The SAR Payload Design and Performance for the GF-3 Mission


Abstract
:1. Introduction
2. Requirements
3. Working Modes
3.1. Observing Modes
3.1.1. P Mode
3.1.2. UF Mode
3.1.3. Quad-Polarization Stripmap Modes
3.1.4. WV Mode
3.1.5. Dual-Polarization Stripmap Modes
3.1.6. ScanSAR Modes
3.2. Inner Calibration Modes
4. SAR Payload Design
4.1. Overview
4.2. SAR Antenna Subsystem
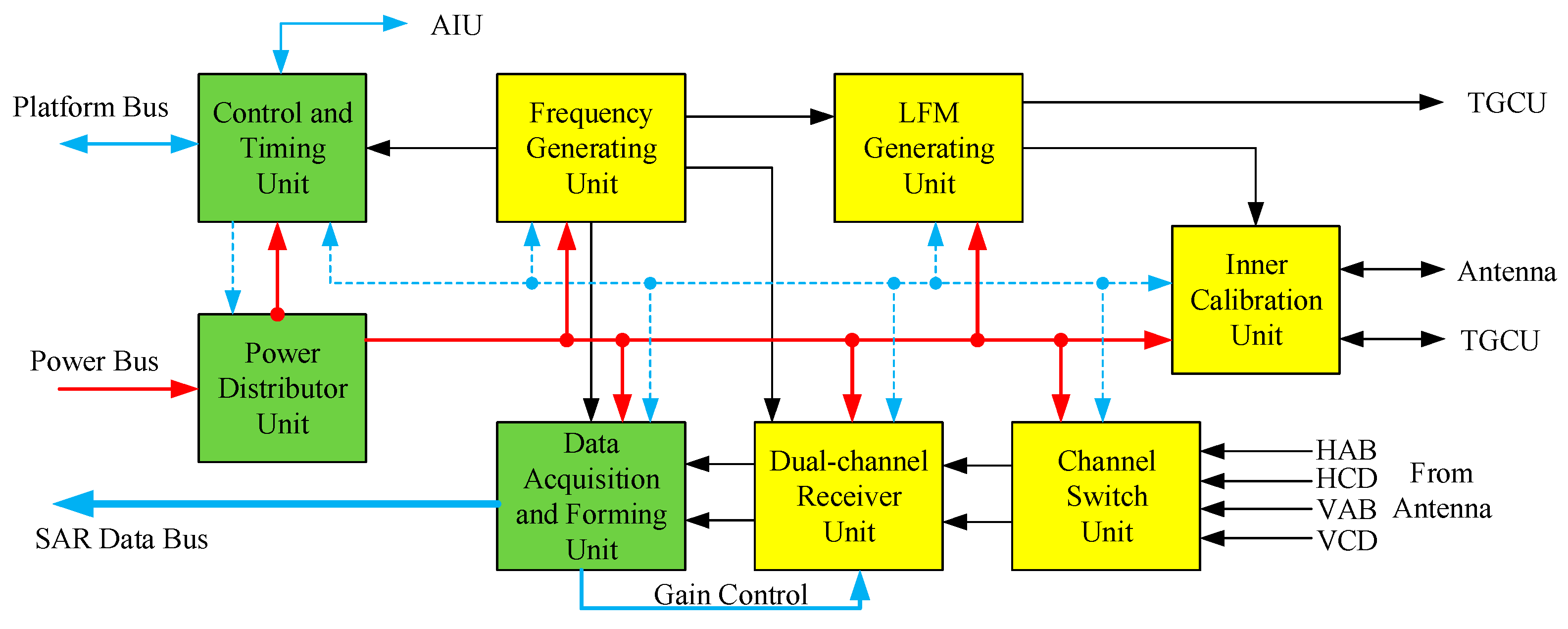
4.3. SAR Electronics Subsystem
- Redundancy control, scheduling, mode definition, timing control;
- Transmitted signal generation;
- Received signal conditioning;
- Quantization, data compression, data formatting.
