1. Introduction
Musculoskeletal disorders are one of the leading causes of physician visits and have a major impact on society in terms of long-term disability and economics. As the population is aging in several countries, these problems will rapidly increase in the future. This paper focuses on the problem of detecting abnormal human gait in walking mode in clinical medical practice. Because there is no exact definition of an abnormal gait, our work simply considers it as a significant deviation from the range of normal gait learned with a model. A gait cycle is thus considered abnormal if its normality likelihood (obtained with our trained model) is less than a threshold. Consequently, many solutions were proposed to estimate musculoskeletal conditions with the support of technologies. In particular, gait analysis has shown a lot of evidence demonstrating its potential for clinical medical practice. For that matter, many recent studies employ wearable infrared and/or acceleration sensors in order to measure physical parameters of human gait such as stride length or velocity. For instance, Greene et al. [
1] were able to distinguish patients with a history of falls based on a variety of parameters that are measured using body-worn kinematic sensors. Another example is the work of Chen et al. [
2] where human abnormal gait was modeled using a hidden Markov model (HMM) combined with information from sensors attached inside the shoes.
Although these approaches provide good accuracies since average success rate was 76.8% for [
1] and 88.6% for [
2], the device price could become an issue of concern. In addition, an important disadvantage is that it is inconvenient for the patients to wear these devices on their body. In order to avoid these limitations, vision-based techniques were proposed to perform gait analysis using data captured via calibrated RGB (Red, Green, Blue) cameras or devices with depth sensors (RGB-D cameras) such as the Microsoft Kinect (Redmond, WA, USA) [
3].
Some studies deal with gait analysis using only one camera. For instance, the authors in [
4] propose a clinical system to measure 2D angles between major body segments with an ellipse-based hierarchical tree structure. However, the system is limited to fronto-parallel (side view) gait only and does not provide fully 3D measurements. Therefore, we decided to use the Microsoft Kinect, a depth camera with built-in functions providing in-scene human skeletons. Although this camera works best with frontal view, the obtained skeleton, especially lower body joints, is acceptable at a reasonable (up to
[
5]) angle from a frontal view for gait analysis. Other researchers have relied on optical flow and variants. In [
6], the researchers employed optical flow, normalized flow histograms, principal component analysis (PCA) and variants of the Hausdorff distance together with the nearest neighbor technique for classification. One disadvantage of this approach is that it is time-consuming due to high computational cost. Furthermore, its generalization level cannot be guaranteed because the algorithm was tested with two datasets consisting of only one subject each. Finally, 3D information is not available. In [
7], the silhouette shape is encoded using lattices. They are incorporated into a temporal context by basically concatenating feature vectors obtained for each frame. Each movement pattern is then classified using a support vector machine (SVM) algorithm. The accuracy in determining unusual motion was around 70%–80% but could be impaired significantly by outlier frames resulting from ambiguities due to the 2D projection of the body and loss of 3D information.
Other approaches use 3D information for better gait analysis. For instance, Stone and Skubic [
8] extracted gait cues based on the human silhouettes captured via a pair of calibrated cameras or a Kinect camera. In a sequence of frames corresponding to human walking, the positions of footfalls are localized based on such 3D reconstruction (pair of cameras) or depth information (Kinect). Temporal and spatial gait parameters are then estimated. Our approach also employs 3D information, but this is extracted from the skeletal model provided by the Kinect. The skeletal model was not used in [
8] because its estimation is possible only in a limited range that was insufficient for in-home monitoring.
Finally, other methods take full advantage of the 3D skeleton provided by the Kinect. Paiement et al. [
9,
10] proposed an online system for estimating the movement quality from Kinect skeleton. They built a statistical model for representing the normal movement which was captured from healthy subjects. The assessment stage was then performed based on each frame as well as each sequence following Markov assumptions. The study [
10] evaluated four models including three discrete-state HMMs and a continuous-state HMM. Our model is closer to the first one (named
in [
10]), the main difference being the discrete (vs. continuous) nature of observations in our approach. In summary, our approach also uses 3D skeleton together with Markov model, but there are some differences compared with the two mentioned works. First, our work focuses on detecting abnormal gait in walking while studies [
9,
10] tried to build models of normal gait in different activities (e.g., walking up stairs, standing up and sitting down), thus our features for representing gaits are extracted based on only lower body joints instead of all possible joints. Second, HMMs with discrete observations are employed in our work instead of continuous ones for easier implementation and interpretation. In [
11], skeleton poses were employed to detect abnormal gaits. The key of this research is that a set of consecutive skeletons is represented by a spatio-temporal feature, which is determined based on 3D position of joints together with the motion’s age. Although this approach provided good experimental results, it is difficult to obtain a similar accuracy in practical situations. Extracting each spatio-temporal feature based on a specific number of consecutive skeletons may lead to incorrect detection in subjects which perform the same gait but with different movement velocities.
Our approach aims to overcome the previously mentioned disadvantages. We assume that a human posture can be well assessed by the corresponding 3D skeleton, and a sequence of such skeletons can represent the gait and motion information. We then propose an approach to build a normal human gait model in order to detect anomaly in human walking. The input of our system is the human skeleton and 3D joints provided by the Microsoft Kinect. These parameters are determined based on the depth map estimated by emitting a structured infrared (IR) light pattern observed by a single IR sensitive camera (version 1 of the Kinect). The depth image is generated at 30 fps with acceptable resolution (640 by 480), and is not affected by changes of visible light. The posture corresponding to each frame is described by joint angles and related joint-planes of the lower body. The contributions of our work include (1) extracting relevant skeletal features that are helpful in distinguishing normal and abnormal gaits; (2) describing a simple gait cycle identification method; (3) using a simple and fast HMM-based algorithm with discrete observations, i.e., codewords, for online classification; (4) proposing a low-cost and easy to use Kinect-based gait analysis system for a clinical setting; and (5) confirming accuracy of abnormal gait detection by evaluating it on a large number of gait types from several databases and comparing it with a state-of-the-art study [
10].
