
Tracking the Evolution of Smartphone Sensing for Monitoring Human Movement


Abstract
:
1. Introduction
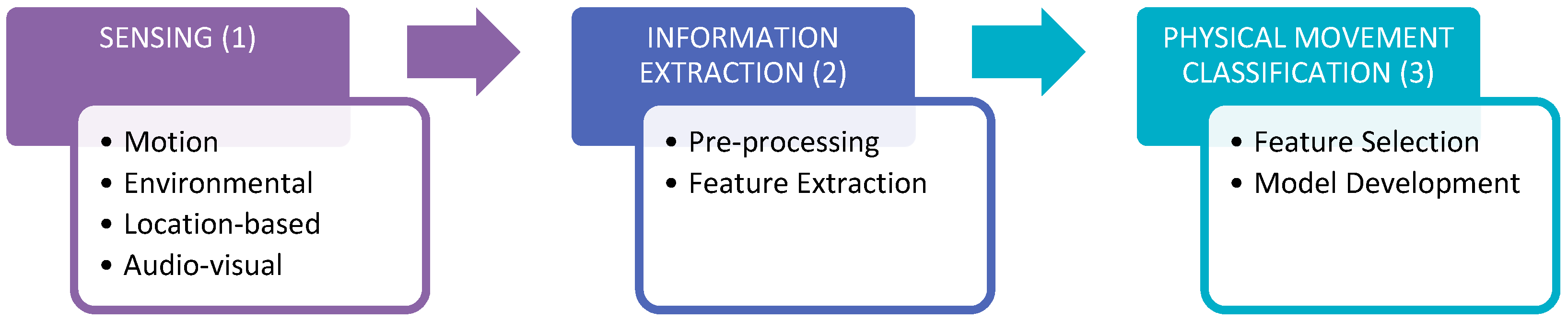
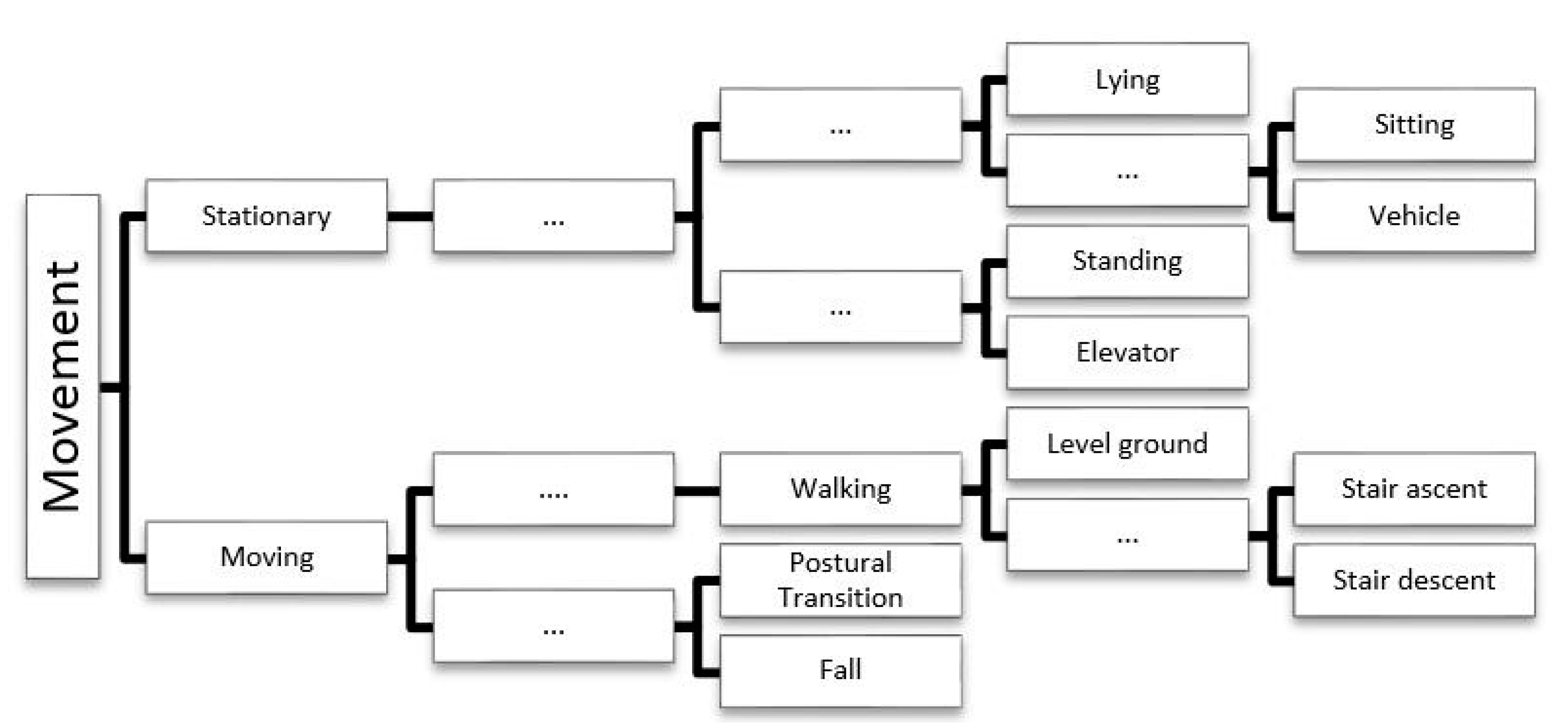
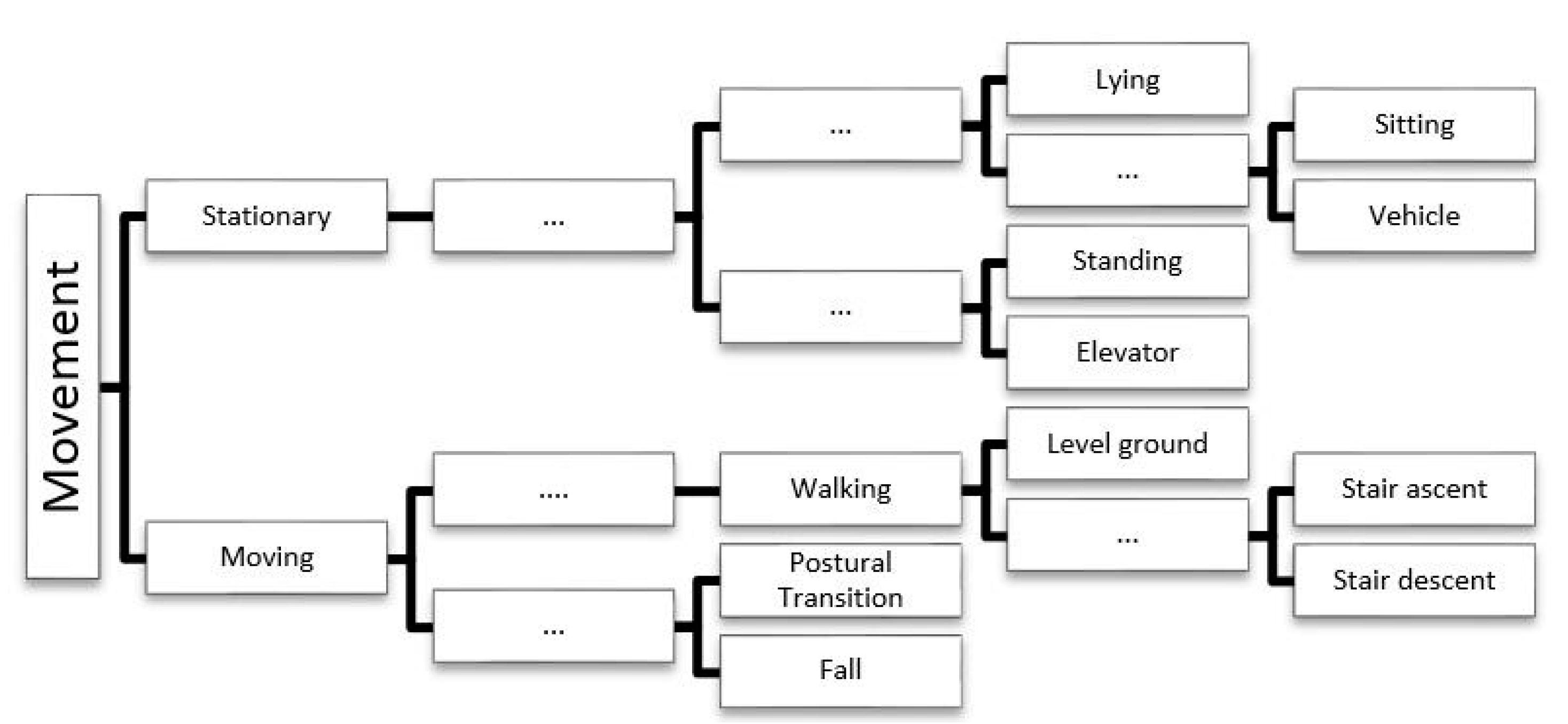
2. Identifying Physical Movement

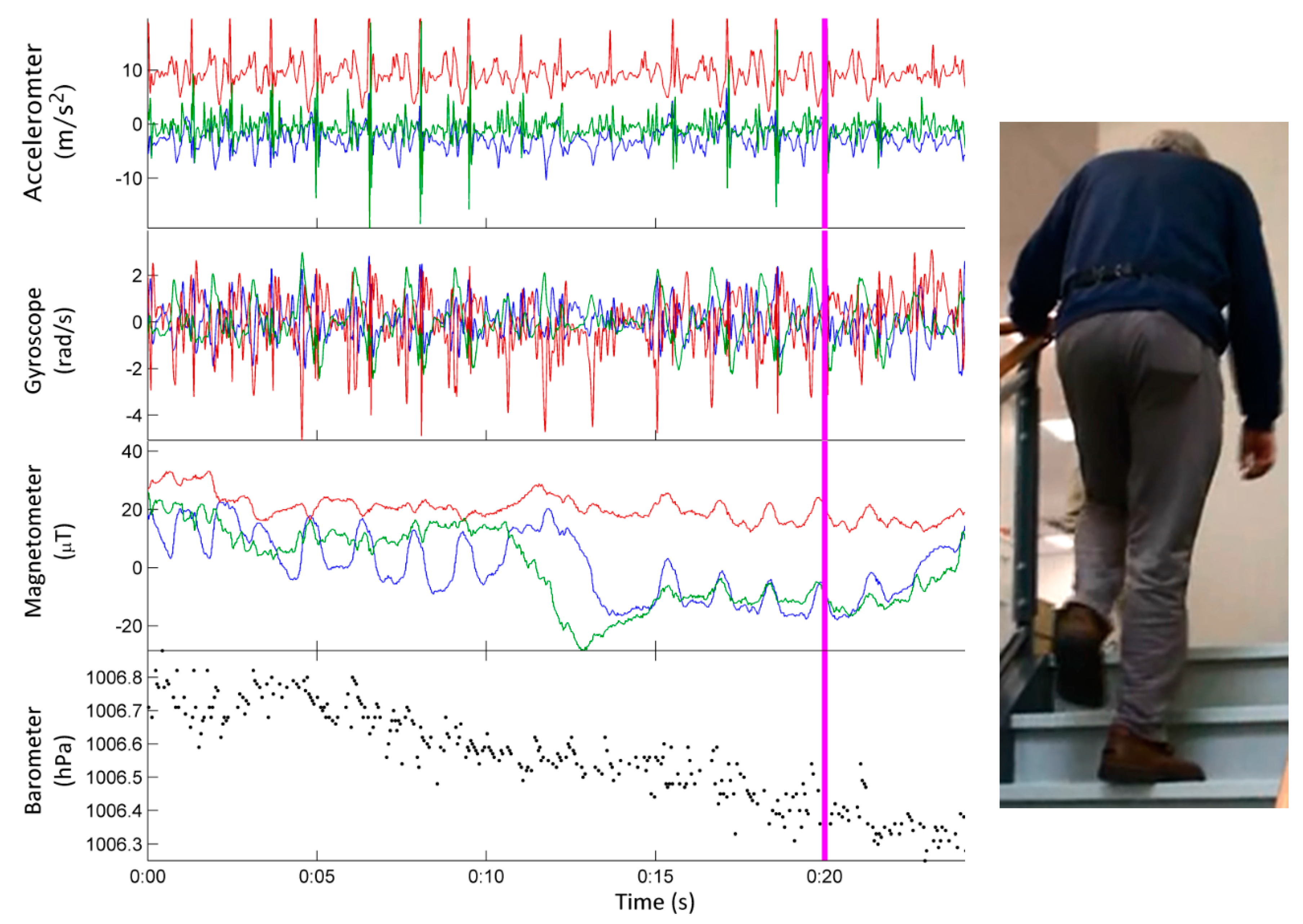
2.1. Sensing
2.1.1. Motion MEMS Sensors
2.1.2. Environmental MEMS Sensors

2.1.3. Location-Based Sensors
2.1.4. Audio-Visual Sensing Components
2.2. Information Extraction
2.2.1. Pre-Processing
2.2.2. Feature Extraction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Domain | Feature | Accelerometer | Gyroscope | Magnetometer | Barometer | Microphone | GPS/GSM/Wi-Fi |
|---|---|---|---|---|---|---|---|
| Position/altitude | ✓ | ✓ | ✓ | ✓ | ✓ | ||
| Time | Signal Magnitude Area [2] | ✓ | ✓ | ||||
| Signal vector magnitude [4] | ✓ | ✓ | ✓ | ||||
| Differential pressure [11] | ✓ | ||||||
| Autoregressive coefficients [56] | ✓ | ||||||
| Tilt angle [58] | ✓ | ✓ | |||||
| Relative altitude [67] | ✓ | ||||||
| Peak-to-peak amplitude | ✓ | ✓ | |||||
| Zero crossing rate [68] | ✓ | ✓ | ✓ | ||||
| Short-time average energy [69] | ✓ | ||||||
| Frequency | Low energy frame rate [46] | ✓ | |||||
| Entropy [64] | ✓ | ✓ | |||||
| Energy [70] | ✓ | ✓ | |||||
| Fast Fourier transform coefficients [71] | ✓ | ✓ | |||||
| Discrete cosine transform coefficients [72] | ✓ | ✓ | |||||
| Spectral flux [73] | ✓ | ||||||
| Spectral roll-off [74] | ✓ | ||||||
| Spectral centroid [74] | ✓ | ||||||
| Bandwidth [74] | ✓ | ||||||
| Normalised weighted phase deviation [75] | ✓ |
2.3. Physical Movement Classification
2.3.1. Feature Selection
2.3.2. Model Development
| Machine Learning Algorithms (MLAs) | ||
|---|---|---|
| Hidden Markov Models (HMM) | K Nearest Neighbours (KNN) | Support Vector Machines (SVM) |
| Bayesian Networks (BN) | Gaussian Mixture Models (GMM) | Logistic Regression (LR) |
| Naïve Bayes (NB) | Decision Tree Classifiers (DTC) | Artificial Neural Networks (ANN) |
3. Limitations Leading to Algorithm Evolution
| Fixed to the body (a) | Body position dependent (b) | Body position independent (c) | ||
|---|---|---|---|---|
 |  |  | |  |
3.1. Fixed to the Body Algorithms (FBAs)
| Author | Application | Sensors | Placement | Subjects (M:F) | Machine Learning Algorithm | Movements | Outcome |
|---|---|---|---|---|---|---|---|
| Joundi et al. [32] | Rapid tremor assessment | Accelerometer | Strapped to the forearm or lower leg | 7 (undisclosed) | Undisclosed | Tremor (multiple sclerosis, essential tremor, post-stroke, dystonic, Parkinson’s Disease ) | iPhone accelerometer can be used to identify the dominant tremor frequency |
| He and Li [77] | Physical movement, simulated falls | MIMU | Placed in a strap over the chest | 10 (6:4) | Hierarchical classifier comprised of 14 binary classifiers. | Sitting, lying, standing, postural transitions, walking, stair ascent and descent, running, jumping, falling (forward, backward, to the left or right) | Accuracy 95.03% |
| Marshall [89] | Swim coach | MIMU | Placed on the lower back | Undisclosed | Undisclosed | Body posture, swim velocity | Undisclosed |
| Mitchell et al. [90] | Athletic performance during five-a-side soccer and field hockey | Accelerometer | Inserted into vest, between scapulae | 32 (undisclosed) | Wavelet transform, NB, KNN, ANN, DTC, SVM | Stationary, walking, jogging, sprinting, hitting the ball, standing tackle, dribbling | Fsoccer = 0.799 Fhockey = 0.823 |
| Kranz et al. [91] | Physical exercise trainer | Accelerometer, magnetometer, Wi-Fi, 3G | Placed in the centre of a balance board | 6 (undisclosed) | Pyramidal principal component breakdown analysis | Static and dynamic balancing exercises performed on a balancing board (20 in total) | rdynamic = 0.549 rstatic = 0.771 |
