1. Introduction
The self-organizing nature of micro sensors in Wireless Sensor Networks (WSNs) and their ability to operate without support of predetermined infrastructure makes them effective for data gathering in a variety of areas, even in harsh environments. Energy consumption however remains one of the main design challenges in WSNs, due to the limited energy resource that is supplied by the batteries in the sensor node. It is usually unfeasible to recharge or replace the batteries once the sensor nodes have been deployed due to inaccessible terrains and enormous deployment scale [
1]. A thoughtful design of WSNs is required to provide significant benefit to network lifetime by being energy efficient. Research has shown that the sensor node utility that drains the most energy is the radio module during communication mode [
2]. The causes of energy waste in the radio module of the sensor node have been identified mainly as idle listening, collisions, overhead and overhearing.
MAC protocols are employed to arbitrate access to the shared medium to avoid different causes of energy waste, and at the same time to efficiently share the medium resources among multiple sensor nodes [
3]. Energy efficient MAC protocols control the duty cycle of the sensor nodes, based on the availability of traffic, minimizing idle listening leading to reduced energy waste [
1,
4]. MAC protocols use efficient schedulers to adapt to different traffic patterns of the network. Most schedulers are based on the sensor node traffic without considering the energy remaining in the nodes. The use of the remaining energy of sensor nodes in determining sensor nodes’ schedule is important in improving the network energy performance. The large scale deployment of sensor nodes also contributes to the high communication packets overhead in WSNs, as all nodes report their sensed data to the base station, which results in a lot of energy waste. To alleviate this problem, clustering has been widely adopted in the design of WSNs [
5]. Clustering reduces the number of transmissions to the base station as the CH is responsible for the communication of each cluster. Clustering is known for its scalability as it provides load balancing and efficient resource utilization by grouping the nodes within a geographical neighborhood into a cluster.
WSNs utilize the wireless channel for their communication, and therefore are prone to fading due to the unreliable nature of the wireless channel. This leads to packet errors, which requires packet retransmission, resulting in energy waste. Currently researchers employ cooperative diversity to mitigate the effects of fading in WSNs, by using relay nodes to cooperate in the communication [
6]. The enhanced reliability through the use of cooperating terminals reduces the need for retransmission which effectively leads to energy conservation. Cooperative diversity utilizes relay selection to choose the best relay nodes based on the channel quality of the relay link, and seldom based on the combination of distance and residual energy of the relay nodes which is also a vital instrument for the efficiency of WSNs.
The aim of this work is to design an energy efficient MAC protocol for cluster-based wireless sensor networks, based on distance, residual energy, and channel quality, to improve the energy and delay performance of WSNs. The remainder of this paper is organized as follows: related work is discussed in
Section 2, followed by the system model and detailed description of proposed MAC protocol in
Section 3.
Section 4 presents description of the analytical channel and energy model for proposed protocol. The simulation based performance and analytical performance evaluation is discussed in
Section 5, and lastly the conclusions are presented in
Section 6.
2. Related Work
LEACH [
2] and LMAC [
7] are built on the concept of TDMA and allocate single independent transmission slots to each sensor node in a cluster. The TDMA-based schedule provides collision free slot allocations to sensor nodes, leading to reduced energy waste; however it is faced with a challenge of idle listening on nodes that do not have data to send during their allocated slots. ETDMA [
8] extends the operation of TDMA to further reduce energy consumption due to idle listening, by turning off the radio modules of the sensor nodes that have no data to send during their assigned slots. Though energy is conserved by avoiding idle listening, the protocol incurs a lot of delay due to the allocated unutilized slots. BMA [
9] is an intra-cluster communication protocol for large-scale cluster-based WSNs intended for event-driven applications. It reduces energy waste by avoiding idle listening by scheduling only nodes that have data to transmit. The protocol allocates a single transmission slot to each node that has data to transmit. The enhancement of the protocol, BMA-RR [
10] provides variable data slots to sensor depending on their load. The scheduler is based only on the available packets on the sensor node, without considering the remnant energy of the sensor nodes, which could enhance the schedule performance. The data transmission of this protocol also does not feature cooperative transmission to address wireless channel reliability issues in WSNs.
The cooperative communication research presented in [
11] introduces both proactive and reactive protocols of cooperative communication; the protocols are both efficient, but due to the vast deployment of sensor nodes, there is high possibility of overhead incurred by the system due to the receipt of control signals from individual nodes by neighbors. Work done in [
12] presents a threshold-based adaptive relay selection scheme, which uses a threshold to select the relays for cooperation. The drawback of this model is its use of multiple relays while sometimes only one relay might have enough channel gain to make a successful transmission, leading to unnecessary energy consumption due to transmission of multiple relay terminals. CPS-MAC [
13] selects the relay nodes based on the buffer state and the channel state information (CSI) obtained through the exchange of control messages. The protocol however does not consider the remaining energy of the relay nodes, which can cause early network partitioning if relay nodes run out of energy. A close relation to our cooperative model is WcoopMAC [
14], a cooperative MAC protocol adopting decode and forward technique for relaying of data to improve the energy performance of WSNs. The protocol selects the relay nodes based on the residual energy information and CSI, however it does not consider the relay node distance. The protocol is reactive, making an inefficient use of the channel as the direct link is always used regardless of the channel conditions, which leads excessive energy waste due to retransmissions.
Although the effects of the techniques mentioned in this work and applied to the communication protocols have been independently investigated, not many protocols have applied cooperative diversity in clustered WSNs. This work makes the following contributions: first a cooperative MAC protocol featuring CQI, energy and distance for relay selection combined with cross-layer based scheduling is presented. Secondly, an analytical model for the energy consumption and delay for the proposed protocol is developed. This work differs from other works as it incorporates the effects of clustering and cooperative diversity in a scheduled MAC for WSNs, and does not examine the two techniques independently. This work also proposes a new scheduling algorithm at cluster level with the aim to improve energy performance among nodes with varying loads within the cluster such that all nodes are given a fair chance of transmission.
3. System Model
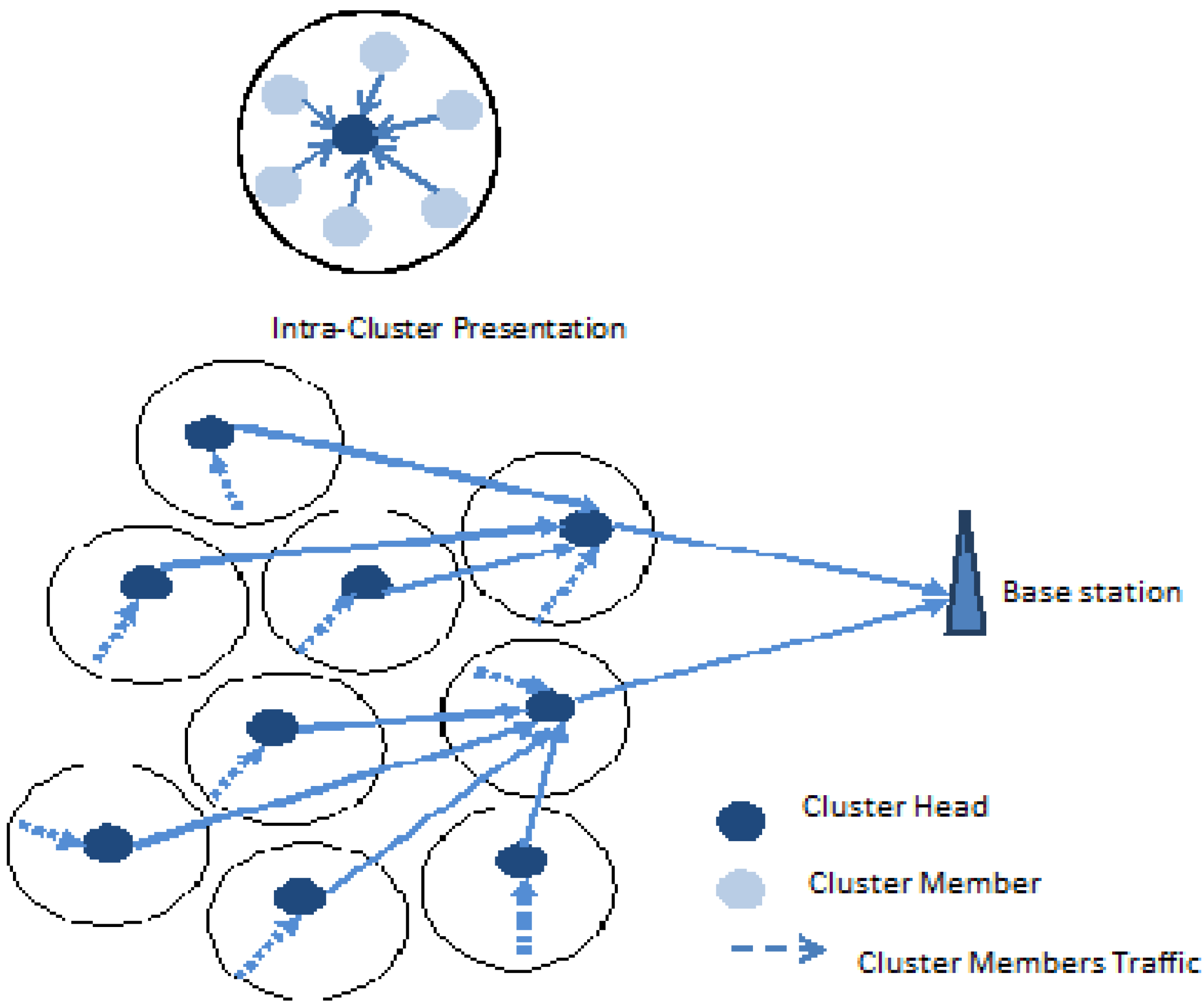
The system architecture used in this work is adopted from LEACH [
2], that has the basic system model for a cluster-based WSNs scenario. It has proved to have energy savings above a factor of 7 compared to flat architecture. The network is composed of sensor nodes randomly distributed in a geographical area, and grouped into clusters. There are Normal Sensor Nodes (SN) and Cluster Heads (CH). Each SN in every cluster communicates directly with the CH and every communication within the cluster is handled by the CH. A Base Station (BS) with unlimited energy is located far away from the sensor network as illustrated in
Figure 1.
