An Orientation Sensor-Based Head Tracking System for Driver Behaviour Monitoring

 ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Orientation-Sensor-Based Head Tracking
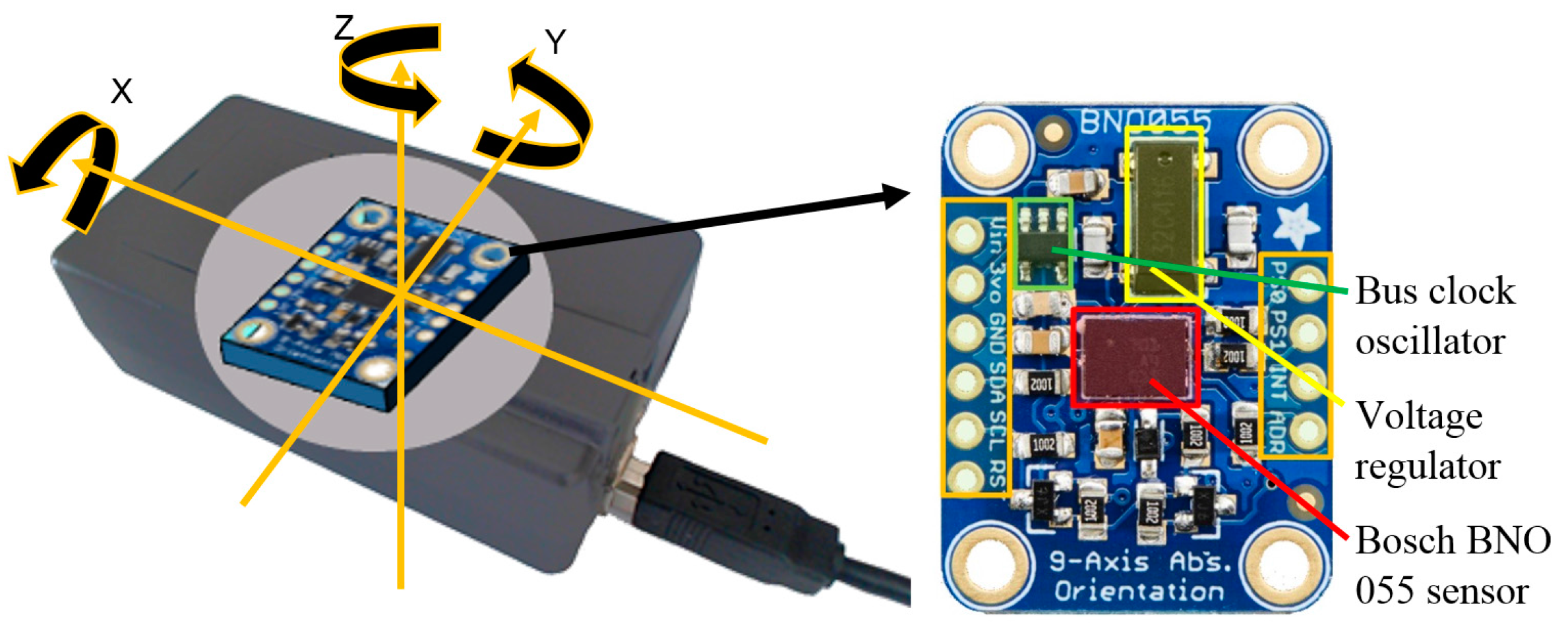
2.1.1. Sensors
