1. Introduction
A Hemispherical Resonance Gyroscope (HRG) is a Coriolis Vibrating Gyroscope (CVG), which measures the angle or angular velocity using the Coriolis force generated by the rotational motion [
1]. HRGs are suitable for miniaturization and high precision due to their simple structure made up of five components and easy production process. Particularly, since it is a sensor made of quartz material, which has excellent material properties, using the solid state wave phenomenon, it guarantees high reliability and a long-term lifespan. In addition, it has the advantage that it can be used in the angular velocity mode or the integral angular velocity mode according to the control technique and the electronic circuit used, without requiring any structural changes to the sensor [
1].
The development of HRG technology, which started in the 1970s, has been conducted actively in the advanced countries such as the United States (Northrop Grumman), France (SAGEM), Russia (RDC, Medicon),
etc. for the purpose of its use in the attitude controllers of satellites and spaceships, long-term navigation systems for strategic missiles, submarines,
etc., where long-term reliability is important [
2].
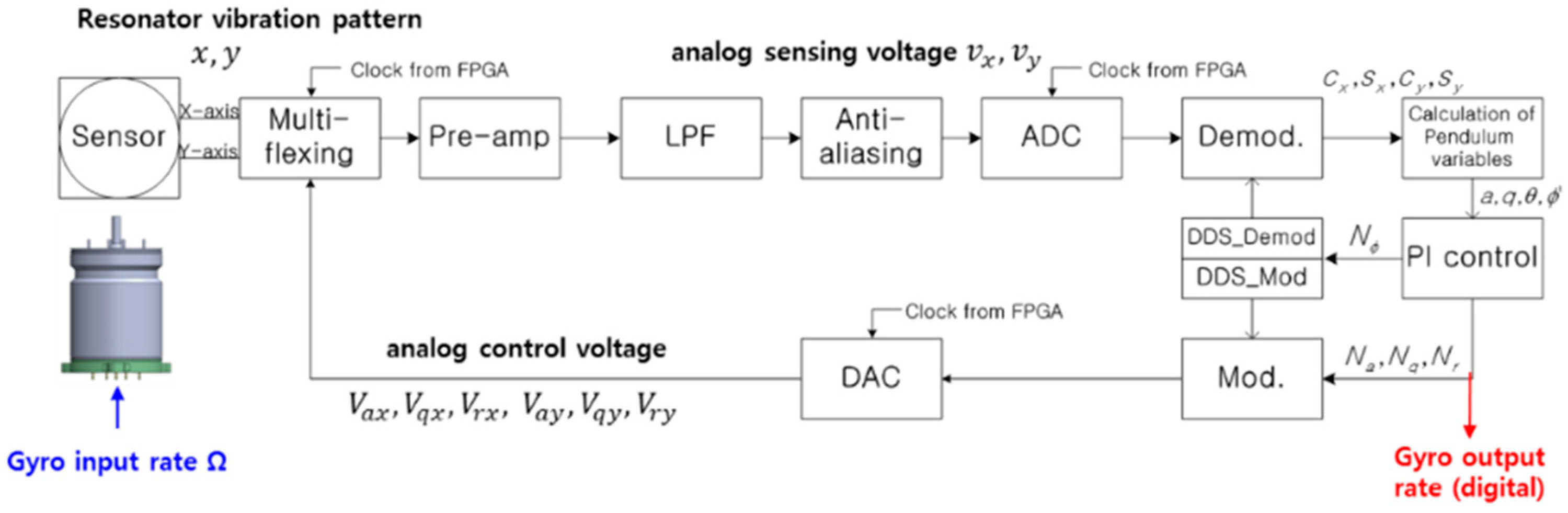
The United States (Northrop Grumman) is currently producing miniature HRGs, the size of golf balls, based on the existing HRG 130P from 2012. This is the results of design improvement that converts the 3-piece system, in which the forcer and pickoff are divided, into a 2-piece system, in which the outer forcer is removed, and the process stage is reduced using the multi-flexing method [
3]. The multi-flexing method involves obtaining the sensing and driving signal of the x-axis and y-axis using the same element by switching within the specified cycle and is suitable for high precision and low maneuverability systems like satellite systems. In addition, the SIGMA 20 navigation system, according to data made public by France in 2013, is under development based on the 2-piece HRG, which applies the multi-flexing technique to a resonator of 20 mm diameter, showing that it can be utilized in ground navigation systems used in rough environments focusing on the characteristics of the HRG, which can endure thermal and mechanical stress [
4].
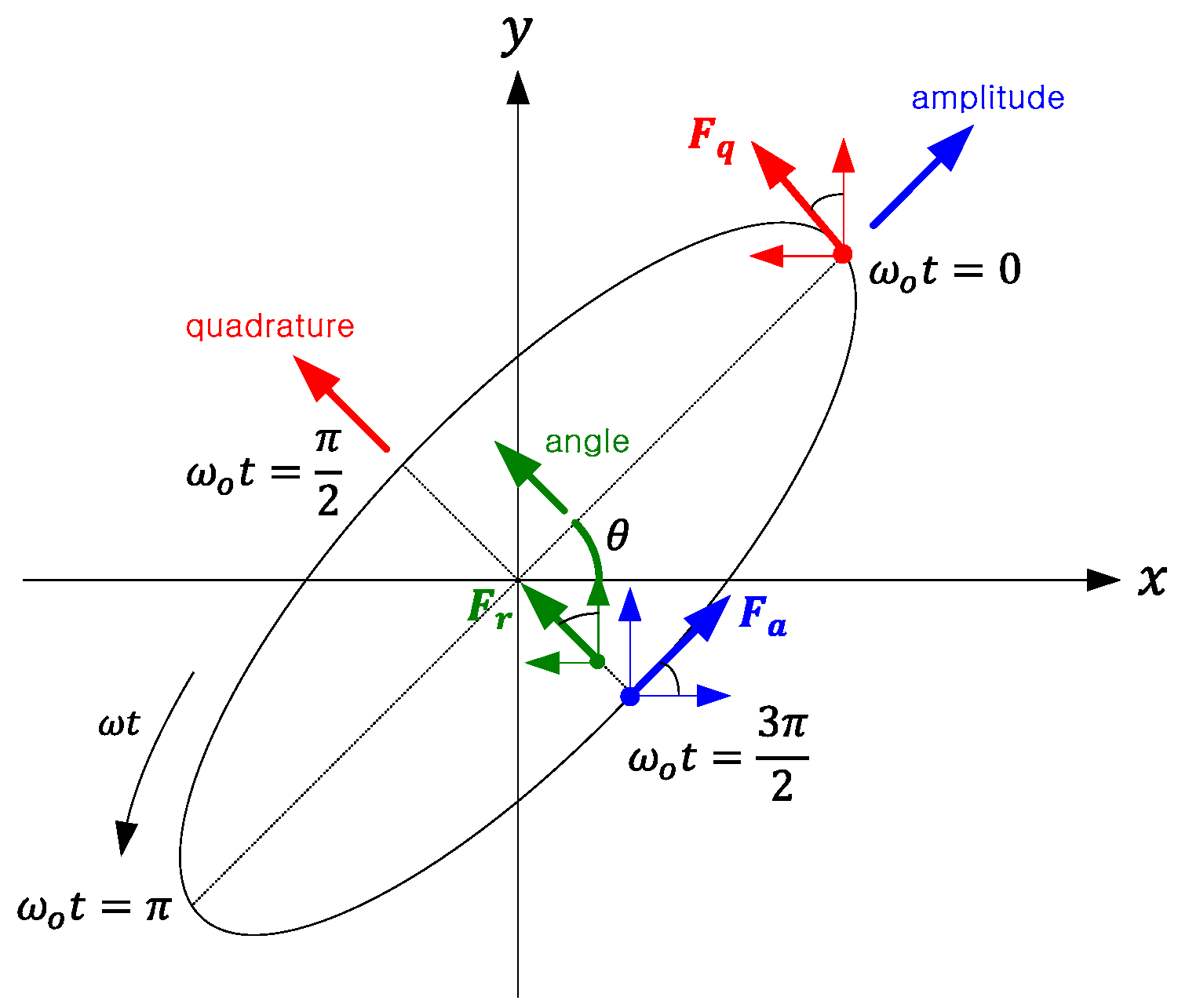
In the meantime, the traditional control method controls the x-axis to be major axis of the elliptical trajectory expressing the pendulum variables from the axis where the excitation and sensing electrodes are arranged. On the contrary, the differential control method controls the axis which forms a 45° angle with the x-axis, to be the major axis of the elliptical trajectory, This method has the advantage that it can remove the common mode error for both the x-axis and the y-axis and is easy to switch to the integral angular velocity mode [
5].