Figure 1.
Selection Relaying Cooperative WSN.
Figure 1.
Selection Relaying Cooperative WSN.
A CH in each cluster is responsible for communicating the aggregated data of the cluster to the BS. The model is further enhanced to meet our communication scenario, communication between the CH and BS can either be direct or cooperative. Direct communication is used when the channel condition is good. If the channel conditions are fair, communication can be either direct or cooperative, based on the CQI and distance ratio between the CH and BS. If the channel is bad, cooperative communication is considered. For cooperative communication, a relay cluster head (RCH) is selected to aid the CH communication to BS. RCH selection is based on its distance away from the BS, its remaining energy level and the CQI along its link. The CH communicates with RCH, which then relays the information to the BS.
3.1. The Proposed MAC Protocol
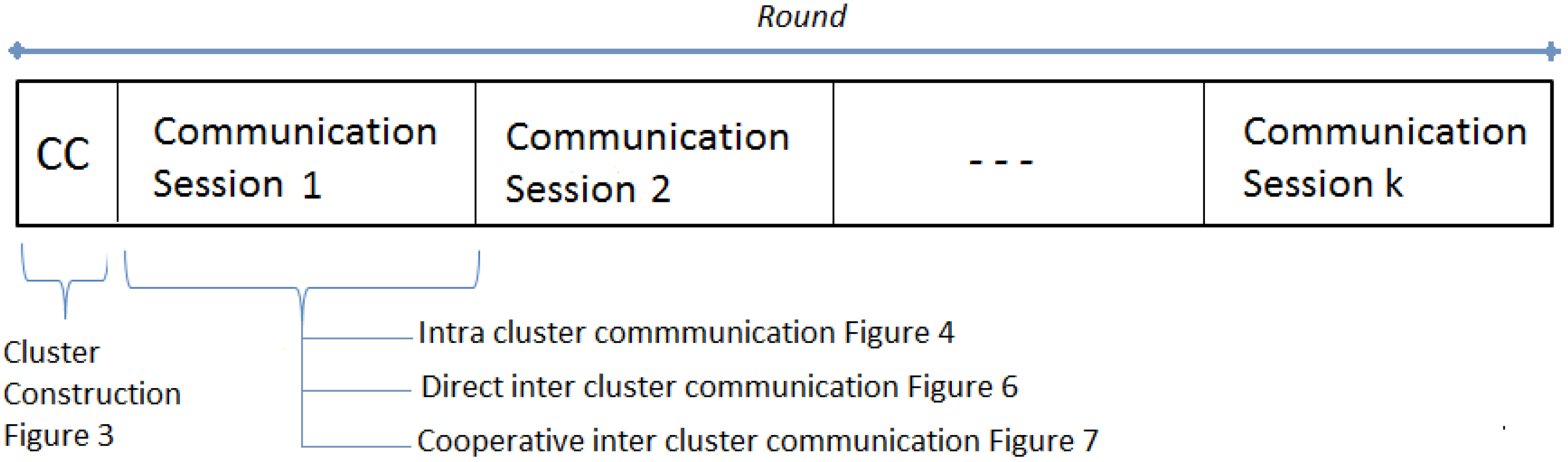
The proposed MAC protocol is time slotted and its operation is separated into intra-cluster communication and inter-cluster communication. The inter-cluster communication is further divided into communication rounds as illustrated by a complete inter-cluster communication frame in
Figure 2. Each round is formed by Cluster Construction (CC) and a number of sessions. The duration of a communication round is fixed and number of sessions is decided on implementation depending on data traffic of the application.
Figure 2.
MAC Communication Round.
Figure 2.
MAC Communication Round.
A communication session consists of contention (Cont.) period, a schedule (Sch.) slot, data communication (Dt.) slots and variable sleep slot period. The sleep period varies depending on the traffic available during each session. Each cluster follows its independent intra-cluster communication frame.
3.2. Cluster Construction
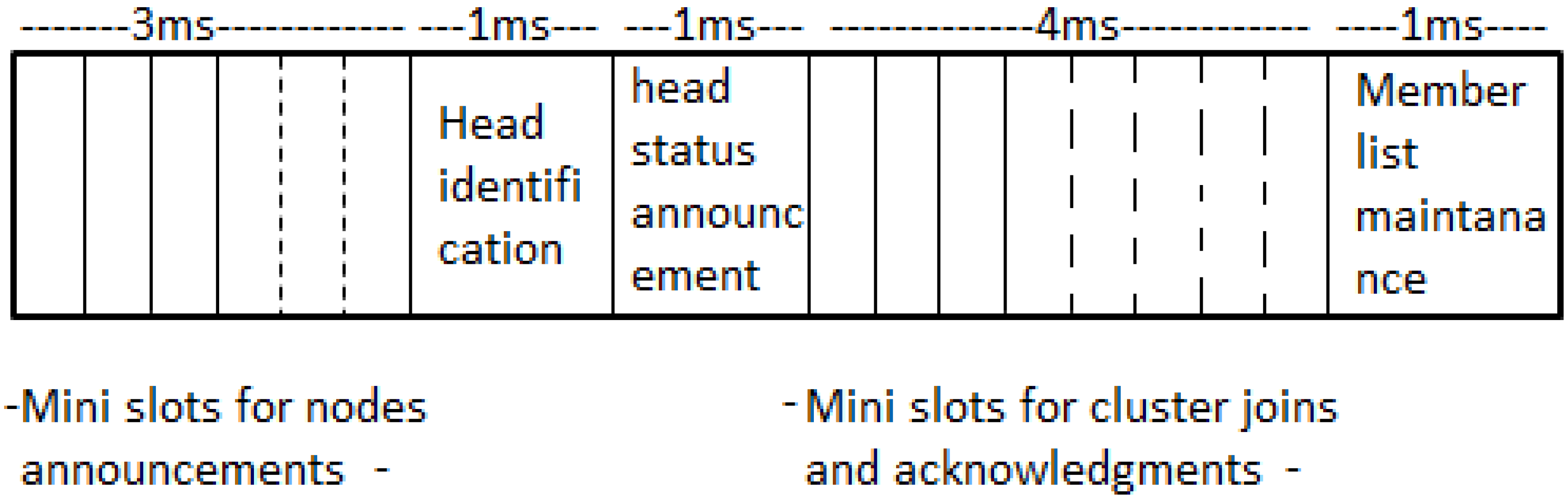
The clusters are formed and renewed during the cluster construction period which occurs at the start of a communication round. During this period, SNs determine their energy with respect to others within its vicinity. The contention time is divided into mini-slots, within which each node announces their energy level and coordinates. Each mini slot is built of a short inter-frame space (SIFS) and a communication slot. A node waits a SIFS time before it transmits to avoid collisions. When all the nodes have sent their announcements, a cluster head is identified based on the remaining energy and the SN with higher energy level elects itself as a CH; then it announces its head status to other SNs in the next slot. The SNs close to the CH decide to join its cluster, using CSMA/CA contention on the allocated mini-slots. CH then forms and maintains a member list table as indicated by cluster formation frame in
Figure 3. The cluster construction process is further illustrated by Algorithm 1.
Figure 3.
Cluster Construction.
Figure 3.
Cluster Construction.
