We conduct both computer simulation and practical experiments to evaluate the effectiveness and performance of the proposed system, and they are illustrated in the following subsections. We utilized computer simulation to investigate the quality of the algorithm when less than four satellites are tracked and guide the design of real tests in advance. Furthermore, we conducted land-based vehicle driving tests for verification.
7.2. Simulation Experiment
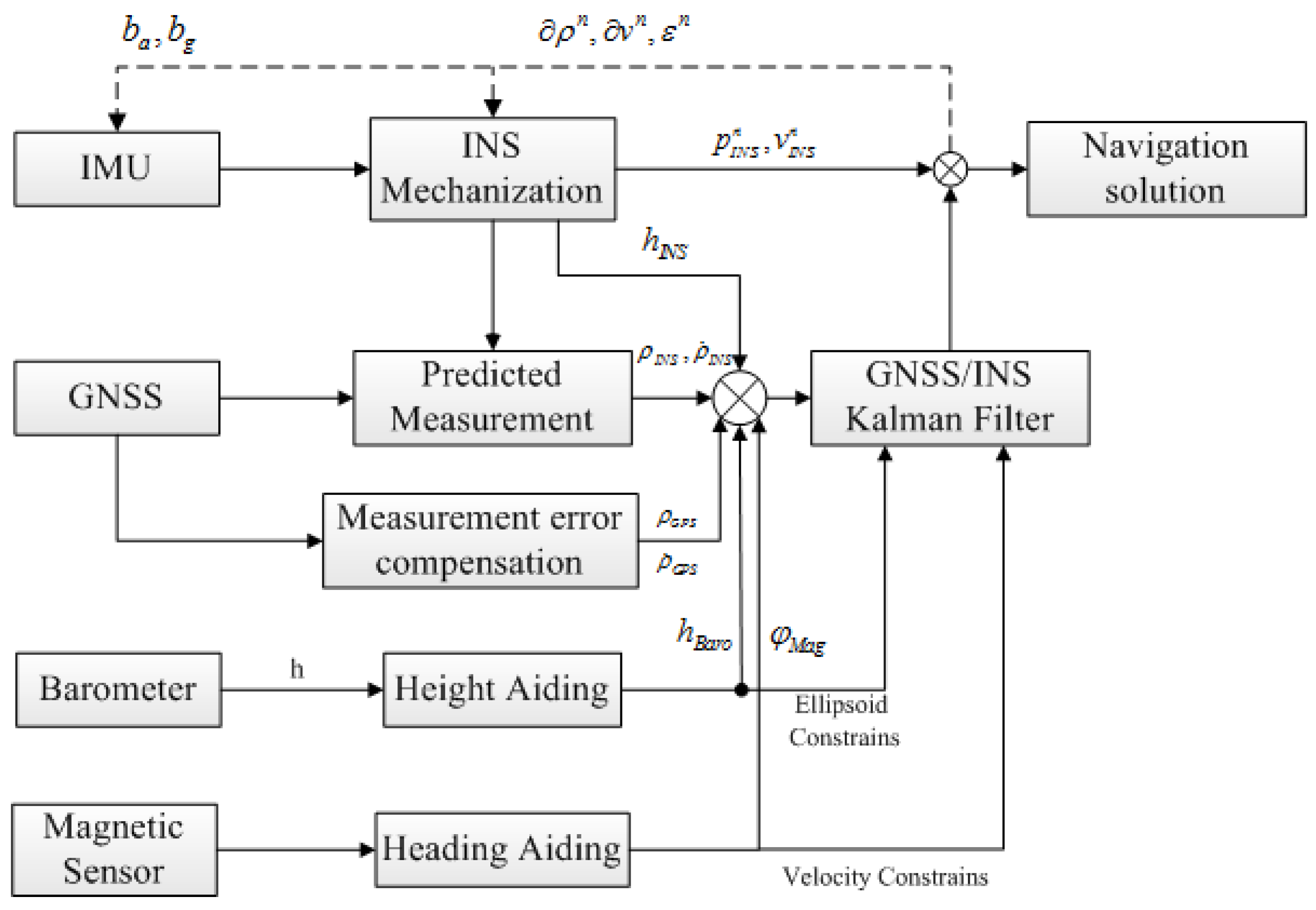
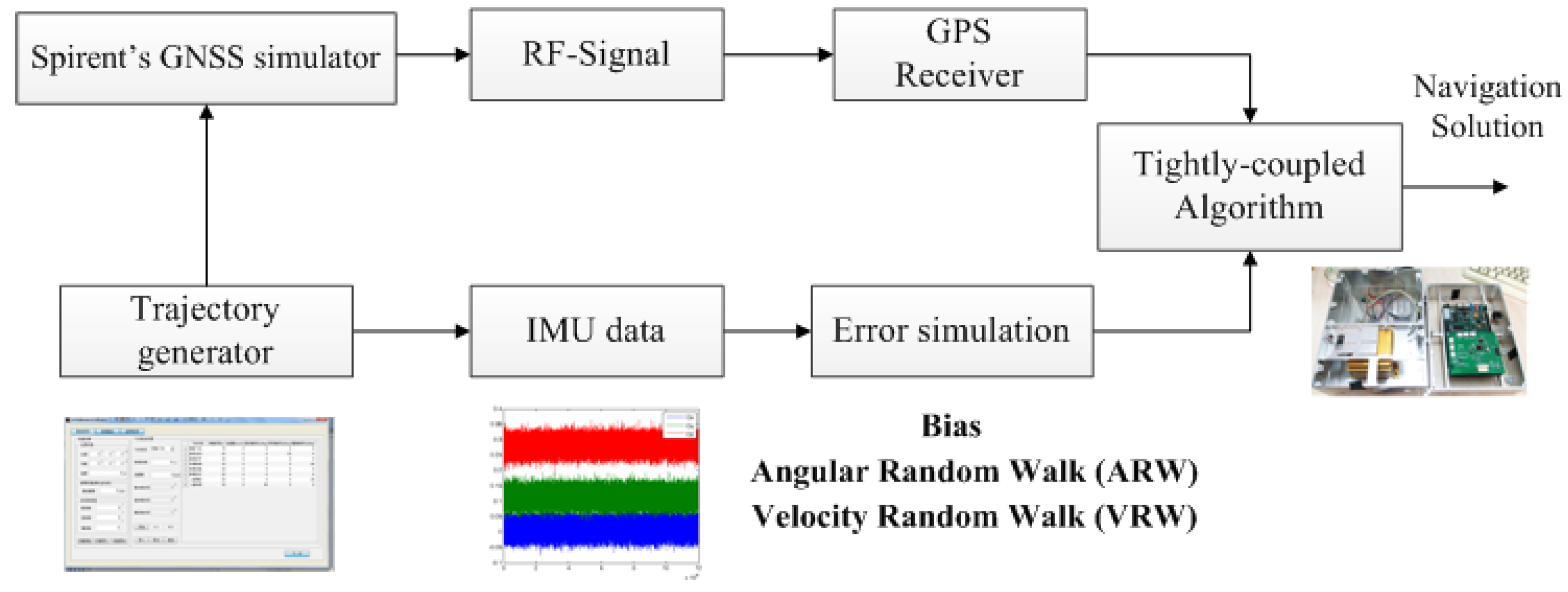
The benefit of simulation experiments is that the specific test scenarios can be created by software; therefore, it is feasible to obtain the true values to compare with system solutions for algorithm evaluation. The block diagram of the simulation process is shown in
Figure 6. A trajectory generator was employed to produce the desired test trajectory and corresponding true IMU data. Then, errors, such as bias, random walk and scale factor errors, were added into the true IMU data to mimic the measured IMU data. Meanwhile, the generated trajectory file was imported into the Spirent GNSS simulator software suite SimGEN™ (Spirent Company, Sunnyvale, CA, USA) to simulate the GNSS data. Finally, the GNSS output was collected and integrated with IMU data for the navigation solution.