As such, next generation HRGs will evolve into representative gyros, which can materialize the demands for subminiature structure, high precision and high reliability by the development of 2-piece systems applying multi-flexing methods, differential control algorithms, etc. To develop such subminiature and high precision HRGs, advanced core processes such as the production of low-loss hemispherical resonators and electrode blocks, low-stress heterojunctions, the balancing and tuning, high degrees of vacuum packaging, etc. and electronic module technologies such as low-noise pre-amplifiers, FPGA-based high precision digital signal processing and control circuits, error modelling and compensation techniques, etc. must be developed.
Therefore, in this article, electromechanical modelling will be performed on a 2-piece system equipped with a multi-flexing technique and a signal processing and control algorithm design based on that. In
Section 2, the resonator motion equation with continuous harmonic excitation will be deduced and the major electromechanical gains between the resonator and the electrodes calculated through the modeling. At this time, the mode shape of the resonator will be considered. In addition, the equation of the resonator motion for case that the switched harmonic excitation is applied by the multi-flexing will be induced, and its results will be compared with the case of continuous harmonic excitation. In
Section 3, the signal processing and control algorithm will be designed based on the electromechanical modelling results. In this section, the signal processing algorithm based on the multi-flexing method and the differential control algorithm in the rate gyro mode (or FTR mode) will be designed. The designed control algorithm will be tested through Matlab/Simulink SW and the design results will be verified finally by comparing the results of an actually made sensor with the simulation results through suitable experiments.
2. Electromechanical Modeling of a HRG with Switched Harmonic Excitations
As mentioned in the previous section, a HRG is a sensor to measure the input angular velocity using the precession motion of the elastic standing wave caused by a Coriolis force. The circular section of the hemispherical resonator in the non-vibration state repeats the circle, horizontal elliptical shape, circle and vertical elliptical shape in the secondary mode [
6]. The location of the maximum amplitude and the non-vibration location are referred to as the antinode and node, respectively, and generally, the equation of HRG motion is induced through the secondary resonance mode having two nodes and antinodes [
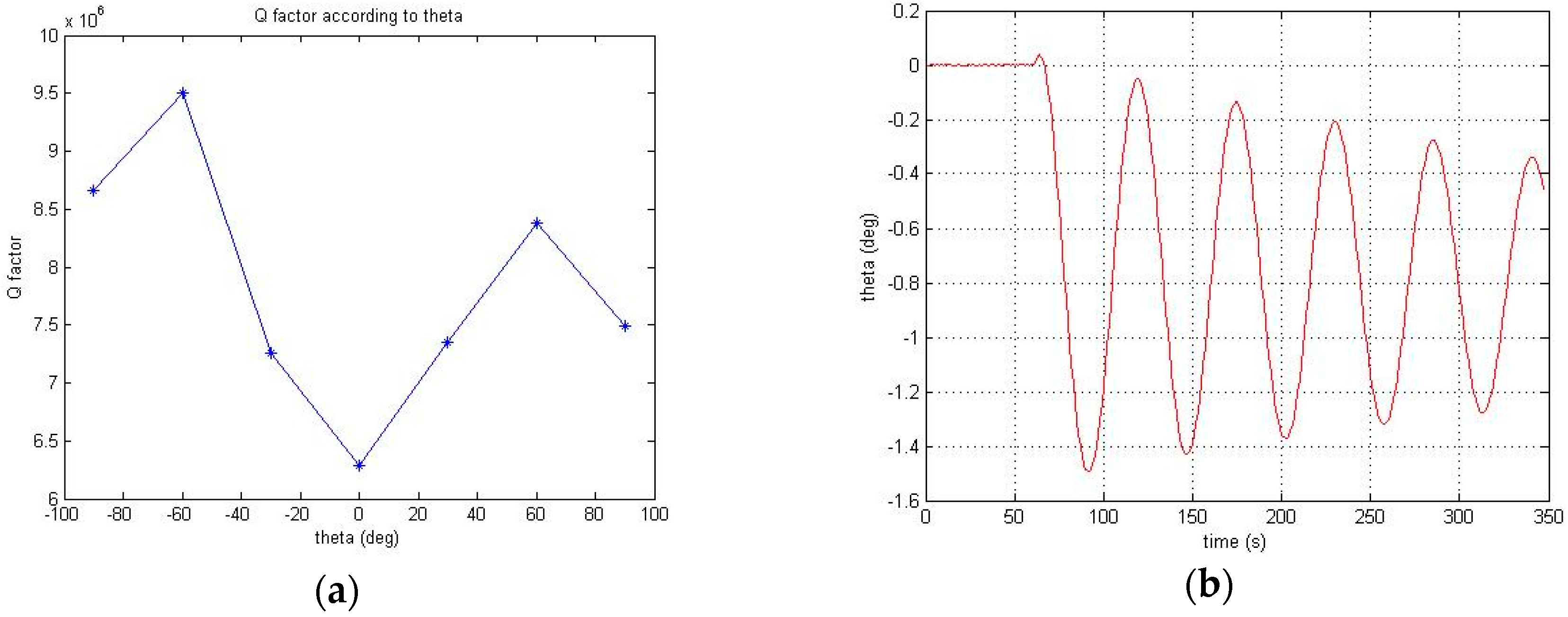
7]. Basically, such a HRG system can be modeled with the secondary spring damper system and due to causes such as mass unbalance,
etc. anisoelasticity errors and damping mismatch occur, which cause the frequency and Q-factor to split, respectively, which are the most important causes of errors of HRG sensors [
8].
2.1. Full Equations of Motion with Harmonic Excitations
The general full equations of motion of a HRG considering the influences of frequency coupling and damping imperfection are as follows [
8]:
where
is the angular velocity of system about the vertical axis of x-axis and y-aixs,
is the mean resonant frequency,
is the Brian coefficient (~0.3),
C11 = (2/τ) + Δ(1/τ)cos2
θτ,
C12 =
C21 = Δ(1/τ)sin2
θτ,
C22 = (2/τ) − Δ(1/
τ)cos2
θτ,
K11 =
ω2 −
ωΔ
ωcos2
θω,
K12 =
K21 = −
ωΔ
ωsin2
θω,
K22 =
ω2 +
ωΔ
ωcos2
θω,
ω2 = (
ω21 +
ω22)/2, 1/
τ = ½(1/
τ1+1/
τ2),
ωΔ
ω = (
ω21 −
ω22)/2, Δ(1/
τ) = (1/
τ1) − (1/
τ2),
is the angle of the unbalance between the x-axis and the major axis of resonance mode,
is the angle between the x-axis and the major axis of the linear damper (readers should refer to
Appendix A for further details).
To calculate the nominal amplitude and the time constant of each axis, let’s assume that there is no frequency coupling by the damping mismatch and the mass unbalance in the above equation and no input angular velocity. Then, the motion characteristics for the each axis in the above equation can be interpreted as the equation of motion of the secondary spring damper system below:
where
is modal mass,
τn = 2Q/
ω,
is the quality factor. In this moment, the excitation force to be applied continuously can be modeled with the harmonic function as follows:
where
is the change of control force per unit voltage,
is ac control voltage.
With the aid of Euler’s formula, the solution,
can be written in the form [
9]:
where
,
is bias voltage,
is the change of capacitance per unit displacement,
. Since
with the assumption that the quality factor is high, the equation above can be arranged as follows. The variables needed for deriving the equation are summarized in
Table 1 and it can be schematized as shown in
Figure 1.
In Equation (5), as
can be assumed, when expressing the amplitude as
,
, the nominal amplitude
and the time constant
can be calculated as follows:
2.2. The Nominal Amplitude and Time Constant of HRG with Switched Harmonic Excitations
In the case of a 2-piece HRG system, it switches the sensing and driving cycles and the x-axis and y-axis using the common element, so the excitation force in Equation (3) is not given continuously but as much as the time determined within the certain cycle, which can be expressed as Equation (8) as follows:
where
,
is the total operation cycles, including sensing and driving cycles,
is the x-axis control cycle.