| Algorithm 1 Cluster Construction |
| SN announces its energy level and coordinates within its neighborhood, |
| SNs determine their energy level with respect to other nodes within same region, |
| If SN’s energy is highest then |
| SN elects self as CH, |
| CH announces head status, |
| CH waits for join request, |
| Else |
| SN waits for CH announcements, |
| Determine CH with shortest communication distance, |
| If CH’s distance shortest then |
| SN sends cluster join request to CH, |
| End if |
| End if CH forms members list table, |
| CH announces the cluster members list |
3.3. Intra-Cluster Communication Session
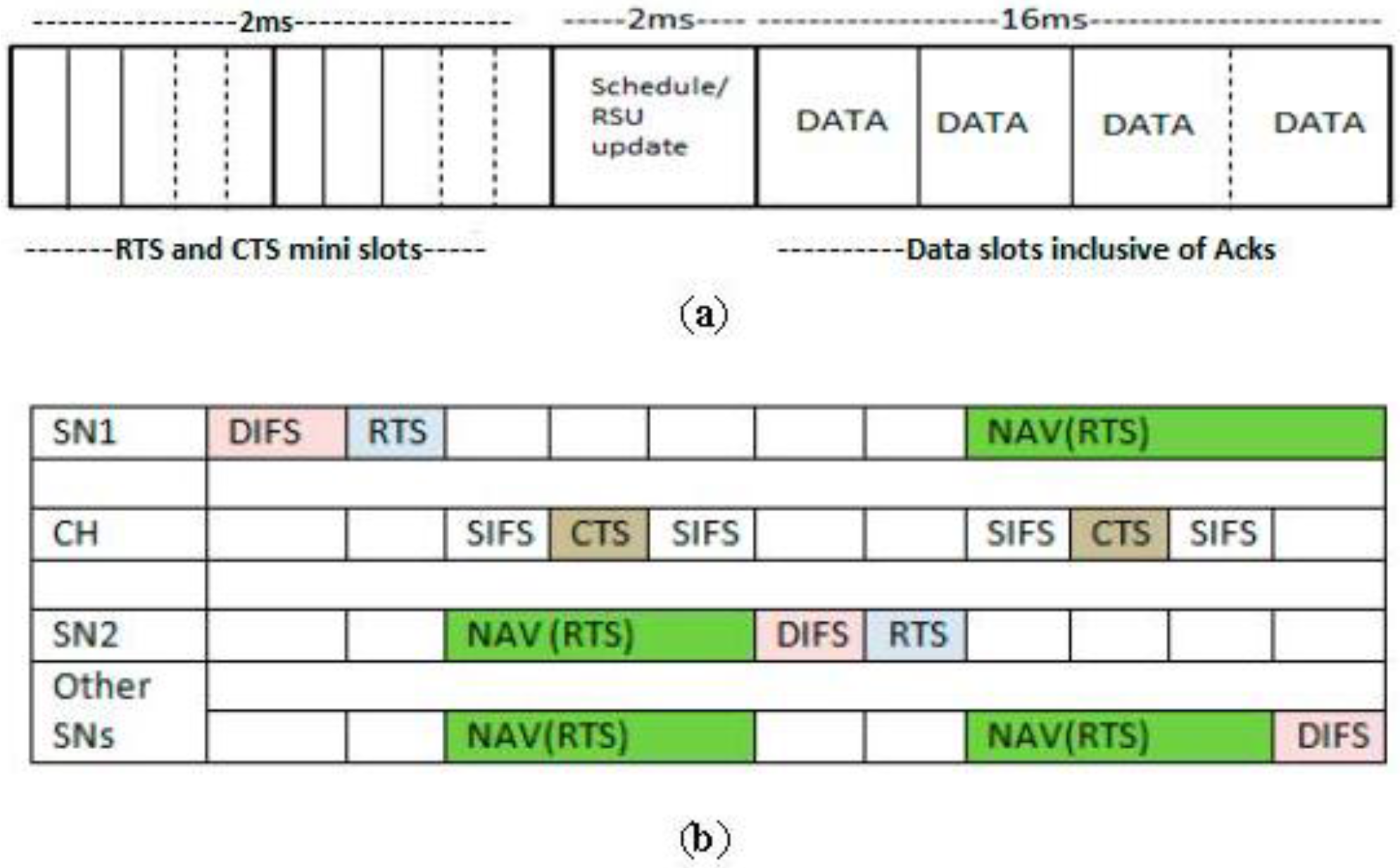
After the clusters are formed, communication takes place within each cluster during communication sessions. In each session, the contention time for the handshake mechanism is divided into mini slots within which the nodes indicate their intention to transmit data. The nodes contend for the medium using CSMA/CA employed by IEEE 802.11 MAC protocol, through RTS packet transmission to the CH. During the Schedule period the CH uses the source nodes’ information on the received RTS packets from the SNs, and prepares slot reservations based on an adaptive cross-layer schedule. The cross-layer schedule uses the remaining energy and the amount of data traffic on each SN to decide which nodes should be scheduled first. The nodes with the least energy to packets ratio, calculated from the RTS packet information, are scheduled earliest. If the destination intended for the source packets is not available or dead, the node will not be scheduled but will drop such packets. Once the schedule is done, the CH broadcasts the schedule to all nodes within the cluster. After the schedule announcement, data communication takes place, according to the schedule. Scheduled nodes transmit at their scheduled time, and when a node completes transmission, it goes to sleep until next session. The nodes that are not scheduled sleep until the next session begins. Every node follows a transmission frame, subdivided into time slots as shown in
Figure 4a. The time slots are decided based on the amount of communication required for each packet and the bandwidth utilization depending on whether a message is a unicast or a broadcast message. The session communication is outlined in Algorithm 2.
The frame indicates the communication activities of a node from one communication frame to the next. The node sends a packet in one frame and receives in the next frame.
Figure 4b illustrates the detailed cluster notes communication during the contention window as indicated by the RTS and CTS slots the in
Figure 4a.
Figure 4.
(a) Nodes’ Communication Session; (b) Nodes’ Contention Window.
Figure 4.
(a) Nodes’ Communication Session; (b) Nodes’ Contention Window.
| Algorithm 2 Intra-cluster Data Communication Session |
| Communication session begins, |
| Nodes check their buffers for packets, |
| If packets available and node is SN then |
| Contend using CSMA/CA for medium and send RTS, |
| Elseif node is CH then |
| Receive RTSs, |
| Send CTSs, |
| End if |
| If medium idle for SIFS +DIFS then |
| CH prepares nodes’ schedule according to Algorithm 3, |
| End if |
| CH Broadcast schedule to all members, |
| SNs identify their transmission slots from the received schedule, |
| Nodes Tx and Rx data in allocated slots, |
| CH receives data from the SNs in allocated slots, |
| CH aggregates data to send to BS. |
Cross-Layer Scheduling
In WSNs the data traffic load varies on individual nodes, as well as the energy level from one sensor node to another. A node may have lots of data traffic to transmit, and may be prioritized over other nodes. This can present fairness issues for other nodes which still need to transmit their data, and some of which may have insufficient resources. We present a cross-layer scheduling algorithm adaptive to the data traffic and available energy resources of the sensor node. The schedule stores the data requests of sensor nodes in a job array, and the energy levels of all source nodes in the corresponding fields of the resources array.
The schedule defines a medium access decision parameter for each of the nodes, which is the ratio of the number of packets available to the remaining energy level of a node. The schedule checks the slot schedule array to find if there are available slots, if there are still available slots the schedule checks the values of each node and priority of access is granted to a node that has the highest value. The node is then allocated the particular slot. The schedule then reduces the job array for the node by 1 and updates the energy level. If the packet to energy ratio is same for some nodes, the schedule will prioritize the node that was scheduled in previous slot. The process is repeated while there are still available slots to schedule and there are jobs in the job array as illustrated by Algorithm 3.
| Algorithm 3 Scheduling Algorithm |
| CH checks available slots, |
| While available_slots > 0 do |
| Store the transmission request in job array, |
| Store the energy level in resources array, |
| CH calculates for SNs based on packets and energy level, |
| Determine SNs with maximum , |
| If SN’s = maximum then |
| Schedule SN for next available slots for its data transmission, |
| Else if SNs have same value of then |
| Check SN scheduled in the previous slot and schedule it for the next available slot, |
| End if |
| update SN energy level, |
| update SN packets, |
| update available slots, |
| End while |
3.4. Cooperative Inter-Cluster Communication
The inter-cluster communication adopts the basic model for cooperative communication implemented in [
15], with an extension of using more than one relay node in this work. The communication involves proactive cooperative communication between cluster heads (CH), the base station (BS) and possible relay cluster heads (RCH) and is illustrated by
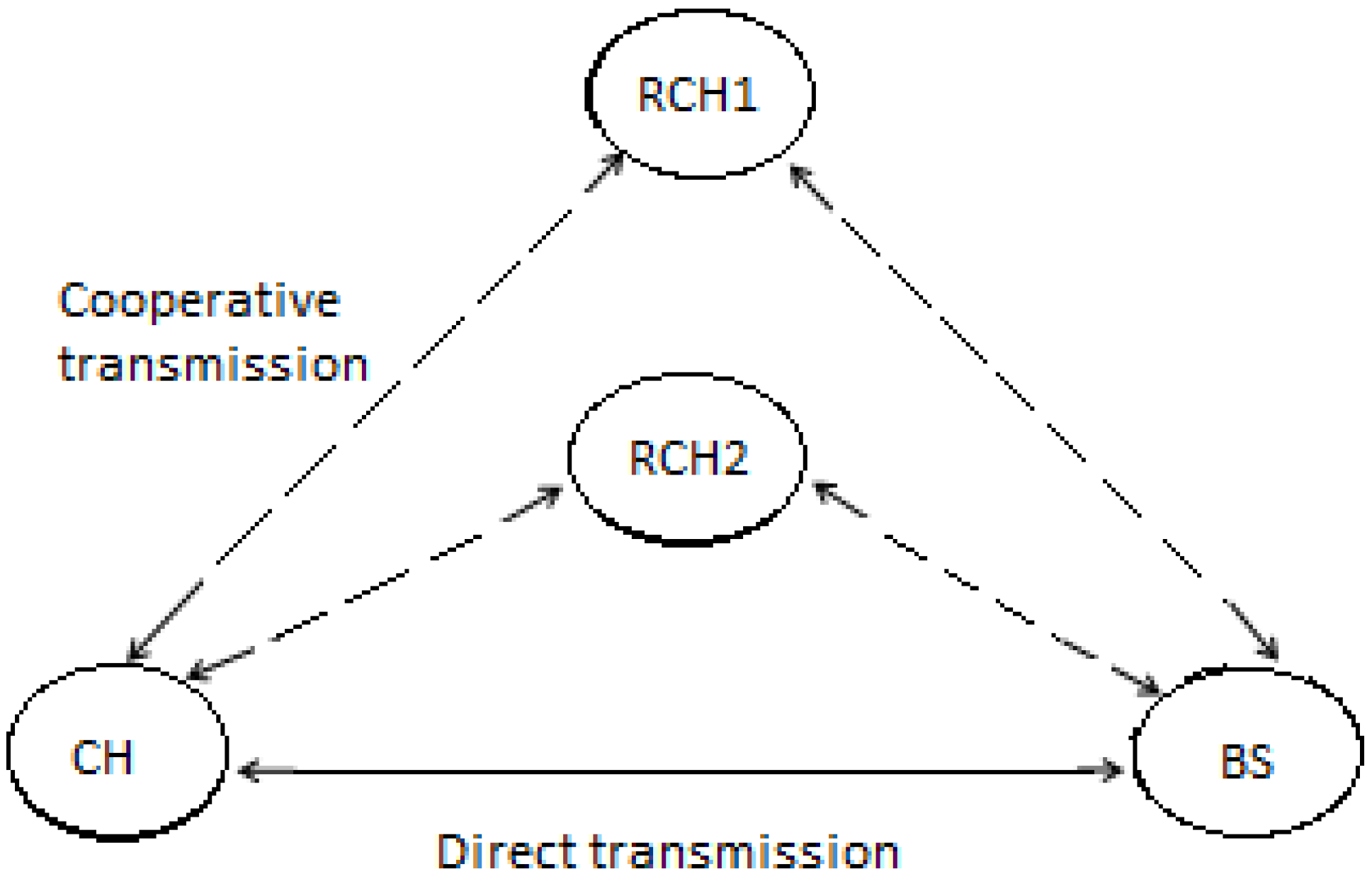
Figure 5. The relay selection cost is the function of CQI, remaining energy level and the distance away from the BS. The communication is in two phases, direct and cooperative transmission phase.
