BeiDou Geostationary Satellite Code Bias Modeling Using Fengyun-3C Onboard Measurements



Abstract
:1. Introduction
2. Fengyun-3C Onboard Data Quality Analysis
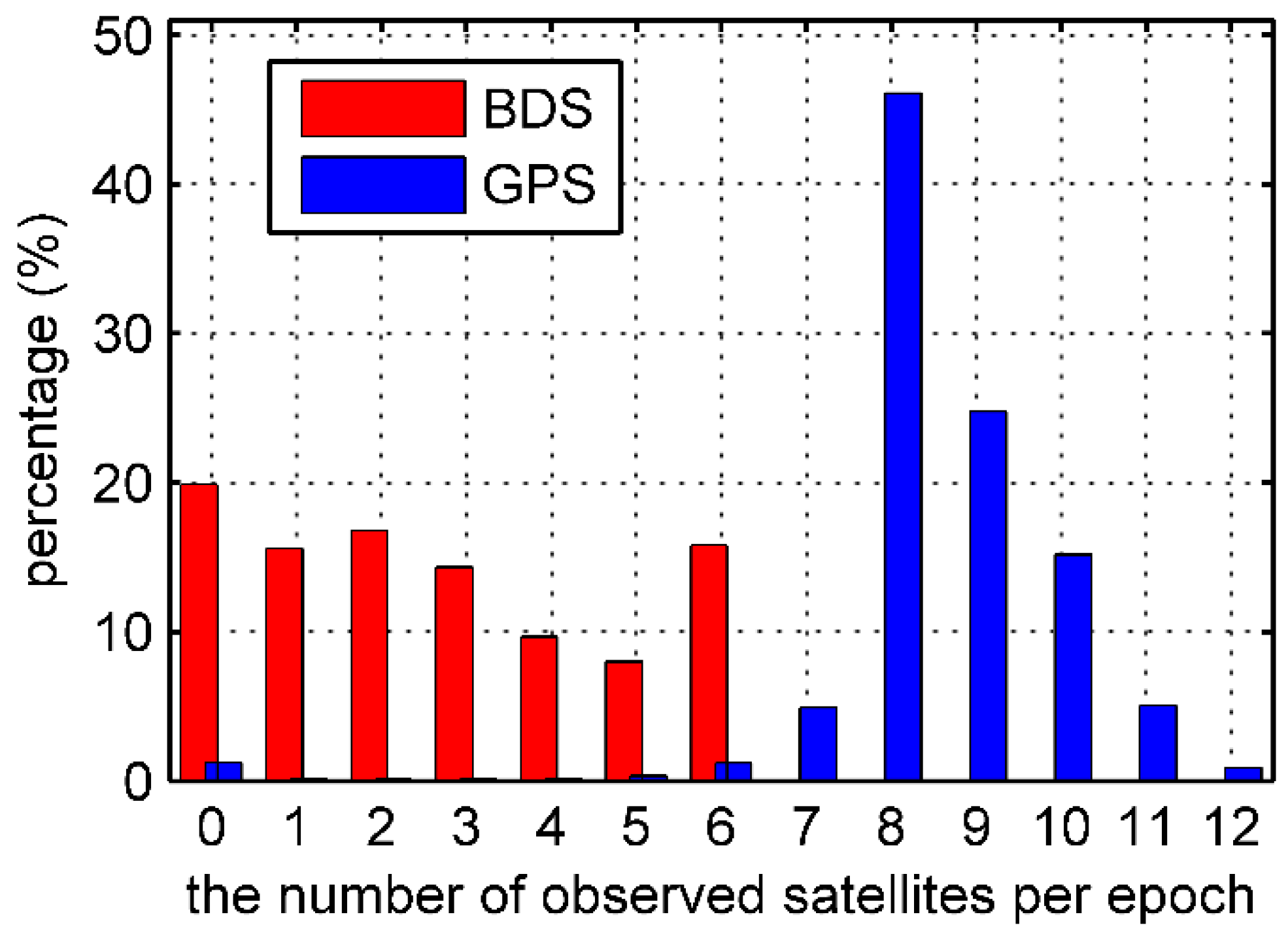
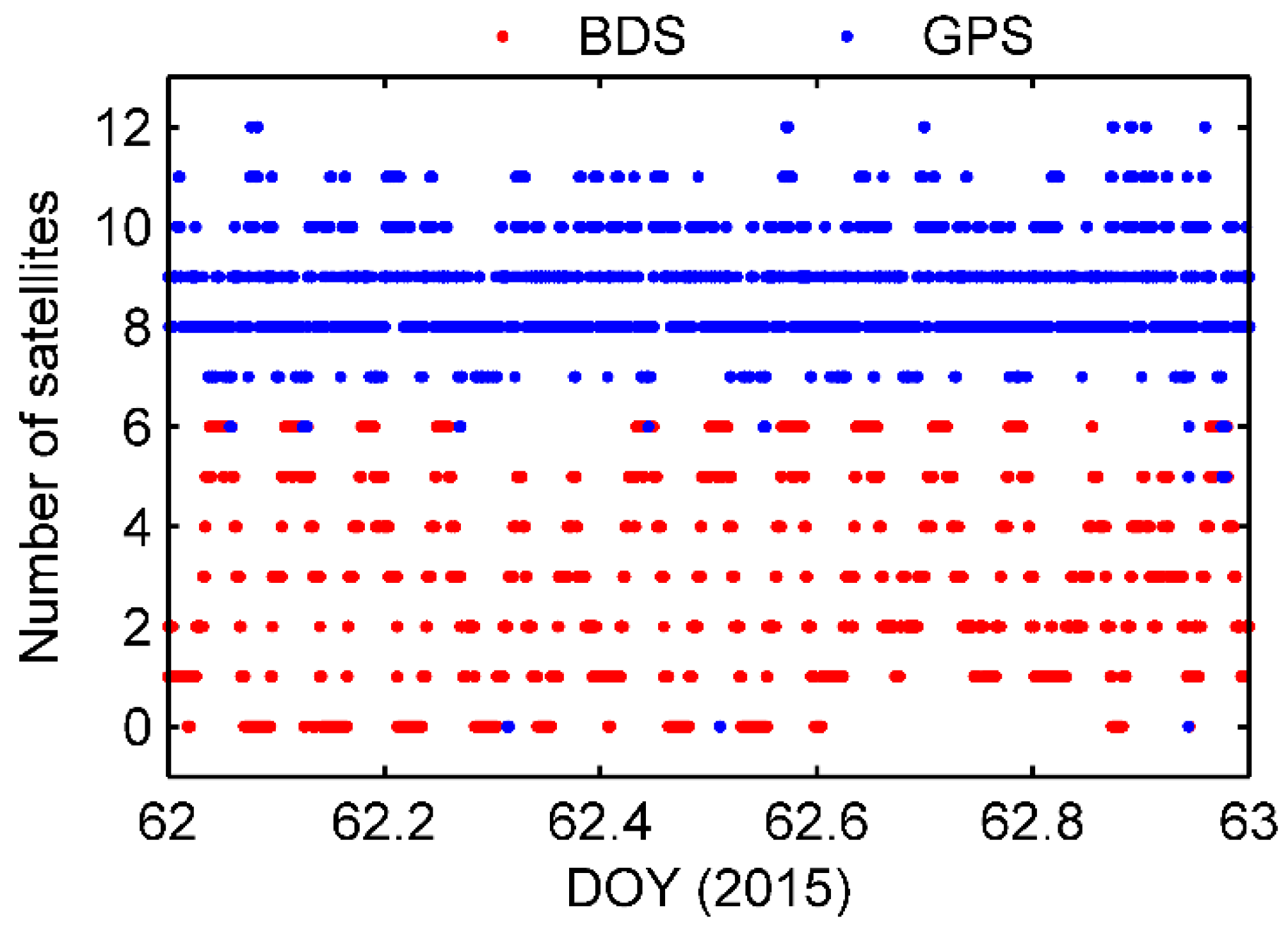
