
3D Tracking via Shoe Sensing


Abstract
:1. Introduction
- We propose a solution using 3D shoe sensors, inertial sensor attached to the user’s shoes that can accurately localize the user in 3D indoor environments.
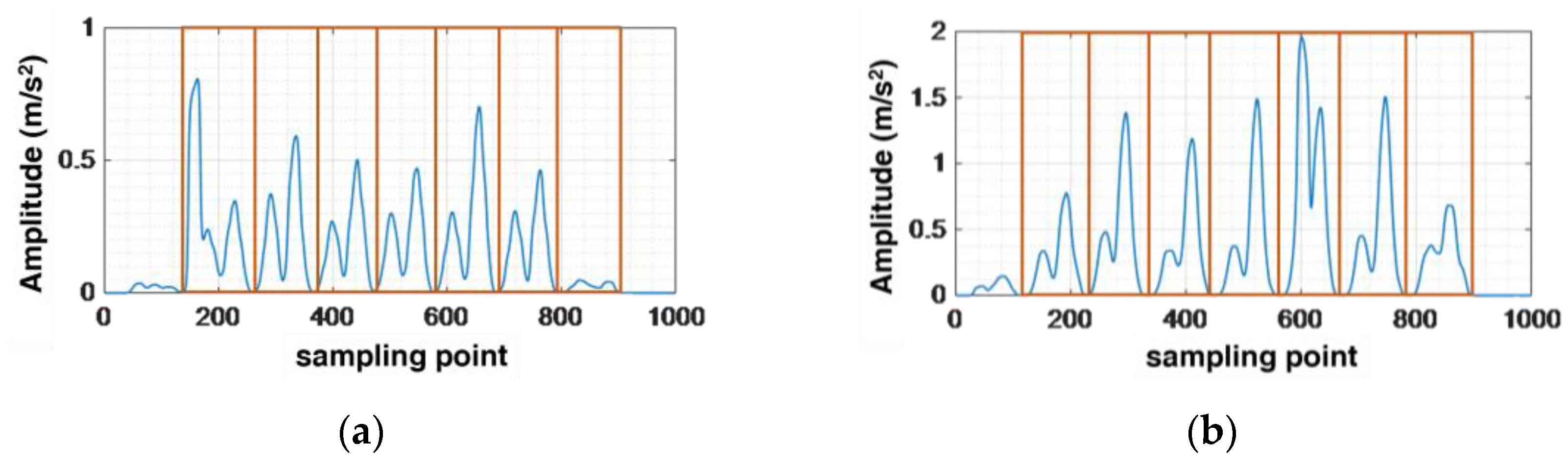
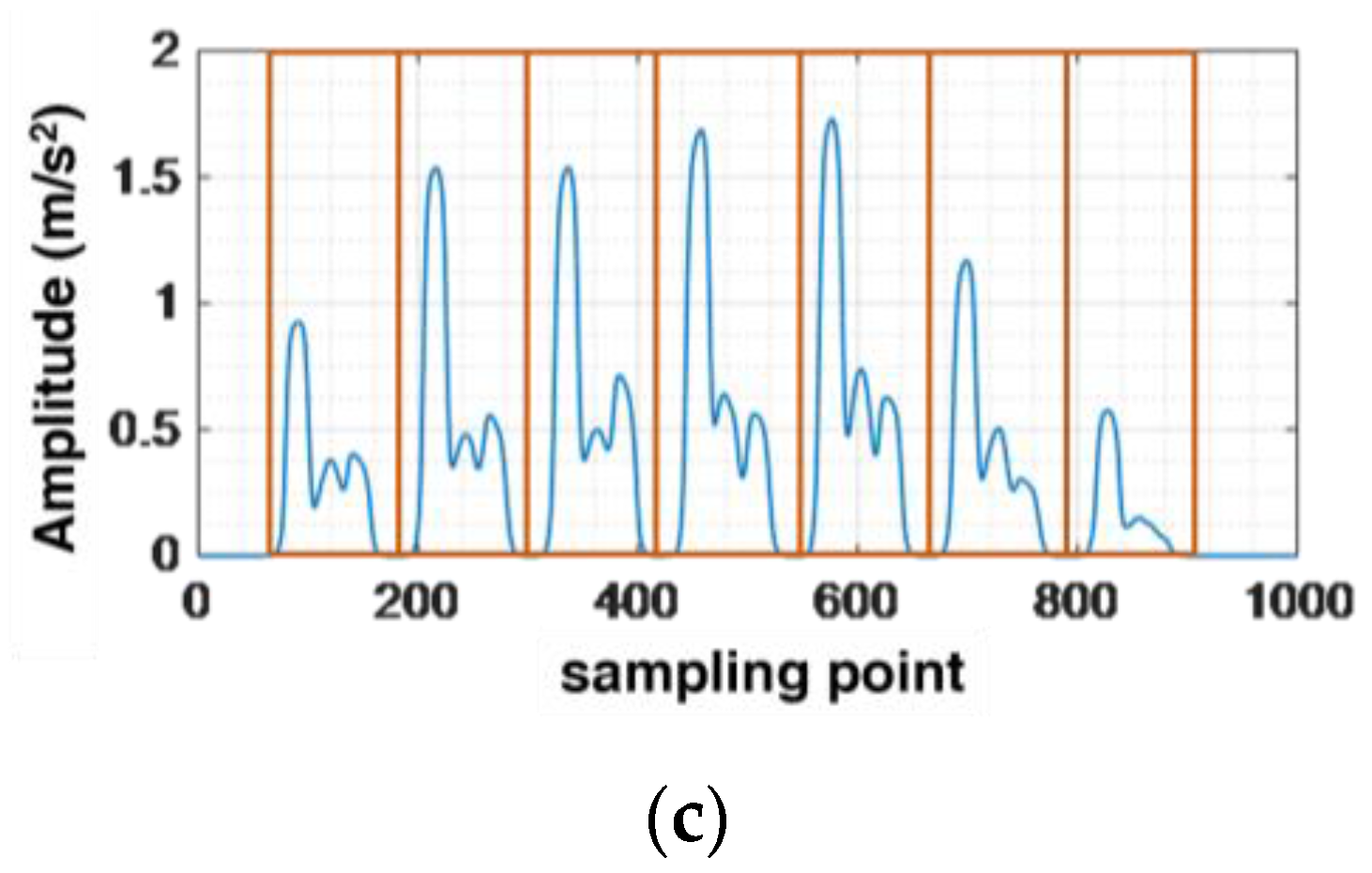
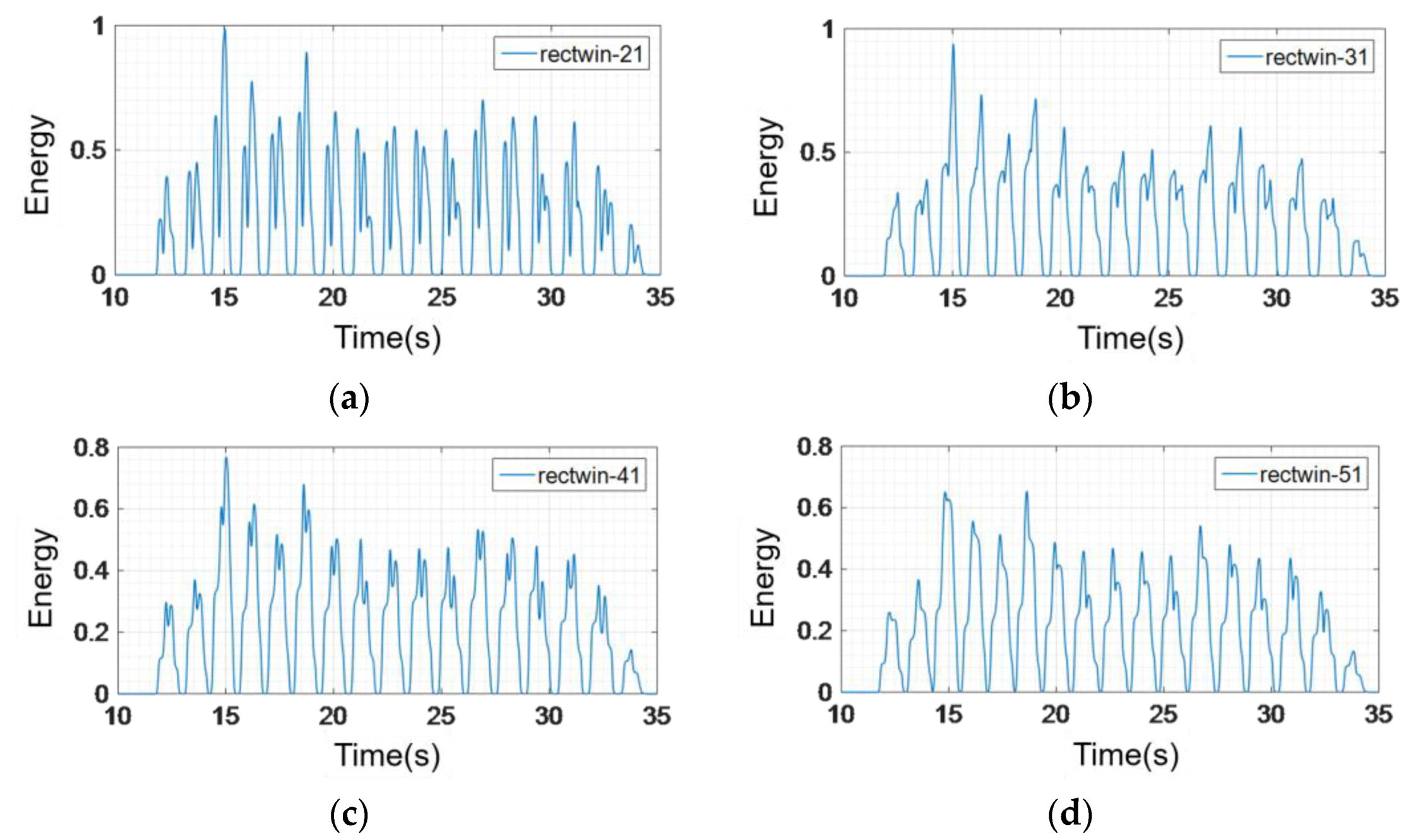
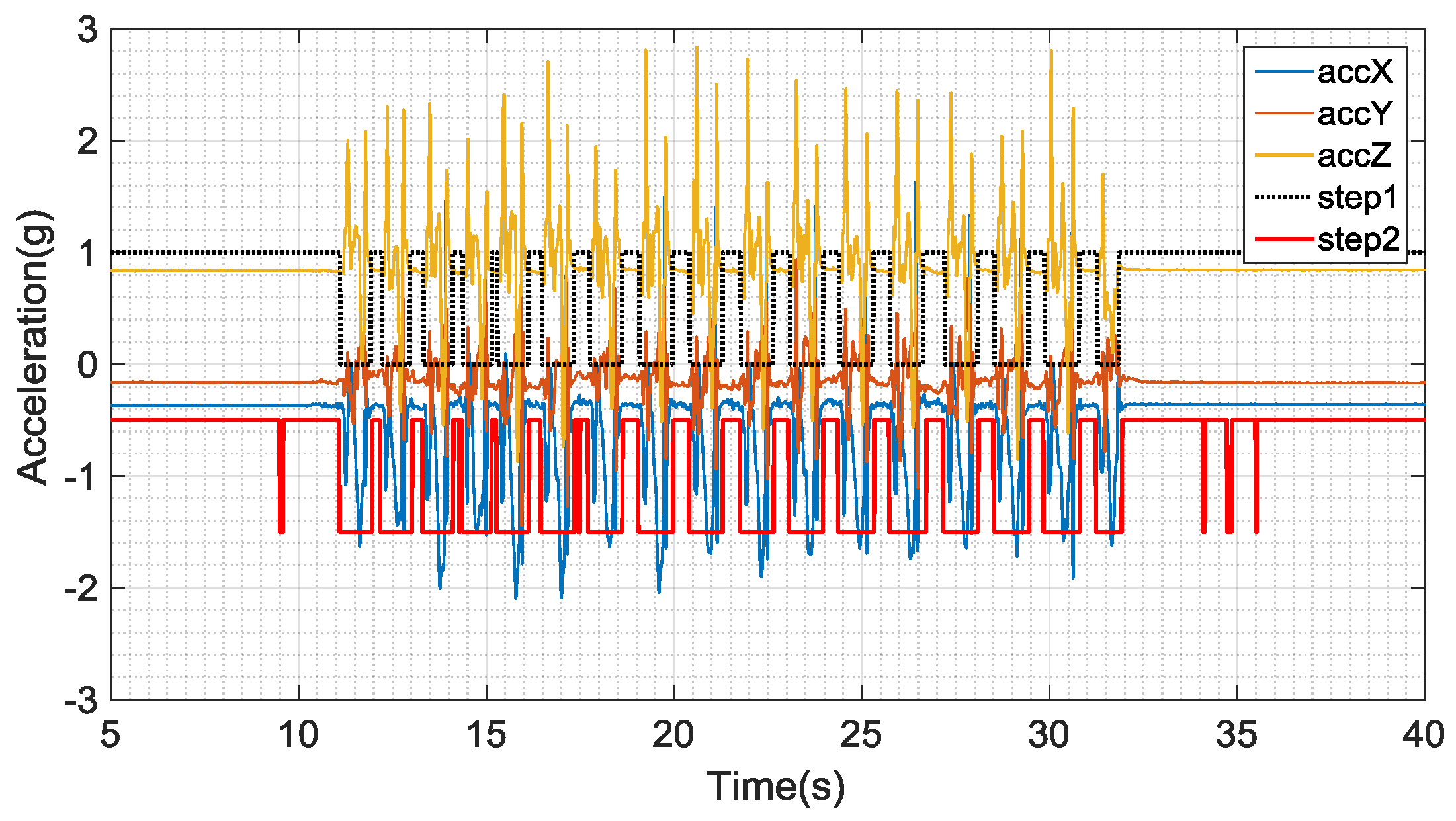
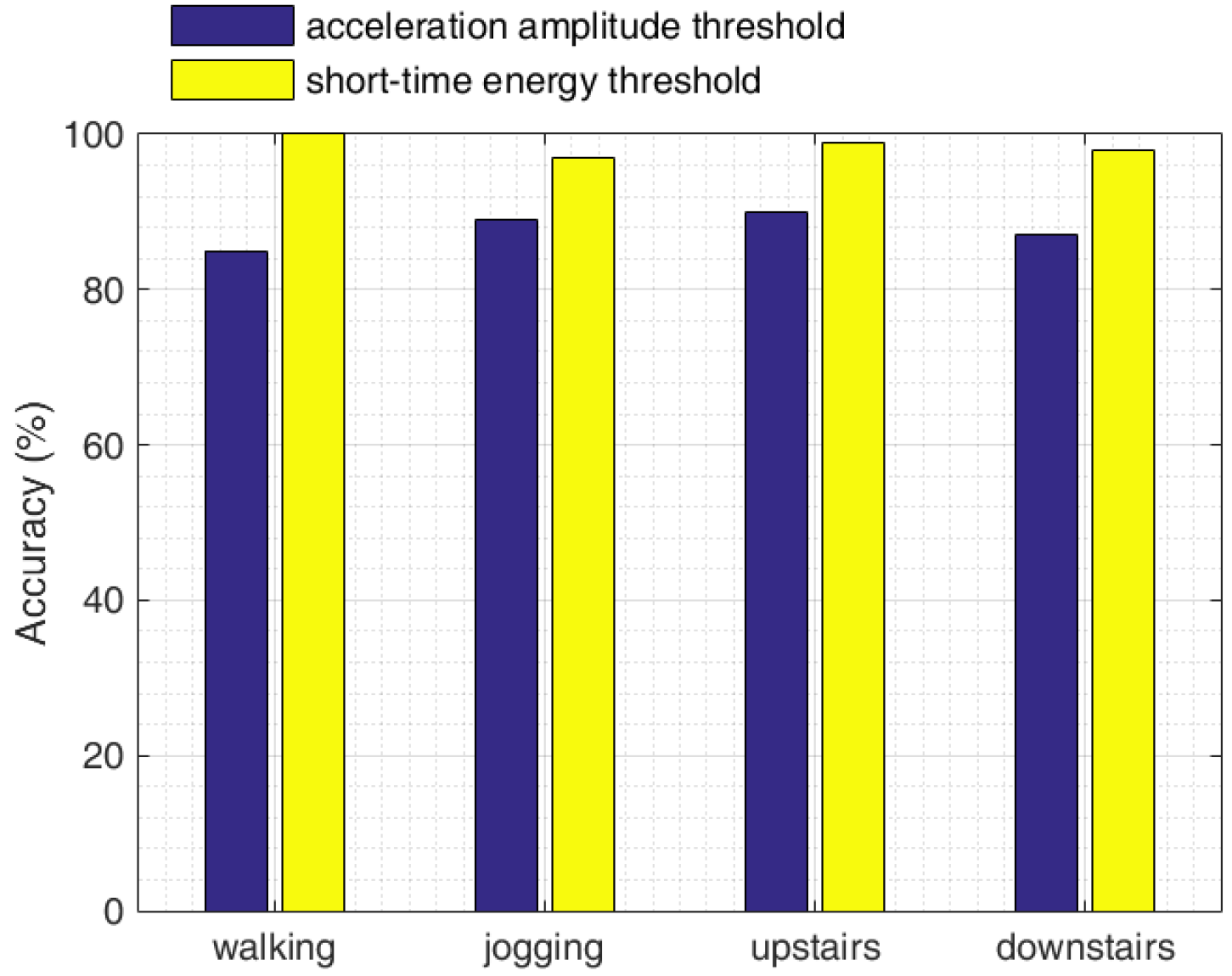
- A short-time energy-based mechanism has been proposed to extract gait information while the user is walking.
