
Self-Locking Avoidance and Stiffness Compensation of a Three-Axis Micromachined Electrostatically Suspended Accelerometer


Abstract
:1. Introduction
2. Design and Operation of the MESA
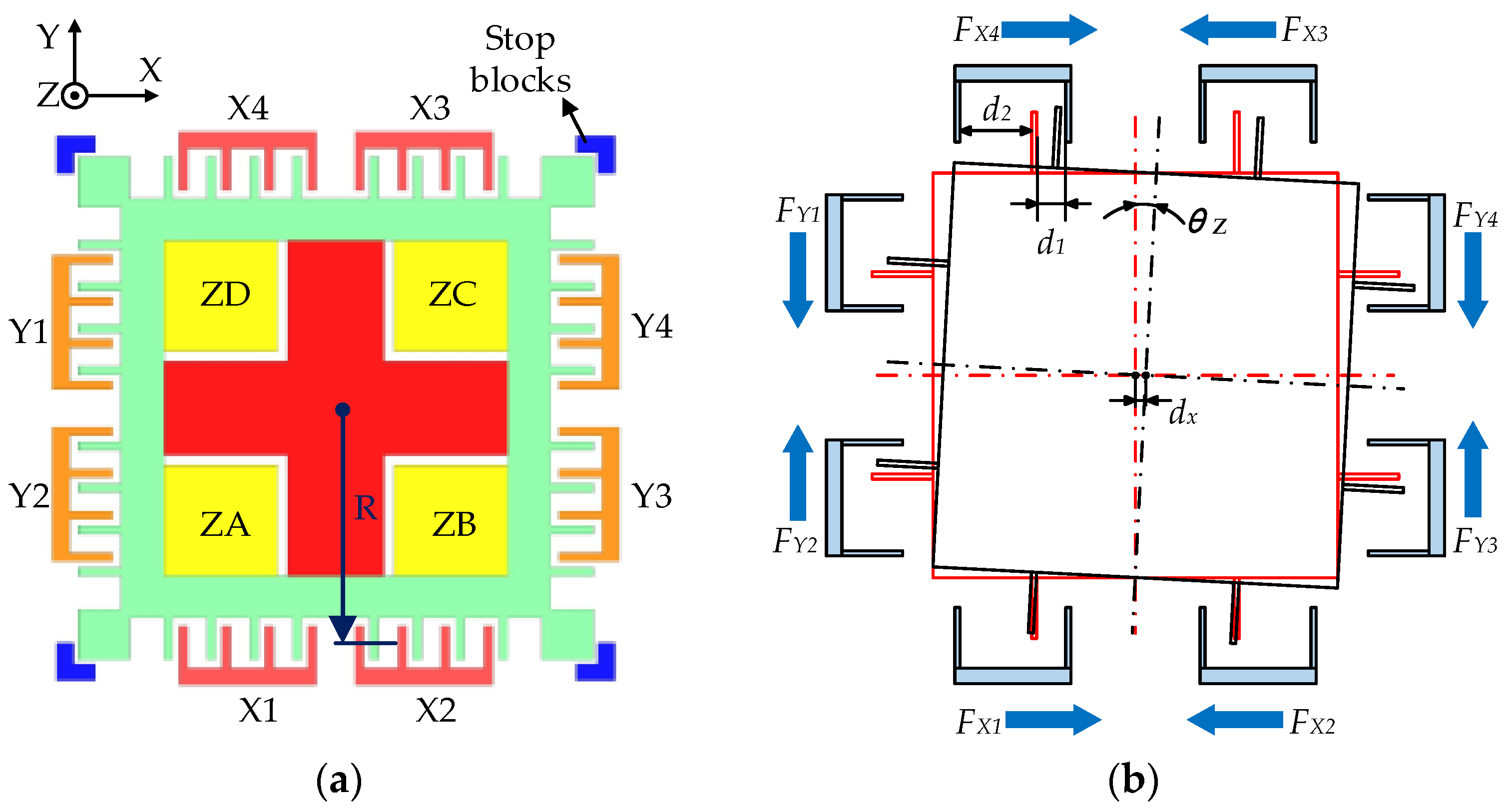
2.1. Device Structure
2.2. Capacitive Position Sensing
2.3. Electrostatic Suspension
3. Analysis and Prevention of the Self-Locking During Initial Levitation
3.1. Analysis of the Lateral Coupling Effect
3.2. A Solution to Prevent the Self-Locking Phenomenon
4. Electrostatic Suspension of the PM with Feed-Forward Compensation
4.1. Electrostatic Suspension System
4.2. Feed-Forward Compensation
4.3. Simulation of the Suspension System in Vacuum