| Muehlbauer et al. [92] | Detect specific upper arm exercises and the number of repeats | IMU | Holster on upper arm | 7 (6:1) | KNN | Butterflies, chest press, latissimus, abdominal, upper back, shoulder press, pulldown, low row, arm curl or extension | Accuracy 85.1% |
| Tacconi et al. [95] | Simulated falls | Accelerometer | Belt-worn on the waist over the lower back | 3 (undisclosed) | Single-threshold based algorithm | Various falls: forward, lateral, backward, sliding against a wall, out of bed | Detected 65 out of 67 simulated falls |
| Shumei et al. [96] | Physical movement | Accelerometer | Belt-worn on the left side of the waist, landscape orientation. | 10 (7:3) | DTC SVM | Sitting, standing, lying, walking, postural transitions, gentle motion | Accuracy 82.8% |
| Anguita et al. [97] | Physical movement | IMU | Placed in a belt on the waist | 30(undisclosed) | SVM | Standing, walking, sitting, lying, stair ascent, stair descent | Accuracy 89% |
| Aguiar et al. [98] | Physical movement, estimate energy expenditure | Accelerometer | Placed in a belt, worn on the waist | 31 (21:10) | DTC | Lying, standing, walking, random, running | Accuracy 99.4% |
| Pernek et al. [100] | Exercise repetition detection using exercise machines in a gym or free weights and resistance bands. | Accelerometer | Placed on the exercise machines weights; attached to the wrist or ankle. | 10 (6:4) | Logistic regression | Squats, leg curl, leg extension, calf raise, triceps extensions, bicep curls, abdominal crunches, bench press | F = 0.993 ± 0.034 |
| Stöggl et al. [101] | Cross-country skiing | Accelerometer | Smartphone strapped to chest (portrait orientation) | 11 (7:4) | Markov chain of multivariate Gaussian distributions | Skating techniques G2, G3. G4. G5 | Accuracy 100% |
| Mellone et al. [102] | Simulated falls | MIMU | Placed in a belt and worn on the waist over the lower back | Undisclosed | Threshold of 2.3 g on the acceleration sum vector | Timed-up-and-go test, fall detection | Validation of smartphone’s ability to host another process for fall monitoring. |
3.2. Body Position Dependent Algorithms (BPDAs)
| Author | Application | Sensors | Placement | Subject total (M:F) | Machine Learning Algorithm | Movements | Outcome |
|---|---|---|---|---|---|---|---|
| Guidoux et al. [33] | Physical movement, estimate energy expenditure | Accelerometer | Pants pocket | 12 (6:6) directed 30 (15:15) free-living | Periodic function peak | Sitting, normal and brisk walking, stair ascent, stair descent, standing, slow running, riding a tram | Accuracy of 73.3% ± 10.3% |
| Shoaib et al. [65] | Physical movement | MIMU | Pants pocket, chest pocket, lateral surface of the bicep, wrist | 10 (10:0) | DT, KNN, BN, NB. SVM, LR | Stair ascent, stair descent, walking, jogging, biking, sitting, standing | Gyroscope can detect stair ascent/descent with greater accuracy than accelerometer. Jogging, walking and running identified at comparable rates with either gyroscope or accelerometer |
| Aguiar et al. [98] | Physical movement, estimate energy expenditure | Accelerometer | Pants pocket | 31 (21:10) | Decision tree algorithm | Sitting, standing, walking, running, random | Accuracy of 99.5% |
| Albert et al. [103] | Physical movement | Accelerometer | Pants pocket | 18 (6:12) 8 (1:7) | SVM, sparse multinomial LR | Walking, standing, sitting, holding the phone whilst standing (arms bent forward), holding phone placed on table | The model trained on data from 18 healthy individuals could only predict the activity of the 8 individuals with Parkinson’s disease with an accuracy of 60.3% |
| Pei et al. [104] | Physical movement | MIMU | Pants pocket | 4 (undisclosed) | Least squares SVM | Sitting, walking, fast walking, standing, sharp turning (>90°), small turns ( | Accuracy 92.9% |
