1. Introduction
Rician fading model is extensively used to characterize the random fluctuations of the received signal amplitude in line-of-sight (LOS) environments [
1]. In such scenarios, the scattering waves arriving at the receiver can be split into the dominant LOS component plus a diffuse component, which accounts for the effect of the non-LOS (NLOS) propagation. The relative strength of the LOS component with respect to the NLOS one is measured by the Rician
K-factor, defined as the ratio between the powers of both components.
The estimation of the Rician
K-factor is of paramount importance in the context of wireless communications systems, as the proper system operation heavily relies on the quality of the estimation of
K [
2,
3]. As a matter of fact, a flurry of papers have addressed this estimation problem from different perspectives [
4,
5,
6,
7,
8] in the last years.
However, in some indoor and outdoor LOS environments the Rician distribution falls short to accurately modeling small-scale fading effects. This is of special relevance in the case of wireless sensor networks (WSN) deployed on the inner surface of cavities (e.g., tunnels, plane and helicopter airframes, buses, shipping containers) used to measure data for maintenance, comfort, health and security purposes [
9,
10,
11] or in vehicle-to-vehicle links [
12], or in general, machine-to-machine systems like WSN deployed inside and/or around complex structures. In all the aforementioned scenarios, field measurements show that fading in the presence of LOS components may even degenerate into a regime more severe than Rayleigh fading [
9,
10,
11,
12].
Among the different distributions in the literature which may be useful to account for this special propagation regime, the Two-Wave with diffuse power (TWDP) fading model is the preferred alternative because of its flexibility [
11] and clear physical interpretation. This fading model was first presented in [
13] as a generalization of the Rician fading model, by incorporating a second dominant LOS component with uniformly distributed phase. The effect of this new LOS component is captured through the parameter Δ, which measures the relative magnitudes of the two LOS components to one another. This model has succeeded on characterizing a wide variety of fading behaviors, from purely Rician to worse than Rayleigh fading [
14,
15], and has been considered by many authors [
16,
17,
18,
19] in order to evaluate the performance of communication systems operating under this peculiar fading condition.
Despite its relevance, the estimation of the parameters
K and Δ for the TWDP fading model has not been addressed in the literature to the best of our knowledge, except for the preliminary results in [
20] based on maximum-likelihood estimation. Thence, we aim to fill this gap by studying the problem of jointly estimating
K and Δ from the observation of the received signal envelope. Specifically, we design a moment-based estimator for the TWDP fading parameters leveraging the closed-form expressions of the moments recently proposed in [
15]. We also derive the asymptotic variance of the estimator, and compare it to the Cramer-Rao lower bound (CRB) via Monte Carlo simulations. The effect of a finite number of observations on the estimator performance is also quantified.
The remainder of this paper is structured as follows:
Section 2 introduces the main aspects of the TWDP fading model, which will be of use in the following derivations. The parameter estimation is addressed in
Section 3, whereas the CRB and the asymptotic variance of the proposed estimators are presented in
Section 4. The effect of having a finite number of observations in the estimation performance is studied in
Section 5, and the main conclusions are outlined in
Section 6.
2. TWDP Fading Model
In the TWDP fading model, the complex baseband signal
at the receiver side can be expressed as ([
13] Equation (4))
We observe two LOS components with uniformly distributed phases
(The symbol ∼ reads as
statistically distributed as.) and constant amplitudes
and
, plus a diffuse component
regarded as a complex Gaussian random variable, being
and independent. The TWDP model is fully characterized by the parameters
K, Δ and Ω defined as
The parameter
has an equivalent interpretation as in the Rician case, whereas the parameter
indicates whether the two LOS components have equal amplitude (
) or not (
), degenerating in the Rician fading model for
. The pdf of
is given by ([
13] Equation (32))
where
is the modified Bessel function of the first kind and order zero, and
. Finally, the parameter Ω corresponds to the average received signal power and hence is merely a scale factor for the model. Although we focus our study exclusively in the estimation of the K and Δ parameters, the parameter Ω is also unknown and related to
K and Δ and must therefore be estimated as well.
In ([
15] Equation (30)), the moments of the squared signal envelope
were calculated as a finite-range integral involving the Kummer confluent hypergeometric function
. Using the connection between the Kummer function and the Laguerre polynomials
[
21] [Equation 8.972], we have
Noting that the Laguerre polynomials can be expressed as [
21] [Equation 8.970]
the moments can be computed in closed-form by direct integration of Equation (
4) as
by using a simple change of variables
. Besides, the first moments of γ coincide with the first even moments of
, and can be computed from Equation (
6) as
where
is the
n-th order moment of the received signal envelope, i.e.,
. The second, fourth and sixth-order moments
,
,
are expressed in closed-form in terms of the parameters
K and Δ and Ω. We will use these expressions to design a moment-based joint estimator.
