Avionic Air Data Sensors Fault Detection and Isolation by means of Singular Perturbation and Geometric Approach




Abstract
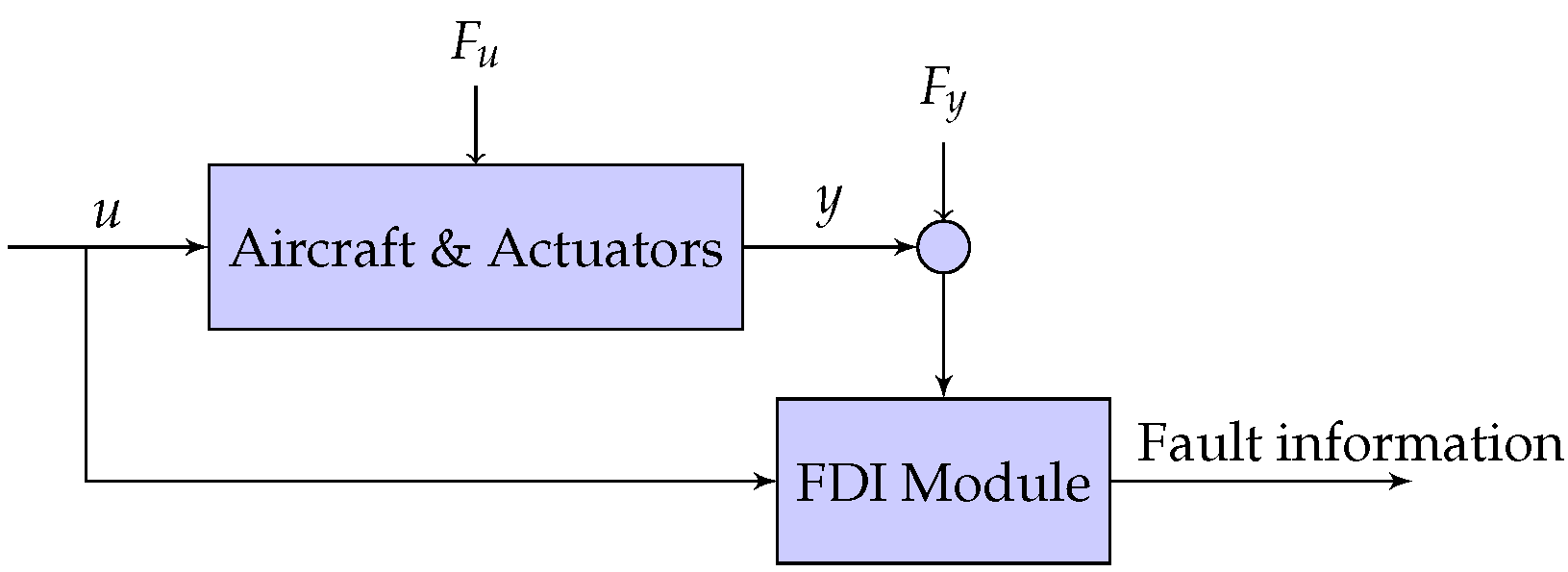
:1. Introduction
2. Nonlinear Longitudinal Aircraft Model
- given the state , the control laws are sufficiently smooth functions of the states , i.e., , and there exist a Lipschitz constant L such that ;
- the control laws are built up by two components where represents the fast component and is the slow contribution;
- the fast term is not active when , i.e., it is such that
- the slow control law, , is such that
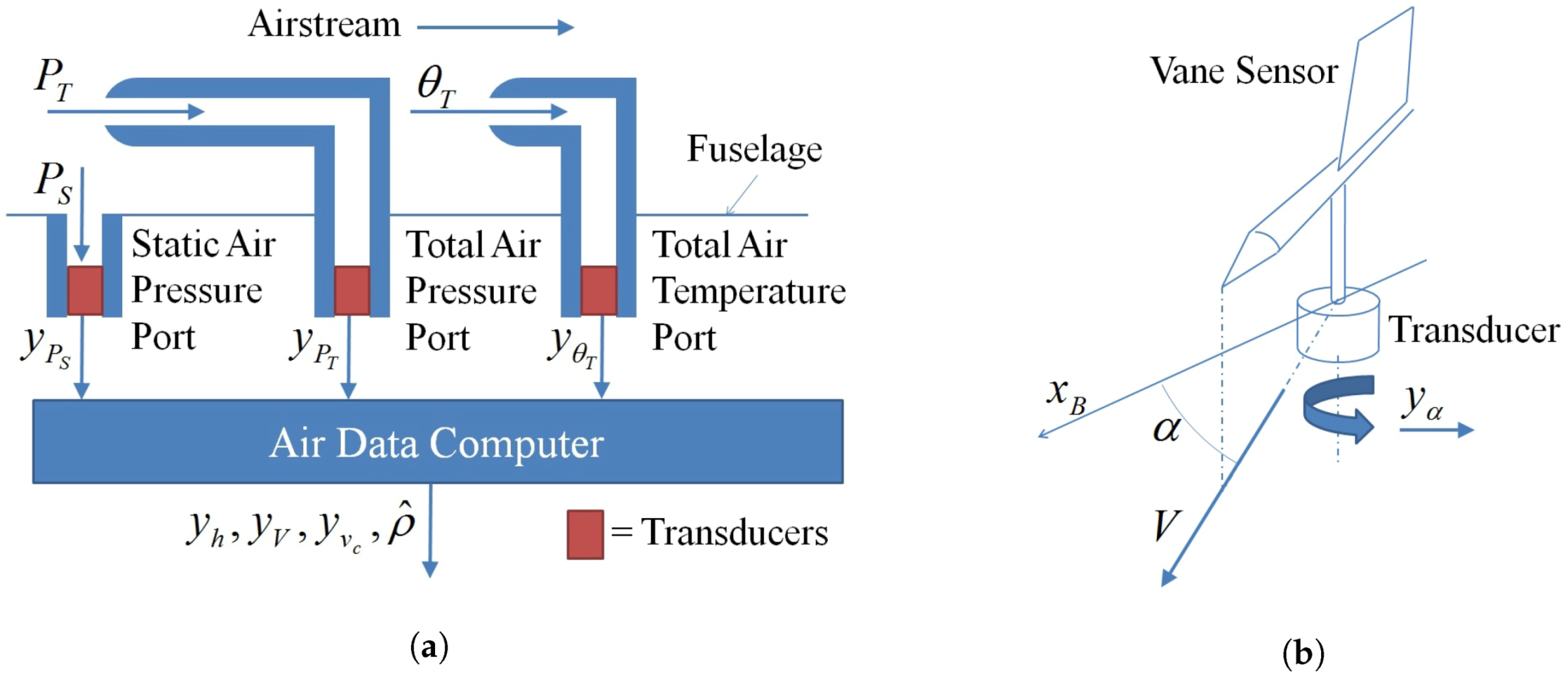
3. Air Data System
Air Data System Faults
4. NLGA FDI for Singularly Perturbed Aircraft Model
- given a set
- given the fault set , define the subset with and the generalized disturbance ;
- given the equivalent fault set associated to , define the subset associated to , i.e., , and the generalized disturbance associated to ;
- associate to the sets and their relative input vector fields and respectively:
- if the generalized faults set is detectable and a suitable change of coordinate can be determined.
NLGA Combined with Singular Perturbations
5. Simulation Results