| Del Rosario et al. [105] | Physical movement | IMU, barometer | Pants pocket | 57 (40:17) | J48 DT | Standing, sitting, lying, walking, stair ascent, stair descent, postural transitions, elevator up, elevator down | Data from older cohort can be used to build a decision tree based classifier that is more robust at estimating activities of daily living from different age groups. |
| Varnfield et al. [106] | Count steps, physical activity level | Accelerometer | Belt on waist | 11 (7:4) | Undisclosed | Count steps, activity level: (sparse, moderate, high, intense) | Step counter <2% error rate in controlled environment |
3.3. Body Position-Independent Algorithms (BPIAs)
| Author | Application | Sensors | Placement | Subject Total (M:F) | Machine Learning Algorithm | Movements | Outcome |
|---|---|---|---|---|---|---|---|
| Khan et al. [54] | Physical movement | Accelerometer, barometric pressure, microphone | Front and back pants pocket, jacket breast pocket | 30 (18:12) | Kernel discriminant analysis, SVM | Walking, walking on treadmill, running, running on treadmill, stair ascent, stair descent, elevator up, elevator down, hopping, riding a bike, inactive (sitting or standing), watching TV, vacuuming, driving a car, riding a bus | Accuracy 94% |
| Khan et al. [56] | Physical movement | Accelerometer | Front and back pants pocket, jacket breast pocket | 10 (6:4) | ANN | Standing, walking, running, stair ascent, stair descent, hopping | Accuracy 86.98% |
| Henpraserttae et al. [61] | Physical movement | Accelerometer | 16 orientations on the waist, shirt and pants pocket | 10 (undisclosed) | KNN (k = 3) | Lying, sitting, standing, walking, running, jumping | Accuracy 86.36% |
| Antos et al. [93] | Physical movement | IMU | Hand, belt on waist, pants pocket, backpack | 12 (undisclosed) | SVM, HMM | Standing, sitting, walking, transitions between sitting and standing | Accuracy 87.1% |
| Anjum and Ilyas [115] | Physical movement | IMU | Hand, pants pocket, handbag, shirt pocket | 10 (undisclosed) | J48 DT | Walking, running, stair ascent, stair descent, driving, cycling, inactive | Accuracy 94.39% |
| Lu et al. [121] | Physical movement | Accelerometer, microphone, GPS | Pants pocket (front/back), hand, armband, backpack, belt, jacket breast pocket | 16 (12:4) | SVM | Stationary, walking, cycling, running, vehicle | Accuracy 95.1% |
| Han et al. [122] | Physical movement, context recognition | Wi-Fi, GPS, microphone, accelerometer | Waist, pants pocket or hand | 10 (undisclosed) | HMM, GMM | Walking, jogging, inactive, bus moving, bus (traffic jam) bus stationary, subway moving, subway stationary | Accuracy 92.43% |
| Sun et al. [123] | Physical movement | Accelerometer | Pants pocket (front/back), 4 different orientations in the front pants pocket, blazer front pocket | 7 (6:1) | SVM | Stationary, walking, running, cycling, stair ascent, stair descent, driving | F-score 93.1% |
| Thiemjarus et al. [124] | Physical movement | Accelerometer | Placed on the waist, in the shirt and trouser pocket | 8 (6:2) | KNN (k = 1) | Lying, sitting, standing, walking, running, jumping | Accuracy 75.19% |
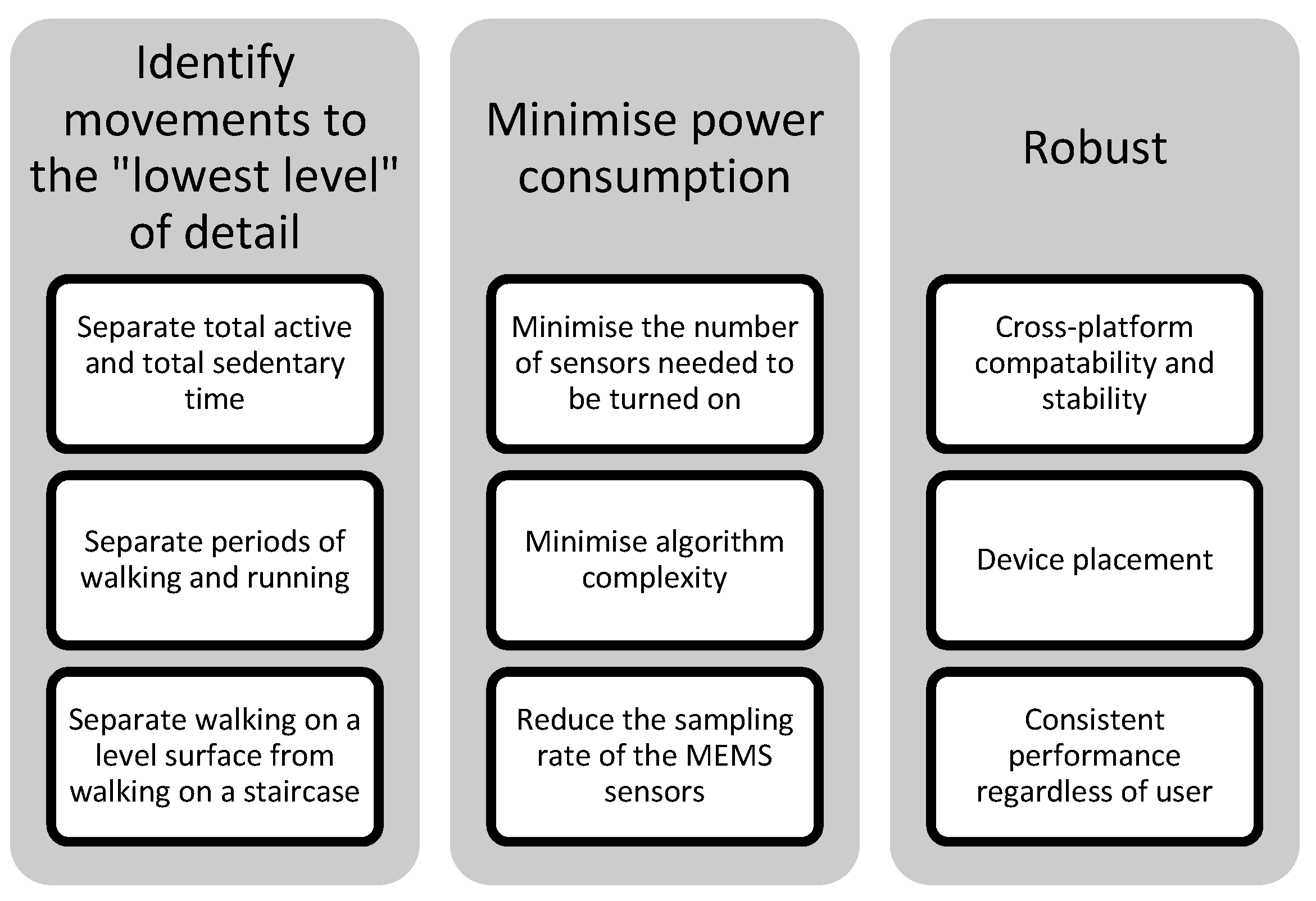
4. Challenges

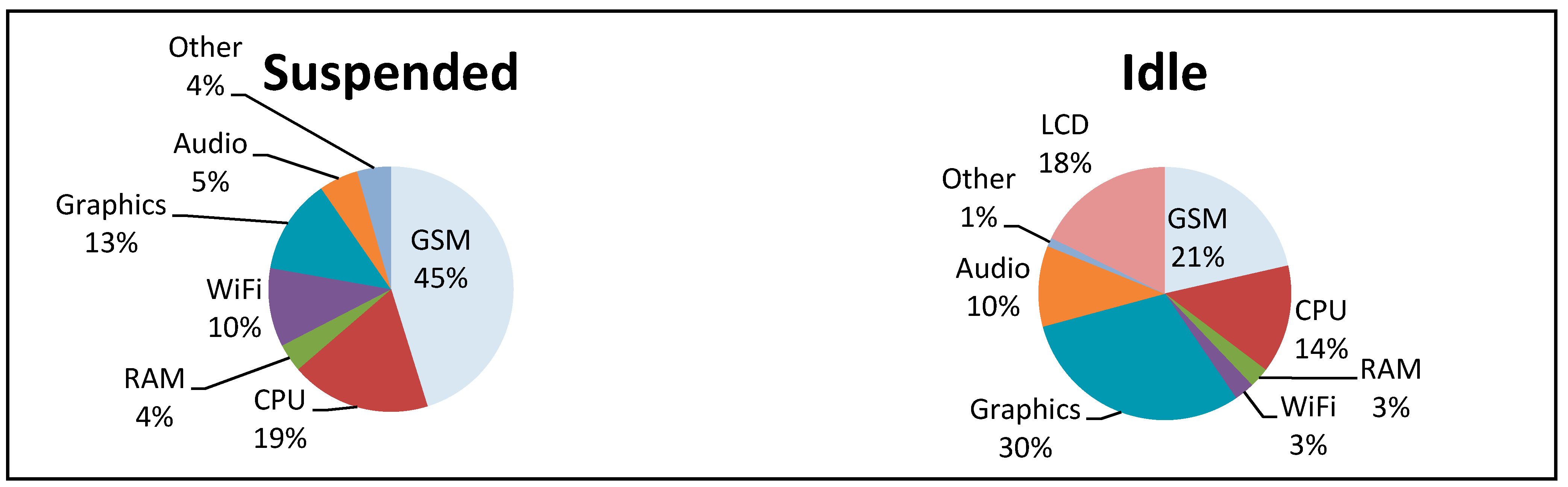
4.1. Smartphone Battery Life

4.2. Algorithm Granularity
4.3. Algorithm Robustness
4.3.1. Cross Platform Variability
| A | G | M | B | Range | Resolution | |
|---|---|---|---|---|---|---|
| Galaxy Nexus | ✓ | ±2 g | ±0.61 m·s−2 | |||
| ✓ | ±2000 °/s | ±0.06 °/s | ||||
| ✓ | ±800 μT | ±0.15 μT (x/y axis) ±0.30 μT (z axis) | ||||
| ✓ | 300–1100 hPa | ±1 hPa | ||||
| HTC One | ✓ | ±4 g | ±0.039 m·s−2 | |||
| ✓ | ±2000 °/s | ±0.06 °/s | ||||
| ✓ | ±4900 μT | ±0.15 μT | ||||
| Samsung S4 | ✓ | ±2 g | ±0.001 m·s−2 | |||
| ✓ | ±500 °/s | ±0.057 °/s | ||||
| ✓ | ±1200 μT | ±0.15 μT (x/y axis) ±0.25 μT (z axis) | ||||
| ✓ | 300–1100 hPa | ±1 hPa | ||||
| Samsung S3 | ✓ | ±2 g | ±0.01 m·s−2 | |||
| ✓ | ±500 °/s | ±0.015 °/s | ||||
| ✓ | ±1200 μT | ±0.30 μT | ||||
| ✓ | 260–1260 hPa | ±0.24 hPa | ||||