2.1.2. Sensor Fusion
2.1.3. Communication
2.1.4. Attachment
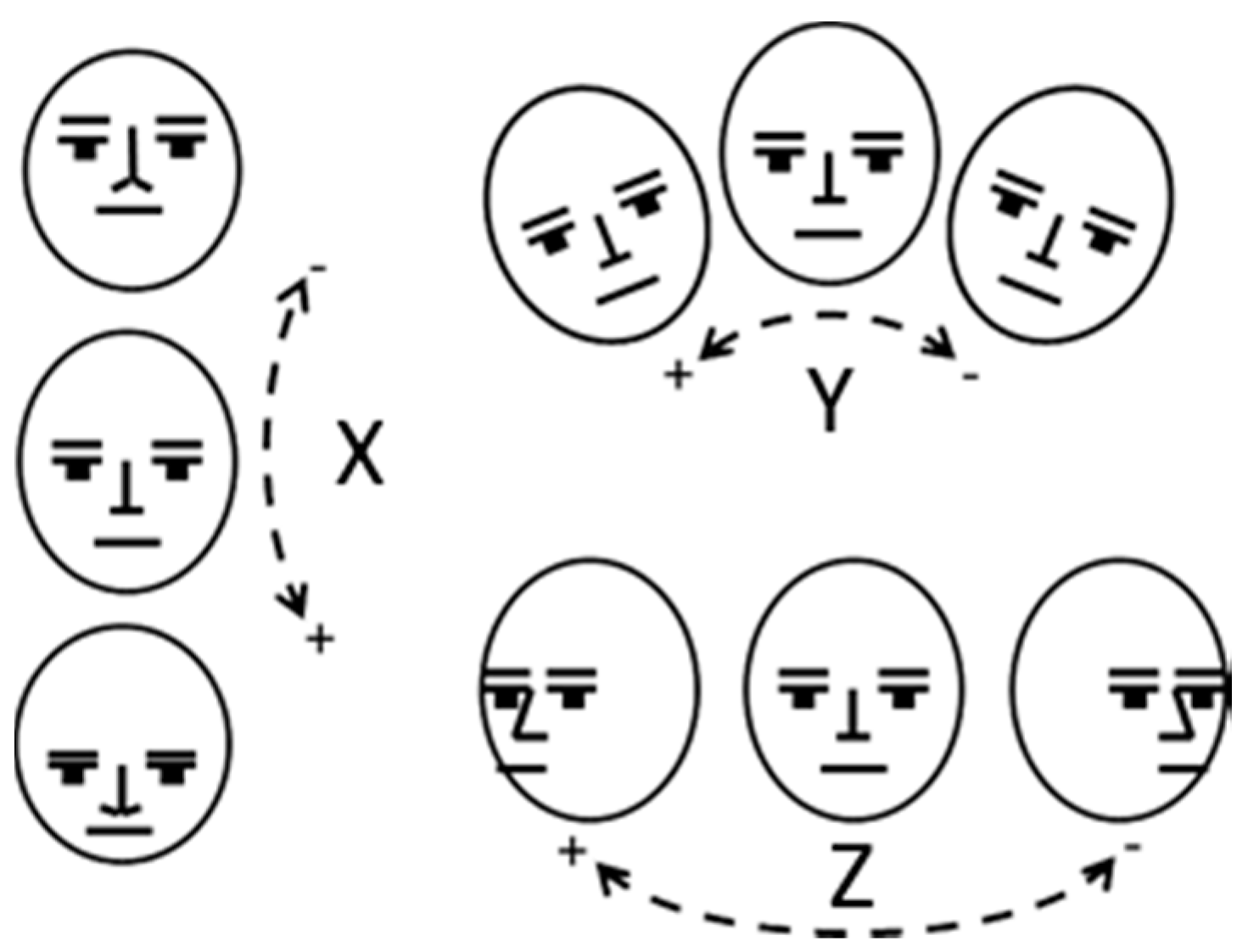
2.1.5. Coordinate System
2.1.6. Software
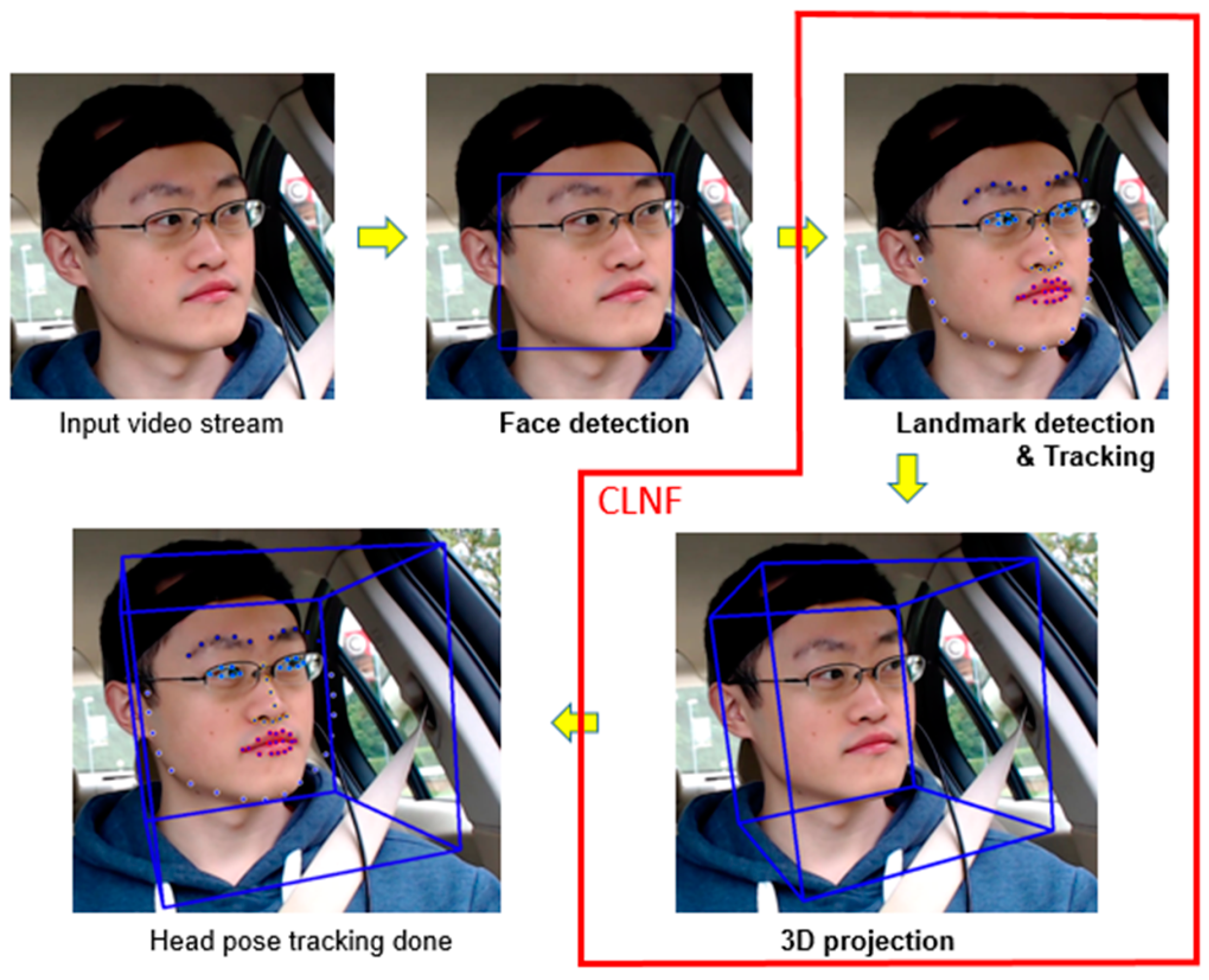
2.2. Camera-Based Head Tracking