The rest of this paper is organized as follows:
Section 2 explains the main idea for solving the abnormal gait detection problem; details of our approach are presented in
Section 3;
Section 4 shows experimental results and discussion; and conclusions are given in
Section 5.
2. Sequential Abnormal Gait Detection
In a sequence of walking images, the most easily observed information is the instant gait at a specific time
t, which is called atomic posture
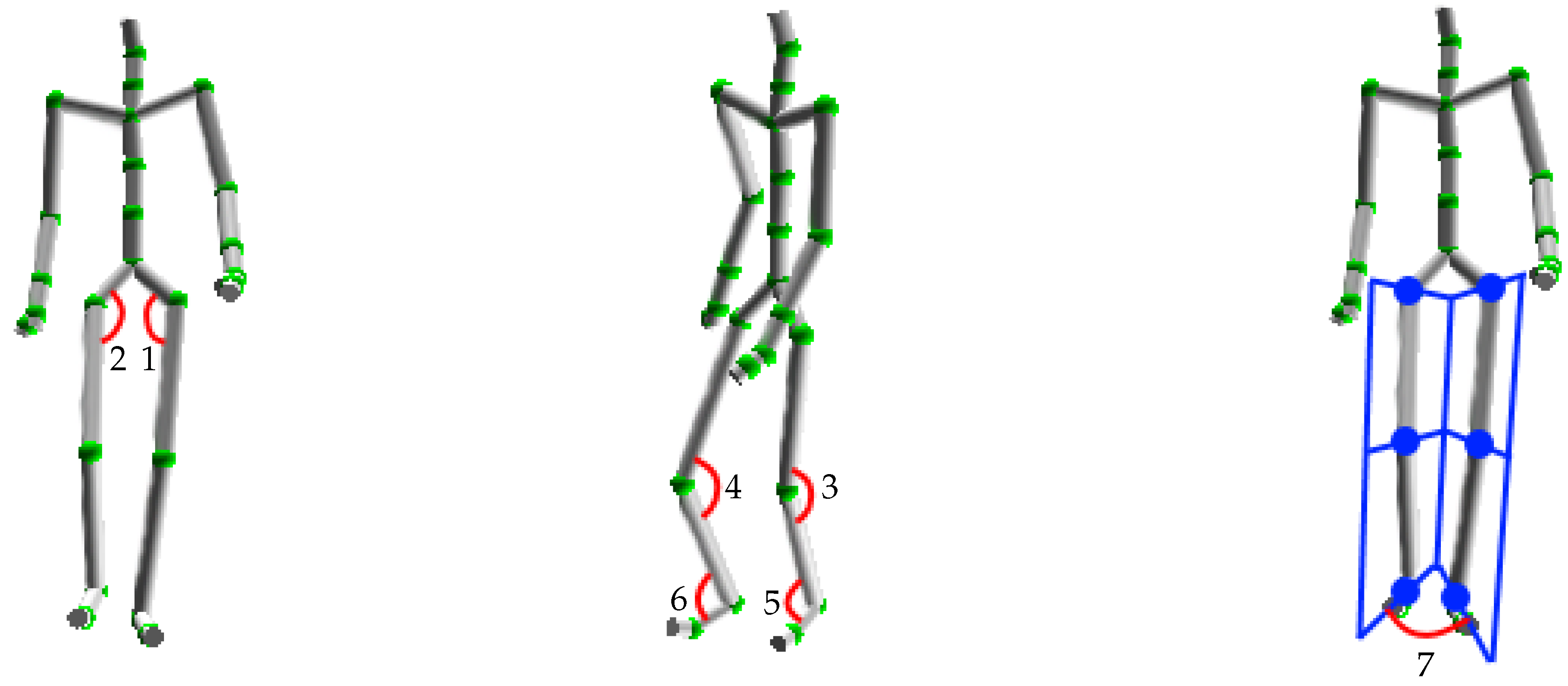
. Typically, each such posture describes the orientation, position and relationship between pairs of consecutive bones of the walking person in the corresponding frame. It is the basic unit for representing human gait. However, extracting features related to all bones in the human skeleton would be unnecessary. From inspecting exemplary sequences of gait, it appears that relations between lower-body parts, including ilium, femur, shin, and legs, provide reliable cues to distinguish regular gait from any kind of anomaly. In most of normal gaits, the instant human posture satisfies some rules, e.g., joint angles fall in specific ranges depending on the type of joint of interest. Research and observations regarding human action analysis have shown that each person performs a walking pattern in a fairly repeatable way [
12], e.g., the variation of each joint angle is relatively cyclical. In addition, periodic and symmetric movement of leg’s parts can be seen in normal walking motion, and the left and right limbs alternate their movement, whereas abnormal gaits tend to be more aperiodic and random.
