Real-Time Alpine Measurement System Using Wireless Sensor Networks

 , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Hardware
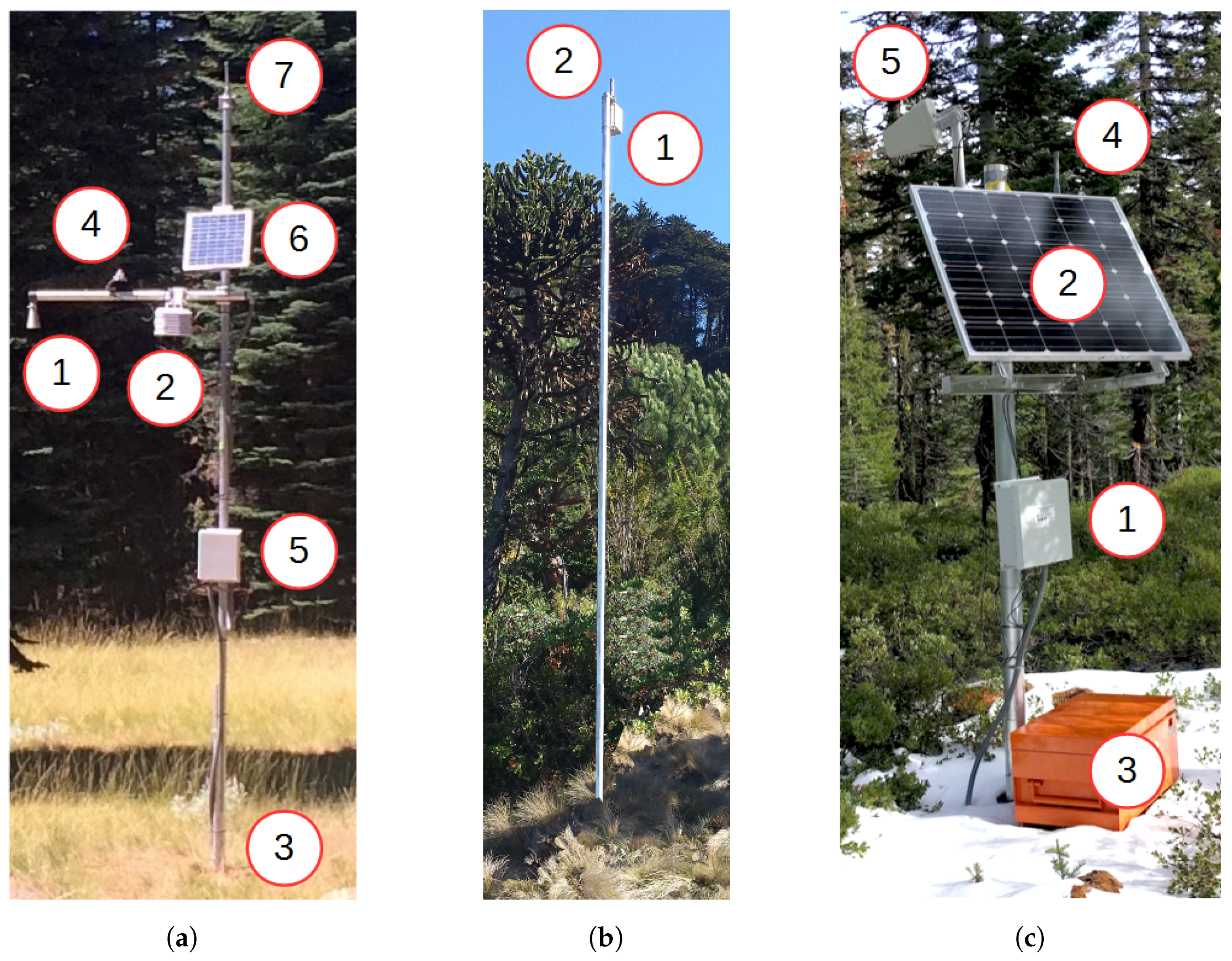
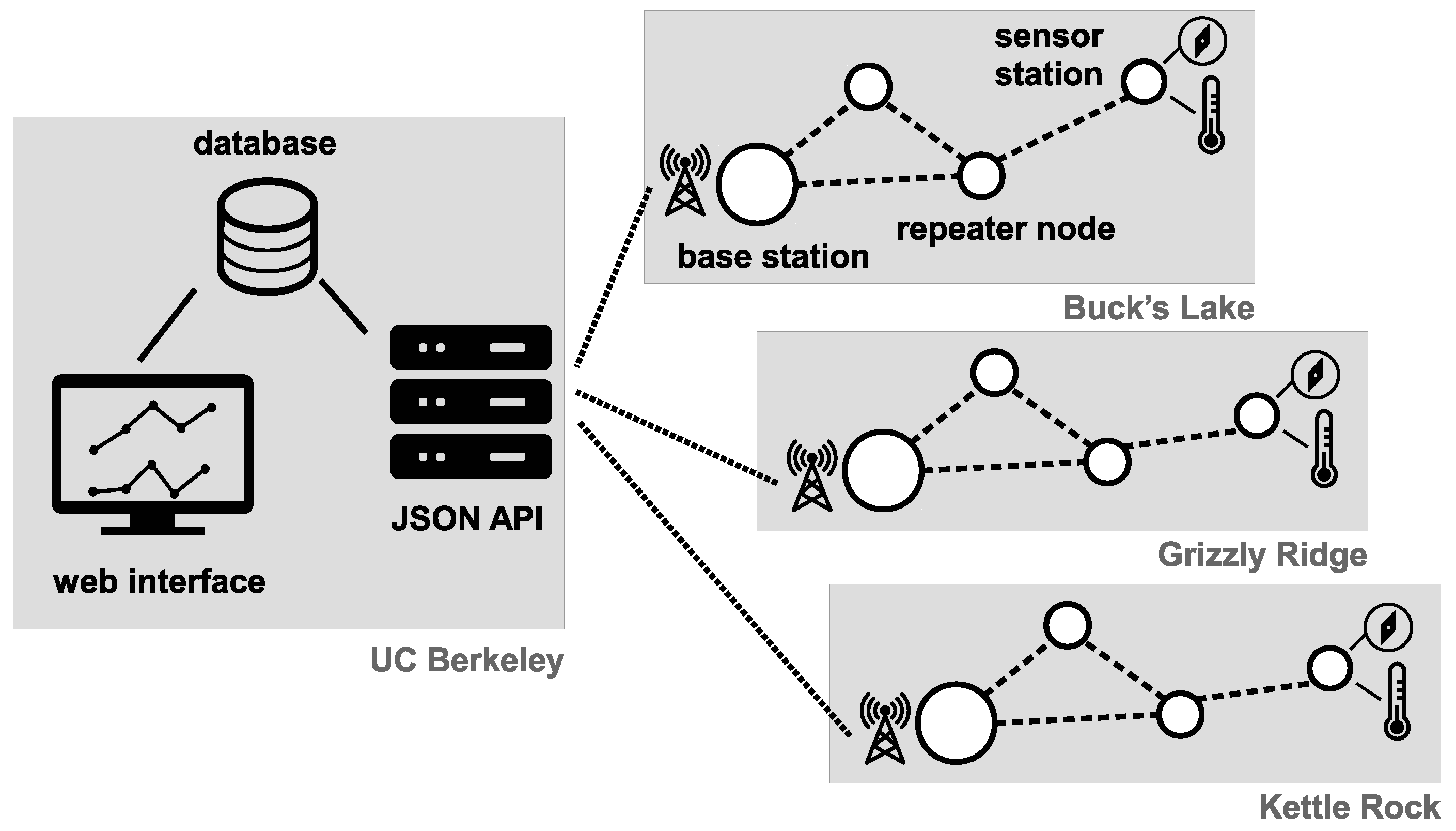
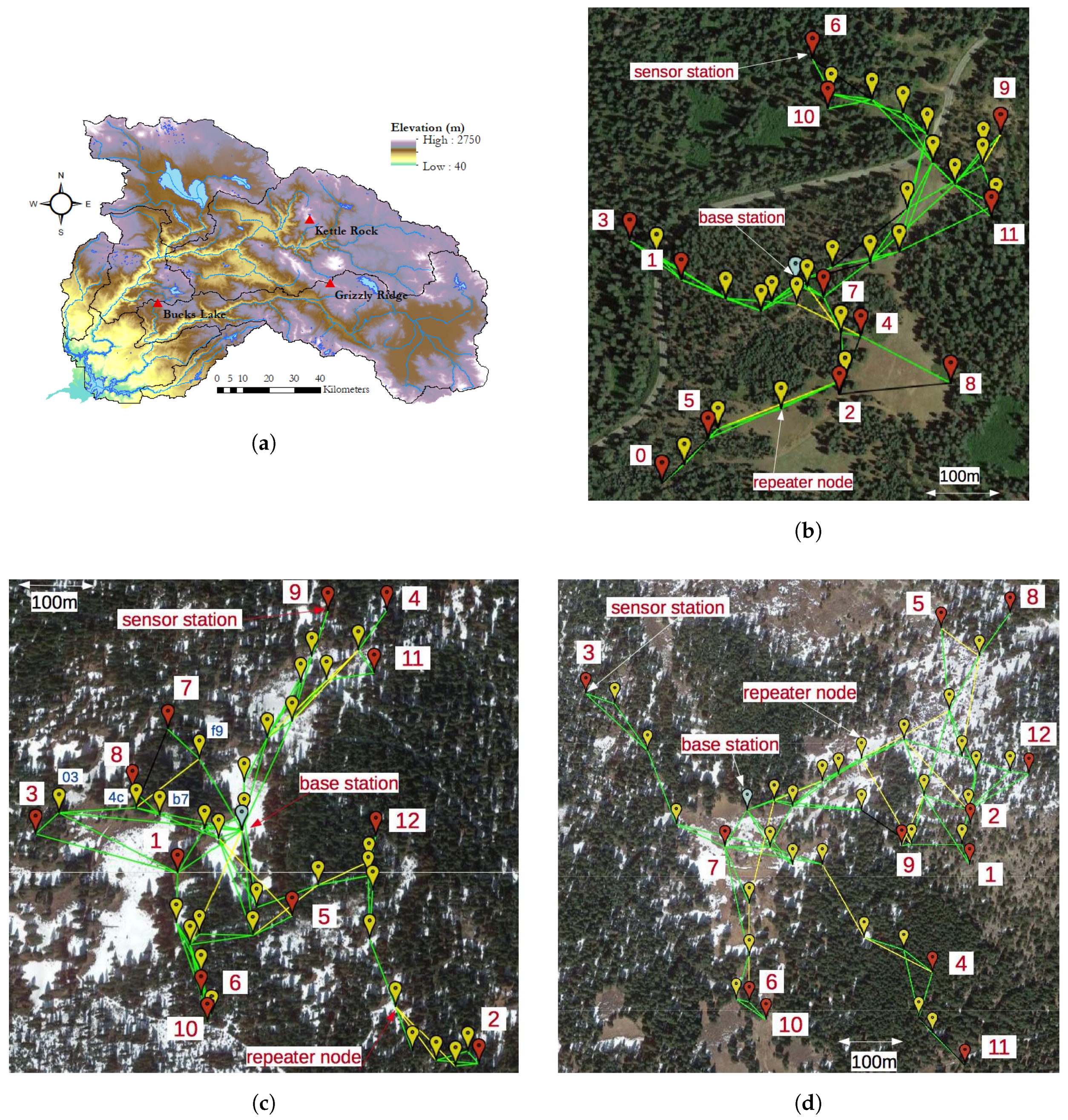
- Sensor stations (Figure 1a) are installed at physiographically representative locations within network clusters and measures snow and meteorological variables, which are transmitted to the base station.
- In case the sensor station is too far from the base station for direct communication, repeater nodes (Figure 1b) are installed to serve as data relays. They also maintain the redundancy of a full mesh network.
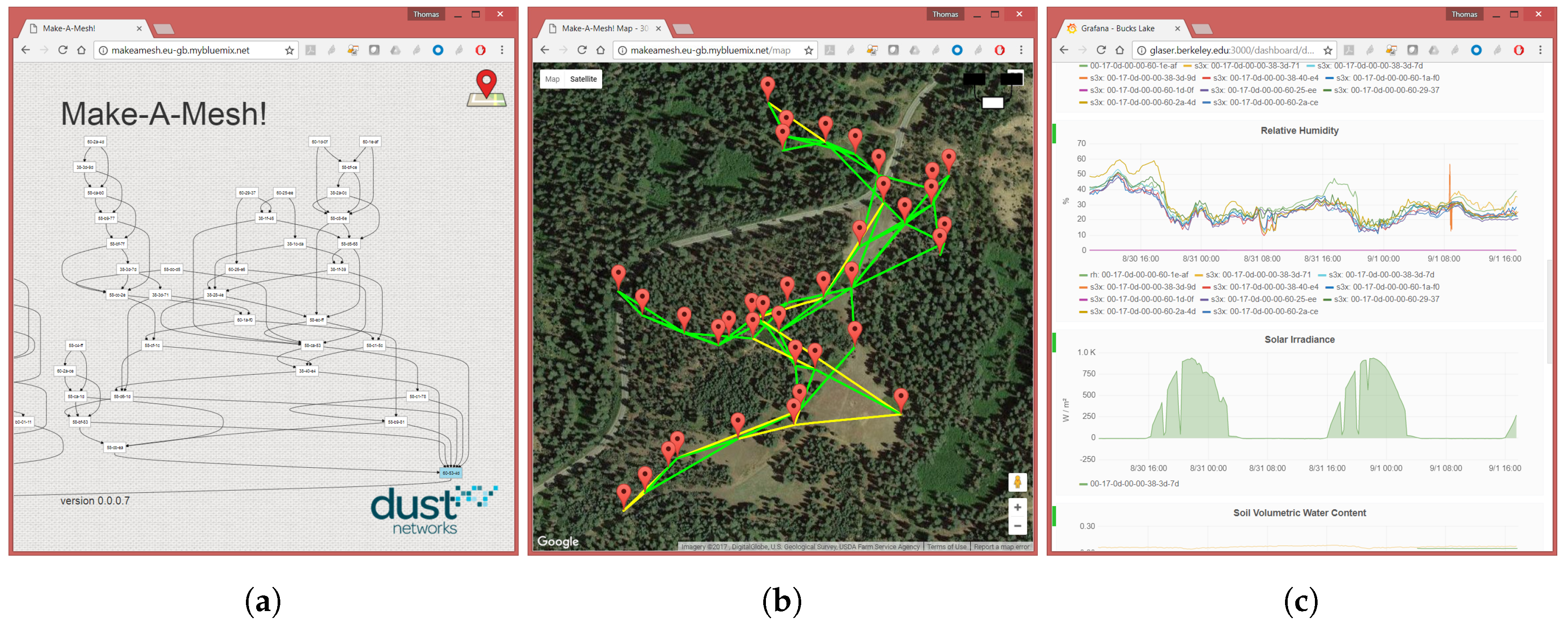
- The base station (Figure 1c) serves as a collection point for all the data gathered by the sensor stations, and forwards this data to the server over a cellular Internet link.
- The server receives, stores and displays the data (not shown).
2.1.1. Sensor Station
- MB7363 Maxbotix ultrasonic range-finder ① can be mounted on the tip of the crossarm, oriented downwards. It measures the distance to ground or snow by measuring the round-trip time of an ultrasonic pulse. It has a resolution of 1 mm, an accuracy of 1%, and a range of 50 cm to 10 m. Like all ultrasonic devices, it is less accurate while it is snowing. We obtain the snow height by subtracting the distance measured when there is no snow.
- Temperature and relative humidity is measured by a Sensirion SHT25 sensor ②. It is enclosed in a radiation shield, and mounted about halfway across the crossarm.
- Decagon GS3 soil-moisture sensor ③ which measures soil dielectric constant, electric conductivity and temperature. Soil moisture is more accurately estimated via a calibration relation (http://manuals.decagon.com/Manuals/13822_GS3_Web.pdf). Results reported have not been locally calibrated. Two such sensors are installed per sensor station, at depths of 25 cm and 50 cm into the ground.