| Samsung S2 | ✓ | ±2 g | ±0.002 m·s−2 | |||
| ✓ | ±2000 °/s | ±0.06 °/s | ||||
| ✓ | ±1200 μT | ±0.30 μT | ||||
| iPhone 6/6+ | ✓ | ±8 g | ±0.002 m·s−2 | |||
| ✓ | ±2000 °/s | ±0.06 °/s | ||||
| ✓ | ±4900 μT | ±0.15 μT | ||||
| ✓ | 300–1100 hPa | ±0.16 hPa | ||||
| iPhone 5/5s | ✓ | ±8 g | ±0.002 m·s−2 | |||
| ✓ | ±2000 °/s | ±0.06 °/s | ||||
| ✓ | ±1200 μT | ±0.30 μT | ||||
| iPhone 4/4s | ✓ | ±2 g | ±0.002 m·s−2 | |||
| ✓ | ±2000 °/s | ±0.06 °/s | ||||
| ✓ | ±1200 μT | ±0.30 μT | ||||
| LG Nexus 4 | ✓ | ±4 g | ±0.001 m·s−2 | |||
| ✓ | ±500 °/s | ±0.015 °/s | ||||
| ✓ | ±4912 μT | ±0.15 μT | ||||
| ✓ | 0–1100 hPa | ±1 hPa |
4.3.2. Device Placement
4.3.3. Inter-Subpopulation Predictive Capability
4.4. Future Research
4.4.1. New Sensing Components
4.4.2. MEMS Sensor Management
4.4.3. Convergence with Emerging Technologies
4.4.4. Algorithm Personalisation
5. Conclusions
Conflicts of Interest
References
- Montoye, H.J.; Washburn, R.; Servais, S.; Ertl, A.; Webster, J.G.; Nagle, F.J. Estimation of energy expenditure by a portable accelerometer. Med. Sci. Sports Exerc. 1983, 15, 403–407. [Google Scholar] [CrossRef] [PubMed]
- Bouten, C.V.C.; Koekkoek, K.T.M.; Verduin, M.; Kodde, R.; Janssen, J.D. A triaxial accelerometer and portable data processing unit for the assessment of daily physical activity. IEEE Trans. Biomed. Eng. 1997, 44, 136–147. [Google Scholar] [CrossRef] [PubMed]
- Jakicic, J.M.; Winters, C.; Lagally, K.; Ho, J.; Robertson, R.J.; Wing, R.R. The accuracy of the TriTrac-R3D accelerometer to estimate energy expenditure. Med. Sci. Sports Exerc. 1999, 31, 747–754. [Google Scholar] [CrossRef] [PubMed]
- Karantonis, D.M.; Narayanan, M.R.; Mathie, M.; Lovell, N.H.; Celler, B.G. Implementation of a real-time human movement classifier using a triaxial accelerometer for ambulatory monitoring. IEEE Trans. Inf. Technol. Biomed. 2006, 10, 156–167. [Google Scholar] [CrossRef] [PubMed]
- Healy, G.N.; Wijndaele, K.; Dunstan, D.W.; Shaw, J.E.; Salmon, J.; Zimmet, P.Z.; Owen, N. Objectively measured sedentary time, physical activity, and metabolic risk: The Australian diabetes, obesity and lifestyle study (AusDiab). Diabetes Care 2008, 31, 369–371. [Google Scholar] [CrossRef] [PubMed]
- Tudor-Locke, C.; Brashear, M.; Johnson, W.; Katzmarzyk, P. Accelerometer profiles of physical activity and inactivity in normal weight, overweight, and obese U.S. Men and women. Int. J. Behav. Nutr. Phys. Act. 2010, 7. [Google Scholar] [CrossRef] [PubMed]
- Kriska, A.M.; Saremi, A.; Hanson, R.L.; Bennett, P.H.; Kobes, S.; Williams, D.E.; Knowler, W.C. Physical activity, obesity, and the incidence of type 2 diabetes in a high-risk population. Am. J. Epidemiol. 2003, 158, 669–675. [Google Scholar] [CrossRef] [PubMed]
- Mokdad, A.H.; Ford, E.S.; Bowman, B.A.; Dietz, W.H.; Vinicor, F.; Bales, V.S.; Marks, J.S. Prevalence of obesity, diabetes, and obesity-related health risk factors, 2001. JAMA 2003, 289, 76–79. [Google Scholar] [CrossRef] [PubMed]
- Sama, A.; Perez-Lopez, C.; Romagosa, J.; Rodriguez-Martin, D.; Catala, A.; Cabestany, J.; Perez-Martinez, D.A.; Rodriguez-Molinero, A. Dyskinesia and motor state detection in Parkinson’s disease patients with a single movement sensor. In Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), San Diego, CA, USA, 28 August–1 September 2012; pp. 1194–1197.
- Takač, B.; Català, A.; Rodríguez Martín, D.; van der Aa, N.; Chen, W.; Rauterberg, M. Position and orientation tracking in a ubiquitous monitoring system for Parkinson disease patients with freezing of gait symptom. JMIR Mhealth Uhealth 2013, 1. [Google Scholar] [CrossRef] [PubMed]
- Bianchi, F.; Redmond, S.J.; Narayanan, M.R.; Cerutti, S.; Celler, B.G.; Lovell, N.H. Falls event detection using triaxial accelerometry and barometric pressure measurement. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 3–6 September 2009; pp. 6111–6114.