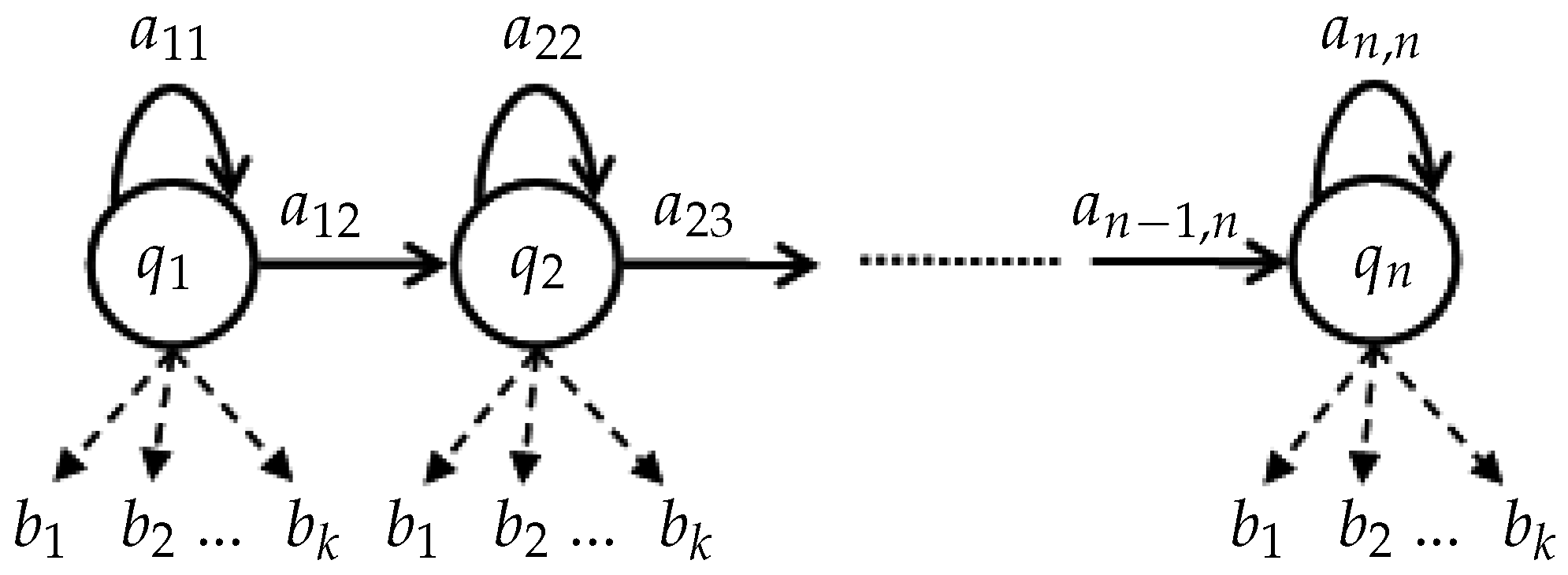
Moreover, a walking anomaly may consist of a sequence of normal poses. In other words, the information of instantaneous posture taken alone at each frame may not be sufficient to determine the type (normal or abnormal) of gait because gait is a temporal phenomenon. For example, a person with a left leg pain could move this leg more slowly with respect to the right leg but each individual posture could still be normal. Therefore, we consider concatenated feature vectors corresponding to a gait cycle to incorporate the temporal context into the gait evaluation. Each such cycle is represented by a series of codewords that represent skeleton-based feature vectors extracted from . A gait cycle is assumed as anomaly if the corresponding likelihood, which is estimated from an HMM model, is less than a learned threshold. Our proposed algorithm is presented in the next section.
4. Experiment
Our testing system was implemented in C# language using an Accord.NET Framework [
19]. We employed two datasets including a collection of mocap data and sequences of Kinect skeleton. The former is provided in [
20], while the latter was recorded in our laboratory by five volunteers (Subjects 1–5 in
Table 2) with different body shapes in a realistic environment. The mocap represents eight gait types including normal and seven abnormal ones obtained from 20 subjects. The number of walking cycles in this dataset is 2137 according to our method in
Section 3.3. Our Kinect dataset, which was captured on a straight walkway, consists of three gait types which are normal, left-right asymmetry, and hunched back gaits. The first gait type was recorded when volunteers were walking normally. The second one was acquired with a simulated pain in the knee. In this case, the injured knee could not flex when walking normally. Therefore, the body centroid tended to tilt on the other leg, and the stride length was significantly different between the two legs. The third gait type was performed with a simulated low back pain, in which the human body bended forward and one hand was placed behind the back, and thus the body centroid was more forward and switched continuously between the two legs during walking. Note that the arms were sometimes localized incorrectly by the Kinect, but it did not affect our processing since only the lower-body parts were analysed. These three gait types are illustrated in
Figure 5.
The number of gait cycles corresponding to each gait type is presented in
Table 2. Note that these cycles were decomposed using our proposed technique, unavailable in the two datasets. It is obvious that mocap systems certainly provide less noisy data than the Kinect. However, these gait measurement systems are costly and generally require manual examination, calibration procedures, and the precise placement of sensors/markers on the body of the patient. On the contrary, depth cameras such as the Kinect provide a low-cost, markerless and calibrationless system alternative that is very promising for gait analysis as well as more general 3D human motion assessment. Consequently, our system is low-cost, and easy to use and offers a promising tool for a wide range of applications for gait analysis. As will be demonstrated in this section, the proposed approach can cope with the noisier data generated by the Kinect. In addition, other studies such as [
9,
10] have worked successfully with depth camera for gait analysis.