3. Moment-Based Estimation of K and Δ
Dividing Equation (8) by
and Equation (9) by
, we obtain
Using the sample moments
instead of the ensemble averages
, Equations (10) and (11) can be solved for
K and Δ resulting in moment-based estimators (A similar procedure is used in [
6] for designing moment-based estimators of the Rician K factor where a function to denote the ratio of different moments is introduced and denoted as
. The terms
and
on the left hand side of Equations (10) and (11) would correspond to
and
respectively.). In this procedure notice that the third parameter Ω is also being estimated when using
instead of
as indicated in Equation (7). Solving Equation (10) for Δ and substituting it in Equation (11) results in the cubic polynomial equation on
with coefficients
The closed-form solution of a cubic polynomial results in the estimator
with
Note that, while Equation (
12) has three possible solutions, only one of them yields a valid estimation of
K (i.e., real and positive); this is the solution stated in Equation (14). Plugging the estimate of
K in Equation (10) yields a quadratic polynomial in Δ, for which the following estimator is obtained:
where the positive-valued solution has been selected, as
by definition.
4. Asymptotic Variance and Cramer-Rao Bound
To assess the performance of the proposed estimators, we will first calculate the asymptotic variance. Then, we will compare it to the CRB bound, which determines the minimum achievable variance of any unbiased estimator.
It is well-known that for any moment-based estimator, as the number of independent and identically distributed (i.i.d.) observations
N increases, the estimator bias tends asymptotically to zero. Similarly, in this situation the estimator variance tends to vary proportionally to
(it is a
-consistent estimator). In our problem, the proposed estimators are a function of three sample moments, i.e.,
and
where the function
is obtained by substituting Equations (
13) and (
15) in Equation (14) and the function
is obtained by substituting Equation (14) in Equation (16). The asymptotic variance for the estimation of
K is given by [
22] [Equation 9.16]:
where
is the vector of derivatives of
K with respect to each sample moment, evaluated at the corresponding statistical moment value, i.e.,
and
Σ is the 3 × 3 covariance matrix of the ensemble averages whose entries are defined as
. It can be easily shown that
Evaluation of Equation (
19) requires the use of all the even order moments up to order 12. The first three moments are shown in Equations (7)–(9). Closed-form expressions for
and
can be easily obtained by evaluating Equation (
6), and are shown in
Appendix A. Replacing
K by Δ in Equations (17) and (18) yields the corresponding expression for
.
The Cramer-Rao lower bound is directly related to the Fisher Information Matrix (FIM), which will be denoted by
with entries
where
is the parameter vector to be estimated. For i.i.d. observations the FIM matrix is a 3 × 3 matrix with
where
N is the number of observations and
is the TWDP pdf in Equation (
3).
The CRBs for the estimation of
K and Δ will be denoted here as
and
respectively. According to [
22] , these can be expressed as the elements (1,1) and (2,2) of the inverse FIM matrix, respectively, i.e.,
and
. See that the CRBs decrease with the number of observations as
. In order to compute the FIM entries we must first obtain the derivatives in Equation (20), and then perform numerical integration. As stated before, although we are interested in the estimation of
K and Δ, the parameter Ω must likewise be estimated and accounted for in the CRB calculation. Whether Ω is known or not indeed affects the CRB, but the specific value of Ω is irrelevant because the CRB is scale invariant.
Before presenting the results for CRB and AsV, we would like to remark an important aspect relative to normalization. In the context of moment-based estimators it is common (see Figure 2 in [
6]) to normalize the AsV and the CRB by
N because the (asymptotic) behavior of the proposed estimator when N is high can be seen in one single figure and compared to the CRB. Therefore in the sequel, results for both the CRB and the AsV will be normalized with respect to
N. A further normalization with respect to the estimated parameter true value will be carried out in order to have bounds on
relative errors (instead of
absolute errors) which give better information of the goodness of the estimation. Finally, it is usual in the literature to represent the bound on the standard deviation of the error instead of on the variance. Hence, the square root of CRB and AsV will be considered. For the sake of compactness, in the text we will refer to the square root of the CRB for the estimation of K, normalized to both
K and
N as sqrt-normalized
which stands for
and the same holds for the sqrt-normalized
,
and
.