Figure 6.
Simulation experiment scheme.
Figure 6.
Simulation experiment scheme.
The simulated trajectory is shown in
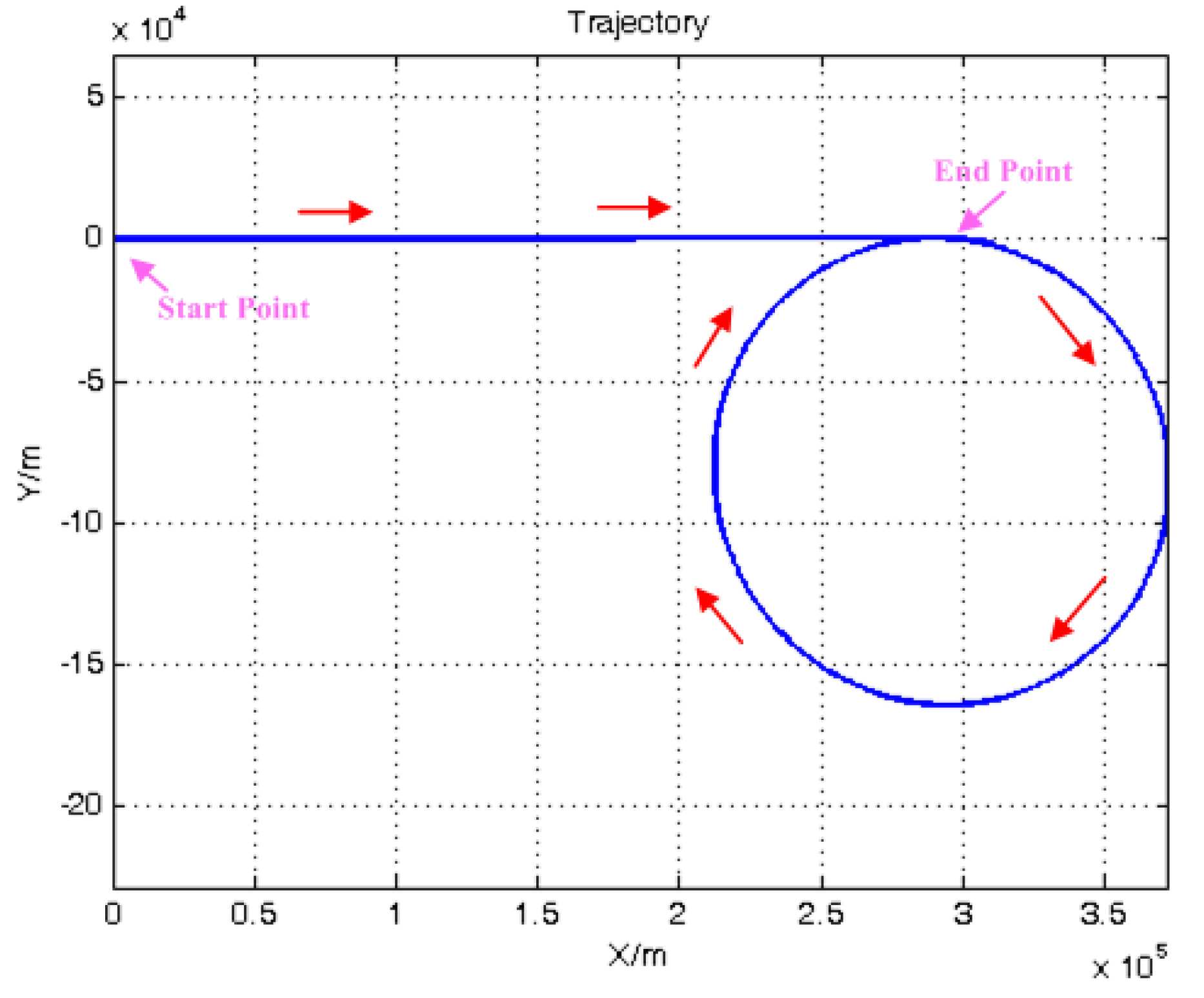
Figure 6. This trail consisted of three stages, including linear motion with a constant acceleration, uniform linear motion and turning with a constant angular velocity. The satellite visible number was adjusted to less than four randomly in the navigation process through the SimGEN ™ software by turning off some satellite channels. The simulated gyroscope biases were set as 10°/h, and the angular random walk was 20
, while the accelerometer biases and velocity random walk were set as 1 mg and 1
, respectively. Meanwhile, the simulated height and heading were generated by adding Gaussian distributed noises to the true values.
