In the oil industry, borehole trajectories needs to be measured accurately in drilling engineering and geological work [
1,
2]. Measurement-while-drilling (MWD) surveying systems provide the position and the orientation of the bottom hole assembly (BHA) in real-time during drilling. Present MWD surveying systems consist of three-axis accelerometers and three-axis magnetometers mounted inside special non-magnetic drill collars [
3]. However, using magnetometers has a deleterious effect on the overall accuracy of the surveying process, since the drill string components contain magnetic interference, geomagnetic influences, and downhole ore deposits, which are randomly located and cannot be predicted [
1,
2]. This magnetic interference effect is reduced, but not eliminated, by utilizing long lengths of non-magnetic drill collars, but this solution increases the drilling technology costs due to the relatively high cost of these non-magnetic materials [
4]. Meantime, the MWD surveying system is not capable of monitoring the drill bit in time since the MWD needs to be installed at least 15 m behind the drill bit due to the non-magnetic drill collar use [
1].
As the inertial navigation system (INS) is free from magnetic interference effects, it has been proposed as an alternative to magnetometer-based MWD surveying [
5,
6,
7]. Many scholars have done a lot of research work about gyroscope-based MWD. Reference [
8] proposed a novel non-linear error model (NNEM) to reduce the propagated errors under large-angle attitude error conditions. Meantime, the particle filter (PF) and Kalman filter (KF) were compared. In [
9] an in-drilling alignment (IDA) method was proposed to improve the surveying accuracy. References [
10,
11,
12] studied the error models for gyroscope-based MWD. An alternative method is micro-electro-mechanical Systems (MEMS) gyroscope-based INS [
1,
8,
9]. The advantage of MEMS gyroscopes is that they are very small, and it can easily meet the size requirements. However, MEMS gyroscopes have limited practical application due to their low precision compared with other gyroscopes. Fiber optic gyroscopes have many advantages over MEMS gyroscopes, such as shock and vibration force resistance, immunity from magnetic interference, and high reliability. These advantages make FOG-based inertial measurement units (IMUs) perfect candidates for MWD surveying systems, and this has attracted much interest [
6,
7,
13]. Two limiting factors should be taken into account when applying FOG-based IMU in MWD: (1) the instrument size limitation and (2) the INS unlimited error growth. To accommodate the size, a single FOG system and dual FOG system combined with three orthogonal accelerometers has been proposed [
5,
13]. The single FOG system needs to stop drilling to keep static for surveying, thus continuous surveying cannot be realized. Dual-axis FOG system provides continuous surveying for the near vertical and the radical section of the well [
4], while it cannot realize the entire attitude while surveying. Using a completely FOG-based IMU is a suggested alternative to the dual-FOG approach. On the other hand, it is clearly known that the position, velocity, and attitude errors continuously grow if there is no external observation to update the INS. For long-term and high accuracy surveying of FOG-based MWD, the zero velocity update (ZUPT) method is adopted [
14]. Nevertheless, previous research demonstrated that ZUPT is time consuming [
15]. As an alternative to ZUPT, the in-drilling alignment (IDA) method has been previously proposed and theoretically demonstrated as an approach for limiting the error growth [
9,
16]. However, the IDA method cannot be used easily, because of both the IDA method and the downhole drilling condition complexities.