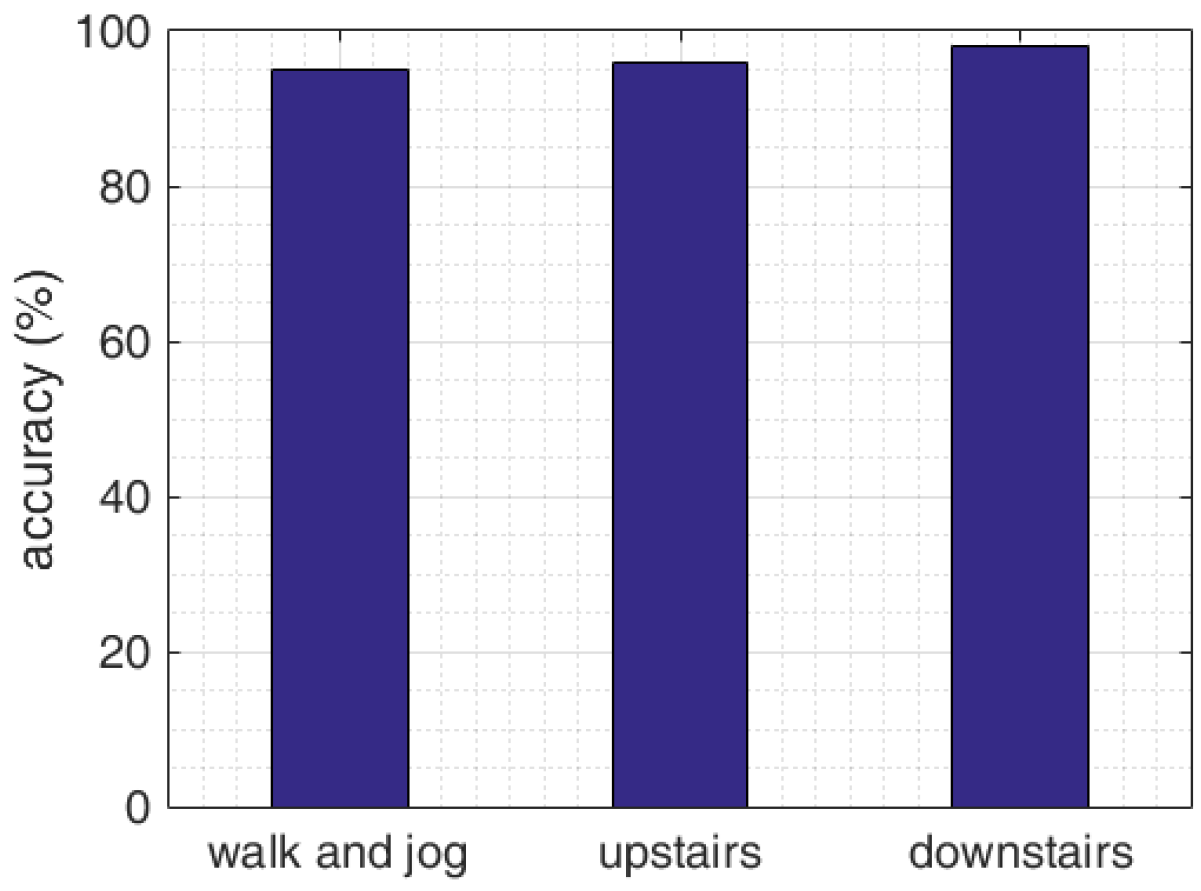
- We design a walking state classification model that can distinguish the user’s walking status including normal walking, going upstairs, and going downstairs. The classified walking status can be further used to reduce 3D positioning errors.
- Extensive experiments demonstrate that the proposed low-cost shoe sensing-based 3D indoor positioning solution can perform real-time localization with high accuracy.
2. Related Work
3. Methodology
3.1. Gait Information
3.1.1. Fixed Position Selection
3.1.2. Gait Information Extraction
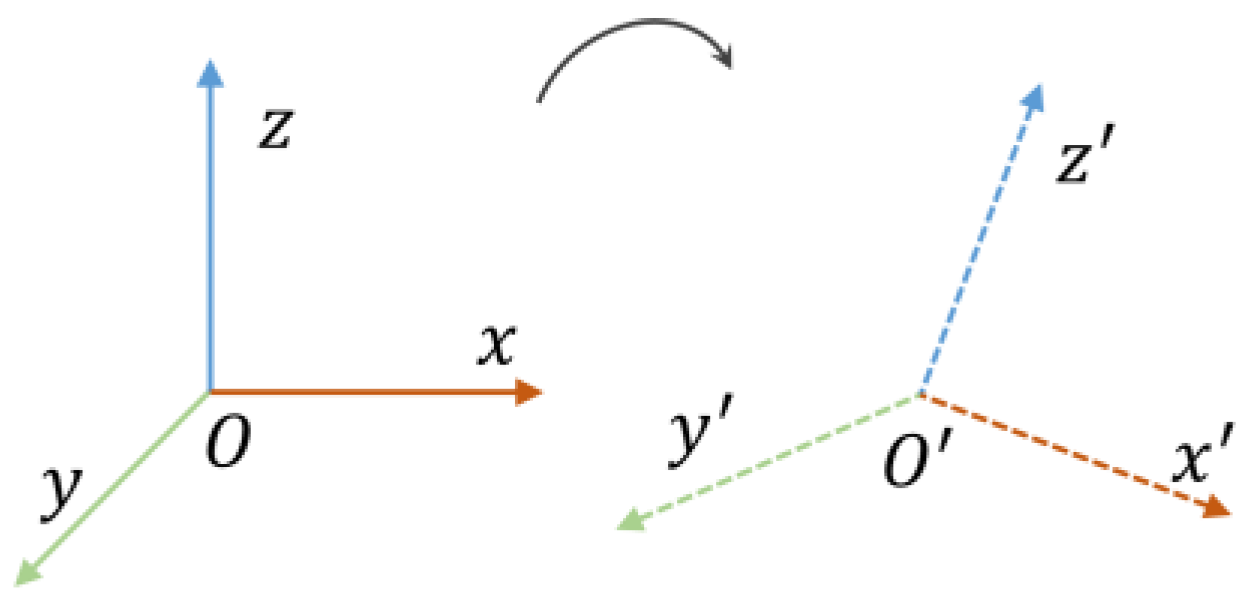
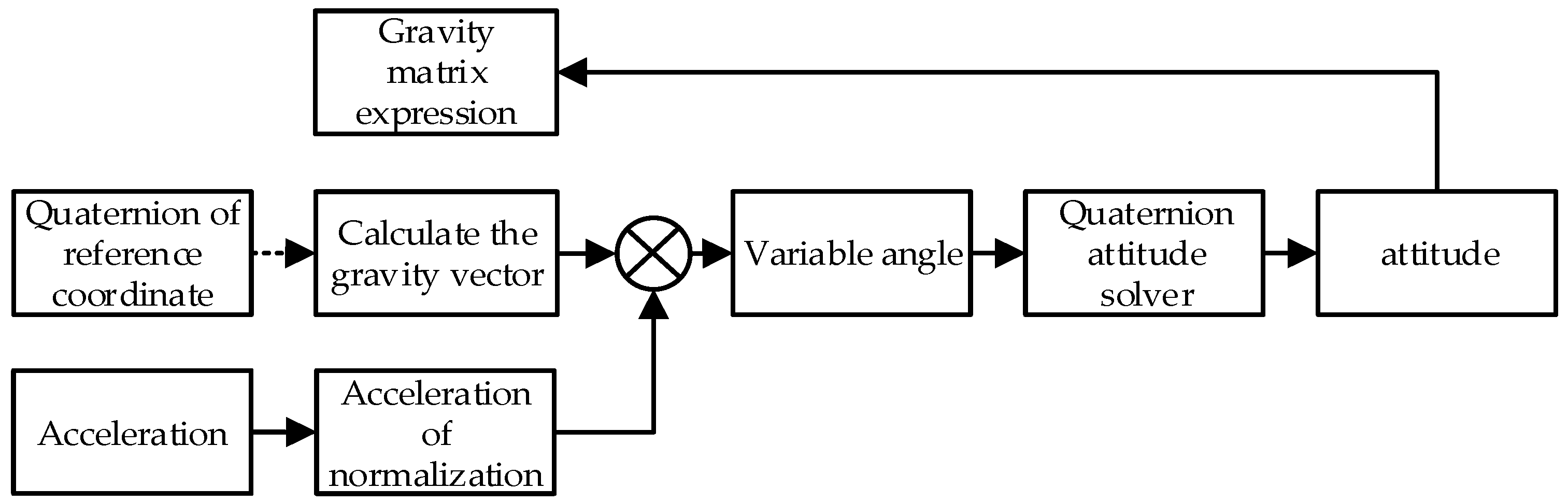
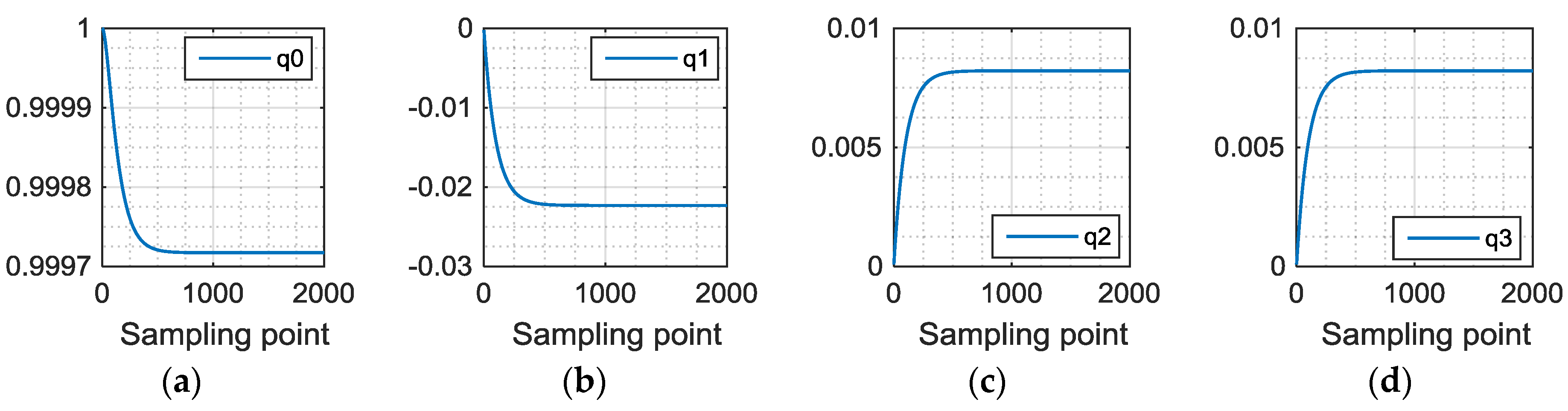
3.2. Posture Correction Based on Gait Information
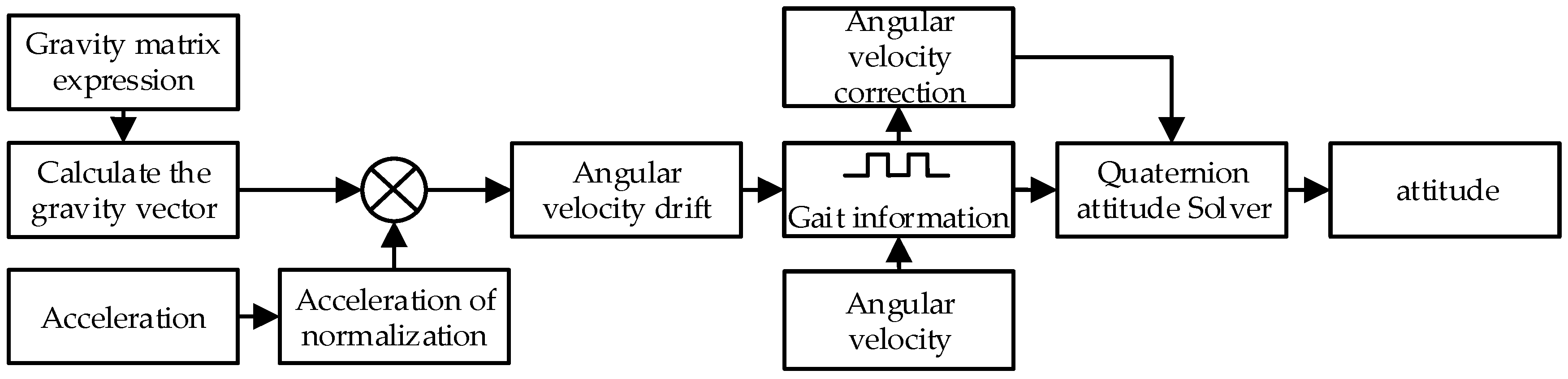
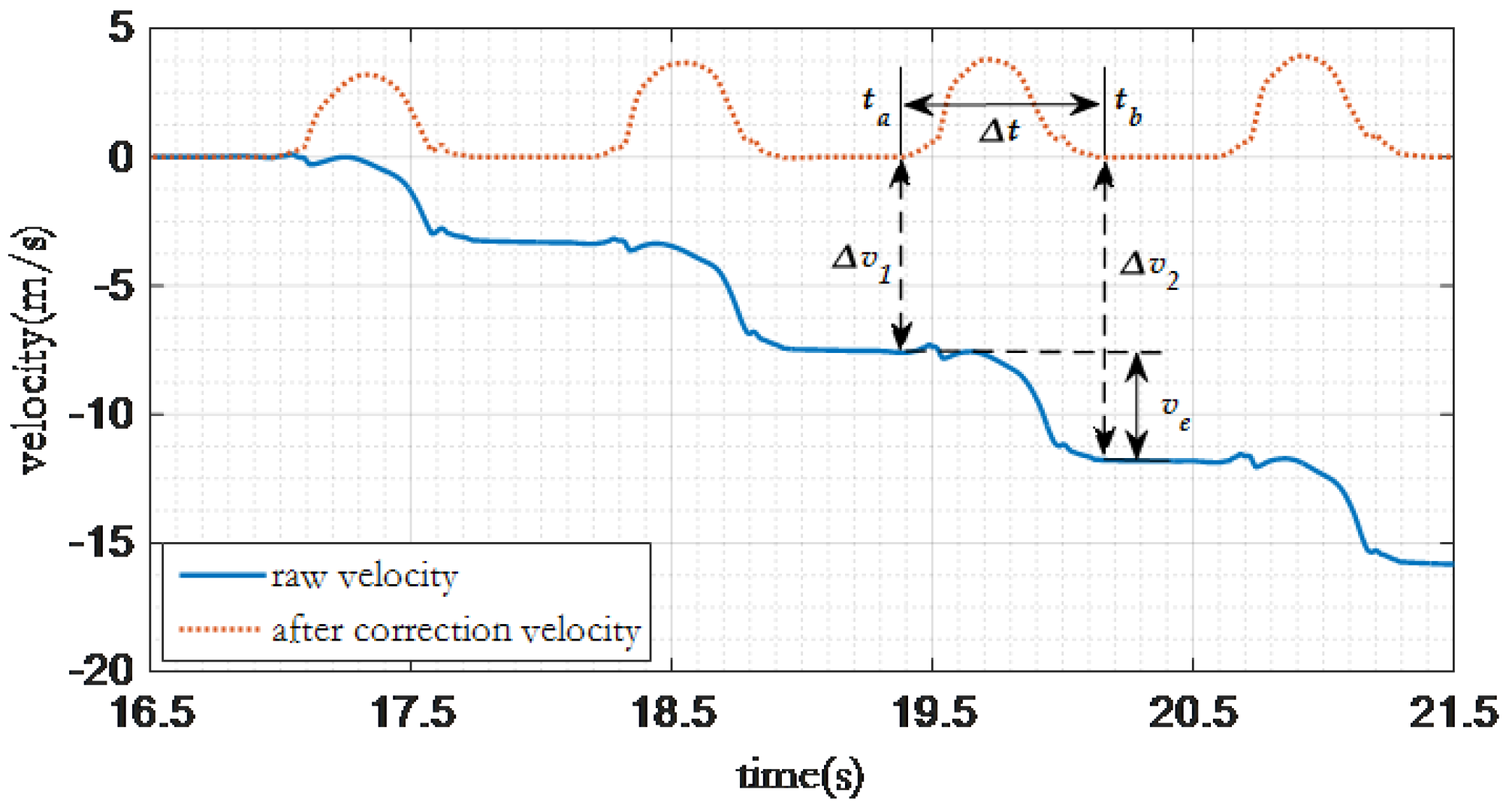
3.3. Eliminate Cumulative Error Based on Gait Information
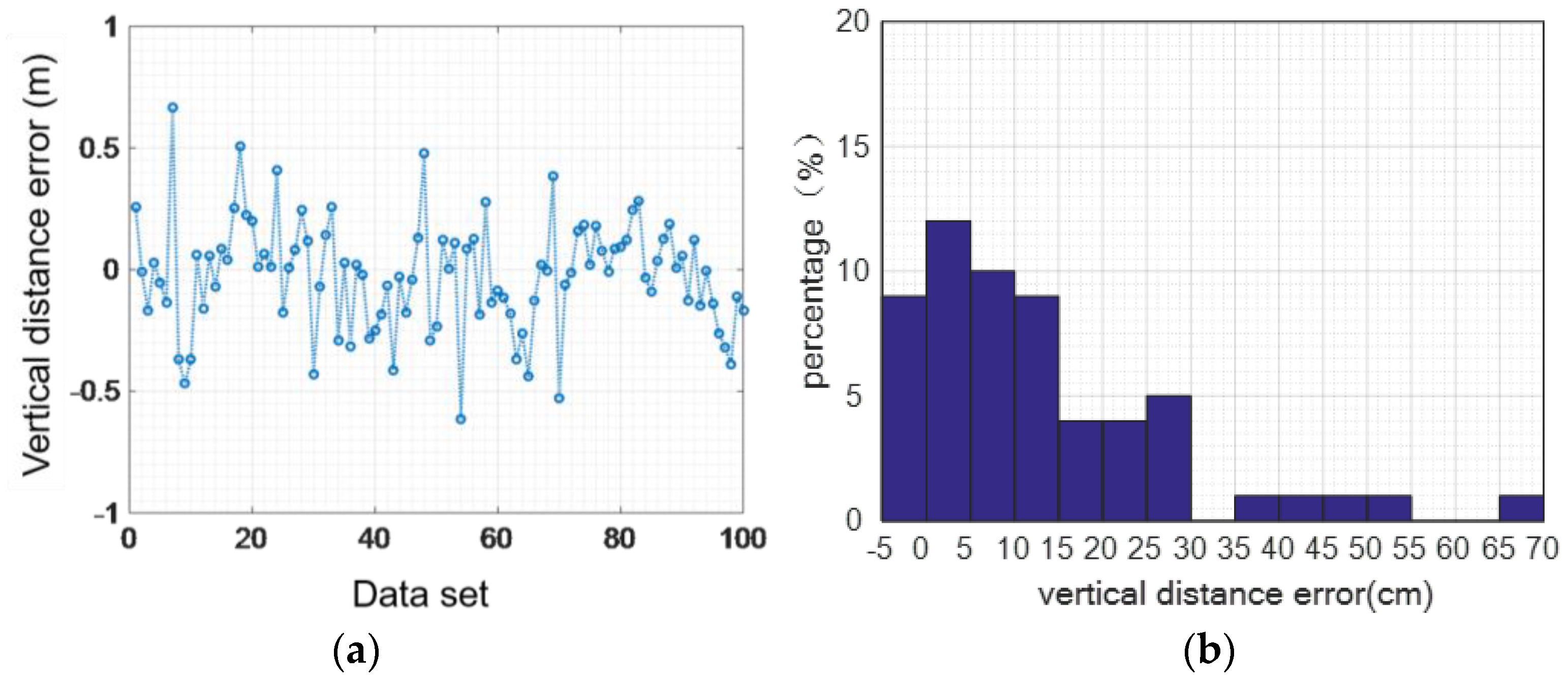
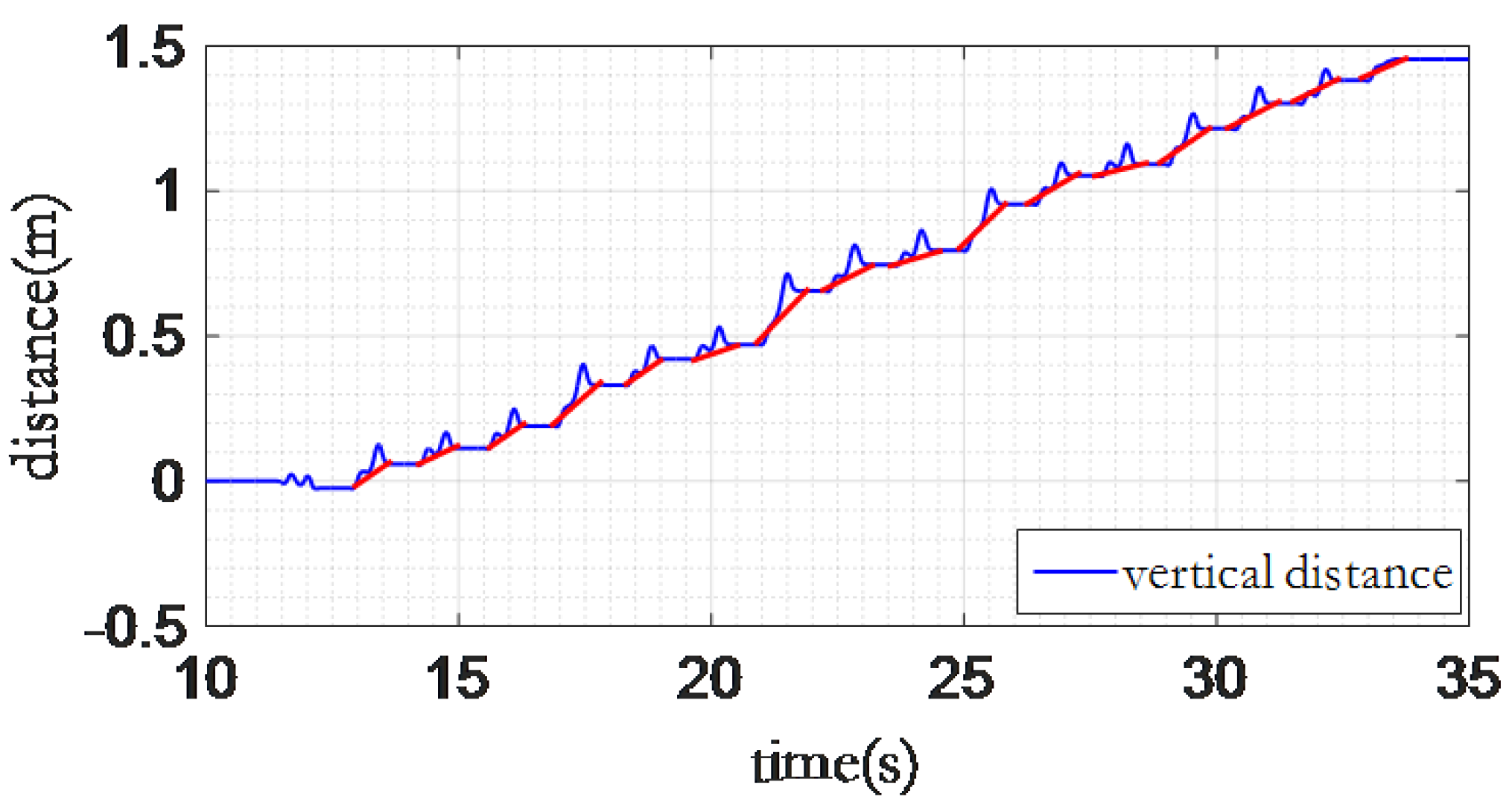
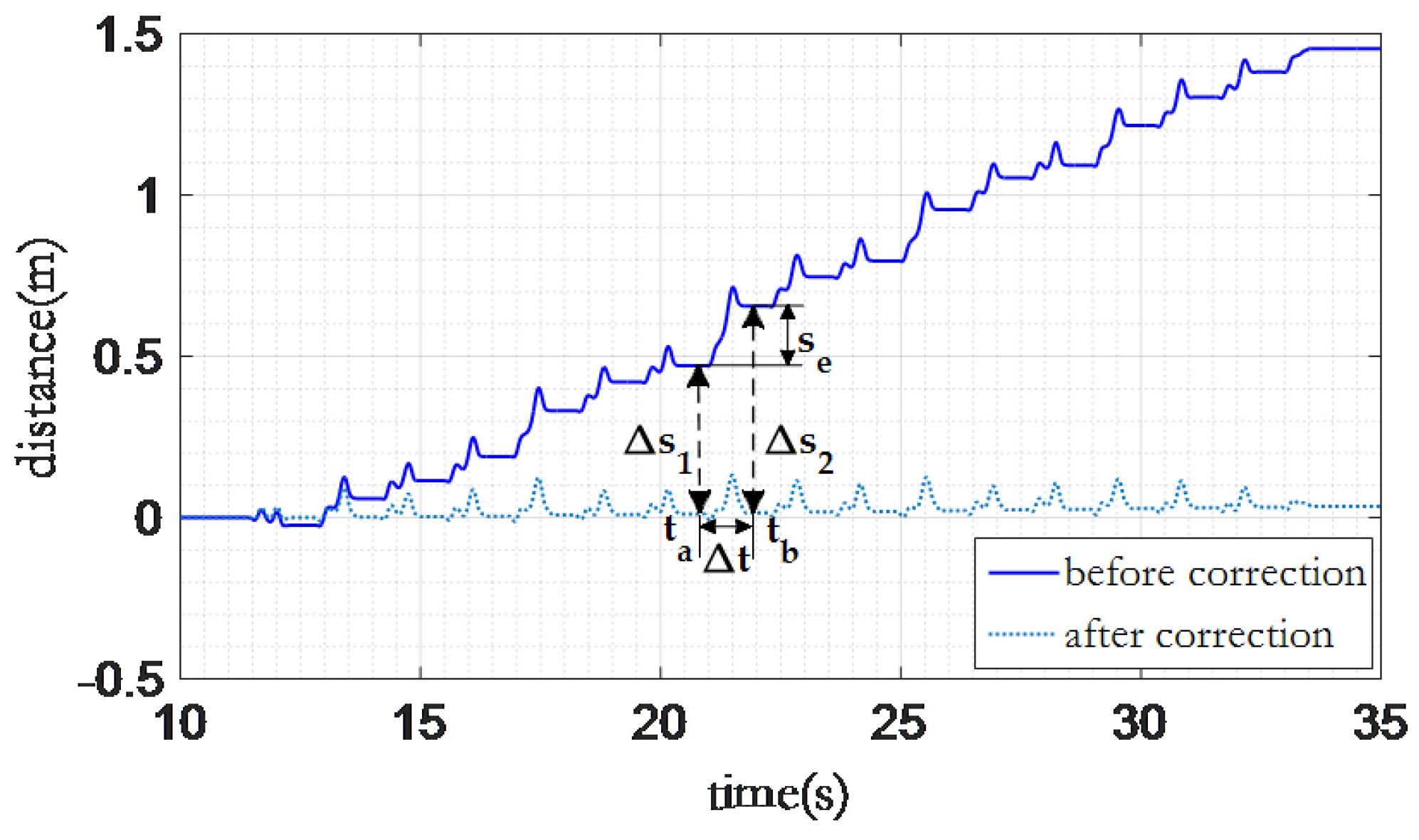
3.4. Eliminate Vertical Distance Error Based on Gait Information
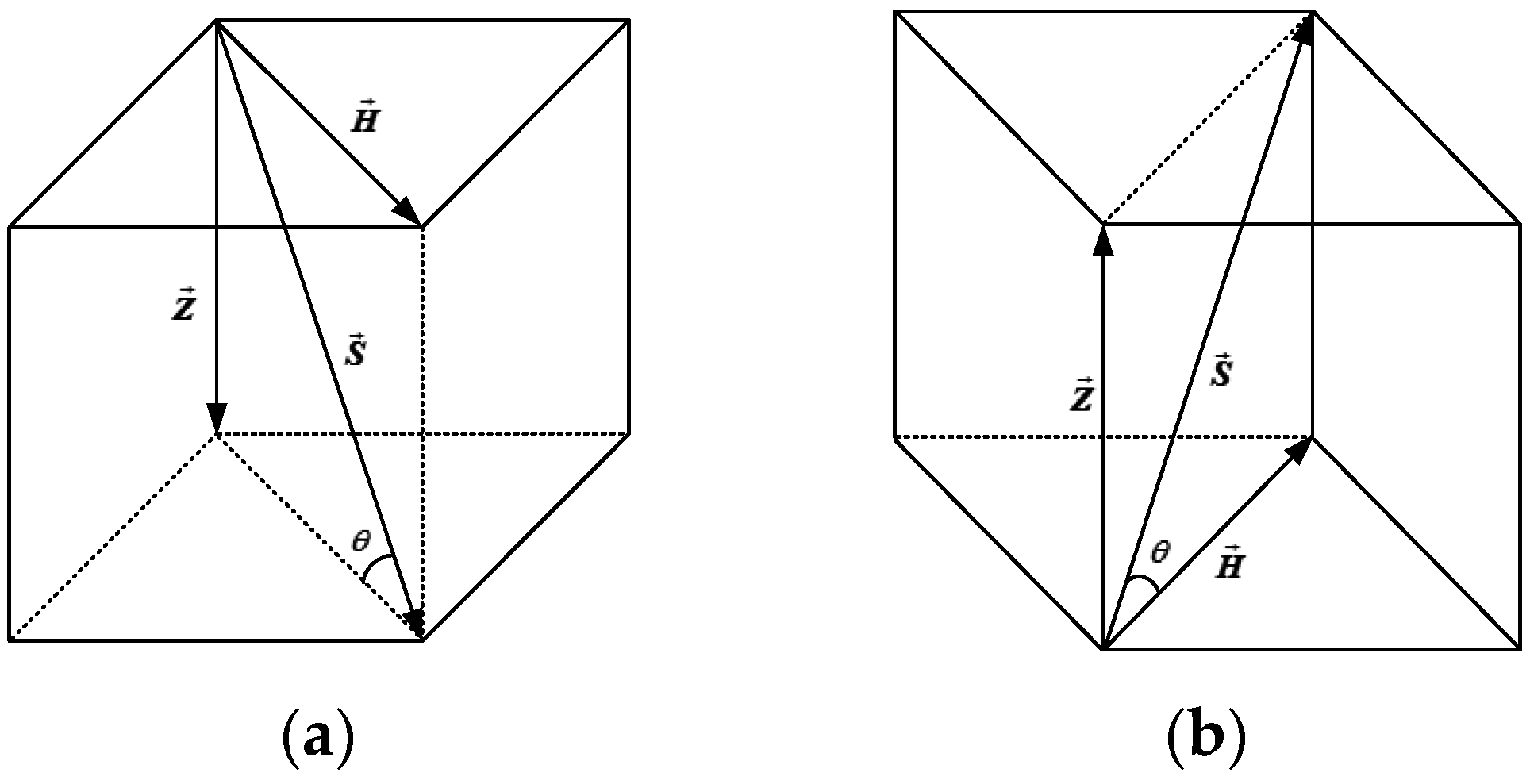
3.4.1. Build and Design a Model of State
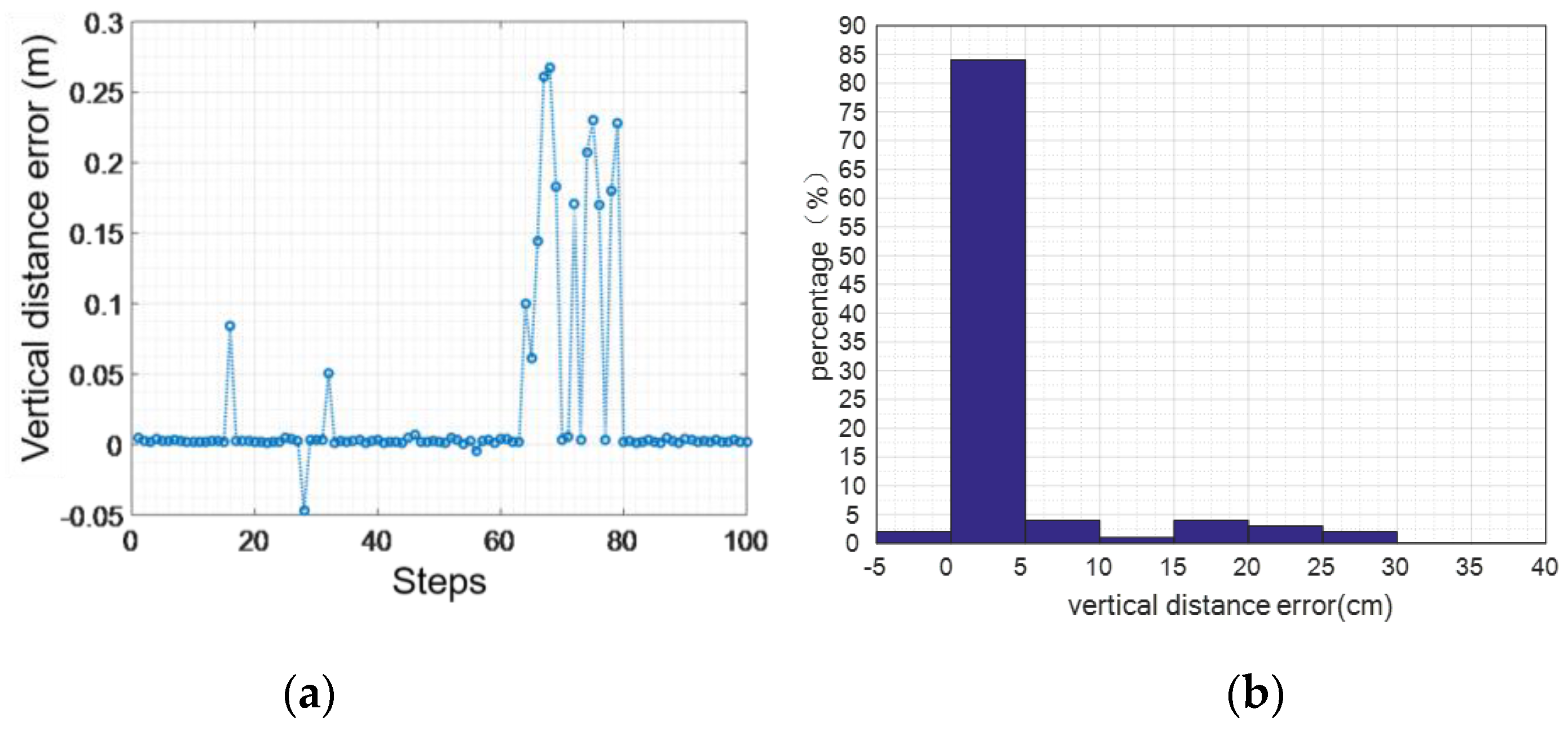
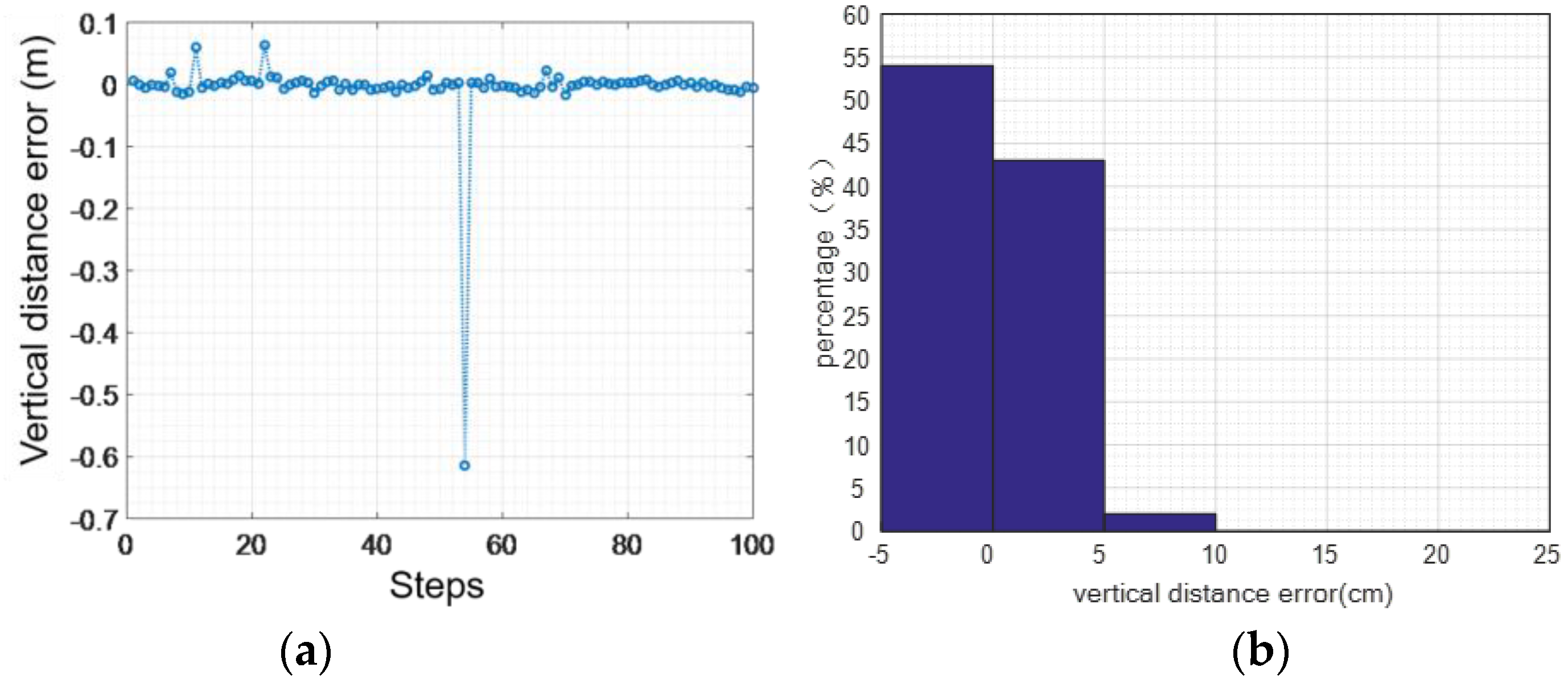
3.4.2. Eliminate Vertical Distance Error
4. Evaluation
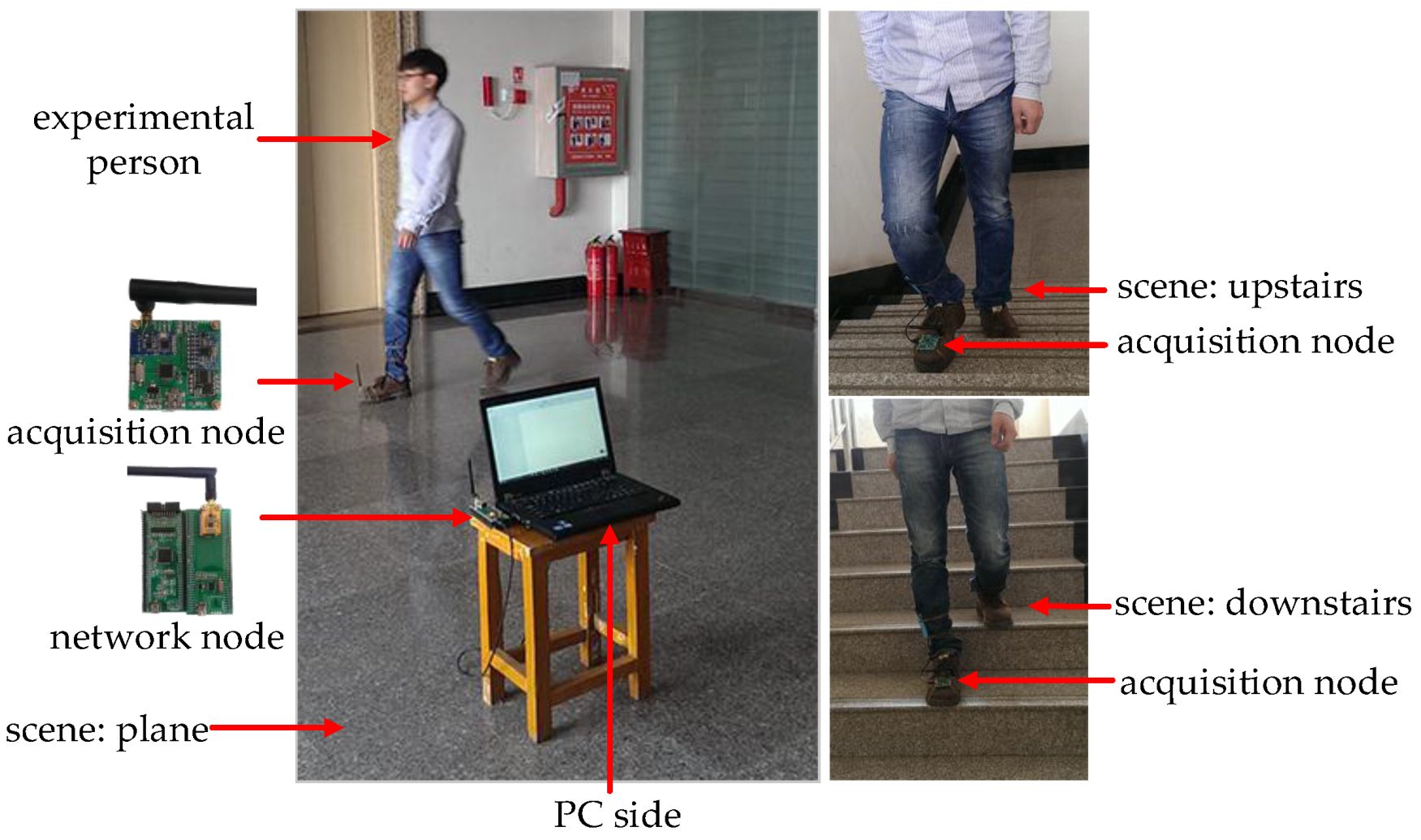
4.1. Building a System Platform and Experimental Settings
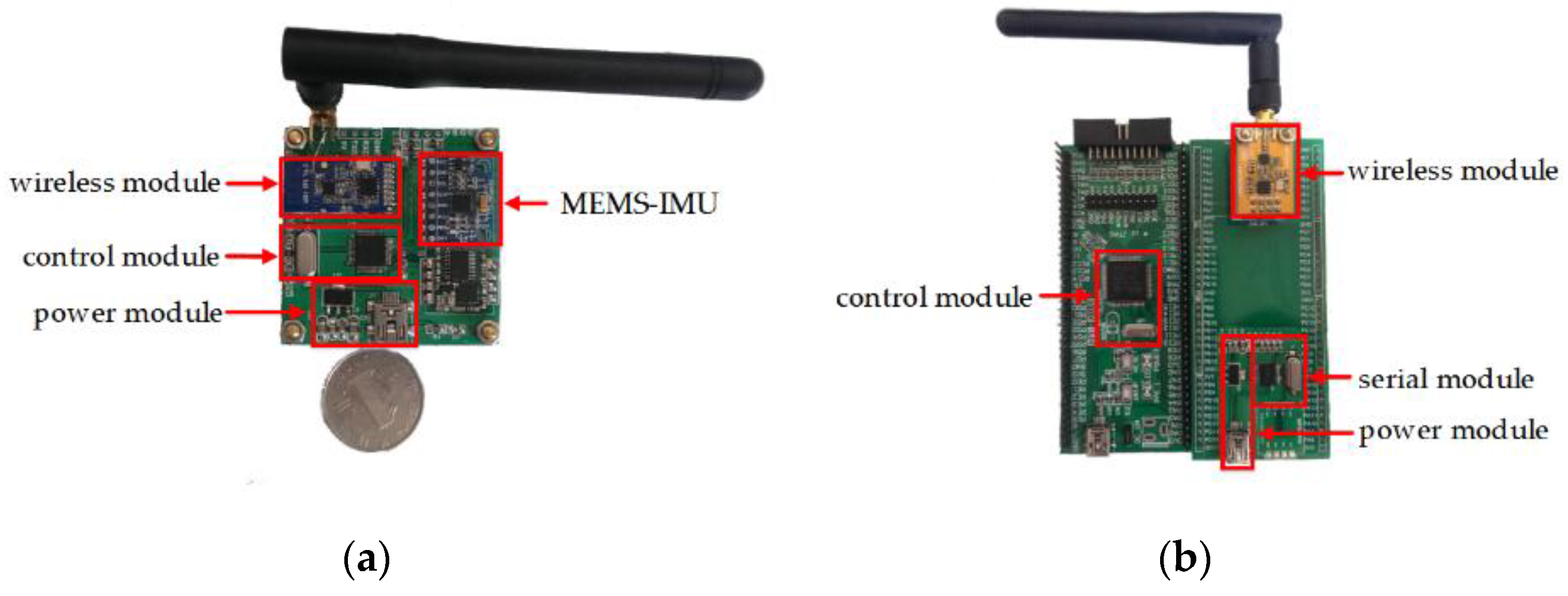
4.1.1. Building a System Platform
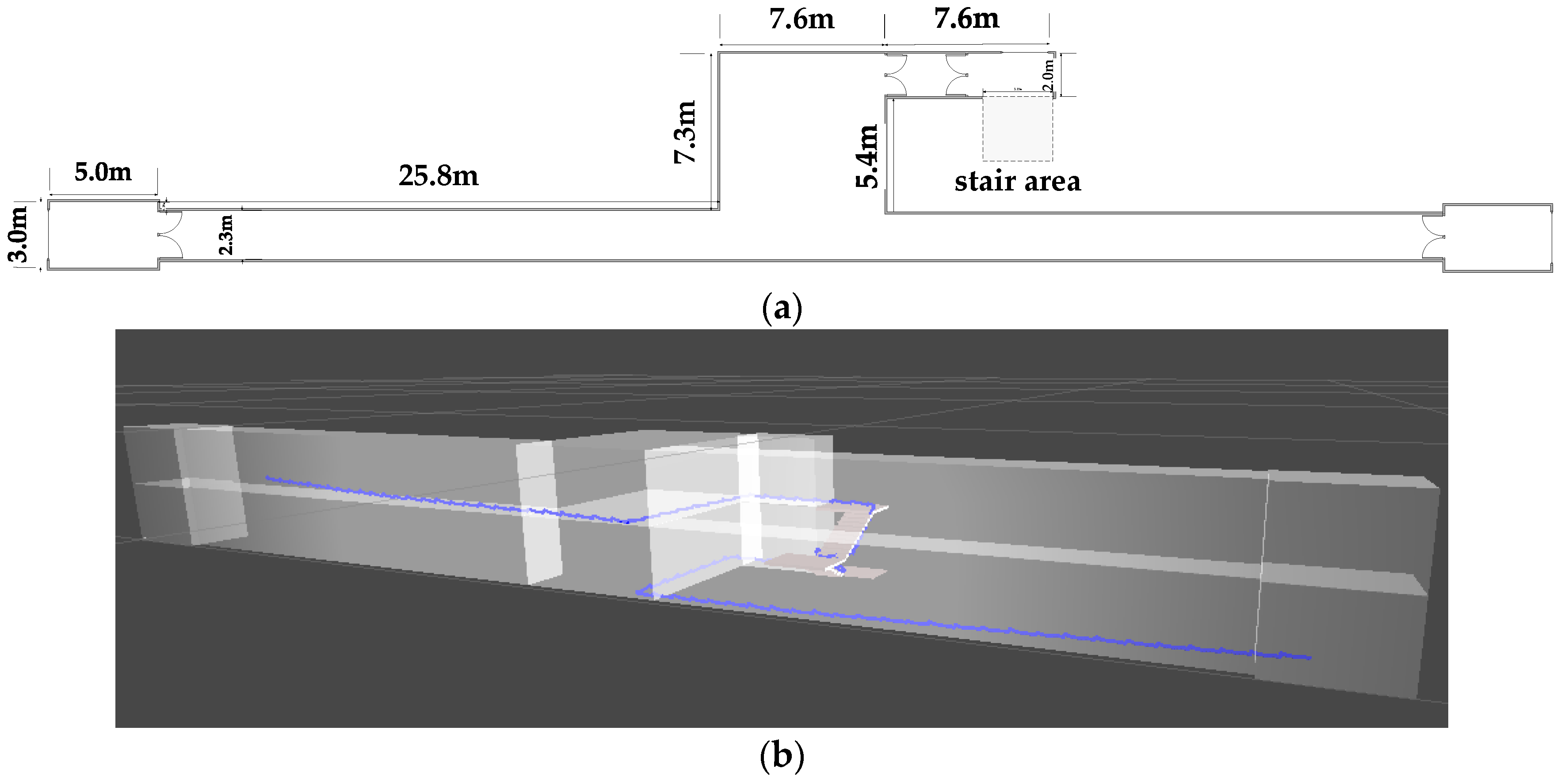
4.1.2. Experimental Environment Settings