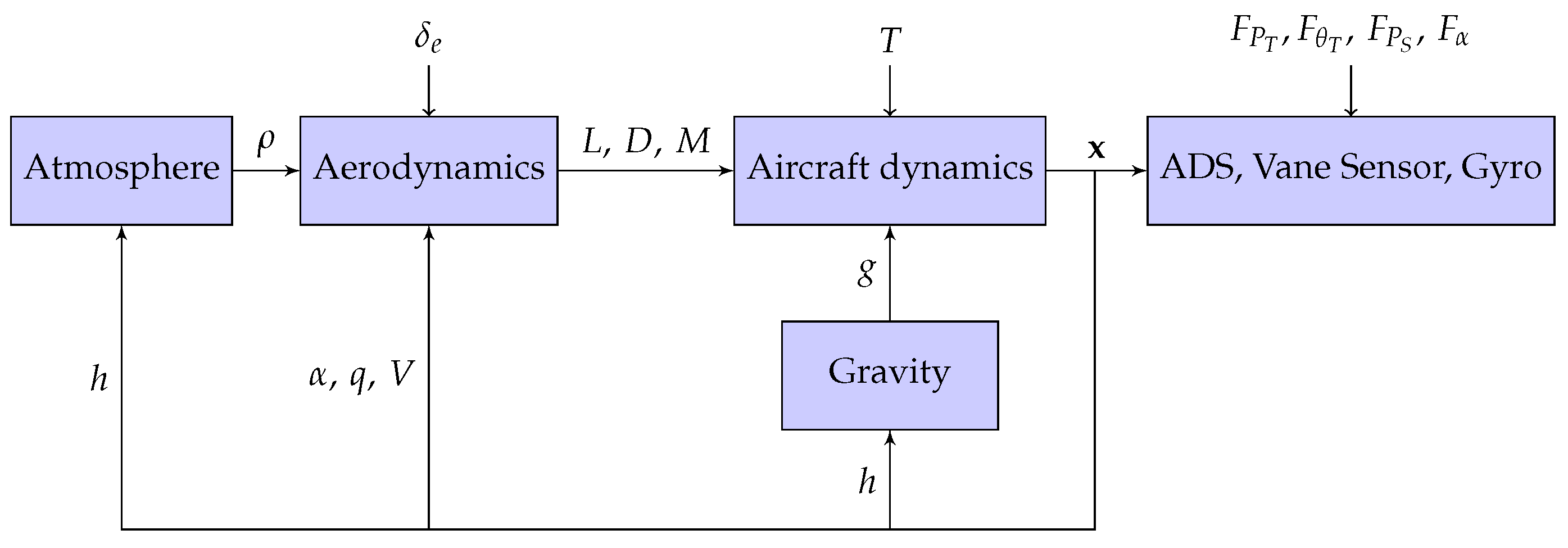
- Aircraft Dynamics: The dynamics of the aircraft, seen as a rigid body with six degree of freedom, is altered by torques and forces inducing accelerations which, integrated two times, generate speeds and positions. Euler angles describes the attitude of the aircraft;
- Aerodynamics: The NASA reference [40] graphically reports the aerodynamic coefficients of lift L, drag D and pitch momentum M which are functions of the angle of attack and the thrust coefficient . The simulator implements these coefficients by means of look-up tables;
- the pitch rate is provided by means of one gyroscope of an IMU (Inertial Measurement Unit). The measurement errors are comprehensive of non unitary scale factor, alignment error (random), g-sensitivity, additive white noise and gyro drift;
- Air Data System (ADS):
- -
- The true air-speed is affected by calibration error of the differential pressure sensor plus additive white noise;
- -
- The altitude measurement is corrupted by calibration error of the static pressure port plus additive white noise;
- -
- The attack angle vane sensor is influenced by calibration errors plus additive white noise.