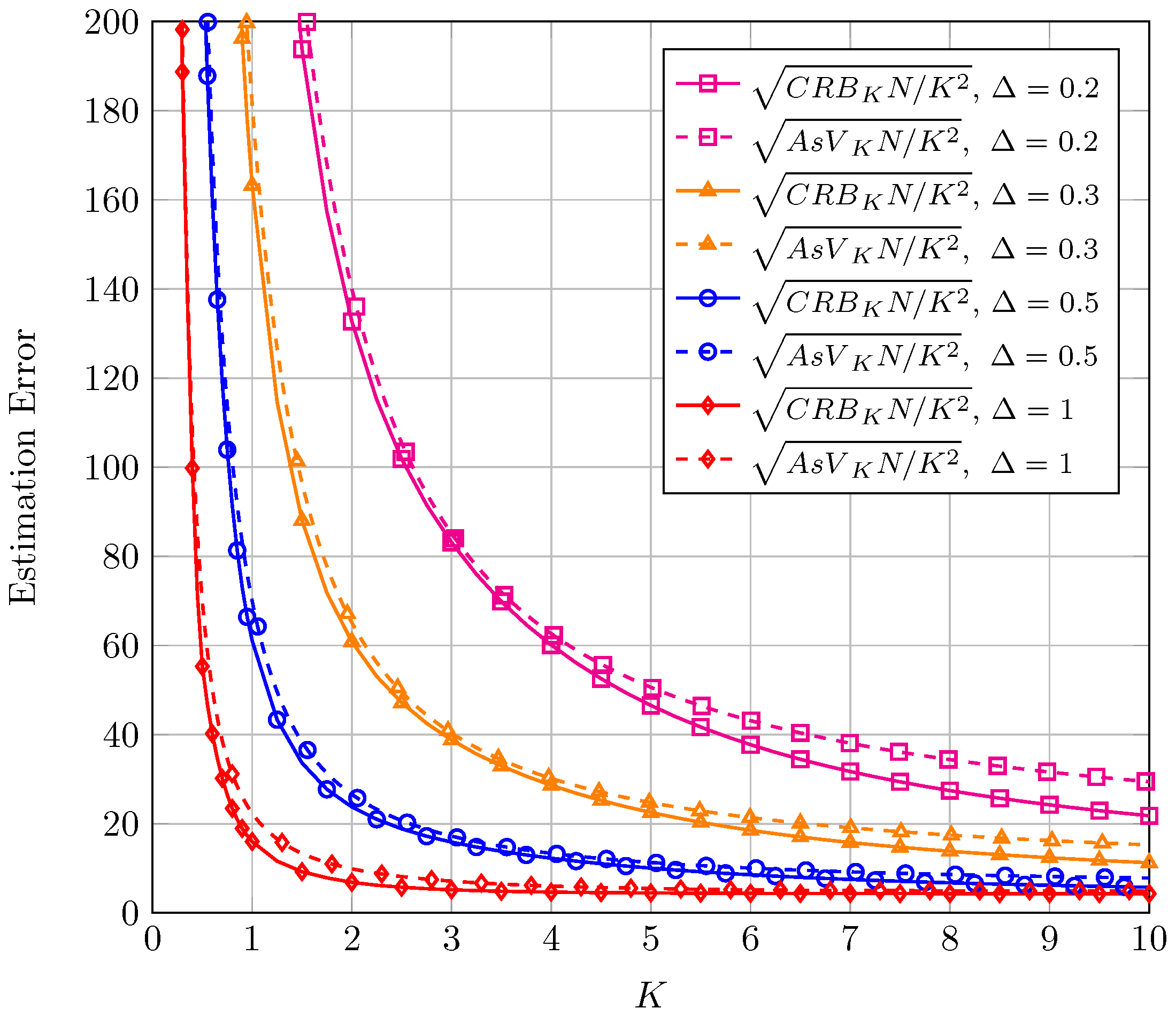
In
Figure 1, the sqrt-normalized
and the sqrt-normalized
are plotted as a function of
K. Different plots correspond to different values of the unknown parameter Δ. Focusing first on the CRB, see that the sqrt-normalized
grows as Δ decreases. This means that the error bound in estimating the ratio of the LOS components power to the diffuse components power is higher when there is only one LOS component. The estimation can improve as the two LOS components become of similar magnitude. See also that the error bound decreases drastically as
K increases from 0 to a moderate value (around
for
); this is, as the power of the diffuse components diminishes. Finally, for larger
K the error converges to a constant value as
K goes to infinity. The value of the sqrt-normalized
is remarkably close to the sqrt-normalized
for the entire considered range of parameters. This means that the proposed estimator of the
