
A Survey on Underwater Acoustic Sensor Network Routing Protocols



Abstract
:1. Introduction
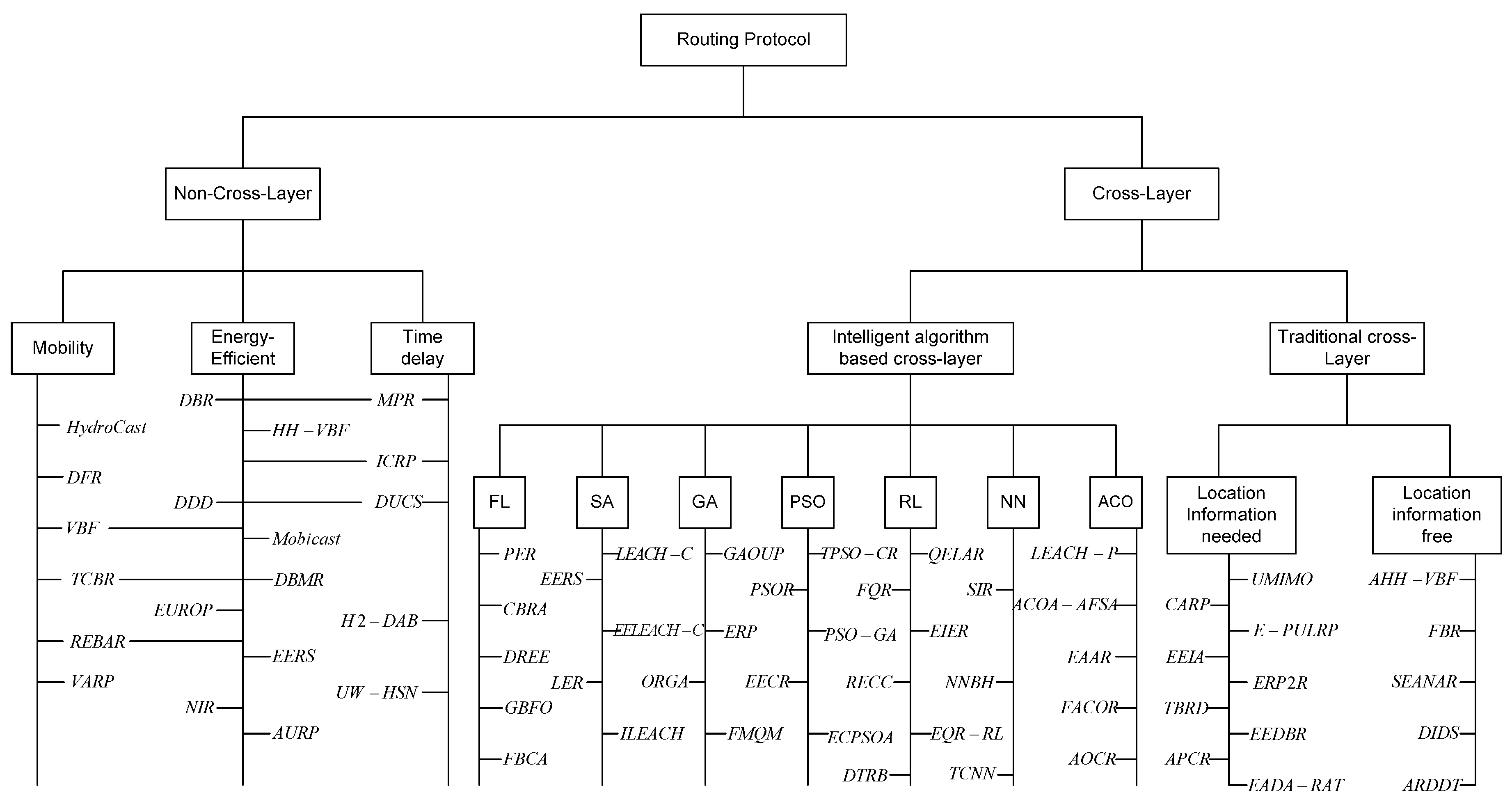
- As the cross-layer design method has become more and more important in recent years, we classify the routing protocols based on the cross-layer design method and non-cross-layer design method. To the best of our knowledge, our survey is the first paper that provides a detailed classification based on cross-layer design methods.
- Considering that the intelligent algorithms can effectively improve the routing performance, we also review the intelligent algorithm-based routing protocols which can provide a wide range of concepts for routing protocol design.
- To give researchers clear and direct insights for the development of underwater acoustic sensor network routing protocols, in this paper, we investigate the development trends in UASN routing protocol design in recent years.
2. The Background of Routing Protocol Design
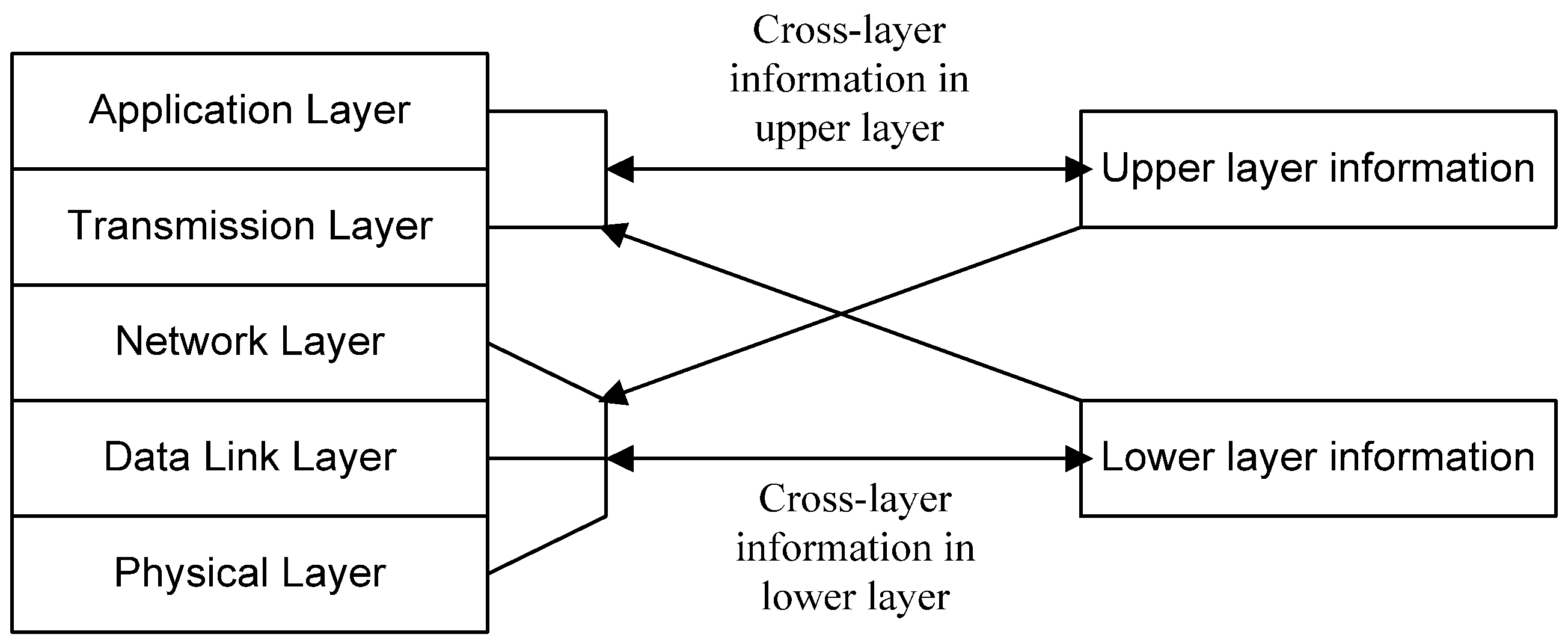
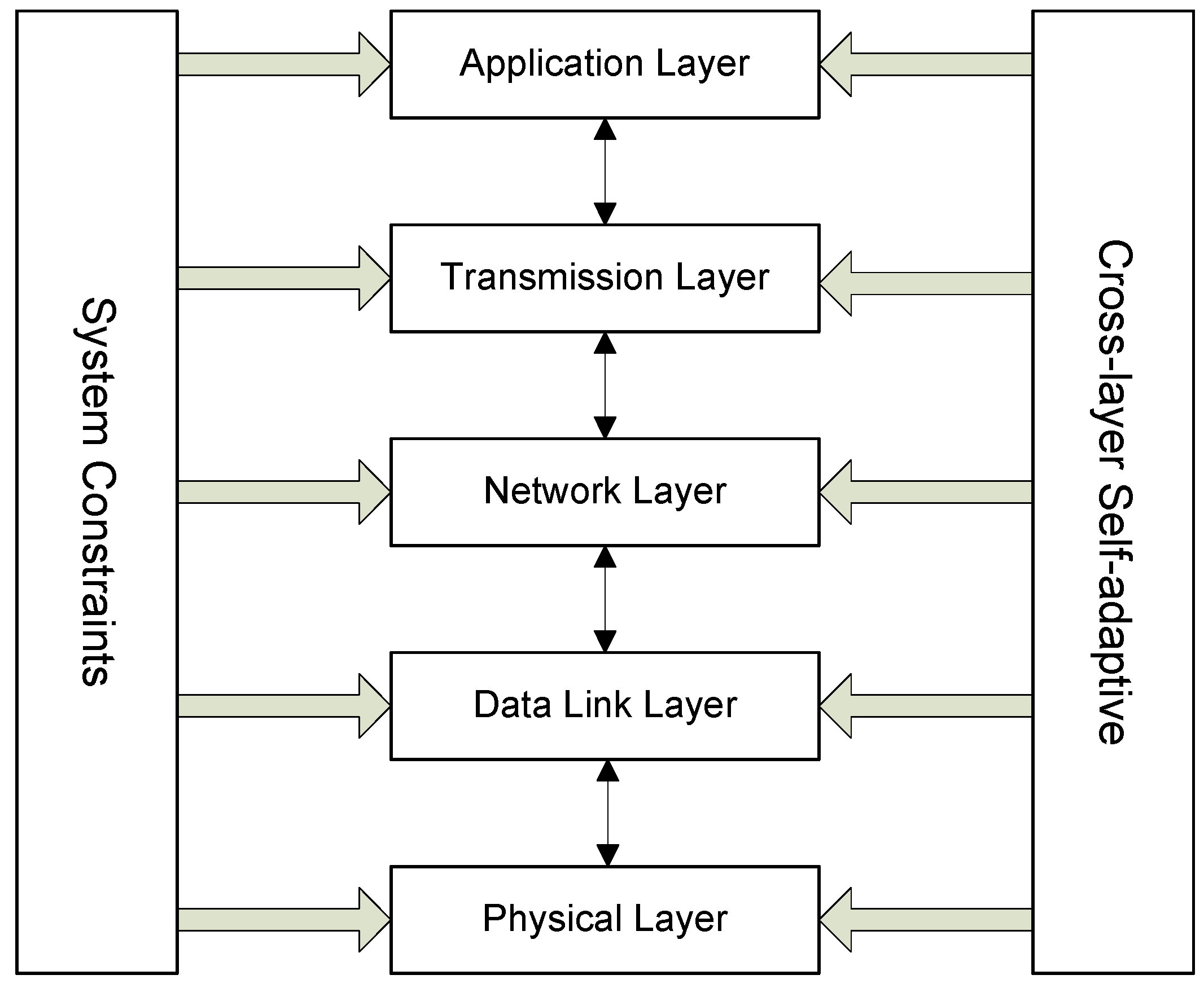
2.1. The Principle of Cross-Layer Design
- The scheduling technology. The scheduling technologies include node access scheduling, link utilization scheduling, network application scheduling, resource reserve, and data transmission priority allocation. The scheduling technology can relax the burstiness of network flow and make the system more appropriate for changing networks [10,11].
- The diversified technology. The diversified technologies include link characteristic diversity, routing chosen diversity, application requirement diversity, and access technology diversity, etc. The diversity can enhance the system capability to adapt the network dynamics and improve the network reliability [12,13,14].
- The self-adaptive mechanism. The term self-adaptive means the protocols and the applications have the ability to adapt to changing channel conditions and network topologies. The self-adaptive mechanisms include link layer adaptive, network layer adaptive, and application layer adaptive. By cooperating with the diversified technology and the scheduling technology, the self-adaptive mechanism can greatly improve the system robustness [15,16].
