A Methodology for the Design of Application-Specific Cyber-Physical Social Sensing Co-Simulators




Abstract
:1. Introduction
2. State of the Art
2.1. Recent Proposals on CPSS
2.2. State-of-the Art on Co-Simulation
2.3. CPSS Co-Simulation
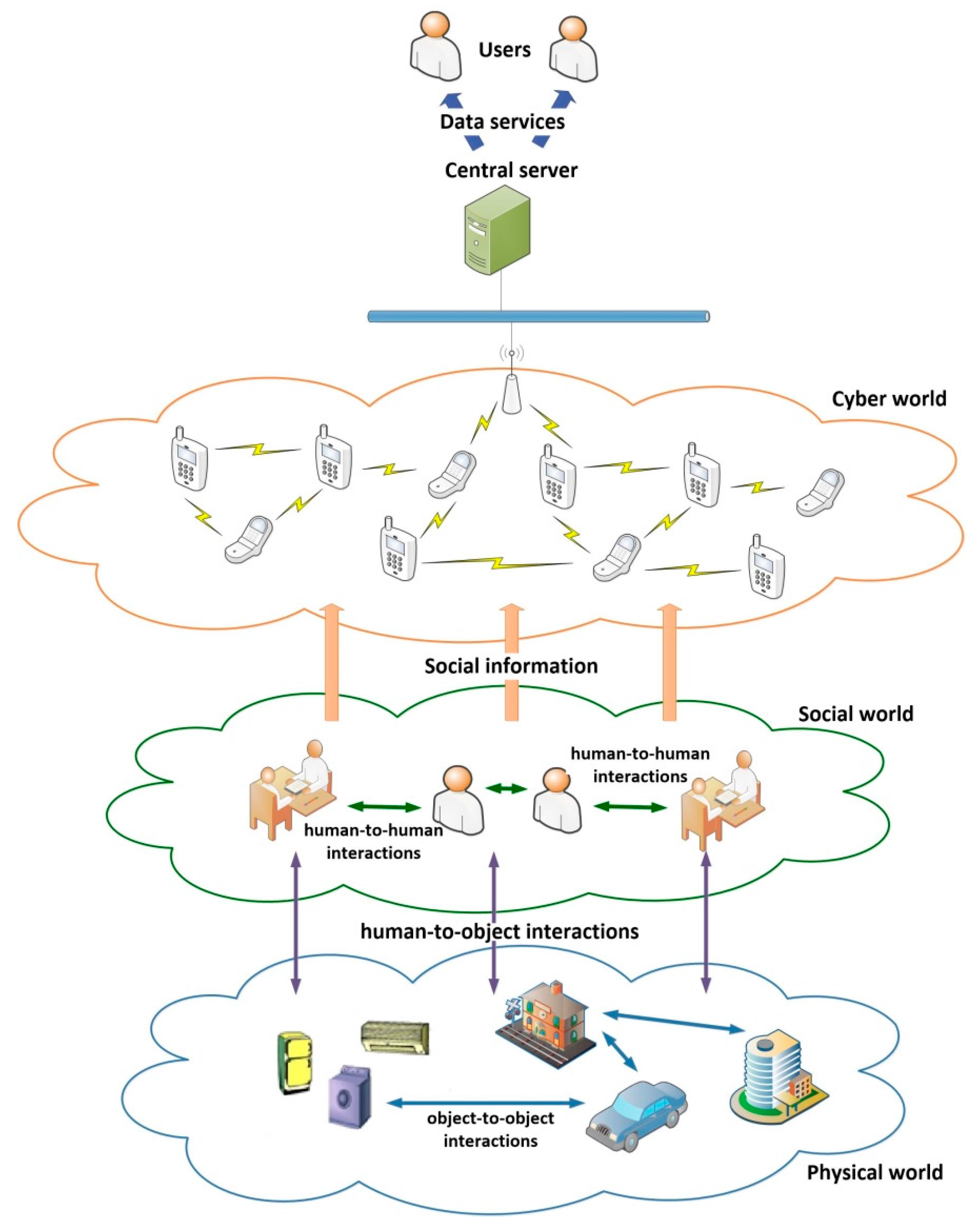
2.4. Social, Physical and Network (Cyber) Simulation
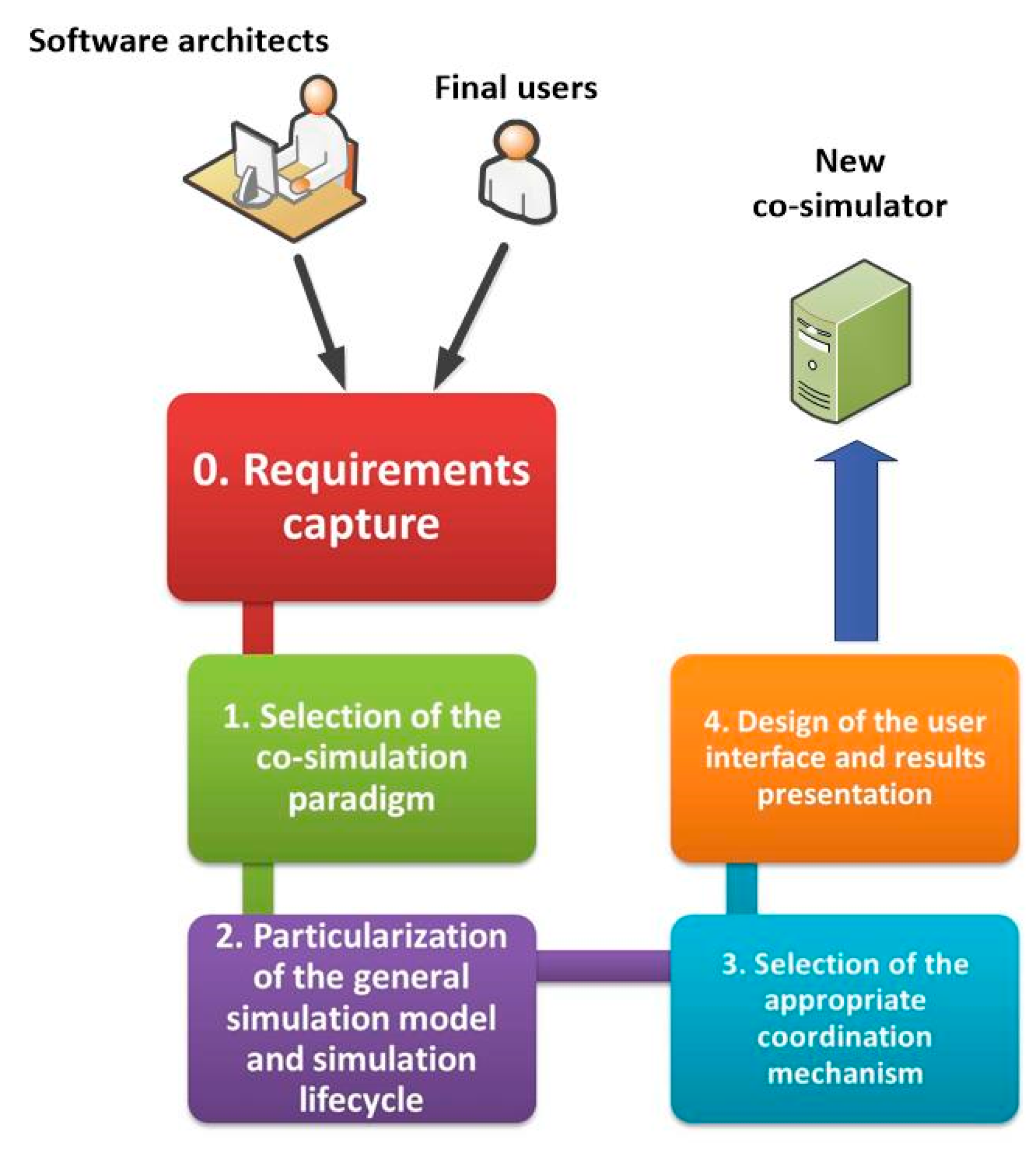
3. Methodology for the Implementation of Application-Specific Cyber-Physical Social Sensing Co-Simulators
- Selection of the co-simulation paradigm
- Particularization of the general simulation model and simulation lifecycle
- Selection of the appropriate coordination mechanism
- Design of the user interface and results presentation
- The first step addresses the “Data Flow and Concurrency”. Different paradigms in order to parallelize and manage the data flow among the domain specific simulation tools are presented and different criteria to select among them depending on the situation are provided.
- Challenges related to the “Modeling language” and “System Topology representation” are addressed during the second step. A basic simulation model is proposed, and indications to adapt it to the particular scenario under study are provided. An identical process is followed with the simulation lifecycle.
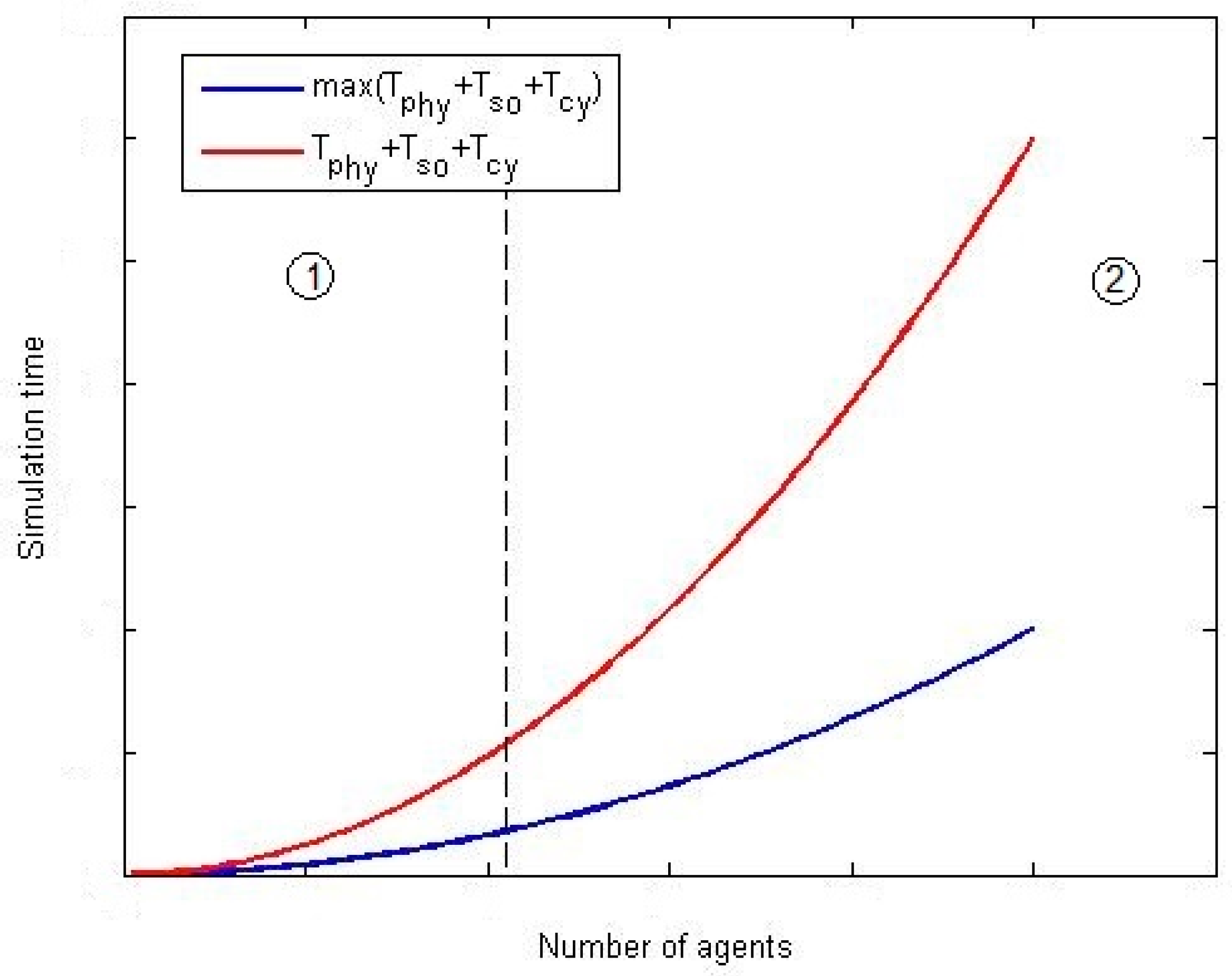
- “Time management” and “System Scalability” are investigated in the third step. Different options to coordinate the different time representation and simulation speeds are studied. Besides, depending on the desired future system scalability and the scenario under study, different criteria to select the most appropriate management technique are provided.
- Finally, the fourth step is focused on “Tool heterogeneity”. In order to homogenize the interaction with the proposed co-simulator as much as possible, different ideas about the possibilities for user interfaces are provided and analyzed.
3.1. Previous Phase: Final Users’ Requirements and Characteristics Capture
- Flexibility. The adaptation level of the proposed solution to new usages, utilization modes, technological instruments, etc. must be determined. For example, if required, the simulator should be able to be applied to new scenarios.
- Modularity. Depending on the expected use for the co-simulator, the tool should include several modules independently handled. For example, if applying many changes in the simulator structure during its operation is desirable, modules and components should be easily added and removed without affecting any other part of the tool (total modularity).
- Scalability. The upper limit for the simulation scenario complexity should be defined. For example, the maximum admissible number of agents in a particular scenario, or the level of complexity of the agent’s behavior should be determined.