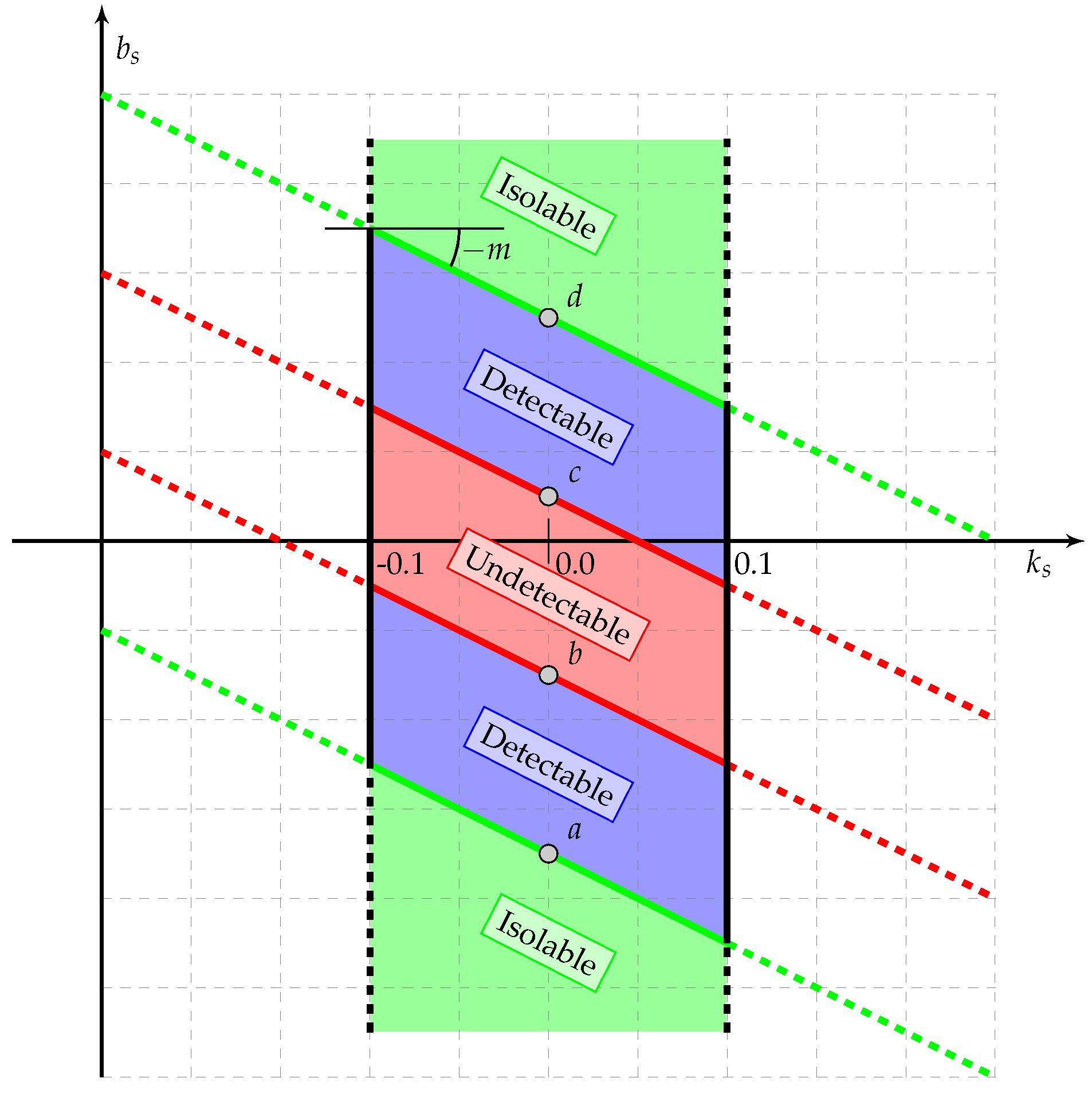
5.1. Sensitivity Analysis
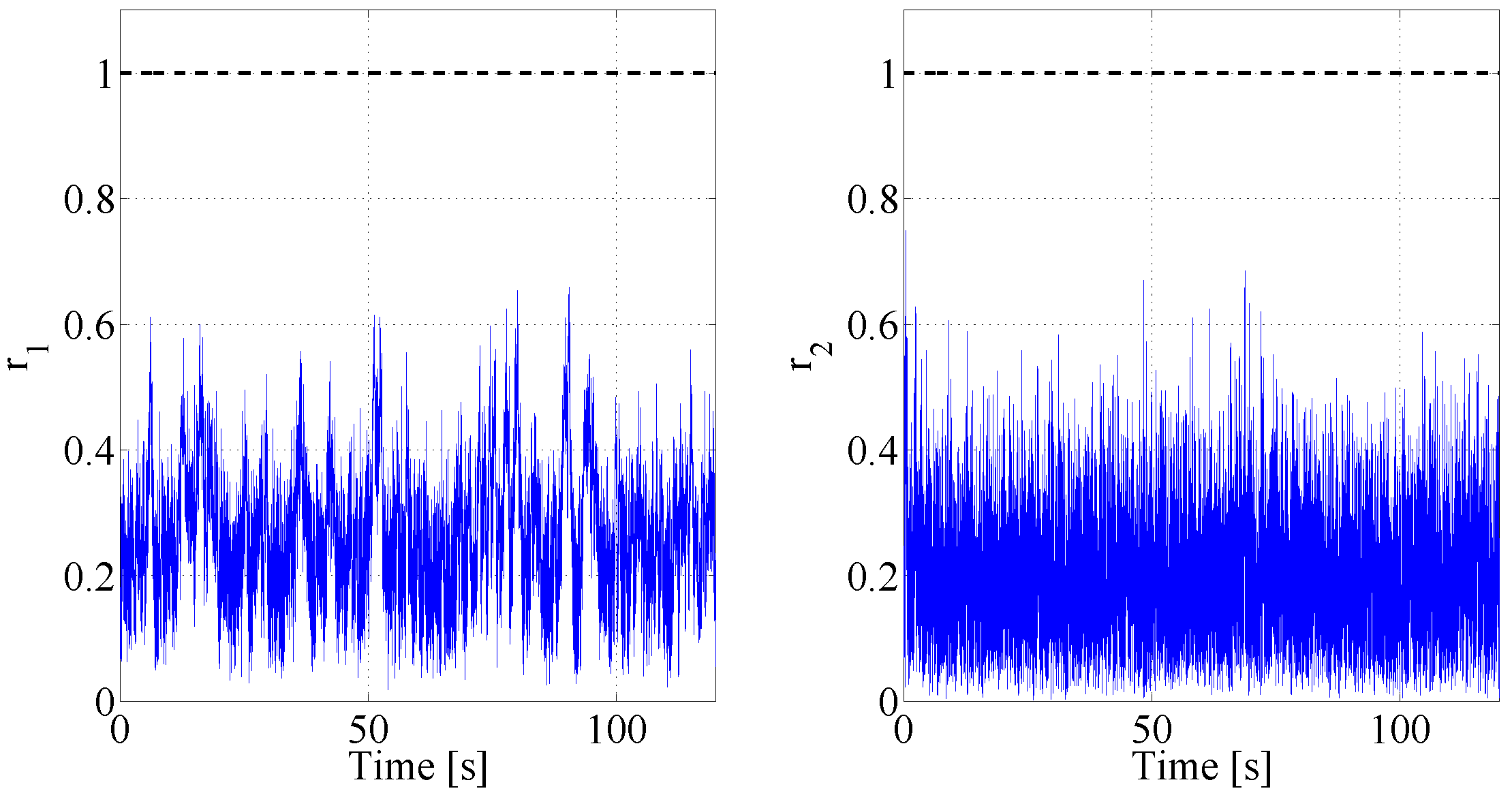
- an undetectable fault parameter set defined as such that each binary residual , with , so leading to for each ;
- a detectable fault parameter set, , defined as the fault set for which the detection is guaranteed (but not the isolability). In particular, there exist a couple of fault parameters and with with , respectively belonging to and for which the residuals configurations and are non-empty but equal thus not providing the isolability;
- an isolable fault parameter set, , identified as the fault parameter set such that the residuals configuration is unique. In particular, for each couple of fault parameters and with with , respectively belonging to and the residuals configurations and are non-empty and different.