To obtain the system time response characteristics when the non-continuous excitation force is given, the Duhamel integral (or convolution integral) method is used [
9]. The Duhamel integral method is the special form of integral to be applied when obtaining the output signal in a linear system if the input signal and the system impulse response are given:
We get the unit impulse response of a viscously damped SDOF system. By convention, the unit impulse response function is frequently called
[
9]:
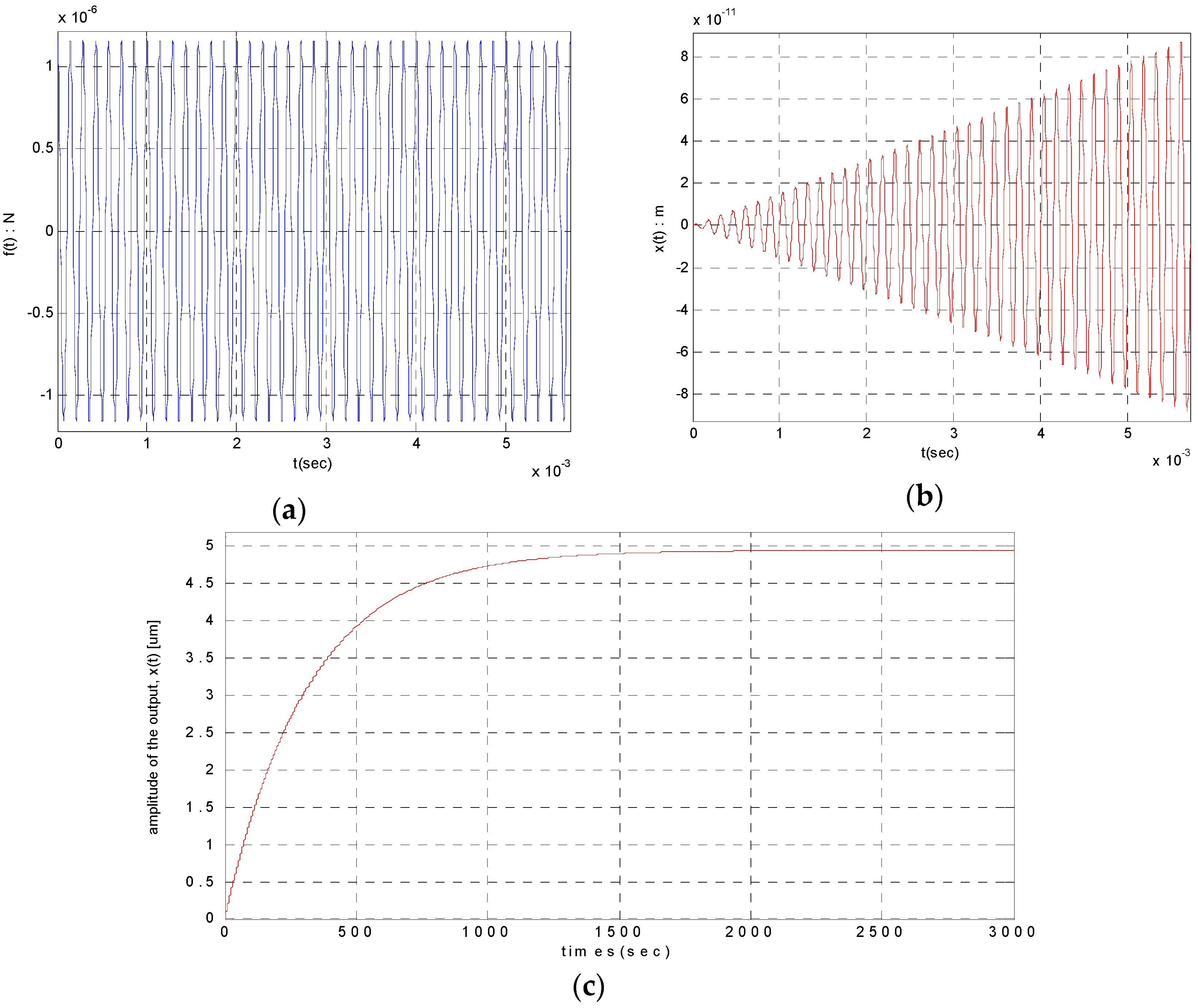
Let’s calculate
by inserting above Equations (8) and (10) into Equation (9). Since
when
,
. In the section of
,
, as the excitation and the unit impulse response show the phase difference as
Figure 2a, and in the section of
,
, they show the phase difference as