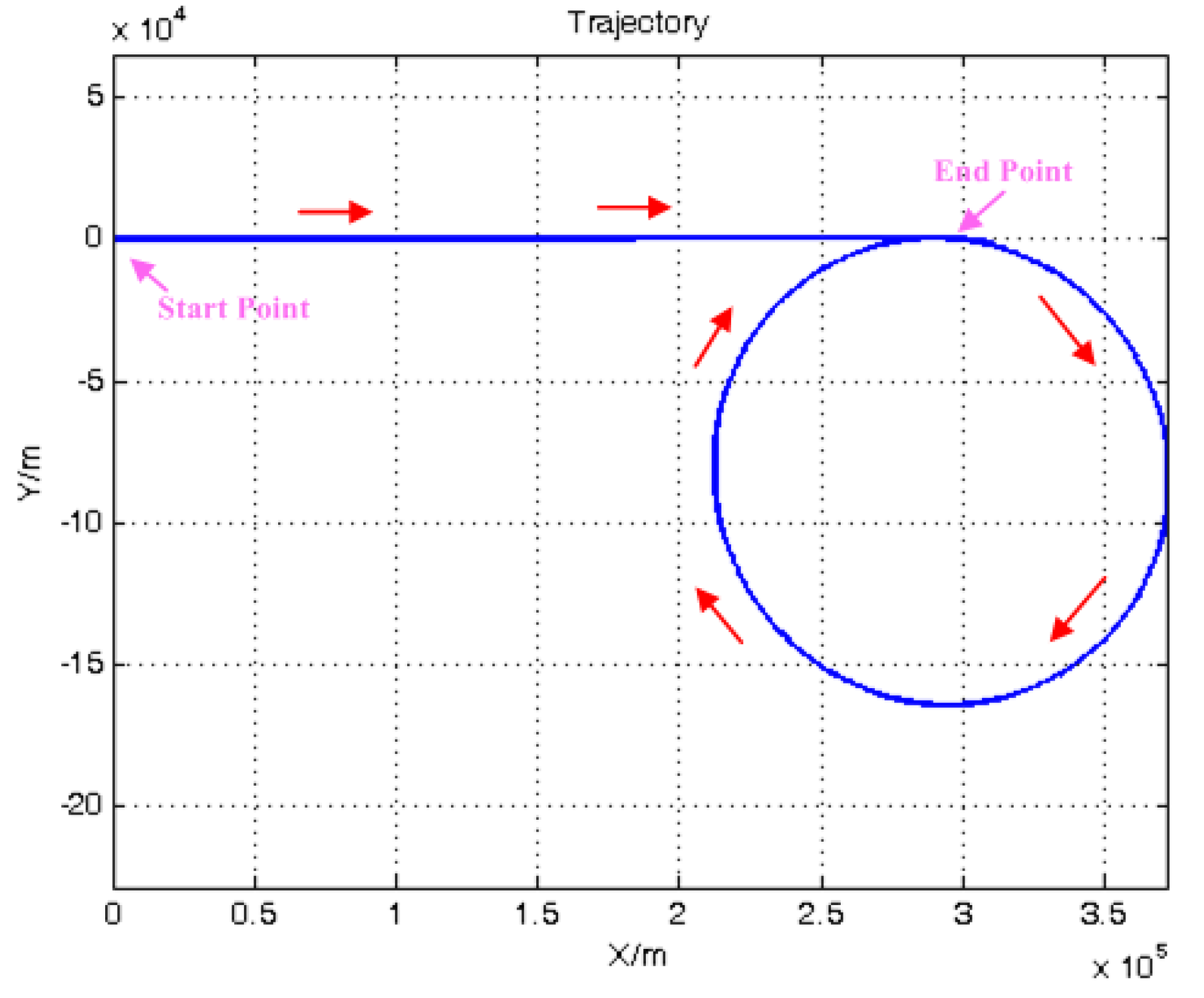
Figure 7 shows the flight trajectory, and the red arrows show the flight directions. The trajectory is shown in meters scale, and the start point is set as (0, 0). The simulated data are processed with the standard TC, TCA, TCA with SG and ATCA previously discussed for performance evaluation. The initial values of the filters are set the same to assess the navigation solution in the same situation, and the parameters configurations are listed as follows:
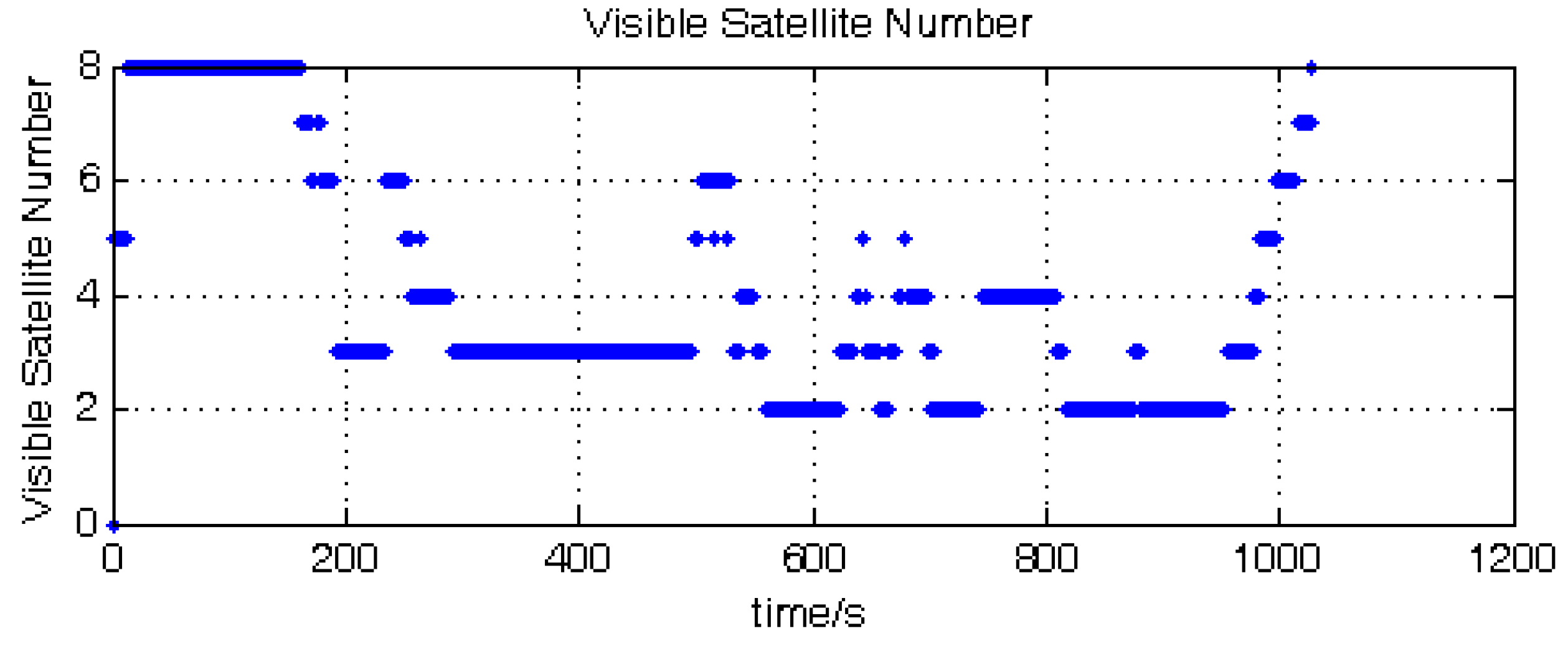
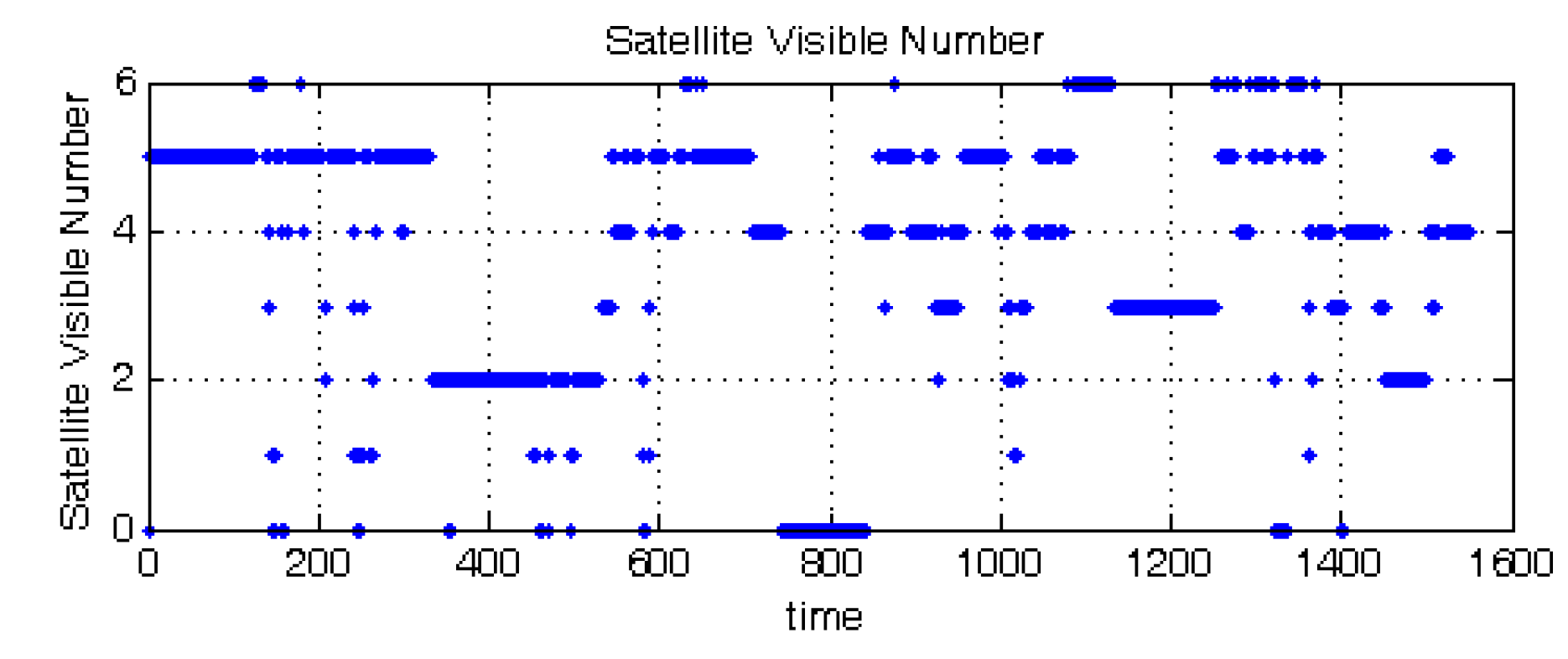
The simulation experiment lasted 1020 s, and during this process, the visible satellite number is randomly changed through the SimGen™ software. The satellite visible number is shown in
Figure 8. The position results of GNSS receiver and the four compared tightly-coupled algorithms are shown in
Figure 9.
Figure 7.
Simulated trajectory.
Figure 7.
Simulated trajectory.
Figure 8.
Satellite visible number.
Figure 8.
Satellite visible number.
Figure 9 shows the position error in the ECEF (Earth-Centered, Earth-Fixed) frame of the GNSS receiver and the four compared tight-coupled methods.
Figure 9a denotes the GNSS receiver position error; it can be seen that the receiver has no position output in some periods, because the satellite number is below four.
Figure 9b–e denotes the position errors of standard TC, TCA, TCA with SG and ATCA.