4.2. Experimental Results and Analysis
4.2.1. Gait Information Extraction Experiments
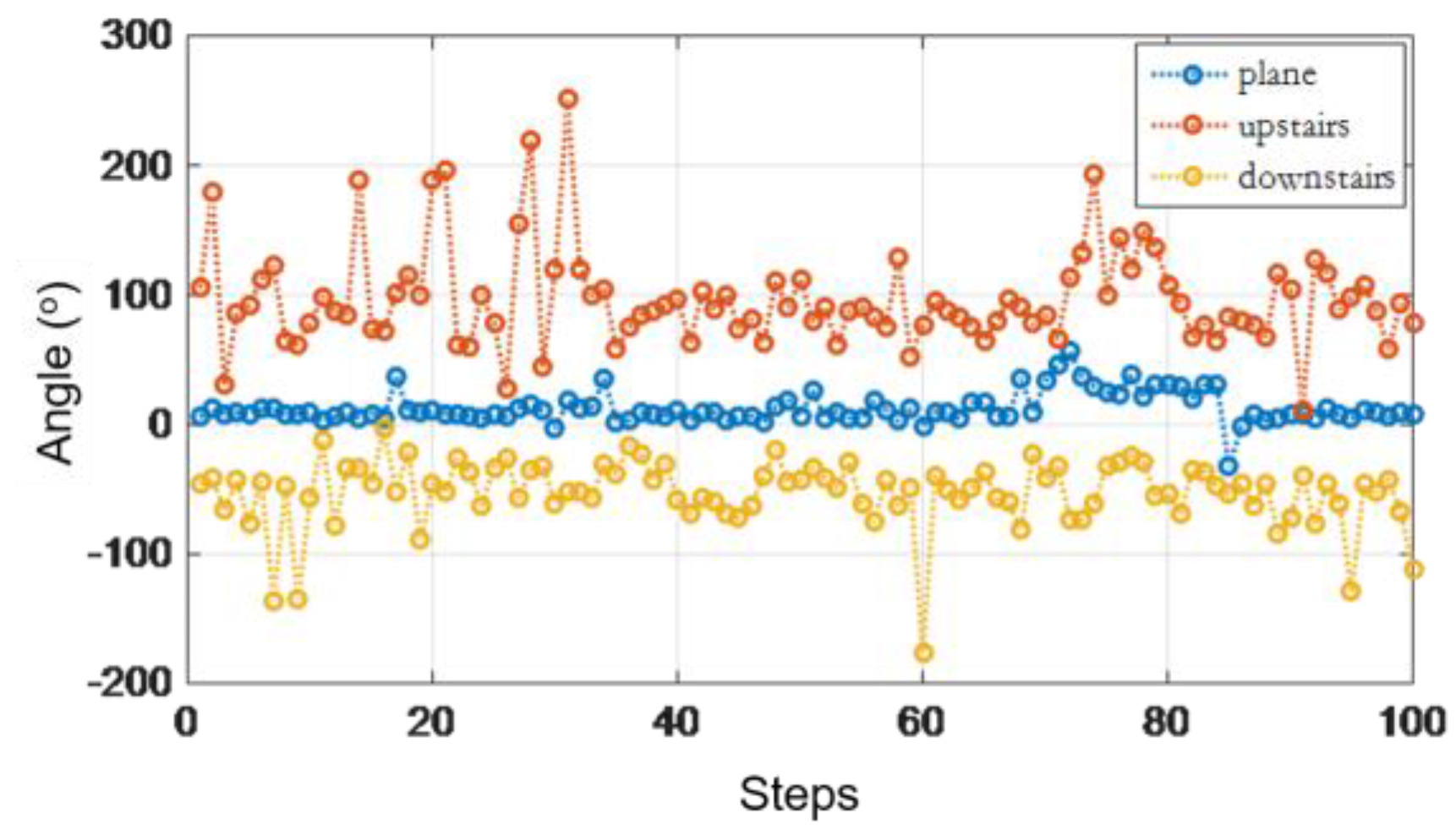
4.2.2. Walking State Classification Model Experiment
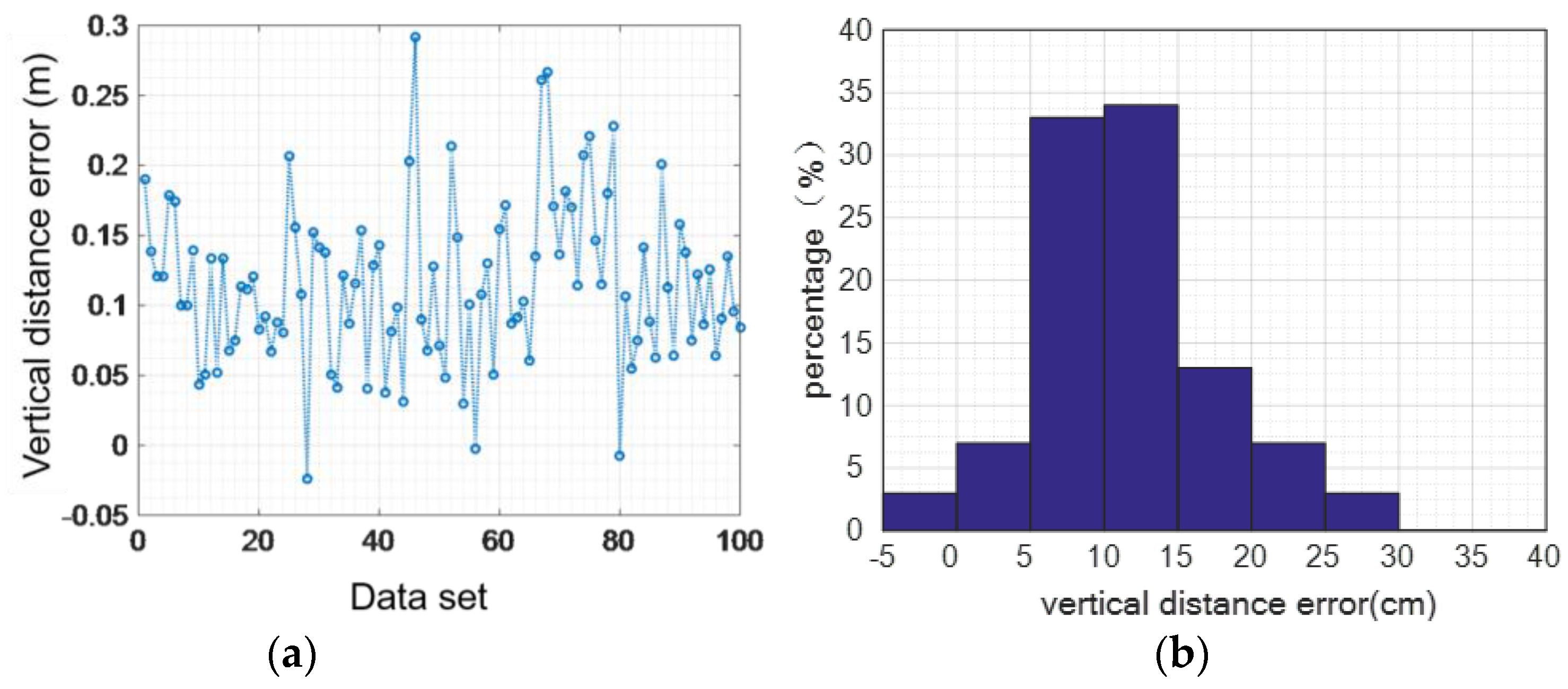
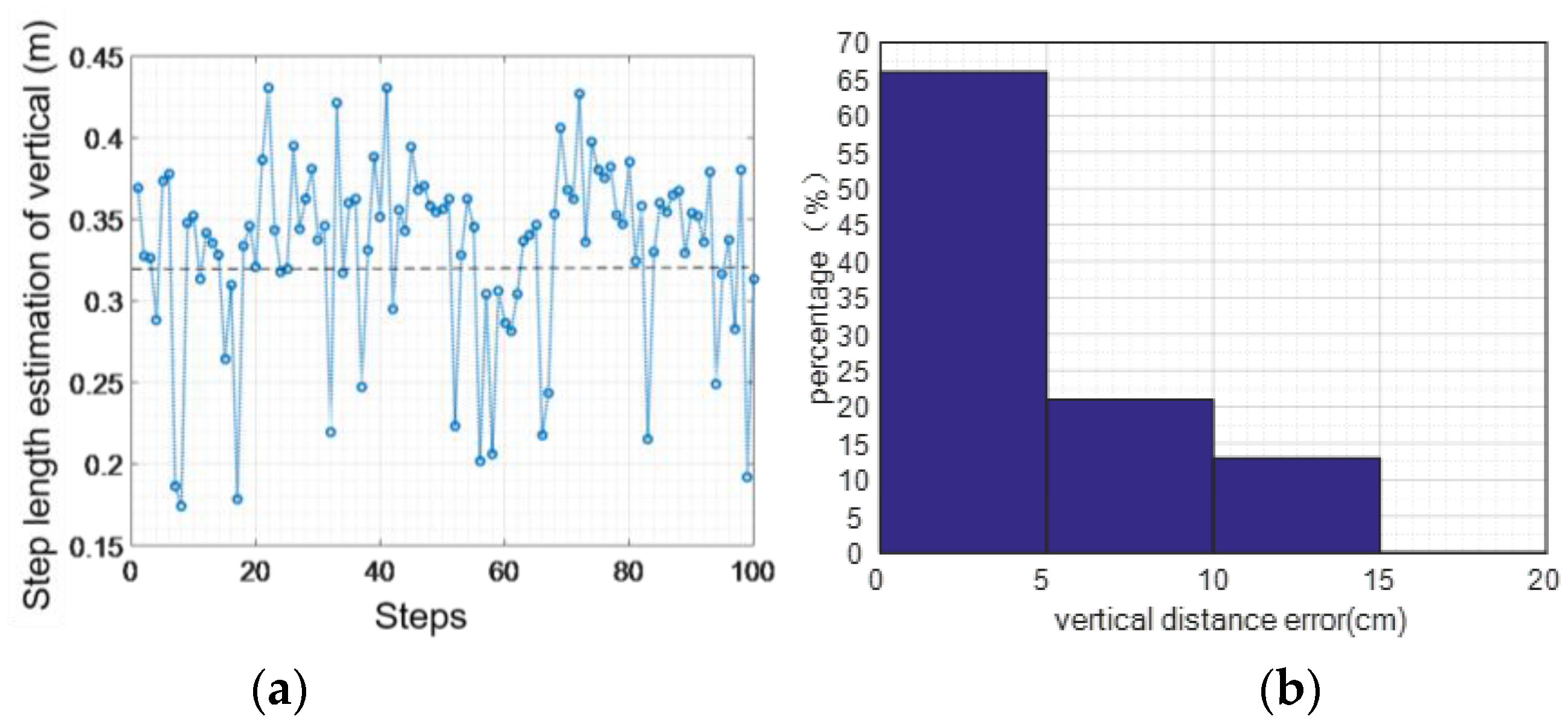
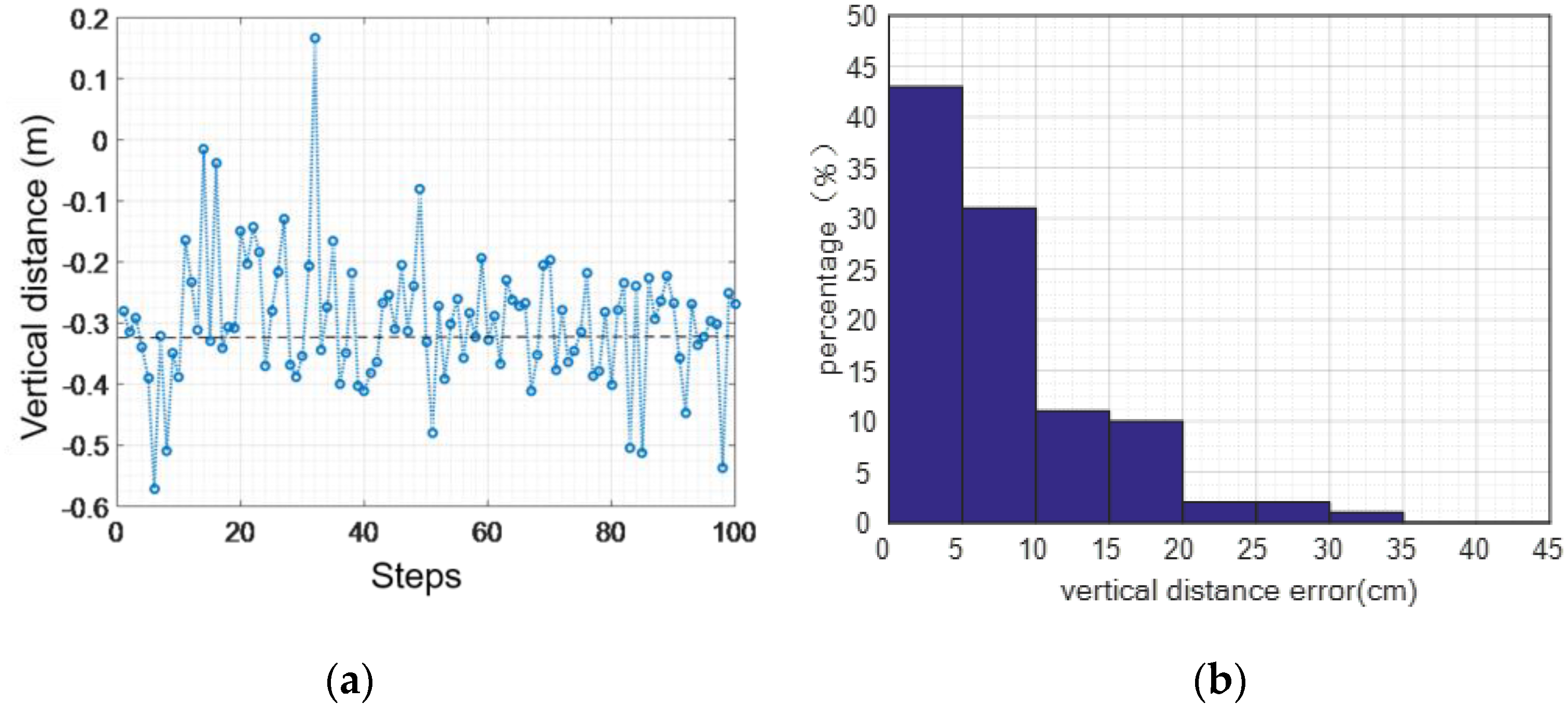
4.2.3. Error Elimination in the Vertical Direction
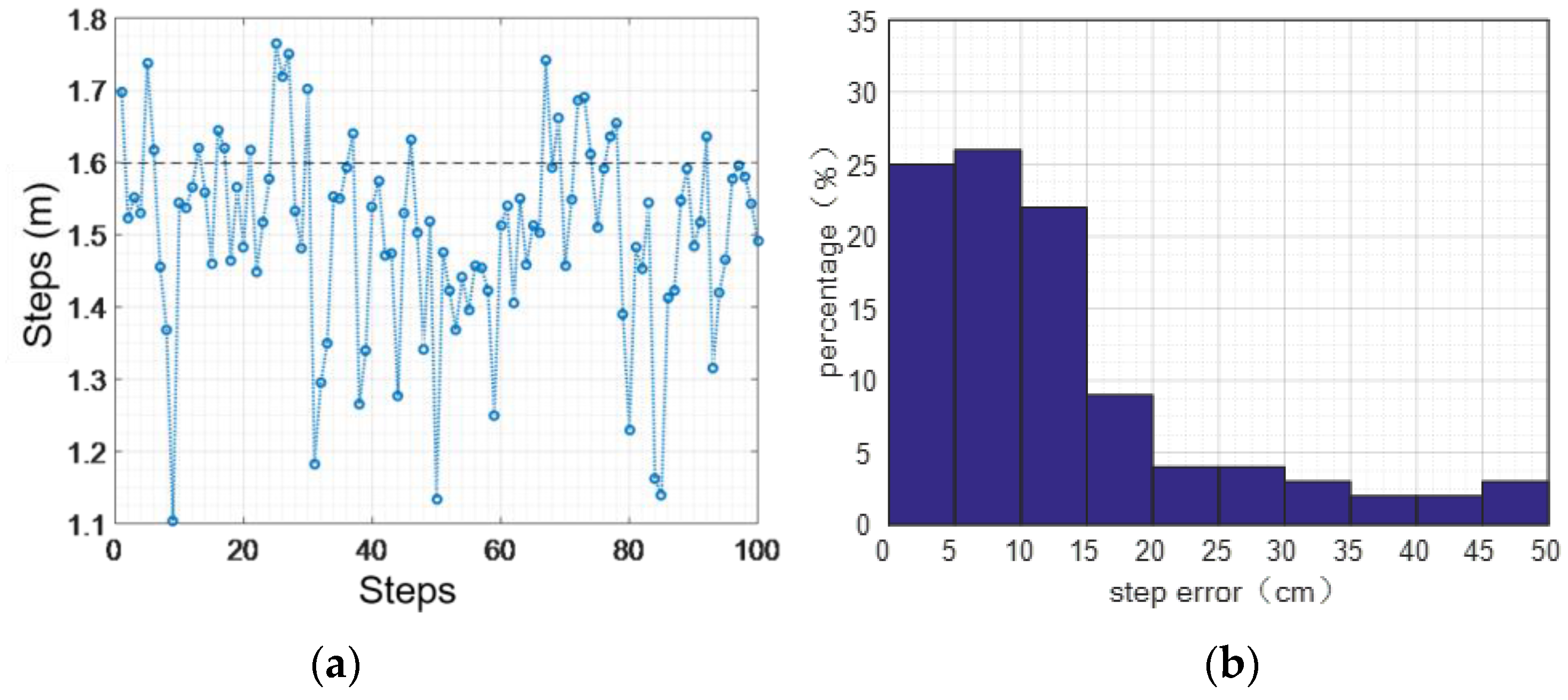
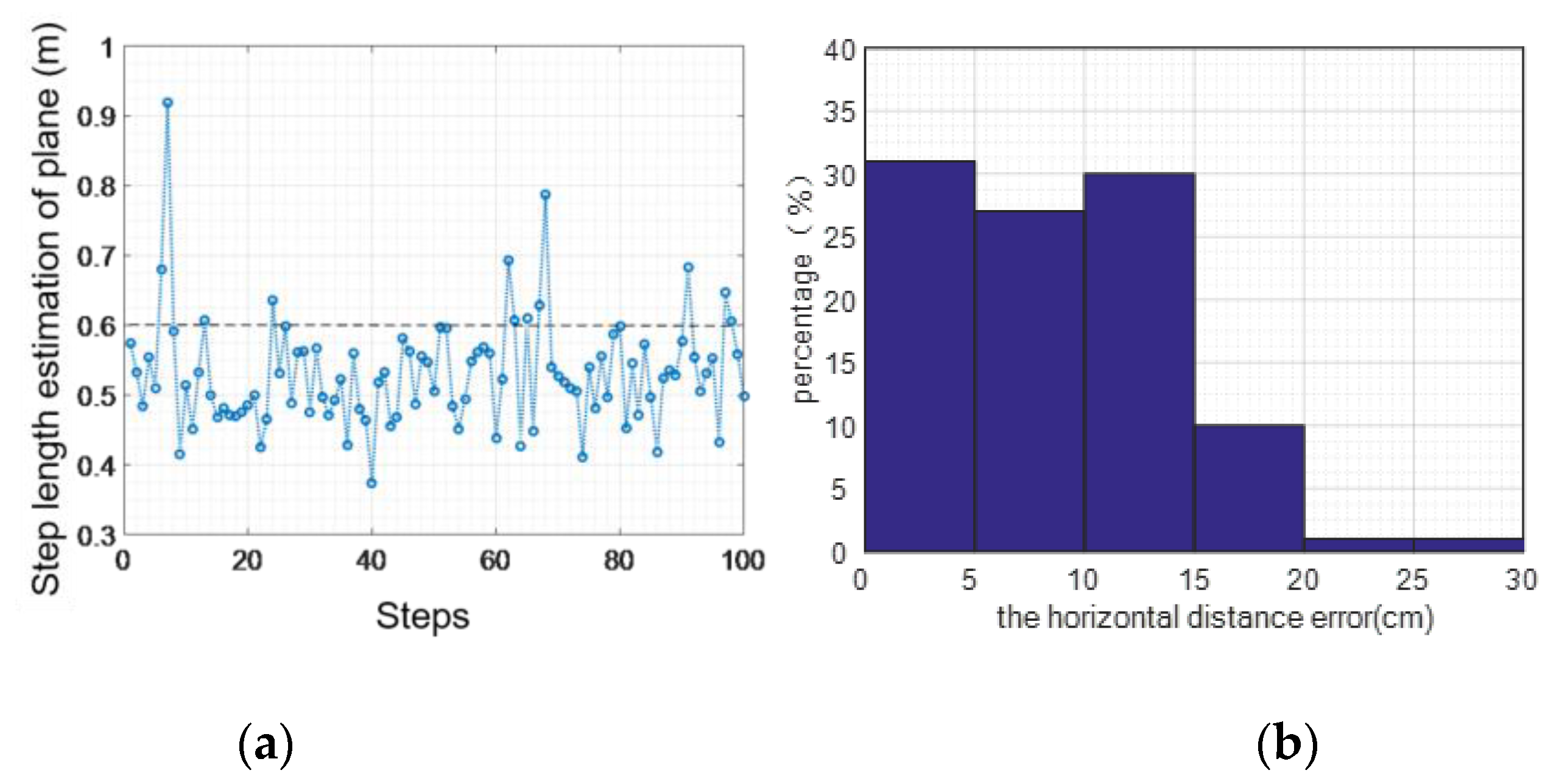
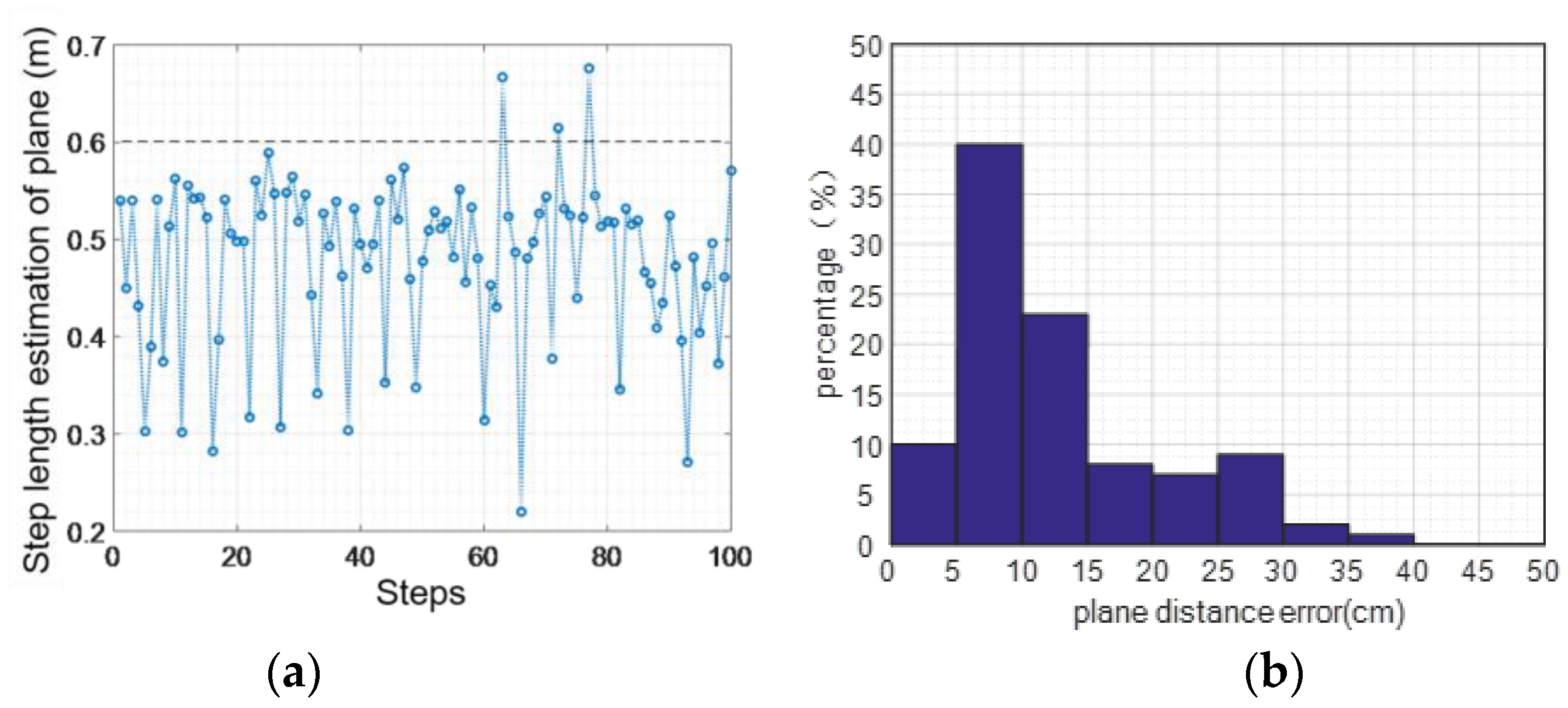
4.2.4. Experimental Estimation Step
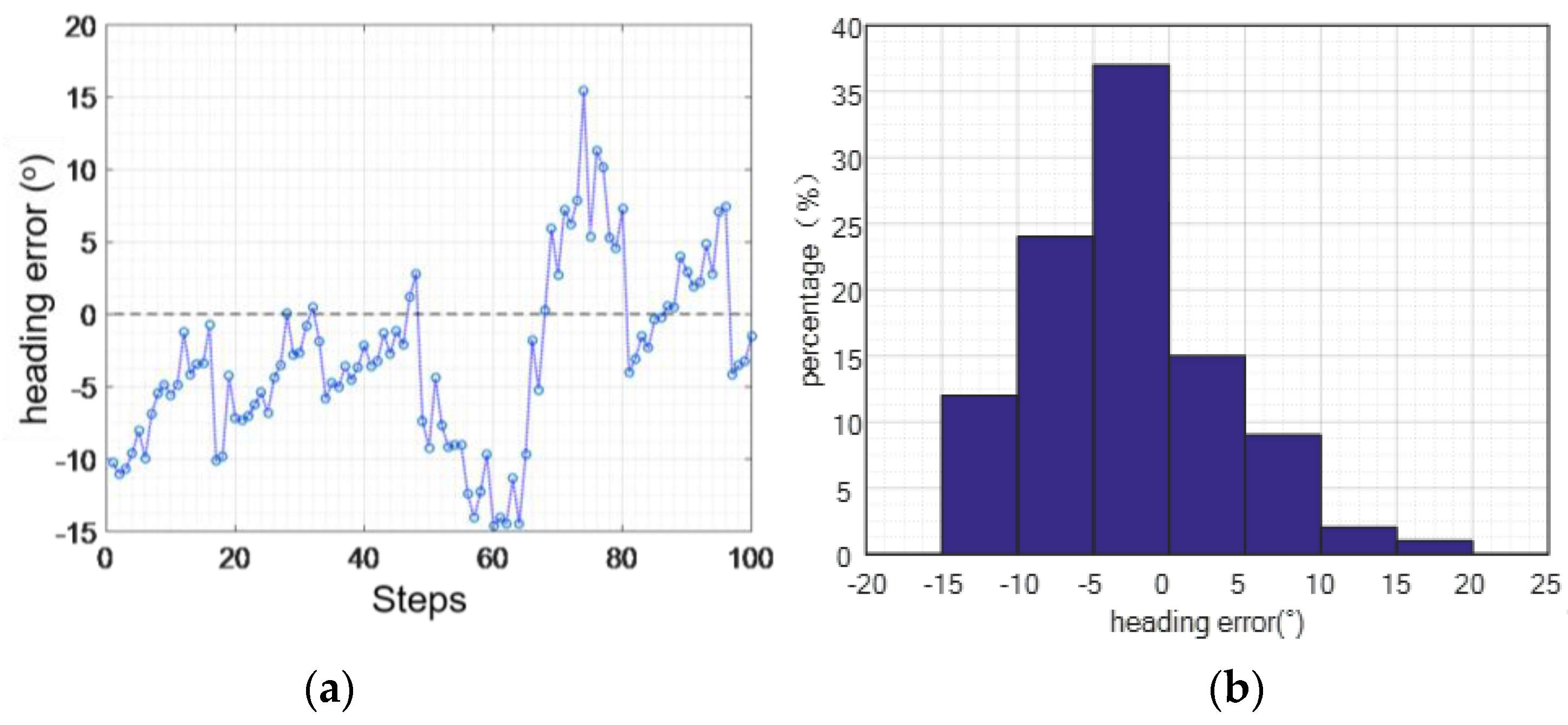
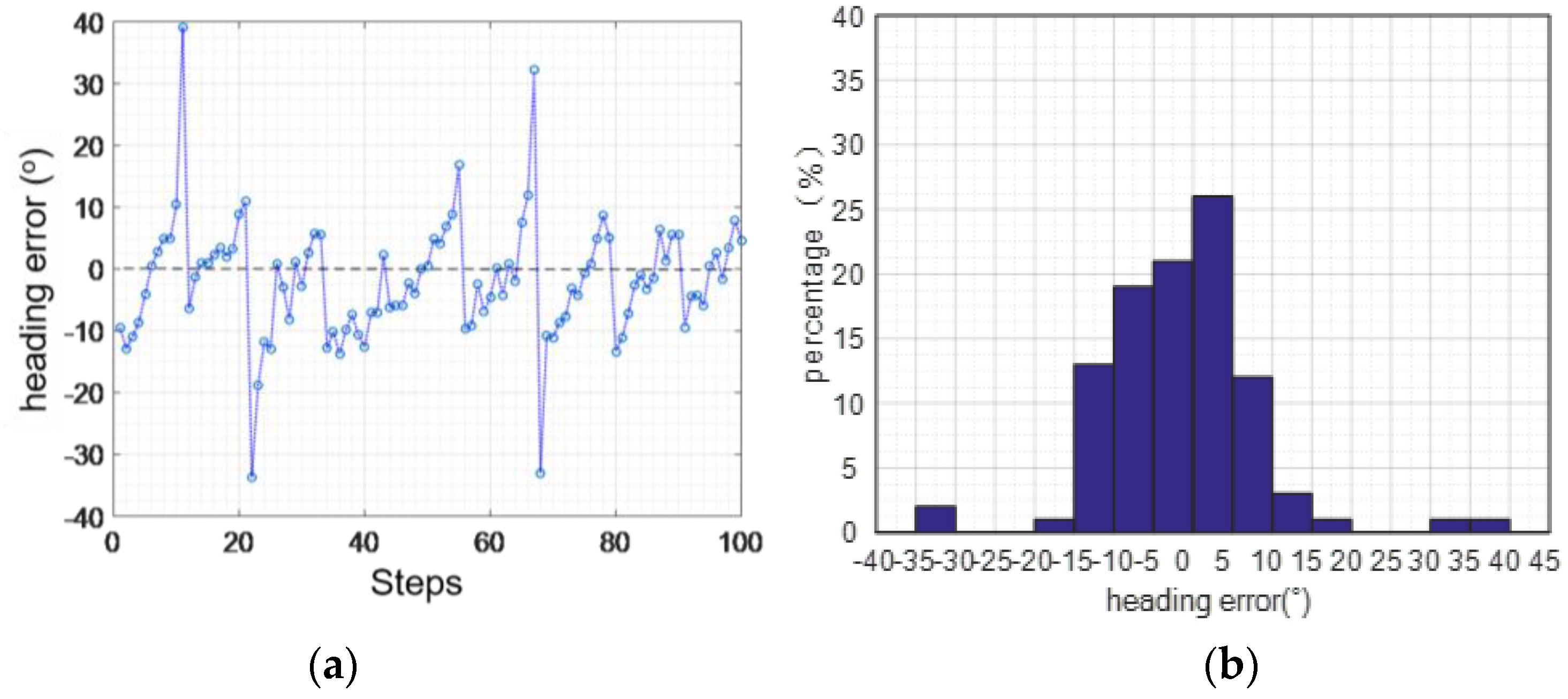
4.2.5. Heading Verification Experiment
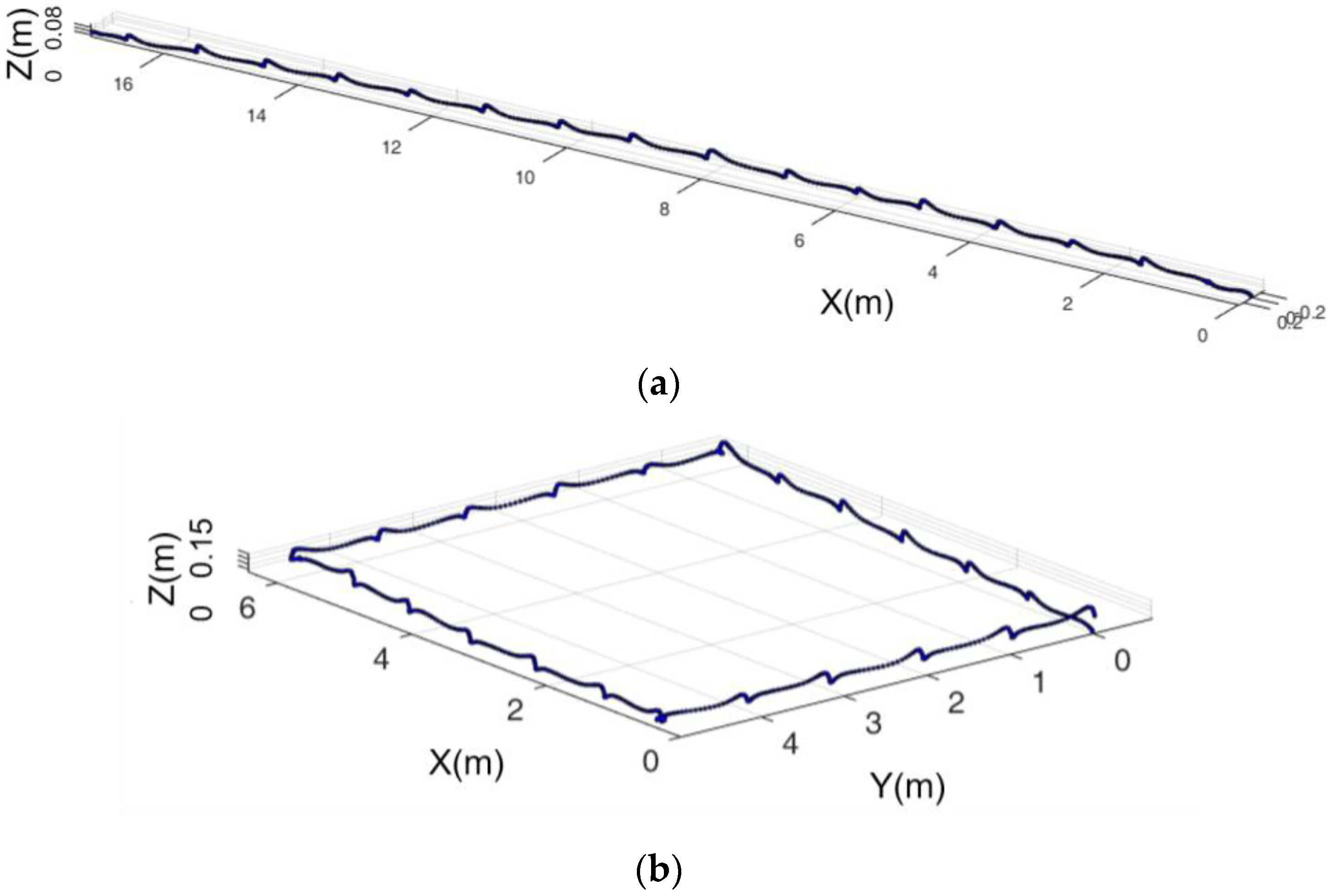
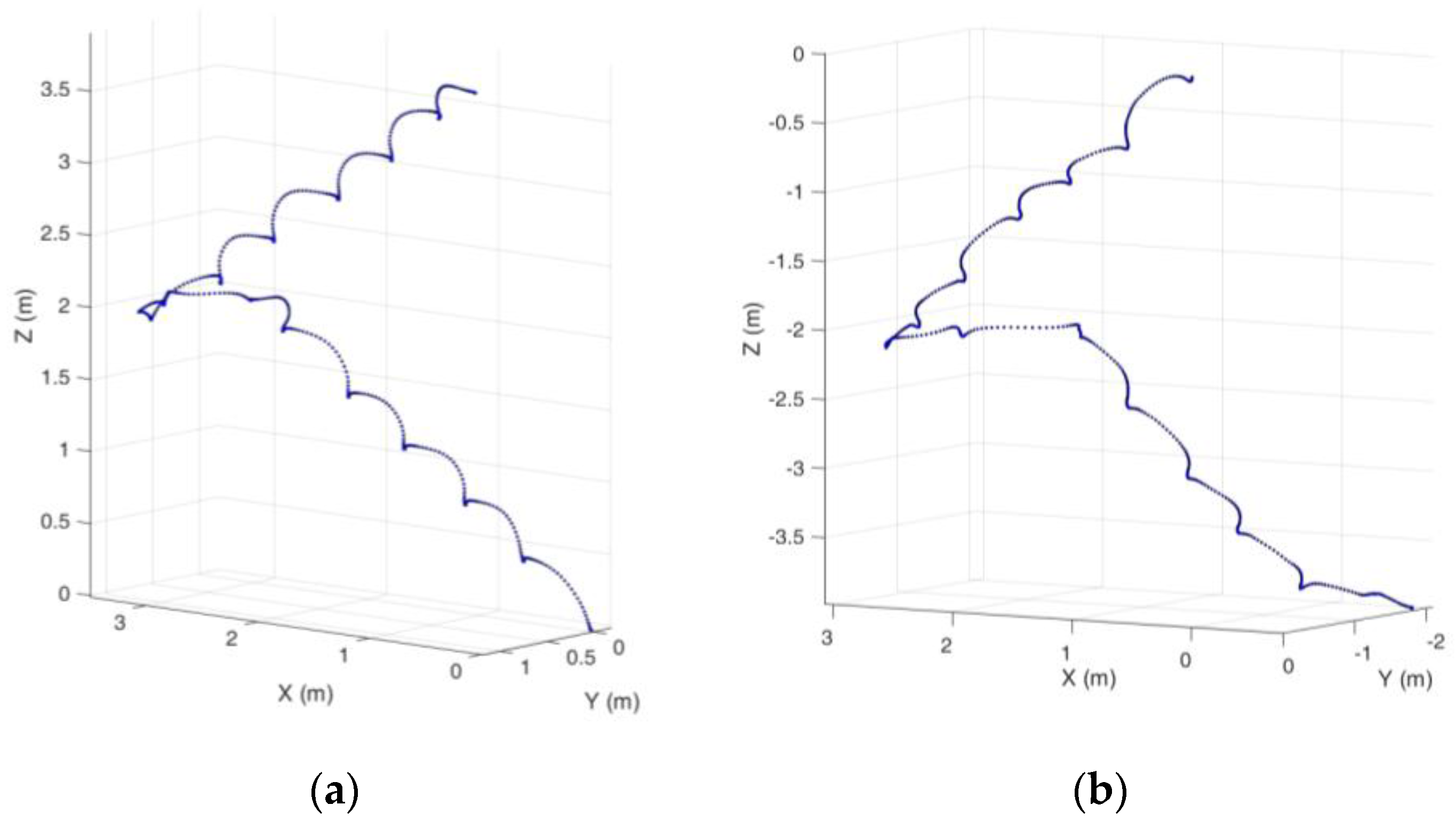
4.2.6. Overall Effect of Indoor 3D Positioning
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Shih, W.Y.; Chen, L.Y.; Lan, K.C. Estimating walking distance with a smart phone. In Proceedings of the IEEE 2012 Fifth International Symposium on Parallel Architectures, Algorithms and Programming (PAAP), Taipei, Taiwan, 17–20 December 2012; pp. 166–171.
- Borriello, G.; Chalmers, M.; LaMarca, A.; Nixon, P. Delivering real-world ubiquitous location systems. Commun. ACM 2005, 48, 36–41. [Google Scholar] [CrossRef] [Green Version]
- Gu, Y.; Lo, A.; Niemegeers, I. A survey of indoor positioning systems for wireless personal networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, J.; Chen, Y.; Gruteser, M.; Yang, J.; Liu, H. E-eyes: Device-free location-oriented activity identification using fine-grained WiFi signatures. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking, Maui, HI, USA, 7–11 September 2014; pp. 617–628.