2.2. The Intelligent Algorithm
3. The Knowledge of Underwater Acoustic Sensor Networks
3.1. The Characteristics of Underwater Acoustic Communication
3.1.1. High propagation delay
3.1.2. High energy consumption
3.1.3. Low bandwidth and data rate
3.1.4. High noise and interference
3.1.5. Highly dynamic topology
3.2. The Energy Consumption
3.3. The Propagation Delay
3.4. The Movement of Underwater Sensor Nodes
4. The Non-Cross Layer Design Method
4.1. The Energy Efficient Routing Protocol
4.2. The Mobility
4.3. The Propagation Delay
4.4. Summary
5. The Cross-Layer Design Method
5.1. The Optimization-Based Method
5.1.1. Location Information-Free Routing Protocols
5.1.2. Location Information-Based Routing Protocols
5.1.3. Summary
5.2. Intelligent Algorithm-Based Methods
5.2.1. Fuzzy Logic-Based Routing Protocols
5.2.2. Simulated Annealing Based
5.2.3. Genetic Algorithm-Based Approaches
5.2.4. Particle Swarm Optimization-Based Methods
5.2.5. Neural Network-Based Methods
5.2.6. Reinforcement Learning-Based Methods
5.2.7. Ant Colony Optimization-Based Methods
5.2.8. Summary
6. Open Issues and Challenges
- The attenuation and absorption of acoustic wave in underwater environment is more serious than those of RF waves in terrestrial environments, which means that more transmission energy will be needed in an underwater environment, especially considering that the underwater sensor nodes are energy limited.
- The propagation delay, the bandwidth, the link quality, and the bit error rate in underwater acoustic channels are worse than those of terrestrial wireless channels.
- Due to the node movement and failure, the topology of underwater acoustic sensor networks changes frequently. Moreover, the architecture of underwater acoustic sensor networks is 3-dimensional, which is different from terrestrial wireless sensor networks.