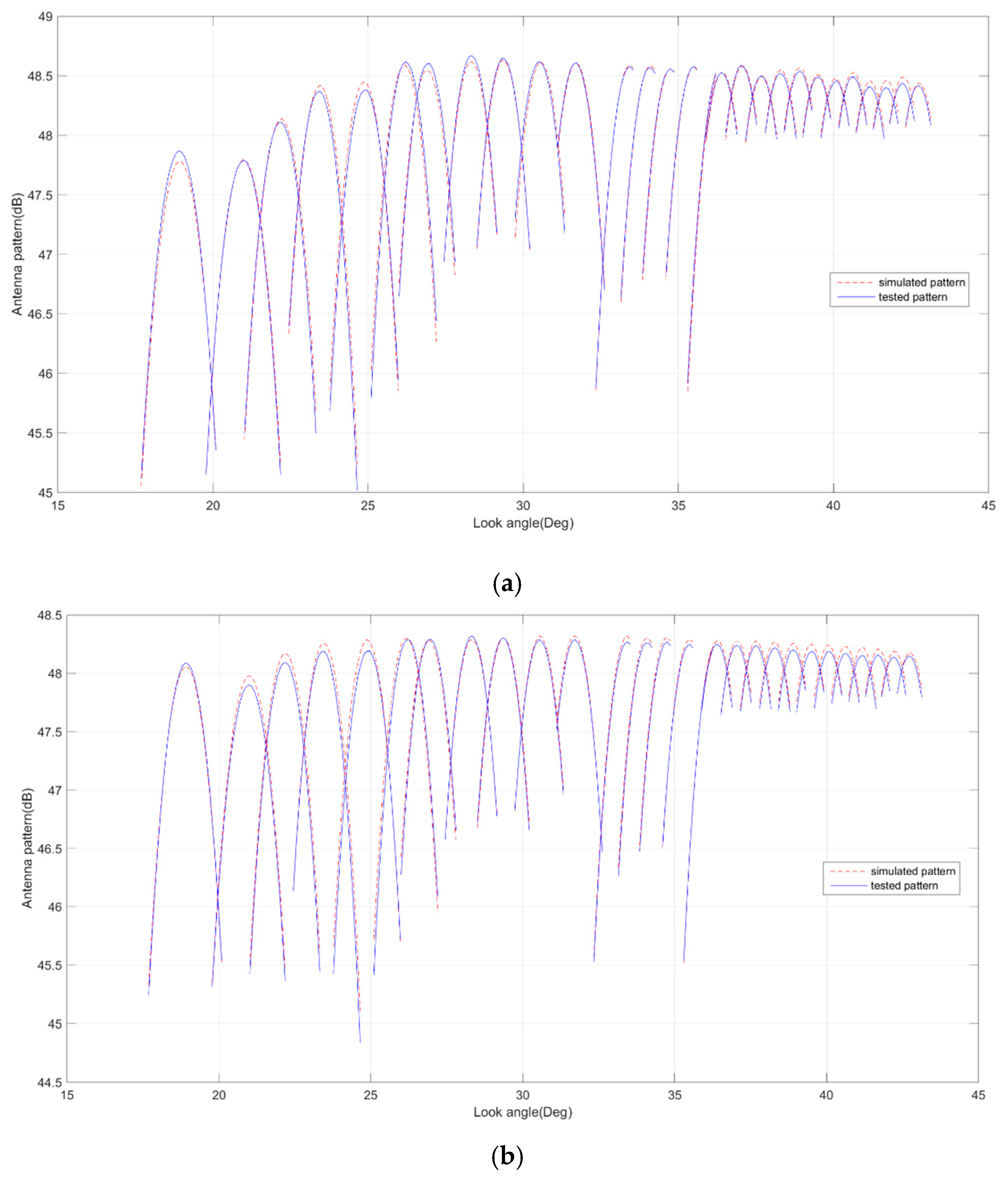
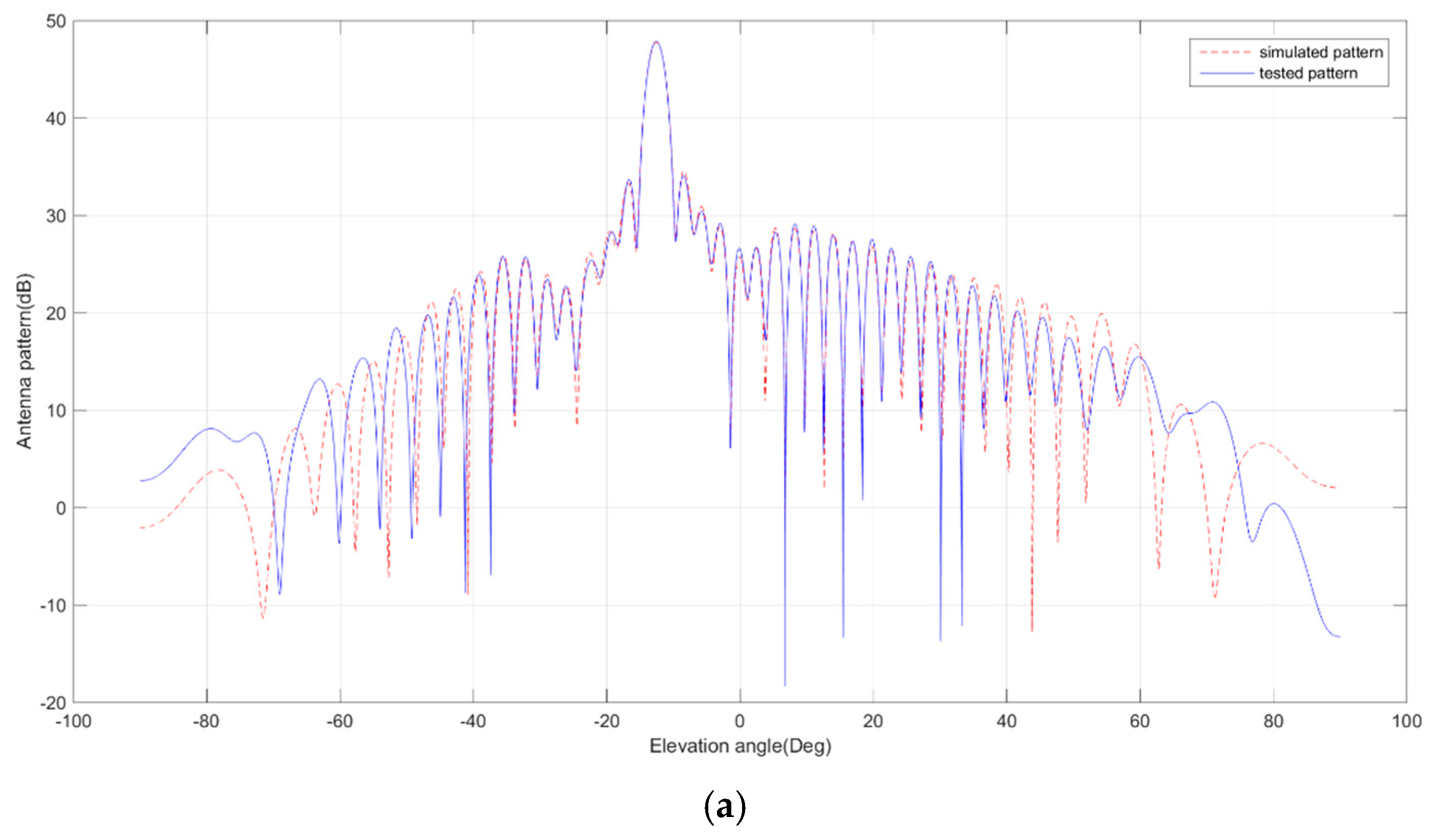
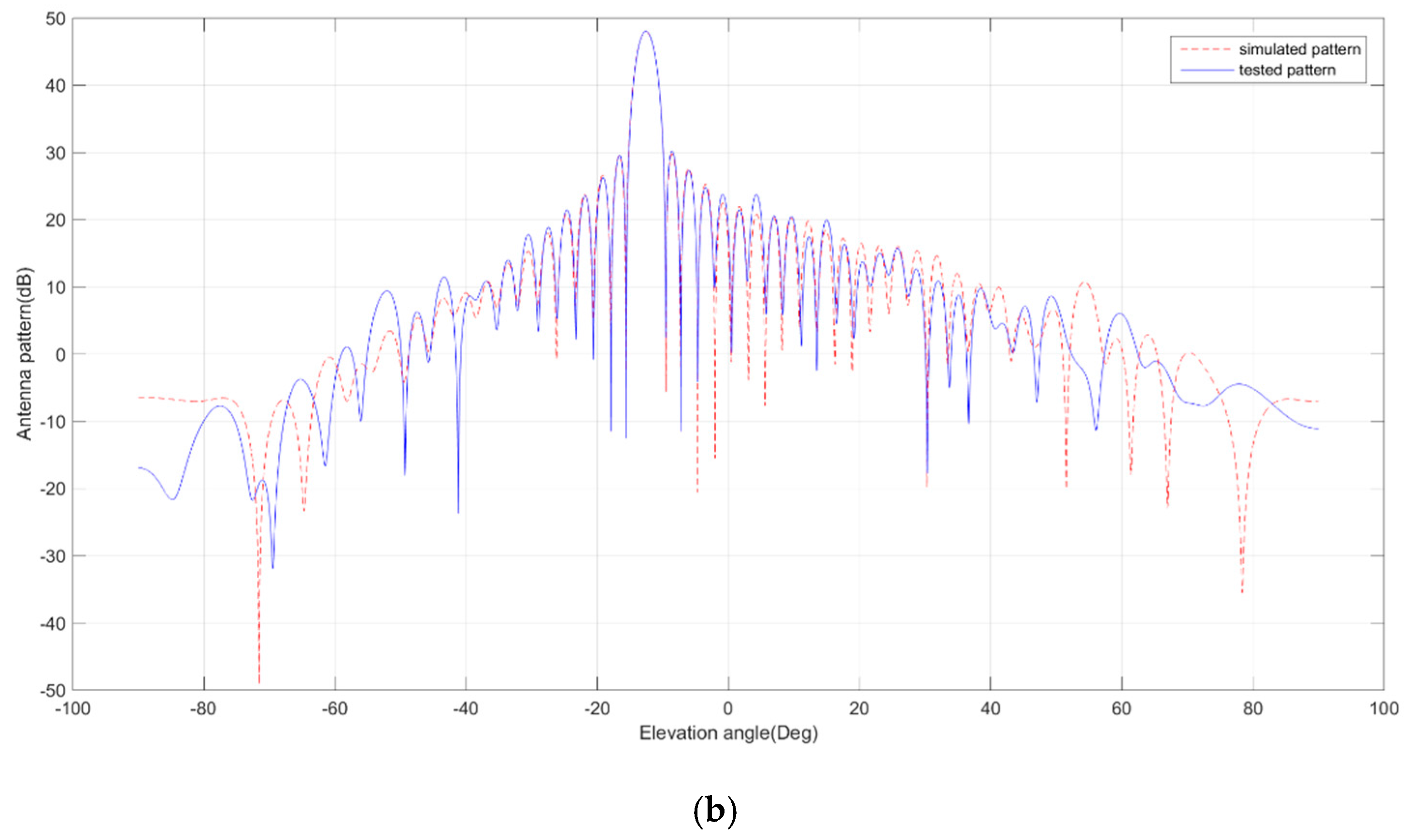
5. Antenna Model
6. Performance
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Curlander, J.C.; McDonough, R.N. Synthetic Aperture Radar: System and Signal Processing; Jone Wiley & Sons: New York, NY, USA, 1991. [Google Scholar]
- Zhang, Q.J. Polarimetric Microwave Remote Sensing; China Aerospace Press: Beijing, China, 2015. [Google Scholar]
- Carrara, W.G.; Goodman, R.S.; Majewski, R.M. Spotlight Synthetic Aperture Radar; Artech House: London, UK, 1995. [Google Scholar]
- Krieger, G.; Huber, S.; Villano, M.; de Almeida, F.Q.; Younis, M.; López-Dekker, P.; Prats, P.; Rodriguez-Cassola, M.; Moreira, A. SIMO and MIMO system architectures and modes for high-resolution ultra-wide-swath SAR imaging. In Proceedings of the EUSAR 2016: 11th European Conference on Synthetic Aperture Radar, Hamburg, Germany, 6–9 June 2016; pp. 1–6. [Google Scholar]
- Munson, D.C.; Visentin, R.L. A signal processing view of strip-mapping synthetic aperture radar. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 2131–2147. [Google Scholar] [CrossRef]
- Dai, B.W.; Wang, X.L.; Yang, R.L. The study of new operation modes for spaceborne polarimetric SAR system. In Proceedings of the IGARSS 2000—IEEE 2000 International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 24–28 July 2000; pp. 2316–2318. [Google Scholar]