- Diaz, E.M. Inertial pocket navigation system: Unaided 3D positioning. Sensors 2015, 15, 9156–9178. [Google Scholar] [CrossRef] [PubMed]
- Diaz, E.M.; Gonzalez, A.L.M. Step detector and step length estimator for an inertial pocket navigation system. In Proceedings of the IEEE 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014; pp. 105–110.
- Jahn, J.; Batzer, U.; Seitz, J.; Patino-Studencka, L.; Boronat, J.G. Comparison and evaluation of acceleration based step length estimators for handheld devices. In Proceedings of the IEEE 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–6.
- Harle, R. A survey of indoor inertial positioning systems for pedestrians. IEEE Commun. Surv. Tutor. 2013, 15, 1281–1293. [Google Scholar] [CrossRef]
- Goyal, P.; Ribeiro, V.J.; Saran, H.; Kumar, A. Strap-down pedestrian dead-reckoning system. Measurements 2011, 2, 3. [Google Scholar]
- Li, J.; Wang, Q.; Liu, X.; Zhang, M. An autonomous waist-mounted pedestrian dead reckoning system by coupling low-cost MEMS inertial sensors and FPG receiver for 3D urban navigation. J. Eng. Sci. Technol. 2014, 7, 9–14. [Google Scholar]
- Shin, S.H.; Park, C.G.; Hong, H.S.; Lee, J.M. MEMS-based personal navigator equipped on the user’s body. In Proceedings of the 18th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005.
- Pratama, A.; Hidayat, R. Smartphone-based pedestrian dead reckoning as an indoor positioning system. In Proceedings of the 2012 International Conference on System Engineering and Technology (ICSET), Bandung, Indonesia, 11–12 September 2012; pp. 1–6.