- Since underwater GPS devices and underwater location algorithms are expensive and complex, the location information of the underwater sensor nodes is hard to get.
- The devices used in underwater acoustic sensor networks are much more complex and expensive than in terrestrial WSNs, because the devices used in underwater environments need to consider the waterproofness and the corrosion resistance under water.
- The propagation delay model. Due to the fact the propagation delay in underwater acoustic sensor networks is serious, how to calculate the propagation delay and build propagation models is still an unresolved issue.
- The energy consumption model. The energy in underwater sensor nodes is strictly limited, therefore how to reduce the energy consumption of underwater acoustic sensor networks is always the most important research area. However, there is currently no accurate and reliable energy consumption model for underwater sensor nodes and networks.
- The movement model. Due to the water currents, underwater sensor nodes move continuously. Even though there are already a lot of mobility models for terrestrial sensor nodes, the special network structure and hydromechanics make the movement of underwater sensor nodes totally different from that of terrestrial sensor nodes. An appropriate motion model is needed for underwater sensor networks.
- High efficiency and reliable communication. In underwater acoustic channels, the bandwidth, the link quality, and the bit error rate are all worse than those of terrestrial RF channels, so how to improve the efficiency and the reliability of underwater communication channels also deserves to be investigated.
- The utilization of intelligent algorithms in the underwater environment. This is a new research area for underwater acoustic sensor work. Since there are only a few intelligent algorithms that have been used in UASN routing protocols, therefore, how to use the intelligent algorithms to solve the issues that exist in underwater acoustic sensor networks has been a hot open issue in recent years.
- The location information acquisition. In underwater acoustic sensor networks, the location information is useful in routing discovery, however, the necessary GPS devices and location algorithms are expensive and complex. Therefore, how to get the location information of underwater sensor nodes easily and effectively is an important open issue.
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Protocol | Year | Underwater or Terrestrial | Hop-by-Hop or End-to-End | Requirements or Assumptions | Cluster or Single Entity | Hello or Control Message | Advantages | |||
|---|---|---|---|---|---|---|---|---|---|---|
| Non-Cross-Layer design protocol | Energy Efficient | DBR | 2008 | Underwater | Hop-by-Hop | depth information | single entity | Yes | Use the depth information instead of the location information; reduce the redundant packets transmission, energy consumption, and collision. | |
| DDD | 2007 | Underwater | single hop | AUVs needed | n/a | Yes | The communication only occurs in one-hop range, which minimal the energy consumption for the whole network. | |||
| EUROP | 2008 | Underwater | hop-by-hop | depth information | single entity | Yes | Reduce the energy consumption and minimize the effect of extreme long propagation delay. | |||
| HH-VBF | 2007 | Underwater | hop-by-hop | location information | single entity | No | Improving the robustness of packet delivery in sparse networks and enhancing the data delivery ration while taxing less energy than VBF. | |||
| NIR | 2010 | Underwater | hop-by-hop | location information | single entity | Yes | Low level energy consumption and high probability of packet delivery. | |||
| Mobicast | 2013 | Underwater | hop-by-hop | AUVs needed | clustered | No | Improving the successful delivery rate, reducing the power consumption and message overhead. | |||
| DBMR | 2010 | Underwater | end-to-end | depth information | single entity | Yes | Using the multi-hop transmission model to replace the flooding model, which can make the DBMR is much more energy efficient than DBR. | |||
| EERS | 2008 | Underwater | hop-by-hop | geographic information | single entity | Yes | High energy efficiency which close to the optimal energy performance, good trade-off between the throughput and delay. | |||
| AURP | 2012 | Underwater | hop-by-hop | AUVs needed | single entity | Yes | The total data transmissions are minimized and the short range high data rate achieve by AUVs, high delivery ratio and low energy consumption. | |||
| Mobility | HydroCast | 2010 | Underwater | hop-by-hop | pressure information | single entity | Yes | Maximizes greedy progress and limiting co-channel interference. | ||
| DFR | 2008 | Underwater | hop-by-hop | location information | single entity | No | Increasing the probability of successful delivery and delivery ratio, addressing the void problem. | |||
| VBF | 2006 | Underwater | end-to-end | location information | single entity | No | Scalable, robustness, and energy efficient for the highly dynamic network. | |||
| TCBR | 2010 | Underwater | hop-by-hop | special mechanical module | clustered | Yes | Increasing the reliability, reducing the energy consumption, and manage the problems of node mobility. | |||
| REBAR | 2008 | Underwater | hop-by-hop | location information | single entity | No | Increasing the delivery ratio and reducing the energy consumption of the nodes near the sink node. | |||
| VAPR | 2013 | Underwater | hop-by-hop | depth information | single entity | Yes | Robustness to dynamic topology, can avoid the void in routing discovery. | |||
| Time delay | UW-HSN | 2008 | Underwater | hop-by-hop | special mechanical module | single entity | Yes | Increase overall network capacity, lower the delays. | ||
| H2-DAB | 2009 | Underwater | hop-by-hop | n/a | single entity | Yes | Minimize the message latency; reduce the energy consumption without any extra or specialized network equipment. | |||
| ICRP | 2007 | Underwater | end-to-end | n/a | single entity | No | Combine the routing discovery and the data transmission together; improve the energy efficient, scalable, and the reliability of the data paths. | |||
| DUCS | 2007 | Underwater | hop-by-hop | n/a | clustered | Yes | Minimizes the proactive routing exchange, can adapt the node mobility, reduce the interference and improve the communication quality. | |||
| MPR | 2010 | Underwater | hop-by-hop | n/a | single entity | Yes | Low propagation delay, adaptive to the node mobility, can achieve load balance. | |||
| Cross-Layer design protocol | Traditional cross-layer design routing protocol | Location information free | CARP | 2014 | Underwater | hop-by-hop | history of the successful transmission | single entity | Yes | Use the history of the successful transmission to select the next hop, improving the robustness and deliver ratio, reducing the energy consumption. |
| UMIMO | 2012 | Underwater | hop-by-hop | special mechanical module | single entity | Yes | Leverage the tradeoff between multiplexing and diversity gain, select suitable subcarriers to avoid interference. | |||
| E-PULRP | 2010 | Underwater | hop-by-hop | pre-defined layer | clustered | Yes | Reducing the energy consumption, can adaptive the mobility of the network, prolong the network lifetime. | |||
| ERP2R | 2011 | Underwater | hop-by-hop | n/a | single entity | Yes | Balance the energy consumption, prolong the network lifetime, and reduce the end-to-end delay and energy consumption. | |||
| APCR | 2012 | Underwater | hop-by-hop | n/a | clustered | Yes | Achieve high delivery ratio and low energy consumption, reducing the delay in both sparse and dense networks. | |||
| EEIA | 2014 | Underwater | hop-by-hop | n/a | single entity | Yes | Propose a set of routing protocol which can reduce the energy consumption and the interference. | |||
| EEDBR | 2011 | Underwater | hop-by-hop | depth information | single entity | Yes | Set different holding time according the residual energy, reduce the energy consumption and prolong the network lifetime. | |||