- Accuracy. Users should be able to select the desired accuracy level. For example, users must indicate the maximum time without updating the simulation (which allows calculating the required time step at the implementation stage, see Section 3.4)
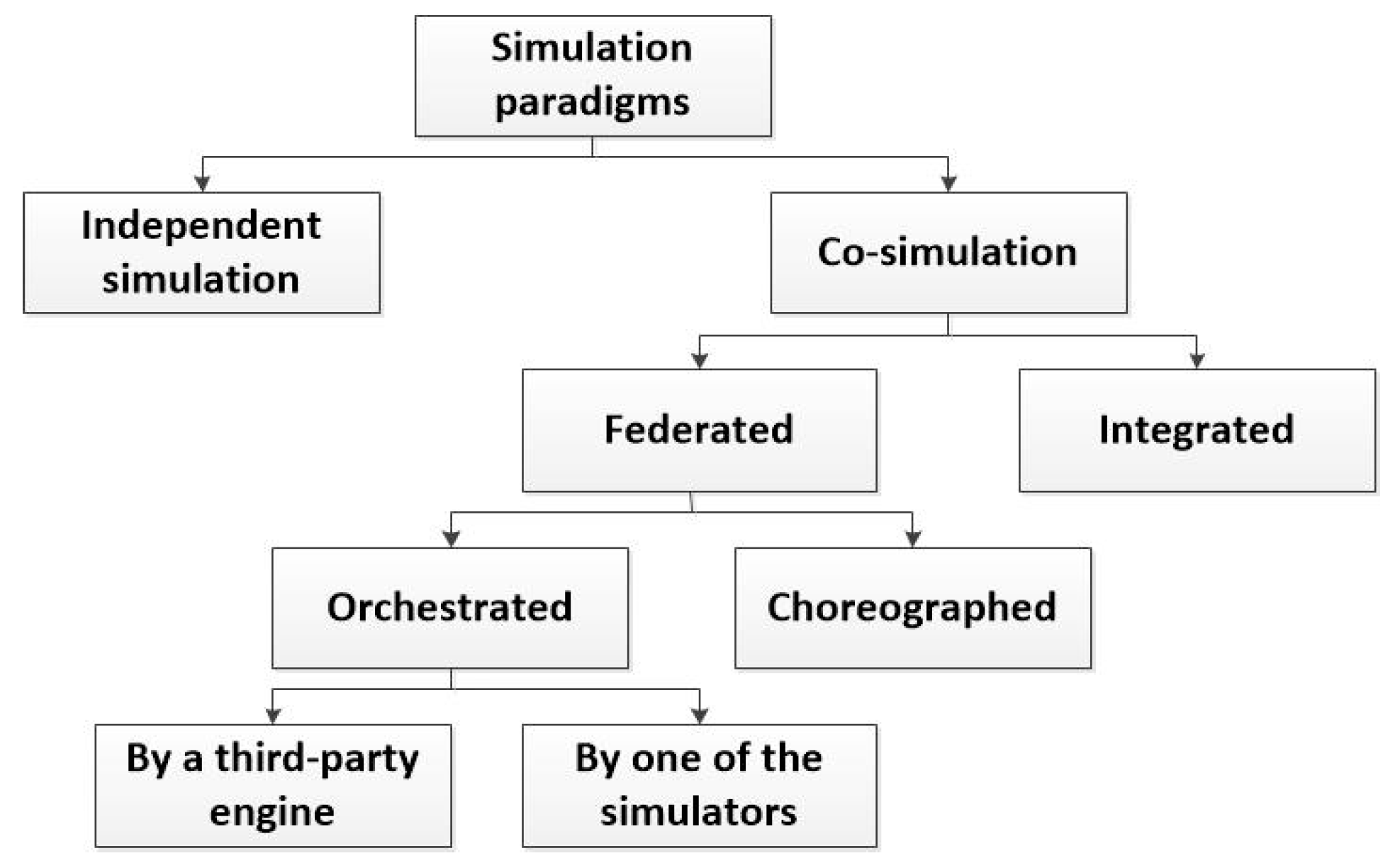
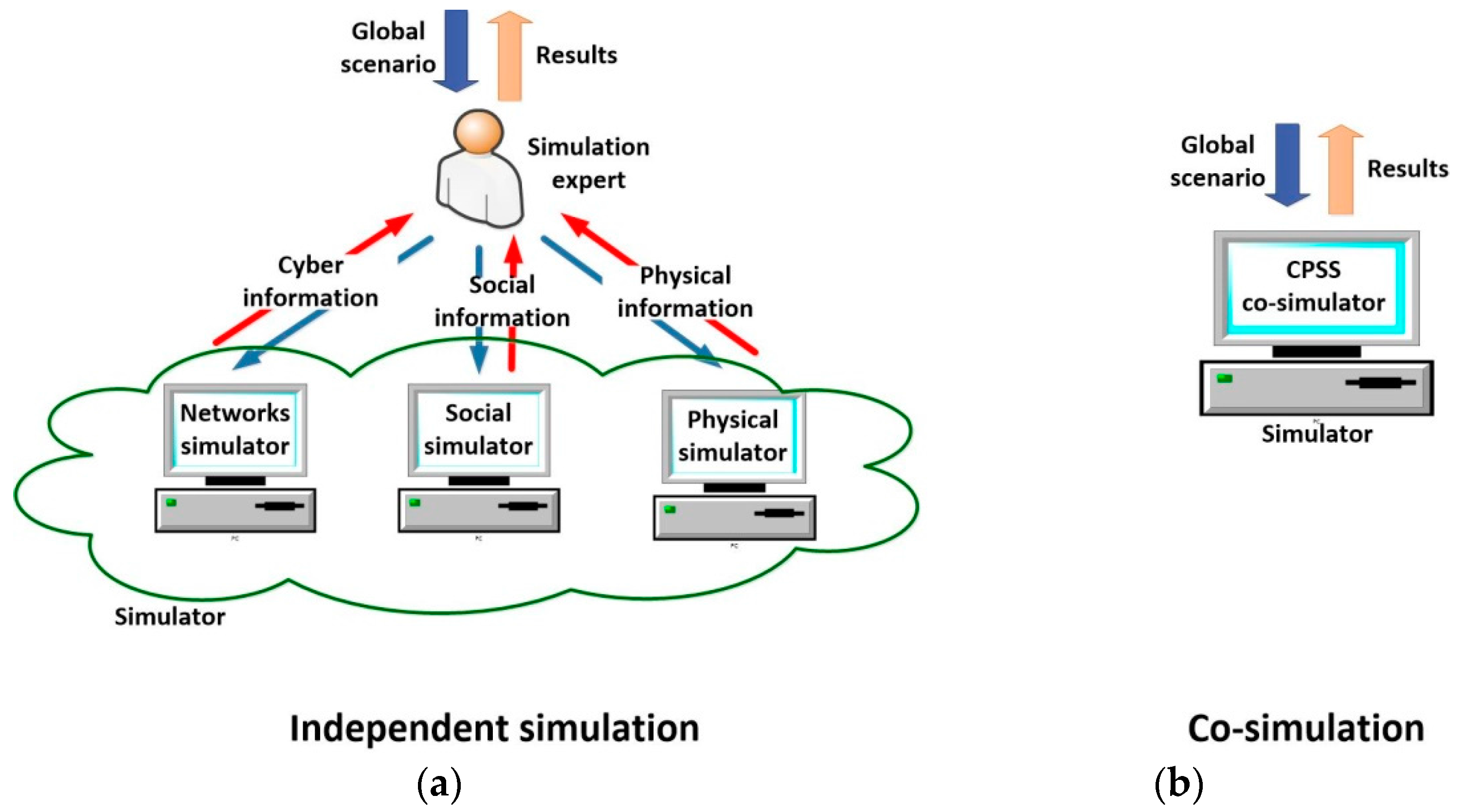
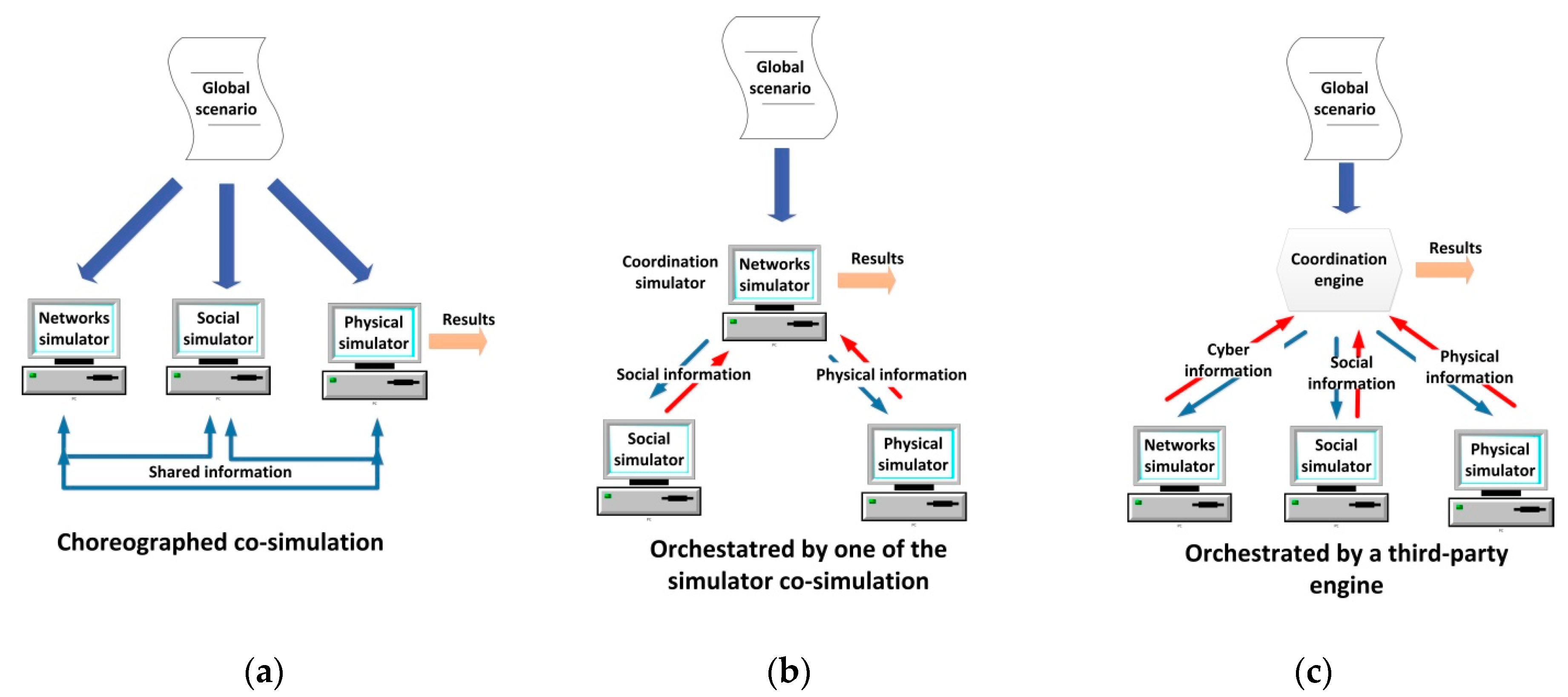
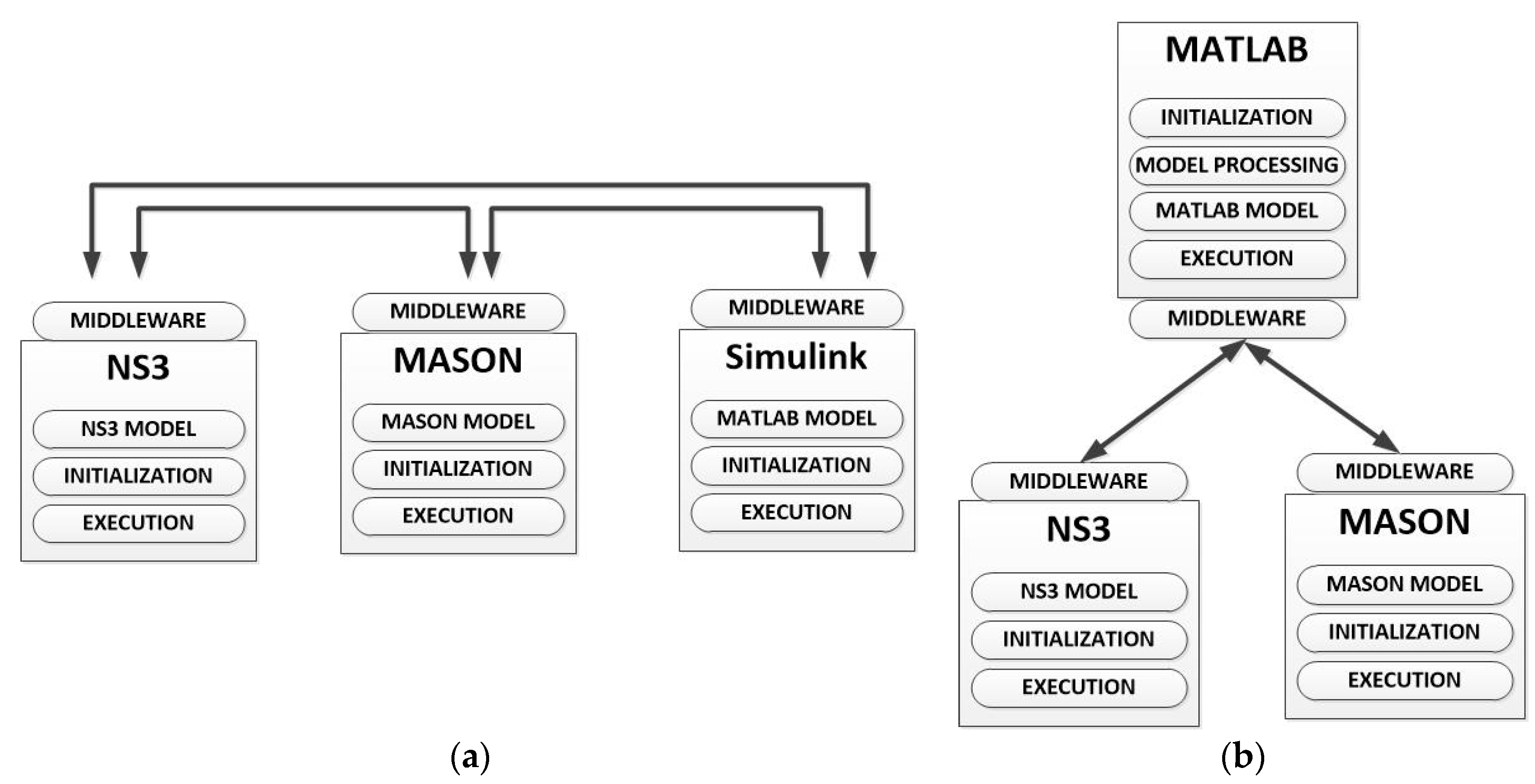
3.2. Selection of the Co-Simulation Paradigm
3.3. Particularization of the General Simulation Model and Simulation Lifecycle
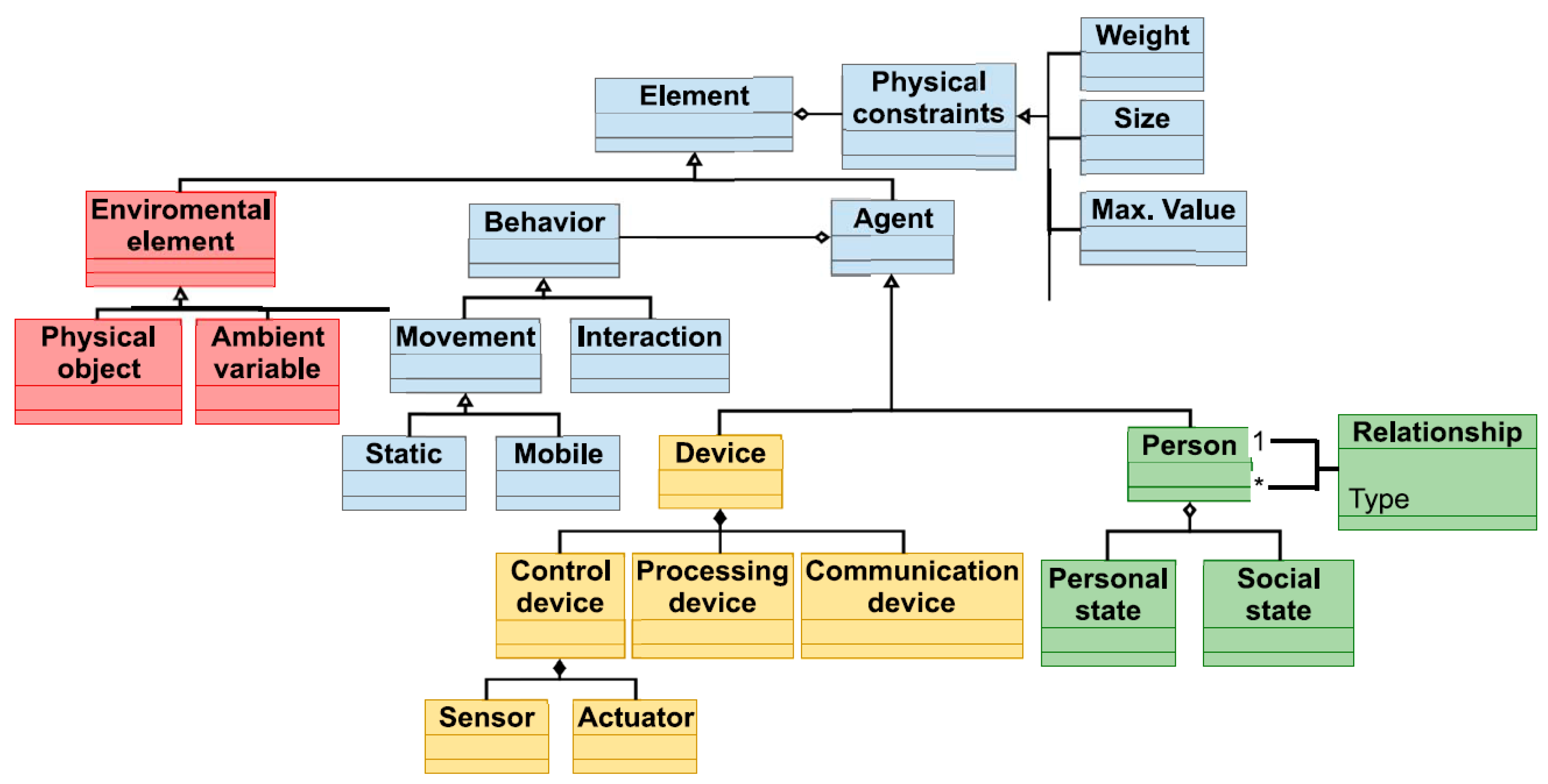
3.3.1. CPSS Simulation Model
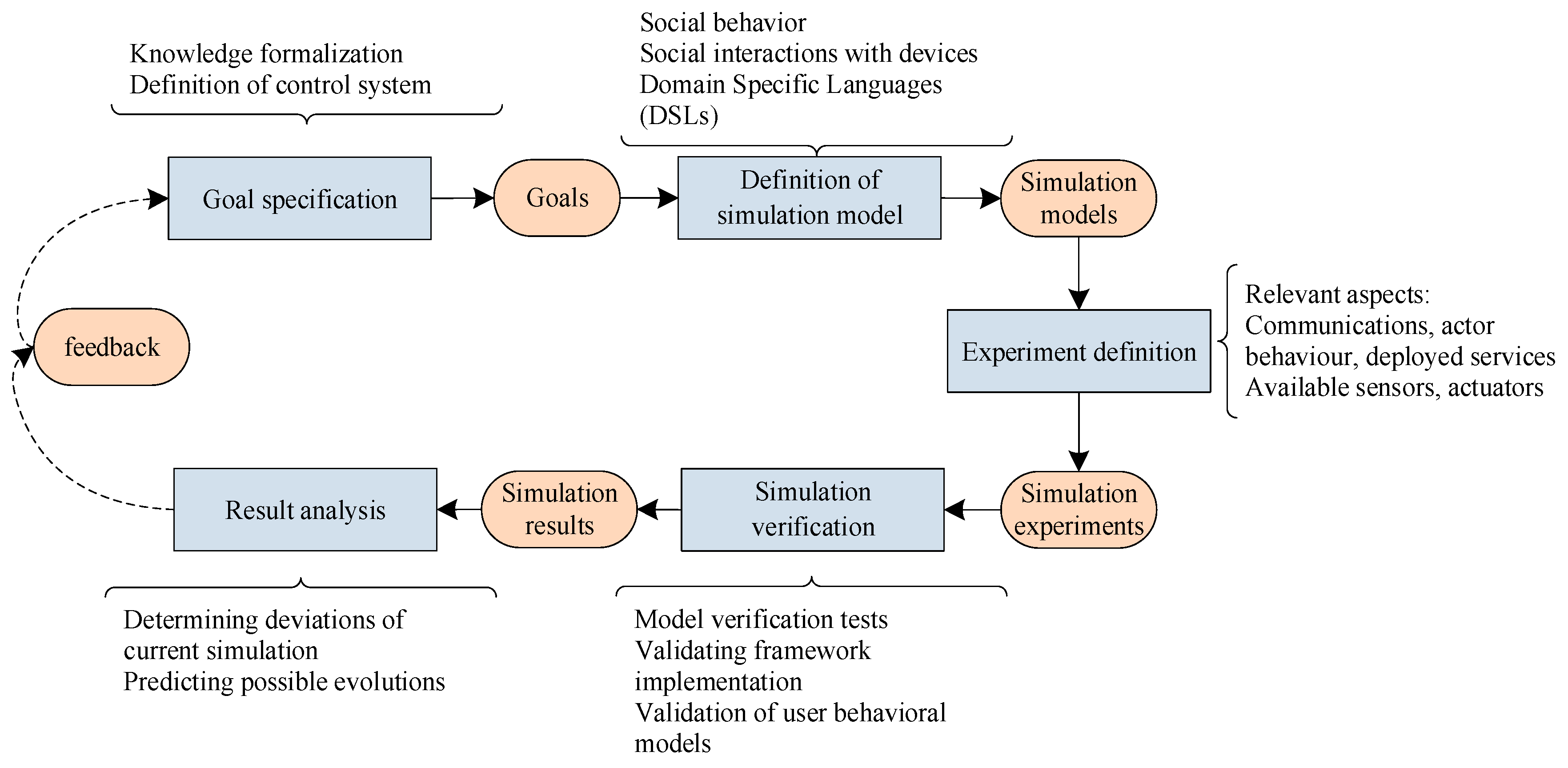
3.3.2. Simulation Lifecycle
- In CPSS, we need to consider several aspects (e.g., social, physical and cyber) of the agents’ behavior. For example, movement in devices can be dictated by movement of people carrying those devices. Also, in a social simulation it is useful to know if persons that walk through a corridor should have enough WiFi coverage, or would detect a Bluetooth beacon that is broadcasting a signal in one of the surrounding rooms.
- Some tools must be needed to create experiments from previous ones, by modifying functionalities or stimulus affecting simulated actors to produce expected effect. Experiment creation should be done by domain experts, who have the required experience to identify human and device behavior in knowledge bases but they also have little experience in software engineering. Thus, it is needed to provide configuration and personalization tools easy to use for domain experts and adequate to their skills.
- Tools for analyzing the results of the simulation are extremely important to deal with the amount of data that is produced by the simulation. They should be able to process and facilitate the analysis by the experts. Moreover, after real deployment of services or control systems, those tools should also be used for analyzing and comparing current data against simulations so as to identify deviations and foresee future situations. For doing that, performance data must be generated by the simulator.
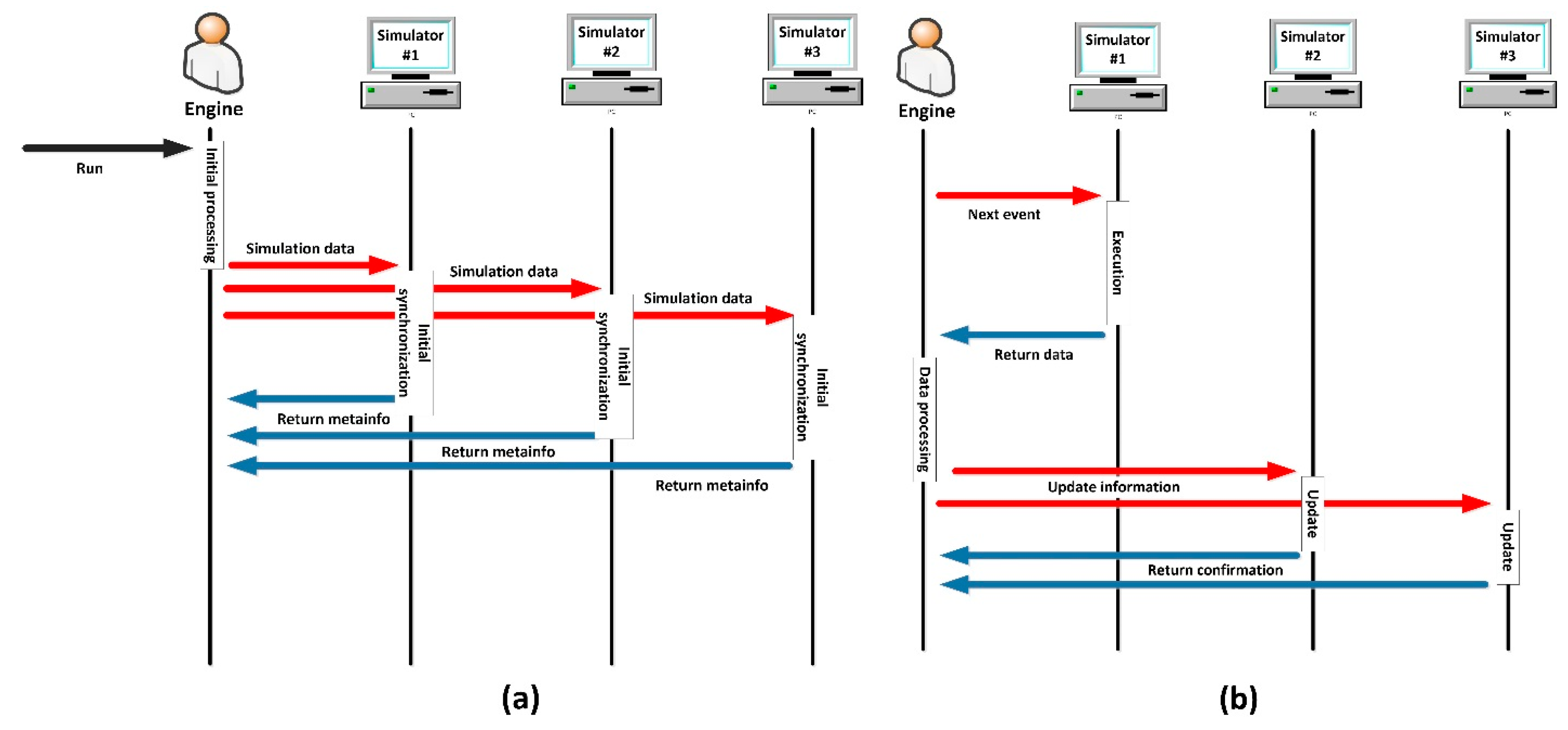
3.4. Selection of the Appropriate Coordination Mechanism
3.5. Design of the User Interface and Results Presentation
4. Experimental Validation: Co-Simulator Development and Experiment Description
4.1. Co-Simulator Implementation