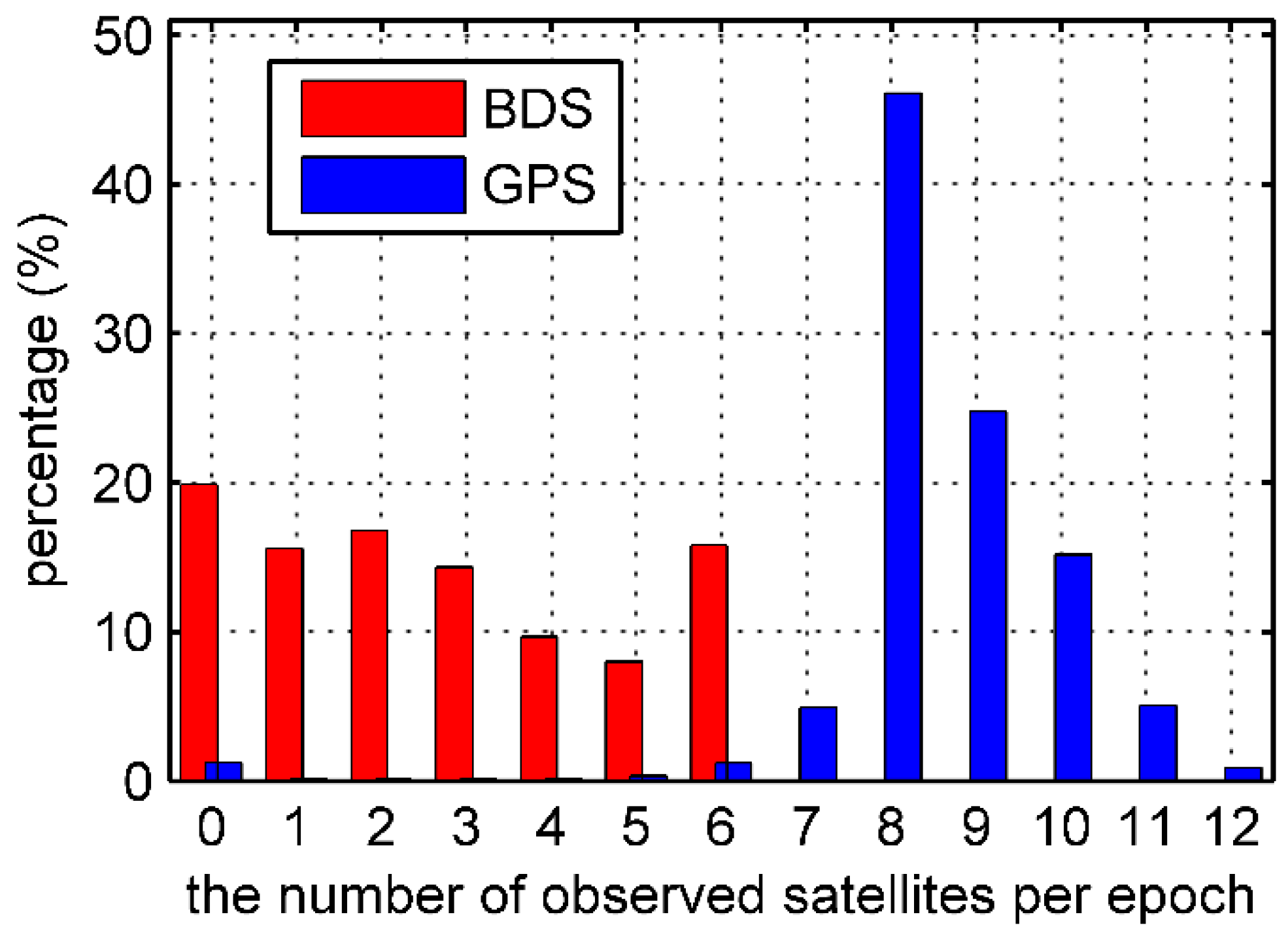
2.1. Measurement Availability
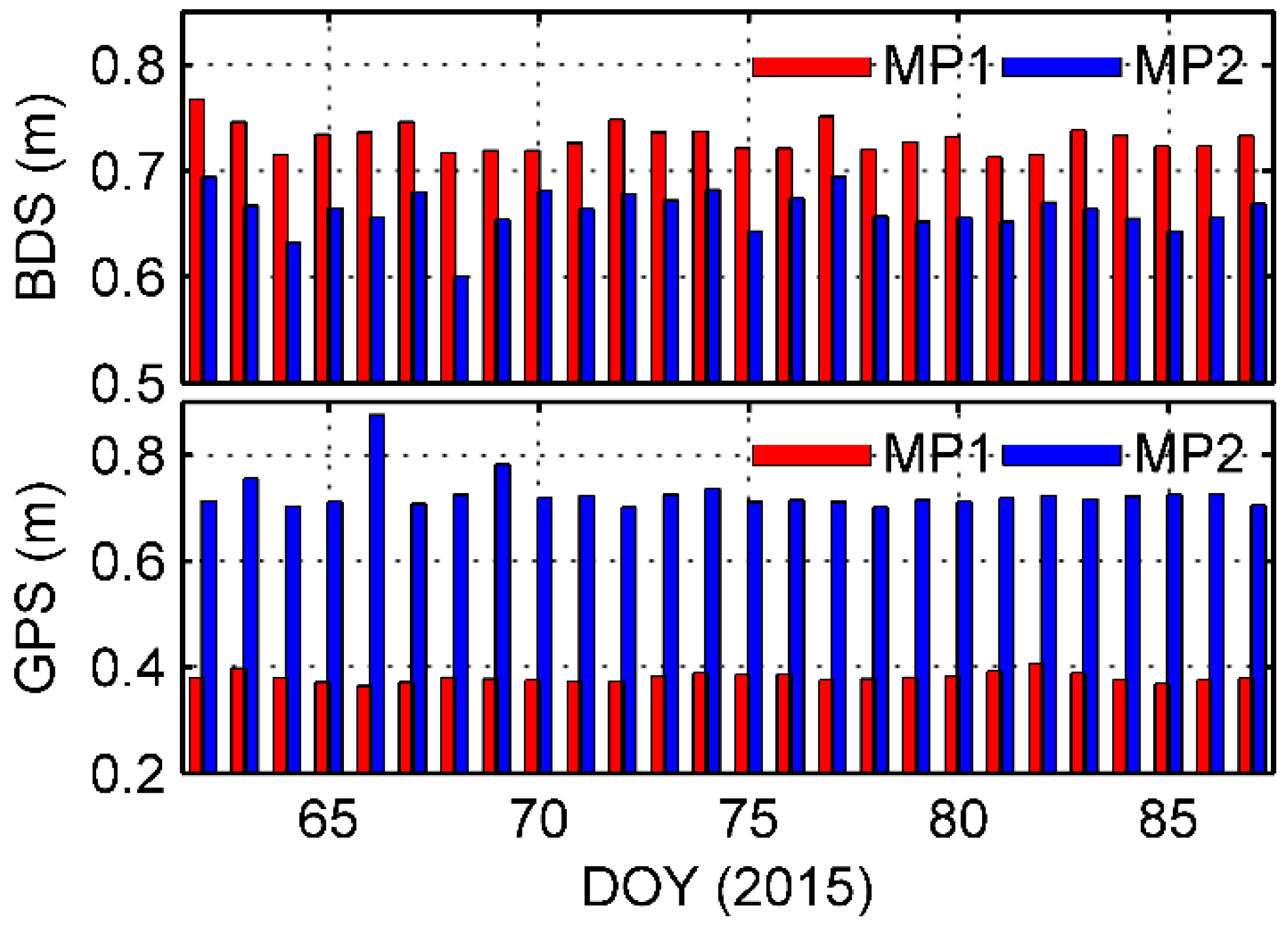
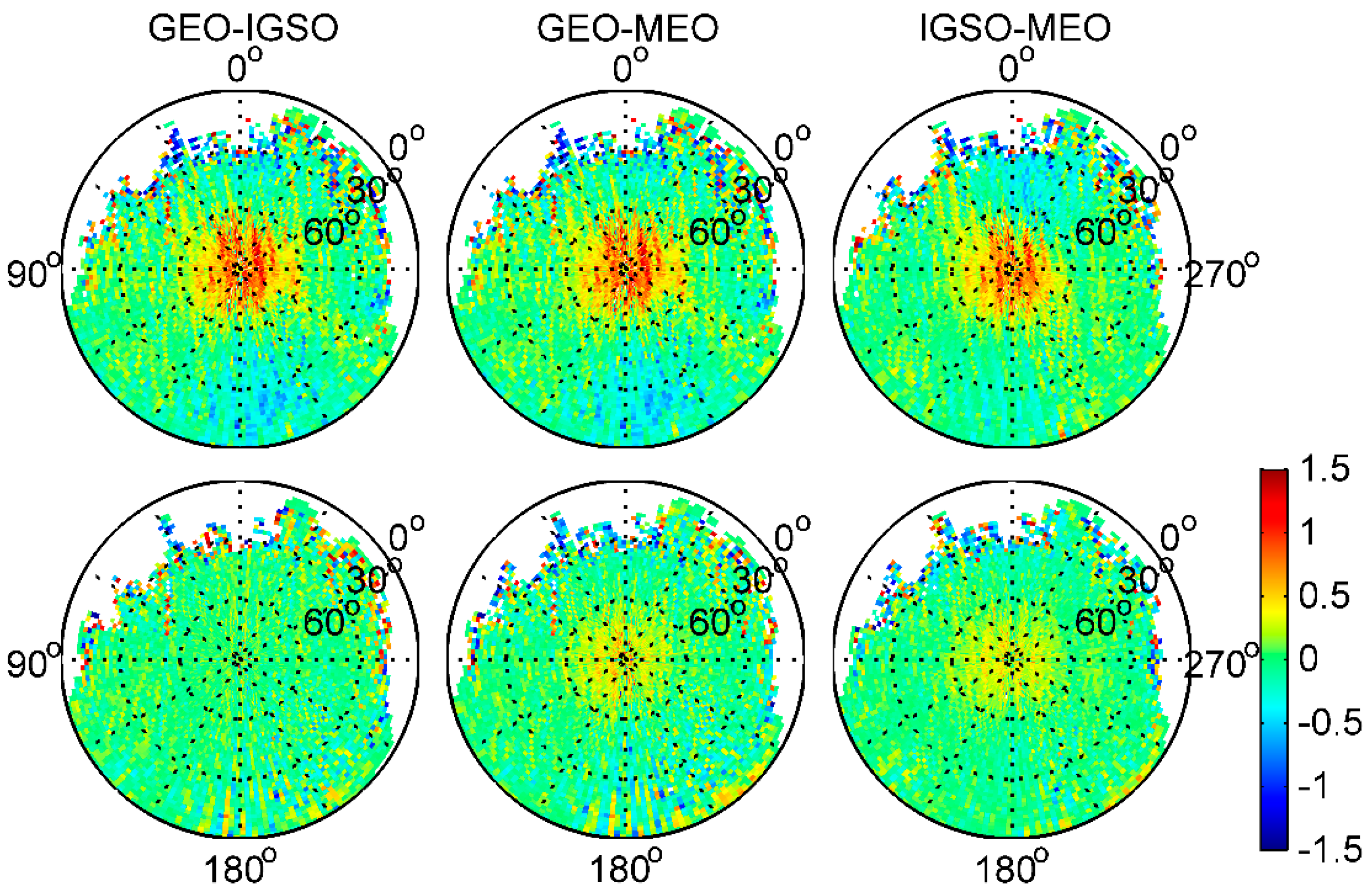
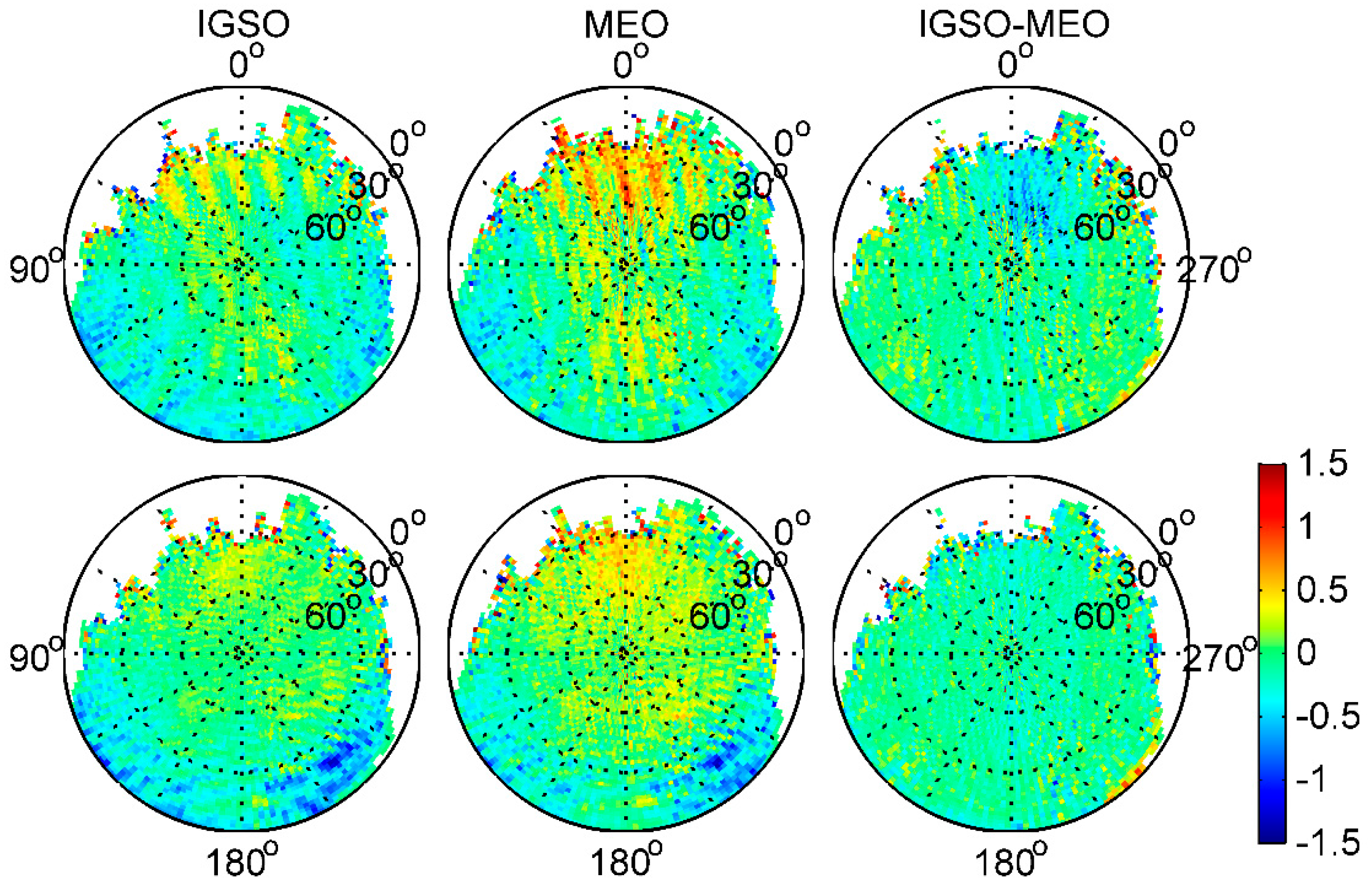
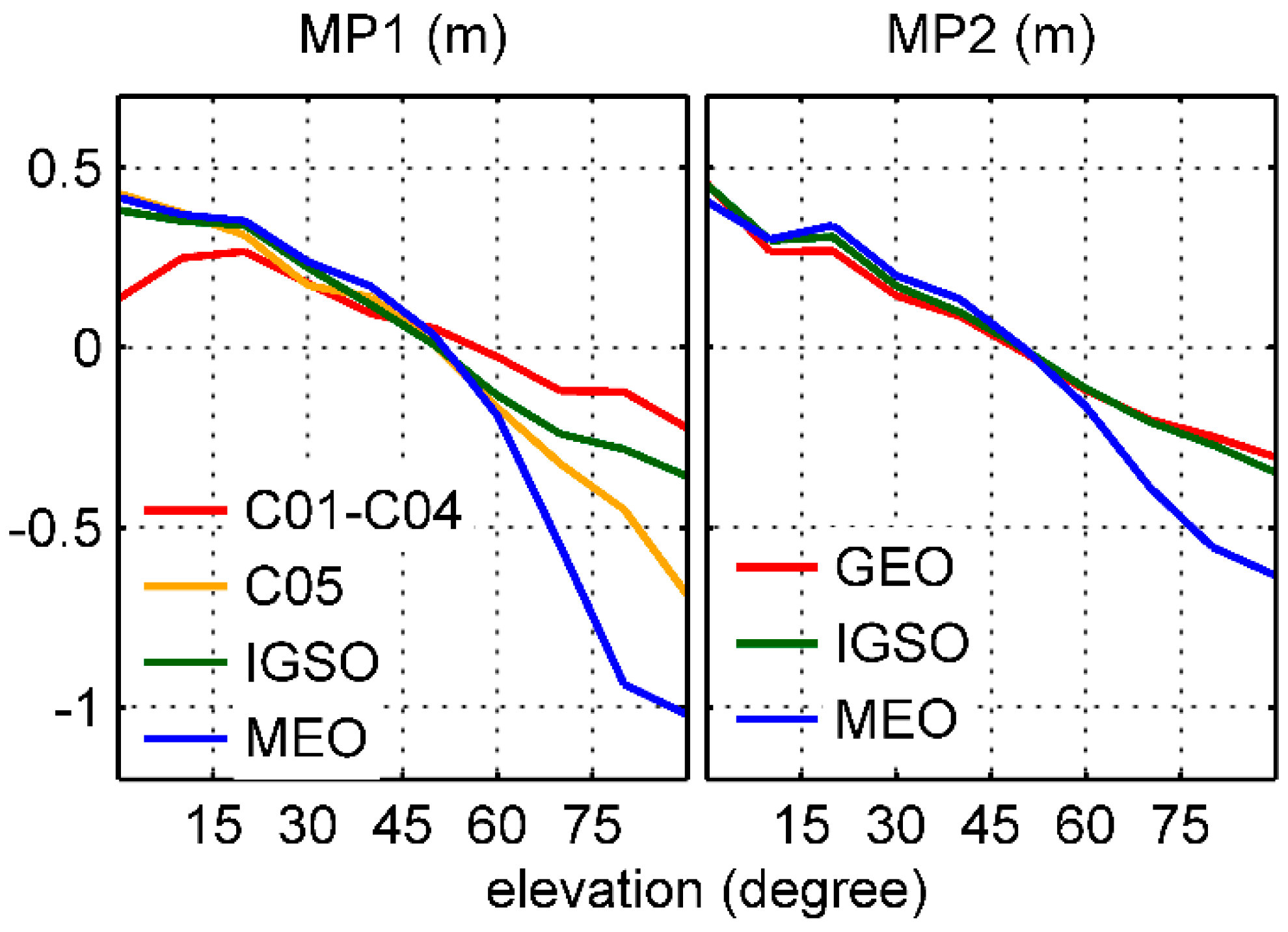
