
Assessing Motor Fluctuations in Parkinson’s Disease Patients Based on a Single Inertial Sensor

 ,
, 
Abstract
:1. Introduction
2. Related Work
3. Methods
3.1. Participants
3.2. Sensor Device
3.3. Data Collection
3.3.1. Evaluation Database of Inertial Signals
3.3.2. Learning Database
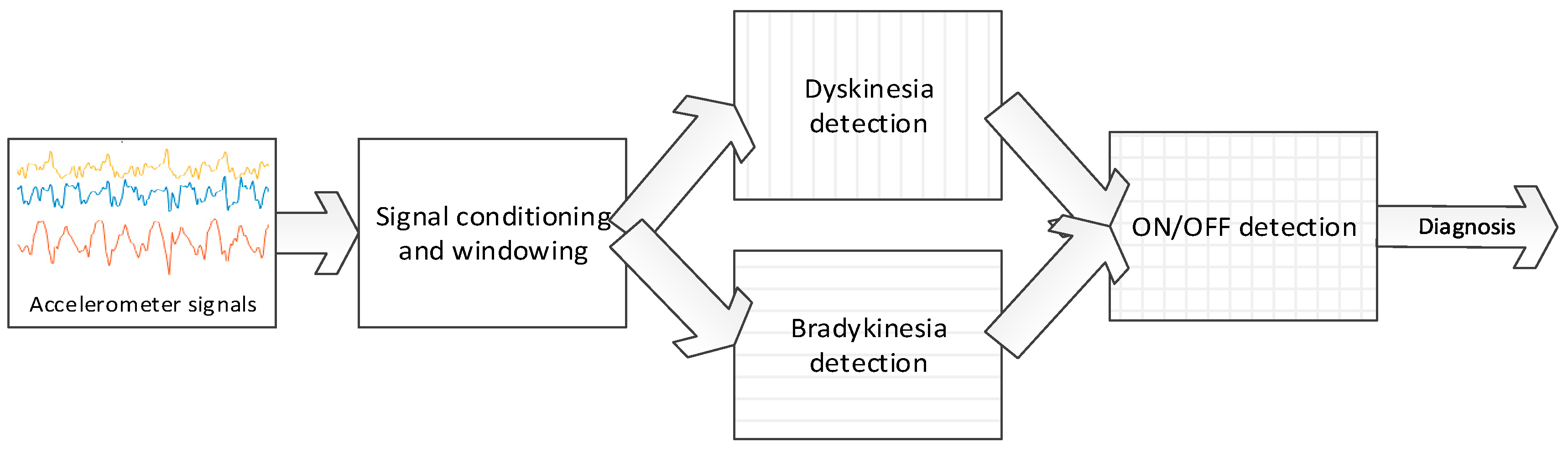
4. Signal Processing Methods
4.1. Dyskinesia Detection
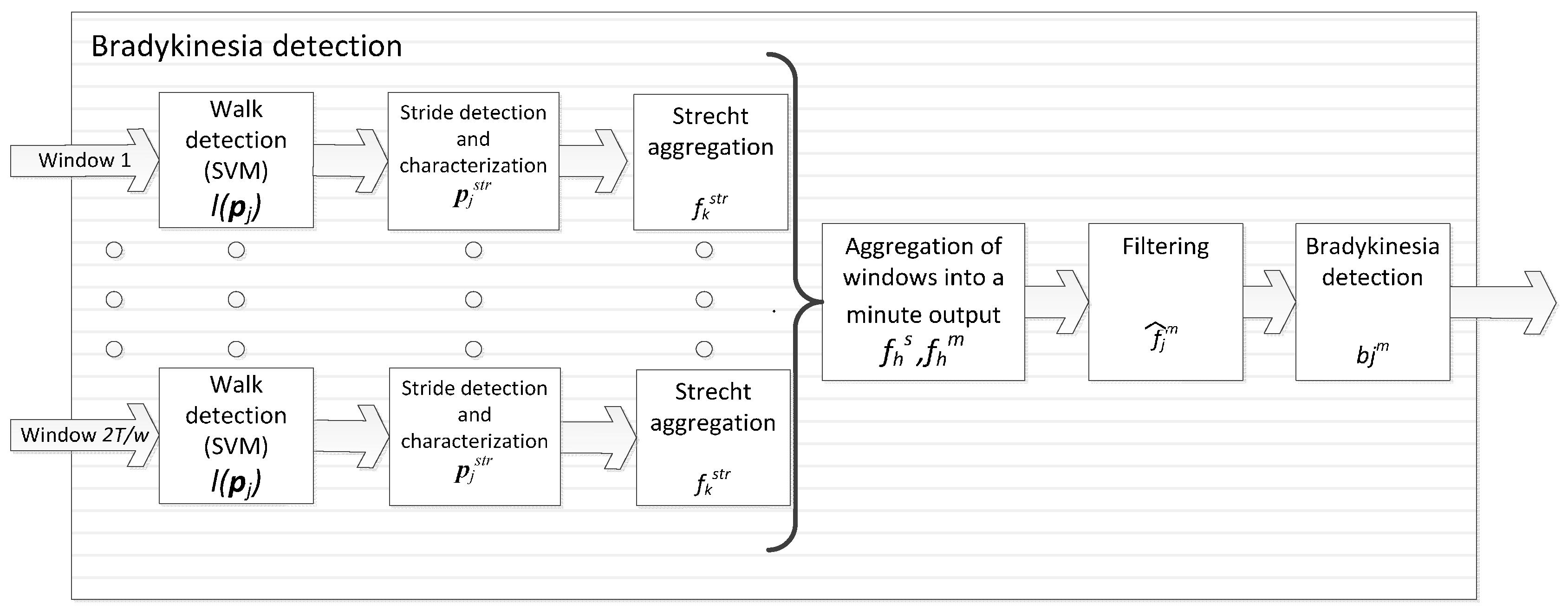
4.2. Bradykinesia Detection
4.3. Self-Adapting Bradykinesia Detection Algorithm
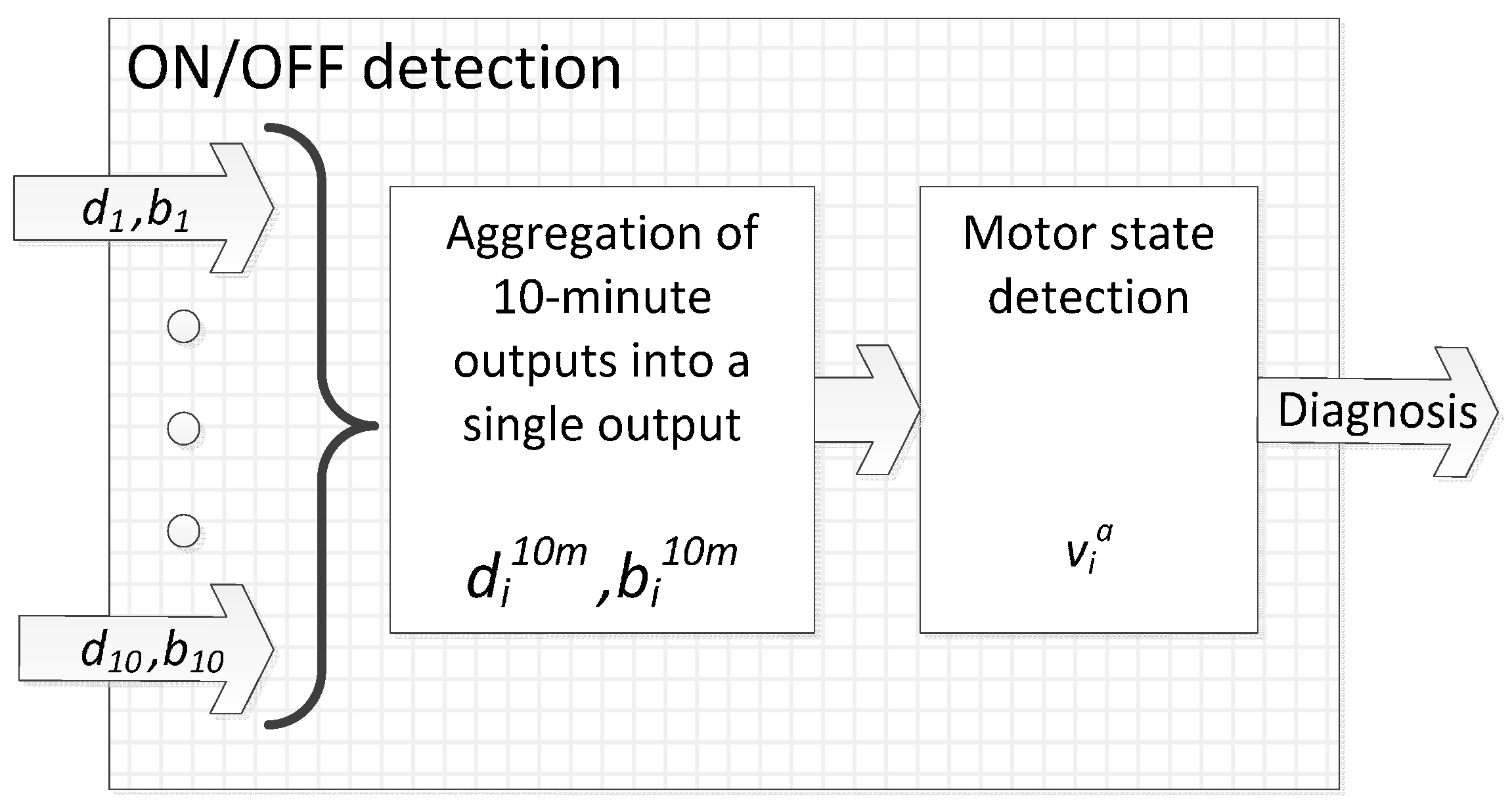
4.4. ON/OFF Motor States Detection

4.5. Evaluation
5. Results and Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jankovic, J. Parkinson’s disease: Clinical features and diagnosis. J. Neurol. Neurosurg. Psychiatry 2008, 79, 368–376. [Google Scholar] [CrossRef] [PubMed]
- Artieda, J.; Quesada, P.; Obeso, J.A.; Martínez-Lage, J.M. Fisiopatología de la rigidez en la enfermedad de Parkinson: Estúdios eletrofisiológicos. In Enfermedad de Parkinson y Movimientos Anormales; EUNSA: Pamplona, Spain, 1986. [Google Scholar]
- Wiesendanger, M. Pathophysiology of Muscle Tone; Springer Science & Business Media: New York, NY, USA, 2012; Volume 9. [Google Scholar]
- Andrews, C.J.; Burke, D.; Lance, J.W. The response to muscle stretch and shortening in Parkinsonian rigidity. Brain 1972, 95, 795–812. [Google Scholar] [CrossRef] [PubMed]
- Landau, W.M.; Struppler, A.; Mehls, O. A comparative electromyographic study of the reactions to passive movement in parkinsonism and in normal subjects. Neurology 1966, 16, 34–48. [Google Scholar] [CrossRef] [PubMed]
- Ross, G.W.; Petrovitch, H.; Abbott, R.D.; Nelson, J.; Markesbery, W.; Davis, D.; Hardman, J.; Launer, L.; Masaki, K.; Tanner, C.M.; et al. Parkinsonian signs and substantia nigra neuron density in decendents elders without PD. Ann. Neurol. 2004, 56, 532–539. [Google Scholar] [CrossRef] [PubMed]