- REQ#1. Flexibility: The proposed simulation tool is focused in one particular application (crowd management), so requirements about flexibility are not imposed.
- REQ#2. Modularity: The proposed co-simulator should allow incorporating new types of devices in the cyber world as new technologies are proposed or investigated.
- REQ#3. Scalability: Simulations scenarios are limited to large-facilities so the maximum number of agents in a certain simulation is of various tens of thousands. As maximum, then, the co-simulator must be able to consider fifty thousands of agents. However, as we are saying later, that is not the most common case.
- REQ#4. Accuracy: As social models present a limited accuracy (human behavior is very difficult to predict), it is not required a high level of precision in the designed tool (a medium value would be acceptable).
- CHAR#1. Simulations are performed by social experts, who are not programmers or technological professional. Thus, simulators cannot require technological knowledge.
- CHAR#2. In general, particular values or states at a certain time step are not interesting. In crowd management global tendencies (e.g., is the panic growing?) are more important than particular values.
- CHAR#3. The most important subsystem in crowd management systems is the social world. Simulations must provide precise social information, in order to evaluate the crowd behavior. Physical and cyber worlds are secondary.
- CHAR#4. As buildings may be complex structures, designing the models to include correctly the scenario in the simulator can be difficult in some occasions. However, although many agents might be included in one simulation, all of them present the same behavior, so the required processing capabilities to execute the simulations are limited.
- CHAR#5. The number of agents in a certain scenario is limited. Buildings are regulated and a maximum capacity is always defined. Even when over-capacity is considered, the number of agents in a certain scenario cannot increase indefinitely.
- CHAR#6. Results must be represented using both techniques: temporal and statistical graphics, and animations about the scenario’s evolution in time.
- CHAR#7. The group of future developers does not include any expert on simulators programming. Then, complicated and specific implementation cannot be addressed.
- CHAR#8. The simulation scenarios are limited to large facilities, so user don not have to be are not enabled to design their own scenarios.