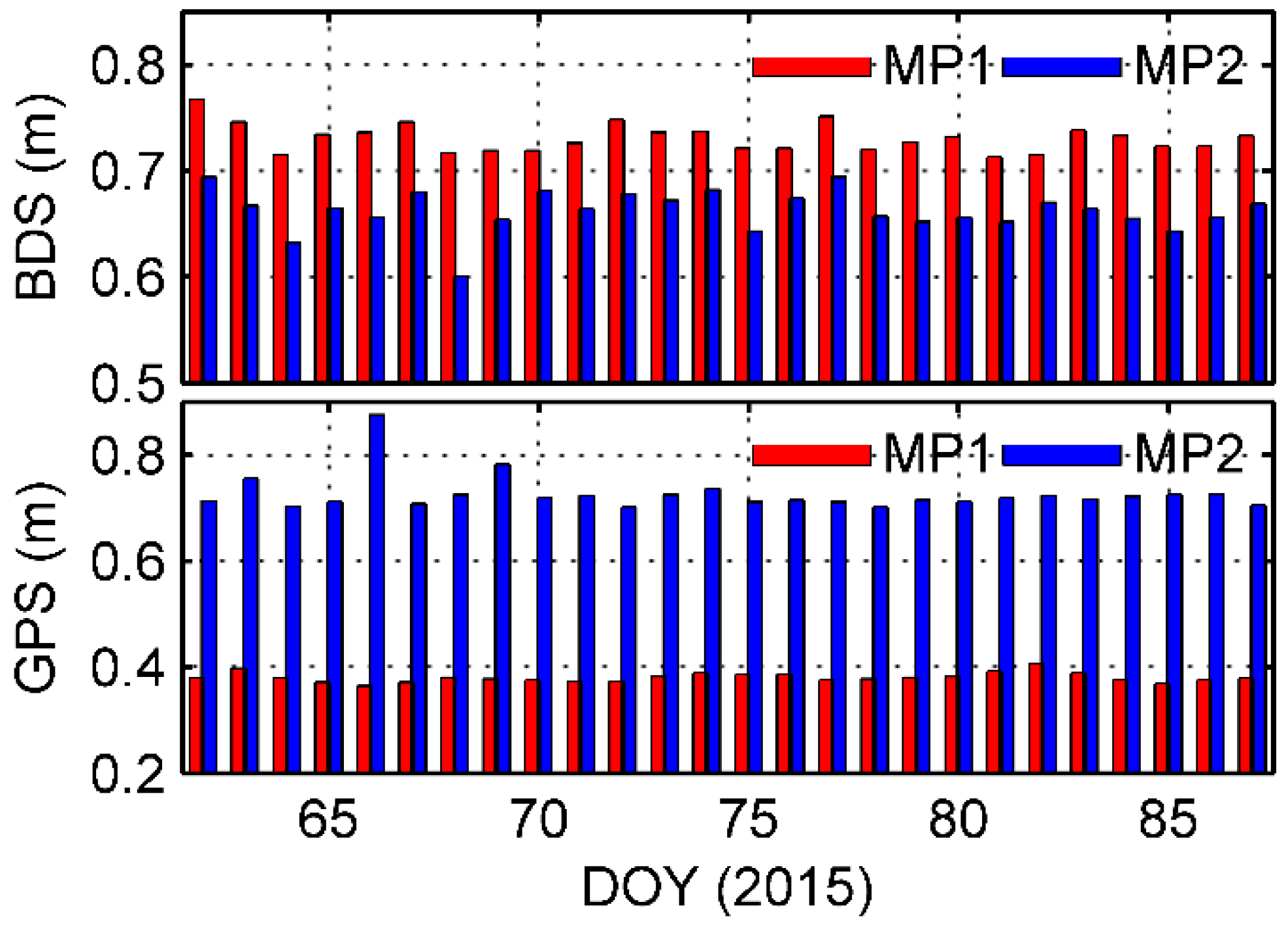
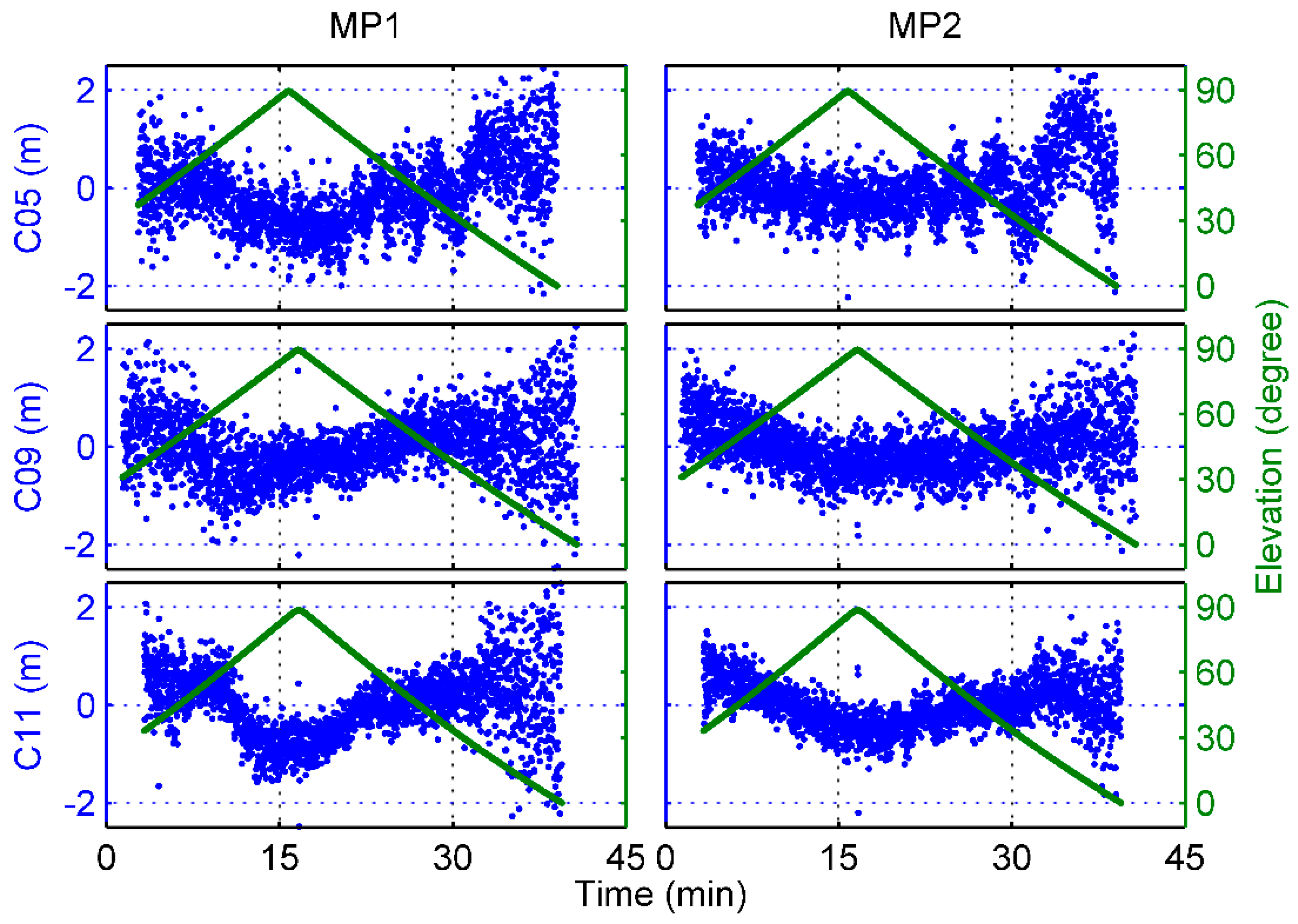
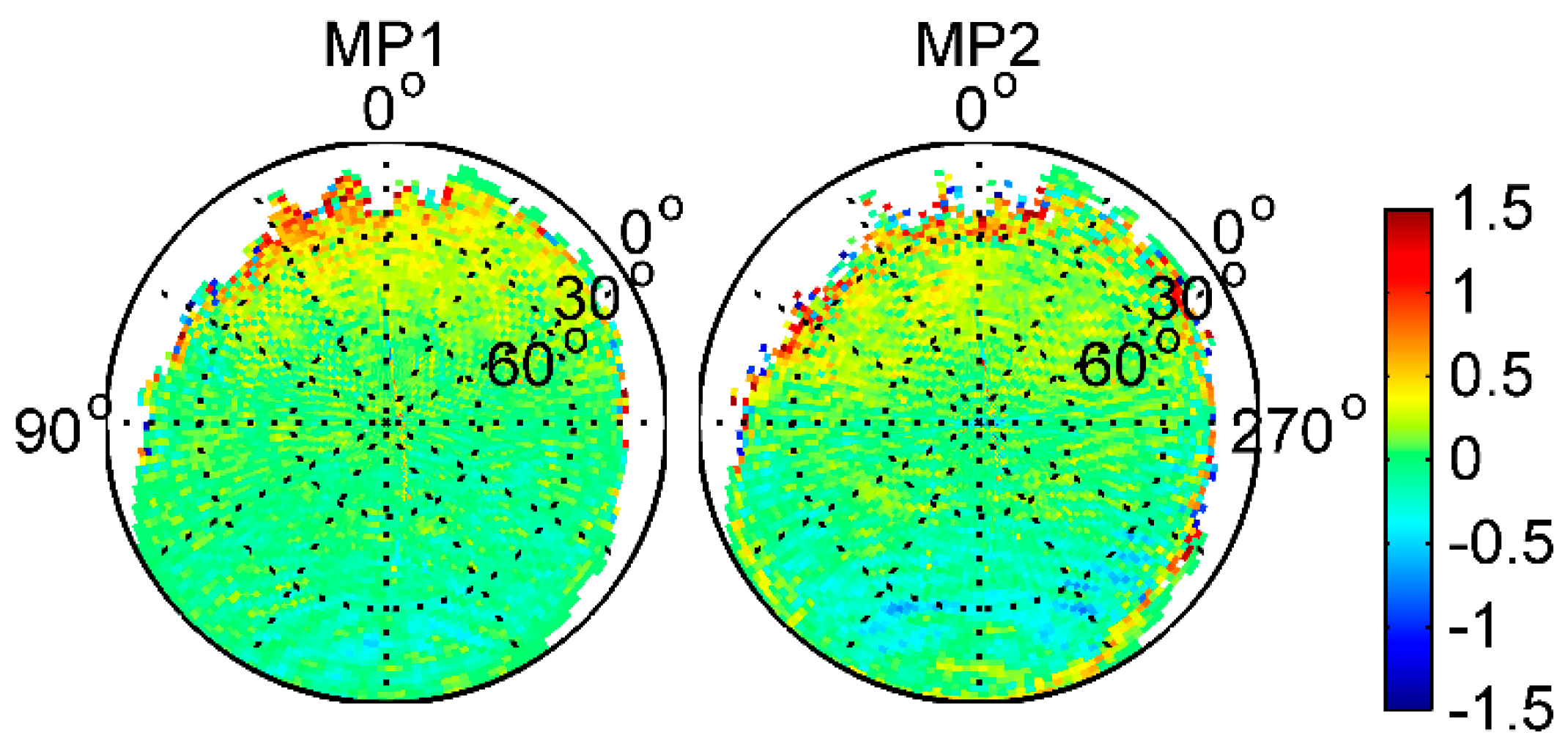
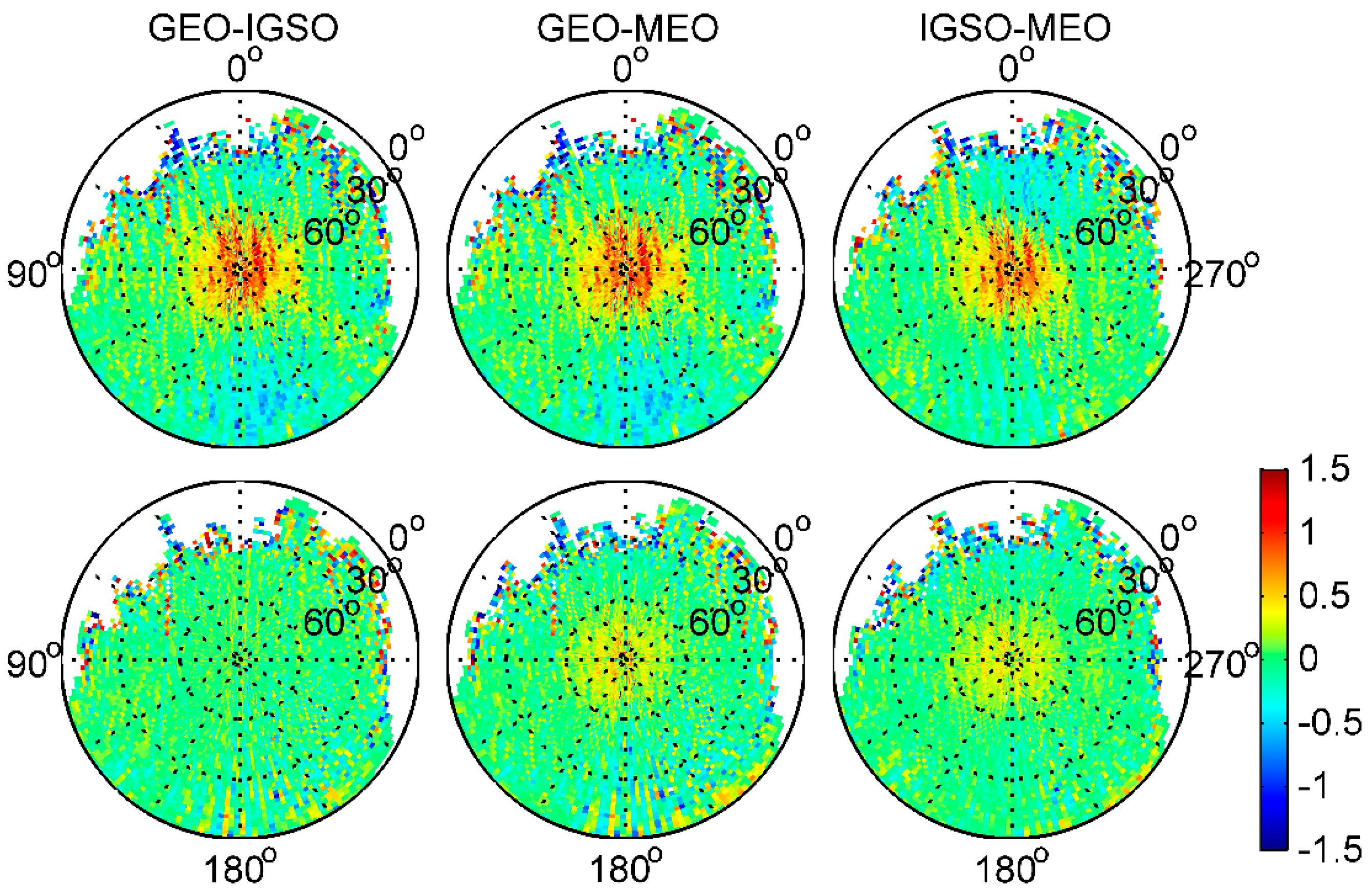
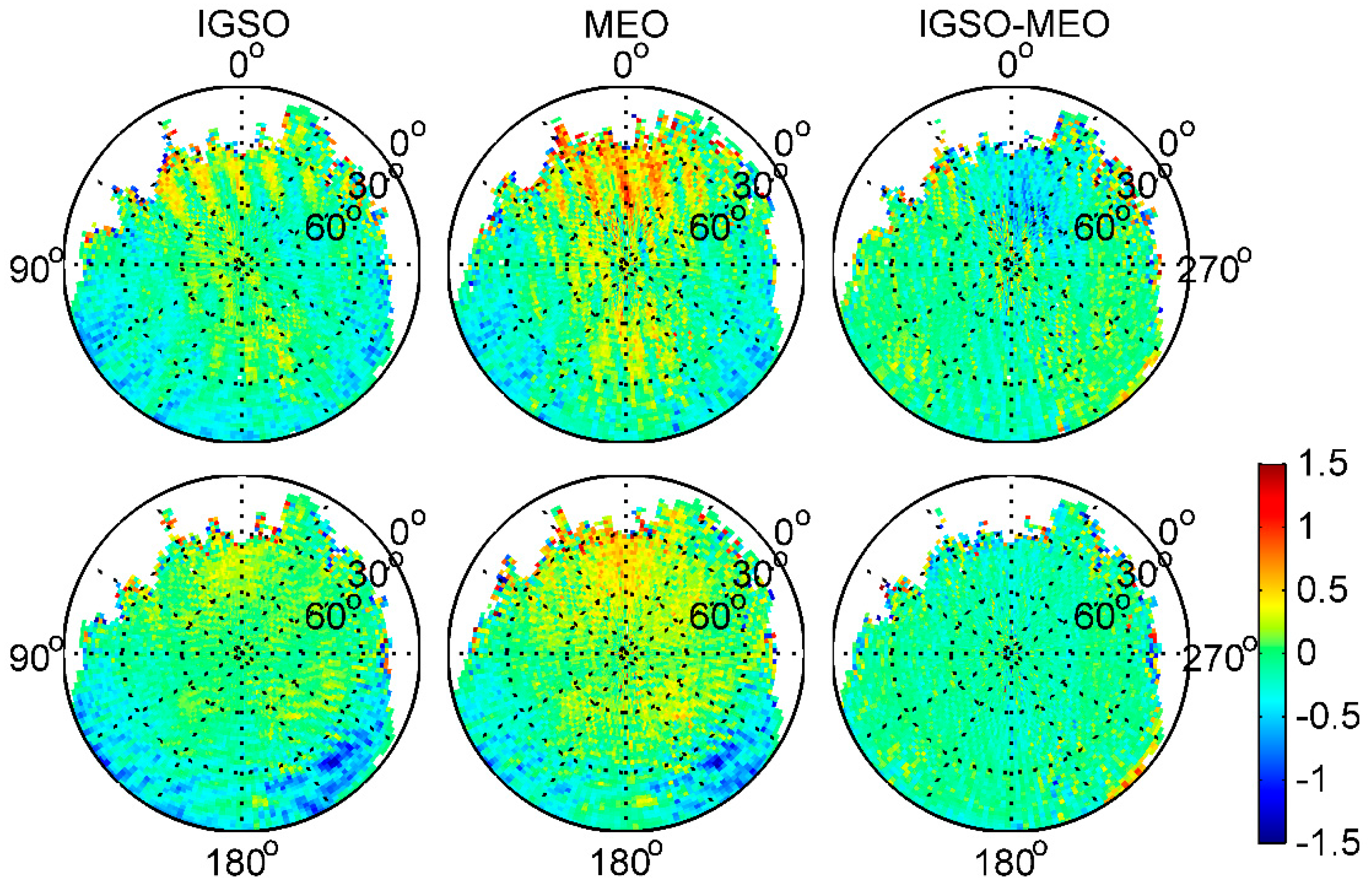
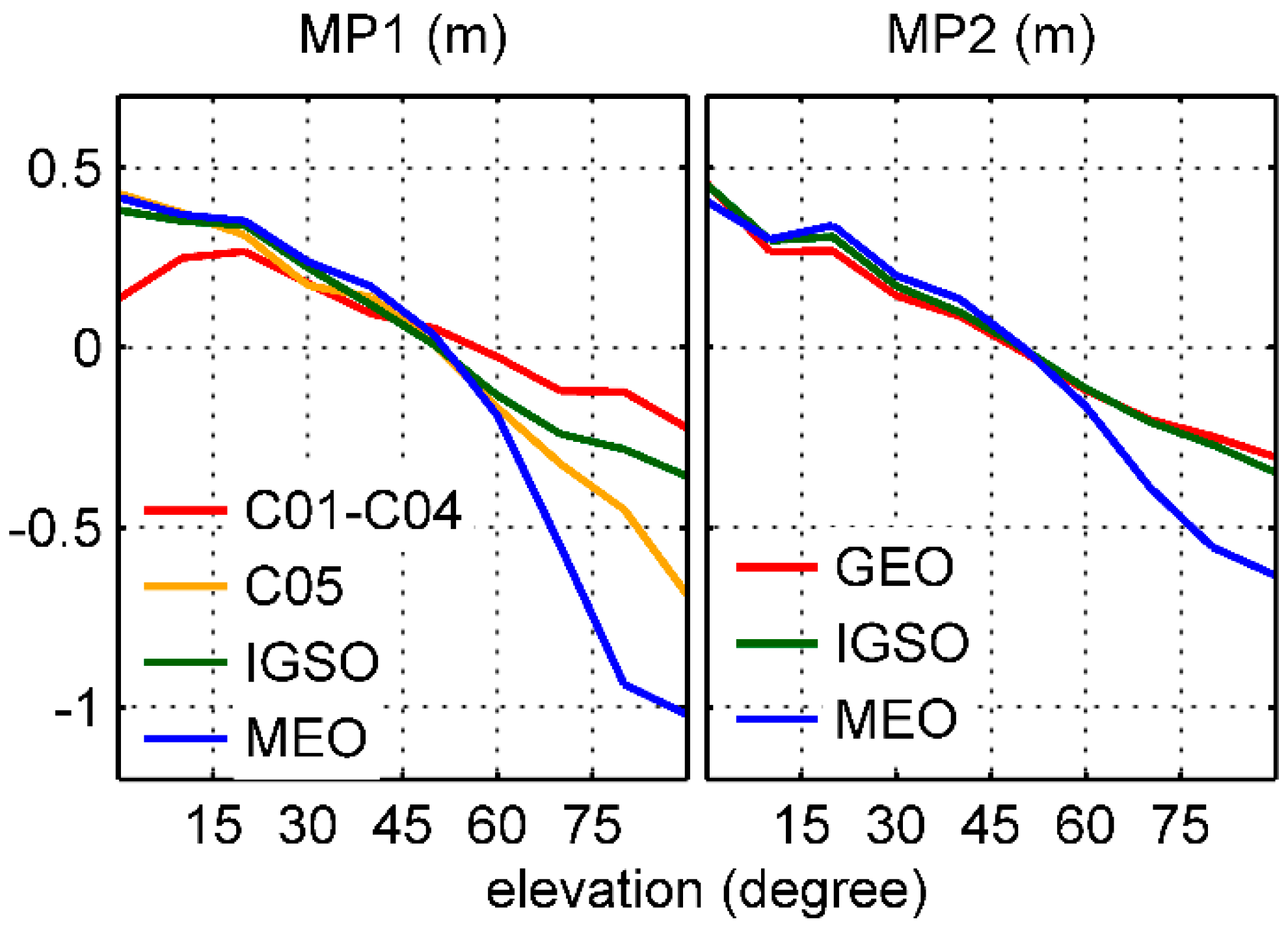