Figure 2b, the integral can be arranged as follows:
- Case a.
- Case b.
Assuming that
,
, the calculation results are as follows: as in this moment, the Q-factor is high, we can assume that
:
it can be arranged as follows:
Refer to
Appendix B for further details. If Equations (14) and (15) are inserted to Equations (11) and (12), the time response of SDOF spring-damper system by the switched excitation can be arranged as follows:
- Case a.
- Case b.
The time response characteristics of the mean amplitude by the switched excitation are as follows:
Refer to
Appendix C for further details. Accordingly, when
, the nominal amplitude and the time constant are calculated as follows:
Through the above results, it is observed that the amplitude can be obtained by multiplying the rate of the driving cycle against the entire operation cycle compared with the amplitude when the continuous excitation is applied, and the time constants are almost same.
This is the important input data for electromechanical gains and design of controller. The amplitude results are schematized as shown in
Figure 3.
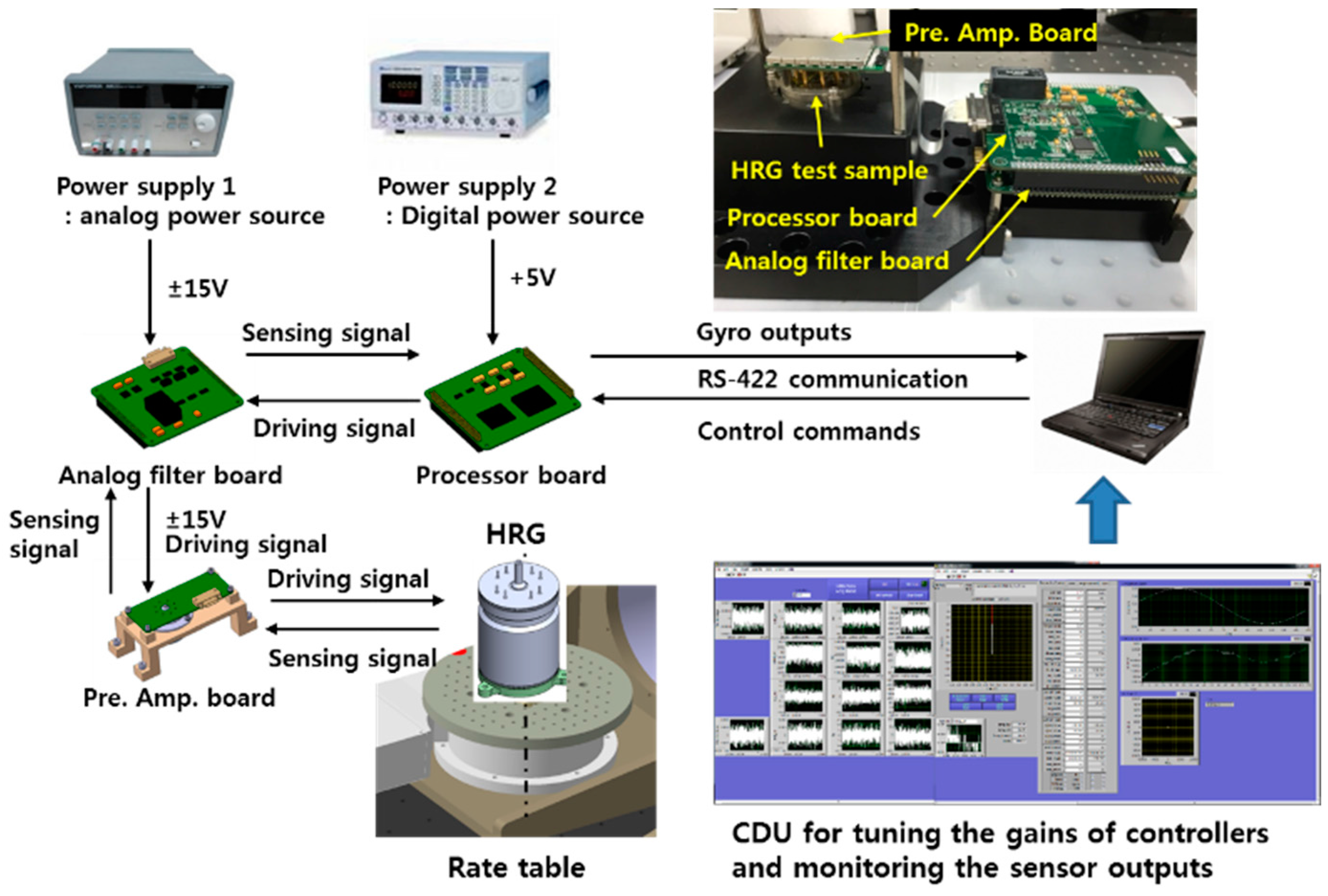
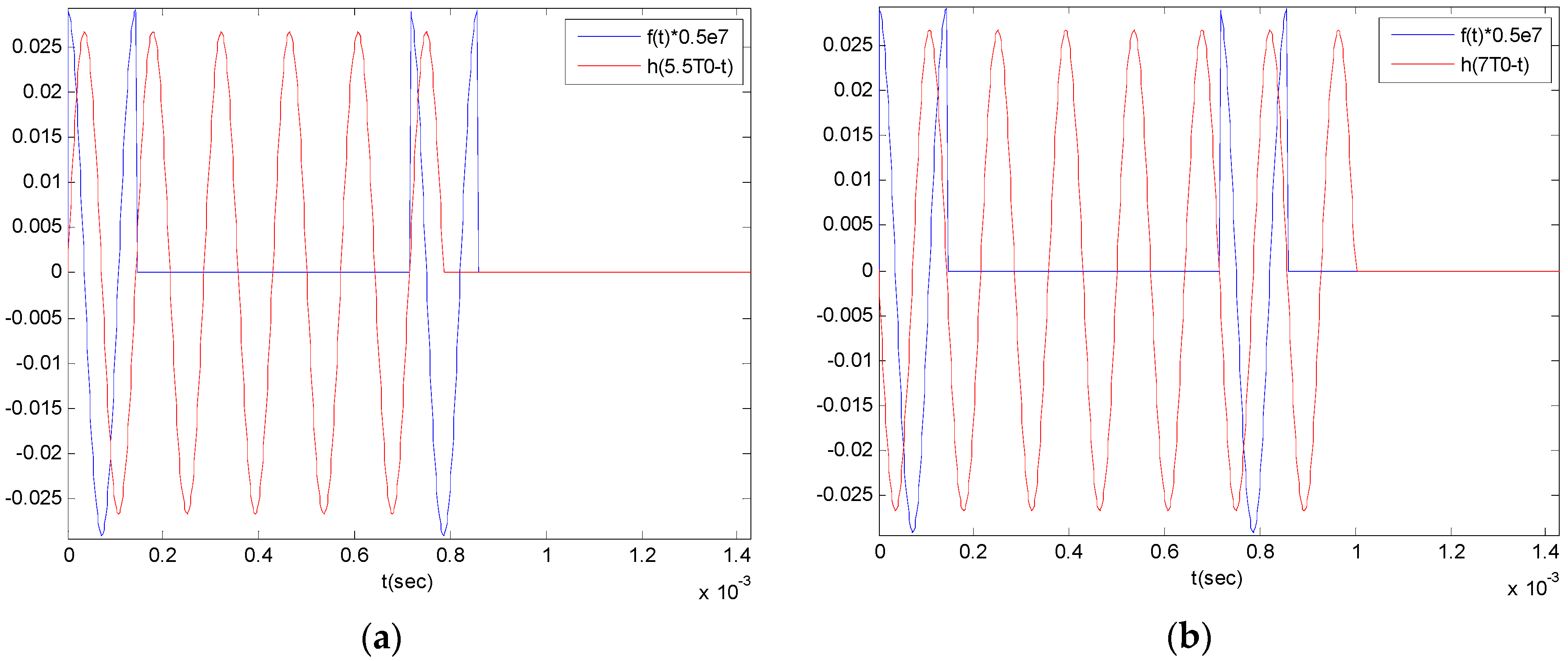
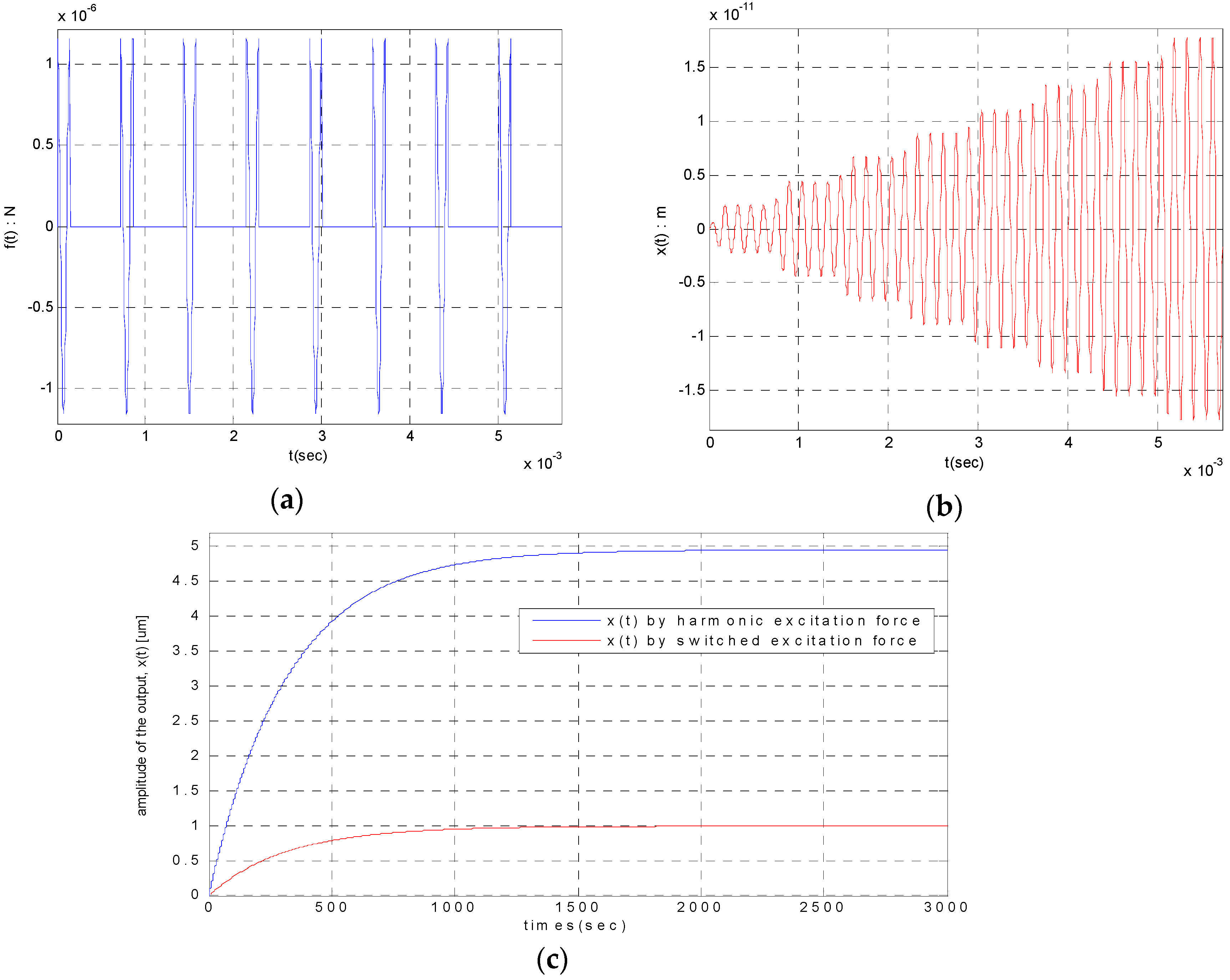
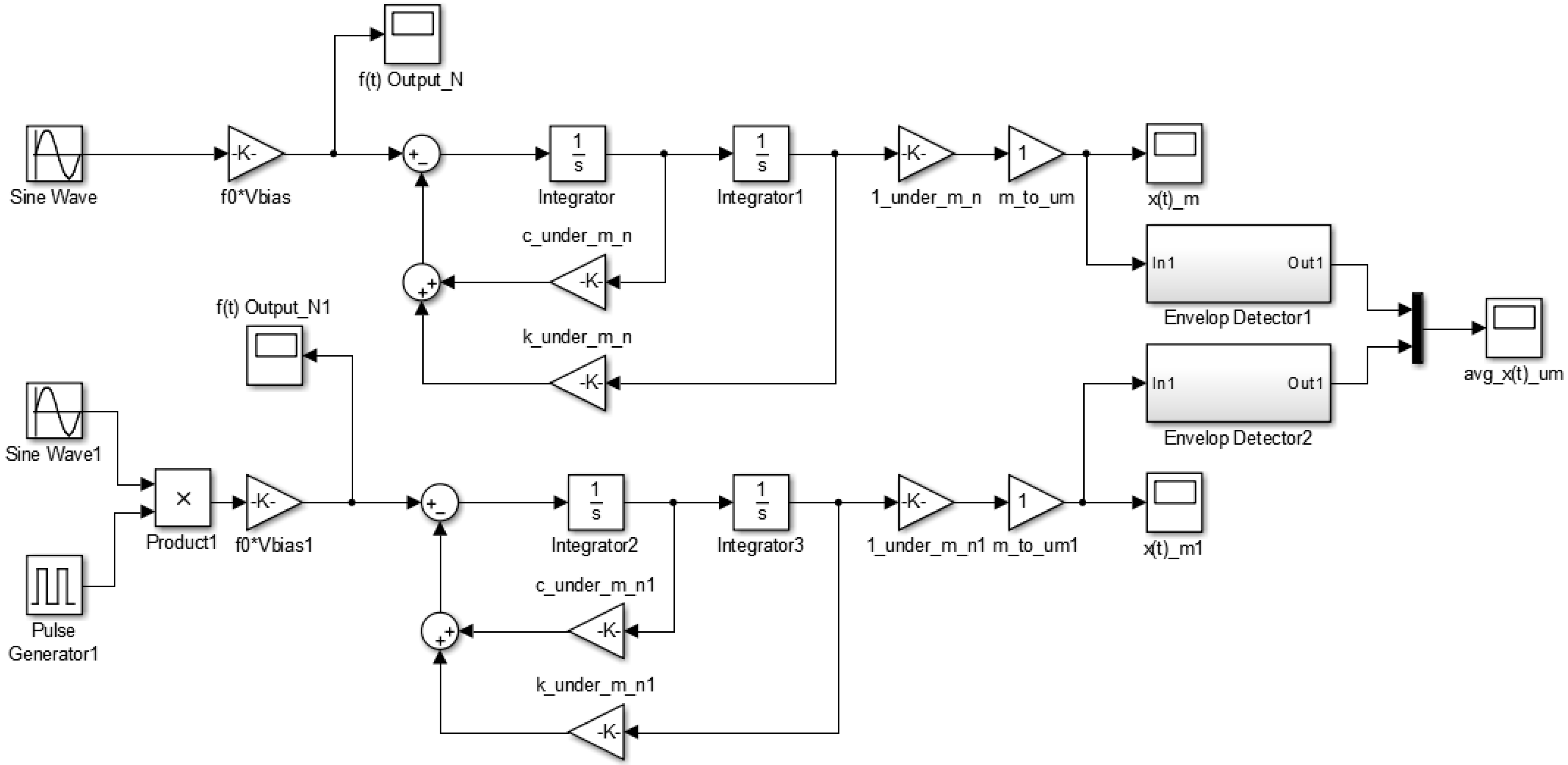
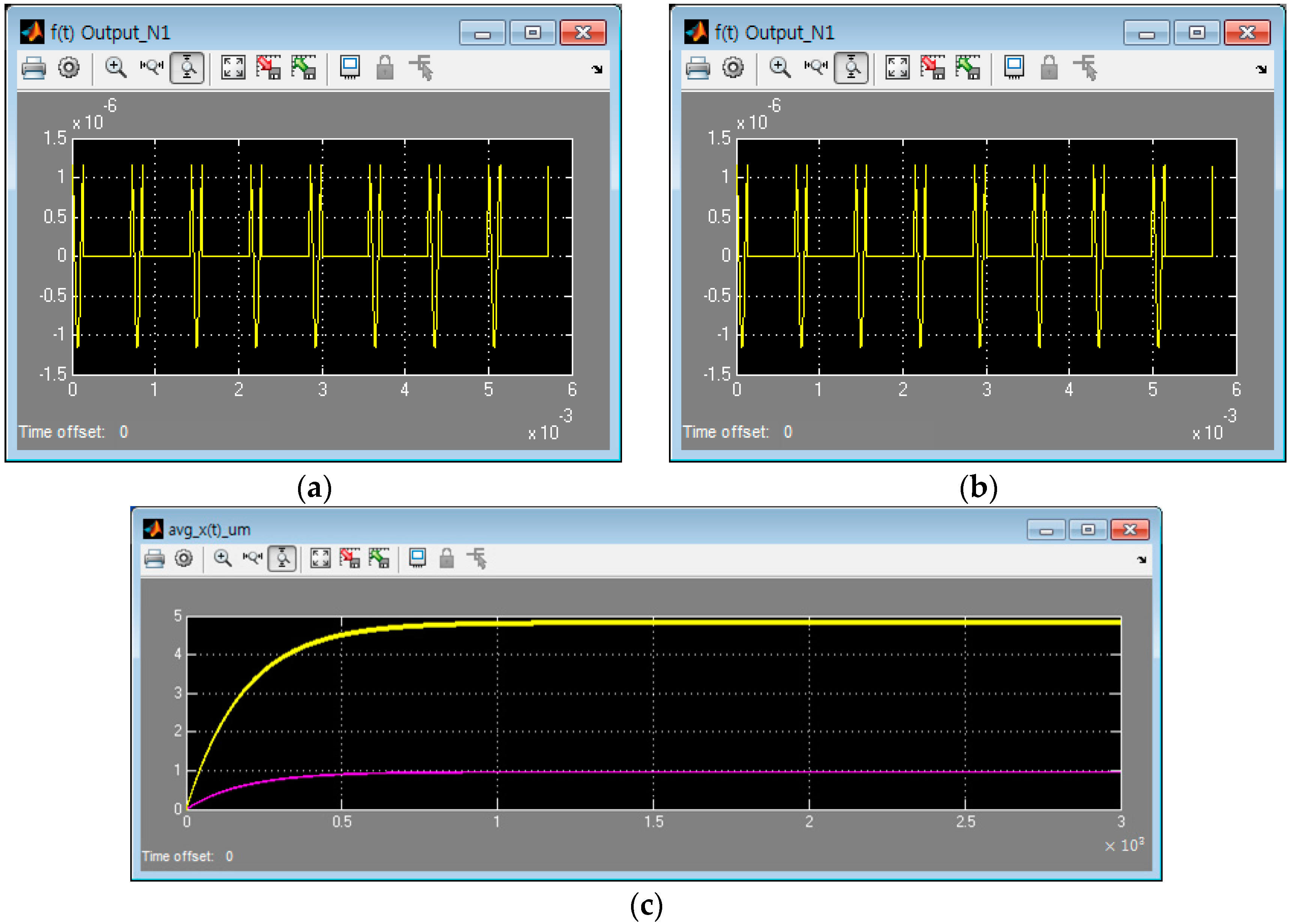
2.3. Verification of the Analytic Results through Simulations
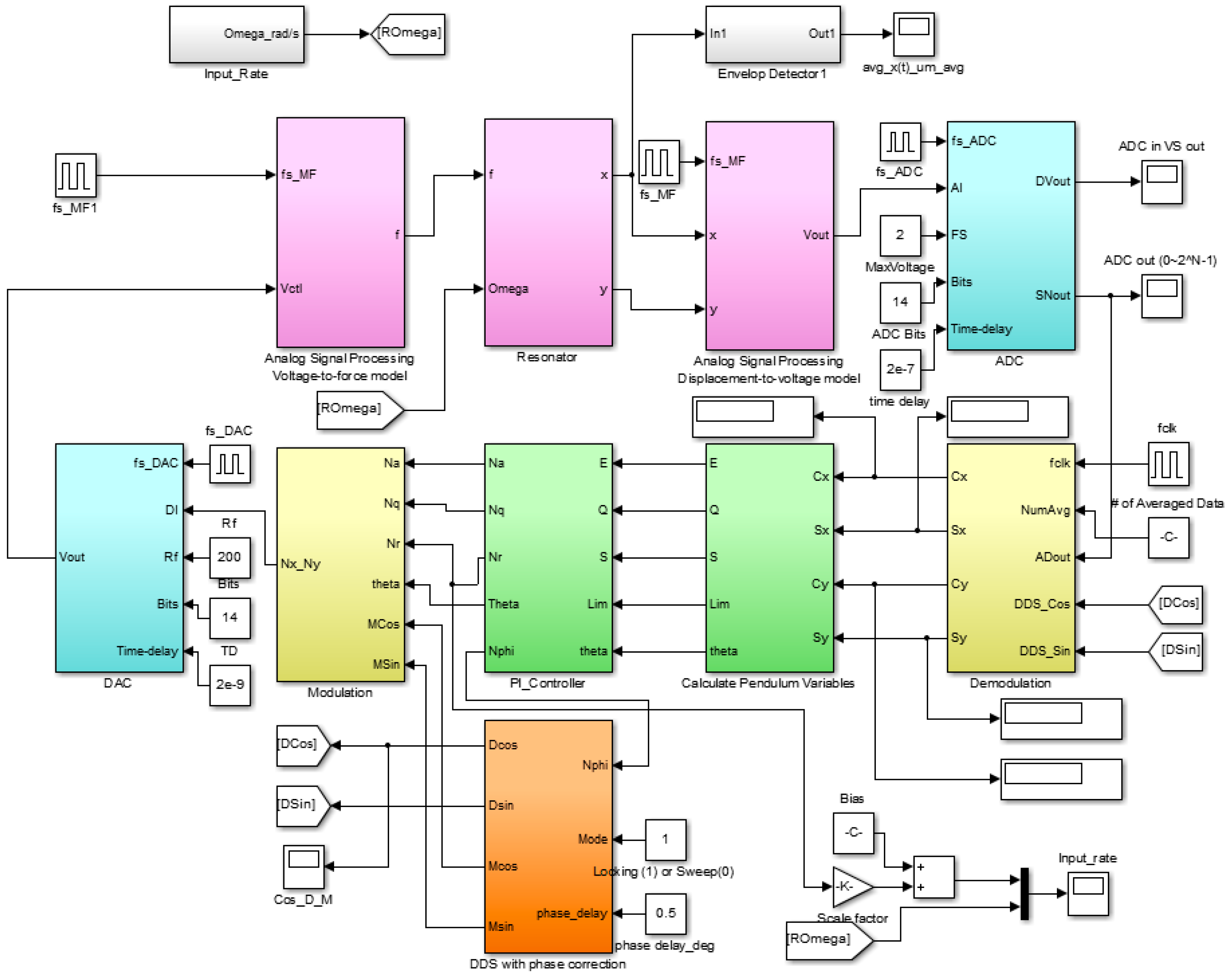
To test the above interpretation results, the Matlab/Simulink SW was prepared as shown in
Figure 4 and the simulation was performed. It is observed that the results are as same as
Figure 5 and is identical when comparing with
Figure 3.