- Dadashi, F.; Mariani, B.; Rochat, S.; Büla, C.; Santos-Eggimann, B.; Aminian, K. Gait and foot clearance parameters obtained using shoe-worn inertial sensors in a large-population sample of older adults. Sensors 2014, 14, 443–457. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pogorelc, B.; Gams, M. Detecting gait-related health problems of the elderly using multidimensional dynamic time warping approach with semantic attributes. Multimed. Tools Appl. 2013, 66, 95–114. [Google Scholar] [CrossRef]
- Najafi, B.; Aminian, K.; Loew, F.; Blanc, Y.; Robert, P.A. Measurement of stand-sit and sit-stand transitions using a miniature gyroscope and its application in fall risk evaluation in the elderly. IEEE Trans. Biomed. Eng. 2002, 49, 843–851. [Google Scholar] [CrossRef] [PubMed]
- Qiang, L.; Stankovic, J.A.; Hanson, M.A.; Barth, A.T.; Lach, J.; Gang, Z. Accurate, fast fall detection using gyroscopes and accelerometer-derived posture information. In Proceedings of the Sixth International Workshop on Wearable and Implantable Body Sensor Networks, Berkeley, CA, USA, 3–5 June 2009; pp. 138–143.
- Ohtaki, Y.; Susumago, M.; Suzuki, A.; Sagawa, K.; Nagatomi, R.; Inooka, H. Automatic classification of ambulatory movements and evaluation of energy consumptions utilizing accelerometers and a barometer. Microsyst. Technol. 2005, 11, 1034–1040. [Google Scholar] [CrossRef]
- Wang, J.; Redmond, S.J.; Voleno, M.; Narayanan, M.R.; Wang, N.; Cerutti, S.; Lovell, N.H. Energy expenditure estimation during normal ambulation using triaxial accelerometry and barometric pressure. Physiol. Meas. 2012, 33, 1811–1830. [Google Scholar] [CrossRef] [PubMed]
- Altun, K.; Barshan, B. Human activity recognition using inertial/magnetic sensor units. In Human Behavior Understanding; Salah, A., Gevers, T., Sebe, N., Vinciarelli, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; Volume 6219, pp. 38–51. [Google Scholar]
- Bamberg, S.J.M.; Benbasat, A.Y.; Scarborough, D.M.; Krebs, D.E.; Paradiso, J.A. Gait analysis using a shoe-integrated wireless sensor system. IEEE Trans. Inf. Technol. Biomed. 2008, 12, 413–423. [Google Scholar] [CrossRef] [PubMed]
- Ward, J.A.; Lukowicz, P.; Troster, G.; Starner, T.E. Activity recognition of assembly tasks using body-worn microphones and accelerometers. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 1553–1567. [Google Scholar] [CrossRef] [PubMed]
- Rodríguez, D.A.; Brown, A.L.; Troped, P.J. Portable global positioning units to complement accelerometry-based physical activity monitors. Med. Sci. Sports Exerc. 2005, 37, S572–S581. [Google Scholar] [CrossRef] [PubMed]
- Ojeda, L.; Borenstein, J. Non-GPS navigation for security personnel and first responders. J. Navig. 2007, 60, 391–407. [Google Scholar] [CrossRef]
- Foxlin, E. Pedestrian tracking with shoe-mounted inertial sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef] [PubMed]
- Park, S.K.; Suh, Y.S. A zero velocity detection algorithm using inertial sensors for pedestrian navigation systems. Sensors 2010, 10, 9163–9178. [Google Scholar] [CrossRef] [PubMed]
- Smith, A. Smartphone Users Now Outnumber Users of More Basic Mobile Phones within the National Adult Population. Pew Research Center: Washington, DC, USA. Available online: http://www.pewinternet.org/2012/03/01/nearly-half-of-american-adults-are-smartphone-owners/ (accessed on 2 March 2012).
- Smith, A. Smartphone Ownership–2013 Update. Pew Research Center: Washington, DC, USA. Available online: http://www.pewinternet.org/2013/06/05/smartphone-ownership-2013/ (accessed on 6 June 2013).
- Lorig, K.R.; Sobel, D.S.; Stewart, A.L.; Brown, B.W., Jr.; Bandura, A.; Ritter, P.; Gonzalez, V.M.; Laurent, D.D.; Holman, H.R. Evidence suggesting that a chronic disease self-management program can improve health status while reducing hospitalization: A randomized trial. Med. Care 1999, 37, 5–14. [Google Scholar] [CrossRef] [PubMed]
- Chakravarthy, M.V.; Joyner, M.J.; Booth, F.W. An obligation for primary care physicians to prescribe physical activity to sedentary patients to reduce the risk of chronic health conditions. Mayo Clin. Proc. 2002, 77, 165–173. [Google Scholar] [CrossRef]
- Warburton, D.E.R.; Nicol, C.W.; Bredin, S.S.D. Health benefits of physical activity: The evidence. Can. Med. Assoc. J. 2006, 174, 801–809. [Google Scholar] [CrossRef] [PubMed]
- Nishiguchi, S.; Yamada, M.; Nagai, K.; Mori, S.; Kajiwara, Y.; Sonoda, T.; Yoshimura, K.; Yoshitomi, H.; Ito, H.; Okamoto, K.; et al. Reliability and validity of gait analysis by android-based smartphone. Telemed. e-Health 2012, 18, 292–296. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schneider, O.S.; MacLean, K.E.; Altun, K.; Karuei, I.; Wu, M.M.A. Real-time gait classification for persuasive smartphone apps: Structuring the literature and pushing the limits. In Proceedings of the 2013 International Conference on Intelligent User Interfaces, Santa Monica, CA, USA, 19–22 March 2013; pp. 161–172.
- Joundi, R.A.; Brittain, J.-S.; Jenkinson, N.; Green, A.L.; Aziz, T. Rapid tremor frequency assessment with the iPhone accelerometer. Parkinsonism Relat. Disord. 2011, 17, 288–290. [Google Scholar] [CrossRef] [PubMed]
- Guidoux, R.; Duclos, M.; Fleury, G.; Lacomme, P.; Lamaudière, N.; Manenq, P.-H.; Paris, L.; Ren, L.; Rousset, S. A smartphone-driven methodology for estimating physical activities and energy expenditure in free living conditions. J. Biomed. Inform. 2014, 52, 271–278. [Google Scholar] [CrossRef] [PubMed]
- Charlesworth, A. The ascent of smartphone. Eng. Technol. 2009, 4, 32–33. [Google Scholar] [CrossRef]
- Habib, M.; Mohktar, M.; Kamaruzzaman, S.; Lim, K.; Pin, T.; Ibrahim, F. Smartphone-based solutions for fall detection and prevention: Challenges and open issues. Sensors 2014, 14, 7181–7208. [Google Scholar] [CrossRef] [PubMed]
- Shoaib, M.; Bosch, S.; Incel, O.; Scholten, H.; Havinga, P. A survey of online activity recognition using mobile phones. Sensors 2015, 15, 2059–2085. [Google Scholar] [CrossRef] [PubMed]
- Weinberg, H. Using the ADXL202 in Pedometer and Personal Navigation Applications; Analog Devices: Norwood, MA, USA, 2002; pp. 1–8. [Google Scholar]
- Kim, J.W.; Jang, H.J.; Hwang, D.-H.; Park, C. A step, stride and heading determination for the pedestrian navigation system. J. Glob. Position. Syst. 2004, 3, 273–279. [Google Scholar] [CrossRef]
- Scarlett, J. Enhancing the Performance of Pedometers Using a Single Accelerometer; Analog Devices: Norwood, MA, USA, 2007; pp. 1–16. [Google Scholar]
- Varnfield, M.; Karunanithi, M.K.; Sarela, A.; Garcia, E.; Fairfull, A.; Oldenburg, B.F.; Walters, D.L. Uptake of a technology-assisted home-care cardiac rehabilitation program. Med. J. Aust. 2011, 194, S15–S19. [Google Scholar] [PubMed]
- Sabatini, A.; Genovese, V. A stochastic approach to noise modeling for barometric altimeters. Sensors 2013, 13, 15692–15707. [Google Scholar] [CrossRef] [PubMed]
- Falaki, H.; Mahajan, R.; Kandula, S.; Lymberopoulos, D.; Govindan, R.; Estrin, D. Diversity in smartphone usage. In Proceedings of the 8th International Conference on Mobile Systems, Applications, and Services, San Francisco, CA, USA, 15–18 June 2010; pp. 179–194.
- Carroll, A.; Heiser, G. An analysis of power consumption in a smartphone. In Proceedings of the 2010 USENIX Conference on USENIX Annual Technical Conference, Boston, MA, USA, 23–25 June 2010.
- Abdesslem, F.B.; Phillips, A.; Henderson, T. Less is more: Energy-efficient mobile sensing with senseless. In Proceedings of the 1st ACM Workshop on Networking, Systems, and Applications for Mobile Handhelds, Barcelona, Spain, 17 August 2009; pp. 61–62.
- Watzdorf, S.V.; Michahelles, F. Accuracy of positioning data on smartphones. In Proceedings of the 3rd International Workshop on Location and the Web, Tokyo, Japan, 29 November 2010; pp. 1–4.