- Zakharov, A.I. Comparison of multipolarization SAR systems depending on the way of the full scattering matrix measurements. In Proceedings of the IGARSS 2003—IEEE 2003 International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; pp. 4419–4421. [Google Scholar]
- Lehner, S.; Schulz-Stellenfleth, J.; Schttler, J.B.; Breit, H.; Horstmann, J. Wind and wave measurements using complex ERS-2 wave mode data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2246–2257. [Google Scholar] [CrossRef]
- Kerbaol, V.; Chapron, B.; Vachon, P.W. Analysis of ERS-1/2 synthetic aperture radar wave mode imagettes. J. Geophys. Res. 1998, 103, 7833–7846. [Google Scholar] [CrossRef]
- Moore, R.K.; Claassen, J.P.; Lin, Y.H. Scanning spaceborne synthetic aperture radar with integrated radiometer. IEEE Trans. Aerosp. Electron. Syst. 1981, 17, 410–420. [Google Scholar] [CrossRef]
- Fiedler, H.; Boerner, E.; Mittermayer, J.; Krieger, G. Total zero Doppler Steering—A new method for minimizing the Doppler centroid. IEEE Geosci. Remote Sens. Lett. 2005, 2, 141–145. [Google Scholar] [CrossRef]
- Boerner, E.; Fiedler, H.; Krieger, G.; Mittermayer, J. A new method for Total Zero Doppler Steering. In Proceedings of the 2004 IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004; pp. 1526–1529. [Google Scholar]
- Fiedler, H.; Boerner, E.; Mittermayer, J.; Krieger, G. Total zero Doppler steering. In Proceedings of the 5th European Conference on Synthetic Aperture Radar, Ulm, Germany, 25–27 May 2004; pp. 481–484. [Google Scholar]