- Hukesflux LP02 pyranometer solar radiation sensor ④. One solar radiation sensor per WSN is installed in an open area. Unshaded solar radiation tends to be uniform across a 1–2 km area.
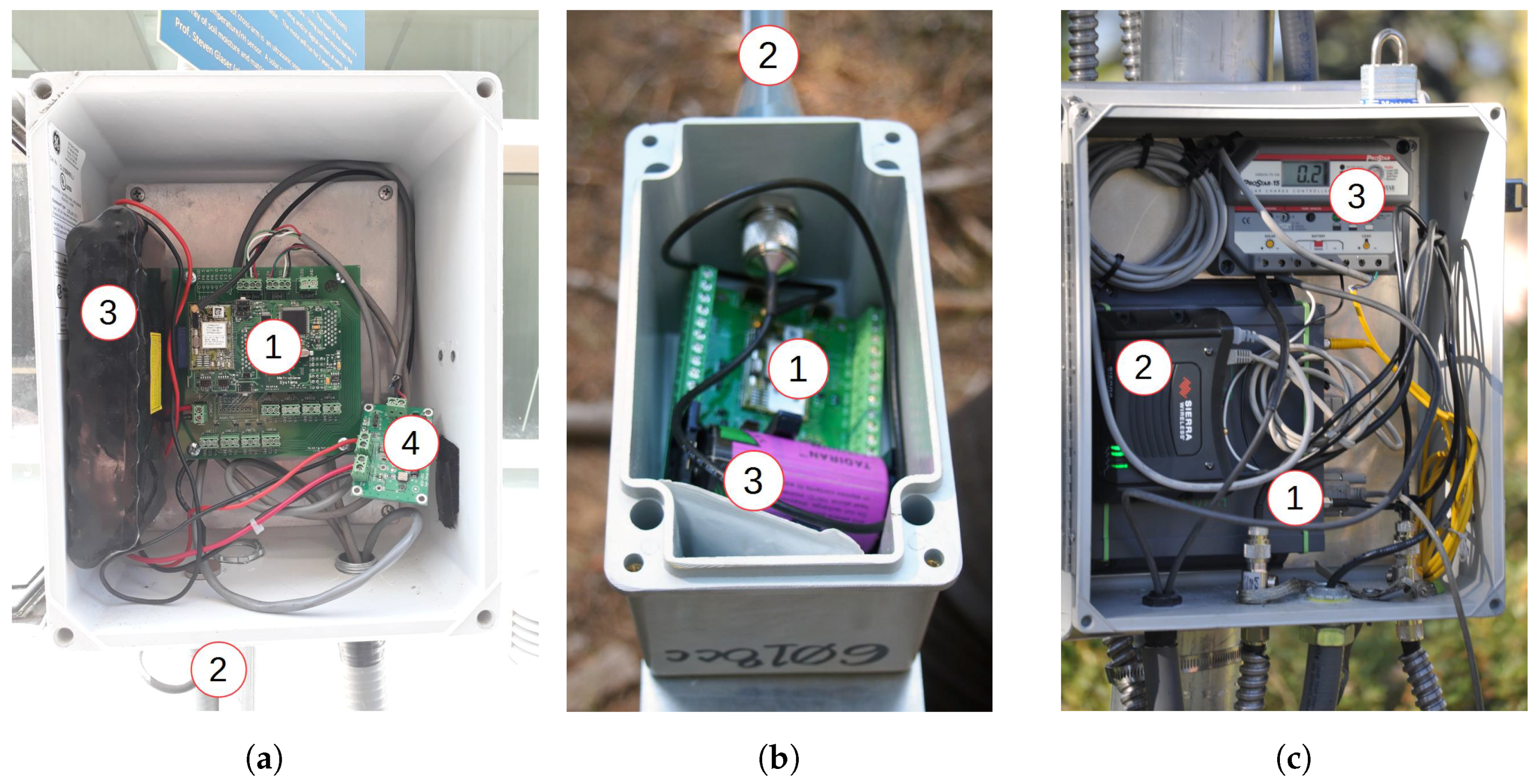
2.1.2. Repeater Node
2.1.3. Base Station
2.1.4. Server
2.2. Low-Power Wireless Mesh Network
2.3. Software Architecture
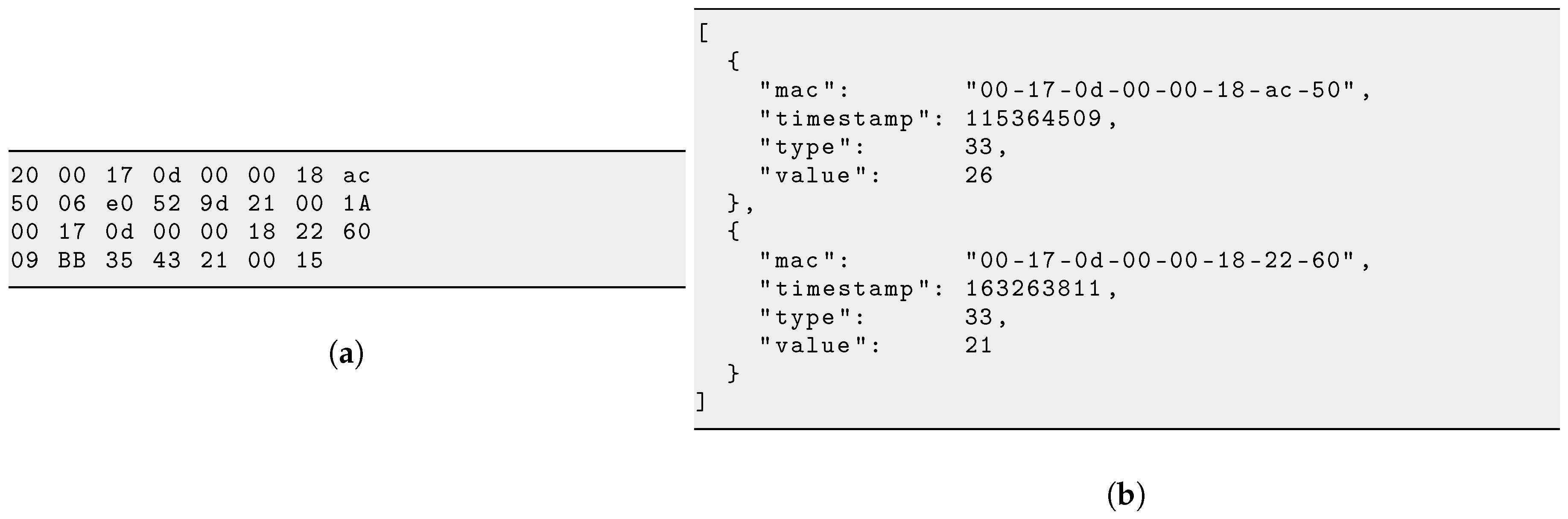
2.3.1. Sensor Object Library (SOL)
2.3.2. Sensor Station Firmware
2.3.3. Repeater Node Configuration
2.3.4. Base Station Software
2.3.5. Server Software
2.4. Deployment Strategy
3. Results
3.1. Deployments
3.2. Examples of Hydrologic Data from WSNs
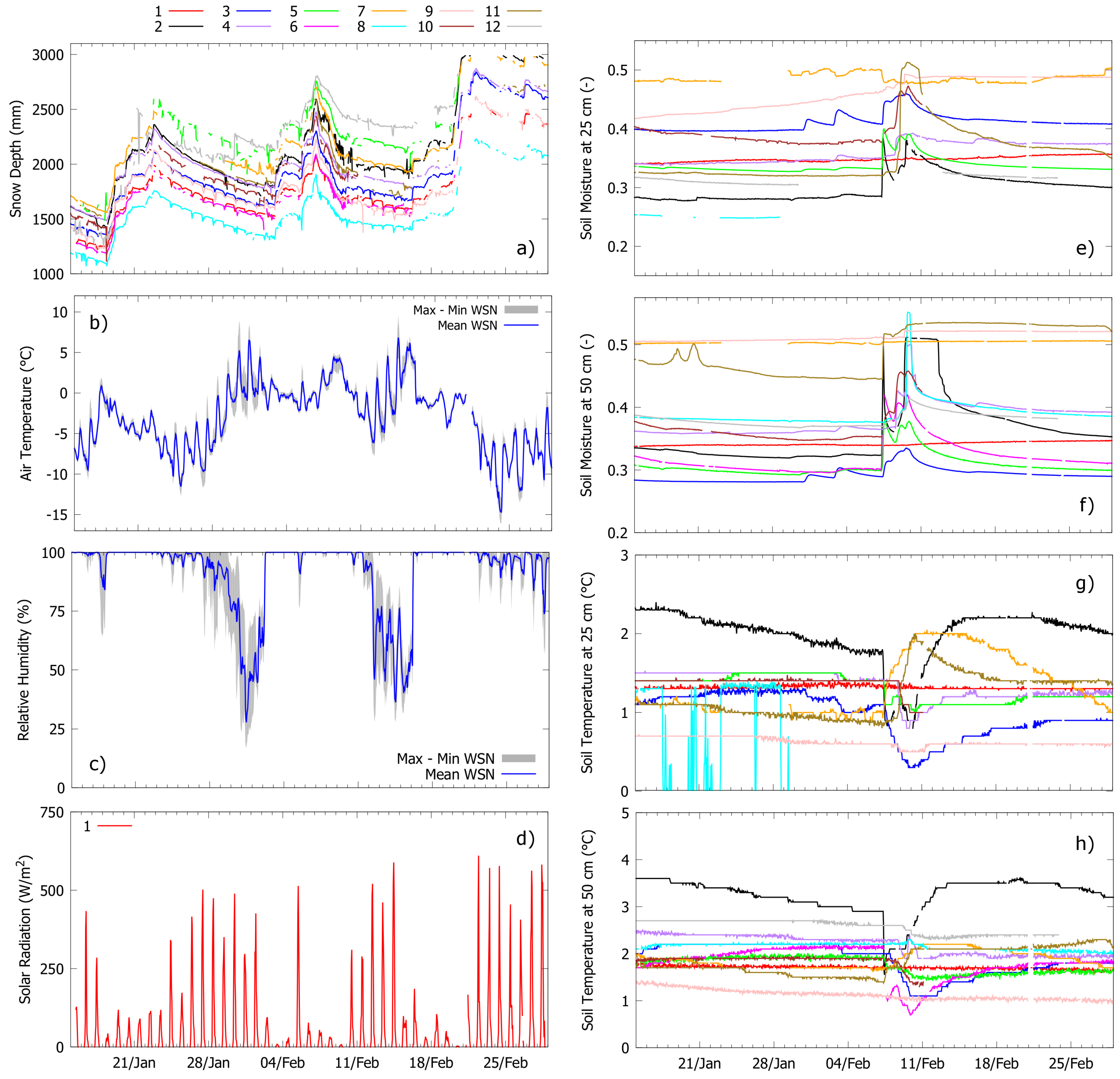
3.2.1. Accumulation Period
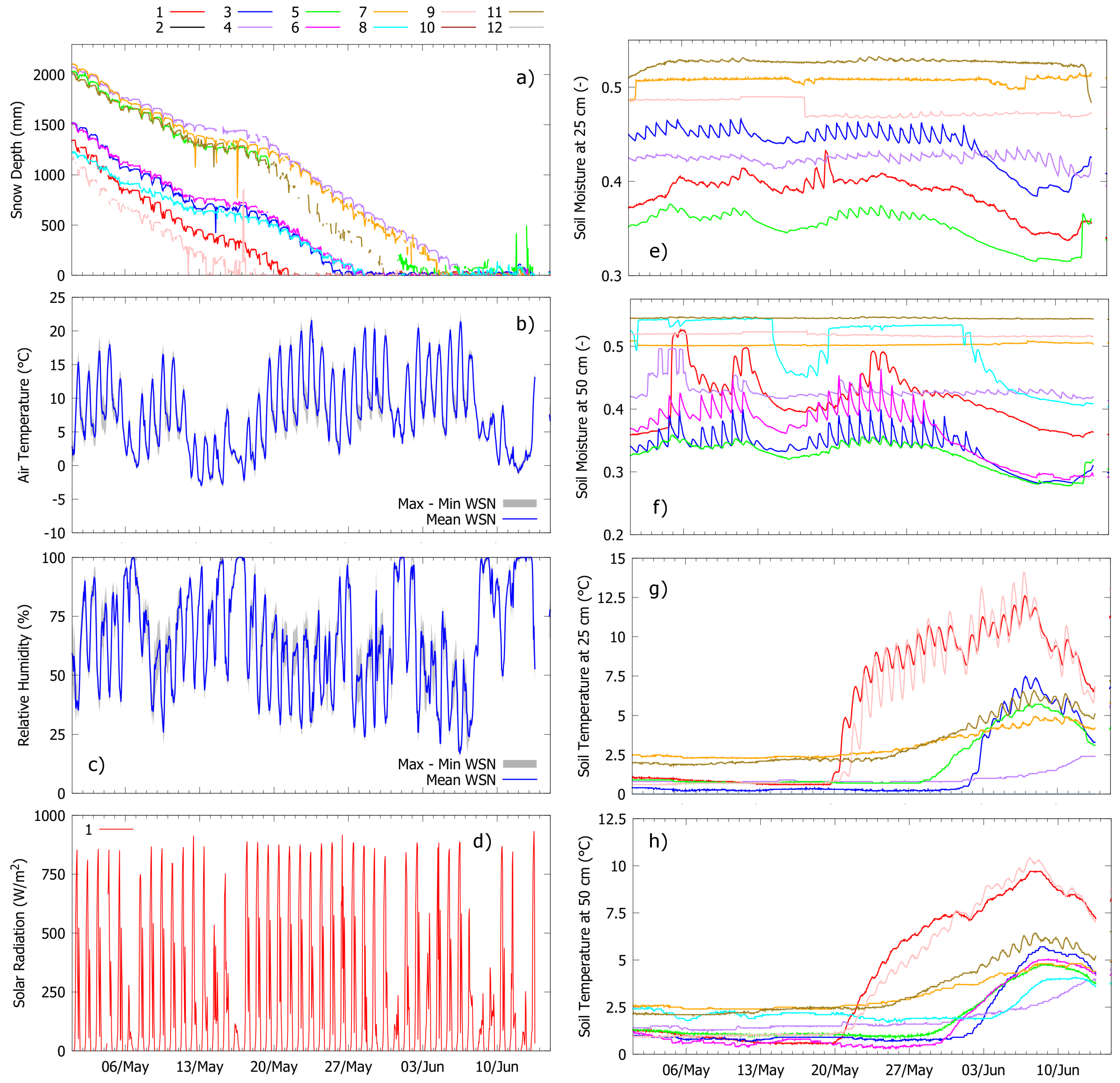
3.2.2. Snowmelt Period
3.2.3. Comparison with Pre-Existing Survey Techniques: Snow Courses
3.3. Network Performance
3.3.1. Estimated Performance
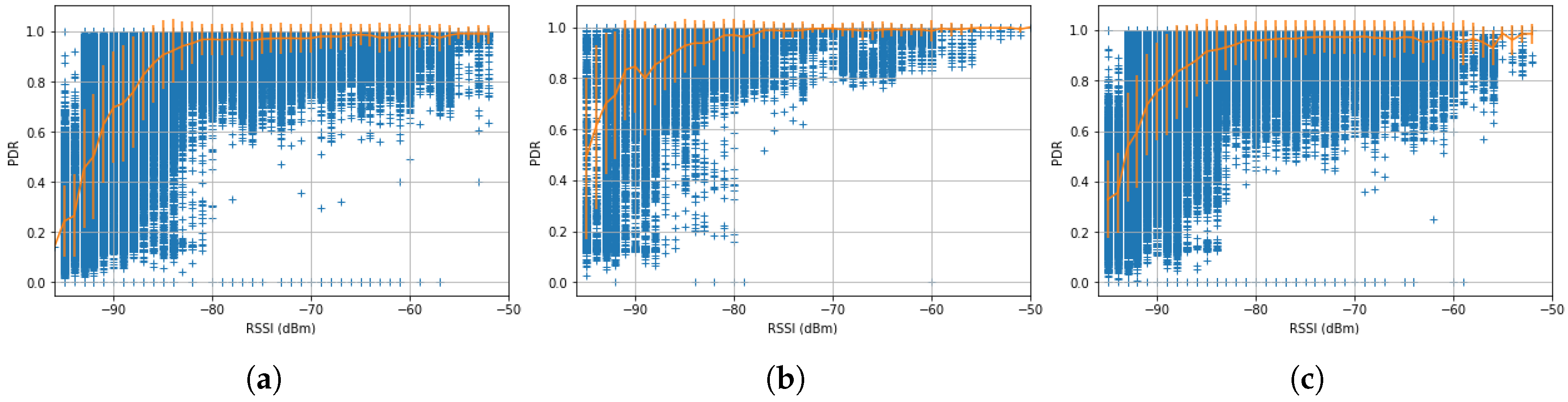
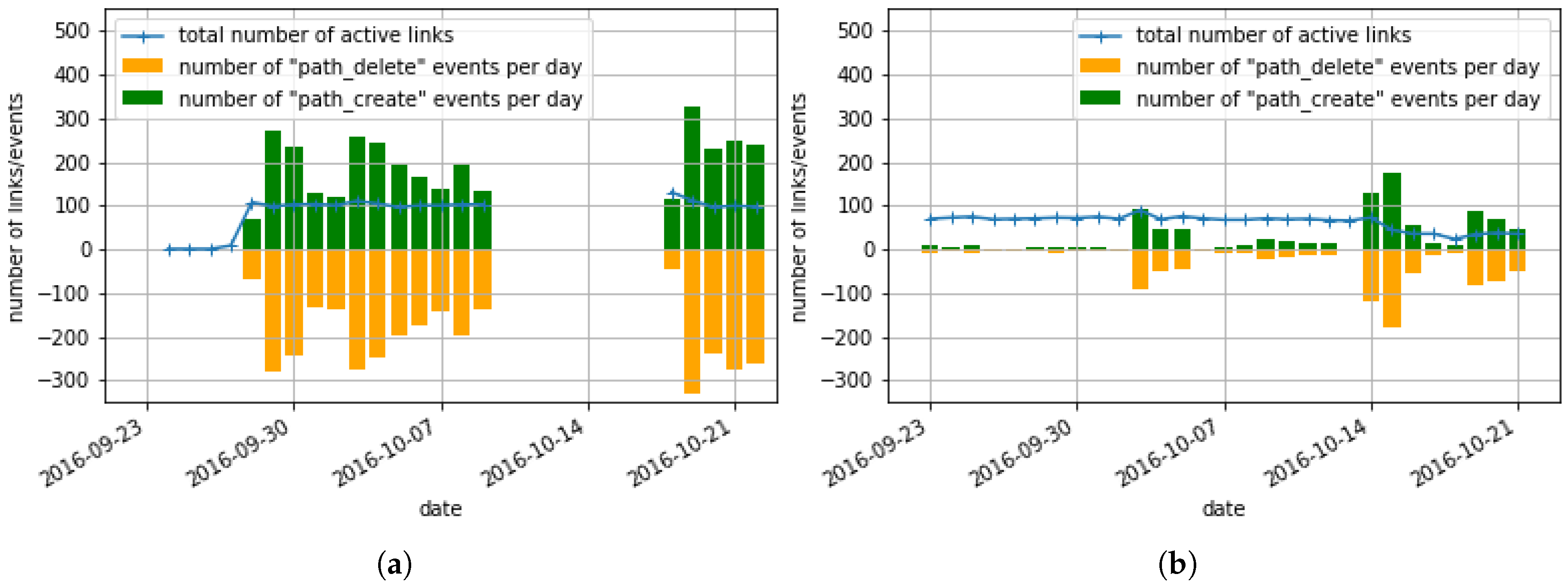
3.3.2. Measured Performance
4. Discussion
4.1. Value of the Hydrologic Product
4.2. Design Choices: Comparison with Other Wireless Solutions
Rationale for using SmartMesh IP
4.3. Comparison with Existing WSN Systems for Snow Monitoring
4.4. Challenges and Lessons Learned
- We experienced prolonged power failures at the Bucks Lake manager due to the misplacement of the manager node in a poorly irradiated location shaded by canopy. The manager cell modem was configured to shutdown at 11 V to stop draining the battery, which was devoted to powering the WSN network manager. This allowed the WSN to keep operating locally, but without real-time publishing, a major issue for a real-time system. Both Kettle and Grizzly managers were better placed and did not exhibit such a problem, highlighting the need for considering canopy coverage during the design phase. Additional batteries were added to the Bucks Lake base station to prevent future outages. Relocating the solar panel could also be a solution, where/when feasible.