- Zandbergen, P.A.; Barbeau, S.J. Positional accuracy of assisted GPS data from high-sensitivity GPS-enabled mobile phones. J. Navig. 2011, 64, 381–399. [Google Scholar] [CrossRef]
- Sayed, A.H.; Tarighat, A.; Khajehnouri, N. Network-based wireless location: Challenges faced in developing techniques for accurate wireless location information. IEEE Signal Proc. Mag. 2005, 22, 24–40. [Google Scholar] [CrossRef]
- Gwon, Y.; Jain, R.; Kawahara, T. Robust indoor location estimation of stationary and mobile users. In Proceedings of the Twenty-third Annual Joint Conference of the IEEE Computer and Communications Societies (INFOCOM), Hong Kong, China, 7–11 March 2004; Volume 2, pp. 1032–1043.
- Liu, J.; Chen, R.; Pei, L.; Guinness, R.; Kuusniemi, H. A hybrid smartphone indoor positioning solution for mobile LBS. Sensors 2012, 12, 17208–17233. [Google Scholar] [CrossRef] [PubMed]
- Pahlavan, K.; Krishnamurthy, P. Principles of Wireless Networks: A Unified Approach; Prentice Hall PTR: Upper Saddle River, NJ, USA, 2001; p. 600. [Google Scholar]
- Kaemarungsi, K.; Krishnamurthy, P. Analysis of WLAN’s received signal strength indication for indoor location fingerprinting. Pervasive Mob. Comput. 2012, 8, 292–316. [Google Scholar] [CrossRef]
- Schilit, B.; Hong, J.; Gruteser, M. Wireless location privacy protection. Computer 2003, 36, 135–137. [Google Scholar] [CrossRef]
- Lu, H.; Pan, W.; Lane, N.D.; Choudhury, T.; Campbell, A.T. Soundsense: Scalable sound sensing for people-centric applications on mobile phones. In Proceedings of the 7th International Conference on Mobile Systems, Applications, and Services, Kraków, Poland, 22–25 June 2009; pp. 165–178.
- Khan, A.M.; Tufail, A.; Khattak, A.M.; Laine, T.H. Activity recognition on smartphones via sensor-fusion and KDA-based SVMs. Int. J. Distrib. Sens. Netw. 2014, 2014, 1–14. [Google Scholar] [CrossRef]
- Gurrin, C.; Qiu, Z.; Hughes, M.; Caprani, N.; Doherty, A.R.; Hodges, S.E.; Smeaton, A.F. The smartphone as a platform for wearable cameras in health research. Am. J. Prev. Med. 2013, 44, 308–313. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khan, A.; Siddiqi, M.; Lee, S.-W. Exploratory data analysis of acceleration signals to select light-weight and accurate features for real-time activity recognition on smartphones. Sensors 2013, 13, 13099–13122. [Google Scholar] [CrossRef] [PubMed]
- Kangas, M.; Konttila, A.; Winblad, I.; Jamsa, T. Determination of simple thresholds for accelerometry-based parameters for fall detection. In Proceedings of the 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 22–26 August 2007; pp. 1367–1370.
- Mathie, M.J.; Coster, A.C.F.; Lovell, N.H.; Celler, B.G.; Lord, S.R.; Tiedemann, A. A pilot study of long-term monitoring of human movements in the home using accelerometry. J. Telemed. Telecare 2004, 10, 144–151. [Google Scholar] [CrossRef] [PubMed]
- Steinhoff, U.; Schiele, B. Dead reckoning from the pocket—An experimental study. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications (PerCom), Mannheim, Germany, 29 March–2 April 2010; pp. 162–170.
- Khan, A.M.; Lee, Y.K.; Lee, S.Y.; Kim, T.S. Human activity recognition via an accelerometer-enabled-smartphone using kernel discriminant analysis. In Proceedings of the 5th International Conference on Future Information Technology (FutureTech), Busan, Korea, 21–23 May 2010; pp. 1–6.
- Henpraserttae, A.; Thiemjarus, S.; Marukatat, S. Accurate activity recognition using a mobile phone regardless of device orientation and location. In Proceedings of the International Conference on Body Sensor Networks (BSN), Dallas, TX, USA, 23–25 May 2011; pp. 41–46.
- Higgins, W.T. A comparison of complementary and kalman filtering. IEEE Trans. Aerosp. Electron. Syst. 1975, AES-11, 321–325. [Google Scholar] [CrossRef]
- Sabatini, A.; Genovese, V. A sensor fusion method for tracking vertical velocity and height based on inertial and barometric altimeter measurements. Sensors 2014, 14, 13324–13347. [Google Scholar] [CrossRef] [PubMed]
- Bao, L.; Intille, S. Activity recognition from user-annotated acceleration data. In Pervasive Computing; Ferscha, A., Mattern, F., Eds.; Springer: Berlin/Heidelberg, Germany, 2004; Volume 3001, pp. 1–17. [Google Scholar]
- Shoaib, M.; Bosch, S.; Incel, O.; Scholten, H.; Havinga, P. Fusion of smartphone motion sensors for physical activity recognition. Sensors 2014, 14, 10146–10176. [Google Scholar] [CrossRef] [PubMed]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-up robust features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Milette, G.; Stroud, A. Professional Android Sensor Programming; John Wiley & Sons: Indianapolis, IN, USA, 2012. [Google Scholar]
- Saunders, J. Real-time discrimination of broadcast speech/music. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Atlanta, GA, USA, 7–10 March 1996; Volume 2, pp. 993–996.
- Eronen, A.J.; Peltonen, V.T.; Tuomi, J.T.; Klapuri, A.P.; Fagerlund, S.; Sorsa, T.; Lorho, G.; Huopaniemi, J. Audio-based context recognition. IEEE Trans. Audio Speech Lang. Process. 2006, 14, 321–329. [Google Scholar] [CrossRef]
- Ravi, N.; Dandekar, N.; Mysore, P.; Littman, M.L. Activity recognition from accelerometer data. In Proceedings of the 17th Conference on Innovative Applications of Artificial Intelligence, Pittsburgh, PA, USA, 9–13 July 2005; Volume 3, pp. 1541–1546.
- Huynh, T.; Schiele, B. Analyzing features for activity recognition. In Proceedings of the 2005 Joint Conference on Smart Objects and Ambient Intelligence: Innovative Context-aware Services: Usages and Technologies, Grenoble, France, 12–14 October 2005; pp. 159–163.
- He, Z.; Jin, L. Activity recognition from acceleration data based on discrete consine transform and SVM. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, SMC, San Antonio, TX, USA, 11–14 October 2009; pp. 5041–5044.
- Scheirer, E.; Slaney, M. Construction and evaluation of a robust multifeature speech/music discriminator. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Munich, Germany, 21–24 April 1997; Volume 2, pp. 1331–1334.
- Li, D.; Sethi, I.K.; Dimitrova, N.; McGee, T. Classification of general audio data for content-based retrieval. Pattern Recognit. Lett. 2001, 22, 533–544. [Google Scholar] [CrossRef]
- Dixon, S. Onset detection revisited. In Proceedings of the 9th International Conference on Digital Audio Effects, Montreal, QC, Canada, 18–20 September 2006; Volume 120, pp. 133–137.
- Chen, Y.-P.; Yang, J.-Y.; Liou, S.-N.; Lee, G.-Y.; Wang, J.-S. Online classifier construction algorithm for human activity detection using a tri-axial accelerometer. Appl. Math. Comput. 2008, 205, 849–860. [Google Scholar] [CrossRef]
- He, Y.; Li, Y. Physical activity recognition utilizing the built-in kinematic sensors of a smartphone. Int. J. Distrib. Sens. Netw. 2013, 2013, 1–10. [Google Scholar] [CrossRef]
- Maurer, U.; Rowe, A.; Smailagic, A.; Siewiorek, D. Location and activity recognition using ewatch: A wearable sensor platform. In Ambient Intelligence in Everyday Life; Cai, Y., Abascal, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; Volume 3864, pp. 86–102. [Google Scholar]
- Parkka, J.; Ermes, M.; Korpipaa, P.; Mantyjarvi, J.; Peltola, J.; Korhonen, I. Activity classification using realistic data from wearable sensors. IEEE Trans. Inf. Technol. Biomed. 2006, 10, 119–128. [Google Scholar] [CrossRef] [PubMed]
- Moncada-Torres, A.; Leuenberger, K.; Gonzenbach, R.; Luft, A.; Gassert, R. Activity classification based on inertial and barometric pressure sensors at different anatomical locations. Physiol. Meas. 2014, 35. [Google Scholar] [CrossRef] [PubMed]
- Trevor, H.; Robert, T.; Jerome, F. The Elements of Statistical Learning: Data Mining, Inference and Prediction; Springer-Verlag: New York, NY, USA, 2001; Volume 1, pp. 371–406. [Google Scholar]
- Schaffer, C. Overfitting avoidance as bias. Mach. Learn. 1993, 10, 153–178. [Google Scholar] [CrossRef]
- Capela, N.A.; Lemaire, E.D.; Baddour, N. Feature selection for wearable smartphone-based human activity recognition with able bodied, elderly, and stroke patients. PLoS ONE 2015, 10. [Google Scholar] [CrossRef] [PubMed]
- Huan, L.; Lei, Y. Toward integrating feature selection algorithms for classification and clustering. IEEE Trans. Knowl. Data Eng. 2005, 17, 491–502. [Google Scholar] [CrossRef]
- Hall, M.; Frank, E.; Holmes, G.; Pfahringer, B.; Reutemann, P.; Witten, I.H. The WEKA data mining software: An update. SIGKDD Explor. Newsl. 2009, 11, 10–18. [Google Scholar] [CrossRef]
- Witten, I.H.; Frank, E.; Hall, M.A. Data Mining: Practical Machine Learning Tools and Techniques, 3rd ed.; Morgan Kaufmann: Amsterdam, The Netherlands, 2011. [Google Scholar]
- Preece, S.J.; Goulermas, J.Y.; Kenney, L.P.J.; Howard, D.; Meijer, K.; Crompton, R. Activity identification using body-mounted sensors—A review of classification techniques. Physiol. Meas. 2009, 30. [Google Scholar] [CrossRef] [PubMed]
- Efron, B.; Tibshirani, R. Improvements on cross-validation: The 632+ bootstrap method. J. Am. Stat. Assoc. 1997, 92, 548–560. [Google Scholar]
- Marshall, J. Smartphone sensing for distributed swim stroke coaching and research. In Proceedings of the 2013 ACM Conference on Pervasive and Ubiquitous Computing Adjunct Publication, Zurich, Switzerland, 8–12 September 2013; pp. 1413–1416.