K parameter is almost asymptotically efficient.
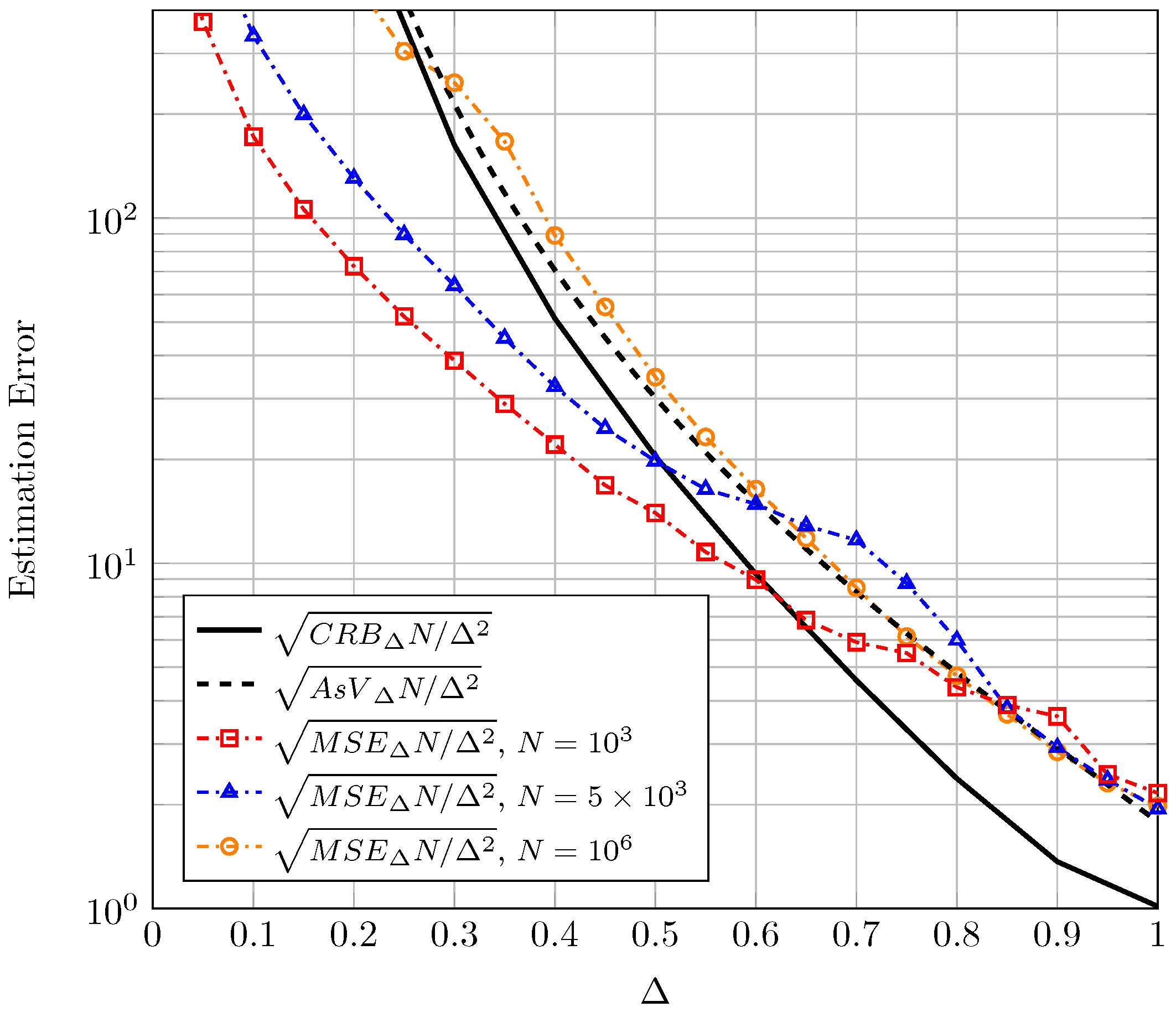
Proceeding in an analogous manner, in
Figure 2, we have represented the sqrt-normalized
and the sqrt-normalized
as a function of Δ. Different plots correspond to different values of the unknown parameter
K. With regard to the sqrt-normalized
, we notice once again that the estimation improves when
K grows large. We also observe that for a given
K, the sqrt-normalized
increases as
; this implies that it is difficult to determine the relative amplitudes of the two LOS components as one of them vanishes. The converse can be argued when both tend to be equal (i.e.,
). We also see that the values of the sqrt-normalized
are relatively close to the sqrt-normalized
for the range of parameters analyzed, but not as close as when estimating
K.
5. Effect of a Finite Number of Observations
The performance of the proposed estimators for finite