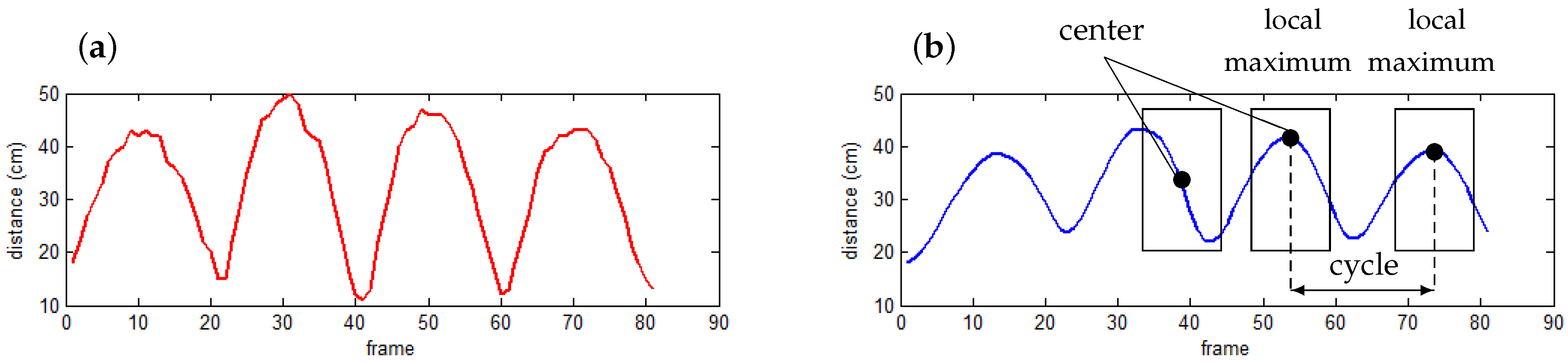
The model of normal walking gait was built based on 3/4 the number of normal gait cycles recorded by Kinect, and were selected randomly. Our testing process was performed on the remaining normal gait cycles and all abnormal gait types (445 normal cycles and 2208 abnormal cycles). In our experiment, the smoothing factor
α in Equation (
1) was set to 0.2 in order to remove noise while keeping the global shape of the graph of distance values. The constant
λ in Equation (
2) was set to
, which corresponds to the 10th percentile for a Gaussian distribution. The size of the sliding window in our system was assigned to 5. The optimized solution for HMM parameters was found empirically by testing our approach with different sets of HMM observations (equal to
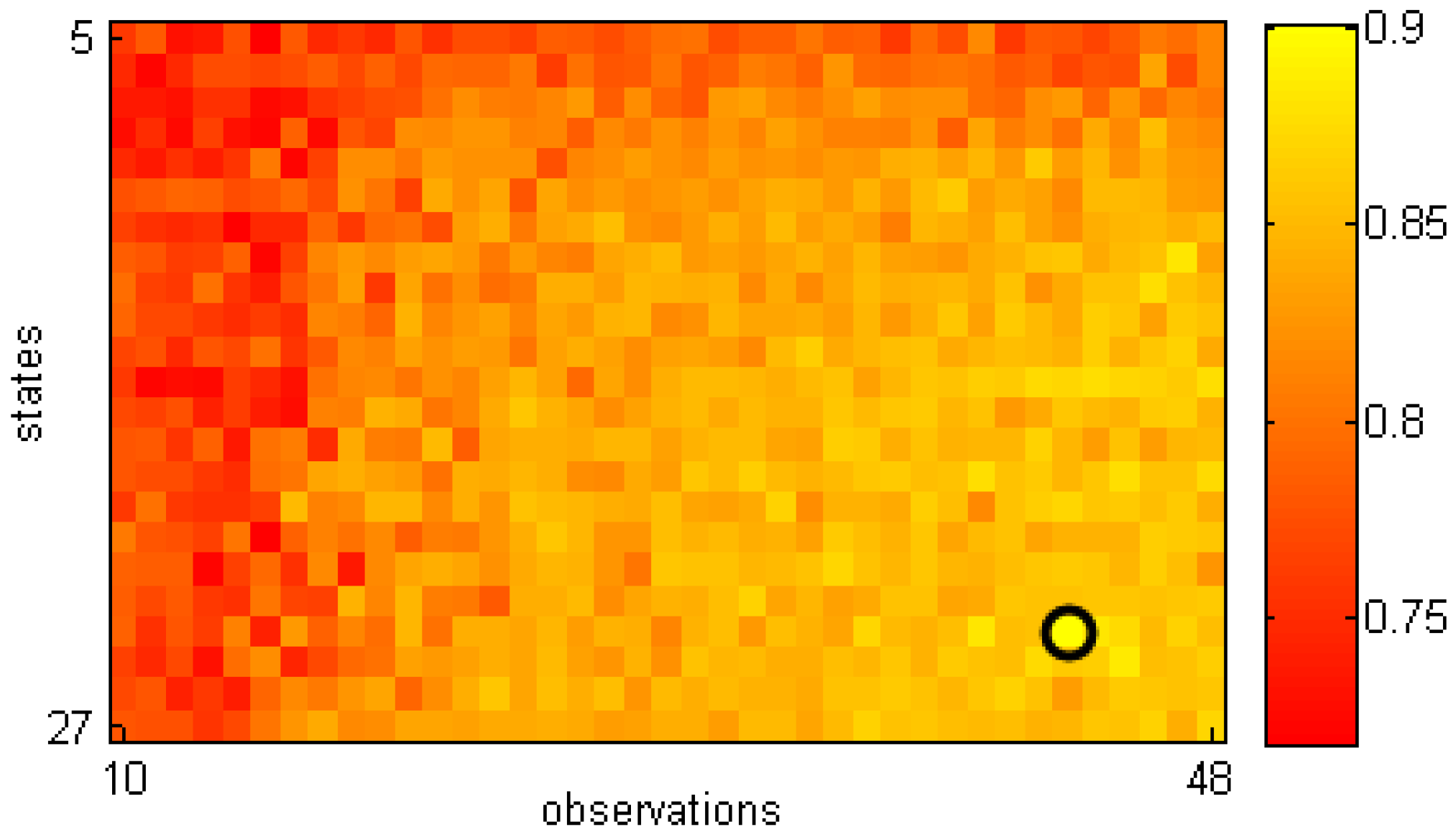
k in the clustering step) and states in order to obtain the best classification accuracy. The overall results corresponding to 897 HMMs are shown in
Figure 6. The best accuracy was 90.12% when the model had 43 observations (codewords) and 24 states. Using a larger number of states and/or observations would also increase the computational cost, thus impairing online detection. In these experiments, our system gave an online classification result immediately after completion of the gait sequence. In addition, our HMMs still work well with new subjects, i.e., without gait template in the training set.