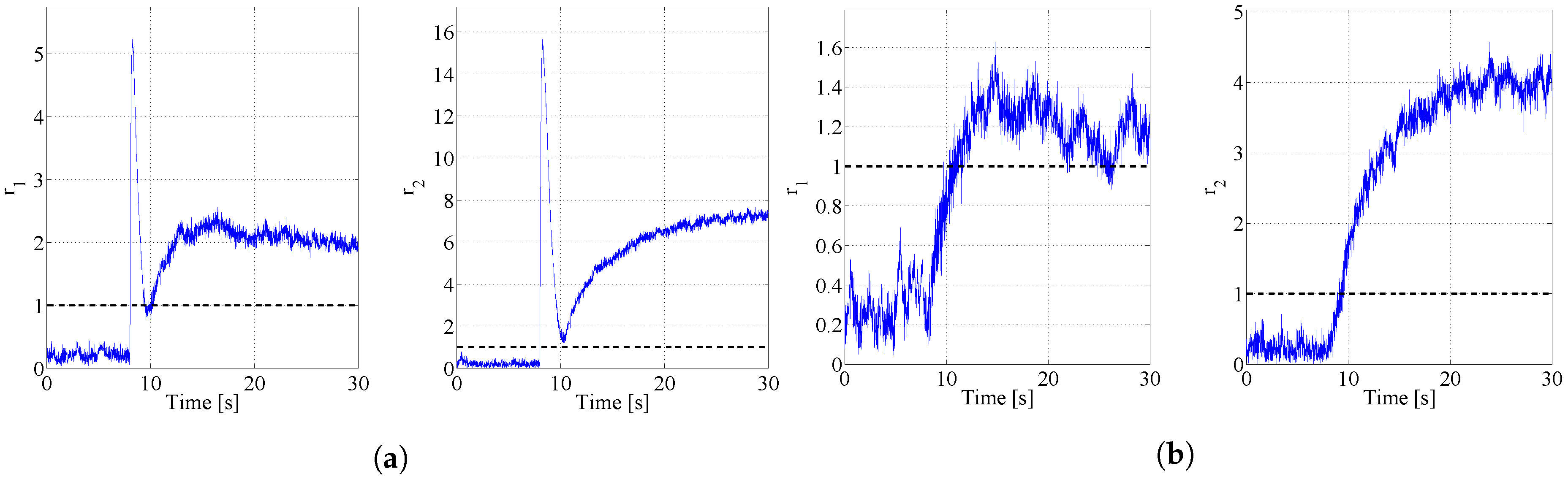
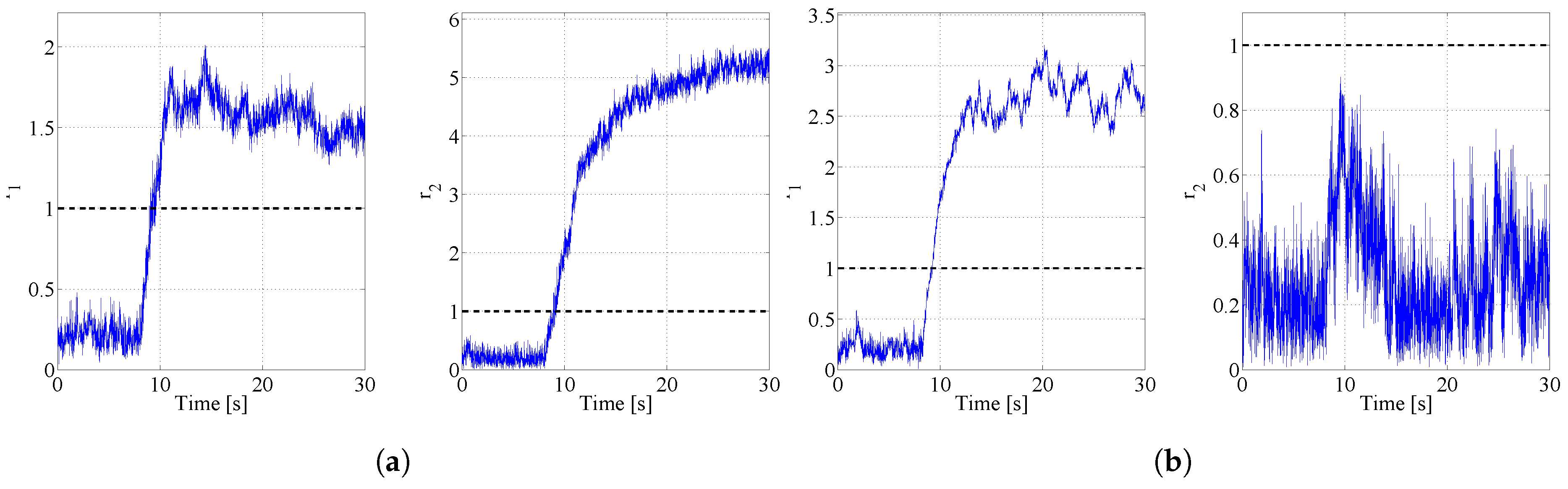
5.2. Fault Isolation Performance
- Missed Fault Rate (MFR): division of the number of not detected faults over the total number of simulated faults;
- False Alarm Rate (FAR): ratio of the number of faults which have been detected over the number of simulations performed in absence of faults;
- Detection Rate (DR): number of faults that have been detected over the total number of simulations in presence of faults;
- Isolation Rate (IR): division of the number of faults which have been correctly isolated over the total number of simulations in presence of faults;
- Wrong Isolation Rate (WIR): ratio of the number of faults which have been wrongly isolated over total number of simulations in presence of faults.
