
Tunnel Magnetoresistance Sensors with Magnetostrictive Electrodes: Strain Sensors

 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Fabrication
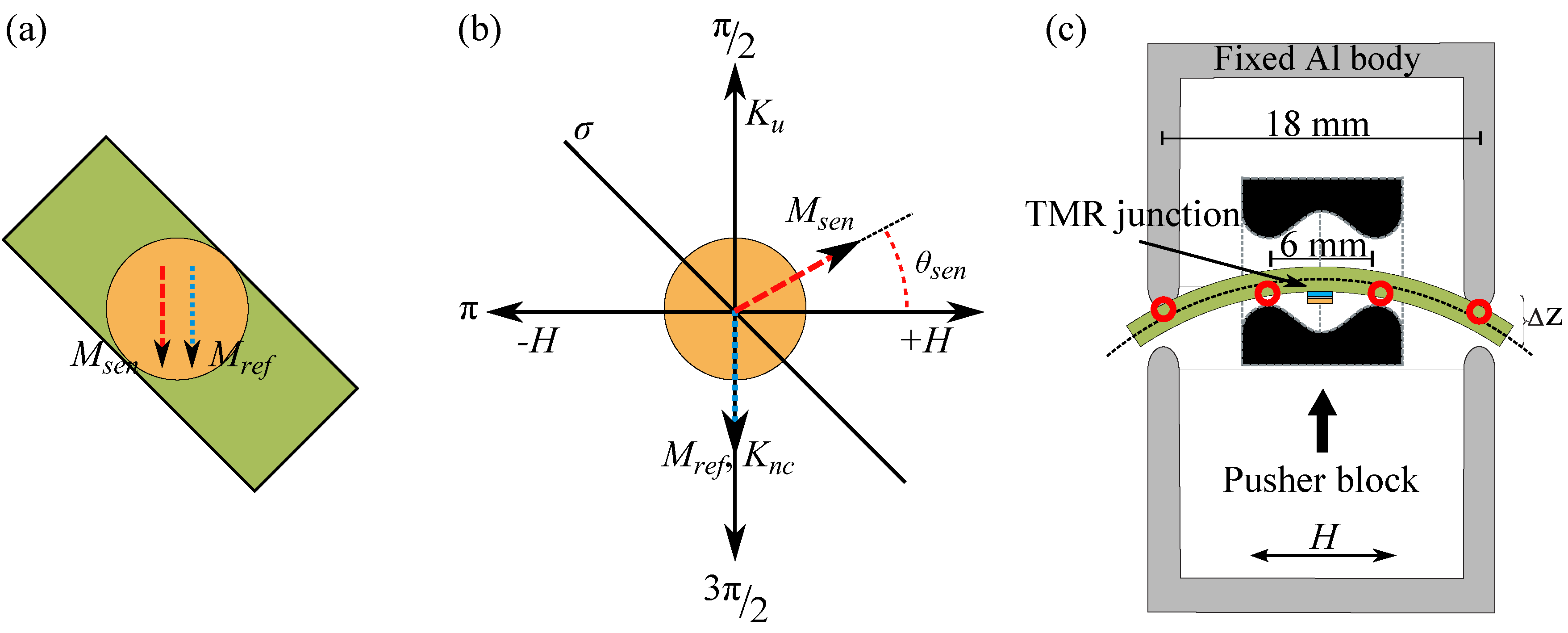
2.2. Modeling
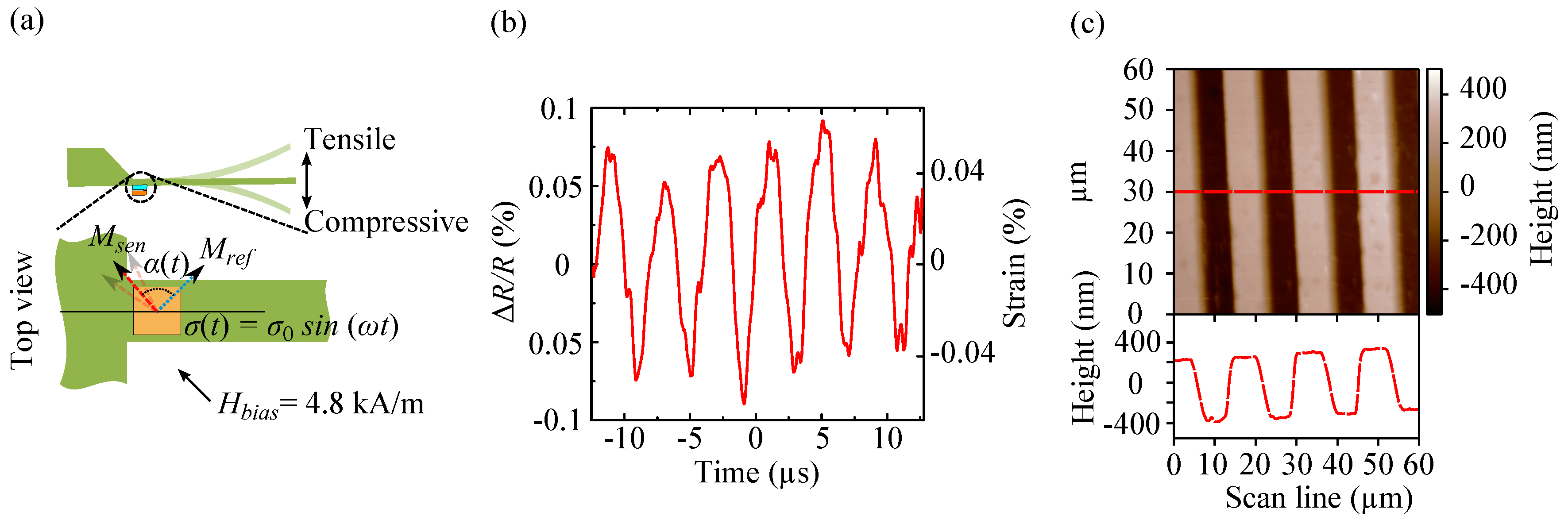
2.3. Experimental
3. Results and Discussion
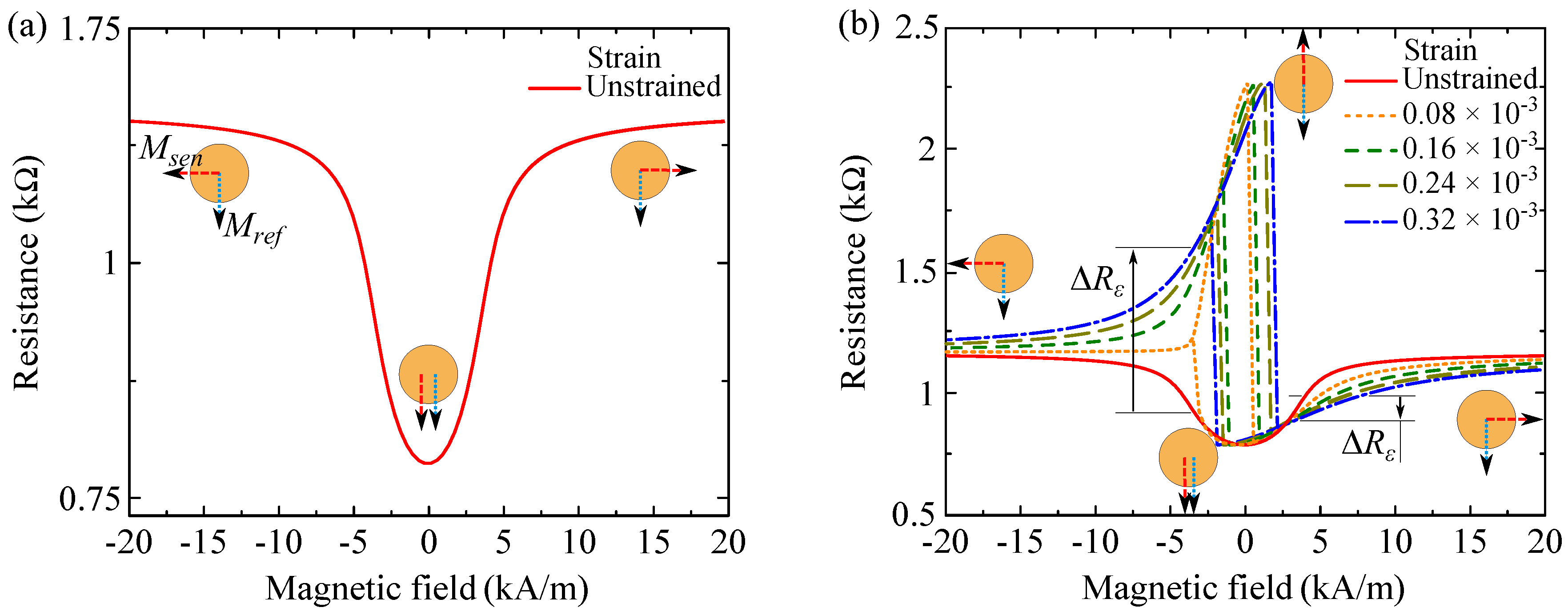
3.1. Modeling of Field Loops
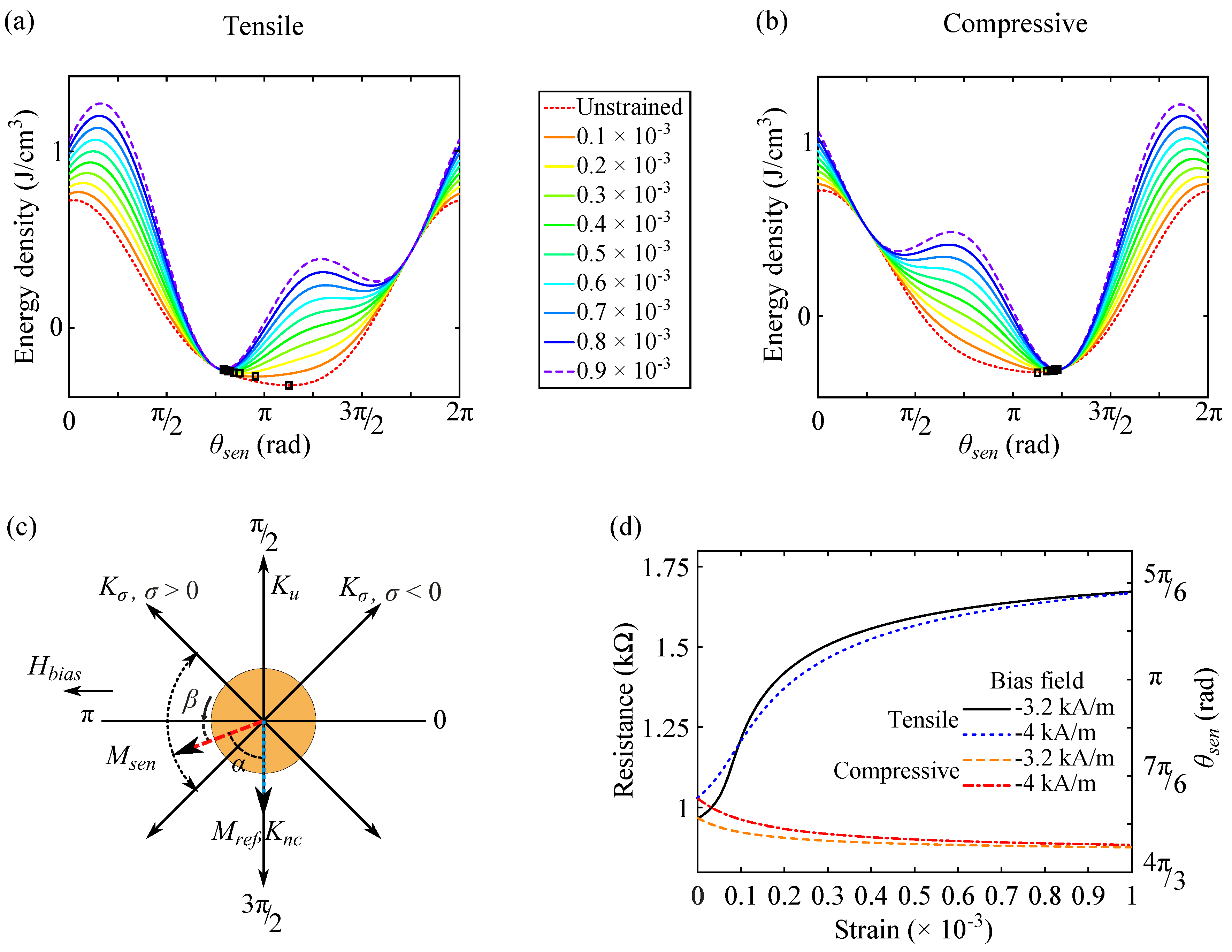
3.2. Modeling of Strain Loops
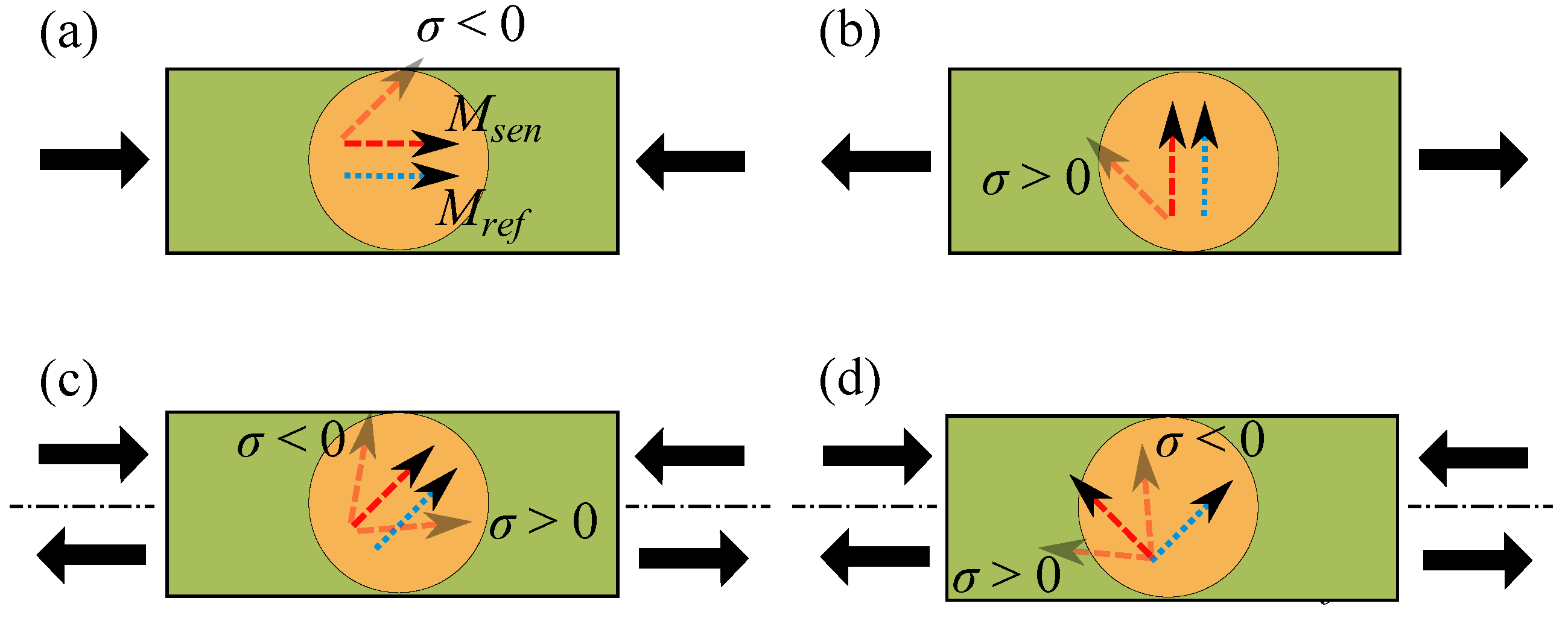
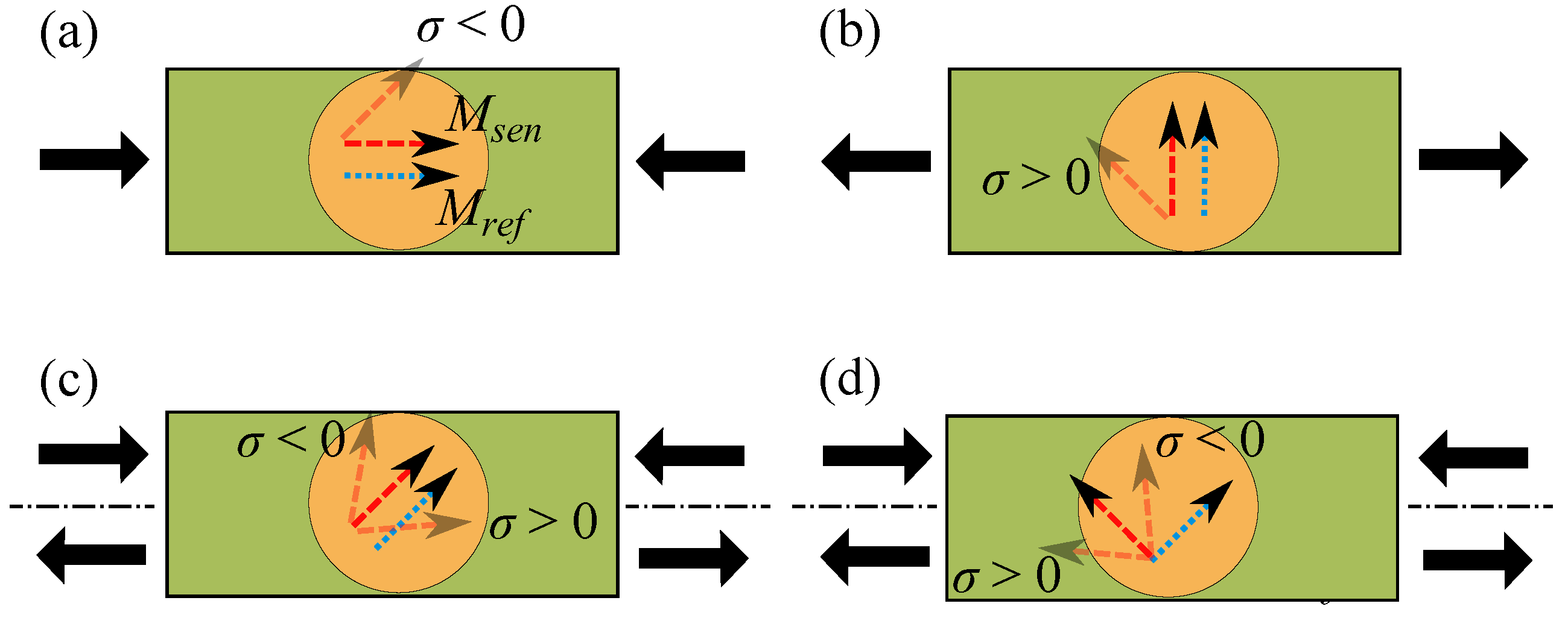
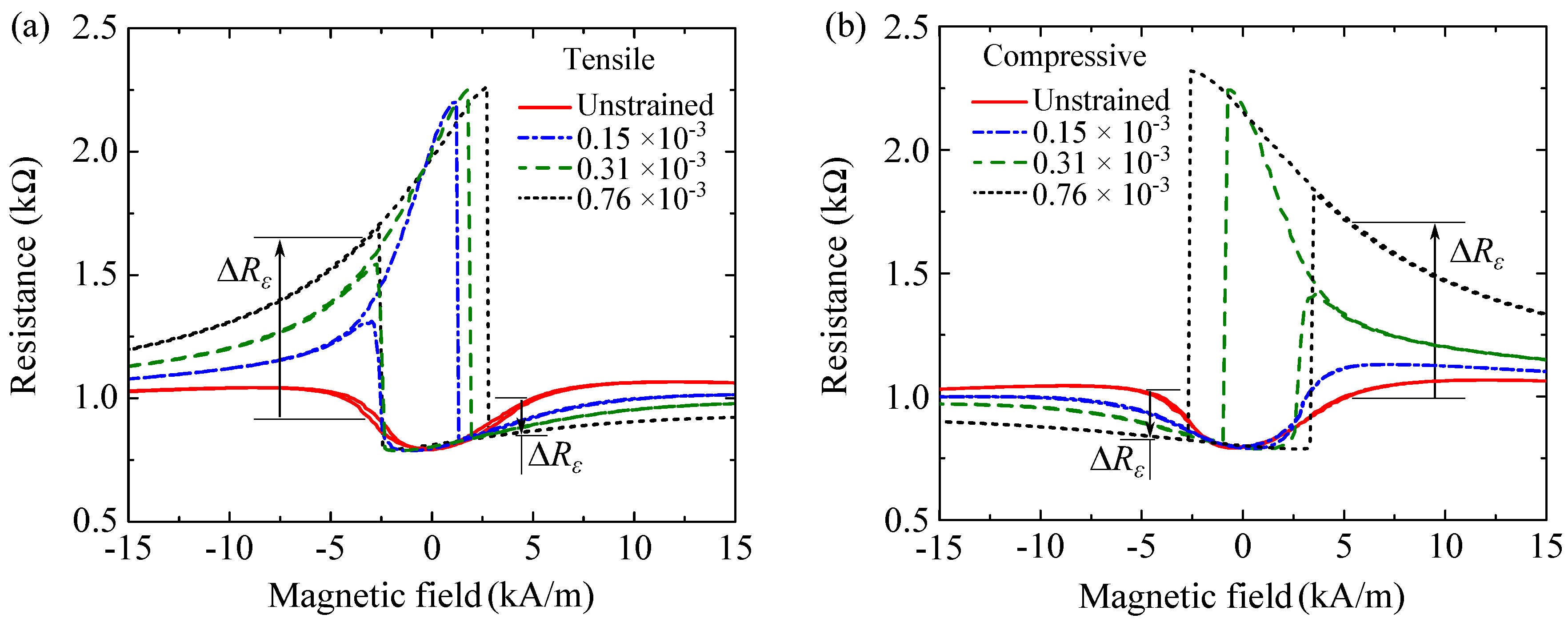
3.3. Mechanical Stress Influence on Loops
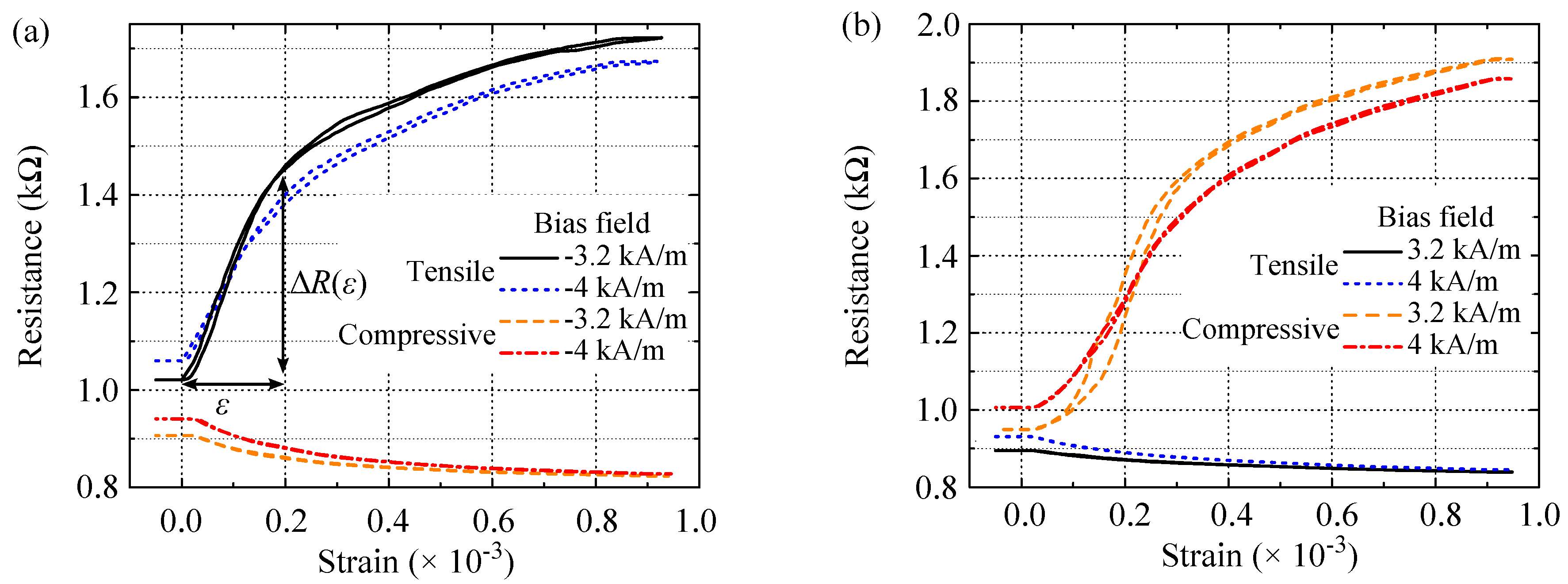
3.4. Strain Sensitivity
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| TMR | Tunnel magnetoresistance |
| MTJ | Magnetic tunnel junction |
| SW | Stoner–Wohlfarth |
| MR | Magnetoresistance |
| AFM | Atomic force microscopy |
References