| TBRD | 2011 | Underwater | end-to-end | special mechanical module | clustered | Yes | Reducing the energy consumption, the end-to-end delay, and the probability of the packet dropping. | |||
| EADA-RAT | 2008 | Underwater | end-to-end | sensor ID | single entity | Yes | Energy saving by minimizing the number of data transmissions, decreases the delay by automatic movement of the aggregation point, and extends the network lifetime. | |||
| Location information needed | AHH-VBF | 2014 | Underwater | hop-by-hop | location information | single entity | No | Improving the data delivery ration, energy consumption, and end-to-end latency compared to the HH-VBF. | ||
| FBR | 2008 | Underwater | hop-by-hop | location information | single entity | Yes | Reduce the energy per bit consumption and average packet end-to-end delay. | |||
| SEANAR | 2010 | Underwater | hop-by-hop | location information | single entity | Yes | Assign bigger weight to node with high connectivity to the sink, which increase the packet delivery ratio, and keep the energy consumption in a low level. | |||
| DIDS | 2006 | Underwater | hop-by-hop | location information | single entity | Yes | Minimizing the energy consumption, consider the underwater channel and the application requirement. | |||
| ARDDT | 2008 | Underwater | hop-by-hop | location information | single entity | Yes | Satisfy different application requirement, achieve a good trade-off among delivery ratio, average end-to-end delay, and energy consumption. | |||
| Intelligent algorithm based routing protocol | FL | PER | 2011 | Underwater | hop-by-hop | n/a | single entity | Yes | Can achieve excellent performance in terms of the metrics, the packet delivery ratio, energy consumption and average end-to-end delay. | |
| CBRA | 2014 | Underwater | single hop | location information | clustered | Yes | Reducing the energy consumption and prolong the network lifetime by using the fuzzy logic system. | |||
| DREE | 2015 | Underwater | hop-by-hop | n/a | single entity | Yes | The protocol outperforms network lifetime, energy consumption, and data delivery ration by utilizing the fuzzy logic based link estimator. | |||
| GBFO | 2015 | Underwater | hop-by-hop | n/a | clustered | No | Reducing the energy consumption and end-to-end delay, prolong the network lifetime. | |||
| FBCA | 2014 | Underwater | single hop | location information | clustered | Yes | High throughput, delivery ratio; low delay and energy consumption. | |||
| SA | LEACH-C | 2002 | Terrestrial | single hop | location information | clustered | Yes | Self-organization, save communication resources, improves the system lifetime. | ||
| EELEACH-C | 2012 | Terrestrial | single hop | n/a | clustered | Yes | Minish the total energy consumption, prolong the network lifetime. | |||
| EERS | 2012 | Terrestrial | single hop | location information | clustered | Yes | Global optimization, cost effective, improve the routing success ratio and reduce the routing cost. | |||
| LER | 2012 | Terrestrial | end-to-end | n/a | single entity | No | Can deal with the mobility of the sink, higher efficiency in terms of the packet transmission distance, the hop counts, and the energy consumption. | |||
| ILEACH | 2013 | Terrestrial | single hop | location information | clustered | Yes | The performance of the energy consumption and network lifetime has been improved by introducing the VCH to the algorithm, which can reduce the frequency re-clustering. | |||
| GA | GAOUP | 2011 | Terrestrial | end-to-end | location information | single entity | Yes | Development time is much shorter than the traditional approaches; the systems are robust and insensitive to noisy and missing data. | ||
| ERP | 2012 | Terrestrial | single hop | n/a | clustered | No | New fitness function is proposed, prolong the network lifetime and stability period, and reduce the energy consumption. | |||
| ORGA | 2012 | Terrestrial | end-to-end | n/a | single entity | No | Solving the shortest path problem by using GA algorithm, and performs better and effectively when the node mobility or the topology changes. | |||
| FMQM | 2011 | Terrestrial | end-to-end | n/a | single entity | No | Decrease the search space, simplify the process of coding and decoding, reduces the energy consumption. | |||
| PSO | TPSO-CR | 2015 | Terrestrial | single hop | n/a | clustered | Yes | Improve the packet delivery rate at both the cluster heads and the base station, increase network coverage and maintain acceptable energy consumption at the same time. | ||
| PSOR | 2012 | Terrestrial | end-to-end | n/a | single entity | No | Energy efficiency and the path to the destination node are optimized. | |||
| PSO-GA | 2014 | Terrestrial | end-to-end | n/a | single entity | No | Higher precision and lower computational complexity, the performance is better than PSO and GA. | |||
| EECR | 2014 | Terrestrial | single hop | n/a | clustered | Yes | The network lifetime, the number of inactive sensor nodes, and the total data packets transmission are better than the existing algorithms. | |||
| ECPSOA | 2015 | Terrestrial | end-to-end | location information | single entity | Yes | Reduce the communication overhead in terms of both energy and delay, and the network robustness against path breakage due to multiple sinks movement or nodes failure is also improved. | |||
| RL | QELAR | 2010 | Terrestrial | hop-by-hop | n/a | single entity | Yes | Learn the environment effectively to better adapt the dynamic networks, reduce networking overhead for higher energy efficiency, and make the energy consumption more evenly. | ||
| FQR | 2012 | Terrestrial | hop-by-hop | location information | single entity | Yes | Increase the application level throughput and the link failure resiliency, and balance the energy consumption. | |||
| EIER | 2015 | Terrestrial | hop-by-hop | n/a | clustered | Yes | Increase the network lifetime, the packet delivery ratio, and the network balance; reduce the packet delay. | |||
| RECC | 2013 | Terrestrial | hop-by-hop | n/a | single entity | No | Efficient in terms of percentage of lost packets, network energy consumption, maximal energy consumption per node, and network lifetime. | |||
| EQR-RL | 2014 | Terrestrial | hop-by-hop | n/a | single entity | Yes | Enhance the performance of the network lifetime, the end-to-end delay, and the packet delivery ration. | |||
| DTRB | 2013 | Terrestrial | hop-by-hop | n/a | single entity | Yes | Deliver more messages than a traditional delay tolerant one in densely populated areas. | |||
| NN | SIR | 2006 | Terrestrial | end-to-end | n/a | clustered | No | Can achieve superior performance in terms of average latency and energy consumption over the traditional routing, and prolong the network lifetime. | ||
| NNBH | 2012 | Terrestrial | hop-by-hop | n/a | single entity | Yes | Scalable and adapt for dynamic network topology and real network environment. | |||
| TCNN | 2012 | Terrestrial | end-to-end | n/a | single entity | Yes | The disjoint path set reliability is much higher than the shortest one, the reliability and the number of paths are improve, and the number of paths in the path the set is also improved. | |||
| ACO | LEACH-P | 2012 | Terrestrial | end-to-end | n/a | clustered | Yes | Prolong the network lifetime, balance the energy consumption. | ||
| ACOA-AFSA | 2012 | Underwater | end-to-end | n/a | single entity | No | Have better performance on energy consumption, packet loss rate, and time delay than VBF and LEACH. | |||
| EAAR | 2010 | Terrestrial | end-to-end | n/a | single entity | Yes | Reducing the energy consumption of the nodes and prolong the network lifetime. | |||
| FACOR | 2014 | Terrestrial | end-to-end | n/a | single entity | Yes | Increasing the network lifetime, reducing the energy consumption, and increasing the packet delivery ratio. | |||
| AOCR | 2013 | Terrestrial | end-to-end | n/a | clustered | Yes | Achieve better results in terms of packets delivery time and residual network energy. | |||
References
- Benson, B.; Li, Y.; Kastner, R.; Faunce, B.; Domond, K.; Kimball, D.; Schurgers, C. Design of a Low-Cost Underwater Acoustic Modem for Short-Range Sensor Networking Applications. In Proceeding of the 2010 IEEE OCEANS, Sydney, NSW, Australia, 24 May 2010; pp. 1–9.