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Houck, D.; Atlas, L. Air data sensor failure detection. In Proceedings of the 17 AIAA/IEEE/SAE Digital Avionics Systems Conference, Bellevue, WA, USA, 31 October–7 November 1998. [Google Scholar]
- Van Eykeren, L.; Chu, Q. Air Data Sensor Fault Detection using Kinematic Relations. In Advances in Aerospace Guidance, Navigation and Control; Springer: Heidelberg, Germany, 2013; pp. 183–197. [Google Scholar]
- Eubank, R.D.; Atkins, E.M.; Ogura, S. Fault detection and fail-safe operation with a multiple-redundancy air-data system. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Toronto, ON, Canada, 2–5 August 2010; pp. 1–14. [Google Scholar]
- Casteleiro-Roca, J.L.; Calvo-Rolle, J.L.; Méndez Pérez, J.A.; Roqueñí Gutiérrez, N.; de Cos Juez, F.J. Hybrid Intelligent System to Perform Fault Detection on BIS Sensor During Surgeries. Sensors 2017, 17, 179. [Google Scholar] [CrossRef] [PubMed]
- Jeon, N.; Lee, H. Integrated Fault Diagnosis Algorithm for Motor Sensors of In-Wheel Independent Drive Electric Vehicles. Sensors 2016, 16, 2106. [Google Scholar] [CrossRef] [PubMed]
- Huang, G.; Luo, Y.P.; Zhang, C.F.; Huang, Y.S.; Zhao, K.H. Current sensor fault diagnosis based on a sliding mode observer for PMSM driven systems. Sensors 2015, 15, 11027–11049. [Google Scholar] [CrossRef] [PubMed]
- Santos, P.; Villa, L.F.; Reñones, A.; Bustillo, A.; Maudes, J. An SVM-based solution for fault detection in wind turbines. Sensors 2015, 15, 5627–5648. [Google Scholar] [CrossRef] [PubMed]
- Lu, F.; Huang, J.; Xing, Y. Fault diagnostics for turbo-shaft engine sensors based on a simplified on-board model. Sensors 2012, 12, 11061–11076. [Google Scholar] [CrossRef] [PubMed]
- Heredia, G.; Ollero, A. Virtual sensor for failure detection, identification and recovery in the transition phase of a morphing aircraft. Sensors 2010, 10, 2188–2201. [Google Scholar] [CrossRef] [PubMed]
- Menke, T.E.; Maybeck, P.S. Sensor/actuator failure detection in the Vista F-16 by multiple model adaptive estimation. IEEE Trans. Aerosp. Electron. Syst. 1995, 31, 1218–1229. [Google Scholar] [CrossRef]
- Favre, C. Fly-by-wire for commercial aircraft: The Airbus experience. Int. J. Control 1994, 59, 139–157. [Google Scholar] [CrossRef]
- Brière, D.; Traverse, P. AIRBUS A320/A330/A340 electrical flight controls—A family of fault-tolerant systems. In Proceedings of the Twenty-Third International Symposium on Fault-Tolerant Computing, Toulouse, France, 22–24 June 1993; pp. 616–623. [Google Scholar]
- Wilbers, D.M.; Speyer, J.L. Detection filters for aircraft sensor and actuator faults. In Proceedings of the IEEE International Conference on Control and Applications, Jerusalem, Israel, 3–6 April 1989; pp. 81–86. [Google Scholar]
- Bonfè, M.; Castaldi, P.; Geri, W.; Simani, S. Fault detection and isolation for on-board sensors of a general aviation aircraft. Int. J. Adapt. Control Signal Process. 2006, 20, 381–408. [Google Scholar] [CrossRef]
- Marcos, A.; Balas, G. A Boeing 747-100/200 Aircraft Fault Tolerant and Fault Diagnostic Benchmark; Technical Report AEM-UoM-2003-1; University of Minnesota: Minneapolis, MN, USA, 2003. [Google Scholar]
- Ganguli, S.; Papageorgiou, G.; Glavaski, S.; Elgersma, M. Piloted Simulation of Fault, Detection, Isolation, and Reconfiguration Algorithms for a Civil Transport Aircraft. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, San Francisco, CA, USA, 15–18 August 2005; p. 5936. [Google Scholar]
- Ganguli, S.; Papageorgiou, G.; Glavaski, S. Aircraft fault detection, isolation and reconfiguration in the presence of measurement errors. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Keystone, CO, USA, 21–24 August 2006; p. 6551. [Google Scholar]