2.4. Electromechanical Modeling between Resonator and Electrodes
Before designing the signal processing and control circuit, the electromechanical modeling between resonator and electrodes must be done to estimate the capacitance change for different electrostatic forces.
The gap between the resonator and the sensing (or driving) electrode block cannot be assumed as parallel plate simply. For the resonator, the 2nd vibration shape corresponding to a standing wave in the thin hemispherical shell should be considered. Therefore, in this article, the capacitance change and the changes in the electrostatic force are calculated considering the mode shape and modal force.
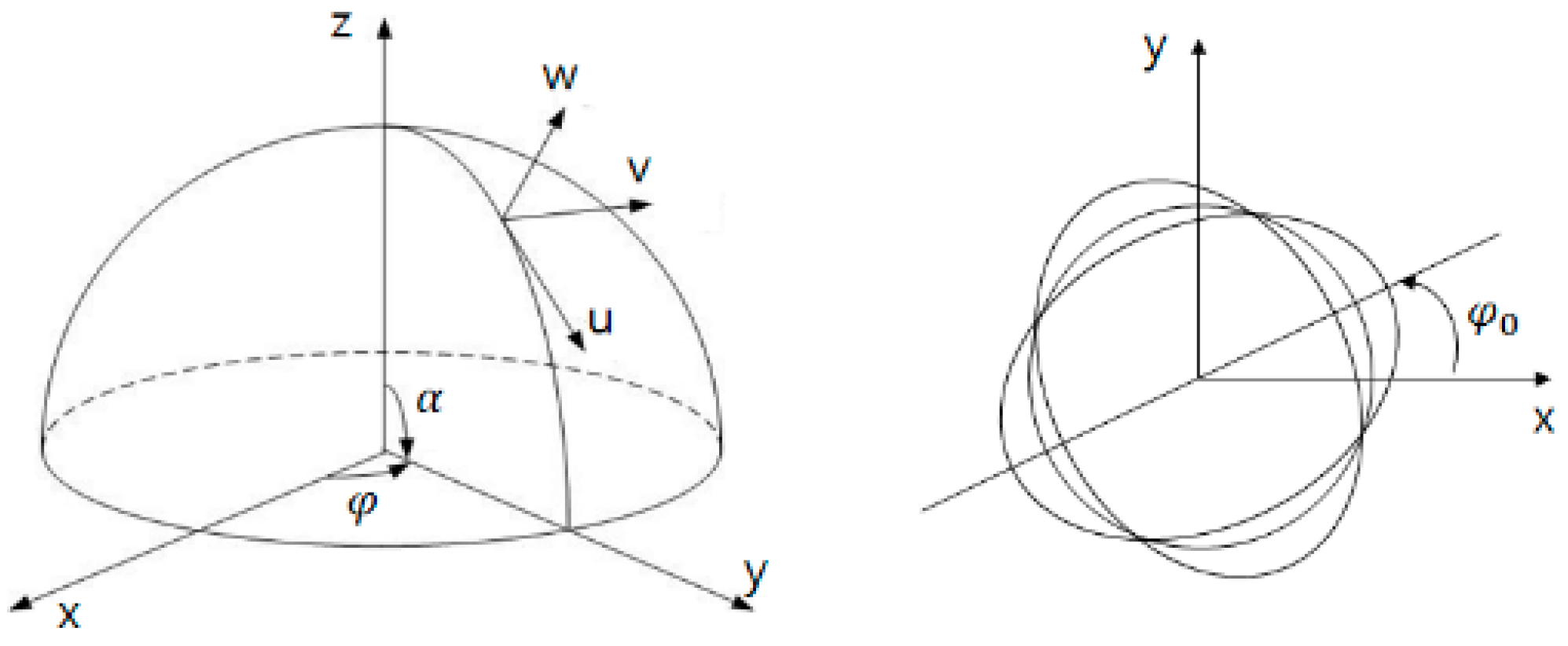
According to Rayleigh, the mode equation for the mode shape analysis among the second vibration mode equations of the thin hemispherical shell of the resonator can be represented [
10]:
where
is the 1st and 2nd wave amplitude,
is the orientation of the wave relative to the resonator.
is clear from
Figure 6.
The mode shape calculated by inserting
to Equation (21) is as follows:
The electrostatic capacitance
and capacitance changes by the displacement
in the sensing electrode are induced as follows using above equation:
where
,
is a modal amplitude. See
Table 2 for the rest of the variables. If Equation (22) is inserted to Equation (24), it is as follows:
If Equations (26) and (27) is inserted to Equation (25), it is as follows:
The calculating the control force
by the control voltage
applied to the electrode block is as follows:
Equations (26) and (27) are inserted to Equation (29), it can be arranged as follows:
The equation related to the amplitude of resonator by the control force is as follows:
The equation of the change amplifier output by the change in the amplitude is as follows:
By inserting the values in
Table 2 into Equations (23), (28), (30)–(32), the electromechanical gains in
Table 3 can be obtained:
If 5-cycles operation multi-flexing method, where
, is applied and four electrode blocks are assigned to the signals of x-axis and y-axis, the control force, the amplitude and the output voltage of charge amplifier by control voltage of 100 mVac are follows:
In the measurement results after making actual sensor, the amplitude by the control voltage of 100 mV was 1.02 μm and the output voltage of the charge amplifier was 143 mV showing 5.1% and 6.9% of differences, respectively, which proves that the design results are valid when considering the error in the process and measurement. Based on the electromechanical gains mentioned above, the proper signal processing and control circuit will be designed.
4. Conclusions
HRG is one of the kinds of CVG, which measures the angle or angular velocity using the Coriolis force produced by the rotational motion. The rotational angle or angular velocity can be measured using the principle that the standing wave generated in the quartz resonator in the form of hemisphere shell performs the procession motion.
HRG technology development is underway in many advanced countries and the next generation HRGs, which can materialize the objectives of subminiature size, high precision and high reliability with the 2-piece HRG system is being applied with multi-flexing method and differential control development in the United States, France, etc.
Therefore, in this article, a controller design suitable for a 2-piece HRG system was performed. To design the controller, the electromechanical modeling of the 2-piece HRG system was pre-performed. To interpret the vibration characteristics due to the switched discontinuous excitation force, the Duhamel integral method was applied. In addition the electromechanical gains were calculated considering the mode shape of the thin hemispherical shell. It was proven that the design results are valid by showing an error within 7% in the comparison between design results and measurement results of the amplitude and charge amplifier output.