- Heidemann, J.; Stojanovic, M.; Zorzi, M. Underwater sensor networks: Applications, advances and challenges. Philos. Trans. R. Soc. 2012, 370, 158–175. [Google Scholar] [CrossRef] [PubMed]
- Ayaz, M.; Baig, I.; Abdullah, A.; Faye, I. A survey on routing techniques in underwater wireless sensor networks. J. Netw. Comput. Appl. 2011, 34, 1908–1927. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. State-of-the-Art in Protocol Research for Underwater Acoustic Sensor Networks. In Proceeding of the 1st ACM International Workshop on Underwater Networks, Los Angeles, CA, USA, 25 September 2006; pp. 7–16.
- Climent, S.; Sanchez, A.; Capella, J.V.; Meratnia, N.; Serrano, J.J. Underwater Acoustic Wireless Sensor Networks: Advances and Future Trends in Physical, MAC and Routing Layers. Sensors 2014, 14, 795–833. [Google Scholar] [CrossRef] [PubMed]
- Tanebbaum, A.S. Computer Networks, 5th ed.; Prentice Hall: Boston, MA, USA, 2011. [Google Scholar]
- Wu, J. Handbook on Theoretical and Algorithmic Aspects of Sensor, Ad Hoc Wireless, and Peer-to-Peer Networks; The Chemical Rubber Company Press: Boca Raton, FL, USA, 2005; pp. 1–17. [Google Scholar]
- Lu, X.L. The Research on Ad Hoc Network Cross-Layer Design. Ph.D. Thesis, Nanjing University of Science and Technology, Nanjing, China, 2008. [Google Scholar]
- Chiang, M.; Low, S.H.; Calderbank, R.A.; Doyle, J.C. Layering as Optimization Decomposition: A Mathematical Theory of Network Architectures. Proc. IEEE 2007, 95, 255–312. [Google Scholar] [CrossRef]
- Elbatt, T.; Ephremides, A. Joint Scheduling and Power Control for Wireless Ad-Hoc Networks. IEEE Trans. Wirel. Commun. 2004, 3, 74–85. [Google Scholar] [CrossRef]
- Radunovic, B.; Boudec, J.Y.L. Joint scheduling, power control and routing in symmetric, one dimensional, multi-hop wireless networks. In Proceedings of the Modeling and Optimization in Mobile, Ad-Hoc and Wireless Networks, Sophia-Antipolis, France, 3–5 March 2003; pp. 1–11.
- Tsatsanis, M.K.; Zhang, R.; Banerjee, S. Network assisted diversity for random access wireless networks. IEEE Trans. Signal Process. 2000, 48, 702–711. [Google Scholar] [CrossRef]
- So, J.; Vaidya, N. Multi-channel MAC for Ad-Hoc networks: Handling multi-channel hidden terminals using a single transceiver. In Proceeding of the 5th ACM International Symposium on Mobile Ad-Hoc Networking and Computing, Tokyo, Japan, 24–26 May 2004; pp. 222–233.
- Cao, M.; Raghunathan, V.; Kumar, P.R. Cross-Layer Exploitation of MAC Layer Diversity in Wireless Networks. In Proceedings of the 14th IEEE International Conference on Network Protocols, Santa Barbara, CA, USA, 12–15 November 2006; pp. 332–341.
- Xu, Y.; Heidemann, J.; Estrin, D. Adaptive Energy Conserving Routing for Multihop Ad Hoc Networks; Research Report 527; USC/Information Sciences Institute: Marina del Rey, CA, USA, 2000. [Google Scholar]
- Setton, E.; Yoo, T.; Zhu, X.Q. Cross-Layer Design of Ad-Hoc Networks for Real time Video Streaming. IEEE Wirel. Commun. 2005, 12, 59–65. [Google Scholar] [CrossRef]
- Metropolis, N.; Rosenbluth, A.W.; Rosenbluth, M.N.; Teller, A.H.; Teller, E. Equation of State Calculations by Fast Computing Machines. J. Chem. Phys. 1953, 21, 1087–1092. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; MIT Press: Cambridge, MA, USA, 1975. [Google Scholar]
- Dorigo, M.; Gambardella, L.M. Ant colony system: A cooperative learning approach to the traveling salesman problem. IEEE Trans. Evolut. Comput. 1997, 1, 53–66. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, WA, USA, 27 November–1 December 1995; pp. 1942–1948.
- Kaelbling, L.P.; Littman, M.L.; Moore, A.W. Reinforcement Learning: A Survey. J. Artif. Intell. Res. 1996, 4, 237–285. [Google Scholar]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction; The MIT Press: London, UK, 1998. [Google Scholar]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- McCulloch, W.S.; Pitts, W. A logical calculus of the ideas immanent in nervous activity. Bull. Math. Biophys. 1943, 5, 115–133. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by Simulated Annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Chen, K.Y.; Ma, M.D.; Cheng, E.; Yuan, F.; Su, W. A Survey on MAC Protocols for Underwater Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2014, 16, 1433–1447. [Google Scholar] [CrossRef]
- Kredo, K.B., II; Mohapatra, P. A Hybrid Medium Access Control Protocol for Underwater Wireless Networks. In Proceedings of the Thirteenth Annual International Conference on Mobile Computing and Networking, Montreal, QC, Canada, 9–14 September 2007; pp. 1–8.
- Casari, P.; Zorzi, M. Protocol Design Issues in Underwater Acoustic Networks. Comput. Commun. 2011, 34, 2013–2025. [Google Scholar] [CrossRef]
- Wang, Q.; Hempstead, M.; Yang, W. A Realistic Power Consumption Model for Wireless Sensor Network Devices. In Proceedings of the 3rd Annual IEEE Communications Society on Sensor and Ad-Hoc Communications and Networks, Reston, VA, USA, 28 September 2006; pp. 286–295.
- Dunkels, A.; Osterlind, F.; Tsifites, N.; He, Z. Software-Based On-Line Energy Estimation for Sensor Nodes. In Proceedings of the 4th Workshop on Embedded Networked Sensors, Cork, Ireland, 25–26 June 2007; pp. 28–32.
- Kellner, S.; Pink, M.; Meier, D.; Blass, E. Towards a Realistic Energy Model for Wireless Sensor Networks. In Proceedings of the 5th Annual Conference on Wireless on Demand Networks Systems and Services, Garmisch-Partenkirchen, Germany, 23–25 January 2008; pp. 97–100.