- Some repeaters disconnected due to the original design of repeater layout. A choice was initially made to connect the repeater antennas through the top of the repeater box, sealing the mechanical connection with silicone caulk to prevent water seepage into the enclosure. Poor construction of the antennas prevented water from draining out of the bottom of the vented antenna. This disconnected some nodes from the network. Real-time link health maps Figure 7 allowed for the timely discovery of the issue, and after drilling small holes in the clogged antennas, repeaters became functional again.
- A firmware/hardware bug prevented some sensor nodes from sampling and sending data after a power recovery from a total battery discharge. The bug was attributed to the gradual voltage increase during recharge that mainly affected the real time clock component. The problem was subsequently fixed by adding a power-up voltage threshold and a delay to guarantee the different NeoMote components are operational before the main code starts. Only a few nodes exhibited this behavior, which was resolved by the code update.
- We experienced extensive rodent damage to exposed antenna, sensor and solar power wires, especially at Bucks Lake. The cables close to the ground were all in metal conduit but the wires from the solar panel and temp/rH at the 5 m level were exposed. The 5 m of snow in 2017 allowed the pesky rodents to access these exposed wires. System resiliency can be improved by appropriately shielding all wires from wildlife.
- Solar panels, antennas, and snow depth sensors at several nodes were buried in snow for a few days during peak accumulation. This design issue was due to the abundant precipitation that occurred in the 2017 winter (we estimate about 4000 mm of total precipitation at Bucks Lake, with peak SWE around 1400 mm). This season demonstrated that choosing the most suitable height a priori depends on consideration of extremes and could be difficult in a context of climate change-related extreme weather events. We recommend allowing for unanticipated extreme events during the design phase. In particular, efforts should be made to keep the base and sensor stations’ antennas and the solar panel at the base station functional, as this is the most sensitive part of the network, Sensor stations can last several months on a full charge, so buried solar panels were of limited consequence. In addition, redundancy of nodes at the same site makes the network resilient to localized failures compared to standard index stations.
- Hierarchy of criticalities: In such large-scale systems, it is important to identify and classify system elements based on their importance to the overall system operation. For instance, the base station power and connectivity to the Internet are far more critical than that of a sensor node, which in turn is more important than that of a repeater.
- Adequate Testing: In-lab testing for such systems is crucial. Moreover, testing in similar but easily accessible environments would also be an asset. Failures of temperature and humidity sensors that were then observed in the field first occurred in the UC Botanical Garden test network where weather conditions are closer to the mountains than lab settings.