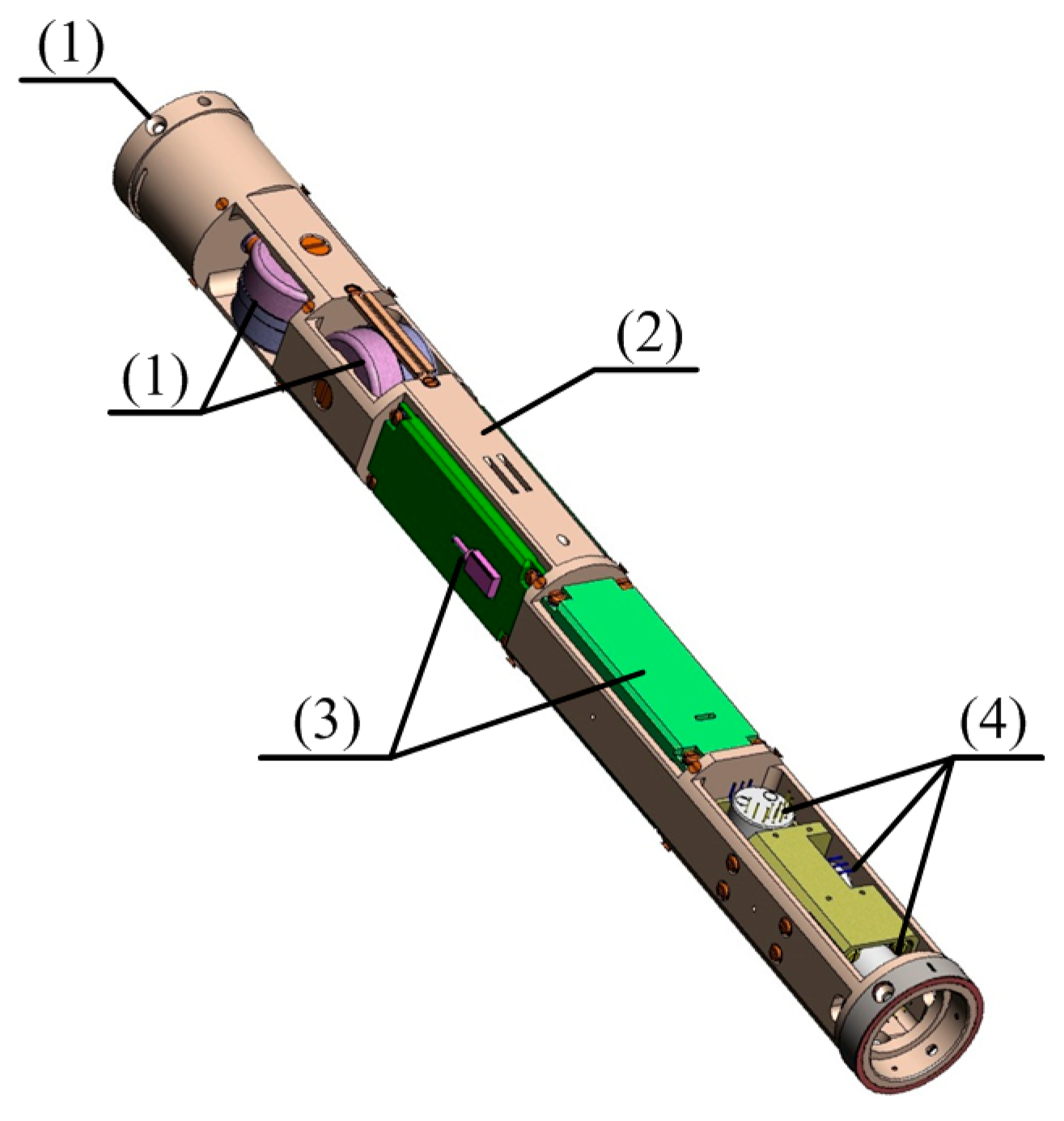
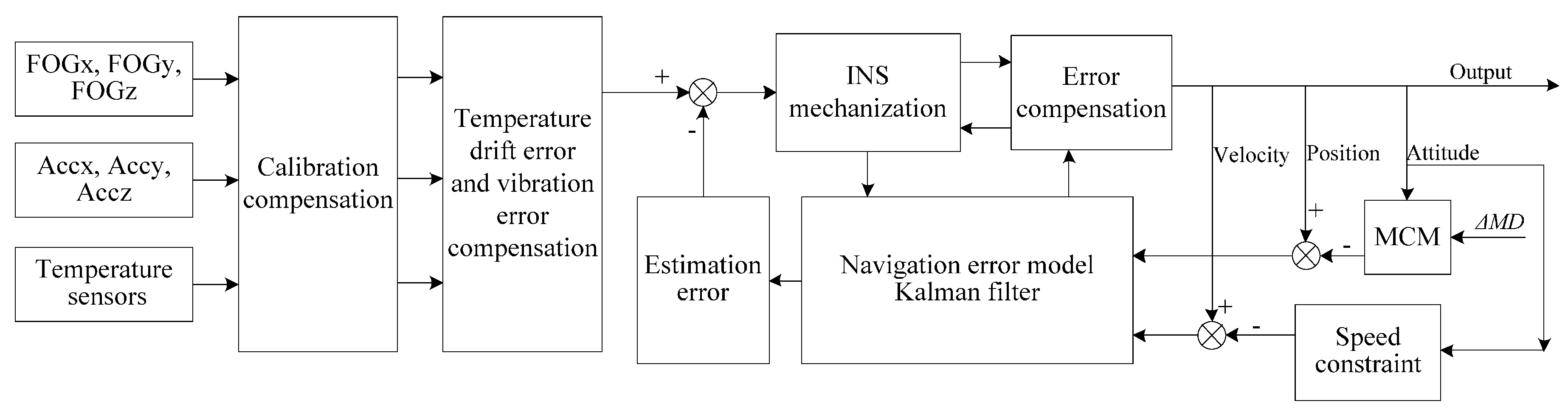
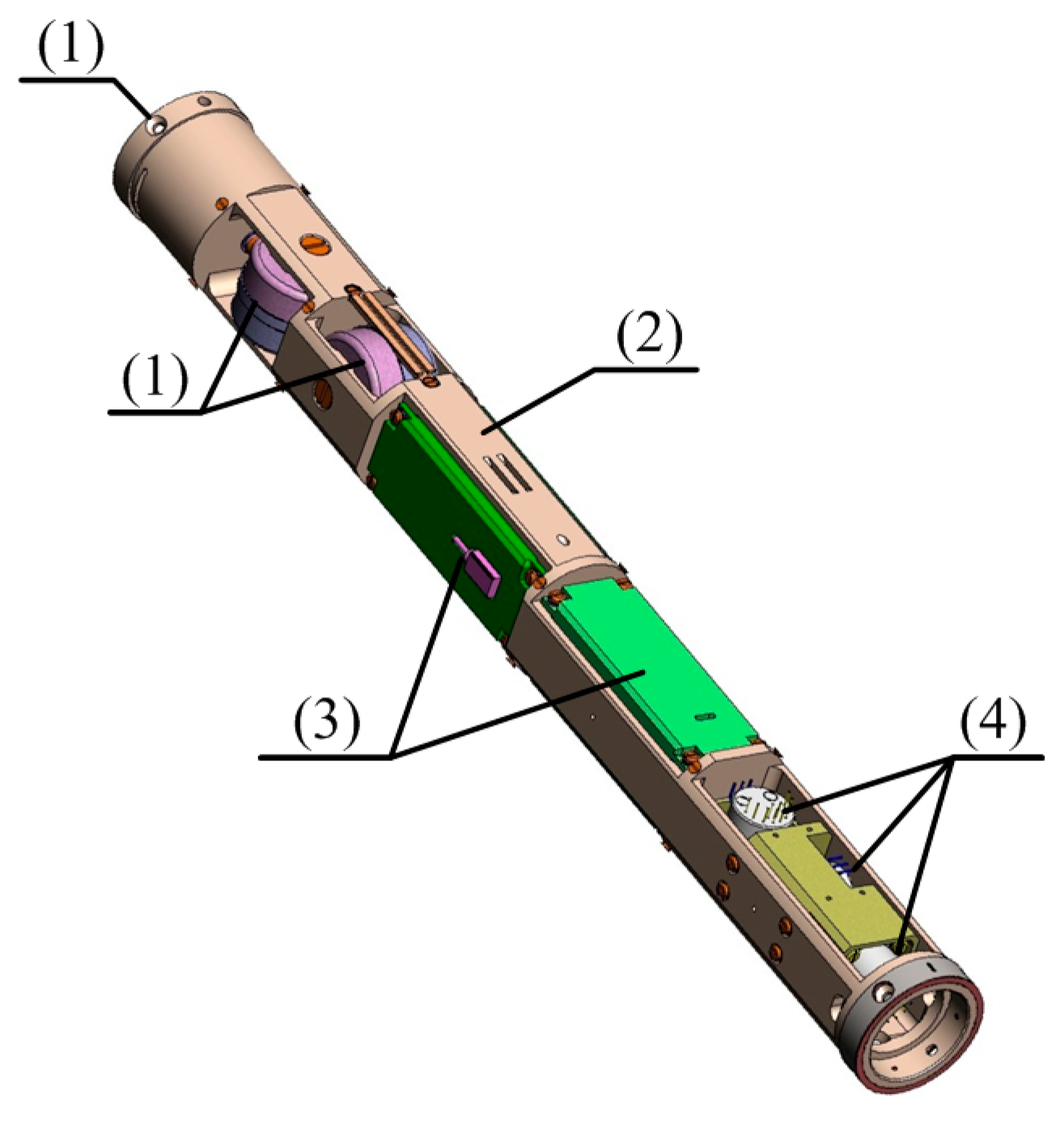