- Baldi, P.; Castaldi, P.; Mimmo, N.; Simani, S. A new aerodynamic decoupled frequential FDIR methodology for satellite actuator faults. Int. J. Adapt. Control Signal Process. 2014, 28, 812–832. [Google Scholar] [CrossRef]
- Berdjag, D.; Cieslak, J.; Zolghadri, A. Fault diagnosis and monitoring of oscillatory failure case in aircraft inertial system. Control Eng. Pract. 2012, 20, 1410–1425. [Google Scholar] [CrossRef]
- Zolghadri, A.; Henry, D.; Cieslak, J.; Efimov, D.; Goupil, P. Fault Diagnosis and Fault-Tolerant Control and Guidance for Aerospace Vehicles; Springer: London, UK, 2014. [Google Scholar]
- Van Eykeren, L.; Chu, Q. Sensor fault detection and isolation for aircraft control systems by kinematic relations. Control Eng. Pract. 2014, 31, 200–210. [Google Scholar] [CrossRef]
- McClary, C.R.; Walborn, J. Fault-tolerant air data inertial reference system development results. In Proceedings of the IEEE Position Location and Navigation Symposium, Las Vegas, NV, USA, 11–15 April 1994; pp. 31–36. [Google Scholar]
- Rohloff, T.J.; Whitmore, S.A.; Catton, I. Fault-tolerant neural network algorithm for flush air data sensing. J. Aircr. 1999, 36, 541–549. [Google Scholar] [CrossRef]
- Isermann, R. Fault-Diagnosis Systems: An Introduction from Fault Detection to Fault Tolerance; Springer Science & Business Media: Berlin, Germany, 2006. [Google Scholar]
- Goupil, P.; Marcos, A. Advanced Diagnosis for Sustainable Flight Guidance and Control: The European ADDSAFE Project; Technical Report, SAE Technical Paper; SAE International: Warrendale, PA, USA, 2011. [Google Scholar]
- Marcos, A. Advanced fault diagnosis for sustainable flight guidance and control. In Proceedings of the 6th European Aeronautics Days, AERODAYS, Madrid, Spain, 21 March 2011. [Google Scholar]
- Chadli, M.; Abdo, A.; Ding, S.X. H−/H∞ fault detection filter design for discrete-time Takagi–Sugeno fuzzy system. Automatica 2013, 49, 1996–2005. [Google Scholar] [CrossRef]
- Li, L.; Chadli, M.; Ding, S.X.; Qiu, J.; Yang, Y. Diagnostic Observer Design for TS Fuzzy Systems: Application to Real-Time Weighted Fault Detection Approach. IEEE Trans. Fuzzy Syst. 2017. [Google Scholar] [CrossRef]
- Youssef, T.; Chadli, M.; Karimi, H.; Wang, R. Actuator and sensor faults estimation based on proportional integral observer for TS fuzzy model. J. Frankl. Inst. 2017, 354, 2524–2542. [Google Scholar] [CrossRef]
- Chadli, M.; Davoodi, M.; Meskin, N. Distributed state estimation, fault detection and isolation filter design for heterogeneous multi-agent linear parameter-varying systems. IET Control Theory Appl. 2016, 11, 254–262. [Google Scholar] [CrossRef]
- De Persis, C.; Isidori, A. A geometric approach to nonlinear fault detection and isolation. IEEE Trans. Autom. Control 2001, 46, 853–865. [Google Scholar] [CrossRef]
- Bonfè, M.; Castaldi, P.; Mimmo, N.; Simani, S. Active fault tolerant control of nonlinear systems: The cart-pole example. Int. J. Appl. Math. Comput. Sci. 2011, 21, 441–445. [Google Scholar] [CrossRef]
- Khalil, H.K.; Grizzle, J. Nonlinear Systems; Prentice Hall: Upper Saddle River, NJ, USA, 1996; Volume 3. [Google Scholar]
- Mattone, R.; De Luca, A. Nonlinear fault detection and isolation in a three-tank heating system. IEEE Trans. Control Syst. Technol. 2006, 14, 1158–1166. [Google Scholar] [CrossRef]
- Freeman, P.; Seiler, P.; Balas, G.J. Air data system fault modeling and detection. Control Eng. Pract. 2013, 21, 1290–1301. [Google Scholar] [CrossRef]
- Stevens, B.L.; Lewis, F.L.; Johnson, E.N. Aircraft Control and Simulation: Dynamics, Controls Design, and Autonomous Systems; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- U.S. Government Printing Office. U.S. Standard Atmosphere; U.S. Government Printing Office: Washington, DC, USA, 1976.