Table 2 lists the RMS position error results of the GNSS receiver and the compared tightly-coupled algorithms, where it includes the periods that the satellite visible number is more than four and less than four in the whole experiment. It is obvious that the proposed ATCA algorithm has the least position error overall no matter the satellite visible number being more than four or less than four. In order to further evaluate the proposed method, we also selected four periods in this experiment to compare the position error and to see more details.
Table 2.
RMS position error result.
Table 2.
RMS position error result.
| | Satellite Number More than 4 | Satellite Number Less than 4 |
|---|
| X (m) | Y (m) | Z (m) | X (m) | Y (m) | Z (m) |
|---|
| GNSS receiver | 12.1204 | 19.7539 | 26.4187 | NA | NA | NA |
| Standard TC | 10.4966 | 14.4910 | 24.6421 | 778.5215 | 456.6524 | 643.8866 |
| TCA | 10.0638 | 9.7813 | 13.5467 | 33.3155 | 27.1117 | 26.2960 |
| TCA with SG | 7.9877 | 11.8187 | 11.7559 | 13.0102 | 11.0251 | 24.4045 |
| ATCA | 5.4093 | 9.6268 | 8.2195 | 10.0279 | 8.8454 | 13.3769 |
Figure 9.
Position errors of different methods: (a) GNSS receiver error; (b) standard TC position error; (c) TCA position error; (d) TCA with SG position error; (e) ATCA position error.
Figure 9.
Position errors of different methods: (a) GNSS receiver error; (b) standard TC position error; (c) TCA position error; (d) TCA with SG position error; (e) ATCA position error.