2.2. BDS Code Multipath
3. Results
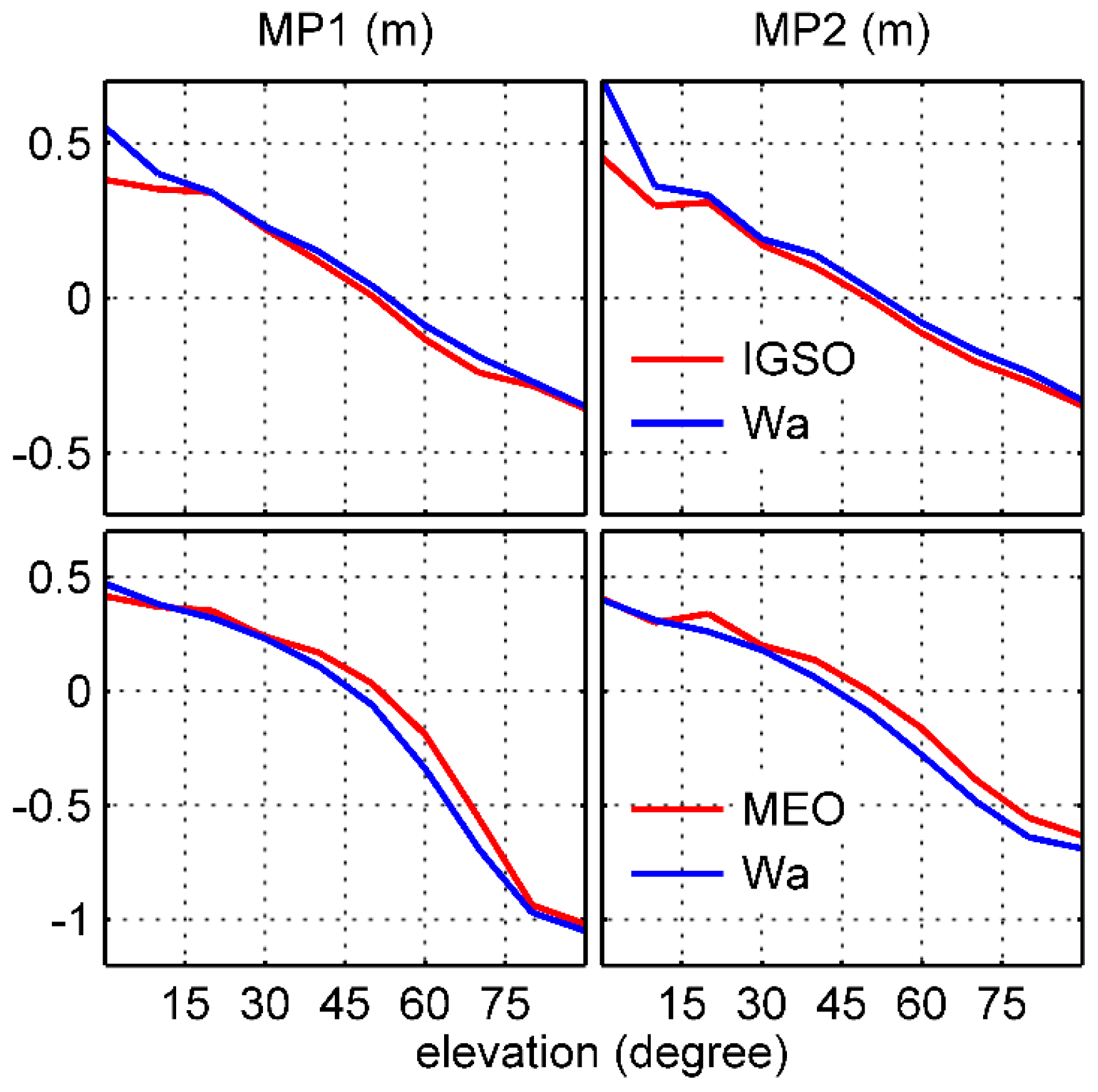
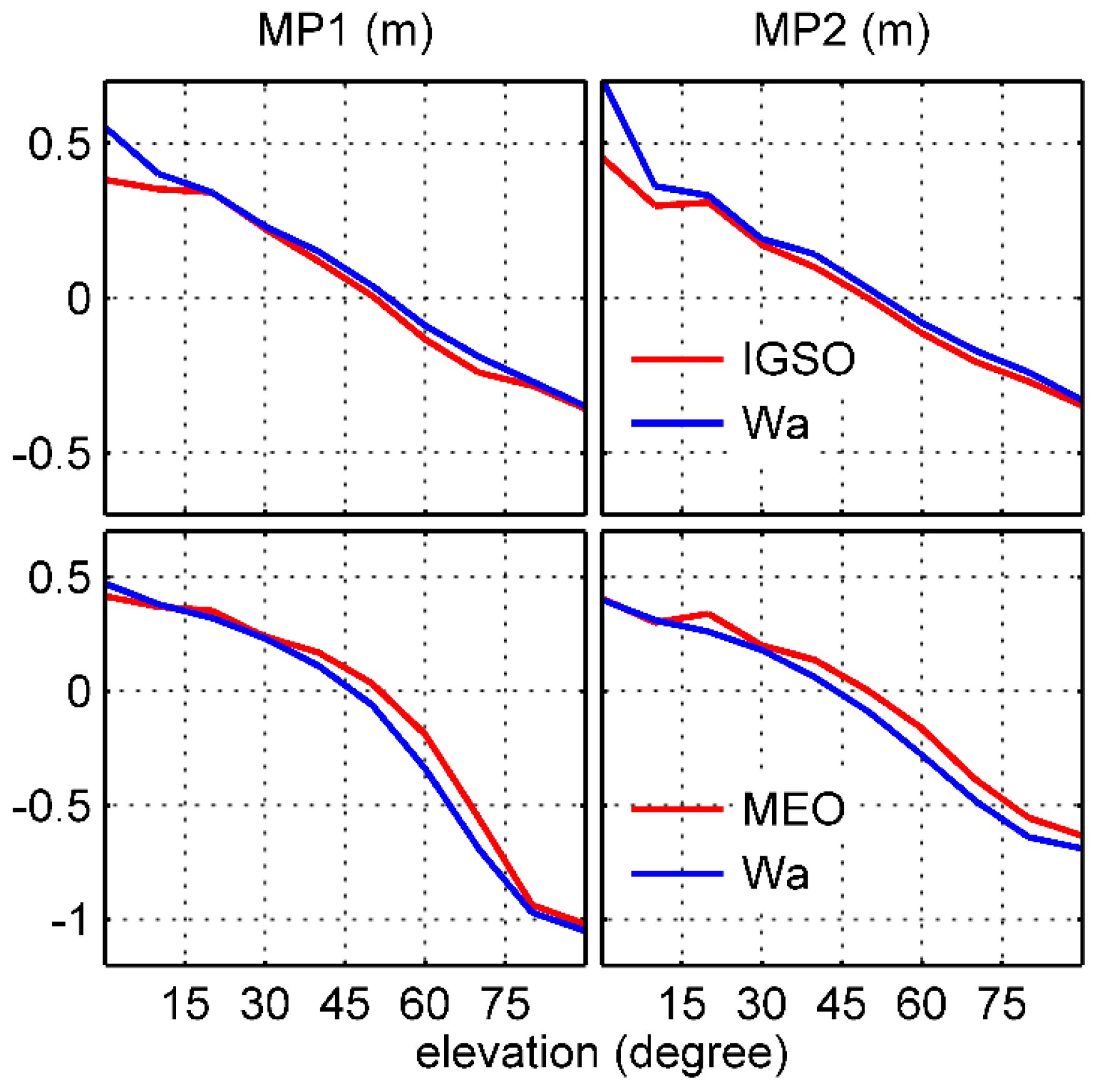
3.1. Inconsistency of Linear Models
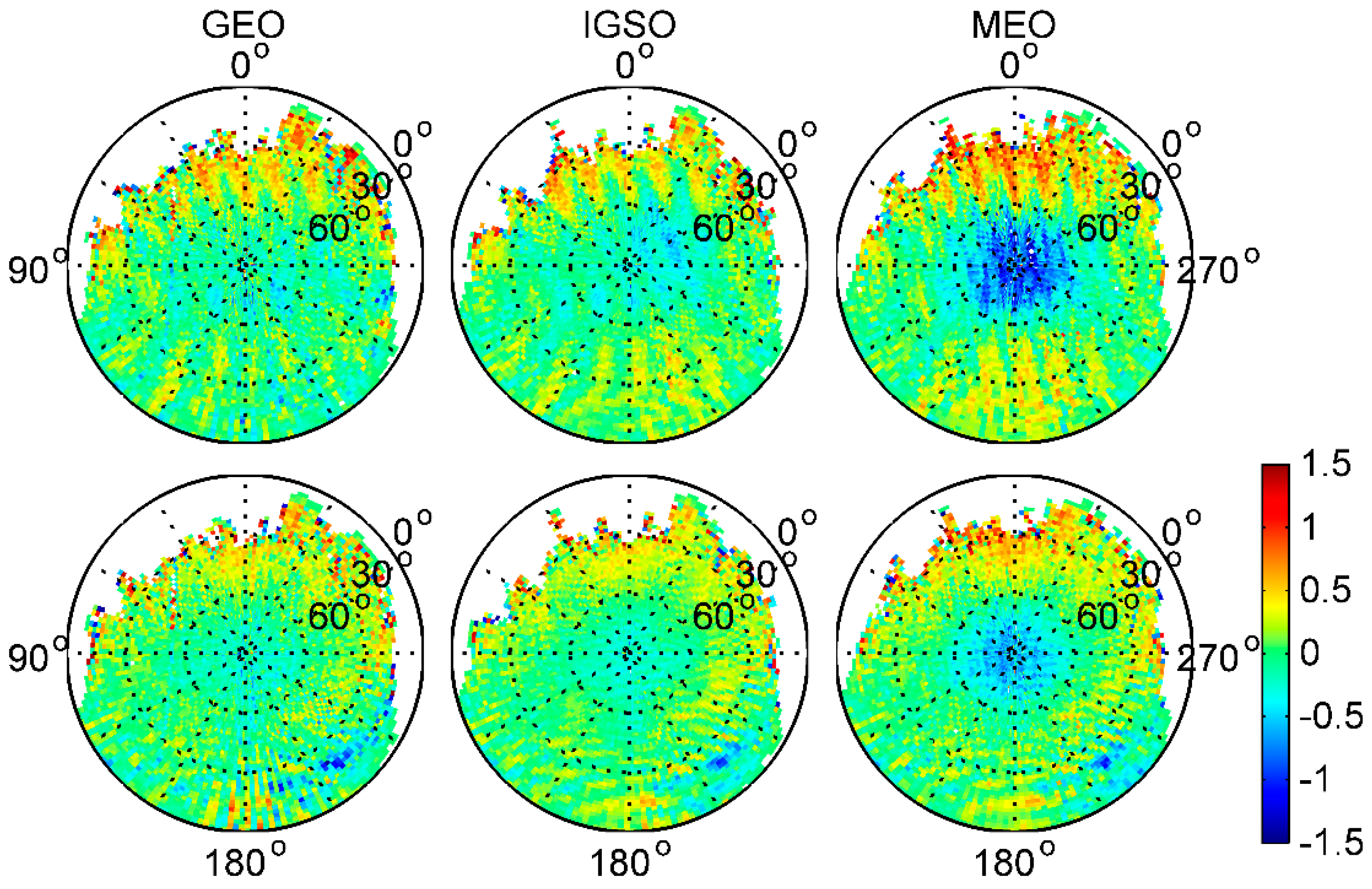
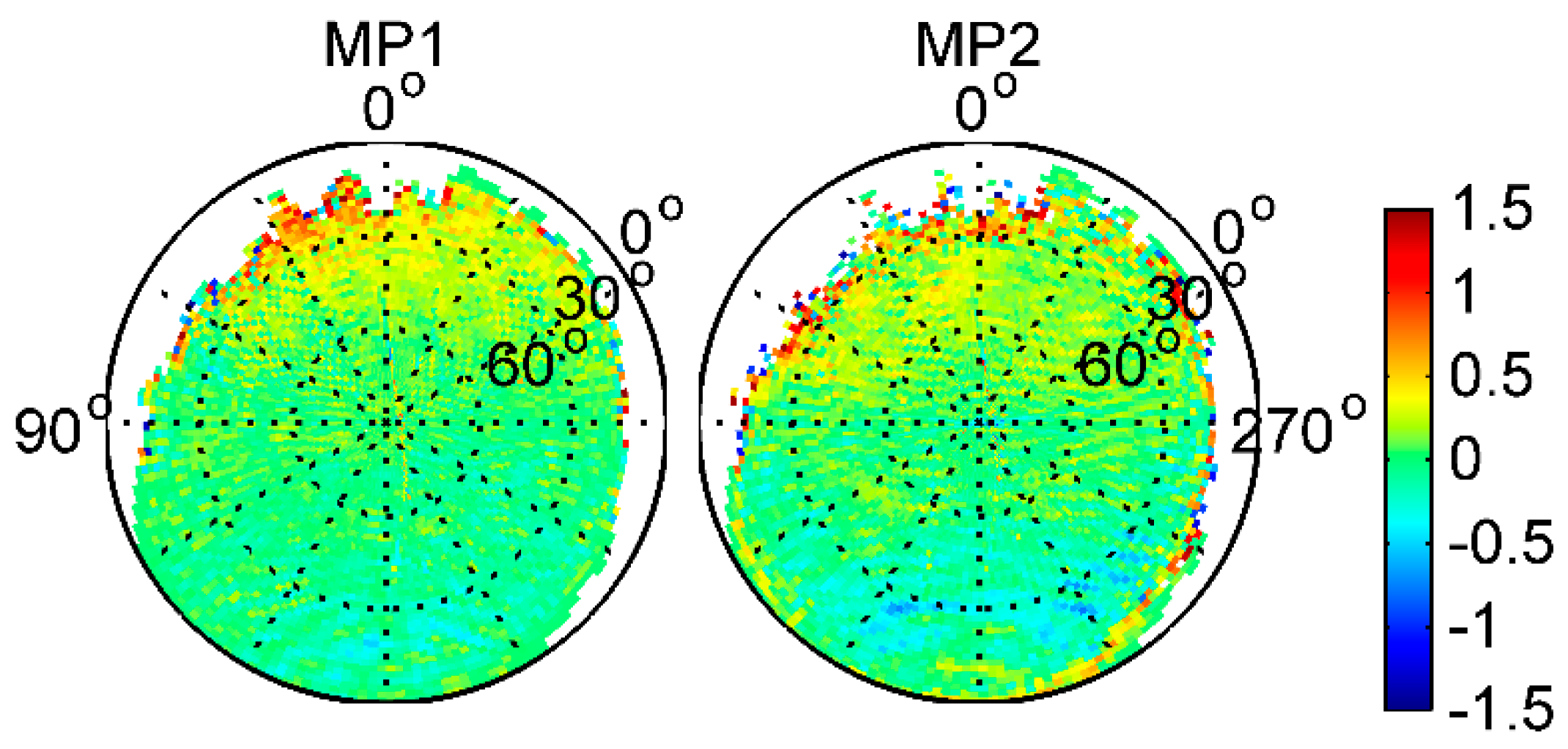