Figure 5.
Cooperative Communication.
Figure 5.
Cooperative Communication.
3.4.1. Direct Transmission
A CH that has data to send to the BS indicates its request for transmission by sending an RTS packet to the BS. The BS calculates the CQI and attaches its value on the CTS packet to the CH. CH uses CQI and distance to decide the transmission phase. If CQI indicates that the channel is good direct transmission takes place, if the channel is fair and the communication distance is below the separation distance threshold also direct transmission is implemented. A CH then transmits its data packets to the BS. The base station responds with an ACK packet if all data packets are received correctly as illustrated by direct transmission frame in
Figure 6, else a NACK is sent, and the CH retransmits the incorrectly received packet to the BS. The direct transmission process is outlined in Algorithm 4.
Figure 6.
Cluster head direct transmission session.
Figure 6.
Cluster head direct transmission session.
| Algorithm 4 Direct Transmission |
| CHs check buffers for packets |
| If packets available then |
| Send RTS to BS |
| BS calculates CQI from CH, |
| BS sends CTS to CH |
| CH determines channel conditions based on CQIs, |
| If (CH to BS channel condition is good) or (fair and distance is less than threshold) then |
| CH selects CH to BS channel for transmission, |
| CH transmit data to BS, |
| BS sends an ACK to the CH and communication ends, |
| Else |
| Execute Algorithm 5 |
| End if |
| Else |
| Continue with intra-cluster communication |
| End if |
3.4.2. Cooperative Transmission
When CH sends RTS to the BS to show their request to send data, the RCHs hear the RTS packet; they calculate CQI for the link between relays and CH. Also, when the BS sends the CTS to CH, the RCHs hear the CTS, they calculate the RCH-BS link CQI which they send to the CH through a RCTS. The CH uses this CTS and RCTS information and distances to decide which transmission phase to follow. If the channel condition is bad between CH and BS or if channel is fair but the distance between CH and BS is huge, an RCH is selected to relay the data. The transmission distance has an effect on the energy consumption by first order radio model [
2]. The CH then transmits a relay selection update (RSU) packet to indicate the relay node selected, the other RCH then ignores data transmission from the CH. The CH then sends data to the selected RCH; the RCH then relays the data using facilitation technique to the BS. The RCH then keeps the data until an ACK is received from the BS as illustrated in
Figure 7 and outlined in Algorithm 5. If a NACK is received, Selective Repeat Automatic Repeat Request error control [
16] is used to retransmit the packets.
| Algorithm 5 Cooperative Transmission |
| CHs calculate relay selection cost, |
| Determine CH with minimum cost, |
| If CH’s cost=minimum then |
| elect as RCH node, |
| Else |
| Remain as CH, |
| End if |
| CH check buffer for packets |
| If packets available then |
| Send RTS to BS and RCHs hear it, |
| BS calculates CQI from CH, |
| RCHs calculate CQI for CH to RCH link, |
| BS sends CTS to CH and broadcast it to RCHs, |
| RCHs calculate CQI for RCH to BS link, |
| RCHs send RCTS to CH, |
| CH determines channel conditions based on CQIs, |
| If (CH to BS channel condition is fair and distance is greater than threshold) or (CH to BS channel condition is bad) then |
| Select RCH with highest CQI, |
| CH sends a relay selection update to possible relays, |
| Non selected RCHs retire from communication, |
| CH transmits data to selected RCH, |
| RCH relays data to BS using facilitation technique, |
| BS sends ACK to CH and RCH hears it and communication ends, |
| End if |
| Else |
| Continue with intra-cluster communication |
| End if |
Figure 7.
Cluster head cooperative transmission session.
Figure 7.
Cluster head cooperative transmission session.
5. Performance Results
This section presents the simulation and analytical results for the proposed energy-efficient MAC protocol for cluster-based wireless sensor networks (EEMACCSN) MAC framework. The network is simulated for 100 immobile sensor nodes randomly distributed over a 2-dimensional geographical network area of 500 m × 500 m. Each node has two properties, namely their location coordinates and the energy level used to determine their cluster membership. The nodes with the highest energy level are determined and then clusters are formed using the Voronoi algorithm. The inter-arrival of packets on each node in the network is exponentially distributed, following a Poisson process and independent per sensor node. The simulation results are obtained from an event driven custom built Visual C++ simulator. The simulation parameters are shown in
Table 2 similar to the parameters used in [
10]. Some parameters are varied in the simulations to depict different scenarios as indicated on the results.
Table 2.
Simulation parameters.
Table 2.
Simulation parameters.
| Number of Nodes | 100 |
|---|
| Area | 500 m × 500 m |
| Packets arrival rate | Varied from 0.01 to 0.1 packets per second |
| Data Packet | 250 bytes |
| Length Packets (RTS,CTS,ACK) | 18 bytes |
| Length Packets (RSU,SCH) | 16 bytes |
| Initial Energy Eo | randomly distributed between (0–50) Joules |
| Pw_transmit | 462 mW |
| Pw_receive | 346 mW |
| Pw_idle | 310 mW |
| Pw_sleepSNR threshold at receiver | 100 μW9 dB |
The performance of the proposed EEMACCSN protocol is first compared to the BMA-RR [
10], a MAC protocol for cluster based sensor networks.
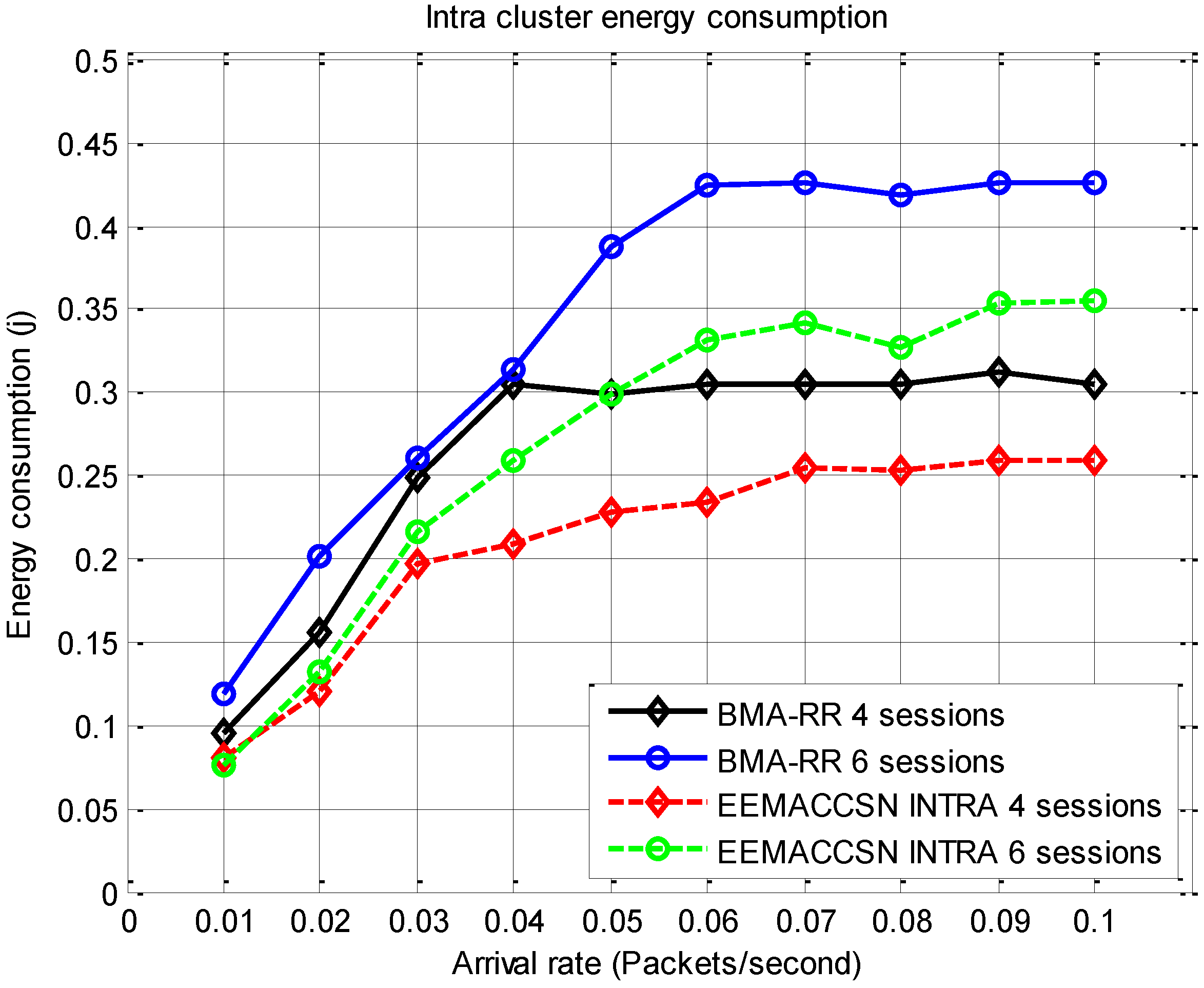
Figure 9 presents the results of energy consumption per node during intra-cluster communication round for variable arrival rates. The proposed MAC framework intra-cluster communication is compared with BMA-RR [
10] energy consumption. The intra-cluster communication involves the communication of the normal cluster member nodes with their cluster head node, within a cluster. The energy consumption in the network increases with the increase in the arrival rate, this is due to the fact that at high arrival rates the network spends most of its time in the transmitting the packets which contributes to the high energy consumption. It is also observed that the energy consumption is high when the number of sessions is increased as more communication slots are assigned to nodes in a round. The energy consumption at arrival rates
0.04 also reach a steady point due to the fact that the slots in each session are fixed, and only maximum available slots can be allocated just as in [
10]. From the results we can deduce that EEMACCSN protocol improves the network energy consumption. This is due to the following; firstly the adaptive energy efficient cross-layer schedule for the medium access utilized by EEMACCSN. Secondly idle time is reduced during the sensor nodes contention period as only nodes that have data contend in EEMACCSN, unlike BMA-RR where all nodes are active during the contention period. Lastly the clustering algorithm of EEMACCSN allows nodes to defer transmission of announcements if a message from a higher energy node is heard leading to energy saving on such nodes.
