
An Energy Saving System for a Beam Pumping Unit

Abstract
:1. Introduction
2. Principle of the Energy Saving System
- Automatic adjustment of the stroke speed. A stroke speed determination unit and a motor control unit are combined to carry out the automatic stroke speed adjustment. In the speed determination unit, the load and displacement of the polished rod of the beam pumping unit are measured by a load sensor and an angle sensor, respectively. Then, these two types of data are fed into a wave equation to get a pump dynamometer card, and the optimal stroke speed is determined so as to maximize the area of the pump dynamometer card. In the motor control unit, a frequency converter is used to adjust the motor flexibly to make sure that the pumping unit is running at the optimal stroke speed.
- Estimation of the degree of balance. The input voltage and current of the three-phase motor of the beam pumping unit is measured by a set of voltage and current sensors. Then, the real-time active power of this motor is calculated, and the ratio of the total power consumption between the downstroke and upstroke is regarded as the indicator to assess the balance degree of the pumping unit.
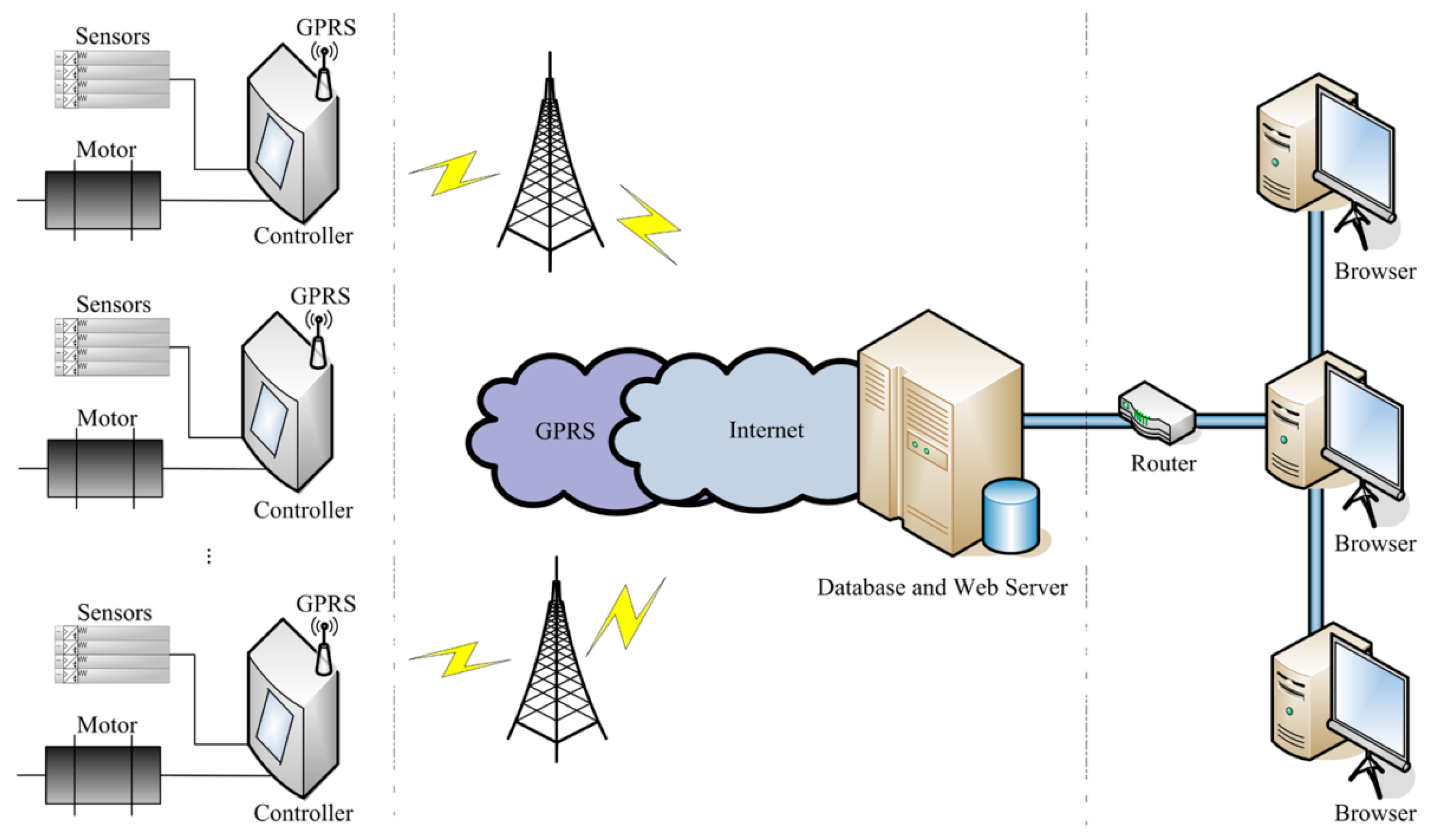
- Remote supervision of the operating states. The remote supervision platform consists of two parts, including a database and web server unit, as well as a remote monitoring unit. The database and web server unit receive the real-time status data sent from different oilfields by means of General Packet Radio Service (GPRS), stores them in the database and delivers web pages to remote terminals. The remote monitoring unit allows clients to monitor the operating states of pumping units using a browser on a computer or smartphone and make a timely response to abnormal situations.
3. Methods
3.1. Method of Stroke Speed Determination
3.2. Method of Balance Estimation
3.3. Method of Performance Evaluation
4. Composition of the Energy Saving System
4.1. Hardware
4.1.1. Main Hardware Components
4.1.2. Sensors
4.1.3. Controller