- Post, B.; Merkus, M.P.; De Haan, R.J.; Speelman, J.D. Prognostic factors for the progression of Parkinson’s disease: A systematic review. Mov. Disord. 2007, 22, 1839–1851. [Google Scholar] [CrossRef] [PubMed]
- Lozza, C.; Marie, R.M.; Baron, J.C. The metabolic substrates of bradykinesia and tremor in uncomplicated Parkinson’s disease. Neuroimage 2002, 17, 688–699. [Google Scholar] [CrossRef] [PubMed]
- Chávez-León, E.; Ontiveros-Uribe, M.P.; Carrillo-Ruiz, J.D. La enfermedad de Parkinson: Neurología para psiquiatras. Salud Ment. 2013, 36, 315–324. [Google Scholar] [CrossRef]
- Fabbrini, G.; Brotchie, J.M.; Grandas, F.; Nomoto, M.; Goetz, C.G. Levodopa-induced dyskinesias. Mov. Disord. 2007, 22, 1379–1389. [Google Scholar] [CrossRef] [PubMed]
- Abbruzzese, G.; Barone, P.; Bonuccelli, U.; Lopiano, L.; Antonini, A. Continuous intestinal infusion of levodopa/carbidopa in advanced Parkinson’s disease: Efficacy, safety and patient selection. Funct. Neurol. 2012, 27, 147–154. [Google Scholar] [PubMed]
- Santini, E.; Valjent, E.; Fisone, G. Parkinson’s disease: Levodopa-induced dyskinesia and signal transduction. FEBS J. 2008, 275, 1392–1399. [Google Scholar] [CrossRef] [PubMed]
- Luquin, M.R.; Scipioni, O.; Vaamonde, J.; Gershanik, O.; Obeso, J.A. Levodopa-induced dyskinesias in Parkinson’s disease: Clinical and pharmacological classification. Mov. Disord. 1992, 7, 117–124. [Google Scholar] [CrossRef] [PubMed]
- Antonini, A.; Tolosa, E. Apomorphine and levodopa infusion therapies for advanced Parkinson’s disease: Selection criteria and patient management. Expert Rev. Neurother. 2009, 9, 859–867. [Google Scholar] [CrossRef] [PubMed]