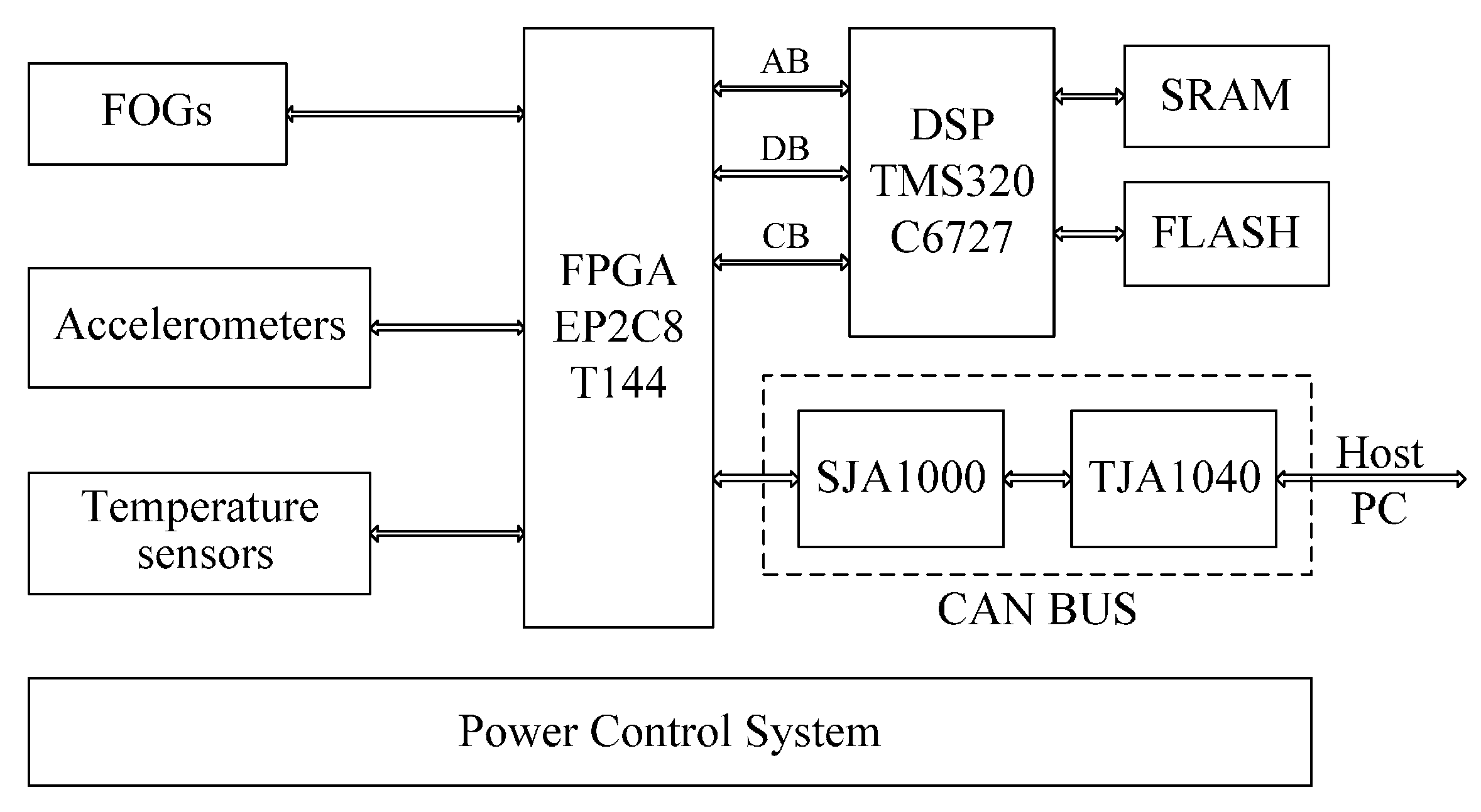
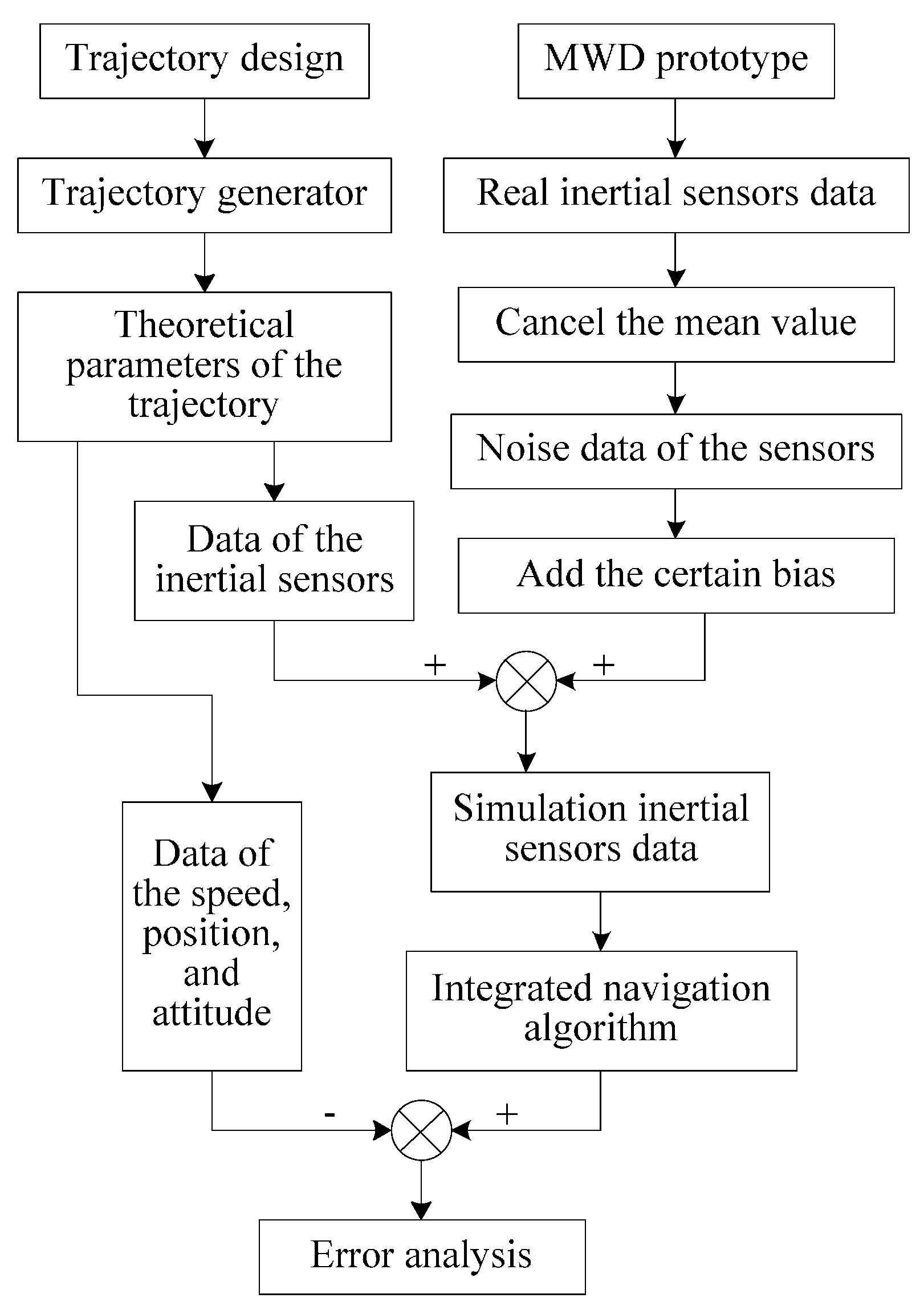
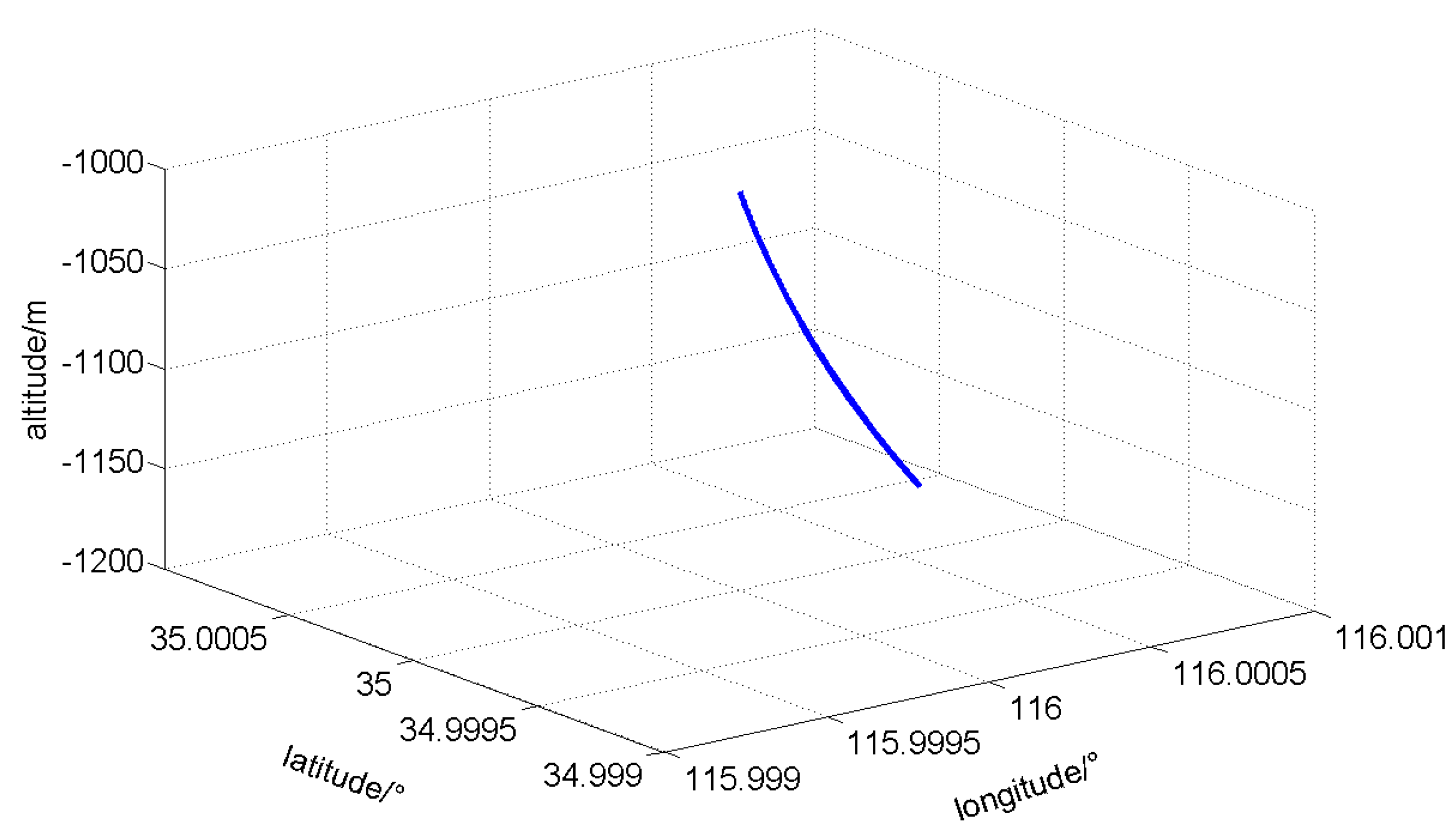