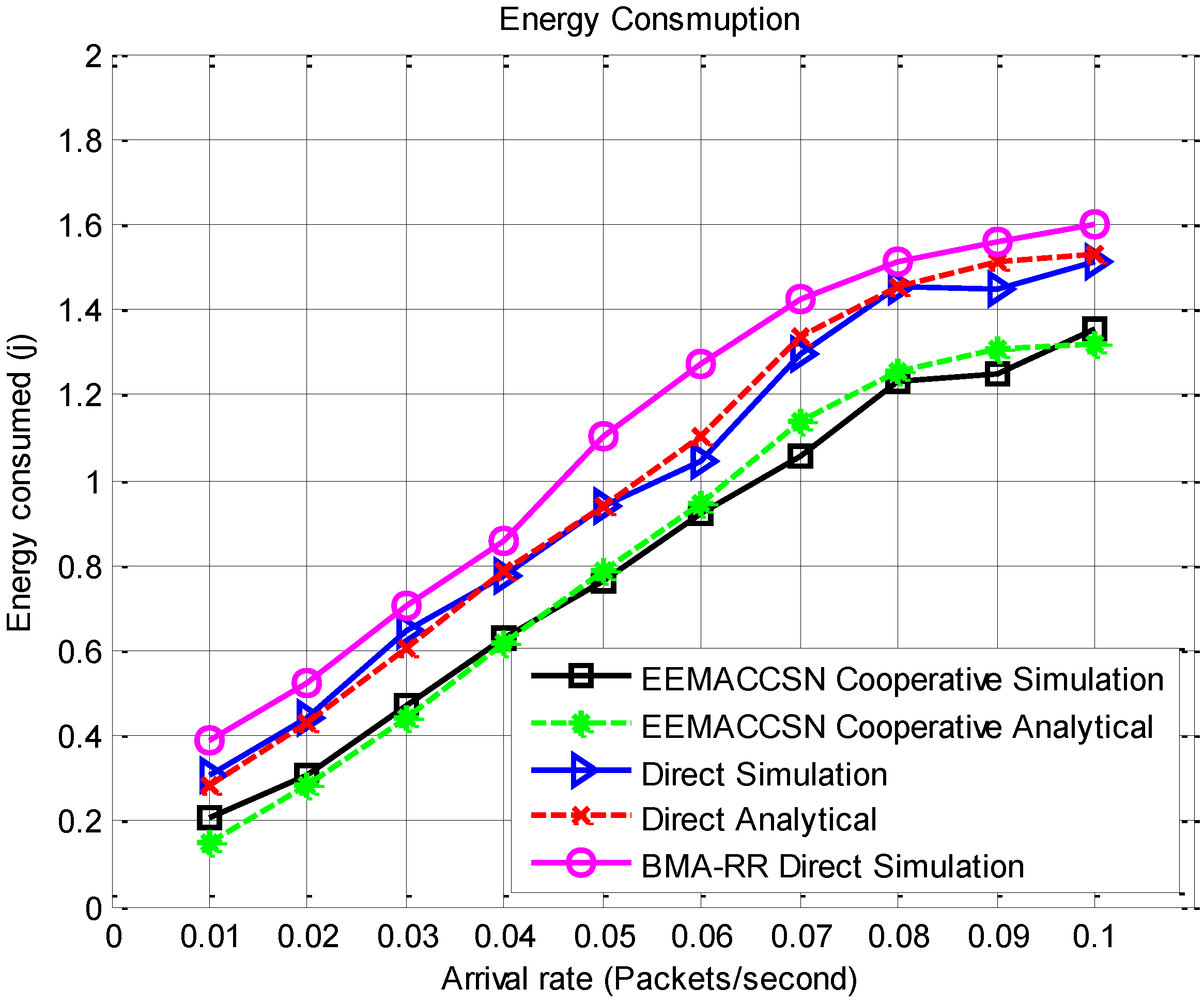
Figure 10 presents the performance of the proposed EEMACCSN protocol in direct and cooperative communication inter-cluster communication and the modified BMA-RR with direct inter-cluster communication. The results are for the complete protocol communication including communication within a cluster and between clusters and the base station. As observed, the energy consumption in the network increases with an increase in the arrival rate. The lowest energy consumer is the cooperative EEMACCSN, then direct EEMACCSN and lastly the modified BMA-RR for direct communication. EEMACCSN protocol improves the network energy consumption. This is due to the improved reliability by cooperative communication which reduces the probability of error occurrence in transmission reducing the need for packet retransmissions. The reduced number of retransmission means node spends little time in the active state leading to energy conservation. The analytical models are closely verified by the results as both the analytical and the simulation results are in agreement.
Figure 9.
Intra-cluster energy consumption per node vs. arrival rate.
Figure 9.
Intra-cluster energy consumption per node vs. arrival rate.
Figure 10.
Total energy consumption per node vs. arrival rate.
Figure 10.
Total energy consumption per node vs. arrival rate.
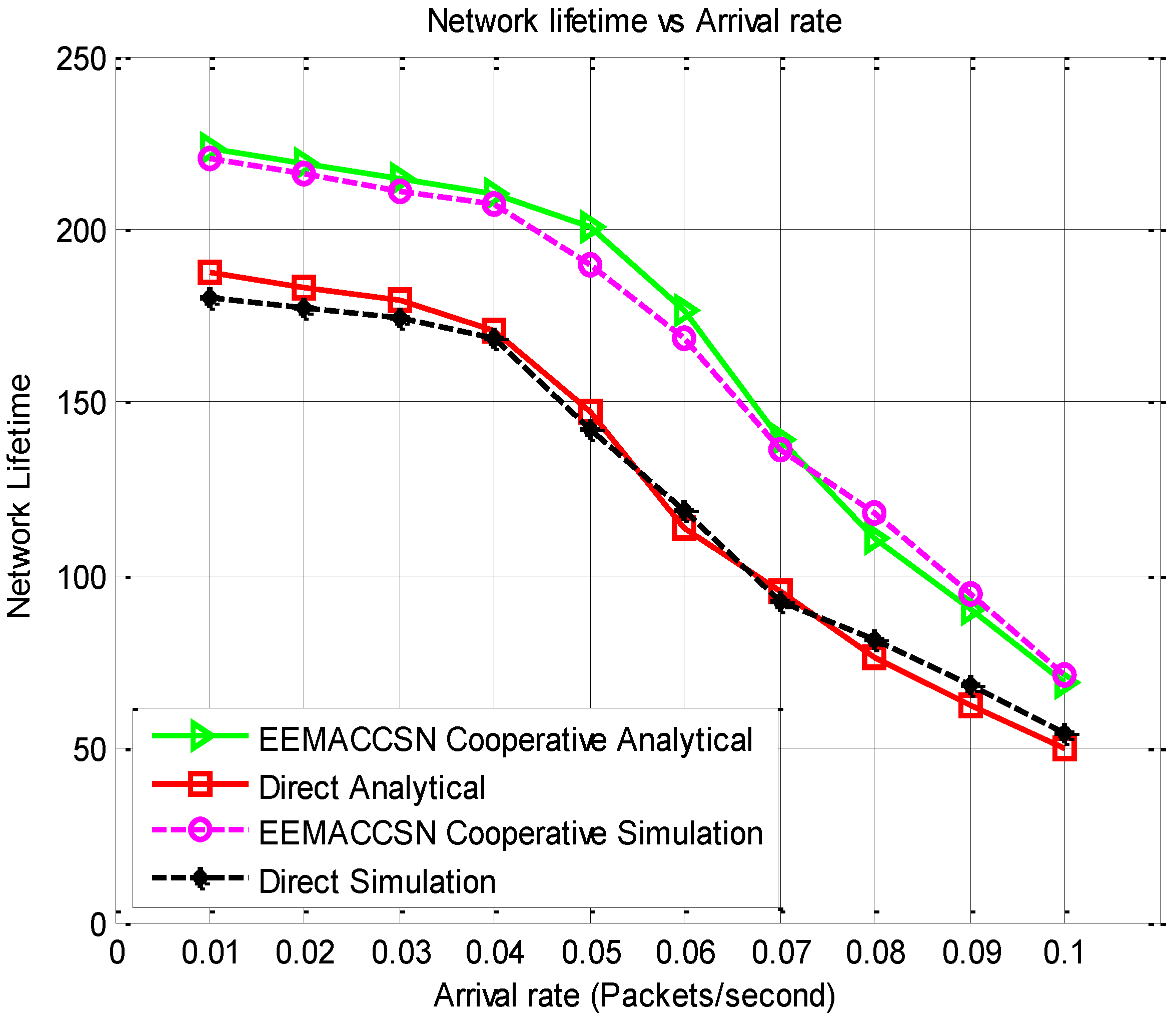
Figure 11 presents the network lifetime results of the proposed framework. The network lifetime depends on the energy consumption of the individual nodes as their lifetime determines the connectivity of the network. The higher the energy consumption on the sensor nodes the faster the nodes energy gets depleted, this has a direct impact on the lifetime of the sensor network. It is observed that the lifetime decreases with the increase in the arrival rate due to the fact that the nodes radio spend most time in the communication mode which consumes more energy on the sensor nodes. The lifetime of the developed EEMACCSN protocol with cooperative communication is longer than when direct communication is used. This is attributed to the high energy consumption in the direct communication, due to the high probability of retransmission occurrence since there is no measure to mitigate the fading effects of the wireless channels in direct transmission.