- Tadigadapa, S.; Mateti, K. Piezoelectric MEMS sensors: State-of-the-art and perspectives. Meas. Sci. Technol. 2009, 20, 092001. [Google Scholar] [CrossRef]
- Barlian, A.A.; Park, W.-T.; Mallon, J.R.; Rastegar, A.J.; Pruitt, B.L. Review: Semiconductor piezoresistance for microsystems. Proc. IEEE 2009, 97, 513–552. [Google Scholar] [CrossRef] [PubMed]
- Tavassolizadeh, A.; Hayes, P.; Rott, K.; Reiss, G.; Quandt, E.; Meyners, D. Highly strain-sensitive magnetostrictive tunnel magnetoresistance junctions. J. Magn. Magn. Mater. 2015, 384, 308–313. [Google Scholar] [CrossRef]
- Sahoo, D.R.; Sebastian, A.; Häberle, W.; Pozidis, H.; Eleftheriou, E. Scanning probe microscopy based on magnetoresistive sensing. Nanotechnology 2011, 22, 145501. [Google Scholar] [CrossRef] [PubMed]
- Meyners, D.; von Hofe, T.; Vieth, M.; Rührig, M.; Schmitt, S.; Quandt, E. Pressure sensor based on magnetic tunnel junctions. J. Appl. Phys. 2009, 105, 07C914. [Google Scholar] [CrossRef]
- Tavassolizadeh, A.; Meier, T.; Rott, K.; Reiss, G.; Quandt, E.; Hölscher, H.; Meyners, D. Self-sensing atomic force microscopy cantilevers based on tunnel magnetoresistance sensors. Appl. Phys. Lett. 2013, 102, 153104. [Google Scholar] [CrossRef]
- O’Handley, R.C.; Chlidress, J.R. New spin-valve magnetic field sensors combined with strain sensing and strain compensation. IEEE Trans. Magn. 1995, 31, 2450–2454. [Google Scholar] [CrossRef]
- Mamin, H.J.; Gurney, B.A.; Wilhoit, D.R.; Speriosu, V.S. High sensitivity spin-valve strain sensor. Appl. Phys. Lett. 1998, 72, 3220–3222. [Google Scholar] [CrossRef]
- Baril, L.; Gurney, B.; Wilhoit, D.; Speriosu, V.S. Magnetostriction in spin valves. J. Appl. Phys. 1999, 85, 5139–5141. [Google Scholar] [CrossRef]