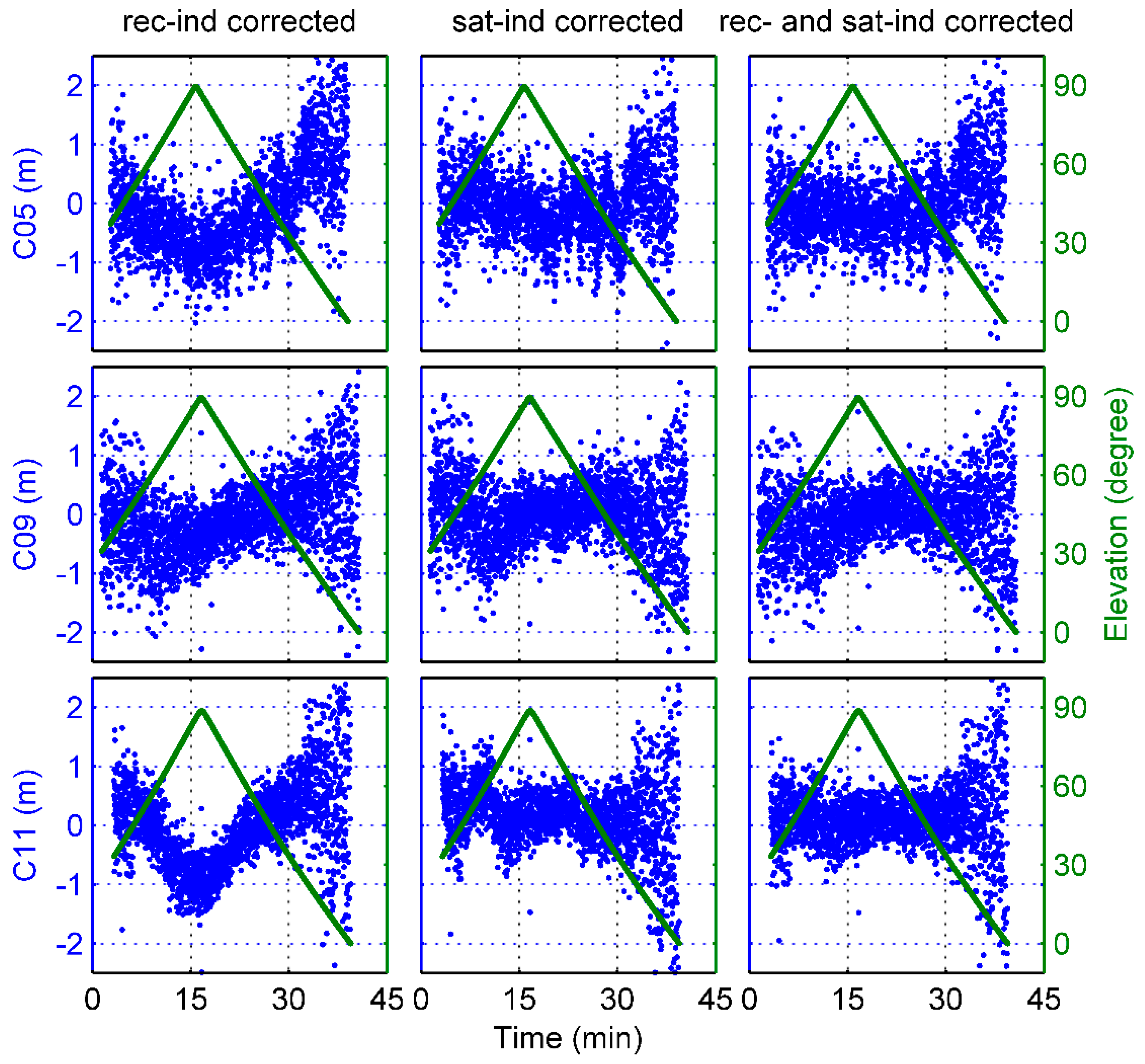
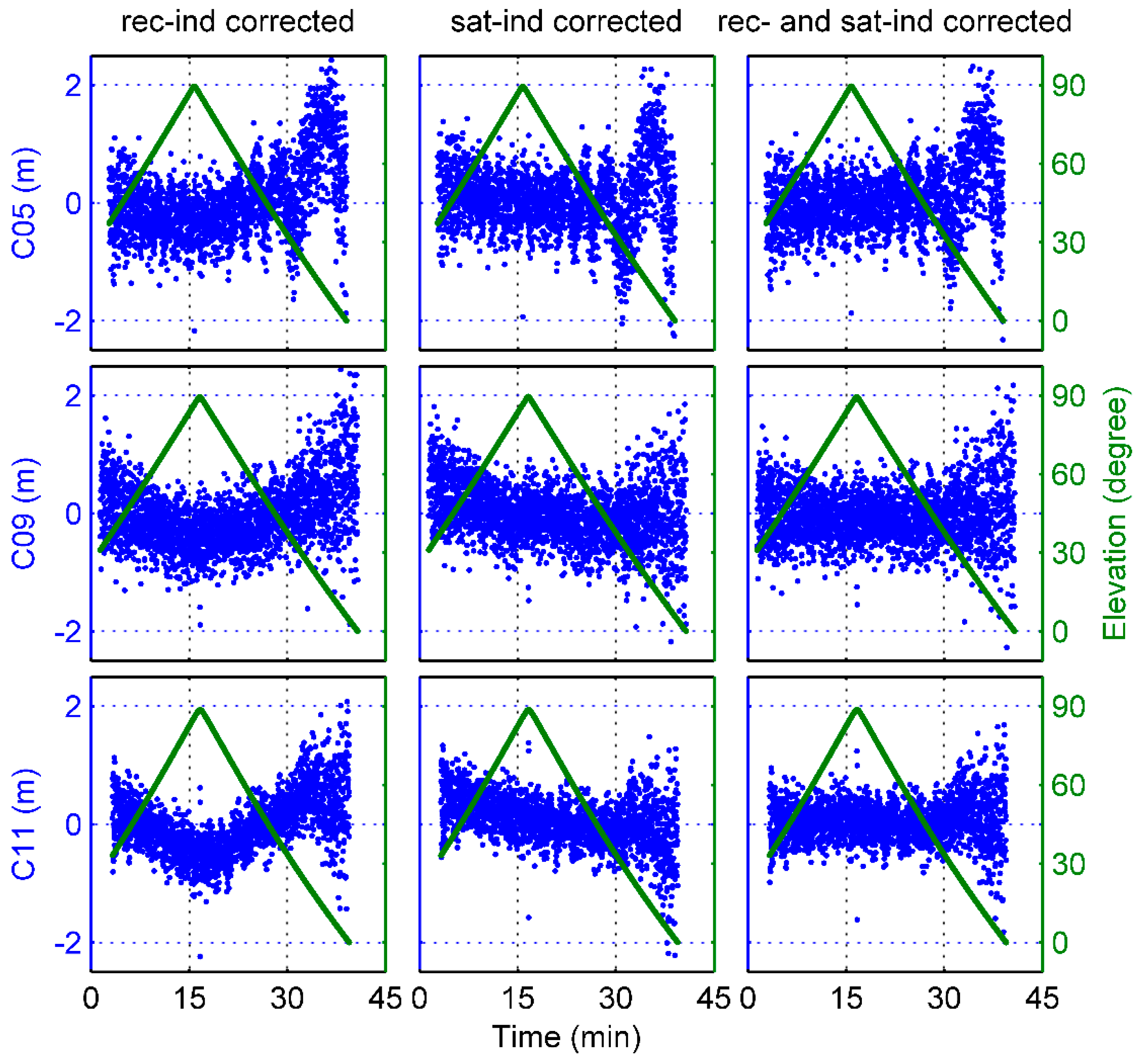
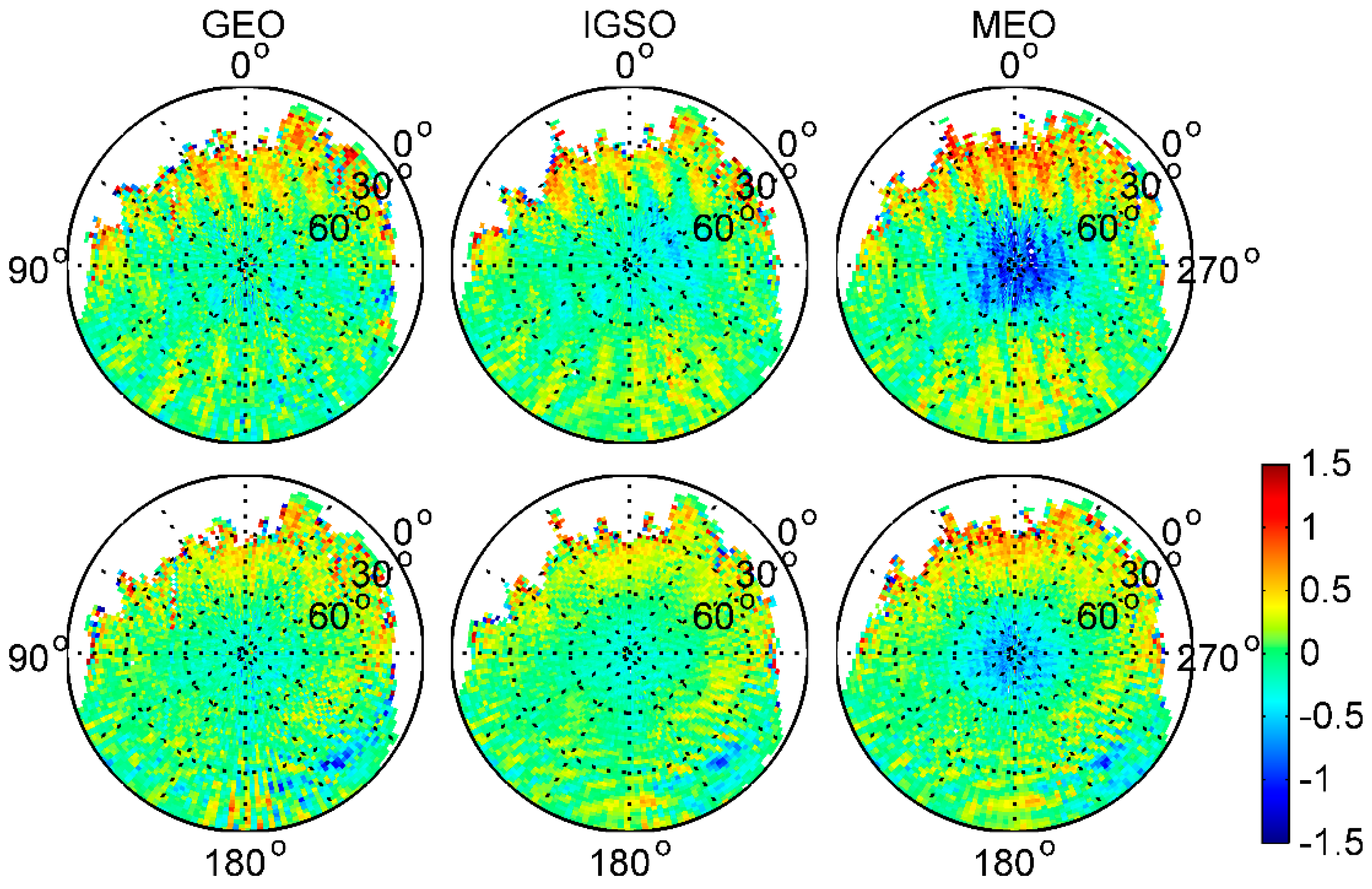
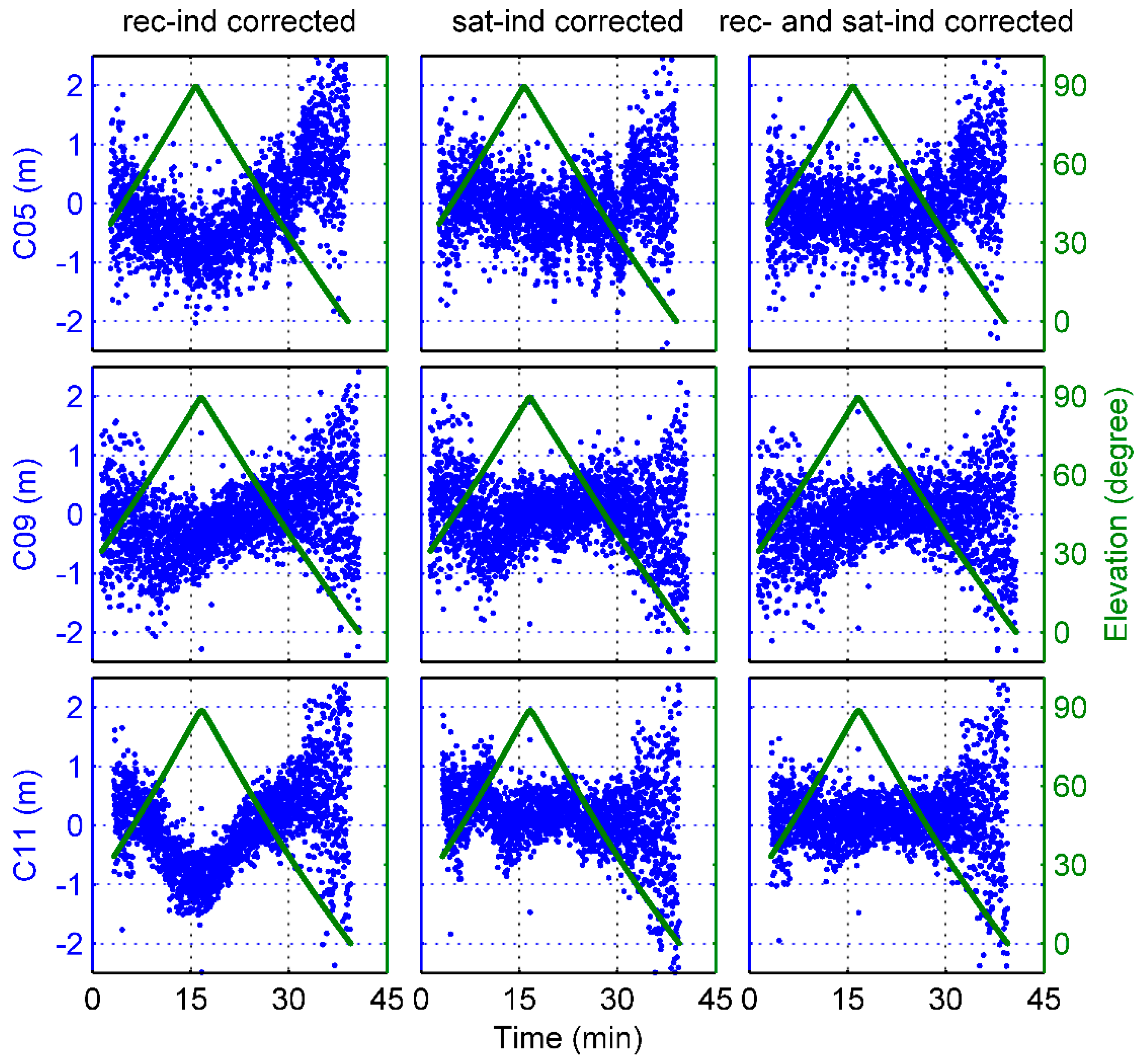
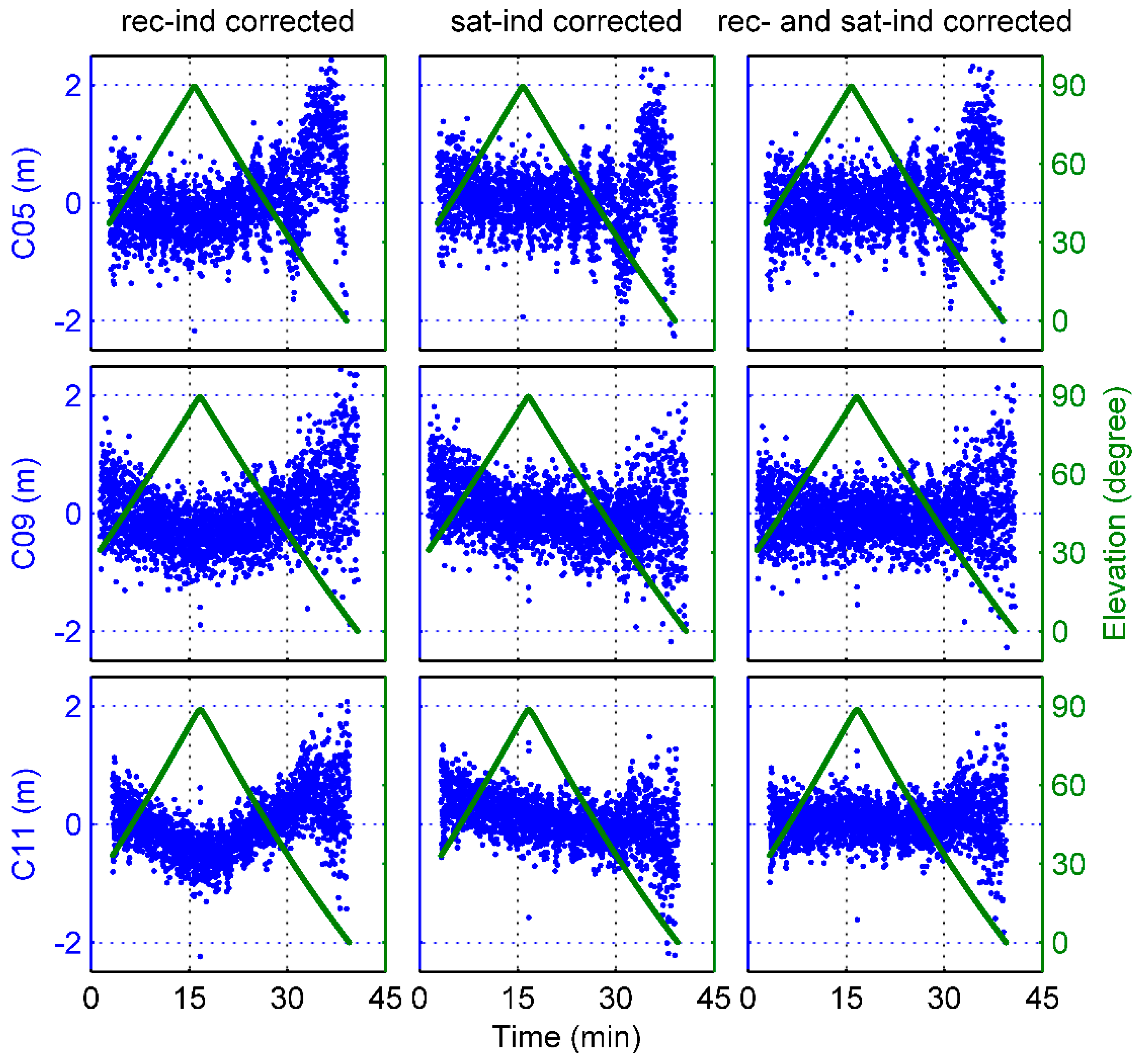
3.2. Satellite- and Receiver-Induced Code Biases and Modeling