5. Experimental Performance of the MESA
5.1. The MESA Setup
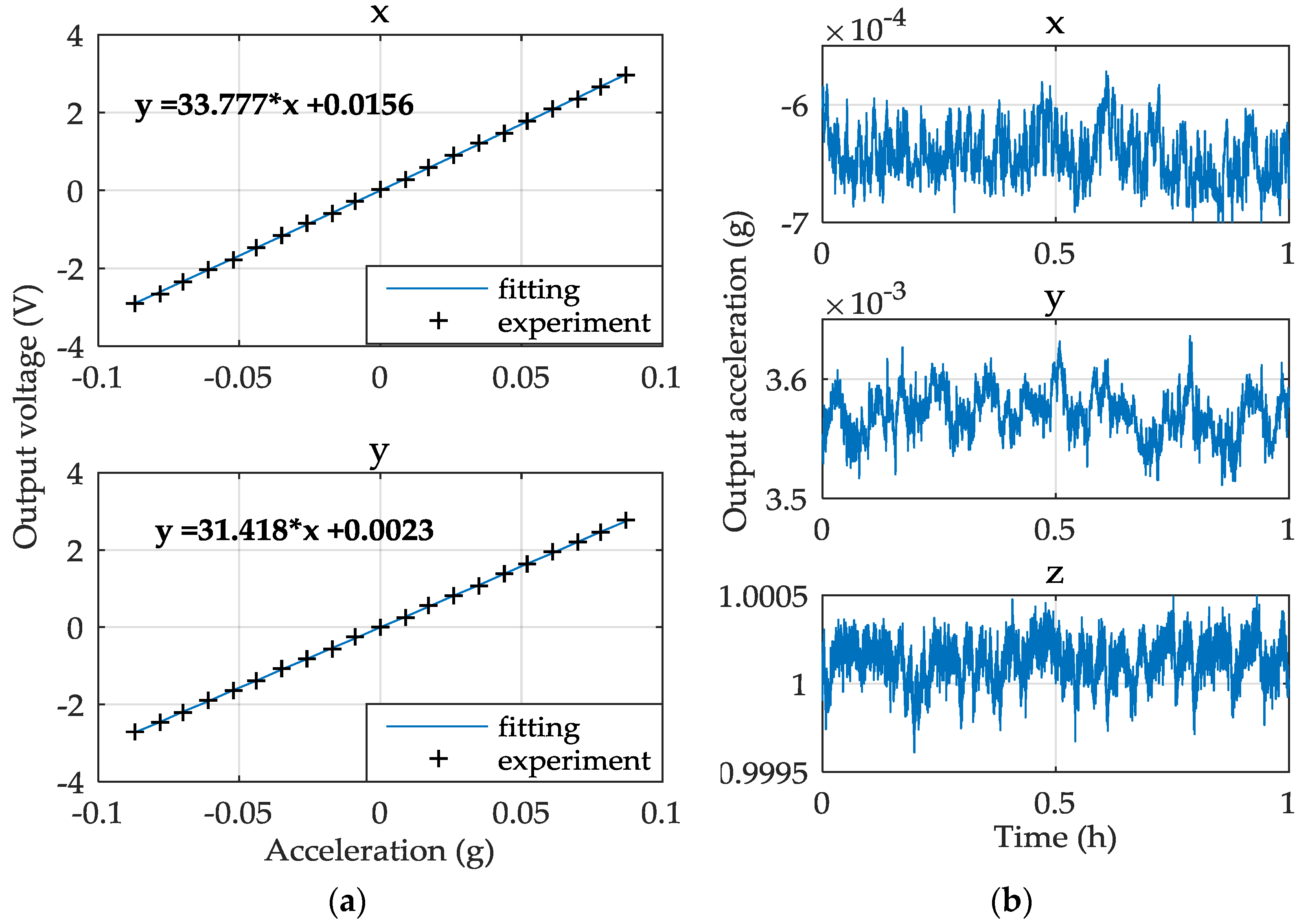
5.2. Preliminary Experiment Results
5.3. Noise Performance and Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Shaeffer, D.K. MEMS inertial sensors: A tutorial overview. IEEE Commun. Mag. 2013, 51, 100–109. [Google Scholar] [CrossRef]
- Zwahlen, P.; Dong, Y.; Nguyen, A.M.; Rudolf, F.; Stauffer, J.M.; Ullah, P.; Ragot, V. Breakthrough in high performance inertial navigation grade Sigma-Delta MEMS accelerometer. In Proceedings of the Position Location and Navigation Symposium (PLANS), IEEE/ION 2012, Myrtle Beach, SC, USA, 23–26 April 2012.