- Duenas, T.; Sehrbrock, A.; Löhndorf, M.; Ludwig, A.; Wecker, J.; Grünberg, P.; Quandt, E. Micro-sensor coupling magnetostriction and magnetoresistive phenomena. J. Magn. Magn. Mater. 2002, 242–245, 1132–1135. [Google Scholar] [CrossRef]
- Wang, D.; Nordman, C.; Qian, Z.; Daughton, J.M.; Myers, J. Magnetostriction effect of amorphous CoFeB thin films and application in spin-dependent tunnel junctions. J. Appl. Phys. 2005, 97, 10C906. [Google Scholar] [CrossRef]
- Löhndorf, M.; Duenas, T.; Tewes, M.; Quandt, E. Highly sensitive strain sensors based on magnetic tunneling junctions. Appl. Phys. Lett. 2002, 81, 313–315. [Google Scholar] [CrossRef]
- Löhndorf, M.; Duenas, T.; Ludwig, A.; Rührig, M.; Wecker, J.; Bürgler, D.; Grünberg, P.; Quandt, E. Strain sensors based on magnetostrictive GMR/TMR structures. IEEE Trans. Magn. 2002, 38, 2826–2828. [Google Scholar] [CrossRef]
- Löhndorf, M.; Dokupil, S.; Bootsmann, M.-T.; Malavé, A.; Rührig, M.; Bär, L.; Quandt, E. Characterization of magnetostrictive TMR pressure sensors by MOKE. J. Magn. Magn. Mater. 2007, 316, e223–e225. [Google Scholar] [CrossRef]
- Meier, T.; Förste, A.; Tavassolizadeh, A.; Rott, K.; Meyners, D.; Gröger, R.; Reiss, G.; Quandt, E.; Schimmel, T.; Hölscher, H. A scanning probe microscope for magnetoresistive cantilevers utilizing a nested scanner design for large-area scans. Beilstein J. Nanotechnol. 2015, 6, 451–461. [Google Scholar] [CrossRef] [PubMed]
- Bootsmann, M.-T.; Dokupil, S.; Quandt, E.; Ivanov, T.; Abedinov, N.C.; Löhndorf, M. Switching of magnetostrictive micro-dot arrays by mechanical strain. IEEE Trans. Magn. 2005, 41, 3505–3507. [Google Scholar] [CrossRef]