- Foxlin, E. Pedestrian tracking with shoe-mounted inertial sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef] [PubMed]
- Nilsson, J.O.; Skog, I.; Handel, P.; Hari, K.V.S. Foot-mounted INS for everybody—An open-source embedded implementation. In Proceedings of the 2012 IEEE/ION Position Location and Navigation Symposium (PLANS), Myrtle Beach, SC, USA, 23–26 April 2012; pp. 140–145.
- Li, Y.; Wang, J.J. A robust pedestrian navigation algorithm with low cost IMU. In Proceedings of the IEEE 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; pp. 1–7.
- Feliz Alonso, R.; Zalama Casanova, E.; Gómez García-Bermejo, J. Pedestrian tracking using inertial sensors. J. Phys. Agents 2009, 3, 35–43. [Google Scholar] [CrossRef]
- Placer, M.; Kovačič, S. Enhancing indoor inertial pedestrian navigation using a shoe-worn marker. Sensors 2013, 13, 9836–9859. [Google Scholar] [CrossRef] [PubMed]
- Jian, L.; Wang, Y.; Chen, Y.; Yang, J.; Chen, X.; Cheng, J. Tracking vital signs during sleep leveraging off-the-shelf wifi. In Proceedings of the 16th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Hangzhou, China, 22–25 June 2015; pp. 267–276.
- Jiménez, A.R.; Seco, F.; Prieto, J.C.; Guevara, J. Indoor pedestrian navigation using an INS/EKF framework for yaw drift reduction and a foot-mounted IM. In Proceedings of the IEEE 2010 7th Workshop on Positioning Navigation and Communication (WPNC), Dresden, Germany, 11–12 March 2010; pp. 135–143.