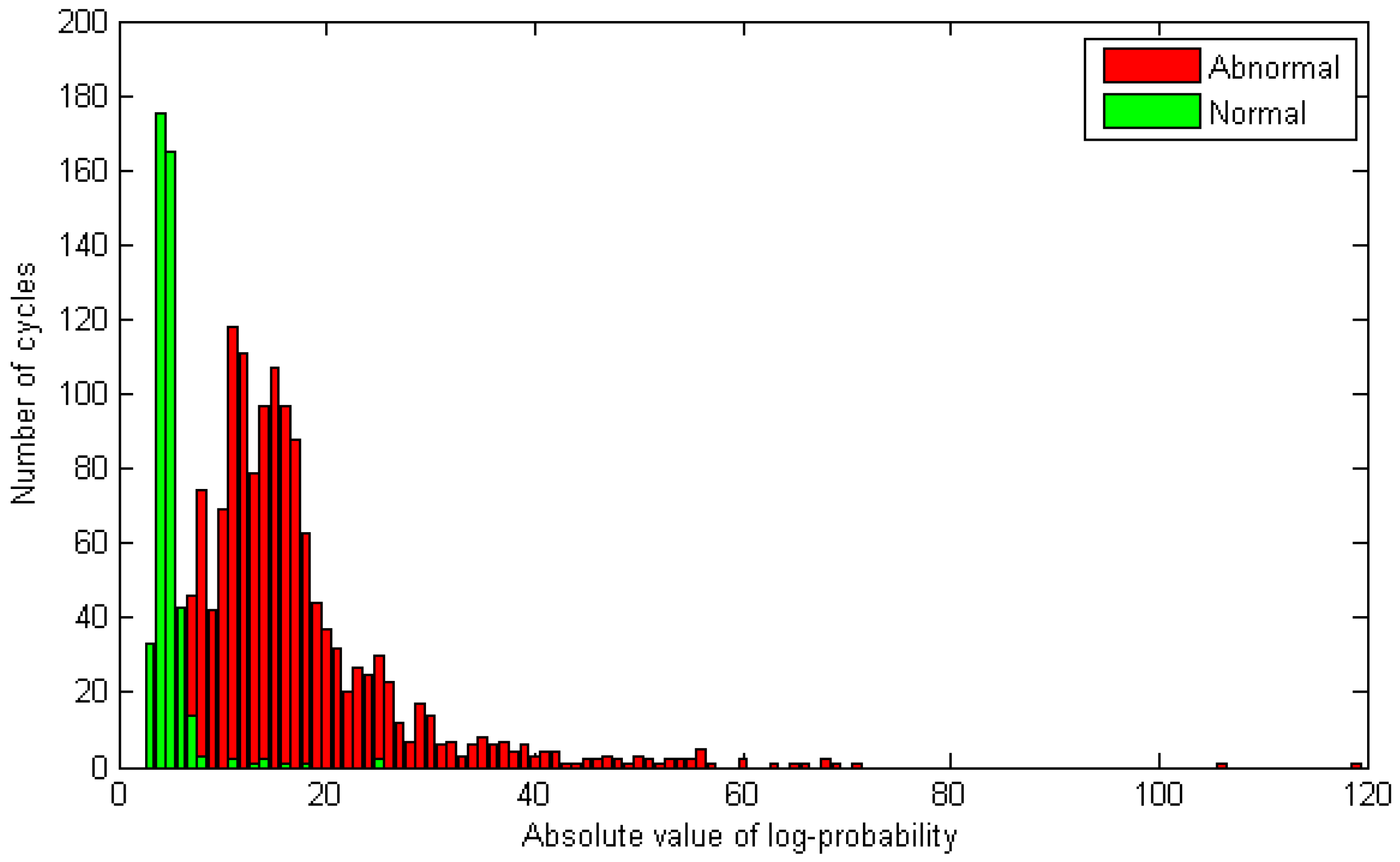
From now on, we consider only the best model. The absolute values (for better visual illustration) of log-probabilities corresponding to normal and abnormal gaits are shown in
Figure 7.