- Sensor data receiving. Sensor data is the basis of subsequent processing and analysis. A filter circuit was designed to reduce the noises from environment, especially from the frequency converter in this controller, itself. Then the filtered signals were fed into the analog-to-digital converters for digitization.
- Data calculation and motor control. The stroke speed determination unit was dedicated to calculation of the optimal stroke speed by maximizing the area of the pump dynamometer card. The motor control unit was used to adjust the motor speed flexibly by means of a frequency converter to make sure that the pumping unit running at the optimal stroke speed, and the balance degree estimation unit was devoted to the estimation of balance degree of pumping unit. In the controller, a dual-CPU embedded subsystem based on digital signal processor (DSP) and advanced RISC machine (ARM) was designed to implement the tasks of calculation and control, respectively.
- Human machine interaction. A LCD, a key board and several buttons on the front panel were used for the interaction between human and machine. The LCD was employed for the display of menu, real-time status data, curves of dynamometer cards, and so on. The keyboard was mainly responsible for authentication and parameter setting, and the buttons were devoted to manual operation in an emergency, such as system reset, emergency stop, and power switch.
- Data exchange with the server. The network connectivity is essential for a practical application of IoT technology in energy savings of a beam pumping unit. Considering the poor network conditions in an oilfield and the cost of long-range wireless communication, a GPRS module was chosen to implement the real-time data exchange with the server online, instead of a 3G module or even the Internet.
4.2. Software
4.2.1. Embedded Software
4.2.2. Remote Supervision Platform
- Static information. The information that will not change over a long period of time is declared on the first child page. For example, the location, type, and various mechanical parameters of beam pumping unit, as well as the latest maintenance date, name of the person in charge, contact number, and so on.