- Yun, X.; Calusdian, J.; Bachmann, E.R.; McGhee, R.B. Estimation of human foot motion during normal walking using inertial and magnetic sensor measurements. IEEE Trans. Instrum. Meas. 2012, 61, 2059–2072. [Google Scholar] [CrossRef]
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the IEEE 2011 IEEE International Conference on Rehabilitation Robotics (ICORR), Zurich, Switzerland, 29 June–1 July 2011; pp. 1–7.
- Madgwick, S.O.H. An Efficient Orientation Filter for Inertial and Inertial/Magnetic Sensor Arrays. Report x-io and University of Bristol (UK), 2010. Available online: https://www.samba.org/tridge/UAV/madgwick_internal_report.pdf (accessed on 27 October 2016).
- OpenShoe [EB/OL]. Available online: http://www.openshoe.org/ (accessed on 27 October 2016).
- Nilsson, J.O.; Zachariah, D.; Skog, I.; Händel, P. Cooperative localization by dual foot-mounted inertial sensors and inter-agent ranging. EURASIP J. Adv. Signal Process. 2013, 2013, 1–17. [Google Scholar] [CrossRef]
- Rantakokko, J.; Rydell, J.; Stromback, P.; Händel, P.; Callmer, J.; Törnqvist, D.; Gustafsson, F.; Jobs, M.; Grudén, M. Accurate and reliable soldier and first responder indoor positioning: multisensor systems and cooperative localization. IEEE Wirel. Commun. 2011, 18, 10–18. [Google Scholar] [CrossRef]
- House, S.; Connell, S.; Milligan, I.; Austin, D.; Hayes, T.L.; Chiang, P. Indoor localization using pedestrian dead reckoning updated with RFID-based fiducials. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Boston, MA, USA, 30 August–3 September 2011; pp. 7598–7601.