4.5. Future R&D Directions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Romanov, P.; Gutman, G.; Csiszar, I. Automated Monitoring of Snow Cover over North America with Multispectral Satellite Data. J. Appl. Meteorol. 2000, 39, 1866–1880. [Google Scholar] [CrossRef]
- Barnett, T.; Adam, J.; Lettenmaier, D. Potential Impacts of a Warming Climate on Water Availability in Snow-dominated Regions. Nature 2005, 438, 303–309. [Google Scholar] [CrossRef] [PubMed]
- Sturm, M.; Goldstein, M.A. Water and Life from Snow: A Trillion Dollar Science Question. Water Resour. Res. 2017, 53, 3534–3544. [Google Scholar] [CrossRef]
- Laghari, J. Climate Change: Melting Glaciers Bring Energy Uncertainty. Nature 2013, 502, 617–618. [Google Scholar] [CrossRef] [PubMed]
- Rheinheimer, D.E.; Viers, J.H.; Sieber, J.; Kiparsky, M.; Mehta, V.K.; Ligare, S.T. Simulating High-Elevation Hydropower with Regional Climate Warming in the West Slope, Sierra Nevada. J. Water Resour. Plan. Manag. 2014, 140, 714–723. [Google Scholar] [CrossRef]
- Ho, M.; Lall, U.; Allaire, M.; Devineni, N.; Kwon, H.H.; Pal, I.; Raff, D.; Wegner, D. The Future Role of Dams in the United States of America. Water Resour. Res. 2017, 53, 982–998. [Google Scholar] [CrossRef]
- Finger, D.; Heinrich, G.; Gobiet, A.; Bauder, A. Projections of Future Water Resources and Their Uncertainty in a Glacierized Catchment in the Swiss Alps and the Subsequent Effects on Hydropower Production during the 21st Century. Water Resour. Res. 2012, 48, 1–20. [Google Scholar] [CrossRef]
- Zhang, Z.; Glaser, S.D.; Watteyne, T.; Malek, S. Long-term Monitoring of the Sierra Nevada Snowpack Using Wireless Sensor Networks. IEEE Internet Things J. 2016, 12, 1–9. [Google Scholar]
- Milly, P.; Betancourt, J.; Falkenmark, M.; Hirsch, R.M.; Zbigniew, W.; Lettenmaier, D.P.; Stouffer, R.J. Stationarity Is Dead: Whither Water Management? Science 2008, 319, 573–574. [Google Scholar] [CrossRef] [PubMed]
- Markstrom, S.L.; Regan, R.S.; Hay, L.E.; Viger, R.J.; Webb, R.M.; Payn, R.A.; LaFontaine, J.H. PRMS-IV, the Precipitation-Runoff Modeling System, Version 4; Technical Report; U.S. Geological Survey Techniques and Methods: Reston, VA, USA, 2015.
- Lehning, M.; Völksch, I.; Gustafsson, D.; Nguyen, T.A.; Stähli, M.; Zappa, M. ALPINE3D: A Detailed Model of Mountain Surface Processes and its Application to Snow Hydrology. Hydrol. Process. 2006, 20, 2111–2128. [Google Scholar] [CrossRef]
- Martinec, J.; Rango, A.; Roberts, R.; Baumgartner, M.F. Snowmelt Runoff Model (SRM) User’s Manual; University of Berne: Bern, Switzerland, 1998. [Google Scholar]
- Bavera, D.; Bavay, M.; Jonas, T.; Lehning, M.; De Michele, C. A Comparison Between Two Statistical and a Physically-based Model in Snow Water Equivalent Mapping. Adv. Water Resour. 2014, 63, 167–178. [Google Scholar] [CrossRef]
- Elder, K.; Cline, D.; Liston, G.E.; Armstrong, R. NASA Cold Land Processes Experiment (CLPX 2002/03): Field Measurements of Snowpack Properties and Soil Moisture. J. Hydrometeorol. 2009, 10, 320–329. [Google Scholar] [CrossRef]
- Serreze, M.C.; Clark, M.P.; Armstrong, R.L.; McGinnis, D.A.; Pulwarty, R.S. Characteristics of the Western United States Snowpack from Snowpack Telemetry (SNOTEL) Data. Water Resour. Res. 1999, 35, 2145–2160. [Google Scholar] [CrossRef]
- Ryan, W.A.; Doesken, N.J.; Fassnacht, S.R. Evaluation of Ultrasonic Snow Depth Sensors for U.S. Snow Measurements. J. Atmos. Ocean. Technol. 2008, 25, 667–684. [Google Scholar] [CrossRef]
- Avanzi, F.; De Michele, C.; Ghezzi, A.; Jommi, C.; Pepe, M. A Processing-Modeling Routine to use SNOTEL Hourly Data in Snowpack Dynamic Models. Adv. Water Resour. 2014, 73, 16–29. [Google Scholar] [CrossRef]
- Johnson, J.B.; Gelvin, A.B.; Duvoy, P.; Schaefer, G.L.; Poole, G.; Horton, G.D. Performance Characteristics of a New Electronic Snow Water Equivalent Sensor in Different Climates. Hydrol. Process. 2015, 29, 1418–1433. [Google Scholar] [CrossRef]
- Prokop, A.; Schirmer, M.; Rub, M.; Lehning, M.; Stocker, M. A comparison of measurement methods: Terrestrial laser scanning, tachymetry and snow probing for the determination of the spatial snow-depth distribution on slopes. Ann. Glaciol. 2008, 49, 210–216. [Google Scholar] [CrossRef]
- Revuelto, J.; Vionnet, V.; López-Moreno, J.I.; Lafaysse, M.; Morin, S. Combining Snowpack Modeling and Terrestrial Laser Scanner Observations Improves the Simulation of Small Scale Snow Dynamics. J. Hydrol. 2016, 533, 291–307. [Google Scholar] [CrossRef]
- Painter, T.H.; Berisford, D.F.; Boardman, J.W.; Bormann, K.J.; Deems, J.S.; Gehrke, F.; Hedrick, A.; Joyce, M.; Laidlaw, R.; Marks, D.; et al. The Airborne Snow Observatory: Fusion of Scanning Lidar, Imaging Spectrometer, and Physically-based Modeling for Mapping Snow Water Equivalent and Snow Albedo. Remote Sens. Environ. 2016, 184, 139–152. [Google Scholar] [CrossRef]
- Bühler, Y.; Adams, M.S.; Bösch, R.; Stoffel, A. Mapping Snow Depth in Alpine Terrain with Unmanned Aerial Systems (UASs): Potential and Limitations. Cryosphere 2016, 10, 1075–1088. [Google Scholar] [CrossRef]
- De Michele, C.; Avanzi, F.; Passoni, D.; Barzaghi, R.; Pinto, L.; Dosso, P.; Ghezzi, A.; Gianatti, R.; Vedova, G.D. Using a Fixed-wing UAS to Map Snow Depth Distribution: An Evaluation at Peak Accumulation. Cryosphere 2016, 10, 511–522. [Google Scholar] [CrossRef]
- Harder, P.; Schirmer, M.; Pomeroy, J.; Helgason, W. Accuracy of Snow Depth Estimation in Mountain and Prairie Environments by an Unmanned Aerial Vehicle. Cryosphere 2016, 10, 2559–2571. [Google Scholar] [CrossRef]
- Dietz, A.J.; Kuenzer, C.; Gessner, U.; Dech, S. Remote Sensing of Snow—A Review of Available Methods. Int. J. Remote Sens. 2012, 33, 4094–4134. [Google Scholar] [CrossRef]
- Watteyne, T.; Weiss, J.; Doherty, L.; Simon, J. Industrial IEEE802.15.4e Networks: Performance and Trade-offs. In Proceedings of the IEEE International Conference on Communications (IEEE ICC), London, UK, 8–12 June 2015; pp. 604–609. [Google Scholar]
- Pister, K.S.J.; Doherty, L. TMSP: Time Synchronized Mesh Protocol. In Proceedings of the IASTED International Symposium Distributed Sensor Networks, Orlando, FL, USA, 16–18 November 2008; pp. 391–398. [Google Scholar]
- Brun-Laguna, K.; Watteyne, T.; Malek, S.; Zhang, Z.; Oroza, C.; Glaser, S.D.; Kerkez, B. SOL: An End-to-end Solution for Real-world Remote Monitoring Systems. In Proceedings of the 2016 IEEE 27th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Valencia, Spain, 4–8 September 2016; pp. 1–6. [Google Scholar]
- Bray, T. The JavaScript Object Notation (JSON) Data Interchange Format; Technical Report RFC7159; IETF: Fremont, CA, USA, 2014. [Google Scholar]
- Oroza, C.A.; Zheng, Z.; Glaser, S.D.; Tuia, D.; Bales, R.C. Optimizing Embedded Sensor Network Design for Catchment-scale Snow-depth Estimation Using LiDAR and Machine Learning. Water Resour. Res. 2016, 52, 8174–8189. [Google Scholar] [CrossRef]
- Lee, S.; Younis, M. Optimized relay node placement for connecting disjoint wireless sensor networks. Comput. Netw. 2012, 56, 2788–2804. [Google Scholar] [CrossRef]
- Mehajabin, N.; Razzaque, M.A.; Hassan, M.M.; Almogren, A.; Alamri, A. Energy-sustainable relay node deployment in wireless sensor networks. Comput. Netw. 2016, 104, 108–121. [Google Scholar] [CrossRef]
- Kashyap, A.; Khuller, S.; Shayman, M. Relay placement for higher order connectivity in wireless sensor networks. In Proceedings of the 25th IEEE International Conference on Computer Communications, Barcelona, Spain, 23–29 April 2006; pp. 1–12. [Google Scholar]
- Kerkez, B.; Glaser, S.D.; Bales, R.C.; Meadows, M.W. Design and Performance of a Wireless Sensor Network for Catchment-scale Snow and Soil Moisture Measurements. Water Resour. Res. 2012, 48, 1–18. [Google Scholar] [CrossRef]
- Rice, R.; Bales, R.C. Embedded-sensor network design for snow cover measurements around snow pillow and snow course sites in the Sierra Nevada of California. Water Resour. Res. 2010, 46, W03537. [Google Scholar] [CrossRef]
- Oroza, C.A.; Zhang, Z.; Watteyne, T.; Glaser, S.D. A Machine-Learning Based Connectivity Model for Complex Terrain Large-Scale Low-Power Wireless Deployments. IEEE Trans. Cognit. Commun. Netw. 2017. to appear. [Google Scholar] [CrossRef]
- SmartMesh IP Application Notes. Available online: http://cds.linear.com/docs/en/application-note/SmartMesh_IP_Application_Notes.pdf (accessed on 9 November 2017).