3. Results
3.1. Accuracy Validation of a Single Device
3.2. Calibration Error between Two Devices
3.3. Indoor Testing
3.4. On-Road Testing
3.5. A NDA Case Study
4. Discussion and Conclusions
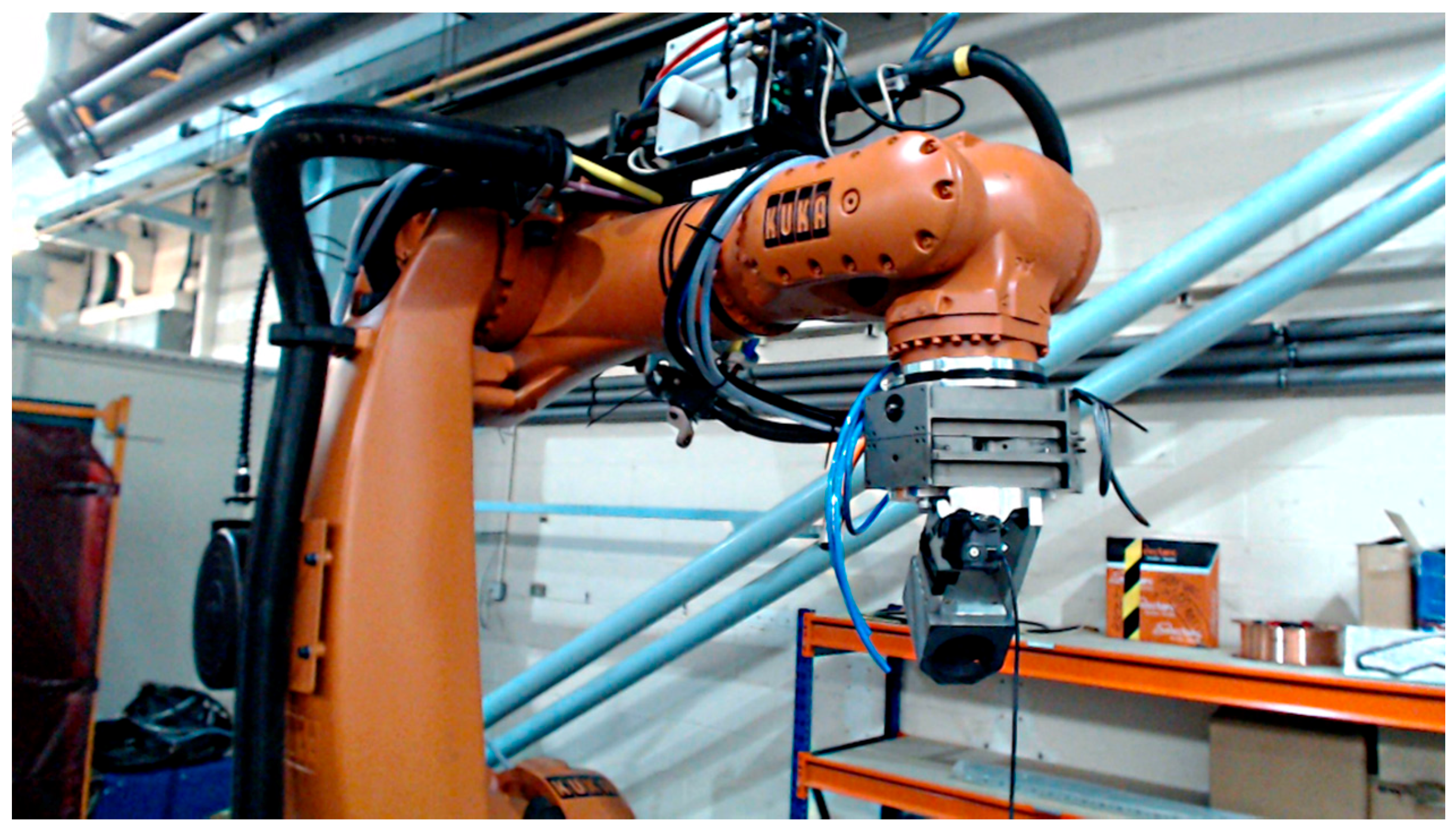