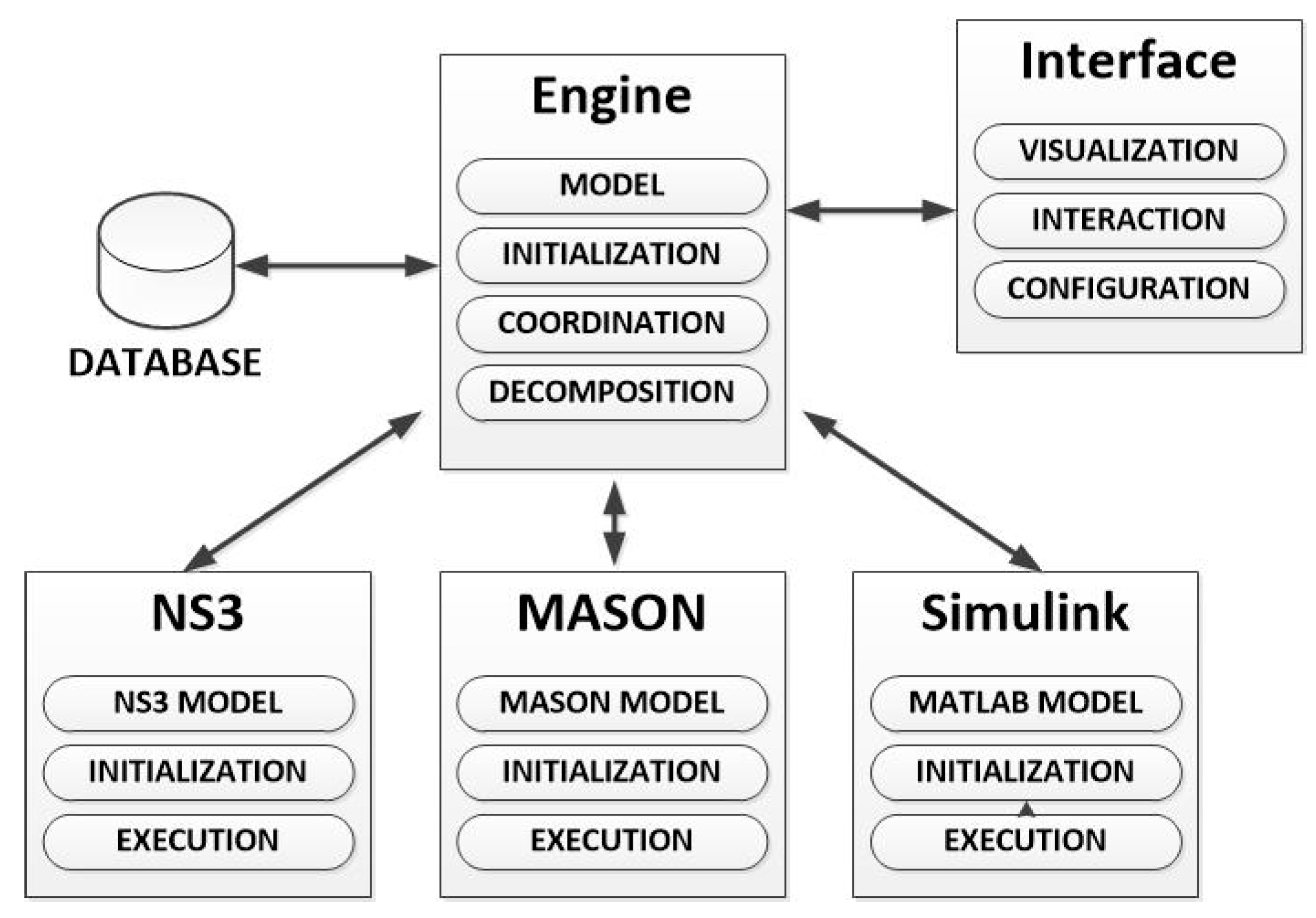
- CHAR#9. In this case the employed domain-specific simulators were: Matlab/Simulink as physical processes simulator, NS3 as network simulator and MASON as social simulator. We chose these instruments due to their extended use in research, because they present an open architecture and, besides, MASON and NS3 are open source and, finally, due to their efficient performance.
4.2. Experiment Description
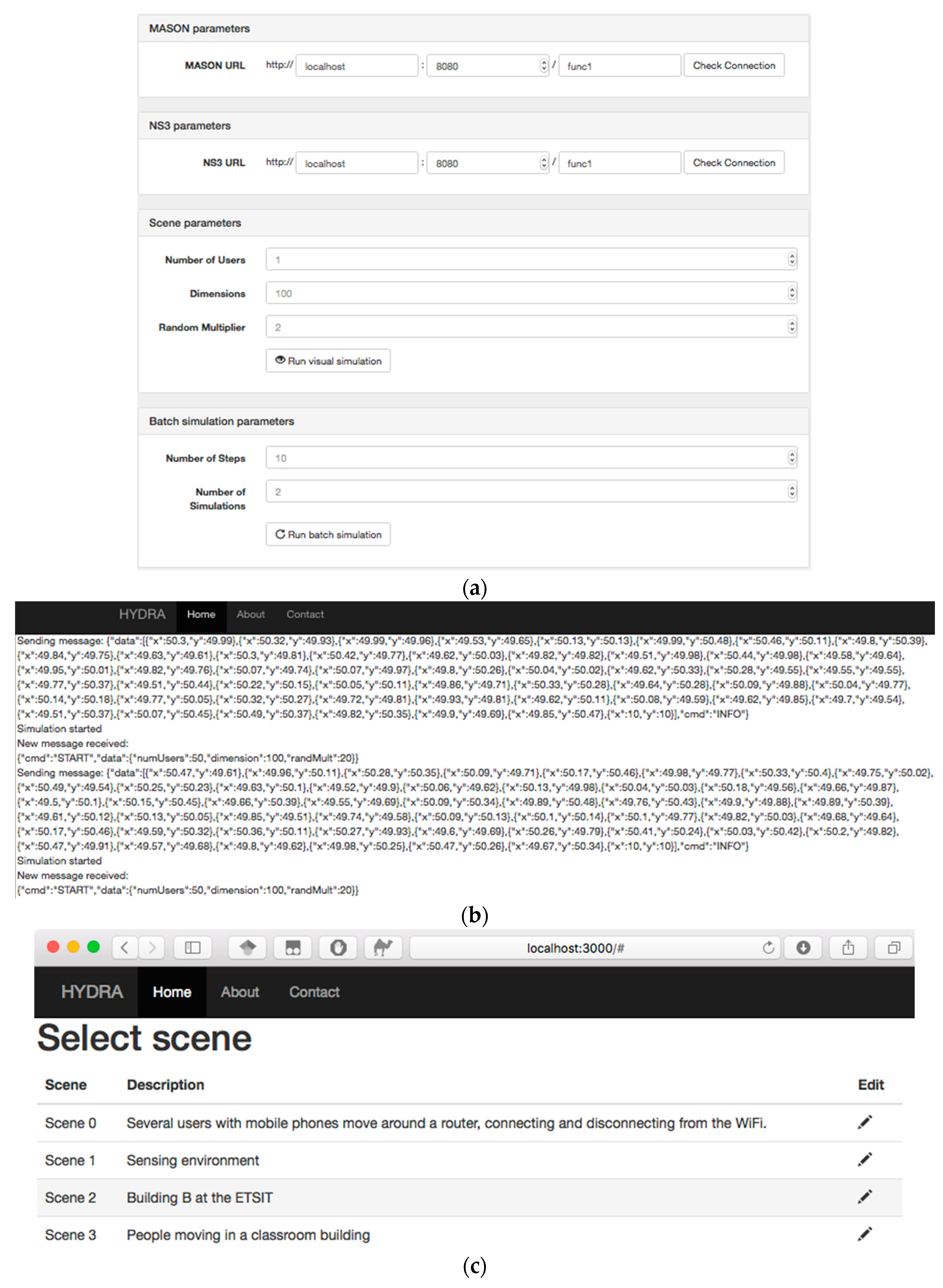
4.2.1. Non-Methodological Co-Simulator Implementation
4.2.2. Detailed Description of Experiments
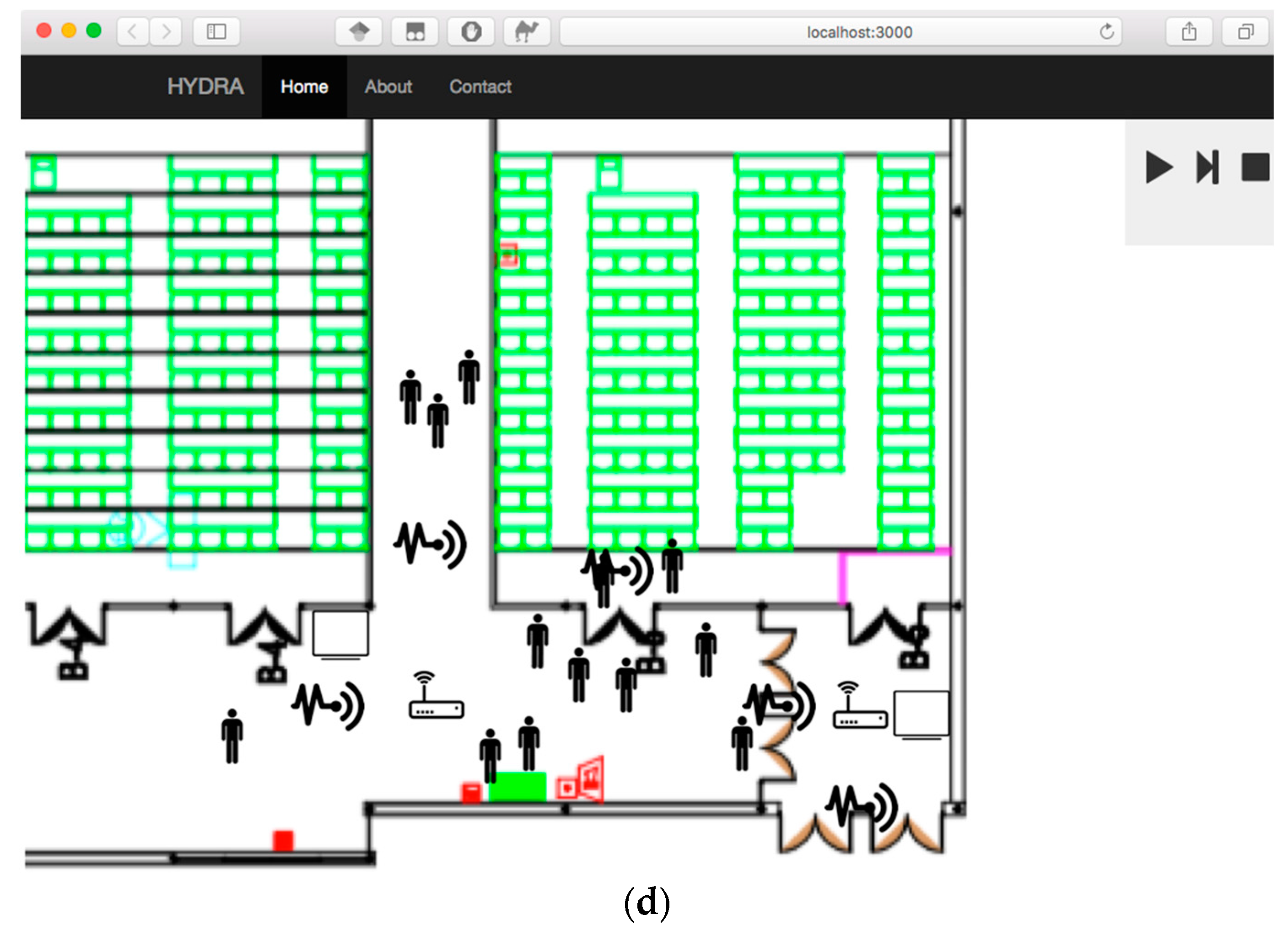
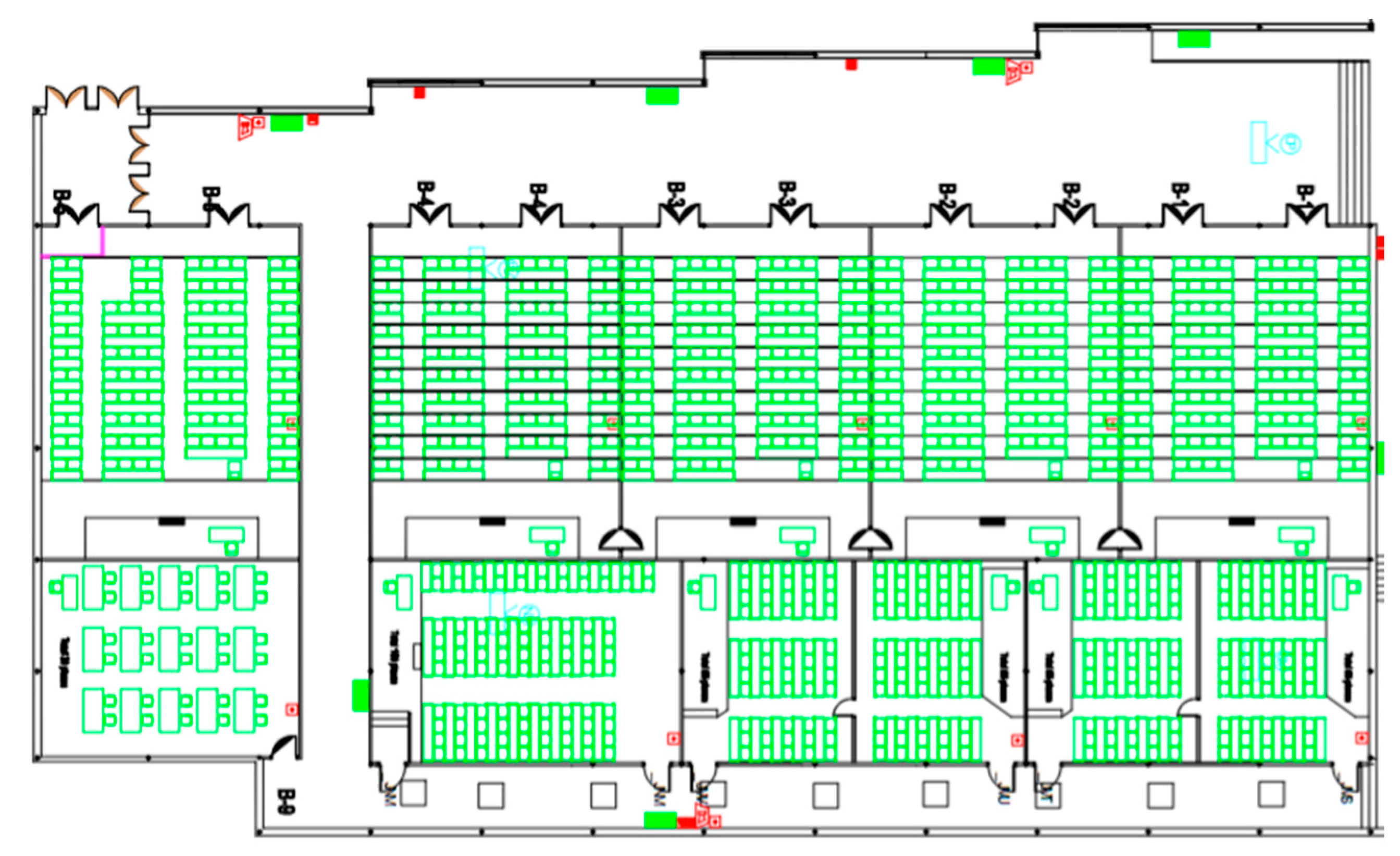
4.2.3. Simulation Scenario
5. Experimental Validation: Results
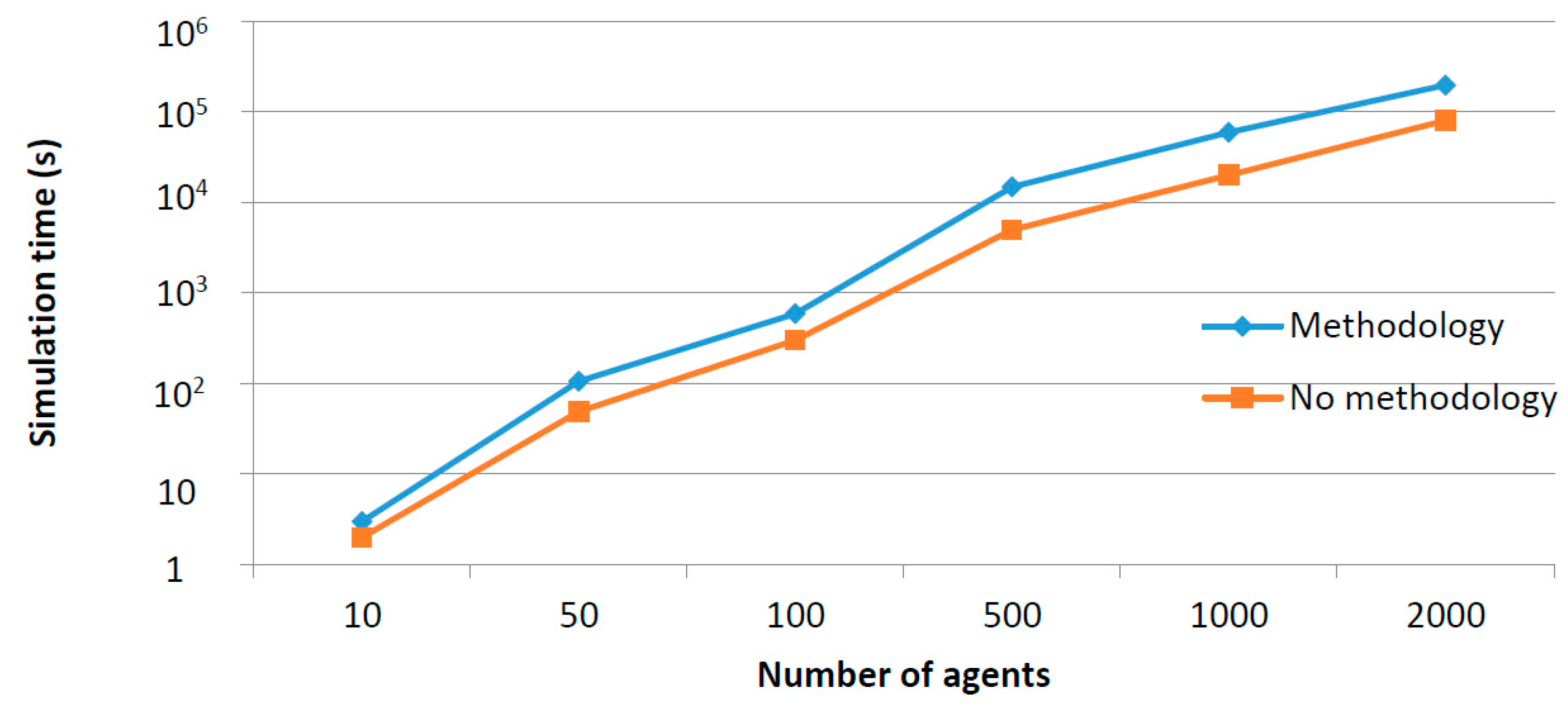
5.1. First Experiment (Experiment#1): Results
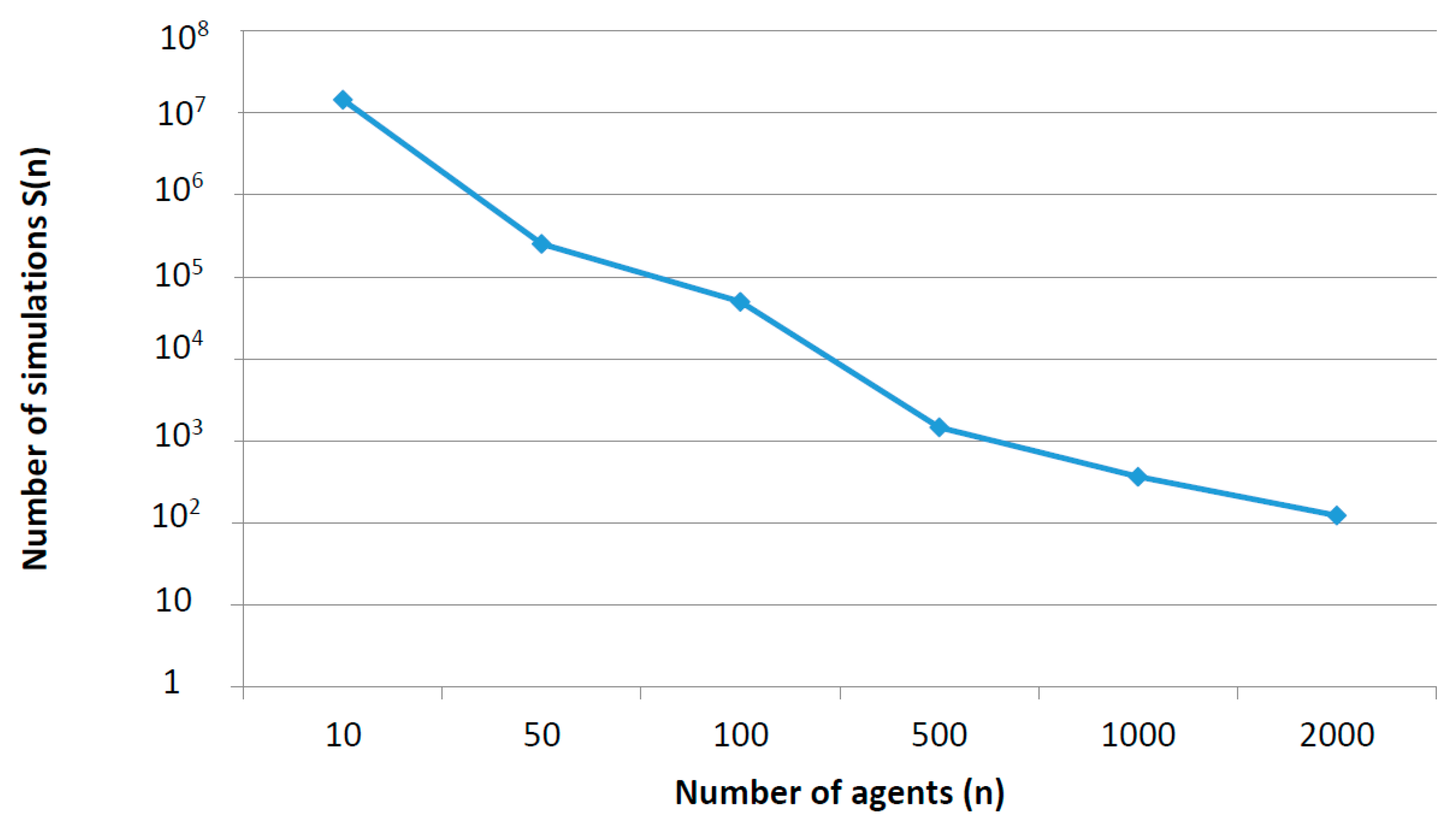
5.2. Second Experiment (Experiment#2): Results
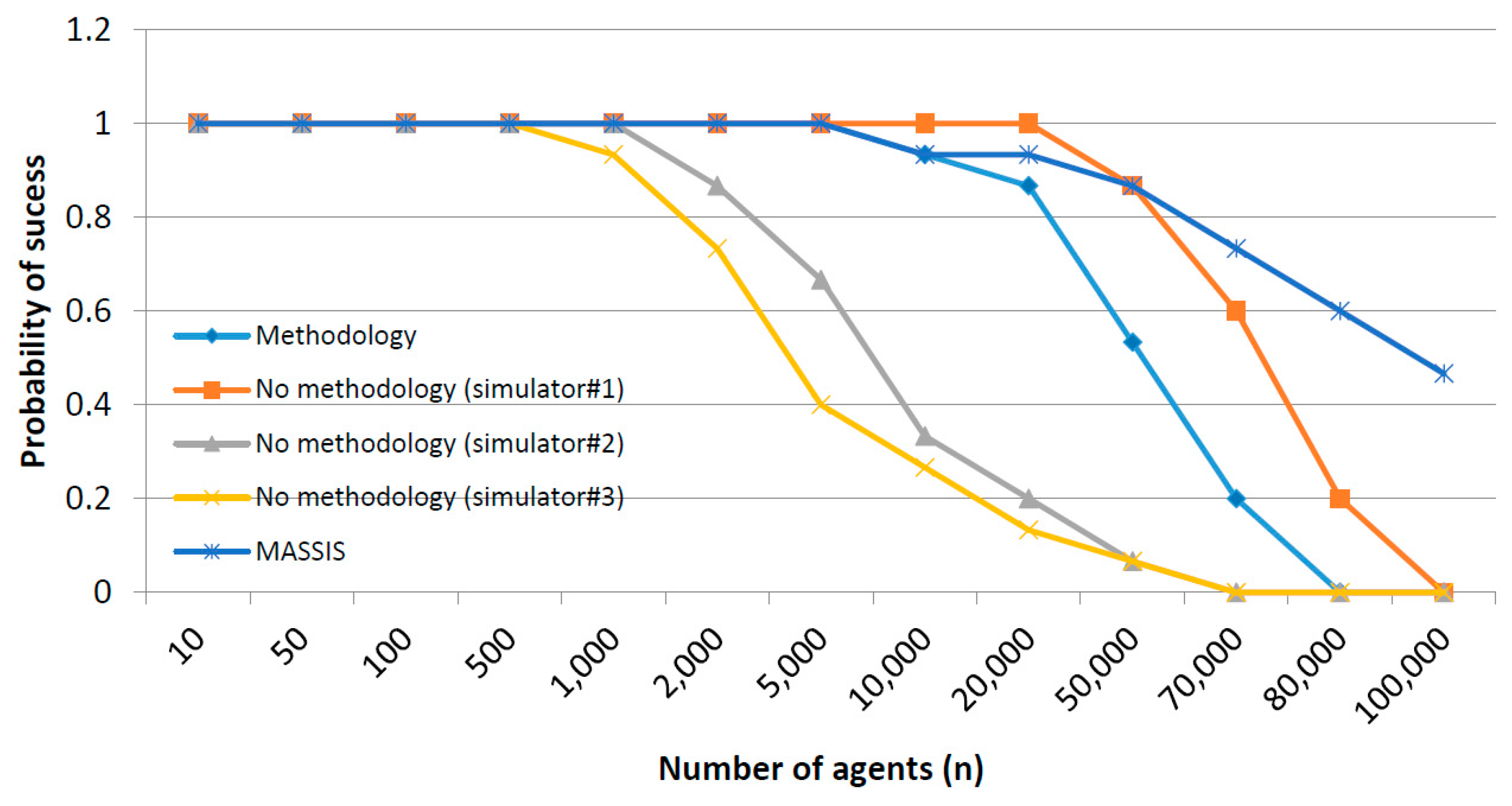
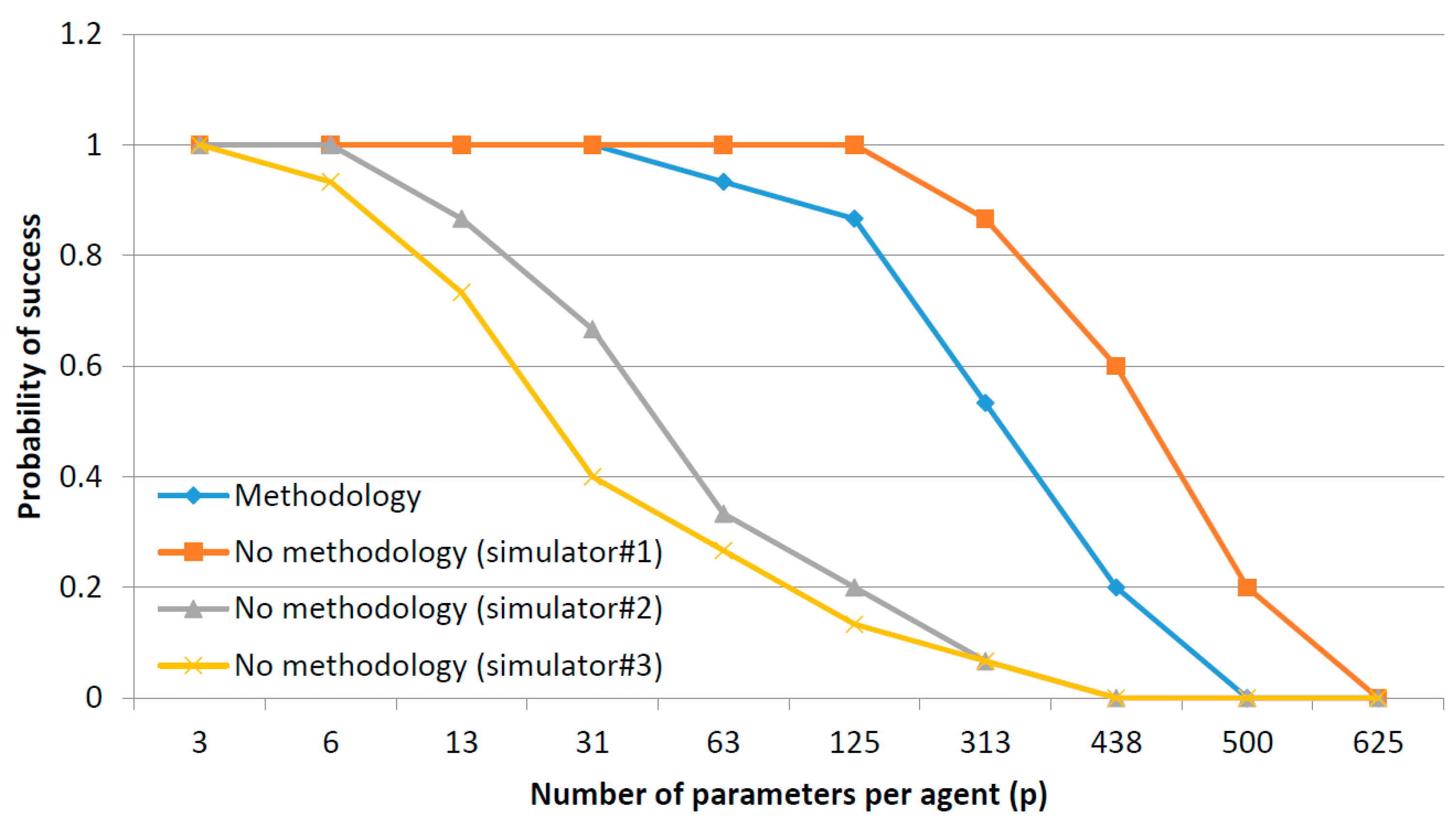
5.3. Third Experiment (Experiment#3): Results
5.4. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| CPSS | Cyber-Physical Social Sensing |
| CPS | Cyber-Physical Systems |
References
- Liu, Z.; Yang, D.S.; Wen, D.; Zhang, W.M.; Mao, W. Cyber-physical-social systems for command and control. IEEE Intell. Syst. 2011, 26, 92–96. [Google Scholar] [CrossRef]