- Rodríguez-Molinero, A.; Pérez-Martínez, D.A.A.; Gálvez-Barrón, C.; Hernández-Vara, J.; Martínez-Castrillo, J.C.C.; Álvarez, R.; de Fabregues, O.; Samà, A.; Pérez-López, C.; Romagosa, J.; et al. Remote control of apomorphine infusion rate in Parkinson’s disease: Real-time dose variations according to the patients’ motor state. A proof of concept. Parkinsonism Relat. Disord. 2015, 21, 996–998. [Google Scholar] [CrossRef] [PubMed]
- Papapetropoulos, S.S. Patient diaries as a clinical endpoint in Parkinson’s disease clinical trials. CNS Neurosci. Ther. 2012, 18, 380–387. [Google Scholar] [CrossRef] [PubMed]
- Zwartjes, D.; Heida, T.; van Vugt, J.; Geelen, J.; Veltink, P. Ambulatory Monitoring of Activities and Motor Symptoms in Parkinson’s Disease. IEEE Trans. Biomed. Eng. 2010, 57, 2778–2786. [Google Scholar] [CrossRef] [PubMed]
- Salarian, A.; Russmann, H.; Wider, C.; Burkhard, P.R.; Vingerhoets, F.J.G.; Aminian, K. Quantification of tremor and bradykinesia in Parkinson’s disease using a novel ambulatory monitoring system. IEEE Trans. Biomed. Eng. 2007, 54, 313–322. [Google Scholar] [CrossRef] [PubMed]
- Pastorino, M.; Cancela, J.; Arredondo, M.T.; Pansera, M.; Pastor-Sanz, L.; Villagra, F.; Pastor, M.A.; Martin, J.A. Assessment of bradykinesia in Parkinson’s disease patients through a multi-parametric system. In Proceedings of the 2011 Annual International Conference of the Engineering in Medicine and Biology Society (EMBC), Boston, MA, USA, 30 August–3 September 2011; pp. 1810–1813.
- Cancela, J.; Pansera, M.; Arredondo, M.T.; Estrada, J.J.; Pastorino, M.; Pastor-Sanz, L.; Villalar, J.L. A comprehensive motor symptom monitoring and management system: The bradykinesia case. In Proceedings of the 2010 Annual International Conference of the Engineering in Medicine and Biology Society (EMBC), Buenos Aires, Argentina, 31 August–4 September 2010; pp. 1008–1011.