- Wang, Q.; Yang, W. Energy Consumption Model for Power Management in Wireless Sensor Networks. In Proceedings of the 4th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad-Hoc Communications and Networks, San Diego, CA, USA, 18–21 June 2007; pp. 142–151.
- Shareef, A.; Zhu, Y. Energy Modeling of Wireless Sensor Nodes Based on Petri Nets. In Proceedings of the 39th International Conference on Parallel Processing, San Diego, CA, USA, 13–16 September 2010; pp. 101–110.
- Zhou, H.; Luo, D.; Gao, Y.; Zuo, D. Modeling of Node Energy Consumption for Wireless Sensor Networks. Wirel. Sens. Netw. 2011, 3, 18–23. [Google Scholar] [CrossRef]
- Domingo, M.C.; Prior, R. Energy analysis of routing protocols for underwater wireless sensor networks. Comput. Commun. 2008, 31, 1227–1238. [Google Scholar] [CrossRef]
- Bettstetter, C. Mobility Modeling, Connectivity, and Adaptive Clustering in Ad-Hoc Networks. Ph.D. Thesis, Technical University of Munich, Munich, Germany, 2004. [Google Scholar]
- Zhou, Z.; Peng, Z.; Cui, J.H.; Shi, Z.J. Scalable Localization with Mobility Prediction for Underwater Sensor Networks. IEEE Trans. Mob. Comput. 2010, 10, 335–348. [Google Scholar] [CrossRef]
- Erol, M.; Vieira, L.F.M.; Gerla, M. Localization with Dive’N’Rise (DNR) beacons for underwater acoustic sensor networks. In Proceeding of the Second Workshop on Underwater Networks, Montreal, QC, Canada, 9–14 September 2007; pp. 97–100.
- Caruso, A.; Paparella, F.; Vieira, L.F.M.; Erol, M. The Meandering Current Mobility Model and its Impact on Underwater Mobile Sensor Networks. In Proceeding of the 27th IEEE Conference on Computer Communications, Phoenix, AZ, USA, 13–18 April 2008; pp. 771–779.
- Yan, H.; Shi, Z.J.; Cui, J.H. DBR: Depth-Based Routing for Underwater Sensor Networks. In NETWORKING 2008 Ad Hoc and Sensor Networks, Wireless Networks, Next Generation Internet; Springer Berlin Heidelberg: Berlin, Germany, 2008; Volume 4982, pp. 72–86. [Google Scholar]
- Magistretti, E.; Kong, J.J.; Lee, U.; Gerla, M.; Bellavista, P.; Corradi, A. A Mobile Delay-Tolerant Approach to Long-Term Energy-Efficient Underwater Sensor Networking. In Proceeding of the IEEE Wireless Communications and Networking Conference, Hong Kong, China, 11–15 March 2007; pp. 2866–2871.
- Yang, C.H.; Ssu, K.F. An energy-efficient routing protocol in underwater sensor networks. In Proceeding of the 3rd International Conference on Sending Technology, Tainan, Taiwan, 30 November–3 December 2008; pp. 114–118.
- Jiang, Y.F.; Lin, S. NIR: UWSN Routing Protocol Based on Node Neighbor Information. In Proceeding of the International Conference on Future Information Technology and Management Engineering, Changzhou, China, 9–10 October 2010; pp. 219–222.
- Chen, Y.S.; Lin, Y.W. Mobicast Routing Protocol for Underwater Sensor Networks. IEEE Sens. J. 2012, 13, 737–749. [Google Scholar]
- Liu, G.Z.; Li, Z.B. Depth-Based Multi-Hop Routing Protocol for Underwater Sensor Network. In Proceeding of the 2nd International Conference on Industrial Mechatronics and Automation, Wuhan, China, 30–31 May 2010; Volume 2, pp. 268–270.
- Zorzi, M.; Casari, P.; Baldo, N.; Harris, A.F. Energy-Efficient Routing Schemes for Underwater Acoustic Networks. IEEE Sel. Areas Commun. 2008, 26, 1754–1766. [Google Scholar] [CrossRef]
- Yoon, S.; Azad, A.K.; Hoon, O.; Kim, S.H. AURP: An AUV-Aided Underwater Routing Protocol for Underwater Acoustic Sensor Networks. Sensors 2012, 12, 1827–1845. [Google Scholar] [CrossRef] [PubMed]
- Ayaz, M.; Abdullah, A.; Jung, L.T. Temporary cluster based routing for Underwater Wireless Sensor Networks. In Proceedings of the International Symposium in Information Technology, Kuala Lumpur, Malaysia, 15–17 June 2010; pp. 1009–1014.
- Domingo, M.C.; Prior, R. A Distributed Clustering Scheme for Underwater Wireless Sensor Networks. In Proceedings of the 18th International Personal, Indoor and Mobile Radio Communications, Athens, Greece, 3–7 September 2007; pp. 1–5.
- Lee, U.; Wang, P.; Noh, Y.; Vieira, F.L.M. Pressure Routing for Underwater Sensor Networks. In Proceedings of the 2010 IEEE INFOCOM, San Diego, CA, USA, 14–19 March 2010; pp. 1–9.
- Hwang, D.; Kim, D. DFR: Directional flooding-based routing protocol for underwater sensor networks. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–7.
- Xie, P.; Cui, J.H.; Li, L. VBF: Vector-Based Forwarding Protocol for Underwater Sensor Networks. In Proceedings of the 5th International IFIP-TC6 Networking Conference, Coimbra, Portugal, 15–19 May 2006; pp. 1216–1221.
- Nicolaou, N.; See, A.; Xie, P.; Cui, J.H. Improving the Robustness of Location-Based Routing for Underwater Sensor Networks. In Proceeding of the IEEE OCEANS Europe Conference, Aberdeen, UK, 18–22 June 2007; pp. 1–6.
- Chen, J.M.; Wu, X.B.; Chen, G.H. REBAR: A Reliable and Energy Balanced Routing for UWSNs. In Proceedings of the 7th International Conference on Grid and Cooperative Computing, Shenzhen, China, 24–26 October 2008; pp. 349–355.
- Youngtae, N.; Uichin, L.; Paul, W.; Choi, B.S.C. VARP: Void-Aware Pressure Routing for Underwater Sensor Networks. IEEE Trans. Mob. Comput. 2012, 12, 895–908. [Google Scholar]
- Ali, K.; Hassanein, H. Underwater Wireless Hybrid Sensor Networks. In Proceedings of IEEE Symposium on Computers and Communications, Marrakech, Morocco, 6–9 July 2008; pp. 1166–1171.
- Ayaz, M.; Abdullah, A. Hop-by-Hop Dynamic Addressing Based (H2-DAB) Routing Protocol for Underwater Wireless Sensor Networks. In Proceedings of the International Conference on Information and Multimedia Technology, Jeju Island, Korea, 16–18 December 2009; pp. 436–441.
- Liang, W.; Yu, H.B.; Liu, L.; Li, B.X. Information-Carrying Based Routing Protocol for Underwater Acoustic Sensor Networks. In Proceedings of the International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; pp. 729–734.