- Mougenot, D.; Thorburn, N. MEMS-based 3D accelerometers for land seismic acquisition: Is it time? Lead. Edge 2004, 23, 246–250. [Google Scholar] [CrossRef]
- Qu, H.; Fang, D.; Xie, H. A monolithic CMOS-MEMS 3-axis accelerometer with low-noise, low power dual-chopper amplifier. IEEE Sens. J. 2008, 8, 1151–1158. [Google Scholar]
- Rodrigues, M.; Foulon, B.; Liorzou, F.; Touboul, P. Flight experience on CHAMP and GRACE with ultra-sensitive accelerometers and return for LISA. Class. Quantum Gravity 2003, 20, S291–S300. [Google Scholar] [CrossRef]
- Touboul, P.; Metris, M.; Lebat, V.; Robert, A. The MICROSCOPE experiment, ready for the in-orbit test of the equivalence principle. Class. Quantum Gravity 2012, 29, 184010. [Google Scholar] [CrossRef]
- Mougenot, D.; Cherepovskiy, A.; Liu, J. MEMS-based accelerometers: expectations and practical achievements. First Break 2011, 29, 85–90. [Google Scholar]
- Jan, M.T.; Iqbal, A.; Shoaib, M. An unconventional method for exploration of oil and gas. In Proceedings of the 2012 International Conference on Emerging Technologies (ICET), Islamabad, Pakistan, 8–9 October 2012; pp. 1–5.
- Neeshpapa, A.; Antonov, A.; Agafonov, V. A Low-Noise DC Seismic Accelerometer Based on a Combination of MET/MEMS Sensors. Sensors 2015, 15, 365–381. [Google Scholar] [CrossRef] [PubMed]
- Toda, R.; Takeda, N.; Murakoshi, T.; Nakamura, S.; Esashi, M. Electrostatically levitated spherical 3-axis accelerometer. In Proceedings of the IEEE 15th International Conference on Micro Electro Mechanical Systems, Las Vegas, NV, USA, 20–24 January 2002; pp. 710–713.
- Houlihan, R.; Kraft, M. Modeling of an accelerometer based on a levitated proof mass. J. Micromech. Microeng. 2002, 12, 495–503. [Google Scholar] [CrossRef]
- Murakoshi, T.; Endo, Y.; Fukatsu, K.; Nakamura, S.; Esashi, M. Electrostatically levitated ring-shaped rotational-gyro/accelerometer. Jpn. J. Appl. Phys. 2003, 42, 2468–2472. [Google Scholar] [CrossRef]
- Nakamura, S. MEMS inertial sensor toward higher accuracy and multi-axis sensing. In Proceedings of the 4th IEEE Conference on Sensors, Irvine, CA, USA, 30 October–3 November 2005; pp. 939–942.
- Kraft, M.; Damrongsak, B. Micromachined gyroscopes based on a rotating mechanically unconstrained proof mass. In Proceedings of the 9th IEEE Conference on Sensors, Kona, HI, USA, 1–4 November 2010; pp. 23–28.
- Cui, F.; Liu, W.; Chen, W.; Zhang, W.; Wu, X. Design, fabrication and levitation experiments of a micromachined electrostatically suspended six-axis accelerometer. Sensors 2011, 11, 11206–11234. [Google Scholar] [CrossRef] [PubMed]
- Han, F.; Wang, L.; Wu, Q.; Liu, Y. Performance of an active electric bearing for rotary micromotors. J. Micromech. Microeng. 2011, 21, 085027. [Google Scholar] [CrossRef]
- Ma, G.; Han, F.; You, P.; Yan, X. Experimental study of a low-g micromachined electrostatically suspended accelerometer for space applications. Microsyst. Technol. 2015, 21, 29–39. [Google Scholar] [CrossRef]
- Han, F.; Sun, B.; Li, L.; Wu, Q. Performance of a sensitive micromachined accelerometer with an electrostatically suspended proof mass. IEEE Sens. J. 2015, 15, 209–217. [Google Scholar]
- Li, G.; Chen, G.; Zhong, J. Analysis of geophone properties effect for land seismic data. Appl. Geophys. 2009, 6, 93–101. [Google Scholar] [CrossRef]
- Laine, J.; Mougenot, D. Benefits of MEMS based seismic accelerometers for oil exploration. In Proceedings of the TRANSDUCERS & EUROSENSORS ’07, Lyon, France, 10–14 June 2007; pp. 1473–1477.