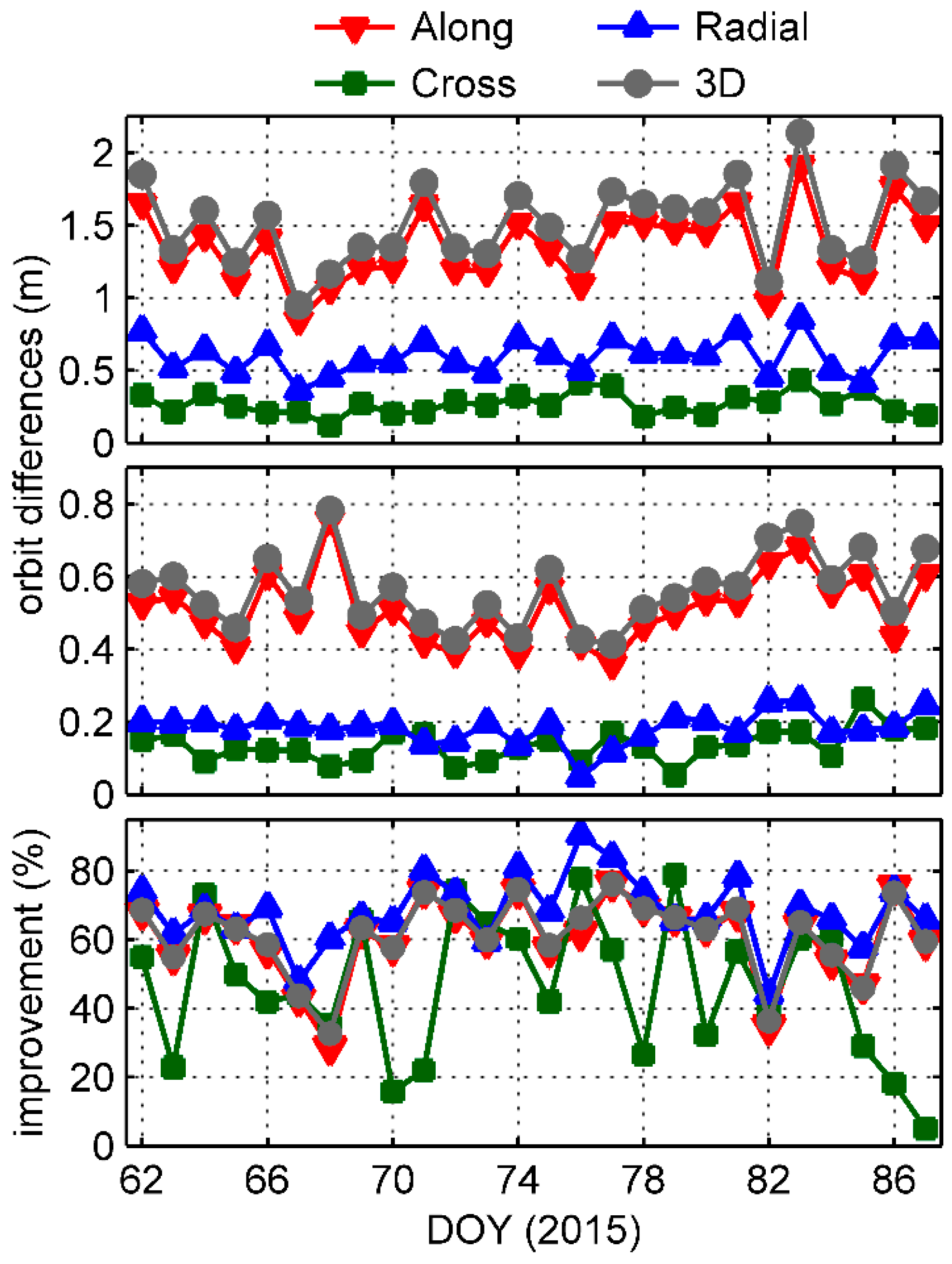
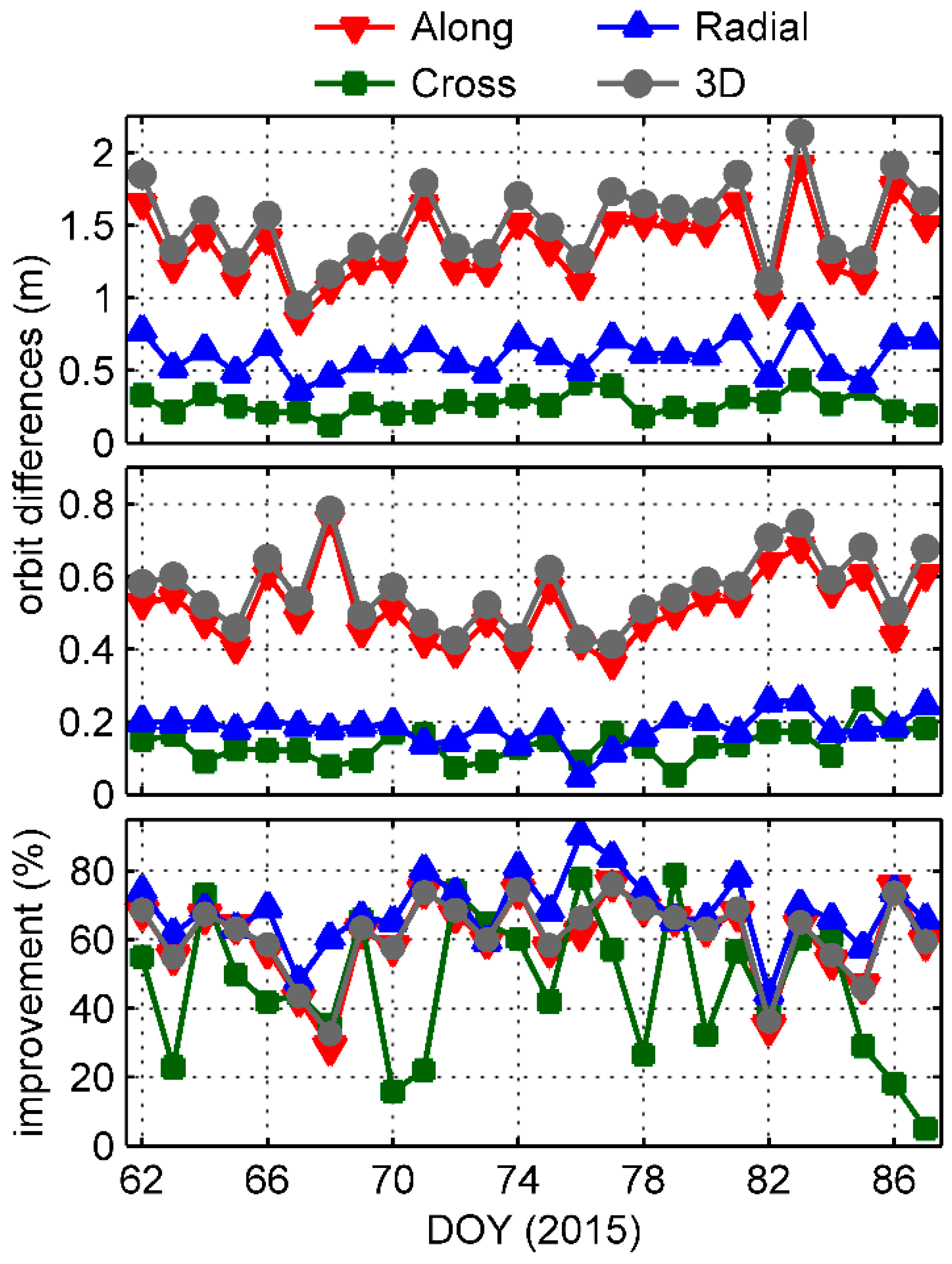
3.3. The Effect on Single-Frequency BDS Orbit Determination of Fengyun-3C
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- China Satellite Navigation Office (CSNO). BeiDou Navigation Satellite System Signal in Space Interface Control Document, Open Service Signal (Version 2.1). Available online: http://www.beidou.gov.cn/attach/2016/11/07/21212.pdf (accessed on 10 December 2016).