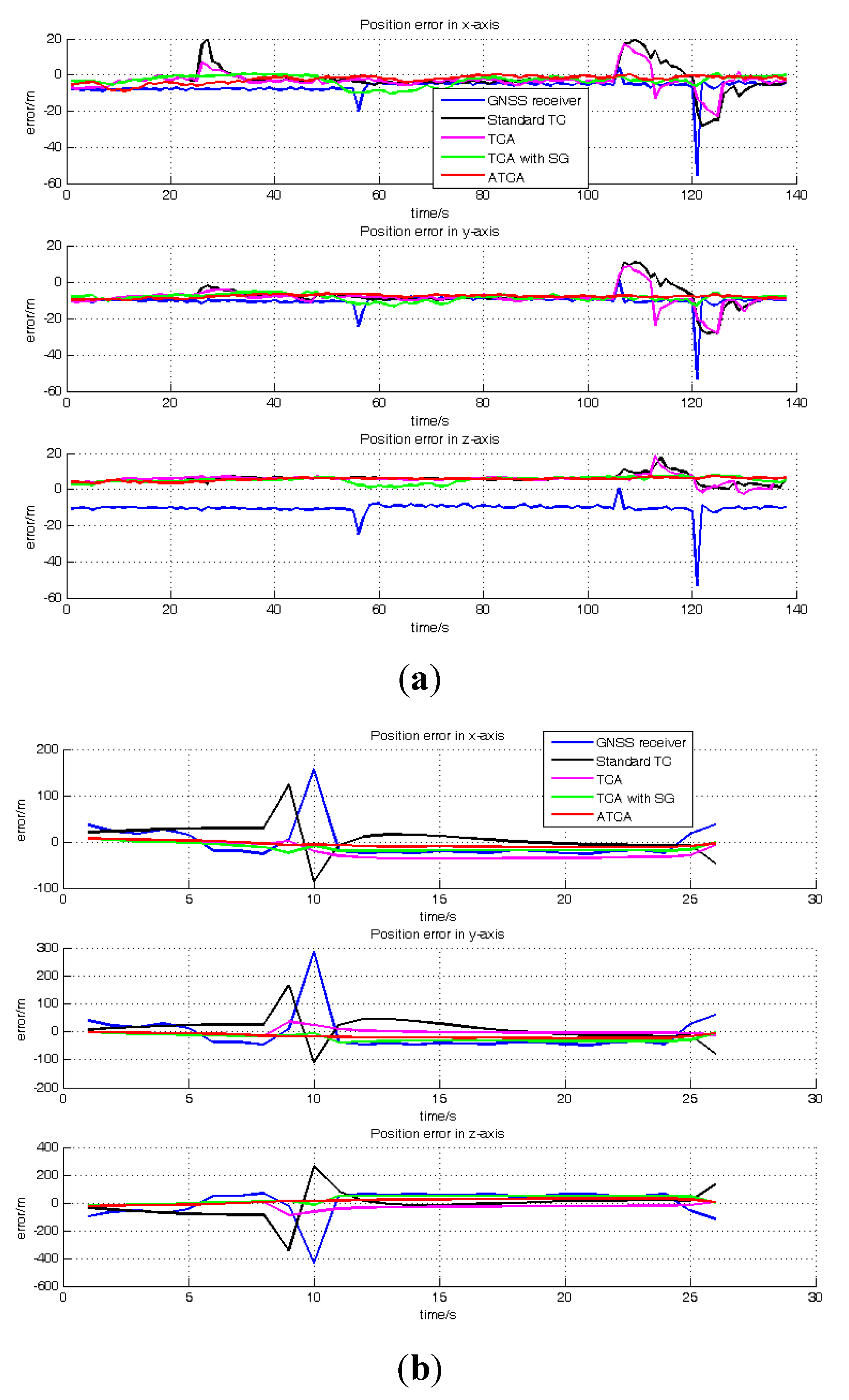
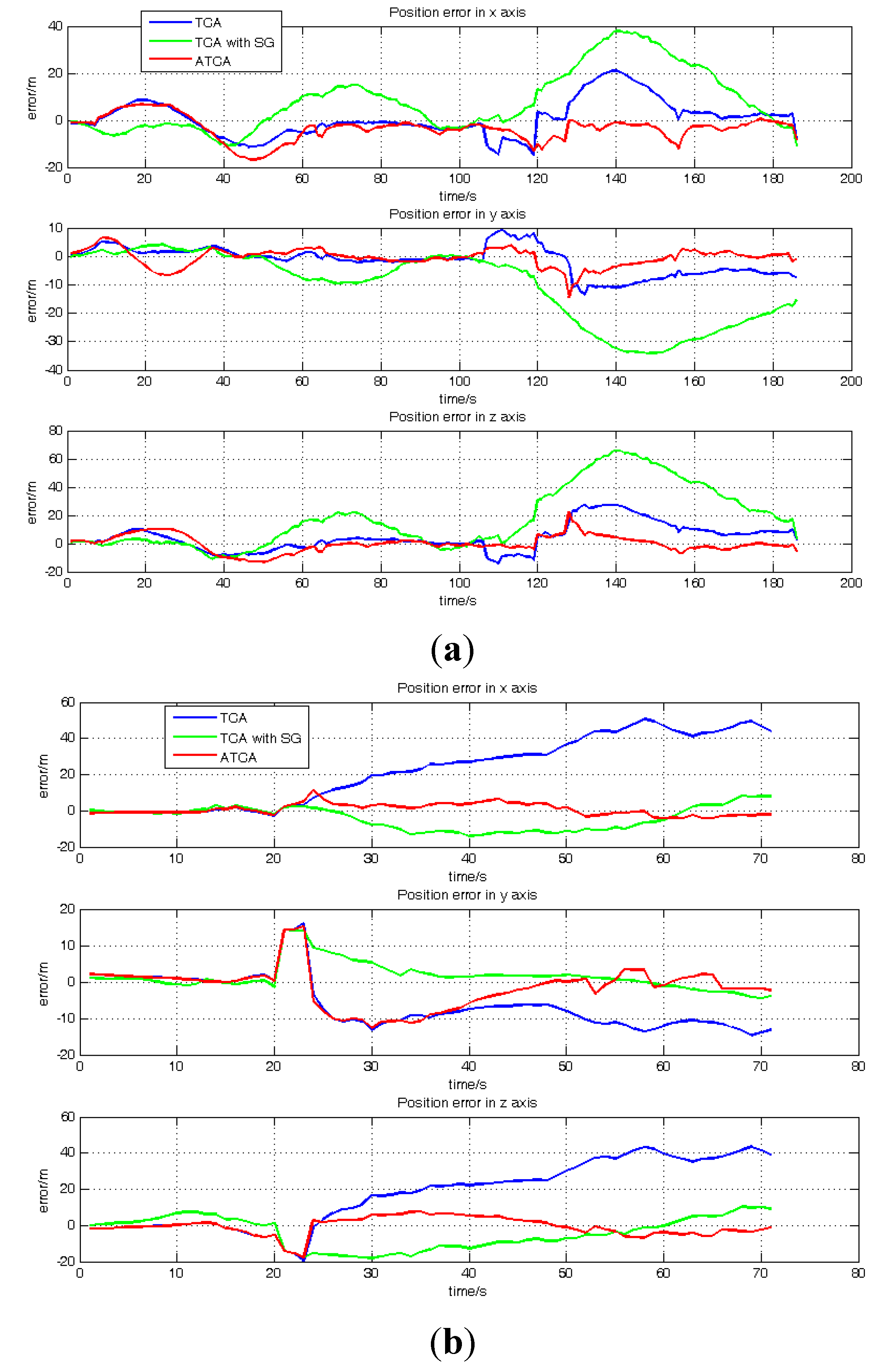
Figure 10a,b shows the position error results of TCA, TCA with SG and ATCA during the periods of 189–233 s and 531–700 s.
Table 3 shows the RMS of position error in these two periods. Because the satellite visible number is less than four in these two periods, the GNSS receiver has no output, and the performance of the standard TC is much worse than the other three methods. Hence, for a better comparison and presentation in the figure, only the position results of TCA, TCA with SG and ATCA are shown in the figures, but the standard TC position error result is listed in
Table 3.
Figure 10.
Position error comparisons: (a) position errors of TCA, TCA with SG and ATCA in the ECEF (Earth-Centered, Earth-Fixed) frame during the periods of 188 s and 233 s; (b) position errors of TCA, TCA with SG and ATCA in the ECEF frame during the periods of 531 s and 700 s.
Figure 10.