- Smirnov, A.; Levashova, T.; Shilov, N.; Sandkuhl, K. Ontology for cyber-physical-social systems self-organization. In Proceedings of the 16th Conference of Open Innovations Association (FRUCT16), Oulu, Finland, 27–31 October 2014; pp. 101–107. [Google Scholar]
- Latour, B. Reassembling the Social—An Introduction to Actor-Network-Theory; Oxford University Press: Oxford, UK, 2005. [Google Scholar]
- Tory Higgins, E. Social cognition: Learning about what matters in the social world. Eur. J. Soc. Psychol. 2000, 30, 3–39. [Google Scholar] [CrossRef]
- Forsyth, D.R. Crowds and Collective Behavior; Group Dynamics: Wadsworth, OH, USA, 2010; pp. 500–528. [Google Scholar]
- Aguirre, B.E.; Torres, M.R.; Gill, K.B.; Hotchkiss, H.L. Normative collective behavior in the Station building fire. Soc. Sci. Q. 2011, 92, 100–118. [Google Scholar] [CrossRef] [PubMed]
- Drury, J.; Novelli, D.Y.; Stott, C. Psychological disaster myths in the perception and management of mass emergencies. J. Appl. Soc. Psychol. 2013, 43, 2259–2270. [Google Scholar] [CrossRef]
- Huo, F.Z.; Song, W.G.; Liu, X.D.; Jiang, Z.G.; Liew, K.M. Investigation of Human Behavior in Emergent Evacuation from an Underground Retail Store. Procedia Eng. 2014, 71, 350–356. [Google Scholar] [CrossRef]
- National Institute of Standards and Technology. CPS Public Working Group. Available online: pages.nist.gov/cpspwg (accessed on 31 August 2016).