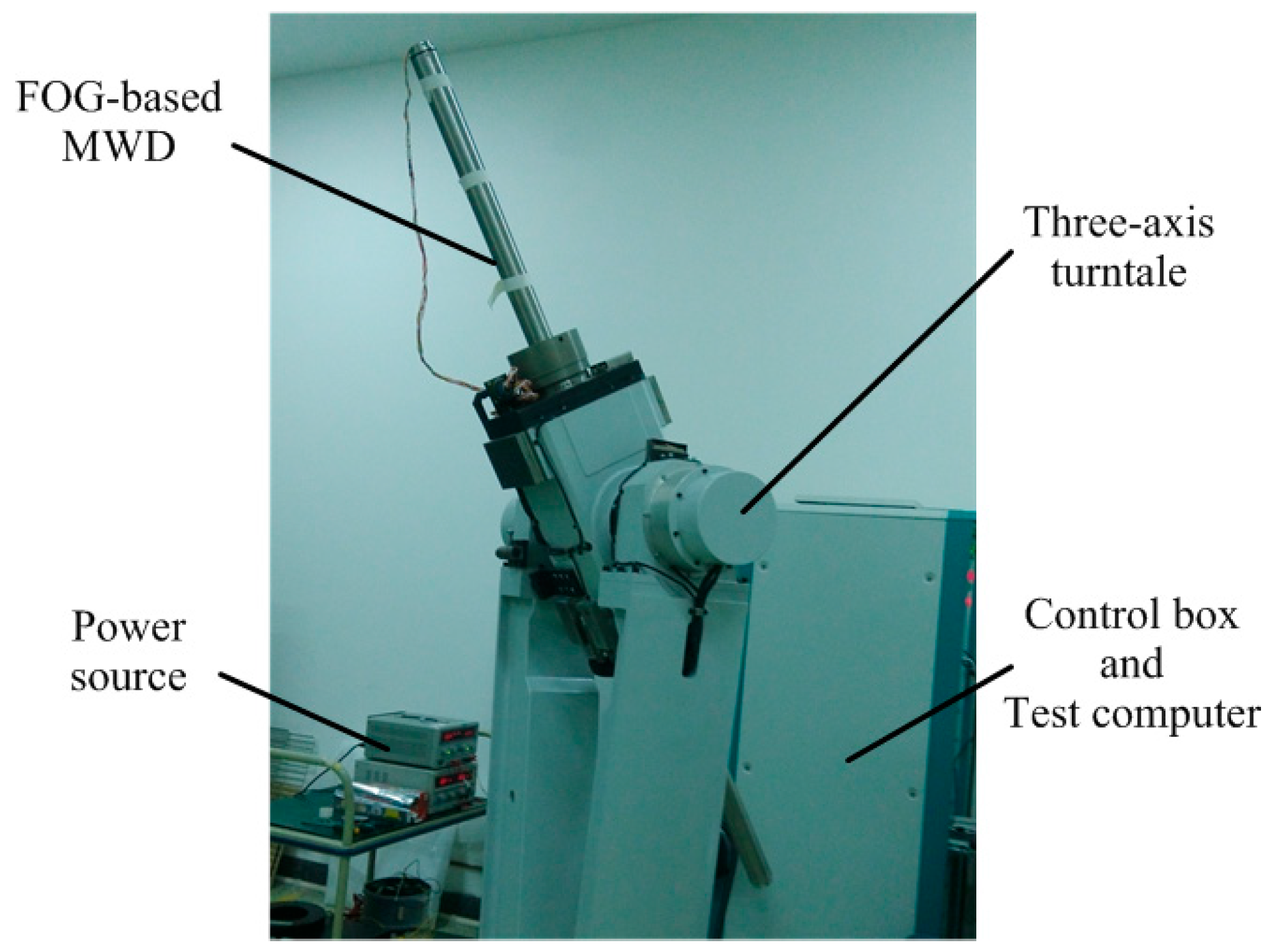
From the above analysis, the main motivation of this paper is to develop a FOG-based MWD surveying system for well logging by using tri-axial FOG and tri-axial accelerometer. Furthermore, to suppress the INS error growth, a long-term surveying method is proposed based on the drilling feature. Finally, the semi-physics simulation is conducted to verify the proposed method based on the FOG-based MWD prototype.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}