- Ojeda, L.; Borenstein, J. Personal dead-reckoning system for GPS-denied environments. In Proceedings of the IEEE International Workshop on Safety, Security and Rescue Robotics (SSRR 2007), Rome, Italy, 27–29 September 2007; pp. 1–6.
- Zampella, F.; De Angelis, A.; Skog, I.; Zachariah, D.; Jimenez, A. A constraint approach for UWB and PDR fusion. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012.
- Khan, M.I.; Syrjarinne, J. Investigating effective methods for integration of building’s map with low cost inertial sensors and wifi-based positioning. In Proceedings of the International IEEE 2013 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Montbeliard-Belfort, France, 28–31 October 2013; pp. 1–8.
- Chen, Z.; Zou, H.; Jiang, H.; Zhu, Q.; Soh, Y.; Xie, L. Fusion of WiFi, smartphone sensors and landmarks using the Kalman filter for indoor localization. Sensors 2015, 15, 715–732. [Google Scholar] [CrossRef] [PubMed]
- Woodman, O.J. An introduction to inertial navigation. Tech. Rep. 2007, 14, 15. [Google Scholar]
- Jalil, M.; Butt, F.A.; Malik, A. Short-time energy, magnitude, zero crossing rate and autocorrelation measurement for discriminating voiced and unvoiced segments of speech signals. In Proceedings of the IEEE 2013 International Conference on Technological Advances in Electrical, Electronics and Computer Engineering (TAEECE), Konya, Turkey, 9–11 May 2013; pp. 208–212.
- Han, H.; Yu, J.; Zhu, H.; Chen, Y.; yang, J.; Zhu, Y.; Xue, G.; Li, M. Senspeed: Sensing driving conditions to estimate vehicle speed in urban environments. In Proceedings of the IEEE Conference on Computer Communications (NFOCOM 2014), Toronto, ON, Canada, 27 April–2 May 2014; pp. 727–735.