- Steward, G.W.; Sun, J.-G. Matrix Perturbation Theory; Elsevier: Amsterdam, The Netherlands, 1990. [Google Scholar]
- Sontag, E.D. Input to state stability: Basic concepts and results. In Nonlinear and Optimal Control Theory; Springer: Berlin/Heidelberg, Germany, 2008; pp. 163–220. [Google Scholar]
- Fink, M.P.; Freeman, D.C. Full-Scale Wind-Tunnel Investigation of Static Longitudinal and Lateral Characteristics of a Light Twin-Engine Airplane; Number TN D-4983, NASA Technical Note; The National Aeronautics and Space Administration: Washington, DC, USA, 1969.
- Koziol, J. Simulation Model For The Piper PA-30 Light Maneuverable Aircraft in the Final Approach; Number DOT-TSC-FAA-71-11, NASA Technical Memorandum; National Aeronautics and Space Administration: Washington, DC, USA, 1971.
- Gray, H. Wind Tunnel Test of Single and Dual Rating Tractor Propellers at Low Blade Angles of Two and Three Blade Tractor Propellers at Blade Angles up to 60°; Number L-316; NACA: Boston, MA, USA, 1943. [Google Scholar]
- World Geodetic System 1984, Its Definition and Relationship with Local Geodetic Systems; Number NIMA TR8350.2; Department of Defense: Washington, DC, USA, 1984.
- Titterton, D.; Weston, J.L. Strapdown Inertial Navigation Technology; IET: Stevenage, UK, 2004; Volume 17. [Google Scholar]
- Kayton, M.; Fried, W.R. Avionics Navigation Systems; John Wiley & Sons: Hoboken, NJ, USA, 1997. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Residual | ||
|---|---|---|
| X | X | |
| X | 0 |
| Residual | Weights Matrix |
|---|---|
| Par. | Units | Minimum Value | Nominal Value | Maximum Value |
|---|---|---|---|---|
| m | kg | 1630 | ||
| kg·m2 | 2446.1 | 2574.8 | 2703.5 |
| [deg] | −3.5 | −1.5 | 0.5 | 2.5 | 4.5 | 6.5 | 8.5 | 10.5 | 12.5 | 14.5 | 16.5 | 18.5 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| min. | 0.03325 | 0.0285 | 0.0285 | 0.03325 | 0.04275 | 0.057 | 0.08075 | 0.114 | 0.152 | 0.209 | 0.2755 | 0.361 |
| nom. | 0.035 | 0.03 | 0.03 | 0.035 | 0.045 | 0.06 | 0.085 | 0.12 | 0.16 | 0.22 | 0.29 | 0.38 |
| max. | 0.03675 | 0.0315 | 0.0315 | 0.03675 | 0.04725 | 0.063 | 0.08925 | 0.126 | 0.168 | 0.231 | 0.3045 | 0.399 |
| Variable | Units | m | a | b | c | d |
|---|---|---|---|---|---|---|
| Pa | 89,875 | −150.0 | −20.0 | 25.0 | 155.0 | |
| Pa | 91,876 | −51.5 | −13.0 | 14.5 | 55.5 | |
| °C | 10 | −7.3 | −2.0 | 2.0 | 7.2 | |
| deg | 2.1 | −0.22 | −0.05 | 0.07 | 0.17 |
| Var. | MFR | FAR | DR | IR | WIR | ||
|---|---|---|---|---|---|---|---|
| −1921 | 707 | 1.71 | 2.98 | 98.29 | 88.58 1 | 9.70 1 | |
| −284 | 1667 | 1.41 | 3.01 | 98.59 | 95.85 1 | 2.74 1 | |
| −71 | 72.5 | 2.79 | 3.12 | 97.21 | 89.90 1 | 7.32 1 | |
| −4.8 | 8 | 0.94 | 2.75 | 99.06 | 96.95 | 2.11 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Castaldi, P.; Mimmo, N.; Simani, S. Avionic Air Data Sensors Fault Detection and Isolation by means of Singular Perturbation and Geometric Approach. Sensors 2017, 17, 2202. https://doi.org/10.3390/s17102202
Castaldi P, Mimmo N, Simani S. Avionic Air Data Sensors Fault Detection and Isolation by means of Singular Perturbation and Geometric Approach. Sensors. 2017; 17(10):2202. https://doi.org/10.3390/s17102202
Chicago/Turabian StyleCastaldi, Paolo, Nicola Mimmo, and Silvio Simani. 2017. "Avionic Air Data Sensors Fault Detection and Isolation by means of Singular Perturbation and Geometric Approach" Sensors 17, no. 10: 2202. https://doi.org/10.3390/s17102202
APA StyleCastaldi, P., Mimmo, N., & Simani, S. (2017). Avionic Air Data Sensors Fault Detection and Isolation by means of Singular Perturbation and Geometric Approach. Sensors, 17(10), 2202. https://doi.org/10.3390/s17102202