N is studied by resorting to Monte-Carlo simulations. For every fixed pair of
K and Δ, we have generated 500 sets of
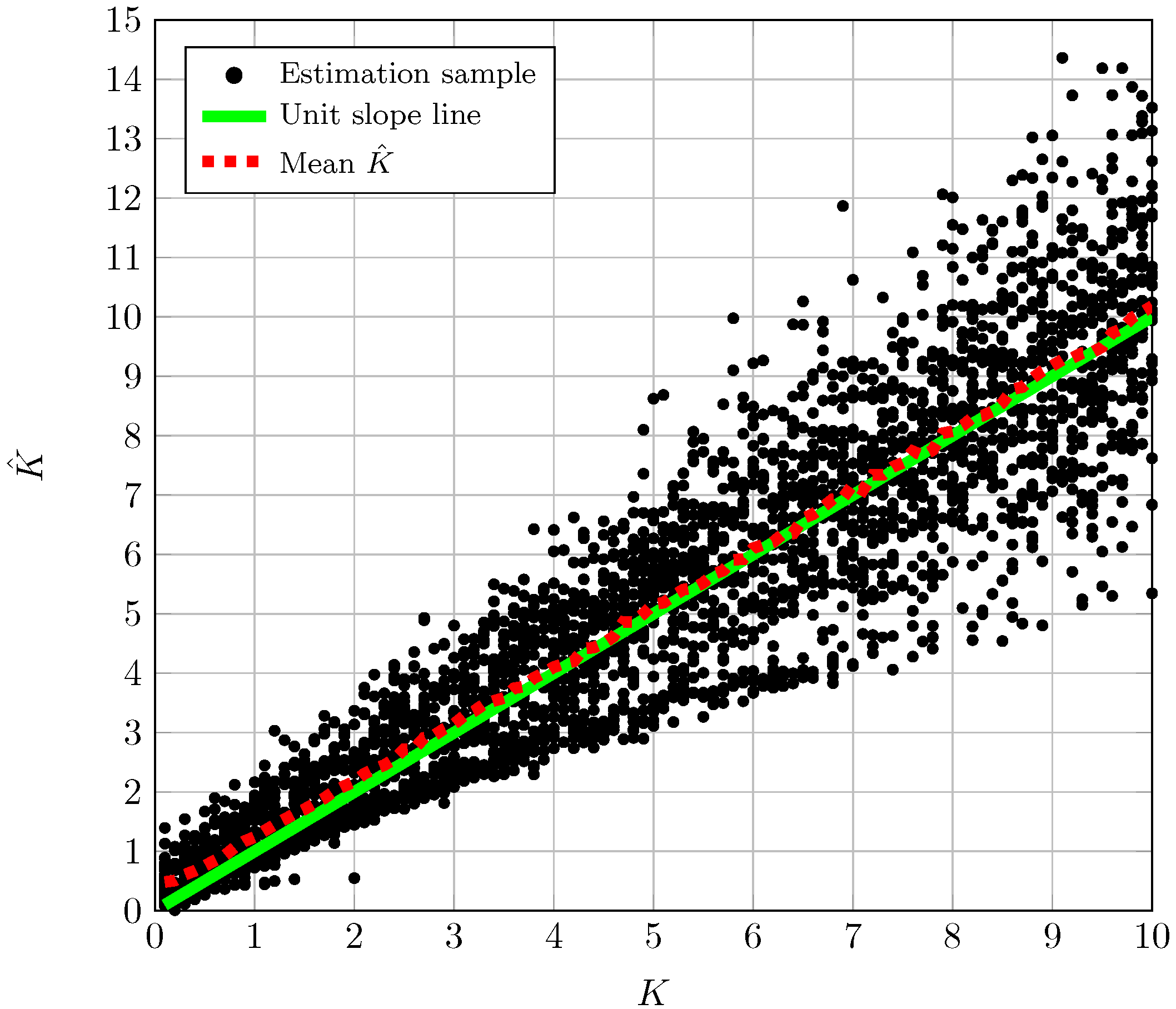
N i.i.d. realizations of the TWDP random variable. As an initial sanity check,
Figure 3 shows the estimated
K using Equation (14) vs. the true
K value for a fixed value of Δ. The dashed line on the graphic results from averaging the estimate over the trials while the solid lined corresponds to the unit slope line that serves as a reference. From this type of plot we can extract qualitative results about the behavior of the estimators. As can be seen in
Figure 3, the estimator
shows a reduced bias for the range of
K values shown in the figure. See also that the dispersion of the estimated values grows with growing
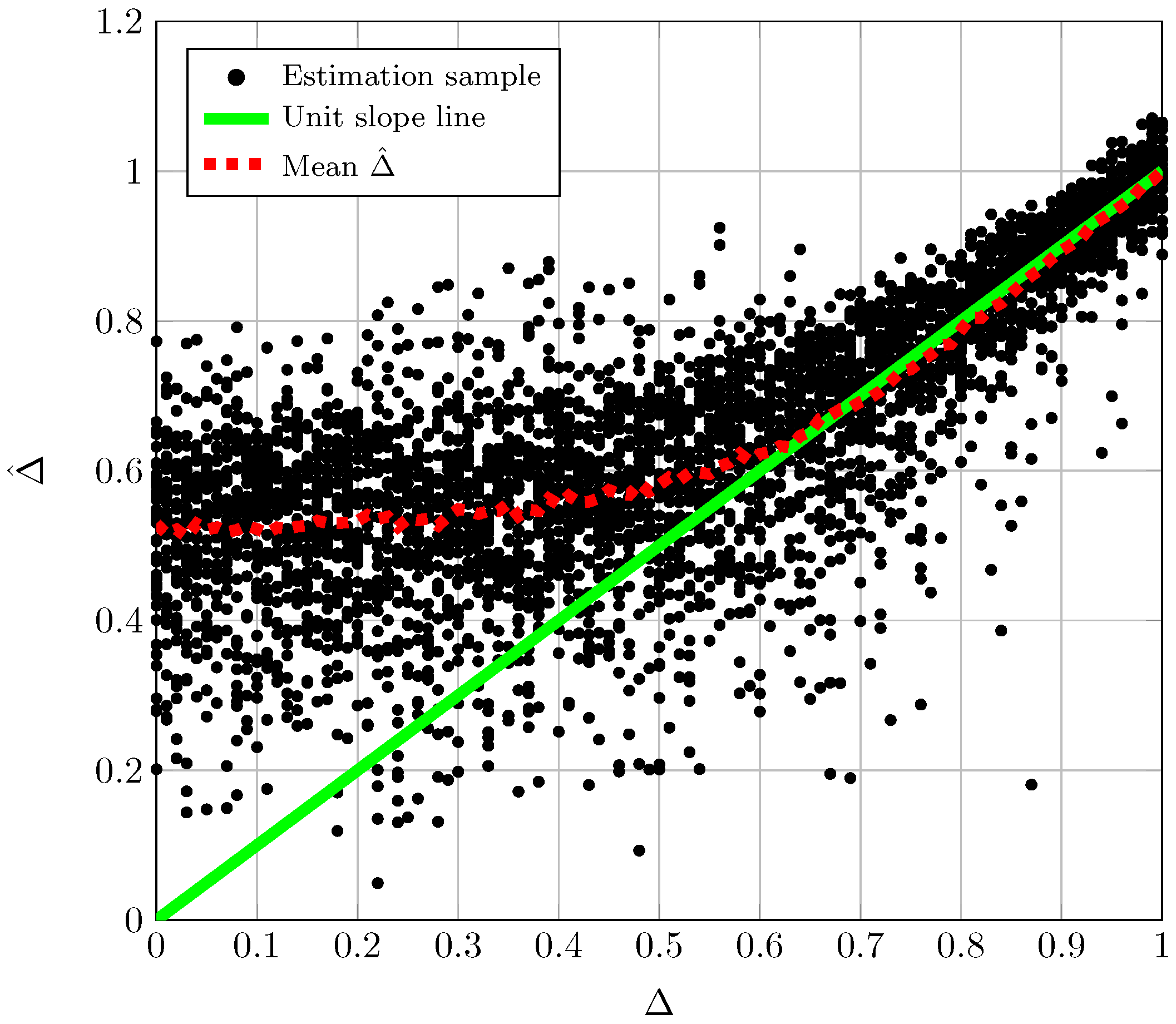
K. Accordingly,
Figure 4 shows the estimated Δ using Equation (16) vs. the true Δ value for a fixed value of