- Zhang, T.; Zhou, B.; Yin, P.; Chen, Z.; Zhang, R. Optimal Design of a Center Support Quadruple Mass Gyroscope. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Han, F.; Gao, Z.; Li, D.; Wang, Y. Nonlinear compensation of active electrostatic bearings supporting a spherical rotor. Sens. Actuators A Phys. 2005, 119, 177–186. [Google Scholar] [CrossRef]
- Li, G.; Wu, S.; Zhou, Z.; Bai, Y.; Hu, M. Design and validation of a high-voltage levitation circuit for electrostatic acceleromters. Rev. Sci. Instrum. 2013, 84, 125004. [Google Scholar] [CrossRef] [PubMed]
- Merdassi, A.; Yang, P.; Chodavarapu, V.P. A wafer level vacuum encapsulated capacitive accelerometer fabricated in an unmodified commercial MEMS process. Sensors 2015, 15, 7349–7359. [Google Scholar] [CrossRef] [PubMed]
- Josselin, V.; Touboul, P.; Kielbasa, R. Capacitive detection scheme for space accelerometers applications. Sens. Actuators A Phys. 1999, 78, 92–98. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Electrode | d1 | d2 |
|---|---|---|
| X1 | d10 − dx + x | d20 + dx − x |
| X2 | d10 + dx − x | d20 − dx + x |
| X3 | d10 + dx + x | d20 − dx − x |
| X4 | d10 − dx − x | d20 + dx + x |
| Y1/Y3 | d10 + x | d20 − x |
| Y2/Y4 | d10 − x | d20 + x |
| Case | VX1/X4 (V) | VX2/X3 (V) | VY1/Y3 (V) | VY2/Y4 (V) |
|---|---|---|---|---|
| dx = 0 | 5 | 5 | 10 | 0 |
| dx > 0 | 0 | 10 | 10 | 0 |
| dx < 0 | 10 | 0 | 10 | 0 |
| Solution | 0 | 0 | 10 | 0 |
| Parameters | X/Y | Z |
|---|---|---|
| Kv × Ks (N/m) | X: 0.7954; Y: 1.300 | 75.48 |
| f (Ns/m) | 0.0095 | 7.0 |
| Kx (N/m) | 1.371 | 16.88 |
| Kc | X: 165; Y: 105 | 180 |
| T1 (s) | 0.1 | 0.2 |
| T2 (s) | 3 | 6 |
| ws (rad/s) | 1.13 × 105 | 1.13 × 105 |
| Ka | 1 | 1 |
| Ta (s) | 1.10 × 10−5 | 1.10 × 10−5 |
| Parameters | X/Y | Z |
|---|---|---|
| Kc | X: 320; Y: 204 | 16 |
| T1 (s) | 1/100 | 1/120 |
| T2 (s) | 1/2.5 | 1/3 |
| t1 (s) | 1/850 | 1/2200 |
| t2 (s) | 1/8500 | 1/30,000 |
| Performance | X | Y | Z |
|---|---|---|---|
| Range (g) | 0.297 | 0.318 | 3.731 |
| Scale factor (V/g) | 33.777 | 31.418 | 2.681 |
| Nonlinearity (%) | 0.384 | 0.204 | \ |
| Resolution (μg) | 34.9 | 26.2 | \ |
| Noise PSD (μg/Hz1/2) | 9.3 | 10.1 | 54.6 |
| 1-h bias stability (μg) | 13.2 | 17.8 | 111.4 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, Y.; Sun, B.; Han, F. Self-Locking Avoidance and Stiffness Compensation of a Three-Axis Micromachined Electrostatically Suspended Accelerometer. Sensors 2016, 16, 711. https://doi.org/10.3390/s16050711
Yin Y, Sun B, Han F. Self-Locking Avoidance and Stiffness Compensation of a Three-Axis Micromachined Electrostatically Suspended Accelerometer. Sensors. 2016; 16(5):711. https://doi.org/10.3390/s16050711
Chicago/Turabian StyleYin, Yonggang, Boqian Sun, and Fengtian Han. 2016. "Self-Locking Avoidance and Stiffness Compensation of a Three-Axis Micromachined Electrostatically Suspended Accelerometer" Sensors 16, no. 5: 711. https://doi.org/10.3390/s16050711
APA StyleYin, Y., Sun, B., & Han, F. (2016). Self-Locking Avoidance and Stiffness Compensation of a Three-Axis Micromachined Electrostatically Suspended Accelerometer. Sensors, 16(5), 711. https://doi.org/10.3390/s16050711