- Zhao, Q.; Wang, G.; Liu, Z.; Hu, Z.; Dai, Z.; Liu, J. Analysis of BeiDou satellite measurements with code multipath and geometry-free ionosphere-free combinations. Sensors 2016, 16, 123. [Google Scholar] [CrossRef] [PubMed]
- Bai, W.; Sun, Y.; Du, Q.; Yang, G.; Yang, Z.; Zhang, P.; Bi, Y.; Wang, X.; Cheng, C.; Han, Y. An introduction to the FY3 GNOS instrument and mountain-top tests. Atmos. Meas. Tech. 2014, 7, 1817–1823. [Google Scholar] [CrossRef]
- Bi, Y.; Yang, Z.; Zhang, P.; Sun, Y.; Bai, W.; Du, Q.; Yang, G.; Chen, J.; Liao, M. An introduction to China FY3 radio occultation mission and its measurement simulation. Adv. Space Res. 2012, 49, 1191–1197. [Google Scholar] [CrossRef]
- Zhao, Q.; Wang, C.; Guo, J.; Yang, G.; Liao, M.; Ma, H.; Liu, J. Enhanced orbit determination for beidou satellites with fengyun-3c onboard gnss data. GPS Solut. 2017, 21, 1–12. [Google Scholar] [CrossRef]
- Hauschild, A.; Montenbruck, O.; Sleewaegen, J.; Huisman, L.; Teunissen, P. Characterization of compass m-1 signals. GPS Solut. 2012, 16, 117–126. [Google Scholar] [CrossRef]
- Montenbruck, O.; Rizos, C.; Weber, R.; Weber, G.; Neilan, R.; Hugentobler, U. Getting a grip on multi-gnss: The international gnss service mgex campaign. GPS World 2013, 24, 44–49. [Google Scholar]
- Wanninger, L.; Beer, S. BeiDou satellite-induced code pseudorange variations: Diagnosis and therapy. GPS Solut. 2014, 19, 639–648. [Google Scholar] [CrossRef]
- Lou, Y.; Gong, X.; Gu, S.; Zheng, F.; Feng, Y. Assessment of code bias variations of BDS triple-frequency signals and their impacts on ambiguity resolution for long baselines. GPS Solut. 2016, 21, 177–186. [Google Scholar] [CrossRef]
- Leick, A. GPS Satellite Surveying, 3rd ed.; John Wiley: Hoboken, NJ, USA, 2004; pp. 170–177. [Google Scholar]
- Rocken, C.; Meertens, C.; Stephens, B.; Braun, J.; VanHove, T.; Perry, S.; Ruud, O.; McCallum, M.; Richardson, J. UNAVCO Academic Research Infrastructure (ARI) Receiver and Antenna Test Report, UNAVCO Boulder Facility Internal Report. 1995. Available online: http://opensky.ucar.edu/islandora/object/reports:19 (accessed on 10 October 2017).
- Estey, L.; Meerten, C. TEQC: The multi-purpose toolkit for GPS/GLONASS data. GPS Solut. 1999, 3, 42–49. [Google Scholar] [CrossRef]
- Wang, G.; Jong, K.; Zhao, Q.; Hu, Z.; Guo, J. Multipath analysis of code measurements for beidou geostationary satellites. GPS Solut. 2014, 19, 129–139. [Google Scholar] [CrossRef]
- Montenbruck, O.; Andres, Y.; Bock, H.; Helleputte, T.; Ijssel, J.; Loiselet, M.; Marquardt, C.; Silvestrin, P.; Visser, P.; Yoon, Y. Tracking and orbit determination performance of the GRAS instrument on MetOp-A. GPS Solut. 2008, 12, 289–299. [Google Scholar] [CrossRef]
- Choy, S. High accuracy precise point positioning using a single frequency GPS receiver. J. Appl. Geodesy 2011, 5, 59–69. [Google Scholar] [CrossRef]
- Montenbruck, O. Kinematic gps positioning of leo satellites using ionosphere-free single frequency measurements. Aerosp. Sci. Technol. 2003, 7, 396–405. [Google Scholar] [CrossRef]
- Guo, X.; Zhang, Q.; Zhao, Q.; Guo, J. Precise orbit determination for LEO satellites using single-frequency GPS observation. Chin. Space Sci. Technol. 2013, 33, 41–46. [Google Scholar]
- Peng, D.; Wu, B. The application of GIM in precise orbit determination for LEO satellites with single-frequency GPS measurements. Acta Astron. Sin. 2012, 53, 36–50. [Google Scholar]
- Liu, J.; Ge, M. PANDA software and its preliminary result of positioning and orbit determination. Wuhan Univ. J. Nat. Sci. 2003, 8, 603–609. [Google Scholar] [CrossRef]
- Shi, C.; Zhao, Q.; Geng, J.; Lou, Y.; Ge, M.; Liu, J. Recent development of PANDA software in GNSS data processing. In Proceedings of the SPIE 7285, International Conference on Earth Observation Data Processing and Analysis (ICEODPA), Wuhan, China, 28–30 December 2008; pp. 72851S1–72851S9. [Google Scholar] [CrossRef]
- Guo, J.; Xu, X.; Zhao, Q.; Liu, J. Precise orbit determination for quad-constellation satellites at Wuhan University: Strategy, result validation, and comparison. J. Geodesy 2016, 90, 143–159. [Google Scholar] [CrossRef]
- Guo, F.; Li, X.; Zhang, X.; Wang, J. Assessment of precise orbit and clock products for Galileo, BeiDou, and QZSS from IGS Multi-GNSS Experiment (MGEX). GPS Solut. 2017, 21, 279–290. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. IERS Conventions 2010; International Earth Rotation and Reference Systems Service (IERS): Frankfurt, Germany, 2010. [Google Scholar]
- Gambis, D. Monitoring Earth orientation using space-geodetic techniques: State-of-the-art and prospective. J. Geodesy 2004, 78, 295–303. [Google Scholar] [CrossRef]
- Lyard, F.; Lefevre, F.; Letellier, T.; Francis, O. Modelling the global ocean tides: Modern insights from FES2004. Ocean Dyn. 2006, 56, 394–415. [Google Scholar] [CrossRef]
- Desai, S. Observing the pole tide with satellite altimetry. J. Geophys. Res. 2002, 107, 3186. [Google Scholar] [CrossRef]
- Bruinsma, S. The DTM-2013 thermosphere model. J. Space Weather Space Clim. 2015, 5, 1–8. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elevation (°) | Linear Model Node Values (m) | ||||||
|---|---|---|---|---|---|---|---|
| GEO | IGSO | MEO | |||||
| B1 (C01–C04) | B1 (C05) | B2 | B1 | B2 | B1 | B2 | |
| 0 | −0.14 | −0.43 | −0.46 | −0.38 | −0.45 | −0.42 | −0.41 |
| 10 | −0.25 | −0.37 | −0.27 | −0.35 | −0.30 | −0.37 | −0.30 |
| 20 | −0.27 | −0.31 | −0.26 | −0.34 | −0.31 | −0.35 | −0.34 |
| 30 | −0.18 | −0.17 | −0.14 | −0.22 | −0.17 | −0.24 | −0.20 |
| 40 | −0.09 | −0.14 | −0.09 | −0.12 | −0.10 | −0.17 | −0.14 |
| 50 | −0.05 | −0.01 | 0.01 | −0.01 | 0.00 | −0.03 | −0.00 |
| 60 | 0.03 | 0.17 | 0.12 | 0.13 | 0.11 | 0.19 | 0.16 |
| 70 | 0.12 | 0.32 | 0.20 | 0.24 | 0.21 | 0.56 | 0.39 |
| 80 | 0.12 | 0.45 | 0.25 | 0.28 | 0.27 | 0.94 | 0.56 |
| 90 | 0.22 | 0.69 | 0.31 | 0.36 | 0.35 | 1.02 | 0.63 |
| Elevation (°) | Differences with Wanninger and Beer’s Model (m) | |||
|---|---|---|---|---|
| IGSO | MEO | |||
| B1-Wa | B2-Wa | B1-Wa | B2-Wa | |
| 0 | −0.17 | 0.26 | 0.05 | −0.01 |
| 10 | −0.05 | 0.06 | 0.01 | 0.01 |
| 20 | 0.00 | 0.02 | −0.03 | −0.08 |
| 30 | 0.01 | 0.02 | −0.01 | −0.02 |
| 40 | 0.03 | 0.04 | −0.06 | −0.08 |
| 50 | 0.03 | 0.03 | −0.09 | −0.09 |
| 60 | 0.04 | 0.03 | −0.15 | −0.12 |
| 70 | 0.05 | 0.04 | −0.14 | −0.09 |
| 80 | 0.01 | 0.03 | −0.03 | −0.08 |
| 90 | 0.01 | 0.02 | −0.03 | −0.06 |
| AVG | 0.00 | 0.06 | −0.05 | −0.06 |
| RMS | 0.06 | 0.09 | 0.08 | 0.07 |
| Items | Description |
|---|---|
| Gravity model | EIGEN-06C, up to degree and order 120 for static field and 50 for time-varying gravity |
| Precession and nutation | IERS 2010 [23] |
| Earth orientation | IERS C-04 [24] |
| Solid Earth tide and pole tide | IERS 2010 [23] |
| Ocean tide | FES2004 30 × 30 [25] |
| Ocean pole tides | Desai [26] |
| N-body perturbation | JPL DE405 |
| Relativity | IERS 2010 [23] |
| Solar radiation pressure | Box-wing model |
| Atmosphere drag | DTM2013 [27], piece-wise drag coefficients estimated every 360 min |
| Attitude | Nominal |
| Fengyun-3C PCO (X/Y/Z: m) & PCV | −1.2750/0.2820/−0.9837, PCV not considered |
| BDS PCO & PCV | model from Guo et al. [21] |
| Empirical forces | piece-wise periodical terms in along- and cross-track direction estimated every 360 min |
| BDS observation type | B1 |
| Observation interval | 30 s |
| BDS orbit and clock | Wuhan University precise products (30-s clock) |
| ionosphere delay | Graphic combination |
| orbit determination arc length | 30 h |
| Elevation cutoff | 0° |
| Fengyun-3C initial state | Position and velocity at initial epoch |
| Receiver clock | One per epoch as process noise |
| Ambiguities | One per pass |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, K.; Li, M.; Zhao, Q.; Li, W.; Guo, X. BeiDou Geostationary Satellite Code Bias Modeling Using Fengyun-3C Onboard Measurements. Sensors 2017, 17, 2460. https://doi.org/10.3390/s17112460
Jiang K, Li M, Zhao Q, Li W, Guo X. BeiDou Geostationary Satellite Code Bias Modeling Using Fengyun-3C Onboard Measurements. Sensors. 2017; 17(11):2460. https://doi.org/10.3390/s17112460
Chicago/Turabian StyleJiang, Kecai, Min Li, Qile Zhao, Wenwen Li, and Xiang Guo. 2017. "BeiDou Geostationary Satellite Code Bias Modeling Using Fengyun-3C Onboard Measurements" Sensors 17, no. 11: 2460. https://doi.org/10.3390/s17112460
APA StyleJiang, K., Li, M., Zhao, Q., Li, W., & Guo, X. (2017). BeiDou Geostationary Satellite Code Bias Modeling Using Fengyun-3C Onboard Measurements. Sensors, 17(11), 2460. https://doi.org/10.3390/s17112460