- Keijsers, N.L.; Horstink, M.W.; Gielen, S.C. Ambulatory motor assessment in Parkinson’s disease. Mov. Disord. 2006, 21, 34–44. [Google Scholar] [CrossRef] [PubMed]
- Patel, S.; Lorincz, K.; Hughes, R.; Huggins, N.; Growdon, J.; Standaert, D.; Akay, M.; Dy, J.; Welsh, M.; Bonato, P.; et al. Monitoring Motor Fluctuations in Patients With Parkinson’ s Disease Using Wearable Sensors. IEEE Trans. Inf. Technol. Biomed. 2009, 13, 864–873. [Google Scholar] [CrossRef] [PubMed]
- Salarian, A.; Russmann, H.; Vingerhoets, F.J.G.; Dehollain, C.; Blanc, Y.; Burkhard, P.R.; Aminian, K. Gait assessment in Parkinson’s disease: Toward an ambulatory system for long-term monitoring. IEEE Trans. Biomed. Eng. 2004, 51, 1434–1443. [Google Scholar] [CrossRef] [PubMed]
- Hoff, J.I.; van der Meer, V.; van Hilten, J.J. Accuracy of Objective Ambulatory Accelerometry in Detecting Motor Complications in Patients With Parkinson Disease. Clin. Neuropharmacol. 2004, 27, 53–57. [Google Scholar] [CrossRef] [PubMed]
- Rissanen, S. Analysis of surface EMG signal morphology in Parkinson’s disease. Physiol. Meas. 2007, 28, 1507–1521. [Google Scholar] [CrossRef] [PubMed]
- Cole, B.T.; Roy, S.H.; De Luca, C.J.; Nawab, S.H. Dynamical learning and tracking of tremor and dyskinesia from wearable sensors. IEEE Trans. Neural Syst. Rehabil. Eng. 2014, 22, 982–991. [Google Scholar] [CrossRef] [PubMed]
- Meigal, A.Y.; Rissanen, S.M.; Tarvainen, M.P.; Airaksinen, O.; Kankaanpää, M.; Karjalainen, P.A. Non-linear EMG parameters for differential and early diagnostics of Parkinson’s disease. Front. Neurol. 2013, 4, 135. [Google Scholar] [CrossRef] [PubMed]
- Pourmoghaddam, A.; Dettmer, M.; O’Connor, D.P.; Paloski, W.H.; Layne, C.S. Identification of changing lower limb neuromuscular activation in Parkinson’s disease during treadmill gait with and without levodopa using a nonlinear analysis index. Parkinsons. Dis. 2015, 2015, 497825. [Google Scholar] [CrossRef] [PubMed]
- Mazilu, S.; Calatroni, A.; Gazit, E.; Mirelman, A.; Hausdorff, J.M.; Troester, G.; Troster, G. Prediction of Freezing of Gait in Parkinson’s From Physiological Wearables: An Exploratory Study. IEEE J. Biomed. Heal. Inform. 2015, 19, 1843–1854. [Google Scholar] [CrossRef] [PubMed]
- Moore, S.T.; MacDougall, H.G.; Ondo, W.G. Ambulatory monitoring of freezing of gait in Parkinson’s disease. J. Neurosci. Methods 2008, 167, 340–348. [Google Scholar] [CrossRef] [PubMed]
- Bächlin, M.; Roggen, D.; Plotnik, M.; Hausdorff, J.M.; Giladi, N.; Tröster, G. Online Detection of Freezing of Gait in Parkinson’s Disease Patients: A Performance Characterization. In Proceedings of the International Conference on Body Area Networks, Los Angeles, CA, USA, 1–3 April 2009.
- Brown, P.; Oliviero, A.; Mazzone, P.; Insola, A.; Tonali, P.; Di Lazzaro, V. Dopamine Dependency of Oscillations between Subthalamic Nucleus and Pallidum in Parkinson’s Disease. J. Neurosci. 2001, 21, 1033–1038. [Google Scholar] [PubMed]
- Pérez-López, C.; Samà, A.; Rodríguez-Martín, D.; Moreno-Aróstegui, J.M.; Cabestany, J.; Bayes, A.; Mestre, B.; Alcaine, S.; Quispe, P.; Laighin, G.G.Ó.; et al. Dopaminergic-induced dyskinesia assessment based on a single belt-worn accelerometer. Artif. Intell. Med. 2015, 67, 47–56. [Google Scholar] [CrossRef] [PubMed]
- Tsipouras, M.G.; Tzallas, A.T.; Rigas, G.; Tsouli, S.; Fotiadis, D.I.; Konitsiotis, S. An automated methodology for levodopa-induced dyskinesia: Assessment based on gyroscope and accelerometer signals. Artif. Intell. Med. 2012, 55, 127–135. [Google Scholar] [CrossRef] [PubMed]
- Chelaru, M.I.; Duval, C.; Jog, M. Levodopa-induced dyskinesias detection based on the complexity of involuntary movements. J. Neurosci. Methods 2010, 186, 81–89. [Google Scholar] [CrossRef] [PubMed]
- Manson, A.J.; Brown, P.; O’sullivan, J.D.; Asselman, P.; Buckwell, D.; Lees, A.J. An ambulatory dyskinesia monitor. J. Neurol. Neurosurg. Psychiatry 2000, 68, 196–201. [Google Scholar] [CrossRef] [PubMed]