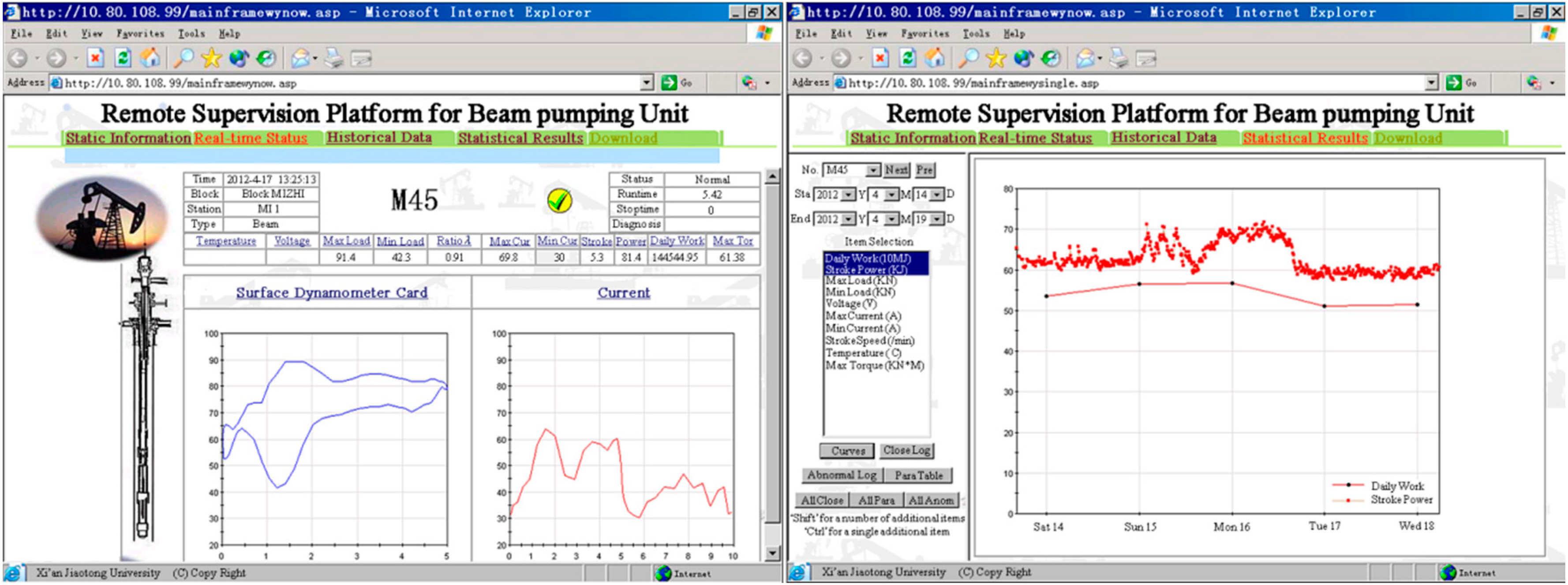
- Real-time status. A series of measured values in the latest action cycle can be retrieved from the database server in real-time, including the load and displacement of the polished rod, as well as the input voltage and current of motor. The real-time data is analyzed and processed before being displayed on webpages in an acceptable form, such as curves on a graph or figures in a table. The latest surface dynamometer card, stroke speed, ratio , peak/valley load, peak/valley current and other meaningful items can be found on the second child page.
- Historical data. All kinds of status data within the past five days is temporarily retained in the database server, so that the historical status of pumping unit in a valid specified period can be queried and displayed on the historical data query page.
- Statistical results. The optimal operation state since the beginning and statistical results per day are permanently stored in the database server. These data can be used to make a comparative analysis and generate statistical reports of any number of days, and the reports could be printed out, if necessary.
5. Results and Discussion
5.1. Installation in Oilfields
5.2. Validation of the Utility of ESS-BPU
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ma, Z.; Peng, S.L.; Qu, Z.Z.; Li, J. The detailed calculation model of the friction between sucker rod and the liquid in the sucker rod pump lifting system of heavy oil. Appl. Mech. Mater. 2014, 694, 346–349. [Google Scholar] [CrossRef]
- Liu, F.; Patel, A. Well failure detection for rod pump artificial lift system through pattern recognition. In Proceedings of the International Petroleum Technology Conference, Beijing, China, 26–28 March 2013.