K. In this case the estimator shows a growing bias and dispersion of values as Δ decreases.
In order to perform a quantitative analysis of the estimators performance we have computed the sample mean squared errors and where with and where is defined in an analogous way. The double normalization used with the CRB and AsV is also applied to the MSE, and hence term sqrt-normalized denotes the square root of the MSE in the estimation of K normalized to both K and N and corresponds to . The same holds for sqrt-normalized .
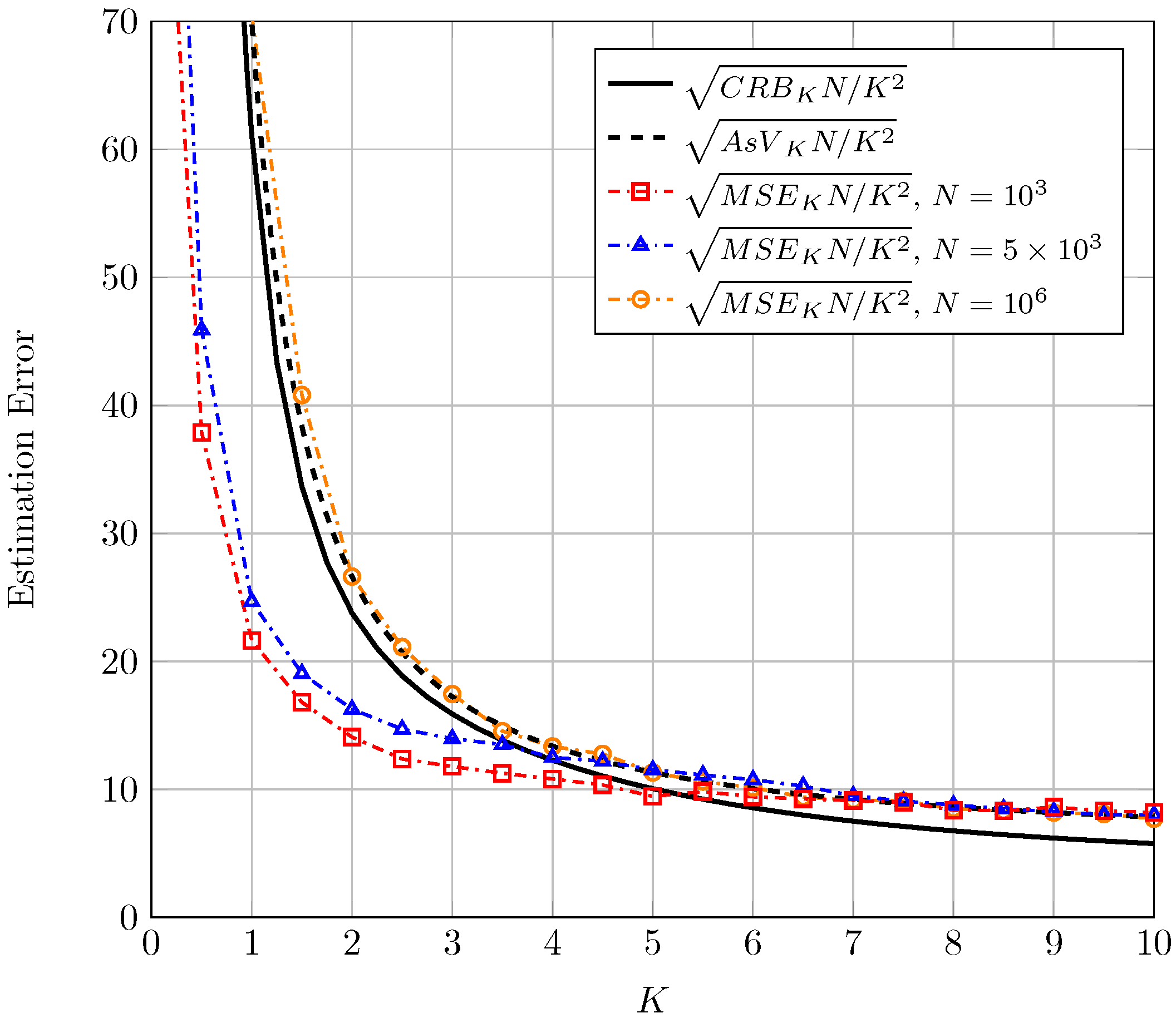
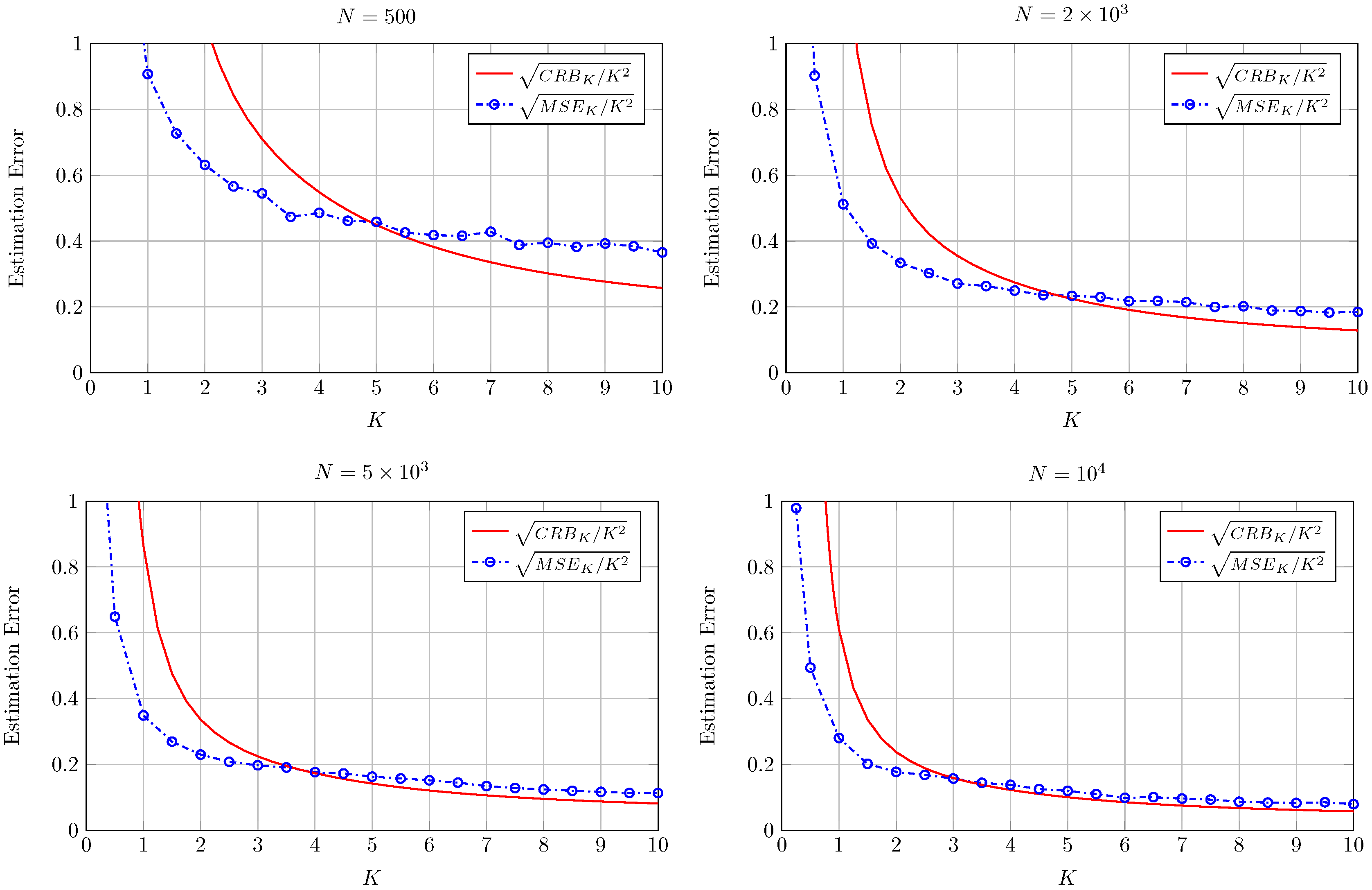
In
Figure 5, the sqrt-normalized
using Equation (14) is plotted as a function of
K for
and different values of
N. Accordingly, in
Figure 6, the sqrt-normalized
using Equation (16) is plotted as a function of Δ for
and different values of
N. In both figures the corresponding sqrt-normalized CRB and AsV have been included as a reference.
See that for a very high number of observations (