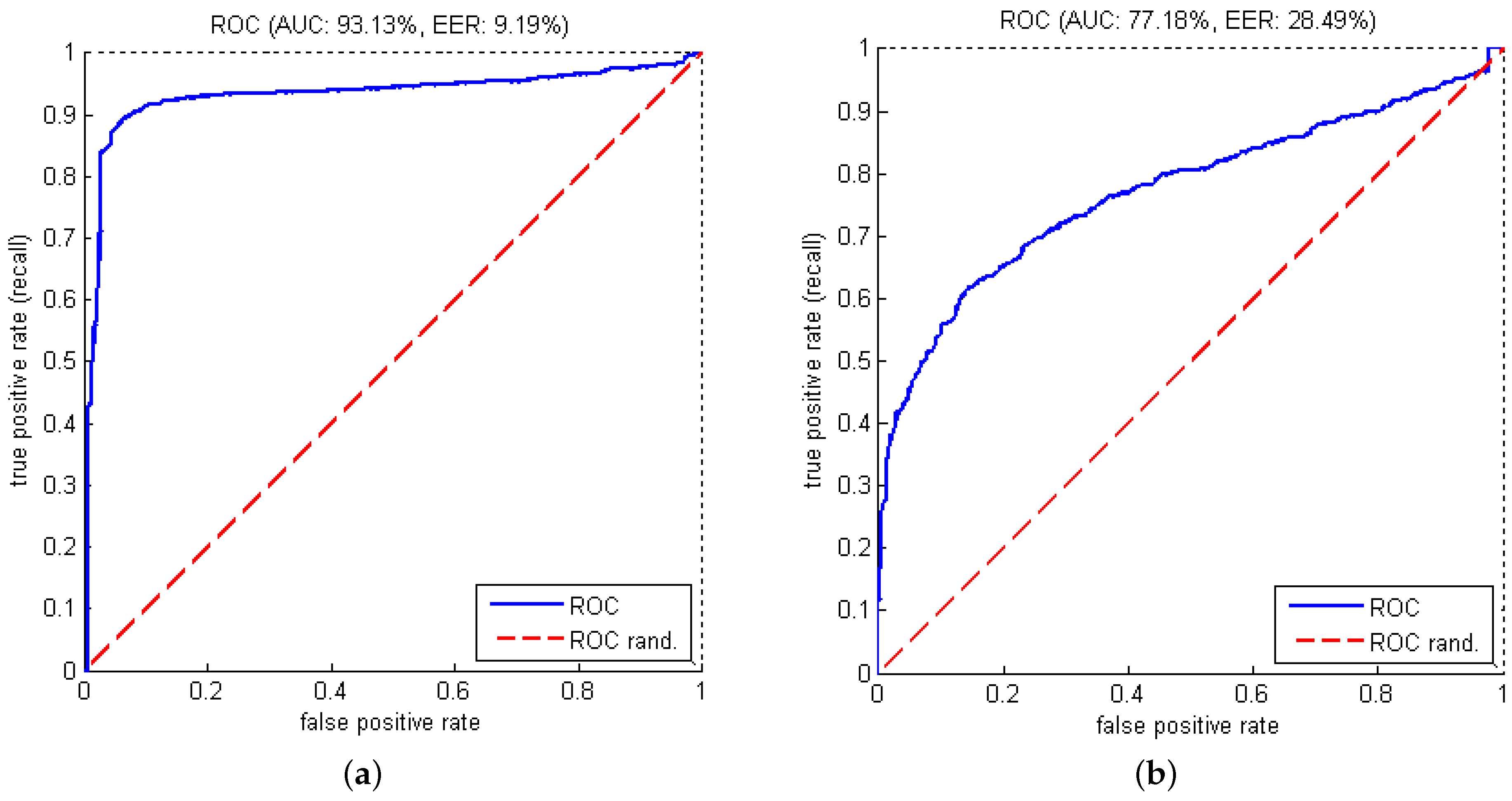
The correct detection of normal cycles (specificity) and abnormal data (sensitivity or recall) were 93.48% and 89.44%, respectively. Precision, F1-score, EER (Equal Error Rate) and AUC (Area under the ROC (Receiver Operating Characteristic) curve) are also shown in
Table 3. The ROC curve generated with different thresholds is displayed in
Figure 8a.
As shown in
Table 3, the ability of gait assessment with the Kinect data was slightly less than the mocap one, but was still quite good. In other words, these measures confirm that our approach can cope with the noisy data generated by a low-cost device such as the Kinect.
Some studies on problems related to temporal factor such as gesture classification [
21] and word recognition [
22] showed that DTW outperforms HMM in their experiments. Therefore, in our work, we also performed a test with DTW in order to provide a comparison with our HMM-based method. In this test, the clustering stage was done with 43 clusters (similar to the best HMM in our experiments). The obtained results are represented as the ROC curve in
Figure 8b. It is obvious that our HMM is significantly better than DTW in detecting abnormal human gaits. A detailed study for comparing HMM and DTW on different problems would be interesting in the future.
We also performed some experiments on the dataset SPHERE-Walking2015 used in [
10] that includes 40 sequences of 10 individuals with normal and abnormal (stroke and Parkinson) gaits on a flat surface. However, the skeleton of that dataset contains only the 15 joints provided by OpenNI SDK (Software Development Kit) (we had 20 joints with the Kinect version 1 SDK). This means that some of our features (#5 and #6) could not be measured. Nevertheless, we conducted experiments with the five remaining features and have reported our results in
Table 4.