- Jaffrès, H.; Lacour, D.; Nguyen Van Dau, F.; Briatico, J.; Petroff, F.; Vaurès, A. Angular dependence of the tunnel magnetoresistance in transition-metal-based junctions. Phys. Rev. B 2001, 64, 064427. [Google Scholar] [CrossRef]
- Xu, X.; Li, M.; Hu, J.; Dai, J.; Xia, W. Strain-induced magnetoresistance for novel strain sensors. J. Appl. Phys. 2010, 108, 033916. [Google Scholar] [CrossRef]
- Hauser, H.; Rührig, M.; Wecker, J. Hysteresis modeling of tunneling magnetoresistance strain sensor elements. J. Appl. Phys. 2004, 95, 7258–7260. [Google Scholar] [CrossRef]
- Meyners, D.; Puchalla, J.; Dokupil, S.; Löhndorf, M.; Quandt, E. Magnetoelectrical sensors for mechanical measurements. ESC Trans. 2007, 25, 223–233. [Google Scholar]
- Lebedev, G.A.; Viala, B.; Lafont, T.; Zakharov, D.I.; Cugat, O.; Delamare, J. Converse magnetoelectric effect dependence with CoFeB composition in ferromagnetic/piezoelectric composites. J. Appl. Phys. 2012, 111, 07C725. [Google Scholar] [CrossRef]