- Johnson, R.C.; Jasik, H. Antenna Engineering Handbook; McGraw-Hill: New York, NY, USA, 1984. [Google Scholar]
- Wei, W.; Zhong, S.S.; Zhang, Y.M.; Liang, X.L. A broadband slotted ridge waveguide antenna array. IEEE Trans. Antennas Propag. 2006, 8, 1567–1572. [Google Scholar]
- Ho, K.C.; Chan, Y.T.; Inkol, R. A digital quadrature demodulation system. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 1218–1227. [Google Scholar] [CrossRef]
- Liu, J.; Qiu, X.; Hong, W. Automated ortho-rectified SAR image of GF-3 satellite using Reverse-Range-Doppler method. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 4445–4448. [Google Scholar]
- Shao, W.; Sheng, Y.; Sun, J. Preliminary assessment of wind and wave retrieval from Chinese Gaofen-3 SAR imagery. Sensors 2017, 17, 1705. [Google Scholar] [CrossRef] [PubMed]
- Pan, Z.; Liu, L.; Qiu, X.; Lei, B. Fast vessel detection in Gaofen-3 SAR images with ultrafine strip-map mode. Sensors 2017, 17, 1578. [Google Scholar] [CrossRef] [PubMed]
- Jin, T.; Qiu, X.; Hu, D.; Ding, C. Unambiguous imaging of static scenes and moving targets with the first Chinese dual-channel spaceborne SAR sensor. Sensors 2017, 17, 1709. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Observing Mode | Incidence Angle (°) | Nominal Resolution 1 (m) | Nominal Swath (km) | Polarization |
|---|---|---|---|---|
| Spotlight (P) | 20~50 | 1 | 10 × 10 2 | Single |
| Ultra-fine stripmap (UF) | 20~50 | 3 | 30 | Single |