- Sarbu, I.; Sebarchievici, C. Performance Evaluation of Radiator and Radiant Floor Heating Systems for an Office Room Connected to a Ground-Coupled Heat Pump. Energies 2016, 9, 228. [Google Scholar] [CrossRef]
- Warren, I. The Renaissance of Legacy Systems: Method Support for Software-System Evolution; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Borch, C. Crowd theory and the management of crowds: A controversial relationship. Theory Cult. Soc. 2015, 32, 155–175. [Google Scholar] [CrossRef]
- Jiang, L.; Jingyu, L.; Shen, C.; Yang, S.; Han, Z. Obstacle Optimization for Panic Flow. Reducing the Tangential Momentum Increases the Escape Speed. PLoS ONE 2014, 9, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Weidmann, U.; Kirsch, U. Pedestrian and Evacuation Dynamics; Springer: Berlin, Germany, 2014. [Google Scholar]
- Hotchkiss, H.L.; Aguirre, B.E.; Best, E. A critique of the official report on the evacuation of the World Trade Center: Continued doubts. Disasters 2013, 37, 695–704. [Google Scholar] [CrossRef] [PubMed]
- Sánchez, B.B.; Sánchez-Picot, Á.; De Rivera, D.S. Using 5G Technologies in the Internet of Things Handovers, Problems and Challenges. In Proceedings of the 9th International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing (IMIS), Blumenau, Brazil, 8–10 July 2015; pp. 364–369. [Google Scholar]
- Baheti, R.; Gill, H. Cyber-physical systems. Impact Control Technol. 2011, 12, 161–166. [Google Scholar]
- Wang, D.; Abdelzaher, T.; Kaplan, L. Social Sensing: Building Reliable Systems on Unreliable Data; Morgan Kaufmann: Burlington, MA, USA, 2015. [Google Scholar]
- Atzori, L.; Iera, A.; Morabito, G.; Nitti, M. The social internet of things (siot)—When social networks meet the internet of things: Concept, architecture and network characterization. Comput. Netw. 2012, 56, 3594–3608. [Google Scholar] [CrossRef]
- Wang, F.Y. The emergence of intelligent enterprises: From CPS to CPSS. IEEE Intell. Syst. 2010, 25, 85–88. [Google Scholar] [CrossRef]
- Social Sensing and CyberPhysical Systems. Available online: http://www3.nd.edu/~dwang5/courses/spring15/syllabus/Syllabus.pdf (accessed on 31 August 2016).
- Zeng, J.; Yang, L.T.; Ma, J. A system-level modeling and design for cyber-physical-social systems. ACM Trans. Embed. Comput. Syst. 2016, 15, 35. [Google Scholar] [CrossRef]
- Bogdan, P.; Marculescu, R. Towards a science of cyber-physical systems design. In Proceedings of the IEEE/ACM International Conference on Cyber-Physical Systems (ICCPS), Chicago, IL, USA, 12–14 April 2011; pp. 99–108. [Google Scholar]
- Xu, Y.; Luo, X.; Wang, W.; Zhao, W. Efficient DV-HOP Localization for Wireless Cyber-Physical Social Sensing System: A Correntropy-Based Neural Network Learning Scheme. Sensors 2017, 17, 135. [Google Scholar] [CrossRef] [PubMed]
- Zhou, P.; Zheng, Y.; Li, M. How long to wait? Predicting bus arrival time with mobile phone based participatory sensing. In Proceedings of the 10th International Conference on Mobile Systems, Applications, and Services, Ambleside, UK, 25–29 June 2012; pp. 379–392. [Google Scholar]
- Tang, H.; Li, L.; Xiao, N. Smooth Sensor Motion Planning for Robotic Cyber Physical Social Sensing (CPSS). Sensors 2017, 17, 393. [Google Scholar] [CrossRef] [PubMed]
- Jia, Y.; Zhou, Z.; Chen, F.; Duan, P.; Guo, Z.; Mumtaz, S. A Non-Intrusive Cyber Physical Social Sensing Solution to People Behavior Tracking: Mechanism, Prototype, and Field Experiments. Sensors 2017, 17, 143. [Google Scholar] [CrossRef] [PubMed]
- Li, F.; Liu, G.; Liu, J.; Chen, X.; Ma, X. 3D Tracking via Shoe Sensing. Sensors 2016, 16, 1809. [Google Scholar] [CrossRef] [PubMed]
- Dao, M.S.; Pongpaichet, S.; Jalali, L.; Kim, K.; Jain, R.; Zettsu, K. A real-time complex event discovery platform for cyber-physical-social systems. In Proceedings of International Conference on Multimedia Retrieval; ACM: New York, NY, USA, 2014; p. 201. [Google Scholar]
- Broman, D.; Greenberg, L.; Lee, E.A.; Masin, M.; Tripakis, S.; Wetter, M. Requirements for Hybrid Cosimulation; No. UCB/EECS-2014-157; California University: Sacramento, CA, USA, 2014. [Google Scholar]
- Alharthi, M.; Taha, A.E.M.; Vasilev, V.; Atkinson, K. An Acumen/NS-3 integration for modeling networked Cyber-Physical Systems. In Proceedings of the 27th Biennial Symposium on Communications (QBSC), Kingston, ON, Canada, 1–3 June 2014; pp. 189–192. [Google Scholar]
- Guo, D.; Cao, J.; Wang, X.; Fu, Q.; Li, Q. Combating QR-Code-based compromised accounts in mobile social networks. Sensors 2016, 16, 1522. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Dai, H.N.; Wang, H.; Xiao, H. On Performance Analysis of Protective Jamming Schemes in Wireless Sensor Networks. Sensors 2016, 16, 1987. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Long, J.; Zhang, C.; Zhao, G. A Delay-Aware and Reliable Data Aggregation for Cyber-Physical Sensing. Sensors 2017, 17, 395. [Google Scholar] [CrossRef] [PubMed]
- Huang, C.; Marshall, J.; Wang, D.; Dong, M. Towards Reliable Social Sensing in Cyber-Physical-Social Systems. In Proceedings of the 2016 IEEE International Parallel and Distributed Processing Symposium Workshops, Chicago, IL, USA, 23–27 May 2016; pp. 1796–1802. [Google Scholar]
- Su, Z.; Qi, Q.; Xu, Q.; Guo, S.; Wang, X. Incentive scheme for cyber physical social systems based on user behaviors. IEEE Trans. Emerg. Top. Comput. 2017. [Google Scholar] [CrossRef]
- Sowe, S.K.; Zettsu, K. Human Factors in Cyber-Physical Social Systems: Leveraging Social Sensor Data. Inf. Model. Knowl. Bases XXVII 2016, 280, 157. [Google Scholar]
- Ganti, R.K.; Tsai, Y.E.; Abdelzaher, T.F. Senseworld: Towards cyber-physical social networks. In Proceedings of the International Conference on Information Processing in Sensor Networks, St. Louis, MO, USA, 22–24 April 2008; pp. 563–564. [Google Scholar]
- Cassandras, C.G. Smart cities as cyber-physical social systems. Engineering 2016, 2, 156–158. [Google Scholar] [CrossRef]
- Zheng, X.; Cai, Z.; Yu, J.; Wang, C.; Li, Y. Follow but no track: Privacy preserved profile publishing in cyber-physical social systems. IEEE Int. Things J. 2017. [Google Scholar] [CrossRef]
- Zeng, J.; Yang, L.T.; Lin, M.; Ning, H.; Ma, J. A survey: Cyber-physical-social systems and their system-level design methodology. Future Gener. Comput. Syst. 2016. [Google Scholar] [CrossRef]
- Lasi, H.; Fettke, P.; Kemper, H.G.; Feld, T.; Hoffmann, M. Industry 4.0. Bus. Inf. Syst. Eng. 2014, 6, 239–242. [Google Scholar] [CrossRef]
- Jiang, P.; Ding, K.; Leng, J. Towards a cyber-physical-social-connected and service-oriented manufacturing paradigm: Social Manufacturing. Manuf. Lett. 2016, 7, 15–21. [Google Scholar] [CrossRef]
- Zhang, Y.; Song, L.; Jiang, C.; Tran, N.H.; Dawy, Z.; Han, Z. A Social-Aware Framework for Efficient Information Dissemination in Wireless Ad Hoc Networks. IEEE Commun. Mag. 2017, 55, 174–179. [Google Scholar] [CrossRef]
- Ferrag, M.A.; Maglaras, L.; Ahmim, A. Privacy-preserving schemes for ad hoc social networks: A survey. IEEE Commun. Surv. Tutor. 2017. [Google Scholar] [CrossRef]
- Papakipos, M.N.; Garcia, D.H.; Toksvig, M.J.M. Social ad Hoc Networking Protocol and Presentation Layer. U.S. Patent No. 9,679,336, 13 June 2017. [Google Scholar]
- Gupta, R.; Krishnamurthi, N.; Wang, U.T.; Tamminedi, T.; Gerla, M. Routing in Mobile Ad-Hoc Networks using Social Tie Strengths and Mobility Plans. In Proceedings of the Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017; pp. 1–6. [Google Scholar]
- Ding, K.; Jiang, P. Incorporating Social Sensors and CPS Nodes for Personalized Production under Social Manufacturing Environment. Procedia CIRP 2016, 56, 366–371. [Google Scholar] [CrossRef]
- Zhang, Y.; Cheng, Q.; Zhong, S. Privacy-preserving data aggregation in mobile phone sensing. IEEE Trans. Inf. Forensics Secur. 2016, 11, 980–992. [Google Scholar] [CrossRef]
- Li, Q.; Cao, G. Providing privacy-aware incentives in mobile sensing systems. IEEE Trans. Mobile Comput. 2015, 15, 1485–1498. [Google Scholar] [CrossRef]
- Thejaswini, M.; Rajalakshmi, P.; Desai, B. Novel sampling algorithm for human mobility-based mobile phone sensing. IEEE Int. Things J. 2014, 2, 210–220. [Google Scholar] [CrossRef]
- Xiao, M.; Wu, J.; Huang, L.; Liu, C. Multi-task assignment for crowdsensing in mobile social networks. In Proceedings of the 2015 IEEE Conference on Computer Communications (INFOCOM), Kowloon, China, 26 April–1 May 2015; pp. 2227–2235. [Google Scholar]
- Gomes, C.; Thule, C.; Broman, D.; Larsen, P.G.; Vangheluwe, H. Co-simulation: State of the art. arXiv 2017. [Google Scholar]
- Vangheluwe, H.; de Lara, J.; Mosterman, P.J. An introduction to multiparadigm modelling and simulation. In Proceedings of the AIS2002 (AI, Simulation & Planning), Lisbon, Portugal, 7–10 April 2002. [Google Scholar]
- Busch, M.; Schweizer, B. Numerical stability and accuracy of different cosimulation techniques: Analytical investigations based on a 2-DOF test model. In Proceedings of the 1st Joint International Conference on Multibody System Dynamics, Lappeenranta, Finland, 25–27 May 2010; Curran Associates, Inc.: Red Hook, NY, USA, 2010; pp. 25–27. [Google Scholar]
- Kuhl, F.; Weatherly, R.; Dahmann, J. Creating Computer Simulation Systems: An Introduction to the High Level Architecture; Prentice Hall PTR: Maldon, UK, 1999. [Google Scholar]
- Blochwitz, T. The Functional Mockup Interface for Tool independent Exchange of Simulation Models. In Proceedings of the 8th International Modelica Conference, Dresden, Germany, 20–22 March 2011; pp. 20–22. [Google Scholar]
- Molter, H.G. Discrete event system specification. In SynDEVS Co-Design Flow; Springer: Wiesbaden, Germany, 2012; pp. 9–42. [Google Scholar]
- Bogomolov, S.; Greitschus, M.; Jensen, P.G.; Larsen, K.G.; Mikucionis, M.; Strump, T.; Tripakis, S. Co-Simulation of Hybrid Systems with SpaceEx and Uppaal. In Proceedings of the 11th International Modelica Conference (MODELICA), Versailles, France, 21–23 September 2015; Linköping University Electronic Press: Paris, France, 2015; pp. 159–169. [Google Scholar]
- Awais, M.U.; Mueller, W.; Elsheikh, A.; Palensky, P.; Widl, E. Using the HLA for Distributed Continuous Simulations. In Proceedings of the 2013 8th EUROSIM Congress on Modelling and Simulation, Cardiff, UK, 10–13 September 2013; pp. 544–549. [Google Scholar]
- Nicolescu, G.; Boucheneb, H.; Gheorghe, L.; Bouchhima, F. Methodology for efficient design of continuous/discrete-events co-simulation tools. In High Level Simulation Languages and Applications-HLSLA; Society for Modeling & Simulation International: San Diego, CA, USA, 2007; pp. 172–179. [Google Scholar]
- Falby, J.S.; Zyda, M.J.; Pratt, D.R.; Mackey, R.L. NPSNET: Hierarchical data structures for real-time three-dimensional visual simulation. Comput. Graph. 1993, 17, 65–69. [Google Scholar] [CrossRef]
- Lang, Y.D.; Biegler, L.T.; Grossmann, I.E. Simultaneous optimization and heat integration with process simulators. Comput. Chem. Eng. 1988, 12, 311–327. [Google Scholar] [CrossRef]
- Macaulay, L. Requirements capture as a cooperative activity. In Proceedings of the IEEE International Symposium on Requirements Engineering, San Diego, CA, USA, 6 January 1993; pp. 174–181. [Google Scholar]
- Wood, D.P.; Christel, M.G.; Stevens, S.M. A multimedia approach to requirements capture and modeling. In Proceedings of the First International Conference on Colorado Springs Requirements Engineering, Colorado Springs, CO, USA, 18–22 April 1994; pp. 53–56. [Google Scholar]
- Nunes, N.J.; Cunha, J.F. Wisdom: A software engineering method for small software development companies. IEEE Softw. 2000, 17, 113. [Google Scholar] [CrossRef]
- Bergman, E. Information Appliances and Beyond: Interaction Design for Consumer Products; Morgan Kaufmann: Burlington, MA, USA, 2000. [Google Scholar]
- Hessel, F.; Le Marrec, P.; Valderrama, C.A.; Romdhani, M.; Jerraya, A.A. MCI—Multilanguage distributed co-simulation tool. In Distributed and Parallel Embedded Systems; Springer: Berlin, Germany, 1999; pp. 191–200. [Google Scholar]
- Nof, S.Y.; Deisenroth, M.P.; Meier, W.L. Using physical simulators to study manufacturing systems design and control. In Proceedings of the AIIE Spring Annual Conference, Callaghan, Australia, 17–19 May 1979; pp. 219–227. [Google Scholar]
- Mallick, S.K.; Cabezas, H.; Bare, J.C.; Sikdar, S.K. A pollution reduction methodology for chemical process simulators. Ind. Eng. Chem. Res. 1996, 35, 4128–4138. [Google Scholar] [CrossRef]
- Mathworks: Matlab/Simulink Homepage. Available online: http://es.mathworks.com/products/simulink/ (accessed on 31 August 2016).