- Dai, H.; Lin, H.; Lueth, T.C. Quantitative assessment of parkinsonian bradykinesia based on an inertial measurement unit. Biomed. Eng. Online 2015, 14, 68. [Google Scholar] [CrossRef] [PubMed]
- Moore, S.T.; MacDougall, H.G.; Gracies, J.M.; Cohen, H.S.; Ondo, W.G. Long-term monitoring of gait in Parkinson’s disease. Gait Posture 2007, 26, 200–207. [Google Scholar] [CrossRef] [PubMed]
- Griffiths, R.I.; Kotschet, K.; Arfon, S.; Xu, Z.M.; Johnson, W.; Drago, J.; Evans, A.; Kempster, P.; Raghav, S.; Horne, M.K. Automated assessment of bradykinesia and dyskinesia in Parkinson’s disease. J. Parkinsons Dis. 2012, 2, 47–55. [Google Scholar] [PubMed]
- Salarian, A. Ambulatory Monitoring of Motor Functions in Patients with Parkinson´s Disease Using Kinematic Sensors. Ph.D. Thesis, École Polytechnique Federale de Lausanne, Lausanne, Switzerland, 2006. [Google Scholar]
- Pastorino, M.; Cancela, J.; Arredondo, M.T.; Pastor-Sanz, L.; Contardi, S.; Valzania, F. Preliminary results of ON/OFF detection using an integrated system for Parkinson’s disease monitoring. Conf. Proc. IEEE Eng. Med. Biol. Soc. 2013, 2013, 941–944. [Google Scholar] [PubMed]
- Cancela, J.; Pastorino, M.; Tzallas, A.T.; Tsipouras, M.G.; Rigas, G.; Arredondo, M.T.; Fotiadis, D.I. Wearability assessment of a wearable system for Parkinson’s disease remote monitoring based on a body area network of sensors. Sensors 2014, 14, 17235–17255. [Google Scholar] [CrossRef] [PubMed]
- Keijsers, N.L.; Horstink, M.W.; Gielen, S.C. Automatic assessment of levodopa-induced dyskinesias in daily life by neural networks. Mov. Disord. 2003, 18, 70–80. [Google Scholar] [CrossRef] [PubMed]
- Tsipouras, M.G.; Tzallas, A.T.; Rigas, G.; Bougia, P.; Fotiadis, D.I.; Konitsiotis, S. Automated Levodopa-induced dyskinesia assessment. In Proceedings of the 2010 Annual International Conference of the Engineering in Medicine and Biology Society (EMBC), Buenos Aires, Argentina, 31 August–4 September 2010; pp. 2411–2414.
- Stebbins, G.T.; Goetz, C.G.; Lang, A.E.; Cubo, E. Factor analysis of the motor section of the unified Parkinson’s disease rating scale during the off-state. Mov. Disord. 1999, 14, 585–589. [Google Scholar] [CrossRef]
- Mera, T.O.; Heldman, D.A.; Espay, A.J.; Payne, M.; Giuffrida, J.P. Feasibility of home-based automated Parkinson’s disease motor assessment. J. Neurosci. Methods 2012, 203, 152–156. [Google Scholar] [CrossRef] [PubMed]
- Hughes, A.J.; Daniel, S.E.; Kilford, L.; Lees, A.J. Accuracy of clinical diagnosis of idiopathic Parkinson’s disease: A clinico-pathological study of 100 cases. J. Neurol. Neurosurg. Psychiatry 1992, 55, 181–184. [Google Scholar] [CrossRef] [PubMed]
- Rodríguez-Martín, D.; Pérez-López, C.; Samà, A.; Cabestany, J.; Català, A. A Wearable Inertial Measurement Unit for Long-Term Monitoring in the Dependency Care Area. Sensors 2013, 13, 14079–14104. [Google Scholar] [CrossRef] [PubMed]
- Yang, C.C.; Hsu, Y.L. A review of accelerometry-based wearable motion detectors for physical activity monitoring. Sensors 2010, 10, 7772–7788. [Google Scholar] [CrossRef] [PubMed]
- Gjoreski, H.; Lustrek, M.; Gams, M. Accelerometer Placement for Posture Recognition and Fall Detection. In Proceedings of the Accelerometer Placement for Posture Recognition and Fall Detection 2011 Seventh International Conference on Intelligent Environments, Nottingham, UK, 25–28 July 2011; pp. 47–54.
- Mathie, M.J.; Basilakis, J.; Celler, B.G. A system for monitoring posture and physical activity using accelerometers. In Proceedings of the 2001 Conference Proceedings of the 23rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Istambul, Turkey, 25–28 October 2001; Volume 4, pp. 3654–3657.
- Samà, A.; Perez-Lopez, C.; Romagosa, J.; Rodriguez-Martin, D.; Catala, A.; Cabestany, J.; Perez-Martinez, D.A.A.; Rodriguez-Molinero, A.; Català, A.; Cabestany, J.; et al. Dyskinesia and motor state detection in Parkinson’s Disease patients with a single movement sensor. In Proceedings of the 2012 34th Annual International Conference of the Engineering in Medicine and Biology Society, San Diego, CA, USA, 28 August–1 September 2012.