| Fine stripmap (F) | 19~50 | 5 | 50 | Dual |
| Wide fine stripmap (WF) | 19~50 | 10 | 100 | Dual |
| Standard stripmap (S) | 17~50 | 25 | 130 | Dual |
| Narrow ScanSAR (NS) | 17~50 | 50 | 300 | Dual |
| Wide ScanSAR (WS) | 17~50 | 100 | 500 | Dual |
| Global observation (G) | 17~53 | 500 | 650 | Dual |
| Quad-pol stripmap (Q) | 20~41 | 8 | 30 | Quad |
| Wide quad-pol stripmap(WQ) | 20~38 | 25 | 40 | Quad |
| Wave (WV) | 20~41 | 10 | 5 × 5 2 | Quad |
| Expanded incidence angle(E) | 10~20 | 25 | 130 | Dual |
| 50~60 | 25 | 80 | Dual |
| Parameter | Value |
|---|---|
| Center Frequency | 5.4 GHz |
| Polarization | single, dual, quad |
| Antenna Size | 15 m (A) × 1.232 m (E) |
| Number of Panels | 4 |
| Array Columns (Azimuth) | 24 |
| Array Rows (Elevation) | 64 (32 in H, 32 in V) |
| Radio Frequency (RF) Peak Power | 15,360 W |
| Average Power Consumption | 8000 W max |
| Pulse Width | 10–60 us (programmable) |
| Signal Bandwidth | 2~240 MHz (programmable) |
| Transmit Duty Cycle | 20% max |
| Receiver Noise Figure (at Module Input) | 2.5 dB max |
| Receiver Channels | 2 |
| Pulse Repetition Frequency | 1000~6000 Hz (programmable) |
| Sampling Frequency | 533.33 MHz (IF sampling) |
| Quantization | 8 bits |
| Data Compression | Block Adaptive Quantization (BAQ) 3 bits, BAQ 4 bits, High-4 bits, 8 bit (Selectable) |
| Output Data Rate | 1280 Mbps max |
| Parameter | Properties | Comments |
|---|---|---|
| Polarization isolation | ≥35 dB | |
| Polarization amplitude unbalance | ≤0.26 dB, | Fixed bias compensated |