- Goswami, S.; Chouhan, T.S. Artificial lift to boost oil production. Int. J. Eng. Trends Technol. 2015, 26, 1–5. [Google Scholar] [CrossRef]
- Xing, M.; Dong, S. A new simulation model for a beam-pumping system applied in energy saving and resource-consumption reduction. SPE Prod. Oper. 2015, 30, 130–140. [Google Scholar] [CrossRef]
- Brown, K.E. Overview of artificial lift systems. J. Pet. Technol. 1982, 34. [Google Scholar] [CrossRef]
- Peng, Y.; Yan, W.; Wu, H. The study on energy saving and output enhancement of pumping well based on the theory of qfd/triz. In Proceedings of the International Conference on Energy and Environment Technology (ICEET’09), Guilin, China, 16–18 October 2009; pp. 449–453.
- Lu, J.; He, J.; Mao, C.; Wu, W.; Wang, D.; Lee, W.-J. Design and implementation of a dual pwm frequency converter used in beam pumping unit for energy saving. IEEE Trans. Ind. Appl. 2014, 50, 2948–2956. [Google Scholar] [CrossRef]
- Feng, C. Synthetic description of status and energy-saving method on oil-abstracting engines in oilfield. Inner Mongolia Petrochem. Ind. 2008, 24, 017. [Google Scholar]
- Li, D.; Fan, J.; Wang, L.; Kou, C. Curved beam pumping unit. Oil Forum 2013, 4, 63–65. [Google Scholar]
- Zou, L.-Q.; Zhou, L. Dynamic performance analysis of double-horse heads pumping unit. Oil Field Equip. 2012, 8, 005. [Google Scholar]
- Xiang, F. High-slip motors for sucker rod pumping units. Chin. Pet. Mach. 1986, 4, 004. [Google Scholar]
- Lu, Q.; Fan, C.; Ye, Y.; Zhu, Z. A high torque density permanent magnet motor for oil pumping unit. J. Appl. Phys. 2008, 103, 07F108. [Google Scholar] [CrossRef]
- Luo, Y.; Luo, Y.; Wang, Y. A multifunction energy saving device with a novel power-off control strategy for beam pumping motors. In Proceedings of the 2009 Record of Conference Papers-Industry Applications Society 56th Annual Petroleum and Chemical Industry Conference, Anaheim, CA, USA, 14–16 September 2009; pp. 1–7.
- Tian, J.; Gao, M.; Zhou, S.; Zhang, F. Energy-saving control system of beam-pumping unit based on wavelet neural network. In Proceedings of the Fourth International Conference on Natural Computation, Jinan, China, 18–20 October 2008; pp. 509–513.
- He, J.P.; Mao, C.X.; Lu, J.M.; Yang, J.W. Design and implementation of an energy feedback digital device used in elevator. IEEE Trans. Ind. Electron. 2011, 58, 4636–4642. [Google Scholar] [CrossRef]
- Jiang, S.; Yang, X.; Yan, X.; Li, B. Simulation analysis on a sort of beam-pumping unit with new balance methods. Acta Petrolei Sinica 2005, 26, 117–120. [Google Scholar]
- Foley, W.; Svinos, J. Expert adviser program for rod pumping (includes associated paper 19367). J. Pet. Technol. 1989, 41, 394–400. [Google Scholar] [CrossRef]