- Maple Home Page. Available online: https://www.maplesoft.com/products/maplesim/ (accessed on 31 August 2016).
- OpenModelica Homepage. Available online: https://www.openmodelica.org/ (accessed on 31 August 2016).
- Wolfram Homepage. Available online: http://www.wolfram.com/system-modeler/ (accessed on 31 August 2016).
- SciLab Homepage. Available online: https://www.scilab.org/scilab/gallery/xcos (accessed on 31 August 2016).
- Larnpotang, S.; Lizdas, D.; Rajon, D.; Luria, I.; Gravenstein, N.; Bisht, Y.; Robinson, A. Mixed simulators: Augmented physical simulators with virtual underlays. In Proceedings of the 2013 IEEE Virtual Reality (VR), Lake Buena Vista, FL, USA, 18–20 March 2013; pp. 7–10. [Google Scholar]
- Bordel, B.; Alcarria, R.; Pérez-Jiménez, M.; Robles, T.; Martín, D.; de Rivera, D.S. Building Smart Adaptable Cyber-Physical Systems: Definitions, Classification and Elements. In International Conference on Ubiquitous Computing and Ambient Intelligence; Springer: Berlin, Germany, 2015; pp. 144–149. [Google Scholar]
- Brooks, C.; Lee, E.A.; Lorenzetti, D.; Nouidui, T.S.; Wetter, M. CyPhySim: A cyber-physical systems simulator. In Proceedings of the 18th International Conference on Hybrid Systems: Computation and Control, Seattle, WA, USA, 14–16 April 2015; pp. 301–302. [Google Scholar]
- Wetter, M.; Nouidui, T.S.; Lorenzetti, D.; Lee, E.A.; Roth, A. Prototyping the next generation energyplus simulation engine. In Proceedings of the 3rd IBPSA Conference, Jeju island, South Korea, 27–29 November 2015. [Google Scholar]
- Derler, P.; Lee, E.A.; Vincentelli, A.S. Modeling cyber–physical systems. Proc. IEEE 2012, 100, 13–28. [Google Scholar] [CrossRef]
- Xue, Y.; Rodriguez, S.; Bogdan, P. A spatio-temporal fractal model for a CPS approach to brain-machine-body interfaces. In Proceedings of the Design, Automation & Test in Europe Conference & Exhibition (DATE), Dresden, Germany, 14–18 March 2016; pp. 642–647. [Google Scholar]
- Ghorbani, M.; Bogdan, P. A cyber-physical system approach to artificial pancreas design. In Proceedings of the Ninth IEEE/ACM/IFIP International Conference on Hardware/Software Codesign and System Synthesis, Montreal, QC, Canada, 29 September–4 October 2013; p. 17. [Google Scholar]
- Davidsson, P. Agent Based Social Simulation: A Computer Science View. Available online: http://jasss.soc.surrey.ac.uk/5/1/7.html (accessed on 31 August 2016).
- Allan, R.J. Survey of Agent Based Modelling and Simulation Tools; Science and Technology Facilities Council: Swindon, UK, 2010. [Google Scholar]
- Sánchez, B.B.; Alcarria, R.; de Rivera, D.S.; Sánchez-Picot, A. Predictive algorithms for mobility and device lifecycle management in Cyber-Physical Systems. EURASIP J. Wirel. Commun. Netw. 2016, 2016, 228. [Google Scholar] [CrossRef]
- Ossowski, S. Agreement Technologies. In Law, Governance and Technology Series, No. 8; Springer: Heidelberg, Germany, 2013. [Google Scholar]
- Euzenat, J.; Shvaiko, P. Ontology Matching; Springer: Heidelberg, Germany, 2007. [Google Scholar]
- Jennings, N.R.; Faratin, P.; Lomuscio, A.R.; Parsons, S.; Wooldridge, M.J.; Sierra, C. Au-tomated negotiation: Prospects, methods and challenges. Int. J. Group Decis. Negot. 2001, 10, 199–215. [Google Scholar] [CrossRef]
- Ferber, J.; Gutknecht, O.; Michel, F. From Agents to Organizations: An Organizational View of MultiAgent Systems. Agent Oriented Softw. Eng. 2004, 2935, 214–230. [Google Scholar]
- Sierra, C.; Debenham, J. Trust and honour in information based agency. In Proceedings of the 5th International Conference on Autonomous Agents and Multi Agent Systems, Hakodate, Japan, 8–12 May 2006; pp. 1225–1232. [Google Scholar]
- Barton, J.; Vijayaraghavan, V. Ubiwise: A Simulator for Ubiquitous Computing Systems Design; HP Labs.: Palo Alto, CA, USA, 2003. [Google Scholar]
- O’Neill, E.; Klepal, M.; Lewis, D.; O’Donnell, T.; O’Sullivan, D.; Pesch, D. A testbed for evaluating human interaction with ubiquitous computing environments. In Proceedings of the Testbeds and Research Infrastructures for the Development of Networks and Communities, Trento, Italy, 23–25 February 2005; pp. 60–69. [Google Scholar]
- Nishikawa, H.; Yamamoto, S.; Tamai, M.; Nishigaki, K.; Kitani, T.; Shibata, N.; Yasumoto, K.; Ito, M. UbiREAL: Realistic Smartspace Simulator for Systematic Testing. Ubiquitous Comput. LNCS 2006, 4206, 459–476. [Google Scholar]
- Tang, L.; Zhou, X.; Becker, C.; Yu, Z.; Schiele, G. Situation-based design: A rapid ap-proach for pervasive application development. In Proceedings of the 9th International Conference on Ubiquitous Intelligence & Computing and 9th International Conference on Autonomic & Trusted Computing (UIC/ATC), Fukuoka, Japan, 4–7 September 2012; pp. 128–135. [Google Scholar]
- Serrano, E.; Botía, J.A. Validating ambient intelligence based ubiquitous computing systems by means of artificial societies. Inf. Sci. 2013, 222, 3–24. [Google Scholar] [CrossRef]
- UbikSim Website. Available online: https://github.com/emilioserra/UbikSim/wiki (accessed on 31 August 2016).
- Campillo-Sanchez, P.; Gómez-Sanz, J.J.; Botía, J.A. PHAT: Physical Human Activity Tester. In Hybrid Artificial Intelligent Systems; Springer: Heidelberg, Germany, 2013; Volume 8073, pp. 41–50. [Google Scholar]
- Bogdan, P.; Marculescu, R. A fractional calculus approach to modeling fractal dynamic games. In Proceedings of the 50th IEEE Conference on Decision and Control and European Control, Orlando, FL, USA, 12–15 December 2011; pp. 255–260. [Google Scholar]
- Helbing, D. Modeling multi-lane traffic flow with queuing effects. Phys. A Stat. Mech. Appl. 1997, 242, 175–194. [Google Scholar] [CrossRef]
- Cao, K.C.; Chen, Y.; Stuart, D. A Fractional Micro-Macro Model for Crowds of Pedestrians based on Fractional Mean Field Games. arXiv 2016. [Google Scholar]
- Macal, C.; North, M. Introductory tutorial: Agent-based modeling and simulation. In Proceedings of the 2014 Winter Simulation Conference, Savannah, GA, USA, 7–10 December 2014; pp. 6–20. [Google Scholar]
- Railsback, S.F.; Lytinen, S.L.; Jackson, S.K. Agent-based simulation platforms: Review and development recommendations. Simulation 2006, 82, 609–623. [Google Scholar] [CrossRef]
- North, M.J.; Nicholson, T.; Collier, J.R.V. Experiences creating three implementations of the repast agent modeling toolkit. ACM Trans. Model. Comput. Simul. 2006, 16, 1–25. [Google Scholar] [CrossRef]
- NS3 Homepage. Available online: https://www.nsnam.org/ (accessed on 31 August 2016).
- Varga, A. The OMNeT++ discrete event simulation system. In Proceedings of the European simulation multiconference (ESM’2001), Prague, Czech Republic, 6–9 June 2001; p. 65. [Google Scholar]
- Aneiba, A.; Chibelushi, C.C. OPNET-Based Performance Analysis of a Multi-agent Architecture for Managing the Mobile Content Delivery Process. In Information Science and Applications (ICISA); Springer: Singapore, 2016; pp. 127–137. [Google Scholar]
- Siraj, S.; Gupta, A.; Badgujar, R. Network simulation tools survey. Int. J. Adv. Res. Comput. Commun. Eng. 2012, 1, 199–206. [Google Scholar]
- Eriksson, J.; Österlind, F.; Finne, N.; Tsiftes, N.; Dunkels, A.; Voigt, T.; Marrón, P.J. COOJA/MSPSim: Interoperability testing for wireless sensor networks. In Proceedings of the 2nd International Conference on Simulation Tools and Techniques, Rome, Italy, 2–6 March 2009; p. 27. [Google Scholar]
- SimpleIoTSimulator HomePage. Available online: http://www.smplsft.com/SimpleIoTSimulator.html (accessed on 31 August 2016).
- Duarte, F.; Ferreira, A.; Fael, P. Software for Simulation of Vehicle-Road Interaction. In New Advances in Information Systems and Technologies; Springer: Berlin, Germany, 2016; pp. 681–690. [Google Scholar]
- Nitti, M.; Atzori, L.; Cvijikj, I.P. Friendship selection in the social internet of things: Challenges and possible strategies. Int. Things J. 2015, 2, 240–247. [Google Scholar] [CrossRef]
- Quadri, I.; Bagnato, A.; Brosse, E.; Sadovykh, A. Modeling methodologies for Cyber-Physical Systems: Research field study on inherent and future challenges. ADA USER 2015, 36, 246. [Google Scholar]
- Palensky, P.; Widl, E.; Elsheikh, A. Simulating cyber-physical energy systems: Challenges, tools and methods. IEEE Trans. Syst. Man Cybern. Syst. 2014, 44, 318–326. [Google Scholar] [CrossRef]
- Mart, D.; Bordel, B. Modeling and Simulation of Interactions among People and Devices in Ambient Intelligence Environments. In Proceedings of the 30th International Conference on Advanced Information Networking and Applications Workshops (WAINA), Crans-Montana, Switzerland, 23–25 March 2016; pp. 784–789. [Google Scholar]
- Kachan, D. Integration of NS-3 with MATLAB/Simulink; Luleå Tekniska Universitet: Lulea, Switzerland, 2010. [Google Scholar]
- Grasp Homepage. Available online: http://www.ticra.com/products/software/grasp (accessed on 31 August 2016).