- Mitchell, E.; Monaghan, D.; Connor, N. Classification of sporting activities using smartphone accelerometers. Sensors 2013, 13, 5317–5337. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kranz, M.; Möller, A.; Hammerla, N.; Diewald, S.; Plötz, T.; Olivier, P.; Roalter, L. The mobile fitness coach: Towards individualized skill assessment using personalized mobile devices. Pervasive Mob. Comput. 2013, 9, 203–215. [Google Scholar] [CrossRef]
- Muehlbauer, M.; Bahle, G.; Lukowicz, P. What can an arm holster worn smart phone do for activity recognition? In Proceedings of the 15th Annual International Symposium on Wearable Computers (ISWC), San Francisco, CA, USA, 12–15 June 2011; pp. 79–82.
- Antos, S.A.; Albert, M.V.; Kording, K.P. Hand, belt, pocket or bag: Practical activity tracking with mobile phones. J. Neurosci. Methods 2014, 231, 22–30. [Google Scholar] [CrossRef] [PubMed]
- Gietzelt, M.; Nemitz, G.; Wolf, K.-H.; Meyer Zu Schwabedissen, H.; Haux, R.; Marschollek, M. A clinical study to assess fall risk using a single waist accelerometer. Inform. Health Soc. Care 2009, 34, 181–188. [Google Scholar] [CrossRef] [PubMed]
- Tacconi, C.; Mellone, S.; Chiari, L. Smartphone-based applications for investigating falls and mobility. In Proceedings of the 5th International Conference on Pervasive Computing Technologies for Healthcare (PervasiveHealth), TBD Dublin, Ireland, 23–26 May 2011; pp. 258–261.
- Zhang, S.; McCullagh, P.; Nugent, C.; Zheng, H. Activity monitoring using a smart phone’s accelerometer with hierarchical classification. In Proceedings of the Sixth International Conference on Intelligent Environments (IE), Lumpur, Malaysia, 19–21 July 2010; pp. 158–163.
- Anguita, D.; Ghio, A.; Oneto, L.; Parra, X.; Reyes-Ortiz, J.L. Human activity recognition on smartphones using a multiclass hardware-friendly support vector machine. Ambient Assist. Living Home Care 2012, 7657, 216–223. [Google Scholar]
- Aguiar, B.; Silva, J.; Rocha, T.; Carneiro, S.; Sousa, I. Monitoring physical activity and energy expenditure with smartphones. In Proceedings of the IEEE-EMBS International Conference on Biomedical and Health Informatics (BHI), Valencia, Spain, 1–4 June 2014; pp. 664–667.
- Becker, C.; Schwickert, L.; Mellone, S.; Bagalà, F.; Chiari, L.; Helbostad, J.L.; Zijlstra, W.; Aminian, K.; Bourke, A.; Todd, C.; et al. Proposal for a multiphase fall model based on real-world fall recordings with body-fixed sensors. Z. Gerontol. Geriatr. 2012, 45, 707–715. [Google Scholar] [CrossRef] [PubMed]
- Pernek, I.; Hummel, K.; Kokol, P. Exercise repetition detection for resistance training based on smartphones. Pers. Ubiquit. Comput. 2013, 17, 771–782. [Google Scholar] [CrossRef]
- Stöggl, T.; Holst, A.; Jonasson, A.; Andersson, E.; Wunsch, T.; Norström, C.; Holmberg, H.-C. Automatic classification of the sub-techniques (gears) used in cross-country ski skating employing a mobile phone. Sensors 2014, 14, 20589–20601. [Google Scholar] [CrossRef] [PubMed]
- Mellone, S.; Tacconi, C.; Schwickert, L.; Klenk, J.; Becker, C.; Chiari, L. Smartphone-based solutions for fall detection and prevention: The farseeing approach. Z. Gerontol. Geriatr. 2012, 45, 722–727. [Google Scholar] [CrossRef] [PubMed]
- Albert, M.V.; Toledo, S.; Shapiro, M.; Kording, K. Using mobile phones for activity recognition in Parkinson’s patients. Front. Neurol. 2012, 3, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Pei, L.; Guinness, R.; Chen, R.; Liu, J.; Kuusniemi, H.; Chen, Y.; Chen, L.; Kaistinen, J. Human behavior cognition using smartphone sensors. Sensors 2013, 13, 1402–1424. [Google Scholar] [CrossRef] [PubMed]
- Del Rosario, M.B.; Wang, K.; Wang, J.; Liu, Y.; Brodie, M.; Delbaere, K.; Lovell, N.H.; Lord, S.R.; Redmond, S.J. A comparison of activity classification in younger and older cohorts using a smartphone. Physiol. Meas. 2014, 35. [Google Scholar] [CrossRef] [PubMed]
- Varnfield, M.; Karunanithi, M.; Lee, C.-K.; Honeyman, E.; Arnold, D.; Ding, H.; Smith, C.; Walters, D.L. Smartphone-based home care model improved use of cardiac rehabilitation in postmyocardial infarction patients: Results from a randomised controlled trial. Heart 2014. [Google Scholar] [CrossRef] [PubMed]
- Bylemans, I.; Weyn, M.; Klepal, M. Mobile phone-based displacement estimation for opportunistic localisation systems. In Proceedings of the Third International Conference on Mobile Ubiquitous Computing, Systems, Services and Technologies, Sliema, Malta, 11–16 October 2009; pp. 113–118.
- Pratama, A.R.; Hidayat, R. Smartphone-based pedestrian dead reckoning as an indoor positioning system. In Proceedings of the International Conference on System Engineering and Technology (ICSET), Bandung, Indonesia, 11–12 September 2012; pp. 1–6.
- Ayub, S.; Zhou, X.; Honary, S.; Bahraminasab, A.; Honary, B. Indoor pedestrian displacement estimation using smart phone inertial sensors. Int. J. Innov. Comput. Appl. 2012, 4, 35–42. [Google Scholar] [CrossRef]
- Pate, R.R.; Pratt, M.; Blair, S.N.; Haskell, W.L.; Macera, C.A.; Bouchard, C.; Buchner, D.; Ettinger, W.; Heath, G.W.; King, A.C.; et al. Physical activity and public health: A recommendation from the centers for disease control and prevention and the American college of sports medicine. JAMA 1995, 273, 402–407. [Google Scholar] [CrossRef] [PubMed]
- Salarian, A.; Horak, F.B.; Zampieri, C.; Carlson-Kuhta, P.; Nutt, J.G.; Aminian, K. Itug, a sensitive and reliable measure of mobility. IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 18, 303–310. [Google Scholar] [CrossRef] [PubMed]
- Zampieri, C.; Salarian, A.; Carlson-Kuhta, P.; Aminian, K.; Nutt, J.G.; Horak, F.B. The instrumented timed up and go test: Potential outcome measure for disease modifying therapies in Parkinson’s disease. J. Neurol. Neurosurg. Psychiatry 2010, 81, 171–176. [Google Scholar] [CrossRef] [PubMed]
- Spain, R.I.; St. George, R.J.; Salarian, A.; Mancini, M.; Wagner, J.M.; Horak, F.B.; Bourdette, D. Body-worn motion sensors detect balance and gait deficits in people with multiple sclerosis who have normal walking speed. Gait Posture 2012, 35, 573–578. [Google Scholar] [CrossRef] [PubMed]
- Hsieh, S.-L.; Su, M.H.; Liu, L.F.; Jiang, W.-W. A finite state machine-based fall detection mechanism on smartphones. In Proceedings of the 9th International Conference on Ubiquitous Intelligence & Computing and 9th International Conference on Autonomic & Trusted Computing (UIC/ATC), Fukuoka, Japan, 4–7 September 2012; pp. 735–739.
- Anjum, A.; Ilyas, M.U. Activity recognition using smartphone sensors. In Proceedings of the IEEE Consumer Communications and Networking Conference, Las Vegas, NV, USA, 11–14 January 2013; pp. 914–919.