We used the same training and testing sets as in the work [
10], but cycle segmentation was performed based on our approach since the dataset does not provide them. The method in [
10] evaluates the whole sequence while our approach process each gait cycle separately. This means that we had to extract each gait cycle first (
Section 3.3). It also means that for any sequence, we got as many evaluations as there were gait cycles. Therefore, to compare with the results in [
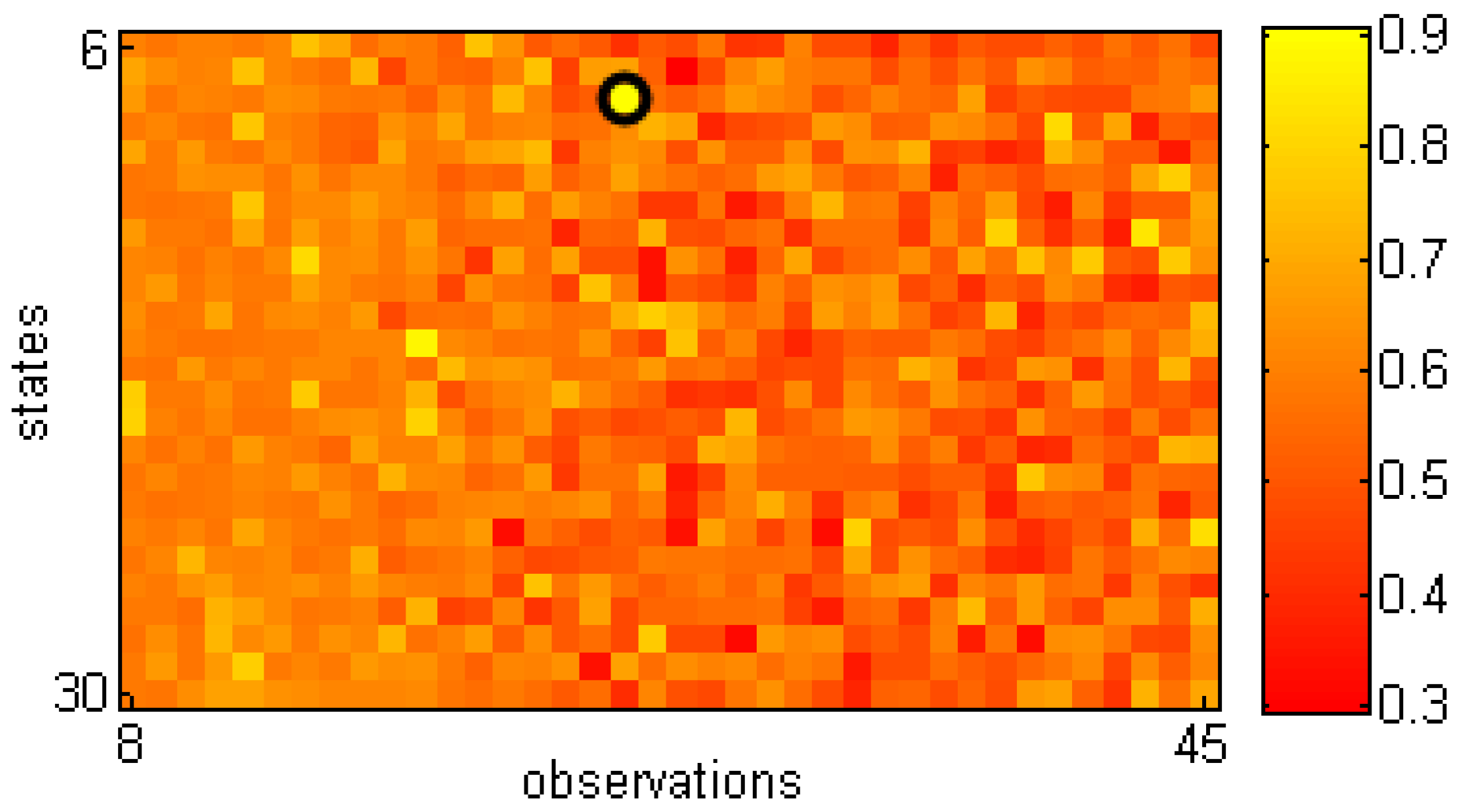
10], in our experiments, mean values of log-likelihoods corresponding to three consecutive cycles in each sequence were computed, and the smallest one was used to represent each sequence. This is a reasonable choice since it looks for a significant abnormality within the sequence for providing a decision. Furthermore, this can be applied on sequences of various lengths in term of the number of gait cycles. The value of 3 was set to reduce the effect of noisy cycles. As in [
10], AUCs with different HMMs (in terms of the number of states and observations) were computed and are shown in
Figure 9. The highest AUC for assessing the gait types was 0.91 with eight states and 25 observations.
Some statistical measurements corresponding to the best accuracy obtained from the mentioned HMM are given in
Table 4. These overall results show that our approach could provide good gait assessment.
Table 5 shows AUCs reported in the work [
10] on the same dataset for the best models. This measure ranged from 0.79 to 1.00 with different HMM types, manifold dimensions, and feature ensembles. However, notice that the AUCs were not computed in the same way for both methods. The measure of [
10] is harsher and therefore their results would appear artificially lower. Because our normal gait models for this dataset were built based on five of the seven proposed skeletal features, our approach thus could be expected to retrieve better results when working with the full lower body skeleton. Another comparable aspect between our study and the work [
10] is the speed of execution. Since all models and experiments in [
10] were done using Matlab (2012b, MathWorks, Cambridge, MA, USA), we rebuilt our system in this language and computed the average processing time per frame. The obtained value on a laptop with an Intel i5-6200U CPU 2.8 GHz processor (Santa Clara, CA, USA) and 12 GB RAM was 0.4 ms, while the corresponding measures in [
10] with a more powerful workstation (Intel I7-3770S CPU 3.1GHz processor and 8 GB RAM) were 15.99, 16.27, 30.16 and 153 ms with increasing model complexity. The main reasons for our faster computation are that (1) extracted features were significantly simpler with less joints compared to [
10]; (2) discrete observations were used in our work instead of continuous one; and (3) our model estimated the likelihood on each gait cycle independently without using all other previous frames. Therefore, our approach could be suitable for practical applications that require a fast computation.