| Polarization phase unbalance | ≤4.15° | Fixed bias compensated |
| Noise Equivalent Sigma Zero (NESZ) | ≤−19.5 dB | P, UF, F, WF, Q, WV modes |
| ≤−21.3 dB | S, NS, WS, G, WQ, E modes | |
| Azimuth ambiguity | ≤−20.1 dB | P, UF, F, WF, Q, WV modes |
| ≤−18.8 dB | S, NS, WS, G, WQ, E modes | |
| Range ambiguity | ≤−20.0 dB | |
| Peak Side Lobe Ratio (PSLR) | ≤−22.8 dB | P, UF, F, WF, Q, WV modes |
| ≤−20.5 dB | S, NS, WS, G, WQ, E modes | |
| Integrated Side Lobe Ratio (ISLR) | ≤−16.7 dB | P, UF, F, WF, Q, WV modes |
| ≤−15.3 dB | S, NS, WS, G, WQ, E modes | |
| Radiometric resolution | ≤3.50 dB | P, UF, F, WF, Q, WV modes |
| ≤1.89 dB | S, NS, WS, G, WQ, E modes | |
| Absolute radiometric error | ≤1.5 dB | |
| Relative radiometric error | ≤1.0 dB |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Yu, W.; Deng, Y. The SAR Payload Design and Performance for the GF-3 Mission. Sensors 2017, 17, 2419. https://doi.org/10.3390/s17102419
Sun J, Yu W, Deng Y. The SAR Payload Design and Performance for the GF-3 Mission. Sensors. 2017; 17(10):2419. https://doi.org/10.3390/s17102419
Chicago/Turabian StyleSun, Jili, Weidong Yu, and Yunkai Deng. 2017. "The SAR Payload Design and Performance for the GF-3 Mission" Sensors 17, no. 10: 2419. https://doi.org/10.3390/s17102419
APA StyleSun, J., Yu, W., & Deng, Y. (2017). The SAR Payload Design and Performance for the GF-3 Mission. Sensors, 17(10), 2419. https://doi.org/10.3390/s17102419