Position error comparisons: (a) position errors of TCA, TCA with SG and ATCA in the ECEF (Earth-Centered, Earth-Fixed) frame during the periods of 188 s and 233 s; (b) position errors of TCA, TCA with SG and ATCA in the ECEF frame during the periods of 531 s and 700 s.
Table 3.
RMS position error results.
Table 3.
RMS position error results.
| | The Period of 189–233 s | The Period of 531–700 s |
|---|
| X (m) | Y (m) | Z (m) | X (m) | Y (m) | Z (m) |
|---|
| Standard TC | 350.6096 | 707.5608 | 198.8642 | 1163.5 | 367.2 | 342.6 |
| TCA | 93.3646 | 77.1261 | 12.6208 | 37.7900 | 28.5764 | 16.7951 |
| TCA with SG | 11.5668 | 15.5311 | 6.4813 | 15.2633 | 14.6680 | 17.4740 |
| ATCA | 13.0553 | 14.0751 | 6.0460 | 12.0622 | 12.1148 | 12.9468 |
Figure 11a and b shows the position result of the GNSS receiver, standard TC, TCA, TCA with SG, ATCA during the periods of 50–187 s and 673–698 s. They are presented in the blue line, black line, pink line, green line and red line.
Table 4 lists the RMS of the position error in these two periods. The visible satellite number during the two periods is always more than four, and the GNSS receiver works normally in the two periods.
Based on the position performance comparisons of several selected periods and the overall results, we can conclude that the proposed ATCA method has the least error and is capable of providing the best navigation solutions in the simulation experiment.
Figure 11.
Position error comparisons: (a) position errors of GNSS receiver, standard TC, TCA, TCA with SG and ATCA in the ECEF frame during the periods of 50 s and 187 s; (b) position errors of the GNSS receiver, standard TC, TCA and ATCA in the ECEF frame during the periods of 673 s and 698 s.
Figure 11.
Position error comparisons: (a) position errors of GNSS receiver, standard TC, TCA, TCA with SG and ATCA in the ECEF frame during the periods of 50 s and 187 s; (b) position errors of the GNSS receiver, standard TC, TCA and ATCA in the ECEF frame during the periods of 673 s and 698 s.
Table 4.
RMS position errors.
Table 4.
RMS position errors.
| | The Period of 50–187 s | The Period of 673–698 s |
|---|
| X (m) | Y (m) | Z (m) | X (m) | Y (m) | Z (m) |
|---|
| GNSS | 8.0610 | 11.2364 | 7.0904 | 38.1481 | 67.8798 | 104.6477 |
| Standard TC | 7.6642 | 9.8481 | 6.3391 | 34.9907 | 47.0839 | 99.4847 |
| TCA | 5.9293 | 10.1106 | 6.1428 | 26.5837 | 10.8538 | 31.2858 |
| TCA with SG | 4.1211 | 8.9007 | 5.4018 | 15.4418 | 26.3500 | 38.1509 |
| ATCA | 3.1442 | 8.0449 | 5.7103 | 8.7274 | 17.6114 | 22.9864 |
7.3. Practical Experiment
In the practical experiment, post-mission processing using the real-time algorithms is used to assess the integration system performance. Though the algorithm was demonstrated in post-processing mode, no special pre-processing of the data was required. A series of tests were conducted to verify the performance of the approach proposed in this paper.
The initial values and the parameter configuration of the filters for the compared methods are listed as follows:
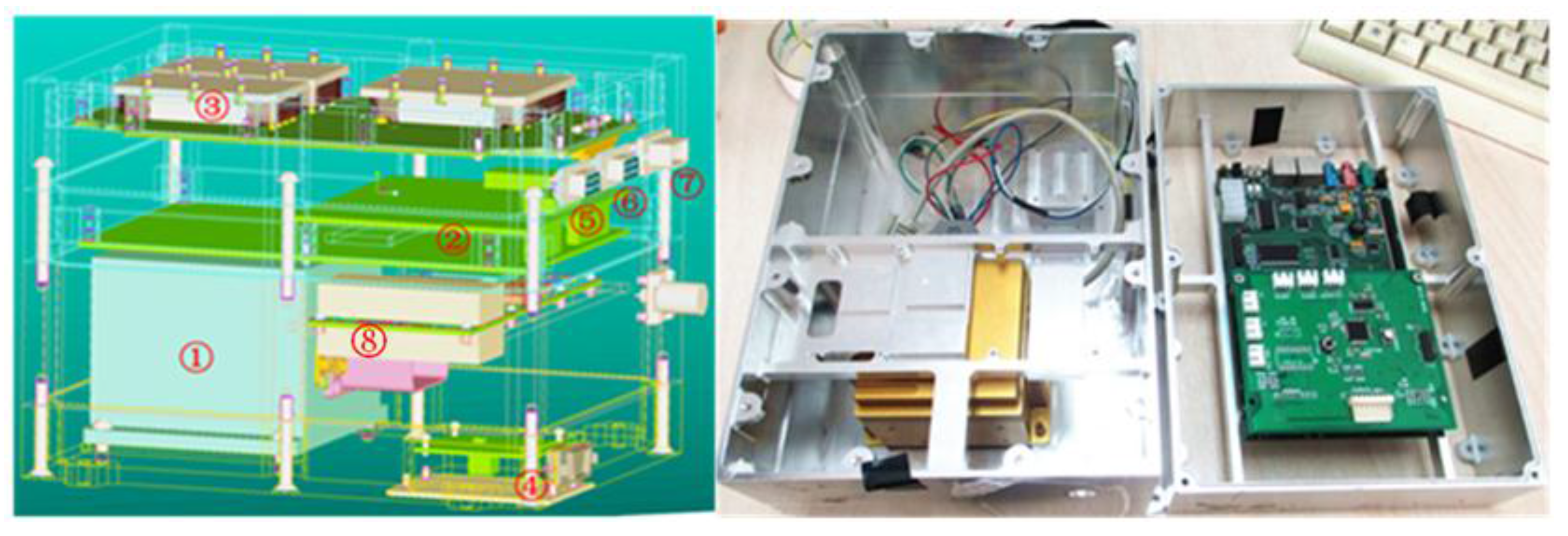
The field test was performed in Beijing, China, and the driving route is around the Beijing National Stadium. The IMU, GNSS receiver and the auxiliary measurement equipment are mounted in the vehicle. The inertial data are collected by the Crossbow (Milpitas, CA, USA) MEMS IMU 440, and the barometer MS5083 and magnetometer TCM5 are used as the auxiliary sensors to measure the height and magnetic heading.
The whole test lasted about half an hour, and the data were collected for verification. Both “simulated” outages and “real” partial outages existed in the processed data. The simulated outage means that if the satellite visible number is more than two or three in this period, this is treated as two or three satellites being tracked, and randomly, two or three satellites’ information is used for the calculation. In this field test, both the 345–530-s and 1450–1500-s periods are simulated as the two visible satellites situation, and the 1130–1300-s period is simulated as the three visible satellites situation. The satellite visible number during the process is shown in
Figure 12.