- Rodríguez-Molinero, A.; Samà, A.; Pérez-Martínez, D.A.; Pérez López, C.; Romagosa, J.; Bayés, À.; Sanz, P.; Calopa, M.; Gálvez-Barrón, C.; de Mingo, E.; et al. Validation of a Portable Device for Mapping Motor and Gait Disturbances in Parkinson’s Disease. JMIR mHealth uHealth 2015, 3, e9. [Google Scholar] [CrossRef] [PubMed]
- Berardelli, A.; Rothwell, J.C.; Thompson, P.D.; Hallett, M. Pathophysiology of bradykinesia in Parkinson’s disease. Brain 2001, 124, 2131–2146. [Google Scholar] [CrossRef] [PubMed]
- Deuschl, G.; Bain, P.; Brin, M. Consensus statement of the Movement Disorder Society on Tremor. Ad Hoc Scientific Committee. Mov. Disord. 1998, 13, 2–23. [Google Scholar] [CrossRef] [PubMed]
- Bloxham, C.A.C.; Mindel, T.C.A.; Frith, C.D. Initiation and execution of predictable and unpredictable movements in Parkinson’s disease. Brain 1984, 107, 371–384. [Google Scholar] [CrossRef] [PubMed]
- Rodriguez-Martin, D.; Samà, A.; Perez-Lopez, C.; Català, A.; Cabestany, J.; Rodriguez-Molinero, A. SVM-based posture identification with a single waist-located triaxial accelerometer. Expert Syst. Appl. 2013, 40, 7203–7211. [Google Scholar] [CrossRef]
- Najafi, B.; Aminian, K.; Paraschiv-Ionescu, A.; Loew, F.; Bula, C.J.; Robert, P. Ambulatory system for human motion analysis using a kinematic sensor: Monitoring of daily physical activity in the elderly. IEEE Trans. Biomed. Eng. 2003, 50, 711–723. [Google Scholar] [CrossRef] [PubMed]
- Barralon, P.; Vuillerme, N.; Noury, N. Walk detection with a kinematic sensor: Frequency and wavelet comparison. Conf. Proc. IEEE Eng. Med. Biol. Soc. 2006, 1, 1711–1714. [Google Scholar] [PubMed]
- Najafi, B.; Aminian, K.; Loew, F.; Blanc, Y.; Robert, P.A. Measurement of stand-sit and sit-stand transitions using a miniature gyroscope and its application in fall risk evaluation in the elderly. IEEE Trans. Biomed. Eng. 2002, 49, 843–851. [Google Scholar] [CrossRef] [PubMed]
- Nyquist, H. Certain topics in telegraph transmission theory. Am. Inst. Electr. Eng. Trans. 1928, 47, 617–644. [Google Scholar] [CrossRef]
- Robnik-Šikonja, M.; Kononenko, I. Theoretical and Empirical Analysis of ReliefF and RReliefFt. Mach. Learn. 2003, 53, 1–2. [Google Scholar] [CrossRef]
- Arlot, S.; Celisse, A. A survey of cross-validation procedures for model selection. Stat. Surv. 2010, 4, 40–79. [Google Scholar] [CrossRef]
- Zijlstra, W.; Hof, A.L. Assessment of spatio-temporal gait parameters from trunk accelerations during human walking. Eur. J. Appl. Physiol. 2003, 18, 39–44. [Google Scholar] [CrossRef]
- Riaz, Q.; Vögele, A.; Krüger, B.; Weber, A. One Small Step for a Man: Estimation of Gender, Age and Height from Recordings of One Step by a Single Inertial Sensor. Sensors 2015, 15, 31999–32019. [Google Scholar] [CrossRef] [PubMed]
- Vögele, A.; Krüger, B.; Klein, R. Efficient Unsupervised Temporal Segmentation of Human Motion. In Proceedings of the ACM SIGGRAPH/Eurographics Symposium on Computer Animation, Copenhagen, Denmark, 21–23 July 2014.
- Riaz, Q.; Tao, G.; Krüger, B.; Weber, A. Motion reconstruction using very few accelerometers and ground contacts. Graph. Models 2015, 79, 23–38. [Google Scholar] [CrossRef]
- Cavanaugh, J.T.; Ellis, T.D.; Earhart, G.M.; Ford, M.P.; Foreman, K.B.; Dibble, L.E. Capturing Ambulatory Activity Decline in Parkinson Disease. J. Neurol. Phys. Ther. 2012, 36, 51–57. [Google Scholar] [CrossRef] [PubMed]
- Rochester, L.; Chastin, S.F.M.; Lord, S.; Baker, K.; Burn, D.J. Understanding the impact of deep brain stimulation on ambulatory activity in advanced Parkinson’s disease. J. Neurol. 2012, 259, 1081–1086. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Year | Number of Patients | Number of Sensors | Time Assessment | ON-OFF Results |
|---|---|---|---|---|---|