- Chen, Y.S.; Juang, T.Y.; Lin, Y.W.; Tsai, I.C. A Low Propagation Delay Multi-Path Protocol for Underwater Sensor Networks. J. Internet Technol. 2010, 11, 153–166. [Google Scholar]
- Basagni, S.; Petrioli, C.; Petroccia, R.; Spaccini, D. Channel-aware routing for underwater wireless networks. In Proceedings of the OCEANS, Yeosu, Korea, 21–24 May 2012; pp. 1–9.
- Kuo, L.C.; Melodia, T. Cross-Layer routing on MIMO-OFDM underwater acoustic links. In Proceedings of the 9th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad-Hoc Communications and Networks, Seoul, Korea, 18–21 June 2012; pp. 227–235.
- Gopi, S.; Kannan, G.; Desai, U.B.; Merchant, S.N. Energy Optimized Path Unaware Layered Routing Protocol for Underwater Sensor Networks. In Proceedings of the IEEE Global Telecommunications Conference, New Orleans, LA, USA, 30 November–4 December 2008; pp. 1–6.
- Wahid, A.; Lee, S.; Kim, D. An energy-efficient routing protocol for UWSNs using physical distance and residual energy. In Proceedings of the OCEANS, Santander, Spain, 6–9 June 2011; pp. 1–6.
- Shasshaj, A.; Petroccia, R.; Petrioli, C. Energy efficient interference-aware routing and scheduling in underwater sensor networks. In Proceedings of the OCEANS, St. John’s, NL, Canada, 14–19 September 2014; pp. 1–8.
- Bzoor, M.A.; Zhu, Y.B.; Liu, J.; Reda, A.; Cui, J.H.; Rajasekaran, S. Adaptive Power Controlled Routing for Underwater Sensor Networks. Wirel. Algorithms Syst. Appl. 2012, 7405, 549–560. [Google Scholar] [CrossRef]
- Wahid, A.; Lee, S.; Jeong, H.J.; Kim, D. EEDBR: Energy-Efficient Depth-Based Routing for Underwater Wireless Sensor Networks. Adv. Comput. Sci. Inf. Technol. 2011, 195, 223–234. [Google Scholar]
- Kuo, L.C.; Melodia, T. Tier-Based Underwater Acoustic Routing for Applications with Reliability and Delay Constraints. In Proceedings of the IEEE International Workshop on Wireless Mesh and Ad-Hoc Networks, Maui, HI, USA, 31 July–4 August 2011; pp. 1–6.
- Nam, H.; An, S. Energy-Efficient Routing Protocol in Underwater Acoustic Sensor Networks. In Proceedings of the IEEE/IFIP International Conference on Embedded and Ubiquitous Computing, Shanghai, China, 17–20 December 2008; pp. 663–669.
- Yu, H.; Yao, N.; Liu, J. An adaptive routing protocol in underwater sparse acoustic sensor networks. Ad Hoc Netw. 2015, 34, 121–143. [Google Scholar] [CrossRef]
- Jornet, J.M.; Stojanovic, M.; Zorzi, M. Focused beam routing protocol for underwater networks. In Proceedings of the Third ACM International workshop on Underwater Networks, San Francisco, CA, USA, 14–19 September 2008; pp. 75–82.
- Wu, X.; Chen, G.; Chen, J. Energy-Efficient and Topology-Aware Routing for Underwater Sensor Networks. In Proceedings of the 19th International Conference on Computer Communications and Networks, Zurich, Switzerland, 2–5 August 2010; pp. 1–6.
- Pompili, D.; Melodia, T.; Akyildiz, I.F. Routing algorithm for delay-insensitive and delay-sensitive applications in underwater sensor networks. In Proceedings of the 12th Annual International Conference on Mobile Computing and Networking, Los Angeles, CA, USA, 23–29 September 2006; pp. 298–309.
- Guo, Z.; Colombo, G.; Wang, B.; Cui, J.H. Adaptive Routing in Underwater Delay/Disruption Tolerant Sensor Networks. In Proceedings of the Fifth Annual Conference on Wireless on Demand Network Systems and Services, Garmisch-Partenkirchen, Germany, 23–25 January 2008; pp. 31–39.
- Huang, C.J.; Wang, Y.W.; Liao, H.H.; Lin, C.F.; Hu, K.W.; Chang, T.Y. A power-efficient routing protocol for underwater wireless sensor networks. Appl. Soft Comput. 2011, 22, 2348–2355. [Google Scholar] [CrossRef]
- Banerjee, R.; Bhattacharyya, C.K. Cluster based routing algorithm with evenly load distribution for large scale networks. In Proceedings of the International Conference on Computer Communication and Informatics, Coimbatore, India, 3–5 January 2014; pp. 1–6.
- Tariq, M.; Latiff, M.S.; Ayaz, M.; Coulibaly, Y.; Al-Areqi, N. Distance based Reliable and Energy Efficient (DREE) Routing for Underwater Acoustic Sensor Networks. J. Netw. 2015, 30, 311–321. [Google Scholar] [CrossRef]
- Reza, M.M.; Rahman, K.T.; Zakaria, A.S.M. Grid based Fuzzy Optimized Routing Protocol for Underwater Sensor Networks. Int. J. Comput. Appl. 2015, 112, 23–26. [Google Scholar]
- Goyal, N.; Dave, M.; Verma, A.K. Fuzzy based clustering and aggregation technique for underwater wireless sensor networks. In Proceedings of the International Conference on Electronics and Communication Systems, Coimbatore, India, 13–14 February 2014; pp. 1–5.
- Heinzelman, W.B.; Chandrakasan, A.P.; Balakrishnan, H. An application-specific protocol architecture for wireless microsensor networks. IEEE Trans. Wirel. Commun. 2002, 1, 660–670. [Google Scholar] [CrossRef]
- Shi, S.; Liu, X.; Gu, X. An energy-efficiency Optimized LEACH-C for wireless sensor networks. In Proceedings of the 7th International ICST Conference on Communications and Networking in China, Kunming, China, 8–10 August 2012; pp. 487–492.