- Tavassolizadeh, A. Miniaturized Tunnel Magnetoresistance Sensors for Novel Applications of Atomic Force Microscopy. Ph.D. Dissertation, Kiel University, Kiel, Germany, January 2016. [Google Scholar]
- Platt, C.L.; Minor, M.K.; Klemmer, T.J. Magnetic and structural properties of FeCoB thin films. IEEE Trans. Magn. 2001, 37, 2302–2304. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Quantity | Value |
|---|---|
| Saturation magnetization () | 1030 kA/m |
| Induced anisotropy () | 2050 J/m |
| Young’s modulus (Y) | 169 GPa |
| Isotropic magnetostriction () | [23] |
| H(kA/m) | −3.2 | −4 | 3.2 | 4 | |
|---|---|---|---|---|---|
| GF | Tensile | −150 | −250 | ||
| Compressive | −260 | −335 | - | ||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tavassolizadeh, A.; Rott, K.; Meier, T.; Quandt, E.; Hölscher, H.; Reiss, G.; Meyners, D. Tunnel Magnetoresistance Sensors with Magnetostrictive Electrodes: Strain Sensors. Sensors 2016, 16, 1902. https://doi.org/10.3390/s16111902
Tavassolizadeh A, Rott K, Meier T, Quandt E, Hölscher H, Reiss G, Meyners D. Tunnel Magnetoresistance Sensors with Magnetostrictive Electrodes: Strain Sensors. Sensors. 2016; 16(11):1902. https://doi.org/10.3390/s16111902
Chicago/Turabian StyleTavassolizadeh, Ali, Karsten Rott, Tobias Meier, Eckhard Quandt, Hendrik Hölscher, Günter Reiss, and Dirk Meyners. 2016. "Tunnel Magnetoresistance Sensors with Magnetostrictive Electrodes: Strain Sensors" Sensors 16, no. 11: 1902. https://doi.org/10.3390/s16111902
APA StyleTavassolizadeh, A., Rott, K., Meier, T., Quandt, E., Hölscher, H., Reiss, G., & Meyners, D. (2016). Tunnel Magnetoresistance Sensors with Magnetostrictive Electrodes: Strain Sensors. Sensors, 16(11), 1902. https://doi.org/10.3390/s16111902