| Pastorino et al. [41] | 2013 | 2 | 5 | 4 h, 2 days, unscripted activities | 88.2% correspondence with UPDRS scales |
| Pastorino et al. [19] | 2011 | 24 | 5 | Scripted activities | 74.4% accuracy |
| Cancela et al. [20] | 2010 | 20 | 5 | Specific movements | Brad. detection: 70% (walking), 86.6% (upper limbs) |
| Keijsers et al. [21] | 2006 | 23 | 6 | 3 h activities, laboratory settings | 96% sensitivity, 95% specificity |
| Patel et al. [22] | 2009 | 12 | 8 | Specific movements | Error: 3.4% in tremor, 2.2 in brad, and 3.2% in dysk |
| Hoff et al. [24] | 2004 | 50 | 2 | One hour and a half | 70% accuracy |
| Patient | Age | H & Y | Gender | UPDRS/Motor State | Dyskinesia | Motor Fluctuations | Bradykinesia | Rigidity | Tremor | Postural Instability | FoG |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 61 | 2.5 | Female | 29/OFF | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| 2 | 59 | 3 | Female | 46/OFF | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| 3 | 70 | 3 | Female | 29/OFF | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| 4 | 49 | 2.5 | Male | 19/INT | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| 5 | 68 | 2.5 | Male | 16/INT | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| 6 | 80 | 2.5 | Male | 11/ON | ✓ | ✓ | ✓ | ✓ | ✓ | ||
| 7 | 63 | 2.5 | Female | 38/INT | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| 8 | 57 | 2.5 | Male | 6/ON | ✓ | ✓ | ✓ | ✓ | |||
| 9 | 61 | 2.5 | Male | 25/OFF | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| 10 | 66 | 2.5 | Male | 17/INT | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| 11 | 64 | 4 | Male | 62/OFF | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| 12 | 63 | 2.5 | Male | 7/ON | ✓ | ✓ | ✓ | ✓ | ✓ | ||
| 13 | 57 | 2.5 | Male | 9/ON | ✓ | ✓ | ✓ | ✓ | ✓ | ||
| 14 | 60 | 2.5 | Female | 8/ON | ✓ | ✓ | ✓ | ✓ | |||
| 15 | 59 | 2.5 | Male | 11/INT | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Parameter | Algorithm | Description | Value |
|---|---|---|---|
| Dyskinesia | Threshold for dyskinetic band | 1.75 | |
| Dyskinesia | Threshold for postural transition band | 0.95 | |
| Dyskinesia | Threshold for walk band | 1 | |
| Dyskinesia | Threshold for the probability of dyskinesia occurrence in 1 min | 0.4 | |
| Dyskinesia | Threshold for the confidence of dyskinesia occurrence in 1 min | 0.3 | |
| Bradykinesia | Balance between empirical error and hyperplane margin | 10 | |
| γ | Bradykinesia | RBF kernel hyper-parameter | 0.1 |
| , , , | Bradykinesia | SVM model. Obtained by solving the SVM-related optimization process | - |
| Bradykinesia | Patient-dependent fluency threshold to determine the presence or absence of bradykinesia. | Self-tuned (see Section 4.3) |
| Variable | Algorithm | Description |
|---|---|---|
| Dyskinesia | Power spectra in dyskinetic band | |
| Dyskinesia | Power spectra in postural transition band | |
| Dyskinesia | Power spectra in walk band | |
| Dyskinesia | Dyskinesia detection in window h | |
| Dyskinesia | Dyskinesia detection in the j-th 1-min period | |
| ON/OFF | Dyskinesia detection in the i-th 10-min period | |
| Dyskinesia | number of time windows in which the condition was not held | |
| Bradykinesia | Vector of the features that characterize the window of the accelerometer signal (for walking detection) | |
| Bradykinesia | Window label according to video observations (for walking detection) | |
| Bradykinesia | SVM output (walk/no walk) for a given window represented by | |
| Bradykinesia | Power spectra of the stride j | |
| Bradykinesia | Number of strides detected in the walking stretch k | |
| Bradykinesia | Averaged fluency value for the strides within the walking stretch k | |
| Bradykinesia | Averaged fluency value of the strides done within minute h | |