- Kaura, R.; Majithia, S. Efficient End to End Routing using RSSI and Simulated Annealing. Int. J. Eng. Res. Technol. 2012, 1, 1–5. [Google Scholar]
- Zhao, F.; Xu, Y.; Li, R. Improved LEACH Routing Communication Protocol for a Wireless Sensor Network. Int. J. Distrib. Sens. Netw. 2012, 2012, 1–6. [Google Scholar] [CrossRef]
- Han, S.W.; Jeong, I.S.; Kang, S.H. Low Latency and energy efficient routing tree for wireless sensor networks with multiple mobile sinks. J. Netw. Comput. Appl. 2013, 36, 156–166. [Google Scholar] [CrossRef]
- Chakraborty, A.; Mitra, S.K.; Naskar, M.K. A Genetic Algorithm inspired Routing Protocol for Wireless Sensor Networks. Int. J. Comput. Intell. Theory Pract. 2011, 6, 1–8. [Google Scholar]
- Attea, B.A.; Khalil, E.A. A new evolutionary based routing protocol for clustered heterogeneous wireless sensor networks. Appl. Soft Comput. 2012, 12, 1950–1957. [Google Scholar] [CrossRef]
- Mohammed, A.A.; Nagib, G. Optimal Routing In Ad-Hoc Networking Using Genetic Algorithm. Int. J. Adv. Netw. Appl. 2012, 3, 1323–1328. [Google Scholar]
- Yen, Y.S.; Chao, H.C.; Chang, R.S.; Vasilakos, A. Flooding-Limited and multi-constrained QoS multicast routing based on the genetic algorithm for MANETs. Math. Comput. Model. 2011, 53, 2238–2250. [Google Scholar] [CrossRef]
- Elhabyan, R.S.Y.; Yagoub, M.C.E. Two-tier particle swarm optimization protocol for clustering and routing in wireless sensor network. J. Netw. Comput. Appl. 2015, 52, 116–128. [Google Scholar] [CrossRef]
- Lakshmanan, L.; Tomar, D.C. Optimizing Localization Route Using Particle Swarm-A Genetic Approach. Am. J. Appl. Sci. 2014, 11, 520–527. [Google Scholar] [CrossRef]
- Kuila, P.; Jana, P.K. Energy efficient clustering and routing algorithms for wireless sensor networks: Particle swarm optimization approach. Eng. Appl. Artif. Intell. 2014, 33, 127–140. [Google Scholar] [CrossRef]
- Sarangi, S.; Thankchan, B. A Novel Routing Algorithm for Wireless Sensor Network Using Particle Swarm Optimization. Int. J. Res. Eng. Inf. Soc. Sci. 2012, 4, 26–30. [Google Scholar] [CrossRef]
- Hu, Y.F.; Ding, Y.S.; Ren, L.H.; Hao, K.R.; Han, H. An endocrine cooperative particle swarm optimization algorithm for routing recovery problem of wireless sensor networks with multiple mobile sinks. Inf. Sci. 2015, 300, 100–113. [Google Scholar] [CrossRef]
- Barbancho, J.; Leon, C.; Molina, J.; Barbancho, A. SIR: A New Wireless Sensor Network Routing Protocol Based on Artificial Intelligence. Adv. Web Netw. Technol. Appl. 2006, 3842, 271–275. [Google Scholar]
- Kojic, N.; Reljin, I.; Reljin, B. A Neural Network-Based Hybrid Routing Protocol for Wireless Mesh Networks. Sensors 2012, 12, 7548–7575. [Google Scholar] [CrossRef] [PubMed]
- Sheikhan, M.; Hemmati, E. Transient chaotic neural network-based disjoint multipath routing for mobile ad-hoc networks. Neural Comput. Appl. 2012, 21, 1403–1412. [Google Scholar] [CrossRef]
- Hu, T.; Fei, Y. QELAR: A Machine-Learning-Based Adaptive Routing Protocol for Energy-Efficient and Lifetime-Extended Underwater Sensor Networks. IEEE Trans. Mob. Comput. 2010, 9, 796–809. [Google Scholar]
- Kiani, F.; Amir, E.; Zamani, M.; Khodadadi, T.; Manaf, A.A. Efficient Intelligent Energy Routing Protocol in Wireless Sensor Networks. Int. J. Distrib. Sens. Netw. 2015, 2015, 1–13. [Google Scholar] [CrossRef]
- Oddi, G.; Macone, D.; Pietrabissa, A.; Liberati, F. A proactive link-failure resilient routing protocol for MANETs based on reinforcement learning. In Proceedings of the 20th Mediterranean Conference on Control and Automation, Barcelona, Spain, 3–6 July 2012; pp. 1259–1264.
- Maalej, M.; Cherif, S.; Basbes, H. QoS and Energy Aware Cooperative Routing Protocol for Wildfire Monitoring Wireless Sensor Networks. Sci. World J. 2013, 2013, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Rolla, V.G.; Curado, M. A reinforcement learning-based routing for delay tolerant networks. Eng. Appl. Artif. Intell. 2013, 26, 2243–2250. [Google Scholar] [CrossRef]
- Jafarzadeh, S.Z.; Moghaddam, M.H.Y. Design of energy-aware QoS routing algorithm in wireless sensor networks using reinforcement learning. In Proceedings of the 4th International Conference on Computer and Knowledge Engineering, Mashhad, Iran, 29–30 October 2014; pp. 722–727.
- Liao, M.H.; Zhang, H.; Sun, G. Energy Aware Routing Algorithm for Wireless Sensor Network Based on Ant Colony Principle. J. Converg. Inf. Technol. 2012, 7, 215–221. [Google Scholar]
- Wu, H.F.; Chen, X.Q.; Shi, C.J.; Xiao, Y.J.; Xu, M. An ACOA-AFSA Fusion Routing Algorithm For Underwater Wireless Sensor Network. Int. J. Distrib. Sens. Netw. 2012, 2012, 1–9. [Google Scholar] [CrossRef]
- Misra, S.; Dhurandher, S.K.; Obaidat, M.S.; Gupta, P.; Verma, K.; Narula, P. An ant swarm-inspired energy-aware routing protocol for wireless Ad-Hoc networks. J. Syst. Softw. 2010, 83, 2188–2199. [Google Scholar] [CrossRef]
- Amiri, E.; KEshavarz, H.; Alizadeh, M.; Zamani, M.; Khodadadi, T. Energy Efficient Routing in Wireless Sensor Networks Based on Fuzzy Ant Colony Optimization. Int. J. Distrib. Sens. Netw. 2014, 2014, 1–14. [Google Scholar] [CrossRef]
- Li, K.H.; Leu, J.S.; Hoek, J. Ant-Based On-Demand Clustering Routing Protocol for Mobile Ad-Hoc Networks. In Proceedings of the 7th International Innovative Mobile and Internet Services in Ubiquitous Computing, Taichung, Taiwan, 5–7 July 2013; pp. 354–359.






| Underwater Environment (Acoustic Wave) | Terrestrial Environment (RF Wave) | |
|---|---|---|
| Propagation speed | Low (1200 m/s to 1400 m/s) | High (3 × 108 m/s) |
| Energy consumption | High | Low |
| Propagation delay | High | Low |
| Bandwidth | Low | High |
| Data rate | Low | High |
| Noise and interference | High | Low |
| Dynamics | High | Low |
| Reliability | Low | High |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, N.; Martínez, J.-F.; Meneses Chaus, J.M.; Eckert, M. A Survey on Underwater Acoustic Sensor Network Routing Protocols. Sensors 2016, 16, 414. https://doi.org/10.3390/s16030414
Li N, Martínez J-F, Meneses Chaus JM, Eckert M. A Survey on Underwater Acoustic Sensor Network Routing Protocols. Sensors. 2016; 16(3):414. https://doi.org/10.3390/s16030414
Chicago/Turabian StyleLi, Ning, José-Fernán Martínez, Juan Manuel Meneses Chaus, and Martina Eckert. 2016. "A Survey on Underwater Acoustic Sensor Network Routing Protocols" Sensors 16, no. 3: 414. https://doi.org/10.3390/s16030414
APA StyleLi, N., Martínez, J. -F., Meneses Chaus, J. M., & Eckert, M. (2016). A Survey on Underwater Acoustic Sensor Network Routing Protocols. Sensors, 16(3), 414. https://doi.org/10.3390/s16030414