Figure 12.
Satellite visible number in the practical experiment.
Figure 12.
Satellite visible number in the practical experiment.
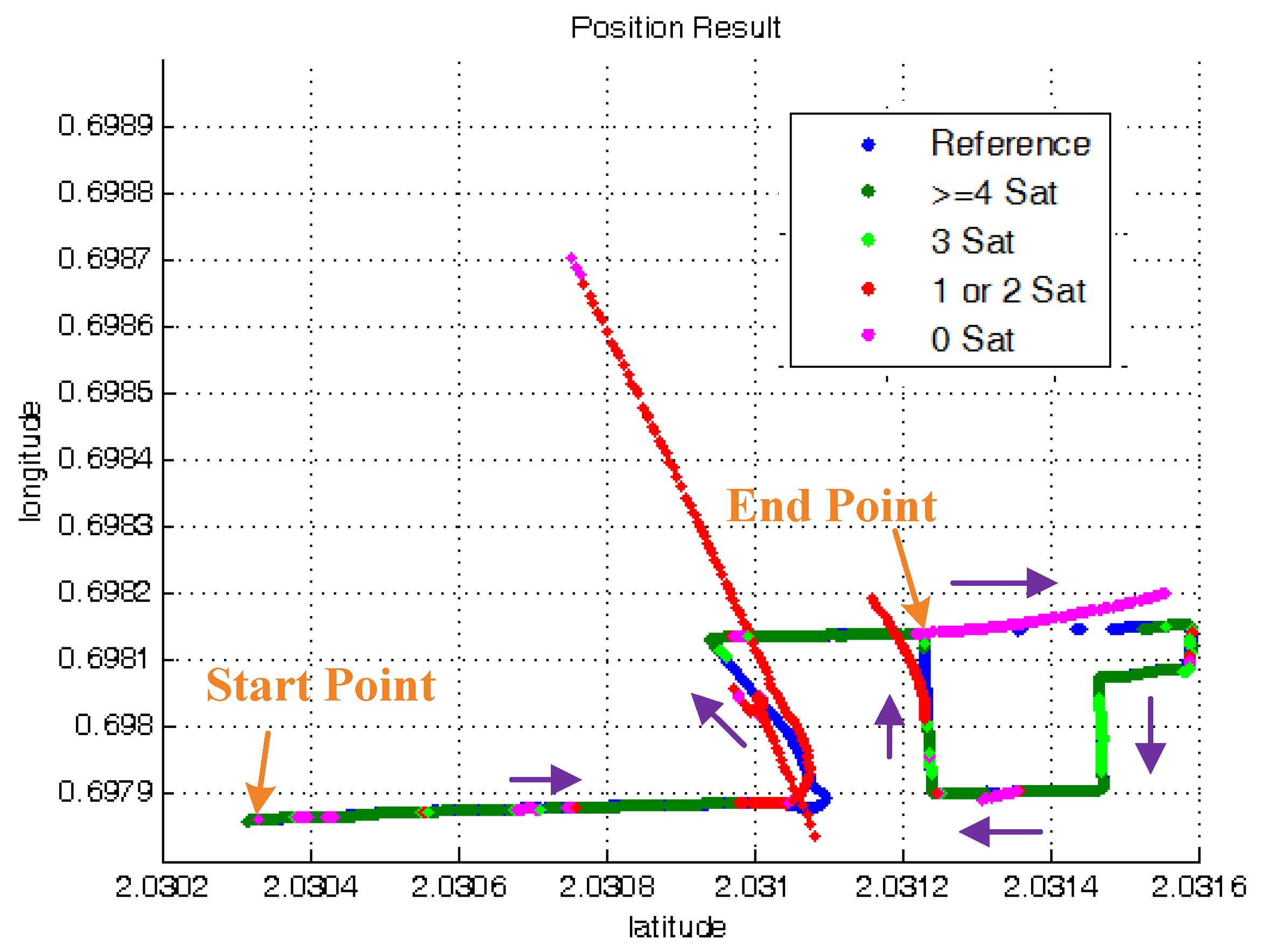
Figure 13 shows the position result of standard tight-coupled solution for the practical experiment. The blue points denote the reference trajectory. The dark green points denote the tightly-coupled solution with more than four satellites. The light green points denote the solution with three satellites. The red and pink points separately denote the position result with two satellites and less than two satellites. It can be seen in the figure that during the two visible satellites periods, the result of the standard tightly-coupled method drifts from the true trajectory greatly and has a large position error.
Figure 13.
Standard tightly-coupled position result.
Figure 13.
Standard tightly-coupled position result.
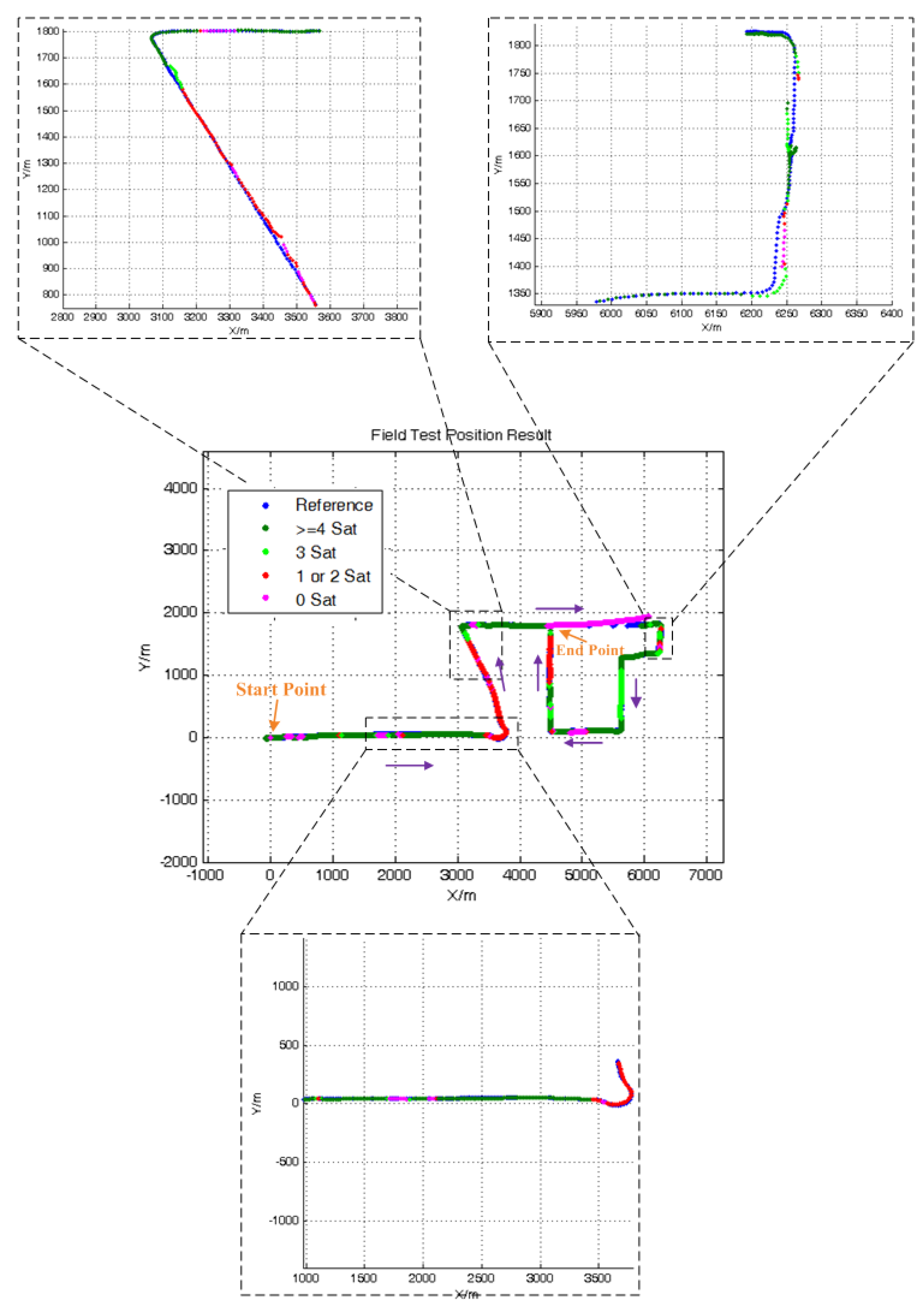
Figure 14 shows the whole trajectory result of ATCA and some zoomed details. The result obviously shows that the proposed method is also capable of solving the navigation problem in a GNSS signal-challenged environment in practice and is much better than the standard TC.