- Lundquist, J.D.; Lott, F. Using Inexpensive Temperature Sensors to Monitor the Duration and Heterogeneity of Snow-covered Areas. Water Resour. Res. 2008, 44, W00D16. [Google Scholar] [CrossRef]
- Watteyne, T.; Mehta, A.; Pister, K. Reliability Through Frequency Diversity: Why Channel Hopping Makes Sense. In Proceedings of the International Symposium on Performance Evaluation of Wireless Ad Hoc, Sensor, and Ubiquitous Networks (PE-WASUN), Tenerife, Canary Islands, Spain, 28–29 2009 October 2009. [Google Scholar]
- Rheinheimer, D.E.; Bales, R.C.; Oroza, C.A.; Lund, J.R.; Viers, J.H. Valuing year-to-go hydrologic forecast improvements for a peaking hydropower system in the Sierra Nevada. Water Resour. Res. 2016, 52, 3815–3828. [Google Scholar] [CrossRef]
- Zhang, Z.; Glaser, S.D.; Bales, R.C.; Martha, C.; Robert, R.; Daniel, M. Insights into Mountain Precipitation and Snowpack from a Basin-scale Wireless Sensor Network. Water Resour. Res. 2017, 53, 6626–6641. [Google Scholar] [CrossRef]
- Sturm, M. White Water: Fifty Years of Snow Research in WRR and the Outlook for the Future. Water Resour. Res. 2015, 51, 4948–4965. [Google Scholar] [CrossRef]
- Bales, R.C.; Molotch, N.P.; Painter, T.H.; Dettinger, M.D.; Rice, R.; Dozier, J. Mountain Hydrology of the Western United States. Water Resour. Res. 2006, 42, 6626–6641. [Google Scholar] [CrossRef]
- Zhang, Z.; Glaser, S.D.; Bales, R.C.; Martha, C.; Daniel, M. Technical Report: The Design and Evaluation of a Basin-scale Wireless Sensor Network for Mountain Hydrology. Water Resour. Res. 2017, 53, 4487–4498. [Google Scholar] [CrossRef]
- Leppänen, L.; Kontu, A.; Hannula, H.R.; Sjöblom, H.; Pulliainen, J. Sodankylä Manual Snow Survey Program. Geosci. Instrum. Methods Data Syst. 2016, 5, 163–179. [Google Scholar] [CrossRef]
- Reba, M.L.; Marks, D.; Seyfried, M.; Winstral, A.; Kumar, M.; Flerchinger, G. A Long-term Data Set for Hydrologic Modeling in a Snow-Dominated Mountain Catchment. Water Resour. Res. 2011, 47, W07702. [Google Scholar] [CrossRef]
- Krajči, P.; Kirnbauer, R.; Parajka, J.; Schöber, J.; Blöschl, G. The Kühtai Data Set: 25 Years of Lysimetric, Snow Pillow, and Meteorological Measurements. Water Resour. Res. 2017, 53, 5158–5165. [Google Scholar] [CrossRef] [PubMed]
- Wever, N.; Schmid, L.; Heilig, A.; Eisen, O.; Fierz, C.; Lehning, M. Verification of the Multi-layer SNOWPACK Model with Different Water Transport Schemes. Cryosphere 2015, 9, 2271–2293. [Google Scholar] [CrossRef] [Green Version]
- Morin, S.; Lejeune, Y.; Lesaffre, B.; Panel, J.M.; Poncet, D.; David, P.; Sudul, M. An 18-yr Long (1993–2011) Snow and Meteorological Dataset from a Mid-altitude Mountain Site (Col de Porte, France, 1325 m alt.) for Driving and Evaluating Snowpack Models. Earth Syst. Sci. Data 2012, 4, 13–21. [Google Scholar] [CrossRef]
- Blöschl, G.; Blaschke, A.P.; Broer, M.; Bucher, C.; Carr, G.; Chen, X.; Eder, A.; Exner-Kittridge, M.; Farnleitner, A.; Flores-Orozco, A.; et al. The Hydrological Open Air Laboratory (HOAL) in Petzenkirchen: A Hypothesis-driven Observatory. Hydrol. Earth Syst. Sci. 2016, 20, 227–255. [Google Scholar] [CrossRef]
- Parajka, J.; Blöschl, G. Validation of MODIS Snow Cover Images over Austria. Hydrol. Earth Syst. Sci. 2006, 10, 679–689. [Google Scholar] [CrossRef]
- Margulis, S.A.; Cortés, G.; Girotto, M.; Durand, M. A Landsat-Era Sierra Nevada Snow Reanalysis (1985–2015). J. Hydrometeorol. 2016, 17, 1203–1221. [Google Scholar] [CrossRef]
- Watteyne, T.; Diedrichs, A.L.; Brun-Laguna, K.; Chaar, J.E.; Dujovne, D.; Taffernaberry, J.C.; Mercado, G. PEACH: Predicting Frost Events in Peach Orchards Using IoT Technology. EAI Endorsed Trans. Int. Thing 2016, 1, e2. [Google Scholar] [CrossRef]
- Henderson, T.; Grant, E.; Luthy, K.; Cintron, J. Snow Monitoring with Sensor Networks. In Proceedings of the 29th Annual IEEE International Conference on Local Computer Networks, Tampa, FL, USA, 16–18 November 2004. [Google Scholar]
- Liao, Y.; Mollineaux, M.; Hsu, R.; Bartlett, R.; Singla, A.; Raja, A.; Bajwa, R.; Rajagopal, R. SnowFort: An Open Source Wireless Sensor Network for Data Analytics in Infrastructure and Environmental Monitoring. IEEE Sens. J. 2014, 14, 4253–4263. [Google Scholar] [CrossRef]
- Skalka, C.; Frolik, J. Snowcloud: A Complete Data Gathering System for Snow Hydrology Research. In Proceedings of the 5th International Workshop, REALWSN 2013, Como, Italy, 19–20 September 2013. [Google Scholar]
- Moeser, C.D.; Walker, M.; Skalka, C.; Frolik, J. Application of a Wireless Sensor Network for Distributed Snow Water Equivalence Estimation. In Proceedings of the Annual Western Snow Conference, Stateline, NV, USA, 18–21 April 2011. [Google Scholar]
- Watteyne, T.; Vilajosana, X.; Kerkez, B.; Chraim, F.; Weekly, K.; Wang, Q.; Glaser, S.; Pister, K. OpenWSN: A standards-based low-power wireless development environment. Trans. Emerg. Telecommun. Technol. 2012, 23, 480–493. [Google Scholar] [CrossRef]
- Xia, C.; Liu, W.; Deng, Q. Cost minimization of wireless sensor networks with unlimited-lifetime energy for monitoring oil pipelines. IEEE/CAA J. Autom. Sin. 2015, 2, 290–295. [Google Scholar]