| Bradykinesia | Standard deviation of the fluency values corresponding to the strides done in the minute h | |
| Bradykinesia | Number of strides analyzed in minute h | |
| Bradykinesia | Fluency weighted value for minute j | |
| Bradykinesia | Filtering coefficient for minute h | |
| Bradykinesia | Weight for fluency value in minute j | |
| Bradykinesia | The existence of bradykinesia evaluated for minute j | |
| ON/OFF | Bradykinesia detection in the i-th 10-min period | |
| ON/OFF | Motor state estimation done by the algorithm in the k-th 10-min period | |
| . | ON/OFF | Time of the kth motor state estimation done by the algorithm (corresponding to the first minute of the 10-min period) |
| ON/OFF | i-th motor state annotation given by a patient that corresponds to time | |
| ON/OFF | Time of the annotation i given by a patient |
| Patient | Accuracy | Specificity | Sensitivity | TP/TN/FP/FN | Total Outputs (ON/OFF/INT) | “Unknown” (n. br.+dy.) | Outputs Used | Total Labels | Labels Used |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 81.82% | 83.33% | 80.00% | 4/5/1/1 | 19 (6/5/8) | 7 (0) | 11 | 10 | 7 |
| 2 | 100.00% | 100.00% | 100.00% | 1/15/0/0 | 29 (15/1/13) | 14 (0) | 16 | 16 | 8 |
| 3 | 100.00% | 100.00% | NaN | 0/27/0/0 | 34 (27/0/7) | 21 (0) | 27 | 19 | 13 |
| 4 | 94.74% | 100.00% | 92.31% | 12/6/0/1 | 38 (7/12/19) | 21 (0) | 19 | 22 | 10 |
| 5 | 91.89% | 91.89% | NaN | 0/68/6/0 | 102 (68/6/28) | 25 (0) | 74 | 44 | 33 |
| 6 | 87.50% | 83.33% | 100.00% | 4/10/2/0 | 53 (10/6/37) | 37 (0) | 16 | 33 | 9 |
| 7 | 92.31% | 100.00% | 80.00% | 4/8/0/1 | 19 (9/4/6) | 7 (0) | 13 | 9 | 7 |
| 8 | 83.87% | 73.33% | 93.75% | 15/11/4/1 | 48 (12/19/17) | 27 (0) | 31 | 30 | 15 |
| 9 | 93.33% | 94.00% | 90.00% | 9/47/3/1 | 93 (48/12/33) | 51 (0) | 60 | 52 | 33 |
| 10 | 83.33% | 100.00% | 66.67% | 4/6/0/2 | 23 (8/4/11) | 31 (0) | 12 | 25 | 9 |
| 11 | 85.19% | 84.00% | 100.00% | 2/21/4/0 | 34 (21/6/7) | 20 (0) | 27 | 24 | 14 |
| 12 | 92.59% | 91.30% | 100.00% | 4/21/2/0 | 37 (21/6/10) | 20 (2) | 27 | 25 | 16 |
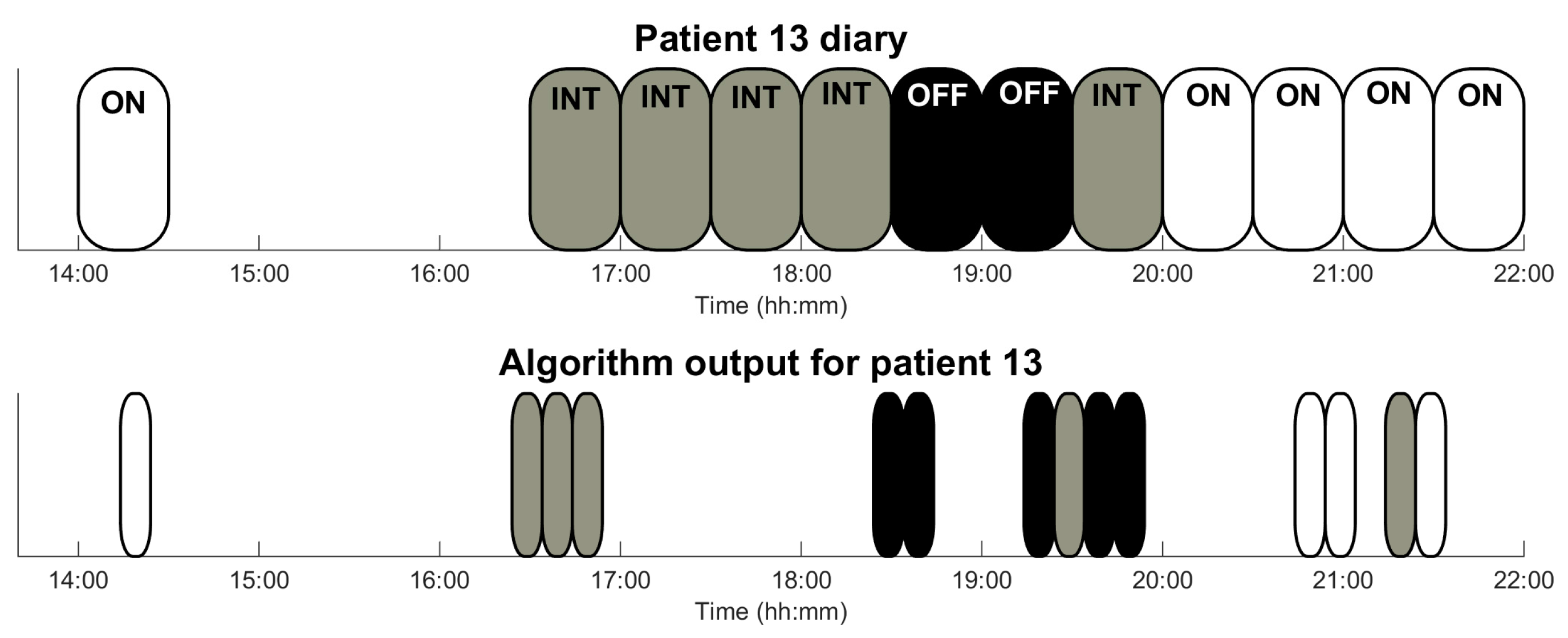
| 13 | 95.83% | 95.45% | 100.00% | 2/21/1/0 | 42 (21/3/18) | 94 (0) | 24 | 48 | 17 |
| 14 | 91.67% | 91.67% | NaN | 0/11/1/0 | 19 (11/1/7) | 30 (0) | 12 | 21 | 10 |
| 15 | 100.00% | 100.00% | 100.00% | 4/3/0/0 | 9 (3/4/2) | 18 (1) | 7 | 13 | 4 |
| Predicted | ||||
|---|---|---|---|---|
| Positive | Negative | |||
| Real | Positive | 65 | 7 | 72 |
| Negative | 24 | 280 | 304 | |
| 89 | 287 | |||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pérez-López, C.; Samà, A.; Rodríguez-Martín, D.; Català, A.; Cabestany, J.; Moreno-Arostegui, J.M.; De Mingo, E.; Rodríguez-Molinero, A. Assessing Motor Fluctuations in Parkinson’s Disease Patients Based on a Single Inertial Sensor. Sensors 2016, 16, 2132. https://doi.org/10.3390/s16122132
Pérez-López C, Samà A, Rodríguez-Martín D, Català A, Cabestany J, Moreno-Arostegui JM, De Mingo E, Rodríguez-Molinero A. Assessing Motor Fluctuations in Parkinson’s Disease Patients Based on a Single Inertial Sensor. Sensors. 2016; 16(12):2132. https://doi.org/10.3390/s16122132
Chicago/Turabian StylePérez-López, Carlos, Albert Samà, Daniel Rodríguez-Martín, Andreu Català, Joan Cabestany, Juan Manuel Moreno-Arostegui, Eva De Mingo, and Alejandro Rodríguez-Molinero. 2016. "Assessing Motor Fluctuations in Parkinson’s Disease Patients Based on a Single Inertial Sensor" Sensors 16, no. 12: 2132. https://doi.org/10.3390/s16122132
APA StylePérez-López, C., Samà, A., Rodríguez-Martín, D., Català, A., Cabestany, J., Moreno-Arostegui, J. M., De Mingo, E., & Rodríguez-Molinero, A. (2016). Assessing Motor Fluctuations in Parkinson’s Disease Patients Based on a Single Inertial Sensor. Sensors, 16(12), 2132. https://doi.org/10.3390/s16122132