- Dong, M.; Ota, K.; Liu, A. RMER: Reliable and energy efficient data collection for large-scale wireless sensor networks. IEEE Internet Things J. 2016, 3, 511–519. [Google Scholar] [CrossRef]
- Xie, R.; Liu, A.; Gao, J. A residual energy aware schedule scheme for WSNs employing adjustable awake/sleep duty cycle. Wirel. Pers. Commun. 2016, 90, 1859–1887. [Google Scholar] [CrossRef]





































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types | Average Value (°) | Standard Deviation (°) |
|---|---|---|
| plane | 3.935 | 6.435 |
| upstairs | 107.904 | 36.465 |
| downstairs | −89.464 | 34.907 |
| Error (DSP-1750 [8]) | Error (MPU-6050) | |
|---|---|---|
| walking | 0.19% | 0.40% |
| jogging | 6.25% | 0.36% |
| upstairs | 0.30% | 0.56% |
| downstairs | 0.90% | 0.88% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Liu, G.; Liu, J.; Chen, X.; Ma, X. 3D Tracking via Shoe Sensing. Sensors 2016, 16, 1809. https://doi.org/10.3390/s16111809
Li F, Liu G, Liu J, Chen X, Ma X. 3D Tracking via Shoe Sensing. Sensors. 2016; 16(11):1809. https://doi.org/10.3390/s16111809
Chicago/Turabian StyleLi, Fangmin, Guo Liu, Jian Liu, Xiaochuang Chen, and Xiaolin Ma. 2016. "3D Tracking via Shoe Sensing" Sensors 16, no. 11: 1809. https://doi.org/10.3390/s16111809
APA StyleLi, F., Liu, G., Liu, J., Chen, X., & Ma, X. (2016). 3D Tracking via Shoe Sensing. Sensors, 16(11), 1809. https://doi.org/10.3390/s16111809