Figure 11.
Network lifetime vs. arrival rate.
Figure 11.
Network lifetime vs. arrival rate.
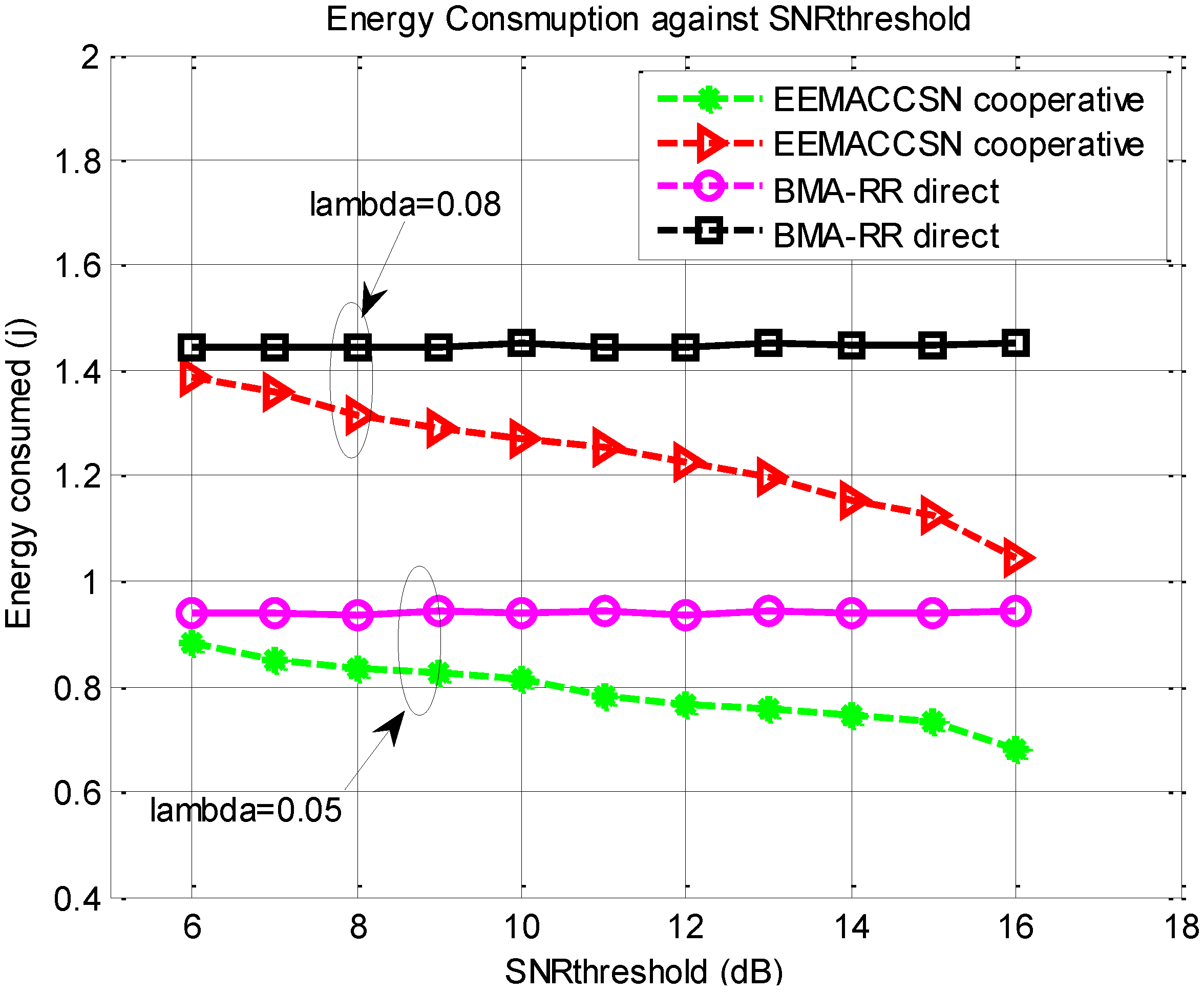
Figure 12 presents the energy performance of the proposed MAC protocol over variable SNR threshold with varying arrival rate settings.
Figure 12.
Energy consumption vs. SNR_threshold.
Figure 12.
Energy consumption vs. SNR_threshold.
For cooperative communication the energy consumption in the network decreases with the increase in the SNR threshold. The high SNR threshold means that the cooperative communication will often be employed in the network thereby improving the energy performance through the use of more reliable high capacity channels. However, for cooperative communication, the SNR thresholds in the system should be selected with great care, as they impact the way cooperative systems behave. Low thresholds result in unreliable channels as direct transmission is allowed, even when the received SNR is low, at the same time very high thresholds lead to delay and waste of energy, where additional nodes are used to cooperate while a single transmission would provide enough signal quality. For direct communication, as expected, the energy consumption is not affected by the SNR threshold, since the system does not check the threshold to decide on the communication. It is observed from the results the increase in the traffic load influences more energy consumption in the network. The proposed EEMACCSN protocol provides better energy performance with increasing SNR threshold than BMA-RR with direct transmission.
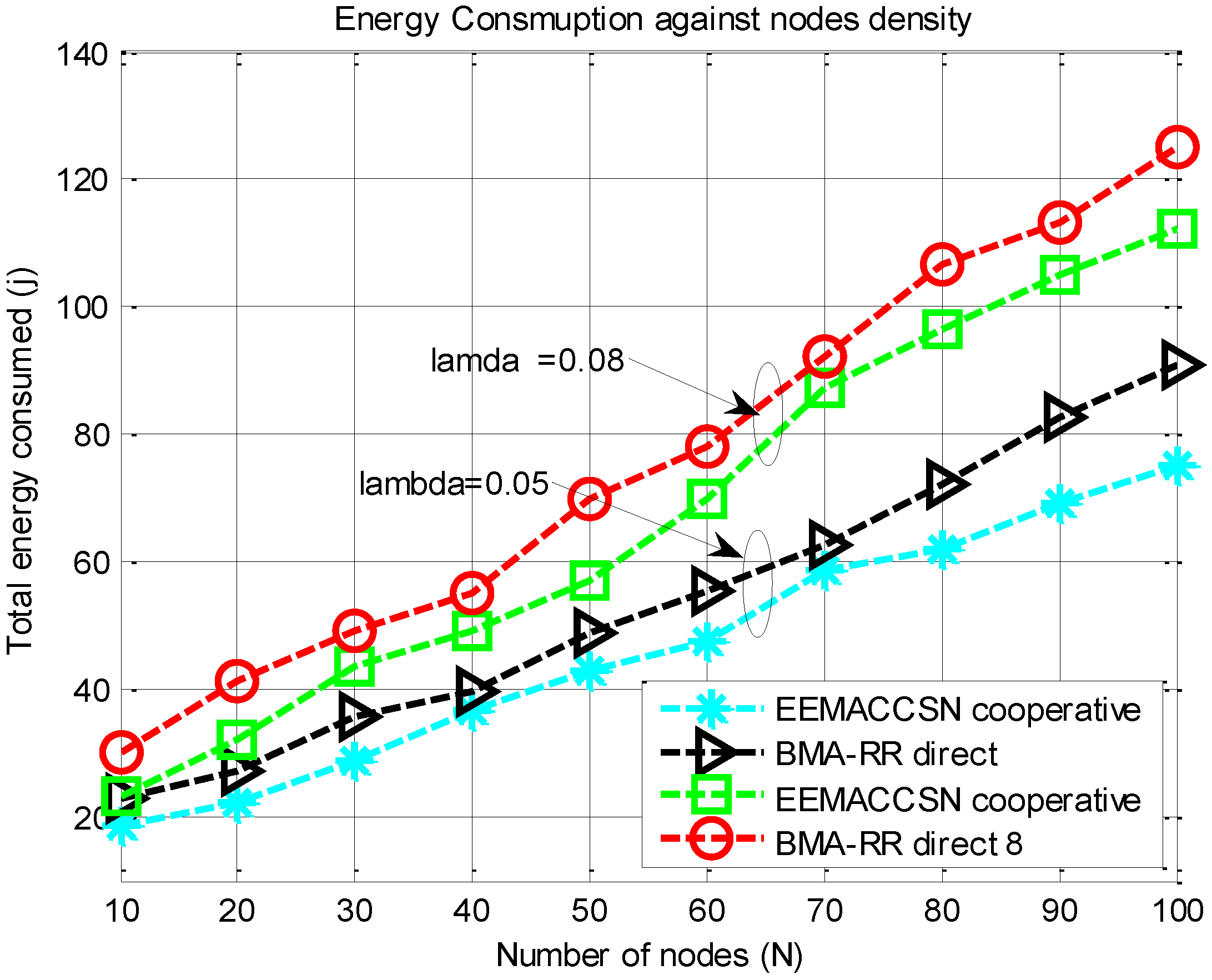
Figure 13 presents results for total energy consumption against increasing network node density for variable data arrival rates. As the network size increases, the interference and overhead for communication packets increases. The number of control packets transmitted to avoid collisions increases, leading to more energy consumption for transmission of communication packets. Increasing the number of network nodes also increases the likelihood of interference during packet transmissions, which reduces the SNR of transmitted packets, leading to more possible retransmissions for reliable communication. Also, since the arrival is independent on each sensor node, increasing the node density in the network increases the arrival in the network leading to increased total energy consumption.