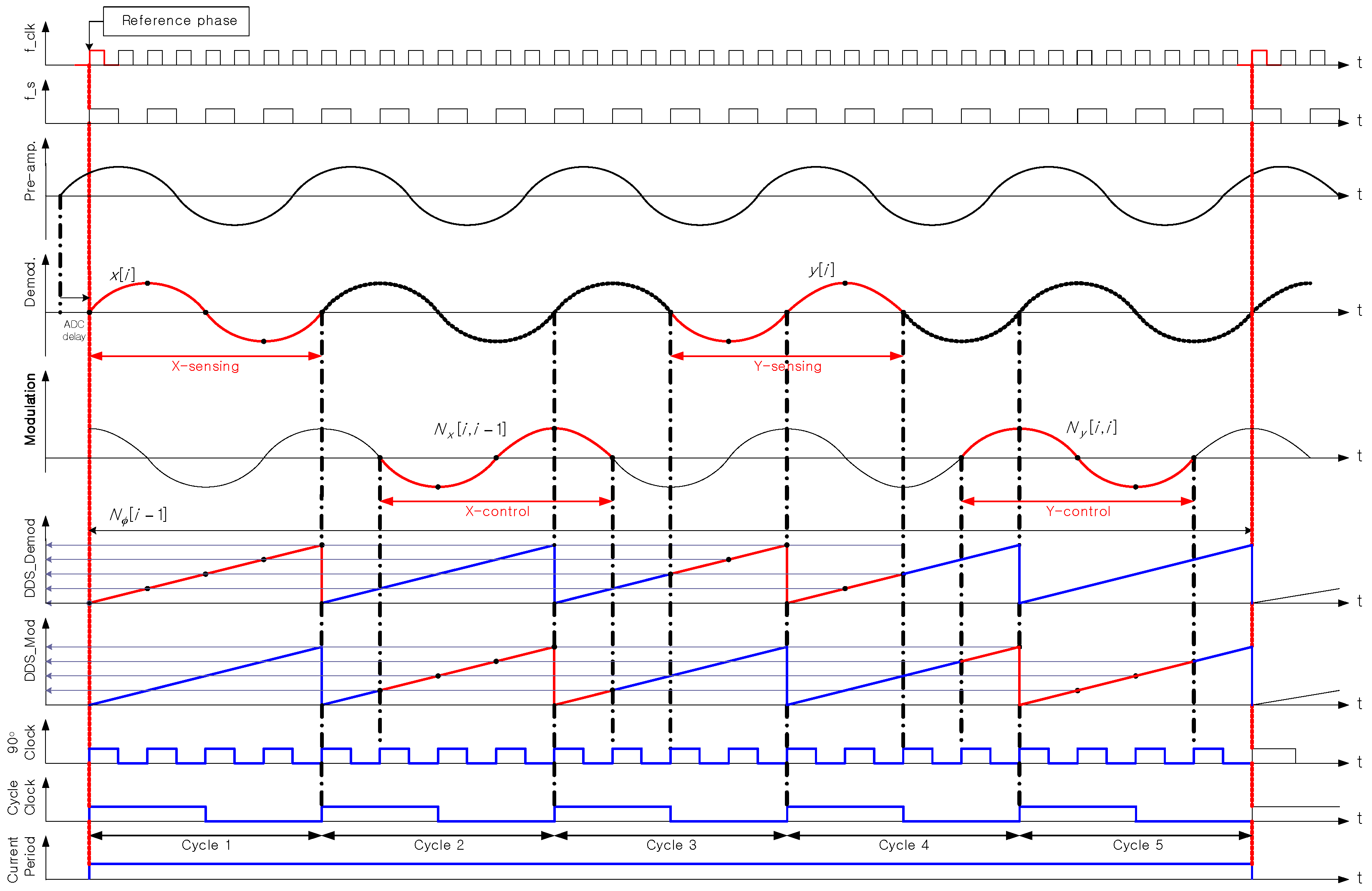
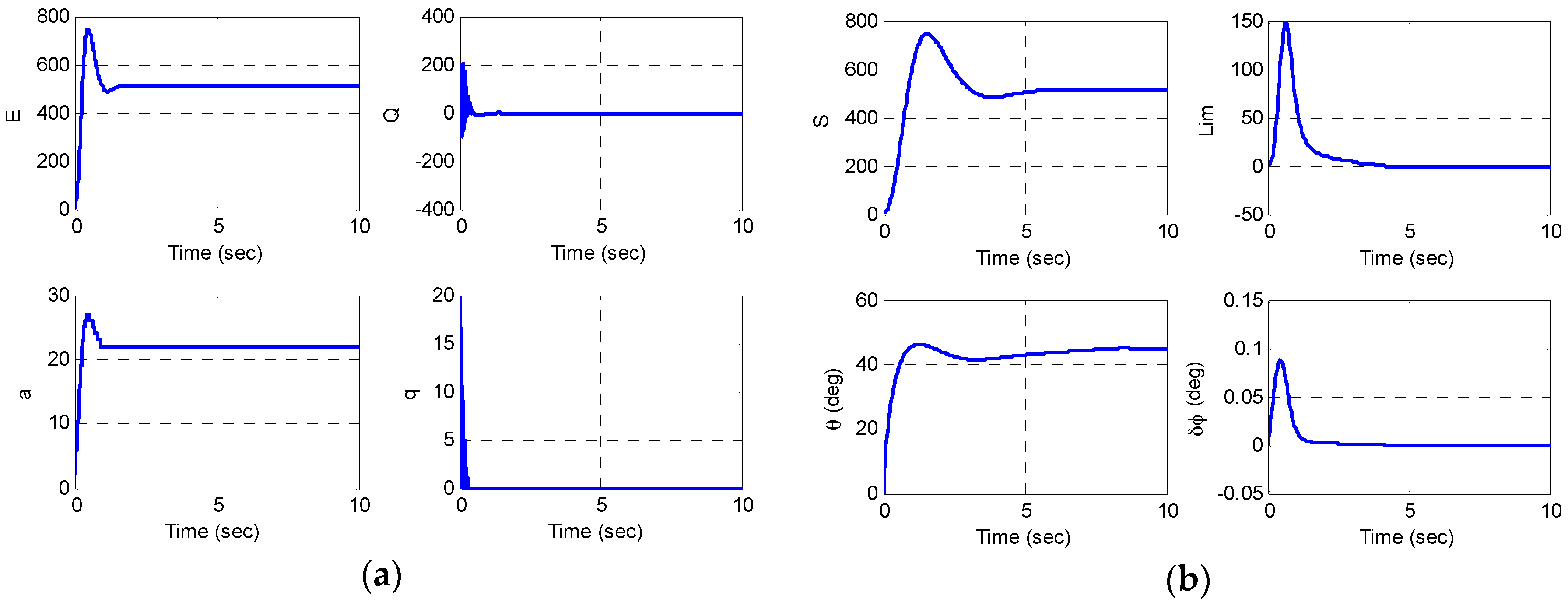
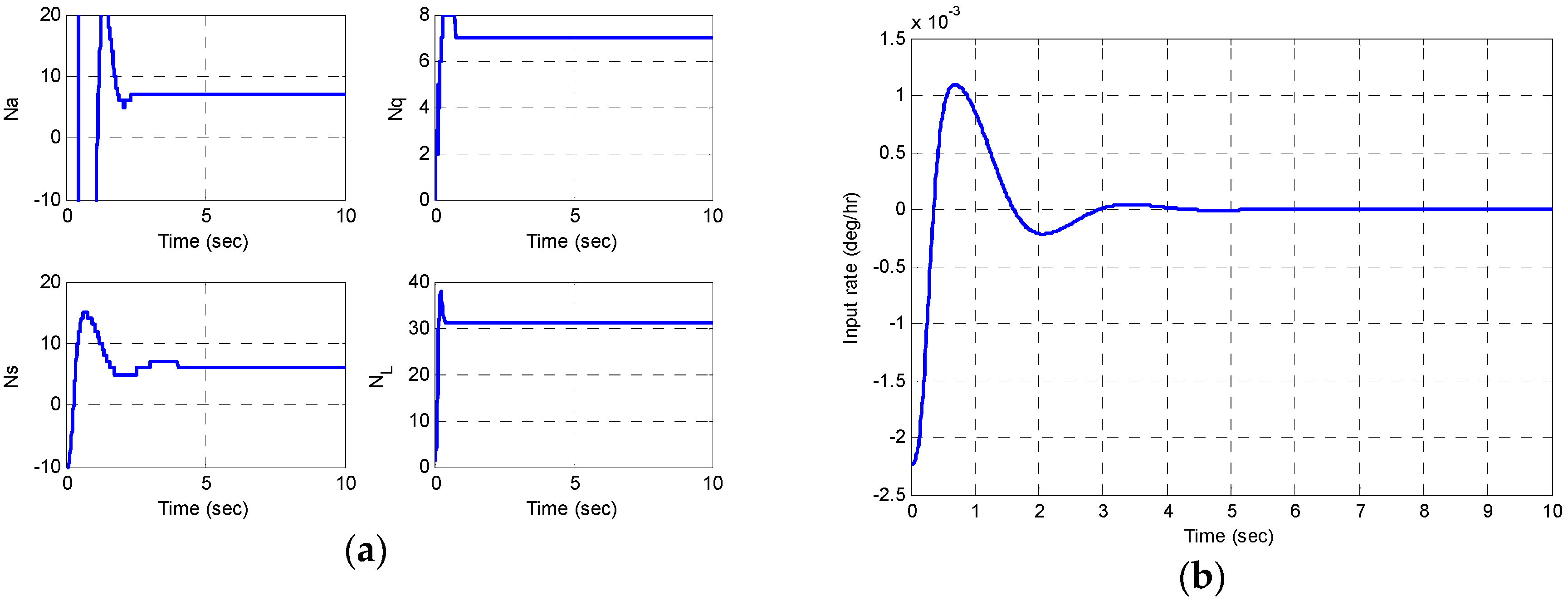
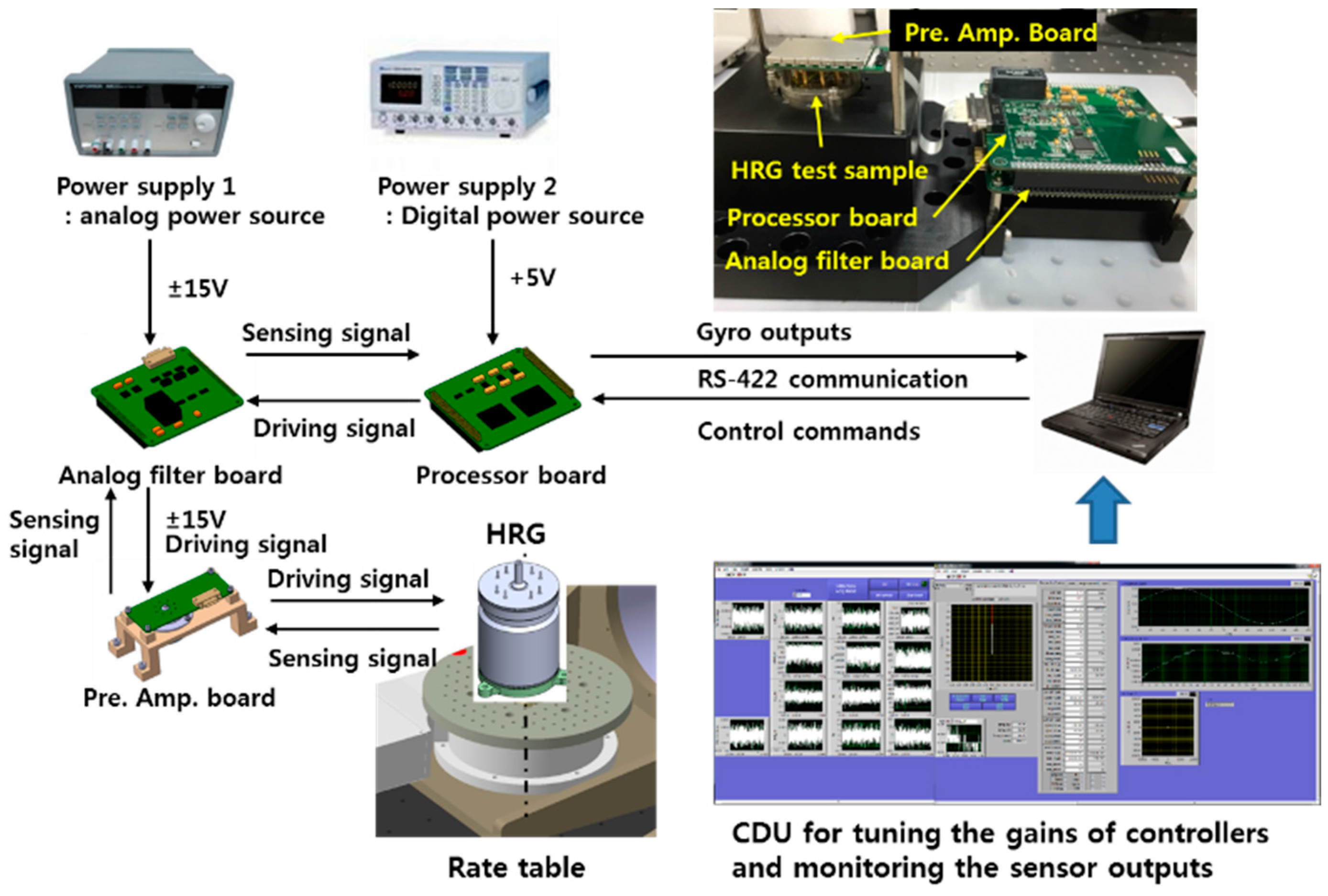
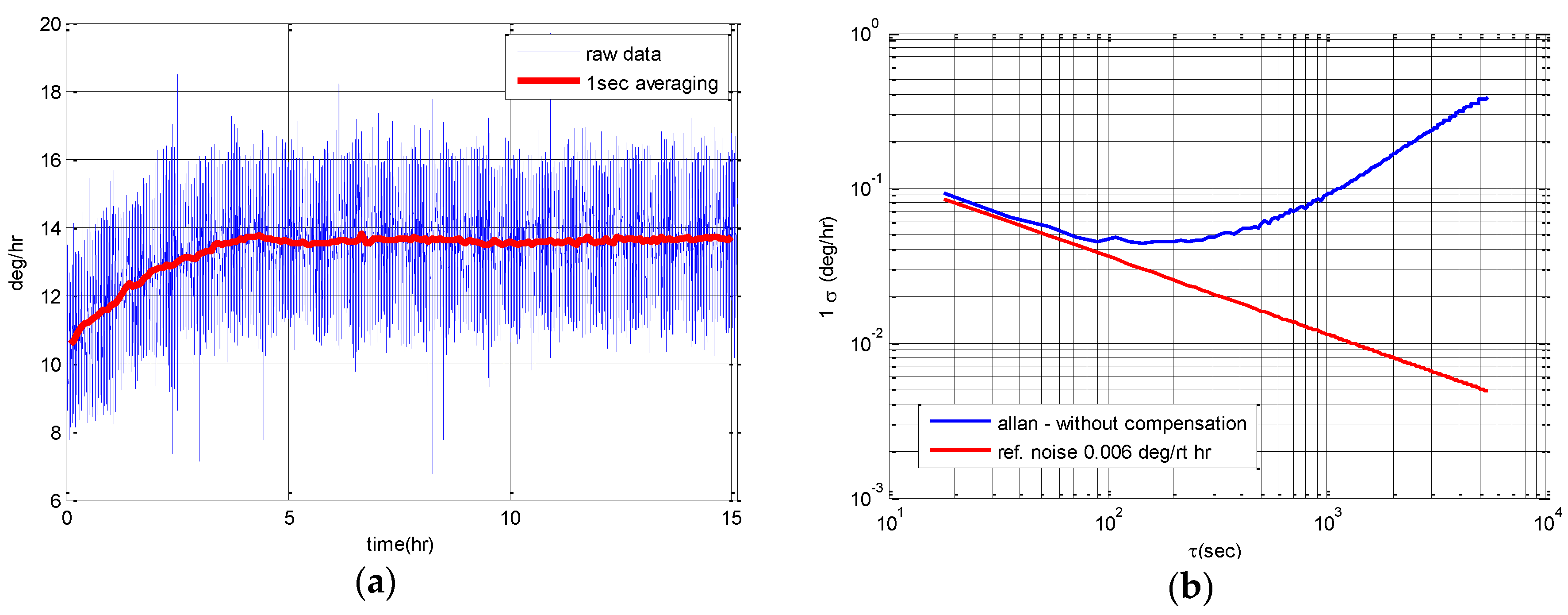
Based on such modeling, the signal processing based on the multi-flexing method and differential control algorithm were designed. The sensing and driving cycles of x- and y-axis were divided by time with five operation cycles using a common element. The sensing signals generate the control inputs signal through the sampling and demodulation processes. The controller output generates the final control voltages through the modulation processes and the phase delay compensation algorithm was applied in the modulation process. In FTR mode, Control is composed of phase, amplitude, quadrature and rate control and the pendulum variables are used as control variables. The designed algorithm was verified through Matlab/Simulink simulation and in the results, the bandwidth of the amplitude and quadrature control were satisfactory, at 1–5 Hz, and the bandwidth of the rate and phase control were satisfactory at 7.5–12.5 Hz. Finally, the electronic circuit was made by equipping the algorithm in FPGA and DSP and that it satisfied with the target bandwidth was verified through the experiment. In addition, through the sensor linking test, the error identification was performed and it was conformed that the bias instability and ARW are approximately 0.07°/h and 0.006°/(rt·h), respectively by performing the gyro performance test.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}