- Liu, B.; Cui, L.; Si, S.; Wen, Y. Performance measures for systems under multiple environments. IEEE/CAA J. Autom. Sin. 2016, 3, 90–95. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field symbol | Field content |
|---|---|
| M | address of the device which created the object |
| T | timestamp of when the object was created |
| t | type of the object, as defined in the SOL registry |
| L | length of the value field |
| V | value of the object |
| Bucks Lake | Grizzly Ridge | Kettle Rock | |
|---|---|---|---|
| Latitude | 39.850000 | 39.917000 | 40.140000 |
| Longitude | −121.242000 | −120.645000 | −120.715000 |
| Deployment area | 20 ha | 27 ha | 42 ha |
| Num. sensor stations | 12 | 12 | 12 |
| Num. repeater nodes | 22 | 25 | 31 |
| Num. base stations | 1 | 1 | 1 |
| Total num. devices | 35 | 38 | 44 |
| (a) Bucks Lake | ||||
| Sensor Station | Elevation (m asl) | Slope () | Aspect () | Vegetation (%) |
| 0 | 1752.18 | 4.87 | 237.70 | 69 |
| 1 | 1739.24 | 12.73 | 272.04 | 65 |
| 2 | 1769.00 | 0.45 | 158.07 | 52 |
| 3 | 1715.75 | 14.70 | 276.87 | 69 |
| 4 | 1768.86 | 2.15 | 109.49 | 66 |
| 5 | 1754.57 | 9.60 | 318.66 | 57 |
| 6 | 1702.77 | 17.03 | 221.94 | 84 |
| 7 | 1771.00 | 2.00 | 132.53 | 70 |
| 8 | 1753.43 | 4.45 | 89.80 | 24 |
| 9 | 1736.49 | 7.69 | 323.98 | 43 |
| 10 | 1700.23 | 14.04 | 338.58 | 77 |
| 11 | 1744.54 | 3.84 | 53.72 | 71 |
| Mean (site) | 1746.35 | 8.39 | 198.33 | 65 |
| 25 perc. | 1737.28 | 4.35 | 92.49 | 60 |
| 75 perc. | 1758.34 | 11.74 | 314.79 | 77 |
| (b) Grizzly Ridge | ||||
| Sensor Station | Elevation (m asl) | Slope () | Aspect () | Vegetation (%) |
| 1 | 2083.36 | 4.68 | 15.25 | 13 |
| 2 | 2063.50 | 11.09 | 53.60 | 70 |
| 3 | 2101.94 | 5.18 | 102.18 | 55 |
| 4 | 1997.44 | 15.23 | 57.83 | 63 |
| 5 | 2098.09 | 17.77 | 348.08 | 67 |
| 6 | 2109.13 | 10.49 | 327.77 | 55 |
| 7 | 2075.89 | 6.10 | 109.41 | 38 |
| 8 | 2081.81 | 3.24 | 73.01 | 19 |
| 9 | 2019.66 | 11.09 | 47.71 | 51 |
| 10 | 2115.61 | 7.15 | 324.20 | 51 |
| 11 | 2015.63 | 12.17 | 59.33 | 41 |
| 12 | 2070.13 | 16.44 | 39.50 | 73 |
| Mean (site) | 2089.93 | 9.30 | 131.73 | 48 |
| 25 perc. | 2075.19 | 5.35 | 39.76 | 34 |
| 75 perc. | 2113.57 | 12.05 | 228.65 | 64 |
| (c) Kettle Rock | ||||
| Sensor Station | Elevation (m asl) | Slope () | Aspect () | Vegetation (%) |
| 1 | 2228.09 | 17.96 | 196.39 | 45 |
| 2 | 2239.26 | 7.80 | 231.00 | 40 |
| 3 | 2276.69 | 12.30 | 153.34 | 45 |
| 4 | 2171.84 | 14.96 | 179.93 | 88 |
| 5 | 2198.68 | 13.51 | 54.50 | 35 |
| 6 | 2166.72 | 14.18 | 154.13 | 58 |
| 7 | 2210.55 | 8.20 | 179.41 | 0 |
| 8 | 2234.77 | 14.89 | 98.82 | 2 |
| 9 | 2217.44 | 11.40 | 213.00 | 50 |
| 10 | 2157.93 | 8.99 | 156.45 | 61 |
| 11 | 2131.82 | 15.29 | 179.94 | 63 |
| 12 | 2234.41 | 11.67 | 13.83 | 32 |
| Mean (site) | 2213.69 | 10.64 | 159.40 | 42 |
| 25 perc. | 2180.32 | 8.25 | 142.26 | 23 |
| 75 perc. | 2246.90 | 12.95 | 174.52 | 61 |
| Hop | Number of Devices |
| 1 | 5 |
| 2 | 8 |
| 3 | 9 |
| 4 | 9 |
| 5 | 2 |
| 6 | 1 |
| Input Parameter | Value |
| Requested service | 900 s |
| Reporting interval | 900 s |
| Payload size | 50 B |
| Hardware type | 5800 8 dBm |
| Supply voltage | 3.6 V |
| Downstream frame size | 1024 |
| Join duty cycle | 10% |
| Hop | Average Current | Mean latency |
| 1 | 49.7 A | 0.95 s |
| 2 | 38.7 A | 1.87 s |
| 3 | 37.3 A | 2.79 s |
| 4 | 29.5 A | 3.70 s |
| 5 | 32.2 A | 4.62 s |
| 6 | 27.2 A | 5.54 s |
| Estimated Performance Indicator | Value | |
| Manager ave. current | 218 A | |
| Network build time | 24.1 min | |
| Mote search current | 500 A | |
| Bucks Lake | Grizzly Ridge | Kettle Rock | |
|---|---|---|---|
| Average PDR | 89% | 79% | 82% |
| PDR stand. dev. | 16% | 22% | 20% |
| (Transmit/Fails) | (15,654 K/1757 K) | (64,027 K/13,297 K) | (15,654 K/1757 K) |
| Destination Node | PDR | #HR |
|---|---|---|
| Repeater node d3 | 14% | 349 |
| Repeater node 03 | 11% | 72 |
| Repeater node b7 | 9% | 4 |
| Repeater node f9 | 97% | 1422 |
| Repeater node ad | 100% | 2 |
| Repeater node 4c | 14% | 73 |
| Repeater node ac | 9% | 22 |
| Sensor node 8 | 25% | 1297 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Malek, S.A.; Avanzi, F.; Brun-Laguna, K.; Maurer, T.; Oroza, C.A.; Hartsough, P.C.; Watteyne, T.; Glaser, S.D. Real-Time Alpine Measurement System Using Wireless Sensor Networks. Sensors 2017, 17, 2583. https://doi.org/10.3390/s17112583
Malek SA, Avanzi F, Brun-Laguna K, Maurer T, Oroza CA, Hartsough PC, Watteyne T, Glaser SD. Real-Time Alpine Measurement System Using Wireless Sensor Networks. Sensors. 2017; 17(11):2583. https://doi.org/10.3390/s17112583
Chicago/Turabian StyleMalek, Sami A., Francesco Avanzi, Keoma Brun-Laguna, Tessa Maurer, Carlos A. Oroza, Peter C. Hartsough, Thomas Watteyne, and Steven D. Glaser. 2017. "Real-Time Alpine Measurement System Using Wireless Sensor Networks" Sensors 17, no. 11: 2583. https://doi.org/10.3390/s17112583
APA StyleMalek, S. A., Avanzi, F., Brun-Laguna, K., Maurer, T., Oroza, C. A., Hartsough, P. C., Watteyne, T., & Glaser, S. D. (2017). Real-Time Alpine Measurement System Using Wireless Sensor Networks. Sensors, 17(11), 2583. https://doi.org/10.3390/s17112583