The TCA and TCA with SG are also implemented for evaluation and comparison. The differences between TCA, TCA with SG and ATCA are hard to identify, so the TCA result is not shown in the figures. However, the RMS of the position error is listed in
Table 5 for comparison. Moreover, we also select two periods where only two satellites are visible to compare the solution.
Table 5 lists the RMS of the position error for the whole practical experiment, and it shows that the ATCA has the least position error.
Figure 15 shows the position errors of TCA, TCA with SG and ATCA in the two simulated two visible satellites periods, and
Table 6 lists the RMS of position errors. The practical results also show that the proposed ATCA has the best performance and can provide the best position solutions with less than four visible satellites.
After both the simulation experiment and practical land vehicle test, the navigation solution results of standard TC, TCA, TCA with SG and ATCA have been described in the figures and listed in the tables. The specific analyses of the four compared methods are illustrated in the following.
The standard TC obviously diverges and suffers from the largest position errors, which can be up to hundreds of meters; the reason for this is that the system becomes unobservable because of the lack of enough measurement for the position solution.
The TCA has a much better performance compared to the standard TC. The position errors of TCA become convergent and can be constrained to less than 100 m; this is because the external height and heading information improves the position constraints of the whole system, and the system becomes observable. However, in some periods, the position error will increase to 20–50 m and slightly decrease to a normal range, as shown in
Figure 10; this is because at several points, the system measurements (pseudo-range and pseudo-rate) suffer from a large measuring noise because of signal blockage; the filter still makes use of the constant measurement covariance model and leads to the error in the final solution.
Figure 14.
Position result of ATCA.
Figure 14.
Position result of ATCA.
Table 5.
RMS of the position error in the ECEF frame of the whole experiment.
Table 5.
RMS of the position error in the ECEF frame of the whole experiment.
| | Error X (m) | Error Y (m) | Error Z (m) |
|---|
| Standard TC | 355.8420 | 276.7677 | 483.7556 |
| TCA | 8.4694 | 4.0710 | 8.1874 |
| TCA with SG | 6.4785 | 3.8244 | 8.8093 |
| ATCA | 3.4617 | 3.6882 | 4.3391 |
Table 6.
RMS position error in the two periods.
Table 6.
RMS position error in the two periods.
| | The Period of 345–530 s | The Period of 1450–1500 s |
|---|
| X (m) | Y (m) | Z (m) | X (m) | Y (m) | Z (m) |
|---|
| Standard TC | 794.757 | 628.0711 | 1076.4786 | 126.3409 | 39.7067 | 109.4160 |
| TCA | 7.7362 | 4.85646 | 9.48123 | 18.6519 | 6.94387 | 17.7130 |
| TCA with SG | 13.1257 | 12.4301 | 21.6142 | 6.4785 | 3.8244 | 8.8093 |
| ATCA | 5.1612 | 3.14215 | 5.86392 | 3.17873 | 5.62555 | 5.11066 |
Figure 15.
Position error comparisons: (a) position errors of TCA, TCA with SG and ATCA in the ECEF frame during the periods of 345 s and 530 s; (b) position errors of TCA, TCA with SG and ATCA in the ECEF frame during the periods of 1450 s and 1500 s.
Figure 15.
Position error comparisons: (a) position errors of TCA, TCA with SG and ATCA in the ECEF frame during the periods of 345 s and 530 s; (b) position errors of TCA, TCA with SG and ATCA in the ECEF frame during the periods of 1450 s and 1500 s.
The TCA with SG involves the SG method in TCA and employs the innovation sequence to adaptively estimate and tune the measurement noise covariance
R online. With this strategy, the measurement quality can be evaluated, and the noise covariance is adjusted based on the actual situation instead of employing a constant value. The results listed in the
Table 2,
Table 3 and
Table 5 have demonstrated that the TCA with SG successfully avoid the position error appeared in TCA, which is caused by the signal blockage. As illustrated in
Figure 11b and
Figure 15a, in some periods, the TCA with SG performs worse than TCA and suffers from a larger position error, the reason for this is that the system state vector
X is not well estimated, and it affects the estimation of covariance noise
R in these two durations. However, though the TCA with SG cannot perform well all of the time and have larger position error in some periods, this method still owns an overall better performance than TCA.
The ATCA has the best performance of all. This proposed method is able to effectively make use of external measurement height and heading together and add them in the measurement mode to increase the system observability. On the other side, it introduces the redundant measurement noise estimation method to adaptively tune the R online to avoid the negative effect of GNSS measurement noise. Compared to TCA with SG, which also owns the adaptively tuning strategy to estimate the measurement noise, the novel proposed redundant measurement noise estimation method used in ATCA, which utilizes the second order difference sequence to estimate the noise variance, totally relies on the measurement system itself to acquire the noise information without coupling the system state error. However, the Sage-Husa method is based on the innovation sequence, and the database for noise estimation is the difference of measurement Z and system prediction X−, which means that the estimation error of X will be involved in the noise estimation to affect the filter. Hence, the ATCA performs better, has less position errors than TCA with SG and has the best solution result of all of the compared methods.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}