Figure 13 illustrates that the EEMACCSN provide minimal energy consumption than the BMA-RR in response to node density, due to its better adaptive coordination of the medium access and its ability to improve the signal strength of the received packets at the destination through cooperation.
Figure 13.
Energy consumption against number of nodes.
Figure 13.
Energy consumption against number of nodes.
The results in
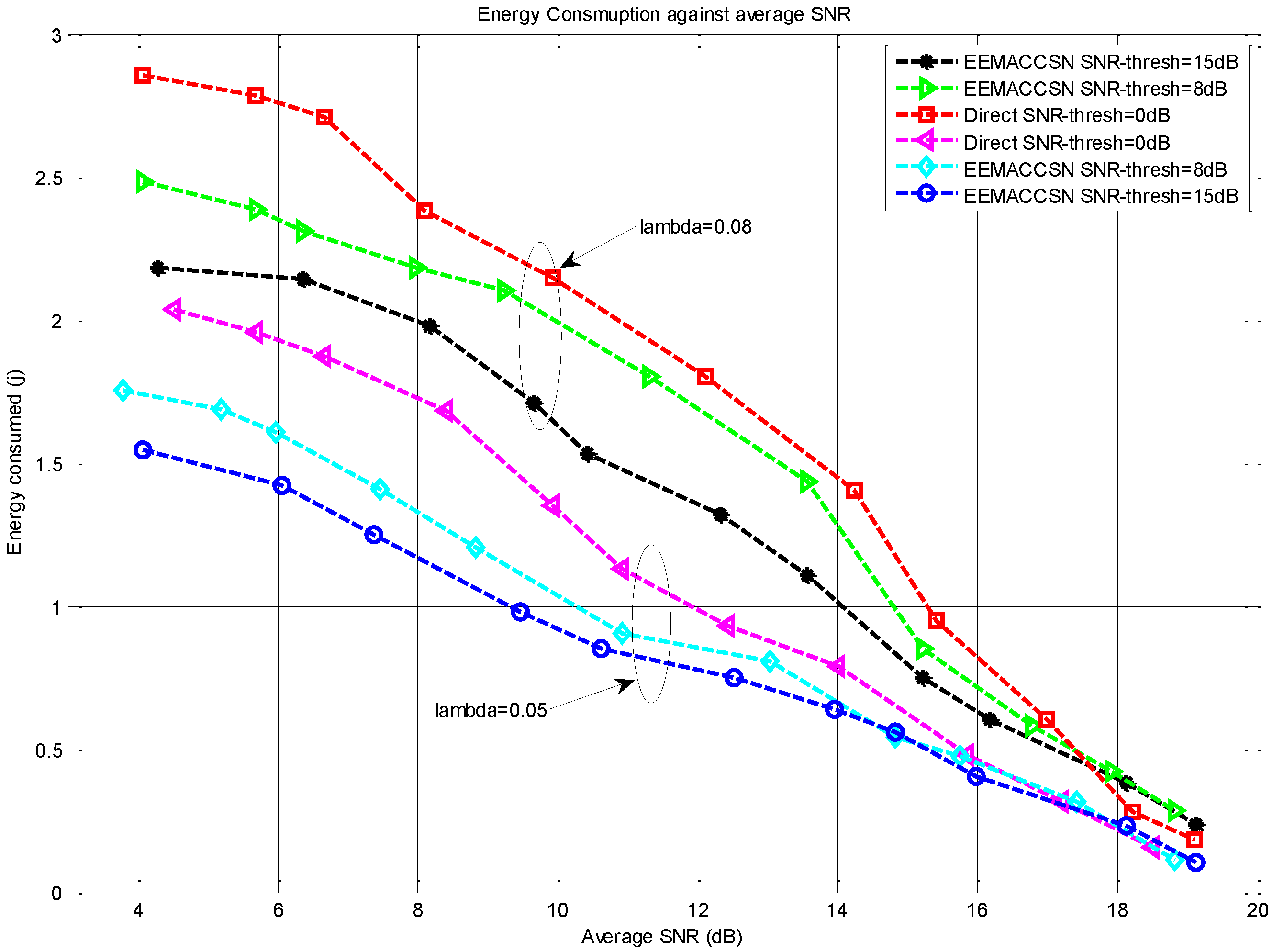
Figure 14 depict the behavior of the EEMACCSN against average received SNR in the network, for variable SNR thresholds. It indicates that the energy consumption reduces with the increase of the received SNR values, since the number of retransmission is reduced due to high channel quality. It is observed at low average SNR, the energy consumption of the high SNR threshold model is better, as it compensates the capacity of the channel by diversity, while others are prone to retransmission due to SNR values, resulting in more energy consumption due to retransmissions. At high average SNR values, the energy performance of all the models is the same in terms of energy, as they all fall back to the direct transmission model, and the energy consumption is lower due to the high capacity channel. Though cooperative channels are considered to be prone to signalling packets overhead, however their effect is minimal as cooperation is implemented only when direct communication fails at low SNR. At higher SNR cooperative transmission falls back to direct transmission cutting off the signalling overhead. Also the overhead of a small size signalling packet is smaller than the one caused by the retransmission of a communication packet on the direct low quality link.
Figure 14.
Energy consumption per node against average SNR.
Figure 14.
Energy consumption per node against average SNR.
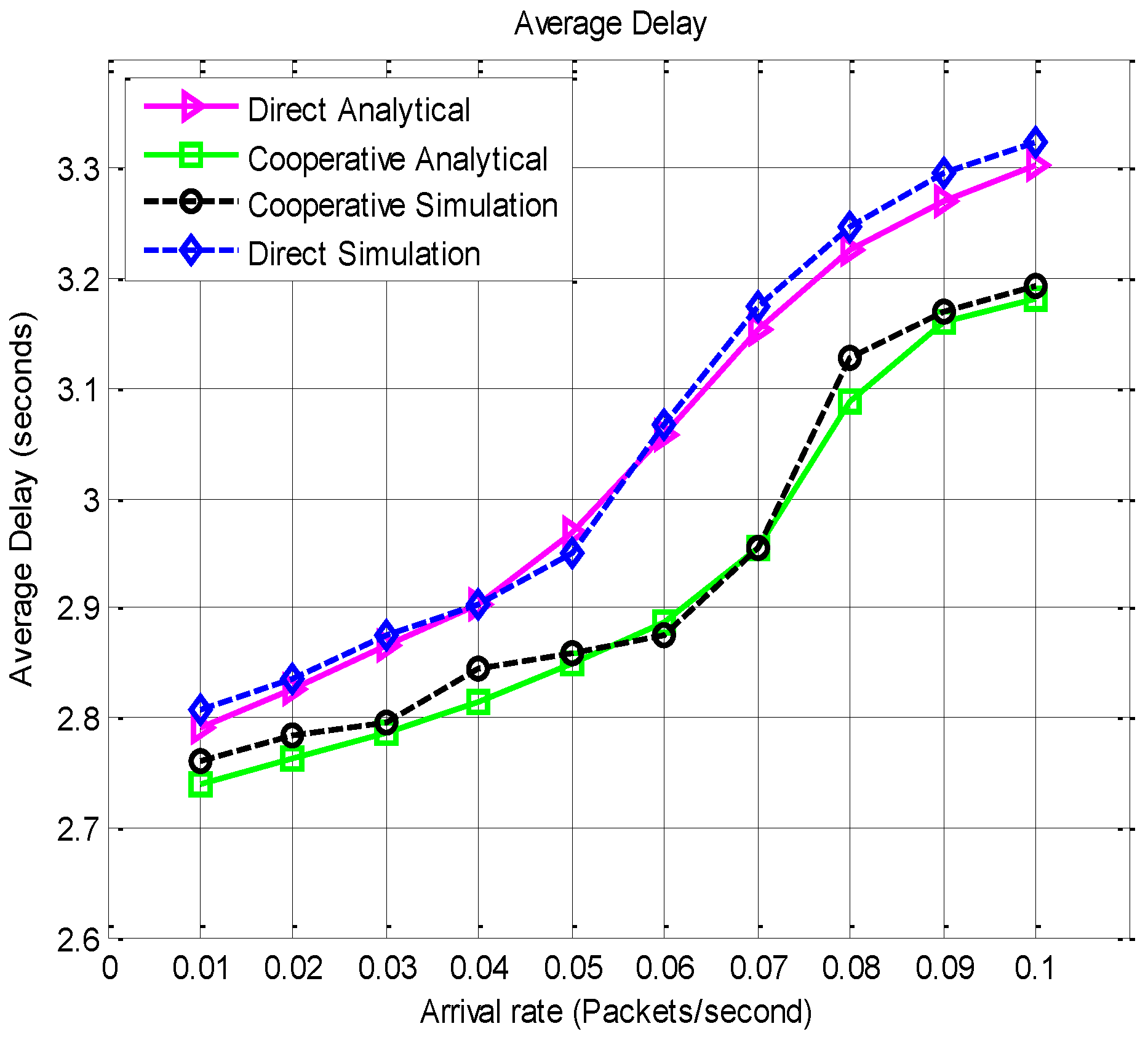
The average end to end delay performance results are presented in
Figure 15. The end to end delay is averaged as the time from inception to the correct reception at the destination, including the time for retransmission.
Figure 15.
Average end to end delay vs. arrival rate.
Figure 15.
Average end to end delay vs. arrival rate.
It is observed from
Figure 15 that the delay performance is better with the proposed MAC under cooperative communication. Though cooperative transmission adds another node and an extra slot in the transmission, it does however come with the benefit of reduced retransmission due to diversity and enhanced channel quality.
