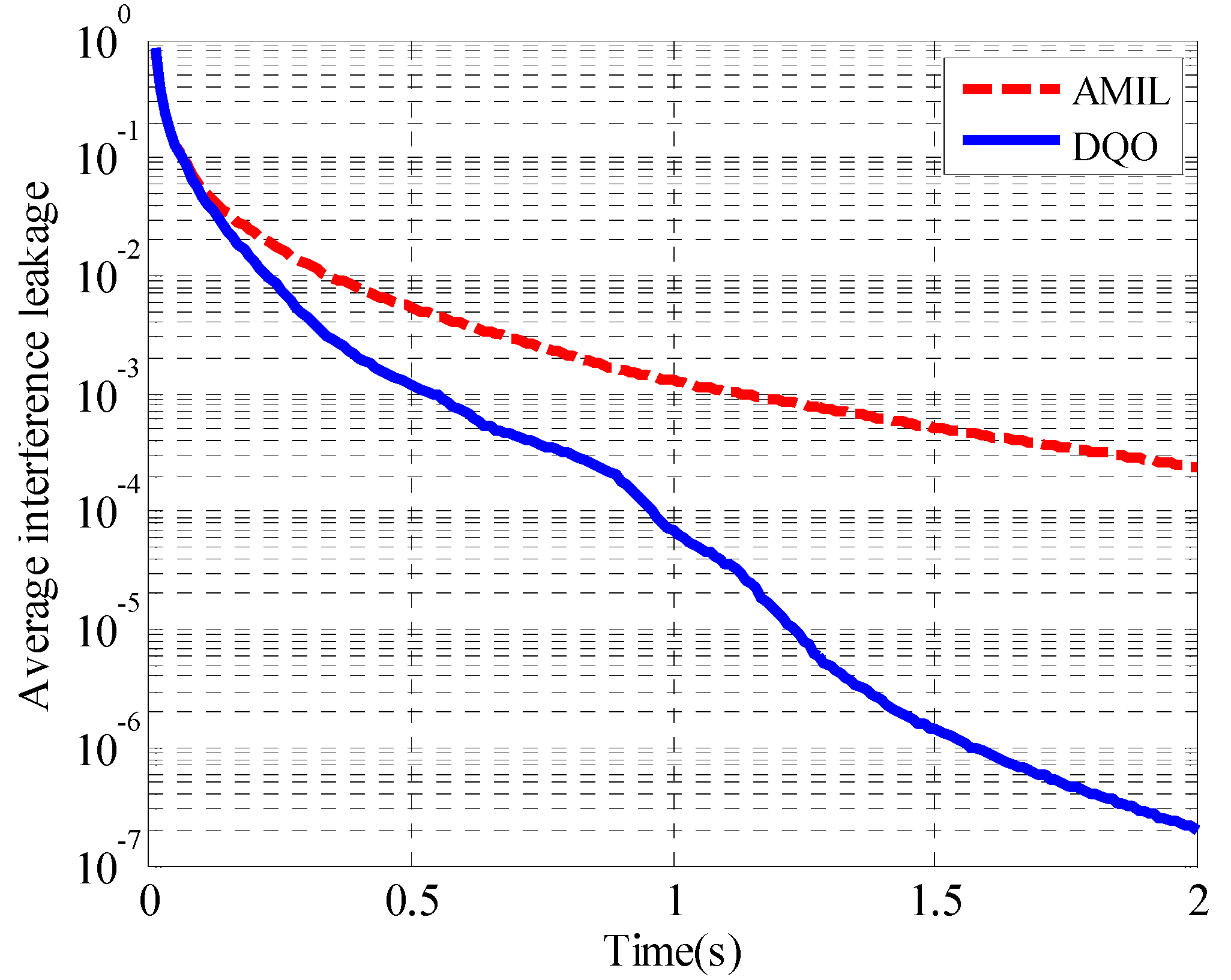
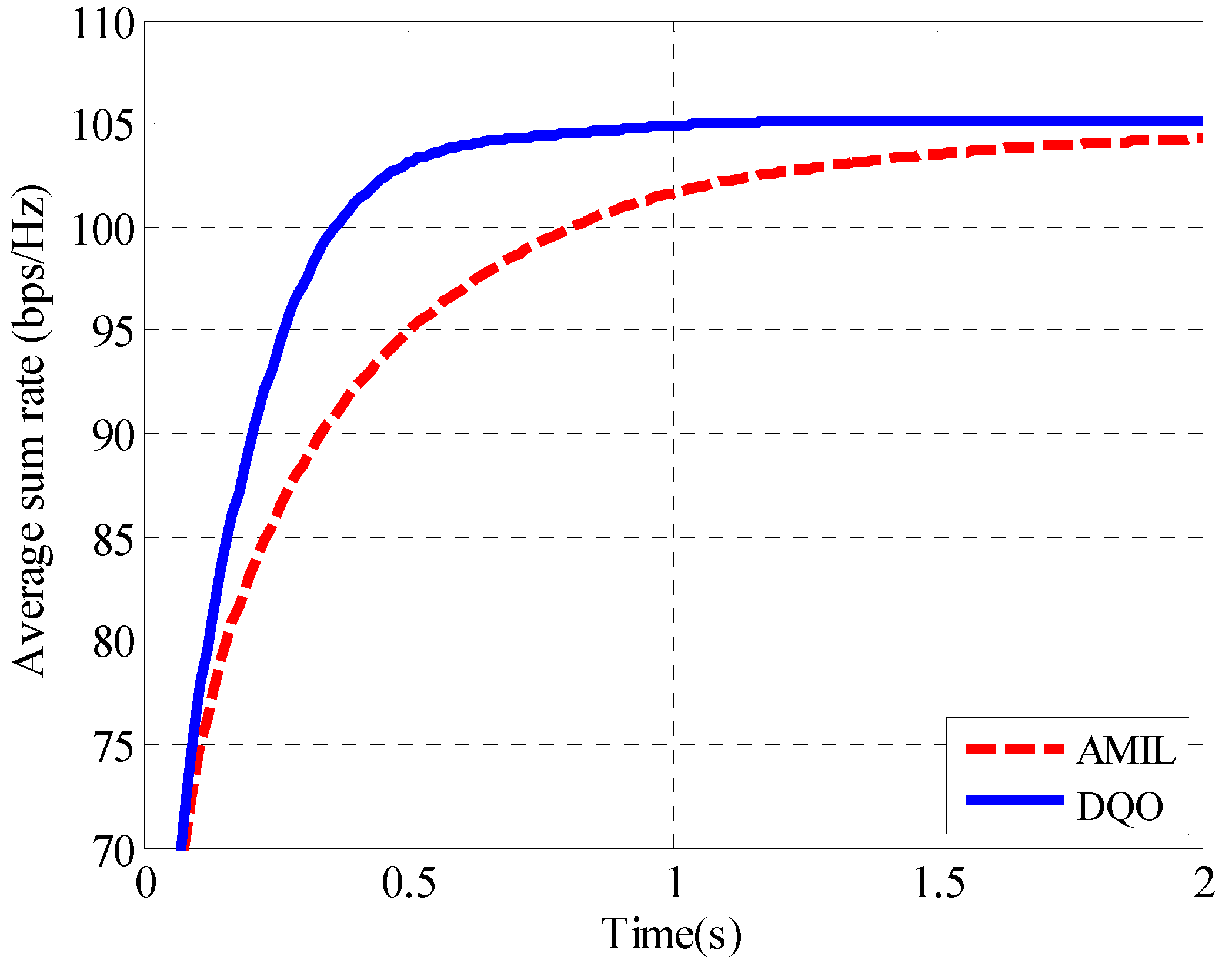
Table 3. From the comparison, it can be seen that the average NoCM of the DQO algorithm per iteration is only slightly higher than that of the AMIL algorithm. Although LS will bring extra complexity per iteration, it can reduce the number of iterations significantly and thus lower the overall computational complexity, which will be shown in the numerical results.
Table 3.
Complexity of AMIL and DQO algorithms in (M × M, d)K with interval = 20.
Table 3.
Complexity of AMIL and DQO algorithms in (M × M, d)K with interval = 20.
| (M × N, d)K | CAMIL | CDQO | CDQO/CAMIL |
|---|
| (6 × 6, 1)11 | 5.61 × 104 | 5.63 × 104 | 1.003 |
| (6 × 6, 2)5 | 2.49 × 104 | 2.50 × 104 | 1.006 |
| (7 × 7, 1)13 | 1.06 × 105 | 1.06 × 105 | 1.003 |
| (7 × 7, 2)6 | 4.78 × 104 | 4.80 × 104 | 1.005 |
| (8 × 8, 1)15 | 1.82 × 105 | 1.83 × 105 | 1.002 |
| (8 × 8, 2)7 | 8.37 × 104 | 8.40 × 104 | 1.004 |
| (9 × 9, 1)17 | 2.94 × 105 | 2.95 × 105 | 1.002 |
| (9 × 9, 2)8 | 1.37 × 105 | 1.37 × 105 | 1.004 |
| (10 × 10, 1)19 | 4.52 × 105 | 4.53 × 105 | 1.002 |
| (10 × 10, 2)9 | 2.12 × 105 | 2.12 × 105 | 1.003 |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