- Schirmer, P.; Gay, J.; Toutain, P. Use of advanced pattern-recognition and knowledge-based system in analyzing dynamometer cards. SPE Comput. Appl. 1996, 3, 21–24. [Google Scholar] [CrossRef]
- Everitt, T.A.; Jennings, J. An improved finite-difference calculation of downhole dynamometer cards for sucker-rod pumps. SPE Prod. Eng. 1992, 7, 121–127. [Google Scholar] [CrossRef]
- Tripp, H. A review: Analyzing beam-pumped wells. J. Pet.Technol. 1989, 41, 457–458. [Google Scholar] [CrossRef]
- Miska, S.; Sharaki, A.; Rajtar, J. A simple model for computer-aided optimization and design of sucker-rod pumping systems. J. Pet. Sci. Eng. 1997, 17, 303–312. [Google Scholar] [CrossRef]
- Gibbs, S.; Neely, A. Computer diagnosis of down-hole conditions in sucker rod pumping wells. J. Pet. Technol. 1966, 18, 91–98. [Google Scholar] [CrossRef]
- Gibbs, S. Predicting the behavior of sucker-rod pumping systems. J. Pet. Technol. 1963, 15, 769–778. [Google Scholar] [CrossRef]
- Zhang, W.D.; Guan, L.G.; Zhang, G.J.; Xue, C.Y.; Zhang, K.R.; Wang, J.P. Research of doa estimation based on single mems vector hydrophone. Sensors 2009, 9, 6823–6834. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Sensor | |||
|---|---|---|---|---|
| Load Sensor | Angle Sensor | Voltage Sensor | Current Sensor | |
| Measurement range | 0~120 KN | 0~360° | 0~500 V | 0~100 A |
| Degree of precision | 0.95% | 0.05° | 1.0% | 1.0% |
| Temperature range | −30~70℃ | −40~85℃ | −40~70℃ | −40~70℃ |
| Stroke Speed | Surface Dynamometer Card | Pump Dynamometer Card | Area of Pump Dynamometer Card |
|---|---|---|---|
| 4 min−1 | 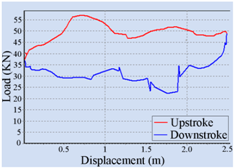 | 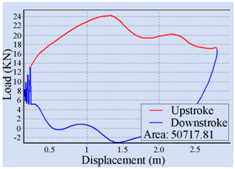 | 50,717.81 |
| 5 min−1 | 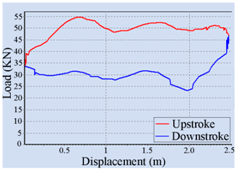 |  | 51,623.65 |
| 6 min−1 | 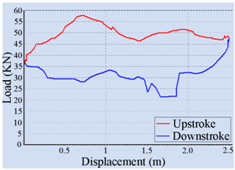 | 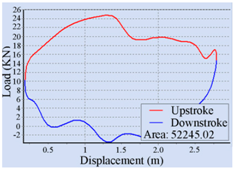 | 52,245.02 |
| 7 min−1 | 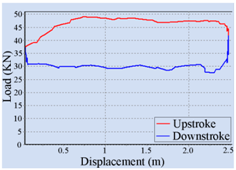 |  | 43,410.45 |
| 8 min−1 |  | 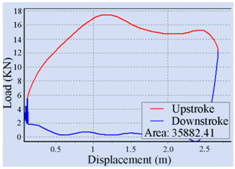 | 35,882.41 |
| Ratio | Maximum Power | Minimum Power | Average Active Power | Average Reactive Power |
|---|---|---|---|---|
| 0.65 | 11.46 KW | −5.88 KW | 8.24 KW | 5.73 KW |
| 0.92 | 7.90 KW | −3.14 KW | 6.83 KW | 4.75 KW |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, H.; Liu, J.; Han, J.; Jiang, A. An Energy Saving System for a Beam Pumping Unit. Sensors 2016, 16, 685. https://doi.org/10.3390/s16050685
Lv H, Liu J, Han J, Jiang A. An Energy Saving System for a Beam Pumping Unit. Sensors. 2016; 16(5):685. https://doi.org/10.3390/s16050685
Chicago/Turabian StyleLv, Hongqiang, Jun Liu, Jiuqiang Han, and An Jiang. 2016. "An Energy Saving System for a Beam Pumping Unit" Sensors 16, no. 5: 685. https://doi.org/10.3390/s16050685
APA StyleLv, H., Liu, J., Han, J., & Jiang, A. (2016). An Energy Saving System for a Beam Pumping Unit. Sensors, 16(5), 685. https://doi.org/10.3390/s16050685