In
Figure 16 the throughput results are presented for EEMACCSN framework and the BMA-RR protocol with direct transmission for different number of communication sessions. It is observed form the results in this figure that a higher throughput is achievable if the number of sessions is high. This is due to the fact that the system spends most of its time in the transmit state, than when there are few communication session. It is also observed that with the use of cooperating channels the number of successful transmission increases. The results also show a steady throughput as the arrival rate in the system increases, indicating that throughput is also dependent on the systems available resources.
Figure 16.
Throughput vs. arrival rate, SNR threshold 9 dB.
Figure 16.
Throughput vs. arrival rate, SNR threshold 9 dB.
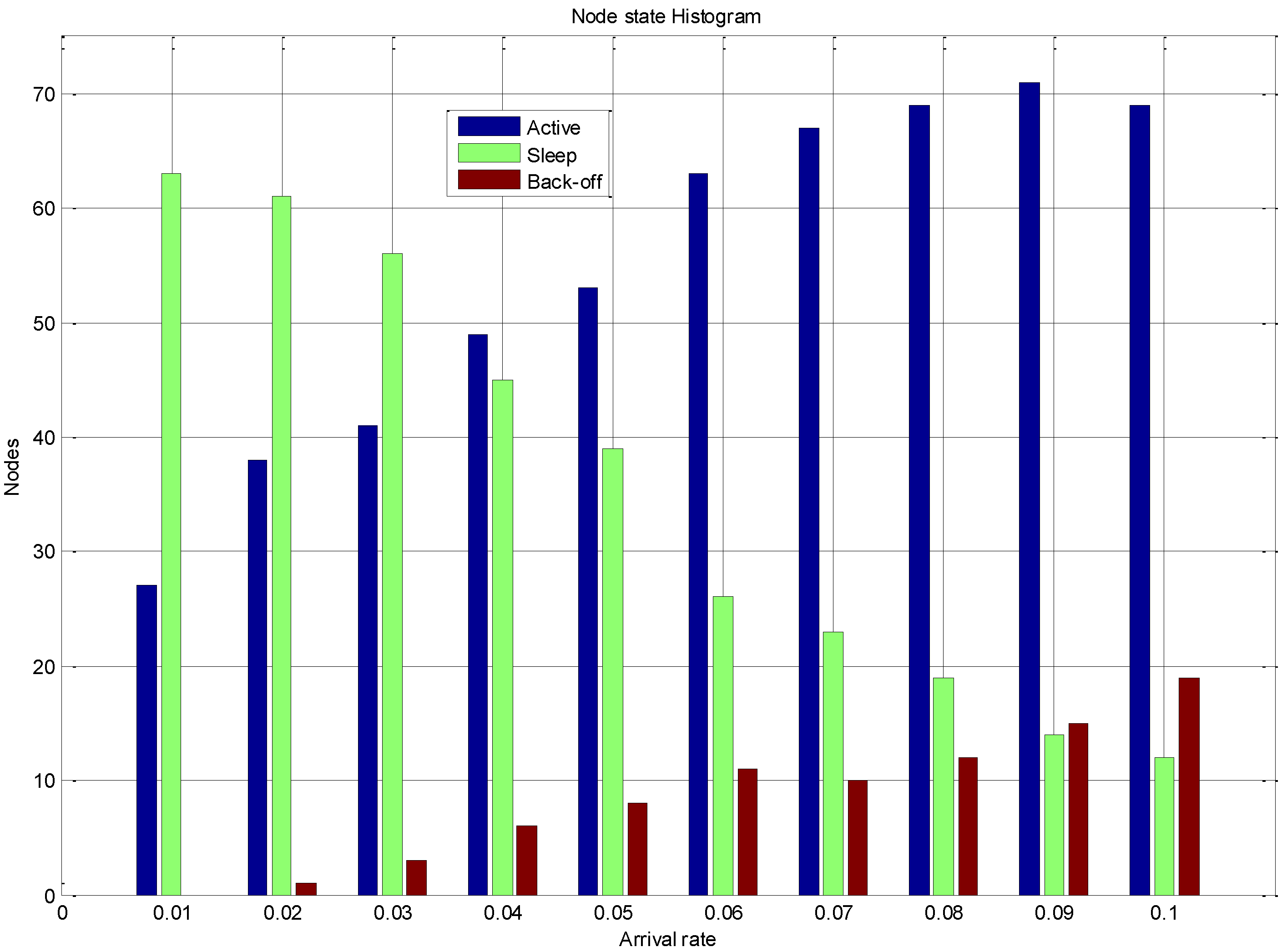
Figure 17 displays the dynamics of the system in terms of the nodes state for variable traffic rates. At high arrival rates, the number of nodes in the active state increases and in the back off state it also increases. This is due to fact that at high traffic rate most nodes have data to send, but only the nodes that have gained access to the channel transmit their packets. Also at low data rate it is observed that there are a large number of nodes in the sleep state. The nodes that do not have data to transmit are scheduled for the sleep state to conserve the energy during the communication frame. The traffic on the sensor node has an impact on the state behaviour of the sensor node, the nodes experiencing low data arrival rates have the higher probability of staying in the sleep and hence conserving energy resources. However the number of back-off state increases with the increase of the data traffic as more nodes contend for communication resources. The system dynamics further validate the energy consumption, lifetime and throughput results presented.
Figure 17.
EEMACCSN node state behaviour vs. arrival rate.
Figure 17.
EEMACCSN node state behaviour vs. arrival rate.
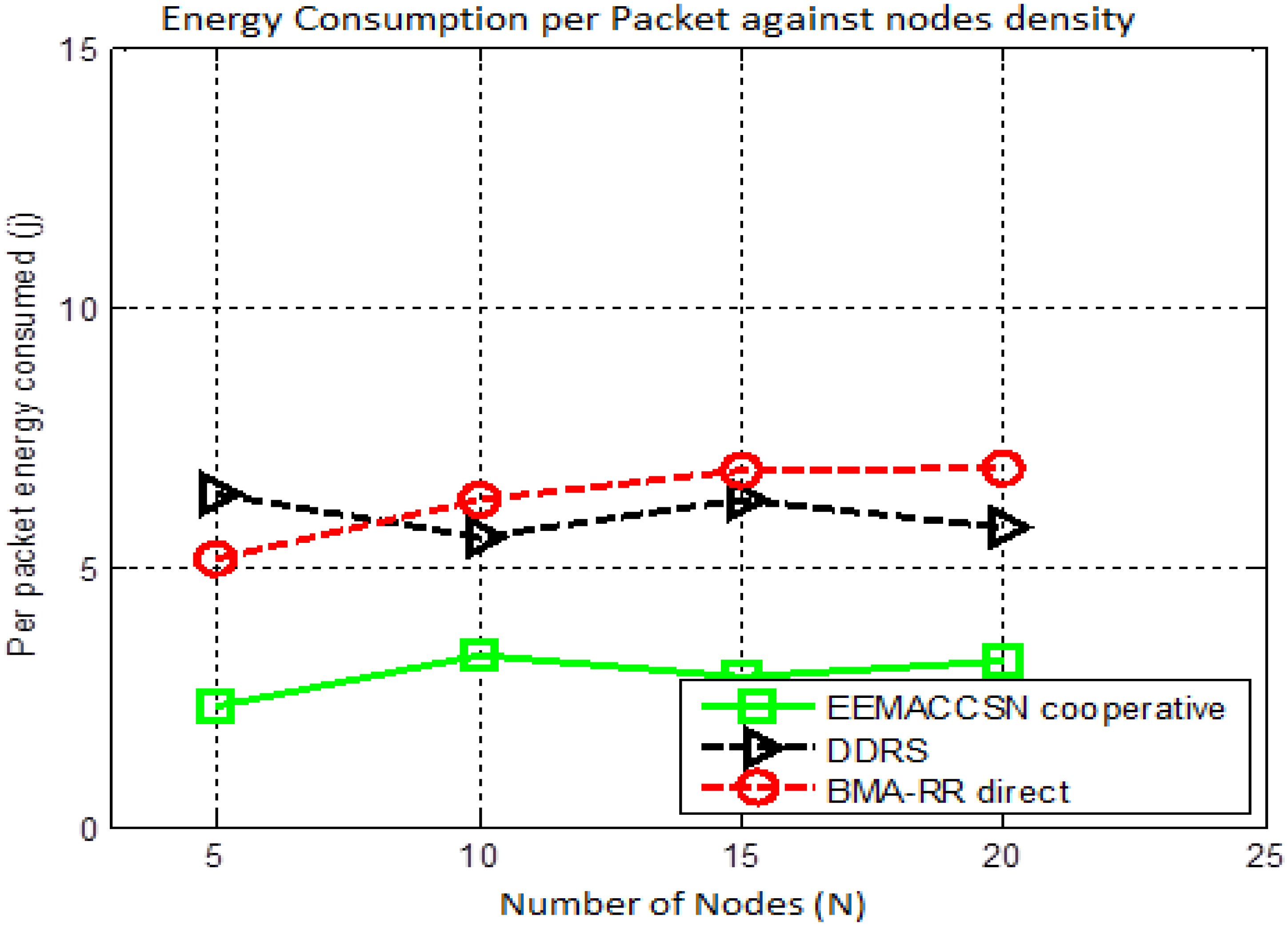
Figure 18 illustrates the system energy performance against the varying node densities in the network. The proposed system model performance is compared with a DDRS cooperative MAC [
30]. DDRS is a reactive cooperative MAC protocol employing cooperative transmission in the event that Direct Transmission Mode has failed. EEMACCSN and DDRS are both cooperative MACs, with EEMACCSN having a better energy performance. The results in
Figure 18 further demonstrate that a good MAC protocol design has great influences on the total energy consumption of the networks.
Figure 18.
Energy performance vs. number of nodes (N).
Figure 18.
Energy performance vs. number of nodes (N).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