) the sqrt-normalized MSE is close to the sqrt-normalized AsV in both cases, as expected. As
N decreases, the sqrt-normalized MSE falls below the sqrt-normalized CRB for values of
in
Figure 5 and for values of
in
Figure 6. The reason for this is that the bias of the proposed estimators grows when decreasing
N. It is well-known that the CRB sets a limit on the variance of unbiased estimators. However, in case the estimators are biased the CRB is not practical and the MSE (which accounts for both variance and bias) may take a lower value. This behavior is also observed in the moment-based Rice parameter estimators proposed in the literature for values of the Rician parameter
K close to zero and finite
N (e.g., see Figure 5 in [
6]). Although a CRB and a MSE bound for biased estimators can be also resorted [
23], they are impractical since they require an
a priori choice of the bias gradient. Although not explicitly included in
Figure 5 and
Figure 6 a similar behavior is observed for other values of
K and Δ. Due to the double normalization applied to the sqrt-normalized MSE, care must be taken when interpreting the relative values of the different sqrt-normalized MSE curves shown in
Figure 5 and
Figure 6. For instance, in
Figure 6, the sqrt-normalized MSE curve corresponding to
takes a higher value than that of
in most of the range where Δ varies. De-normalizing the sqrt-normalized MSE with respect to
N reveals that the sqrt-normalized MSE with
is lower than that with
for the whole range of Δ; i.e., the estimation error is in fact lower for higher number of observations, as expected.
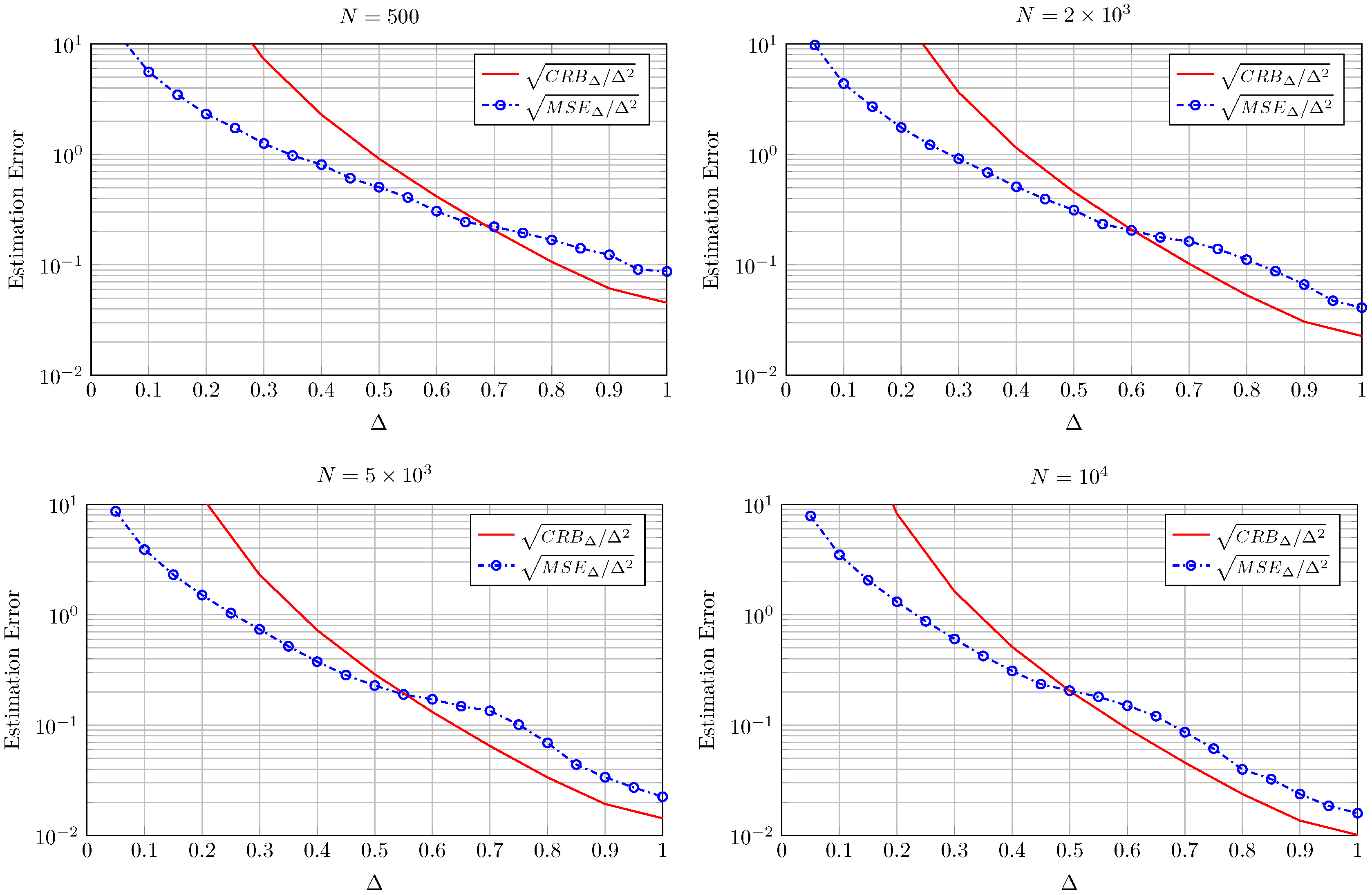
This fact is explicitly shown in
Figure 7 and
Figure 8 where in this case both the CRB and MSE are not normalized by
N. See how both the CRB and the MSE decrease as
N grows from 500 to
for all the values of
K and Δ in
Figure 7 and
Figure 8, respectively.


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