- Lin, H.; Sambamoorthy, S.; Shukla, S.; Thorp, J.; Mili, L. Power system and communication network co-simulation for smart grid applications. In Proceedings of the Innovative Smart Grid Technologies (ISGT), Anaheim, CA, USA, 7–19 January 2011; pp. 1–6. [Google Scholar]
- Karnouskos, S.; De Holanda, T.N. Simulation of a smart grid city with software agents. In Proceedings of the Third UKSim European Symposium on Computer Modeling and Simulation, Athens, Greece, 25–27 November 2009; pp. 424–429. [Google Scholar]
- Sargent, R.G. Verification and validation of simulation models. J. Simul. 2013, 7, 12–24. [Google Scholar] [CrossRef]
- Jeruchim, M.C.; Balaban, P.; Shanmugan, K.S. Simulation of Communication Systems: Modeling, Methodology and Techniques; Springer Science & Business Media: New York, NY, USA, 2006. [Google Scholar]
- Duarte, L.M.; Kramer, J.; Uchitel, S. Model extraction using context information. In International Conference on Model Driven Engineering Languages and Systems; Springer: Berlin/Heidelberg, Germany, 2006; pp. 380–394. [Google Scholar]
- Nieto-Hidalgo, M.; Ferrández-Pastor, F.J.; García-Chamizo, J.M.; Flórez-Revuelta, F. DAI Virtual Lab: A Virtual Laboratory for Testing Ambient Intelligence Digital Service. In Proceedings of the V Congreso Internacional de Diseño, Redes de Investigación y Tecnología para Todos, Madrid, Spain, 23–25 September 2013. [Google Scholar]
- Polhill, J.G.; Parker, D.; Brown, D.; Grimm, V. Using the ODD protocol for describing three agent-based social simulation models of land-use change. J. Artif. Soc. Soc. Simul. 2008, 11, 3. [Google Scholar]
- Terna, P. Simulation tools for social scientists: Building agent based models with swarm. J. Artif. Soc. Soc. Simul. 1998, 1, 1–12. [Google Scholar]
- Duives, D.C.; Daamen, W.; Hoogendoorn, S.P. State-of-the-art crowd motion simulation models. Transp. Res. Part C Emerg. Technol. 2013, 37, 193–209. [Google Scholar] [CrossRef]
- Lasecki, W.S.; Murray, K.I.; White, S.; Miller, R.C.; Bigham, J.P. Real-time crowd control of existing interfaces. In Proceedings of the 24th annual ACM symposium on User interface software and technology, Barbara, CA, USA, 16–19 October 2011; pp. 23–32. [Google Scholar]
- Perry, R.W. Incident management systems in disaster management. Disaster Prev. Manag. Int. J. 2013, 12, 405–412. [Google Scholar] [CrossRef]
- Cioffi-Revilla, C. On the Quality of a Social Simulation Model: A Lifecycle Framework. Adv. Soc. Simul. Adv. Intell. Syst. Comput. 2014, 229, 13–23. [Google Scholar]
- Sargent, R.G. Verification and Validation of Simulation Models. In Proceedings of the 2007 Winter Simulation Conference, Washington, DC, USA, 9–12 December 2007. [Google Scholar]
- Cao, H. Development of Techniques for General Purpose Simulators. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2002. [Google Scholar]
- Alcarria, R.; Robles, T.; Morales, A.; Cedeño, E. Resolving coordination challenges in distributed mobile service executions. Int. J. Web Grid Serv. 2014, 10, 168–191. [Google Scholar] [CrossRef]
- Strasser, T.; Stifter, M.; Andrén, F.; Palensky, P. Co-simulation training platform for smart grids. IEEE Trans. Power Syst. 2014, 29, 1989–1997. [Google Scholar] [CrossRef]
- Pax, R.; Pavón, J. Multi-Agent System Simulation of Indoor Scenarios. In Proceedings of the 2015 Federated Conference on Computer Science and Information Systems (FedCSIS), Lodz, Poland, 13–16 September 2015; pp. 1757–1763. [Google Scholar]
- Pax, R.; Bonett, M.C.; Gómez-Sanz, J.J.; Pavón, J. Virtual Development of a Presence Sensor Network Using 3D Simulations. In International Conference on Smart Cities; Springer: Cham, Switzerland, 2017; pp. 154–163. [Google Scholar]
- A Framework for MultiAgent System Simulation of Indoor Scenarios. Available online: http://www.massisframework.com/ (accessed on 21 september 2017).
- Ren, C.; Yang, C.; Jin, S. Agent-based modeling and simulation on emergency evacuation. Complex Sci. 2009, 5, 1451–1461. [Google Scholar]
- Kodur, V.K.R.; Dwaikat, M. A numerical model for predicting the fire resistance of reinforced concrete beams. Cem. Concr. Compos. 2008, 30, 431–443. [Google Scholar] [CrossRef]
- Lorig, F.; Dammenhayn, N.; Müller, D.J.; Timm, I.J. Measuring and Comparing Scalability of Agent-Based Simulation Frameworks. In German Conference on Multiagent System Technologies; Springer: Cham, Switzerland, 2015; pp. 42–60. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Concept | Physical World | Social World | Cyber World |
|---|---|---|---|
| Cyber-Physical systems | x | x | |
| Social Internet-of-Things | x | x | |
| Social Environment | x | x | |
| Social sensing | x | x | |
| CPSS | x | x | x |
| Characteristics | Traditional Research Simulators | Current Commercial Simulators | Current Research Simulators | |
|---|---|---|---|---|
| Mixed Simulators | Most Common Current CPS Simulators | |||
| Include a graphic environment | No | Yes | Yes | Sometimes |
| Domain-specific knowledge is required | Yes | No | Yes | Yes |
| Include aspects of the cyber world | No | No | Yes | Yes |
| Is a stable version | Yes | Yes | No | No |
| Simulation scheme | First, all the simulation are performed and, later, results are showed | |||
| Characteristics | Social-Level Simulators | Agent-Based Simulators | ||
|---|---|---|---|---|
| Ambient Intelligence | Development of IoT Systems | Generic | ||
| Represent each people as a unit | No | Yes | Yes | Yes |
| Programming knowledge is required | No | Sometimes | Sometimes | Sometimes |
| A graphic interface is provided | Yes | Yes | Yes | Yes |
| Cyber elements may be included | No | Yes | Yes | No |
| People is the objective of the simulations | Yes | Yes | No | Yes |
| Stable tools are available | Yes | Yes | Yes | Yes |
| Simulation scheme | Results are showed as calculated in each time step | |||
| Characteristics | Traditional Network Simulators | IoT Simulators | Social IoT Simulators |
|---|---|---|---|
| Include a graphic environment | Sometimes | Yes | Yes |
| Programming abilities are required | Yes | No | No |
| Include social aspects | No | No | No |
| Is a stable version | Yes | Sometimes | No |
| Number of customizing options | High | Medium | Low |
| Simulation scheme | Event-driven, offering the logs in each step | ||
| Thematic Block | Relevant Characteristics |
|---|---|
| Application characteristics | The main subsystem (physical, cyber or social world) in the simulation Type of application (e.g., Ambient Intelligence validation or development) Possible simulation scenarios considered (buildings, cities, large facilities, etc.) |
| Development team characteristics | Knowledge about simulators programming Number of developers (available workforce) |
| Final users characteristics | Technical and programming skills Users’ profile (sector professionals, researchers or students, etc.) |
| Group | Criteria | Explanation |
|---|---|---|
| Developers‘ knowledge and users‘ abilities | Technical capacity to perform large developments (programming to modify the simulators themselves) | Developing an integrated co-simulator requires great knowledge about programming and expert people on software development. If these resources are not available, federated co-simulators are preferable |
| Technical skills of users (programming to implement the models) | If users have technical skills, they can perform the scenario division into different domains. If that is not possible, orchestrated or integrated co-simulation are the only feasible paradigms. These paradigms, moreover, help to consider a high number of different subsystems in the simulation without complicating the usability in excess. | |
| Characteristic of the selected simulation tools | Utilization of open architecture tools | If simulation tools present an open architecture, federated co-simulation may be employed. However, if all selected simulators are close architecture tools, any information could be exchanged and integrated co-simulation is the solution. |
| Availability of adequate domain-specific simulator in the state of the art | If any of the available domain-specific simulators nowadays is adequate to be integrated in the new co-simulator, integrated co-simulator is the only valid paradigm (programming the unavailable modules). | |
| Utilization of open source tools | If open architecture tools are used, and federated co-simulation is going to be employed, the use of choreographed co-simulation requires all simulators involved to be open source (as the code has to be slightly modified). | |
| Compatibility among the domain-specific tools | If open architecture tools are used, and federated co-simulation is going to be employed, the use of choreographed co-simulation requires all simulators involved to be totally compatible (use the same data formats, communication protocols, APIs, etc.). | |
| Other | Results presentation and user interaction | If orchestrated co-simulation is being performed, and if none of the modules for results presentation provided with the domain-specific simulation tools meet the needs of the new co-simulator, a third-party engine must be included |
| Application | Actions |
|---|---|
| Validation of ambient intelligence systems [91,92,93,94,122] | A more specific definition of the physical world (ambient) is necessary. In particular, physical laws for the evolution of relevant phenomena should be modeled. Besides different types of people should be also considered (depending on if they present special needs, incapacities, etc.). |
| Development of IoT systems [95] | The concept of “service” should be added in the simulation model, and a more exhaustive description of the different types of devices also would be desirable (in particular, a description of the interfaces is very important in IoT scenarios). |
| Social research [123,124] | Most elements in the cyber world can be removed (it is enough to include the concept of “device”). On the other hand, social world must be extended, including different personal and social states, different types of interrelations among people and the social evolution laws. |
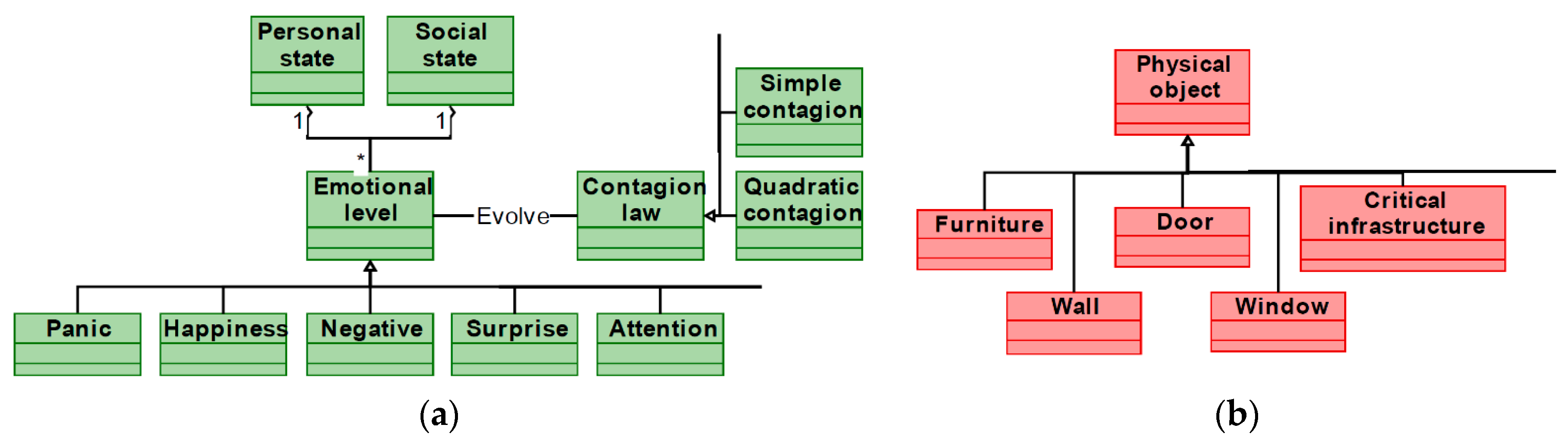
| Crowd management [125,126,127] | A detailed model for “physical object” may be important. Models for walls, doors, buildings, etc. are critical in order to manage people in the most adequate way. In addition, models for the different emotions and their propagation in crowds must be considered. |
| Social sensing [86,87,88,89,90] | Different types of sensors have to be considered, so the model must include all of them. Besides, the social world requires a more exhaustive description as mentioned in the case of “social research” and “crowd management”. |
| Coordination Mechanism | Co-Simulation Paradigm | Implementation |
|---|---|---|
| Parallel execution | All | Every tool executes in a separate host, processor or thread. Simulation calculations are performed in parallel and results are shared with the rest of simulators immediately (using the orchestrator element if necessary). |
| Stops and waits execution | Choreographed | In a certain order, every simulator makes its calculations. When all tools have performed their execution, all of them share the results with the others. |
| Orchestrated by a third-party engine | In a certain order, the engine order every simulator to execute the calculations. When each simulator finishes, it sends the results to the engine and it sends the information to the other tools. | |
| Orchestrated by one of the simulators | First, the orchestrator simulator performs its calculations and shares the results with the other tools. Then, in a certain order, it orders every simulator to execute its calculations. When each simulator finishes, it sends the results to the orchestrator and it sends the information to the other tools |
| Tasks | Criteria |
|---|---|
| Design a simulation | If simulations concern only a limited collection of scenarios, predefined layouts are the appropriate solution. If users must be enabled to design their own scenarios, additional external instruments are required (for example 3D modeling, development environments, etc.). |
| Execute and control the simulation | Text interfaces are adequate for users who performs many simulations in a row (such as in Monte-Carlo simulations). In didactic applications, or if simulations are performing one-by-one, graphical interfaces are desirable. |
| Analyze the results | Simulators which generates great amounts of data require “post-mortem” tools as no enough time is available to process and presents the results when performing the simulation. If the monitored variables are few (such as, for example, the position of the agents), then “live” tools are valid. |
| Co-Simulation Paradigm | Key Elements |
|---|---|
| Independent | Individual controls Individual results |
| Choreographed | Global scenario definition Relationship conditions |
| Orchestrated by a third-party engine | Third party engine connection status |
| Orchestrated by one of the simulators | Main simulator selector |
| Quality Parameter | Marks (0–10) | |||
|---|---|---|---|---|
| Methodological Co-Simulator | Non-Methodological simulator#1 | Non-Methodological simulator#2 | MASSIS | |
| Usability by crowd management experts | 8 | 5 | 6 | 9 |
| Facility to include new types of devices | 9 | 7 | 6 | 6 |
| Scalability to advance scenarios | 9 | 6 | 9 | 7 |
| Adequacy of the simulation model | 8 | 8 | 8 | 7 |
| Accuracy of the simulations | 7 | 8 | 8 | 8 |
| Customization | 6 | 8 | 8 | 7 |
| Interest of the presented results | 9 | 7 | 7 | 8 |
| Total | 8 | 7 | 7.4 | 7.5 |
| Important Points | Methodological | “simulator#1” | “simulator#2” | “simulator#3” |
|---|---|---|---|---|
| Maximum number of parameters without fails | 30 | 300 | 7 | 4 |
| Number of parameters 50% of fails | 310 | 440 | 40 | 30 |
| Maximum number of parameters | 500 | 620 | 440 | 440 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sánchez, B.B.; Alcarria, R.; Sánchez-Picot, Á.; Sánchez-de-Rivera, D. A Methodology for the Design of Application-Specific Cyber-Physical Social Sensing Co-Simulators. Sensors 2017, 17, 2177. https://doi.org/10.3390/s17102177
Sánchez BB, Alcarria R, Sánchez-Picot Á, Sánchez-de-Rivera D. A Methodology for the Design of Application-Specific Cyber-Physical Social Sensing Co-Simulators. Sensors. 2017; 17(10):2177. https://doi.org/10.3390/s17102177
Chicago/Turabian StyleSánchez, Borja Bordel, Ramón Alcarria, Álvaro Sánchez-Picot, and Diego Sánchez-de-Rivera. 2017. "A Methodology for the Design of Application-Specific Cyber-Physical Social Sensing Co-Simulators" Sensors 17, no. 10: 2177. https://doi.org/10.3390/s17102177
APA StyleSánchez, B. B., Alcarria, R., Sánchez-Picot, Á., & Sánchez-de-Rivera, D. (2017). A Methodology for the Design of Application-Specific Cyber-Physical Social Sensing Co-Simulators. Sensors, 17(10), 2177. https://doi.org/10.3390/s17102177