5. Conclusions
In this paper, we propose an approach for abnormal gait detection without prior knowledge about anomaly in human walking. Our work focuses on a low-cost and easy to use gait analysis system for a clinical setting. This system is fully automated, with no markers or sensors on the patient’s body, no calibration and no manual intervention. It can detect abnormal gaits and provide a normality index (likelihood) if needed. In addition to neurological/musculoskeletal disorder screening, it could enable clinicians to perform a follow-up of patient’s recovery after surgery, treatment (e.g., joint replacement) or after a stroke. Our results show that our system is a promising tool for gait analysis. This method is applicable to many different gait types. The contributions of our work include (1) extracting relevant skeletal features which are helpful in distinguishing normal and abnormal gaits; (2) describing a simple gait cycle identification method; (3) using a simple and fast HMM-based algorithm with discrete observations, i.e., codewords, for online classification; (4) proposing a low-cost and easy to use Kinect-based gait analysis system for a clinical setting; and (5) confirming accuracy of abnormal gait detection by evaluating it on a large number of gait types from several databases and comparing it with a state-of-the-art study [
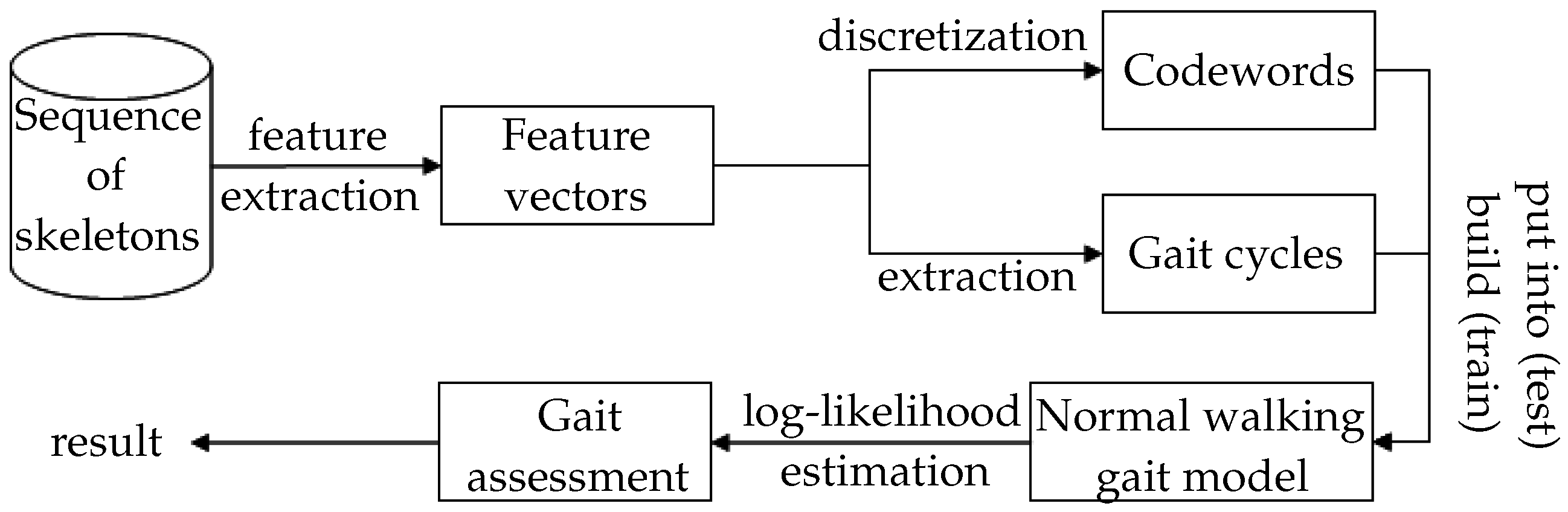
10]. Our system consists of four stages. First, seven joint-related features are extracted from the human skeleton in each frame. Second, the
k-means clustering technique is employed to perform vector discretization. The cycle extraction step is then implemented based on the distance between the feet. Finally, a model of normal gait and a threshold is created in order to assess the normality level (likelihood) of a gait cycle. Experiments on 10 types of human gait, including normal and nine different abnormal ones as well as on datasets in the work [
10] show that our model provides excellent results for distinguishing normal and abnormal walking gaits in terms of performance metrics (see
Table 3 and
Table 4 with a dataset of [
10]). For instance, usually a AUC greater than 0.9 is considered as excellent classification. This is comparable to the best state-of-the-art algorithms such as [
10]. Besides the ability of gait assessment, the fast computation speed is also an advantage compared with [
10]. In addition, our method provides immediate results to inform the patient after his/her gait test to help relieve anxiety and for those who are diagnosed as abnormal to quickly start treatment or further analysis. It also allows screening more patients at a minimum cost. Finally, our method could be easily integrated within a larger gait analysis system since it is not time-consuming.
In summary, the experiment shows that our system provides an excellent efficiency in identifying anomalies in human walking. However some modifications could be done to improve the recognition accuracy. For instance, in some testing cases of the mocap dataset, a normal gait was detected as an anomaly when the corresponding walk trajectory was significantly curved (e.g., a performer changes his/her walking direction at a room corner). Such curved-trajectory cycles could have been ignored, since, in a clinical application, the patient would typically be required to walk in a linear walkway. In addition, some short-length cycles were wrongly detected as abnormal because of the effect of noise in localizing foot joints. A threshold value could be defined in order to eliminate or incorporate each such cycle into the next one. More robustness could be added to the proposed method by requiring a minimum number of abnormalities through a specified period of time to confirm the anomaly. Finally, our algorithm does not require the normal gait pattern of each subject since it knows the gait pattern of a normal population. Notice that the HMM could be trained with a larger normal dataset to further improve its performance in the future.
As future work, some other skeleton-based characteristics will be assessed (e.g., upper body). Principal component analysis, linear discriminant analysis or other machine learning algorithms could be employed in order to select better features. Our proposed methodology will also be improved to create specific models of different pathological gaits, such as choreiform, hemiplegic, diplegic, and Parkinsonian [
23]. In addition, other classification techniques, e.g., regression [
24], will be investigated for comparison to choose the most appropriate model for each gait-related problem.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}