- Hamburg, N.M.; McMackin, C.J.; Huang, A.L.; Shenouda, S.M.; Widlansky, M.E.; Schulz, E.; Gokce, N.; Ruderman, N.B.; Keaney, J.F., Jr.; Vita, J.A. Physical inactivity rapidly induces insulin resistance and microvascular dysfunction in healthy volunteers. Arterioscler. Thromb. Vasc. Biol. 2007, 27, 2650–2656. [Google Scholar] [CrossRef] [PubMed]
- Hamilton, M.T.; Healy, G.N.; Dunstan, D.W.; Zderic, T.W.; Owen, N. Too little exercise and too much sitting: Inactivity physiology and the need for new recommendations on sedentary behavior. Curr. Cardio Risk Rep. 2008, 2, 292–298. [Google Scholar] [CrossRef] [PubMed]
- Katzmarzyk, P.T.; Church, T.S.; Craig, C.L.; Bouchard, C. Sitting time and mortality from all causes, cardiovascular disease, and cancer. Med. Sci. Sports Exerc. 2009, 41, 998–1005. [Google Scholar] [CrossRef] [PubMed]
- Duvivier, B.M.F.M.; Schaper, N.C.; Bremers, M.A.; van Crombrugge, G.; Menheere, P.P.C.A.; Kars, M.; Savelberg, H.H.C.M. Minimal intensity physical activity (standing and walking) of longer duration improves insulin action and plasma lipids more than shorter periods of moderate to vigorous exercise (cycling) in sedentary subjects when energy expenditure is comparable. PLoS ONE 2013, 8. [Google Scholar] [CrossRef] [PubMed]
- Teh, K.C.; Aziz, A.R. Heart rate, oxygen uptake, and energy cost of ascending and descending the stairs. Med. Sci. Sports Exerc. 2002, 34, 695–699. [Google Scholar] [CrossRef] [PubMed]
- Lu, H.; Yang, J.; Liu, Z.; Lane, N.D.; Choudhury, T.; Campbell, A.T. The jigsaw continuous sensing engine for mobile phone applications. In Proceedings of the 8th ACM Conference on Embedded Networked Sensor Systems, Zurich, Switzerland, 3–5 November 2010; pp. 71–84.
- Han, M.; Vinh, L.T.; Lee, Y.-K.; Lee, S. Comprehensive context recognizer based on multimodal sensors in a smartphone. Sensors 2012, 12, 12588–12605. [Google Scholar] [CrossRef]
- Sun, L.; Zhang, D.; Li, B.; Guo, B.; Li, S. Activity recognition on an accelerometer embedded mobile phone with varying positions and orientations. In Ubiquitous Intelligence and Computing; Yu, Z., Liscano, R., Chen, G., Zhang, D., Zhou, X., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; Volume 6406, pp. 548–562. [Google Scholar]
- Thiemjarus, S.; Henpraserttae, A.; Marukatat, S. A study on instance-based learning with reduced training prototypes for device-context-independent activity recognition on a mobile phone. In Proceedings of the IEEE International Conference on Body Sensor Networks (BSN), Cambridge, MA, USA, 6–9 May 2013; pp. 1–6.
- Wang, R.; Chen, F.; Chen, Z.; Li, T.; Harari, G.; Tignor, S.; Zhou, X.; Ben-Zeev, D.; Campbell, A.T. Studentlife: Assessing mental health, academic performance and behavioral trends of college students using smartphones. In Proceedings of the ACM International Joint Conference on Pervasive and Ubiquitous Computing, Seattle, WA, USA, 13–17 September 2014; pp. 3–14.
- Lane, N.D.; Mohammod, M.; Lin, M.; Yang, X.; Lu, H.; Ali, S.; Doryab, A.; Berke, E.; Choudhury, T.; Campbell, A. Bewell: A smartphone application to monitor, model and promote wellbeing. In Proceedings of the 5th International ICST Conference on Pervasive Computing Technologies for Healthcare, Dublin, Ireland, 23–26 May 2011; pp. 23–26.
- Rahmati, A.; Qian, A.; Zhong, L. Understanding human-battery interaction on mobile phones. In Proceedings of the 9th International Conference on Human Computer Interaction with Mobile Devices and Services 2007, Singapore, 11–14 September 2007; pp. 265–272.
- Ferreira, D.; Dey, A.; Kostakos, V. Understanding human-smartphone concerns: A study of battery life. In Pervasive Computing; Lyons, K., Hightower, J., Huang, E., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; Volume 6696, pp. 19–33. [Google Scholar]
- Perrucci, G.P.; Fitzek, F.H.P.; Sasso, G.; Kellerer, W.; Widmer, J. On the impact of 2G and 3G network usage for mobile phones’ battery life. In Proceedings of the European Wireless Conference, Aalborg, Denmark, 17–20 May 2009; pp. 255–259.
- Han, M.; Bang, J.; Nugent, C.; McClean, S.; Lee, S. A lightweight hierarchical activity recognition framework using smartphone sensors. Sensors 2014, 14, 16181–16195. [Google Scholar] [CrossRef] [PubMed]
- Kansiz, A.O.; Guvensan, M.A.; Turkmen, H.I. Selection of time-domain features for fall detection based on supervised learning. In Proceedings of the World Congress on Engineering and Computer Science, San Francisco, CA, USA, 23–25 October 2013; pp. 23–25.
- Guiry, J.J.; van de Ven, P.; Nelson, J.; Warmerdam, L.; Riper, H. Activity recognition with smartphone support. Med. Eng. Phys. 2014, 36, 670–675. [Google Scholar] [CrossRef] [PubMed]
- Bassett, D.R., Jr.; Ainsworth, B.E.; Swartz, A.M.; Strath, S.J.; O’Brien, W.L.; King, G.A. Validity of four motion sensors in measuring moderate intensity physical activity. Med. Sci. Sports Exerc. 2000, 32, S471–S480. [Google Scholar] [CrossRef] [PubMed]
- Hendelman, D.; Miller, K.; Baggett, C.; Debold, E.; Freedson, P. Validity of accelerometry for the assessment of moderate intensity physical activity in the field. Med. Sci. Sports Exerc. 2000, 32, S442–S449. [Google Scholar] [CrossRef] [PubMed]
- Yanyan, Z.; Baldwin, J.; Antunna, L.; Yazir, Y.O.; Ganti, S.; Coady, Y. Tradeoffs in cross platform solutions for mobile assistive technology. In Proceedings of the IEEE Pacific Rim Conference on Communications, Computers and Signal Processing (PACRIM), University of Victoria, Victoria, BC, Canada, 27–29 August 2013; pp. 330–335.
- Apple Inc. App Programming Guide for iOS; Apple Inc.: Cupertino, CA, USA, 2014; p. 119. [Google Scholar]
- Bagalà, F.; Becker, C.; Cappello, A.; Chiari, L.; Aminian, K.; Hausdorff, J.M.; Zijlstra, W.; Klenk, J. Evaluation of accelerometer-based fall detection algorithms on real-world falls. PLoS ONE 2012, 7. [Google Scholar] [CrossRef] [PubMed]
- Majumder, A.J.A.; Rahman, F.; Zerin, I.; William Ebel, J.; Ahamed, S.I. iPrevention: Towards a novel real-time smartphone-based fall prevention system. In Proceedings of the 28th Annual ACM Symposium on Applied Computing, Coimbra, Portugal, 18–22 March 2013; pp. 513–518.
- Ainsworth, B.E.; Haskell, W.L.; Herrmann, S.D.; Meckes, N.; Bassett, D.R., Jr.; Tudor-Locke, C.; Greer, J.L.; Vezina, J.; Whitt-Glover, M.C.; Leon, A.S. 2011 compendium of physical activities: A second update of codes and MET values. Med. Sci. Sports Exerc. 2011, 43, 1575–1581. [Google Scholar] [CrossRef] [PubMed]
- Lamonaca, F.; Kurylyak, Y.; Grimaldi, D.; Spagnuolo, V. Reliable pulse rate evaluation by smartphone. In Proceedings of the IEEE International Symposium on Medical Measurements and Applications Proceedings (MeMeA), Budapest, Hungary, 18–19 May 2012; pp. 1–4.
- Lazaro, J.; Yunyoung, N.; Gil, E.; Laguna, P.; Chon, K.H. Smartphone-camera-acquired pulse photoplethysmographic signal for deriving respiratory rate. In Proceedings of the Conference of the European Study Group on Cardiovascular Oscillations (ESGCO), Trento, Fai della Paganella, Italy, 25–28 May 2014; pp. 121–122.
- Raab, F.H.; Blood, E.B.; Steiner, T.O.; Jones, H.R. Magnetic position and orientation tracking system. IEEE Trans. Aerosp. Electron. Syst. 1979, AES-15, 709–718. [Google Scholar] [CrossRef]
- Apple Inc. Health—An Entirely New Way to Use Your Health and Fitness Information. Available online: https://www.apple.com/au/ios/whats-new/health/ (accessed on 27 July 2015).
- Samsung Electronics Co., L. Samsung Digital Health. Available online: http://developer.samsung.com/health (accessed on 27 July 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Del Rosario, M.B.; Redmond, S.J.; Lovell, N.H. Tracking the Evolution of Smartphone Sensing for Monitoring Human Movement. Sensors 2015, 15, 18901-18933. https://doi.org/10.3390/s150818901
Del Rosario MB, Redmond SJ, Lovell NH. Tracking the Evolution of Smartphone Sensing for Monitoring Human Movement. Sensors. 2015; 15(8):18901-18933. https://doi.org/10.3390/s150818901
Chicago/Turabian StyleDel Rosario, Michael B., Stephen J. Redmond, and Nigel H. Lovell. 2015. "Tracking the Evolution of Smartphone Sensing for Monitoring Human Movement" Sensors 15, no. 8: 18901-18933. https://doi.org/10.3390/s150818901