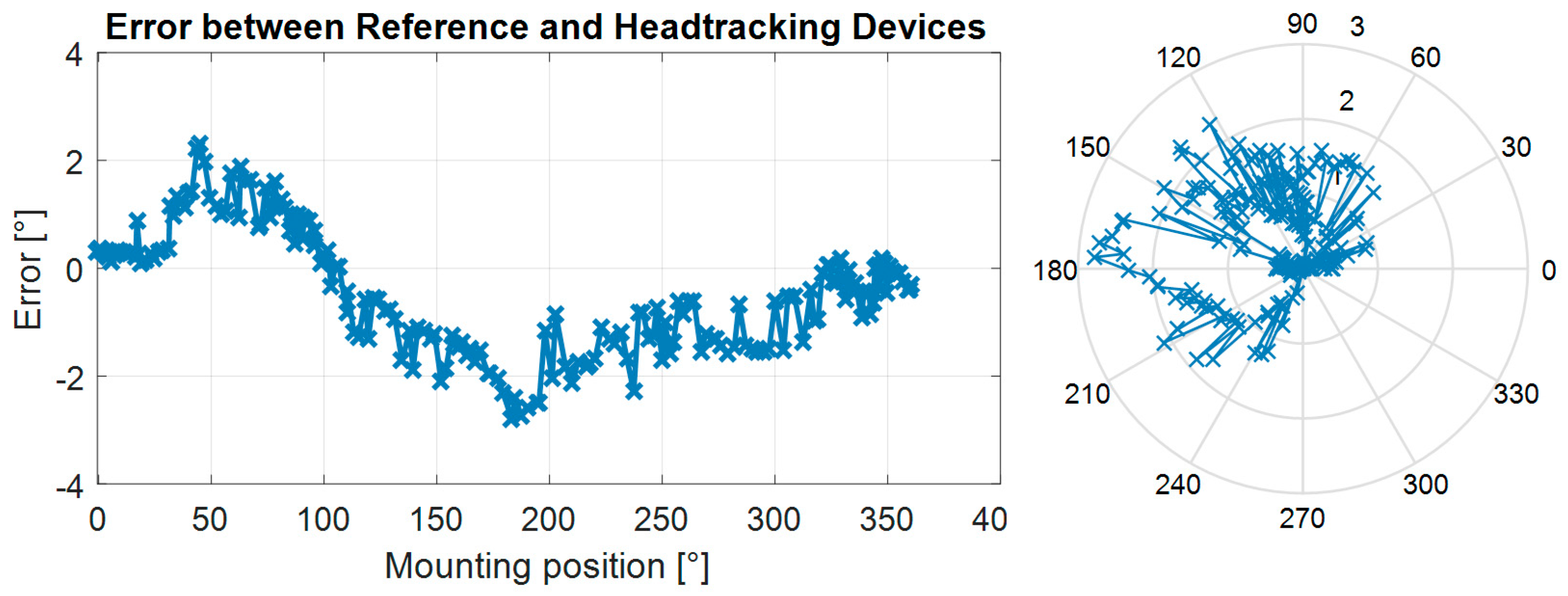
- Through a test using a robotic arm, the averaged errors for the nodding, rolling and shaking axes of a single device on a static platform were 0.36°, 1.57° and 0.38° respectively.
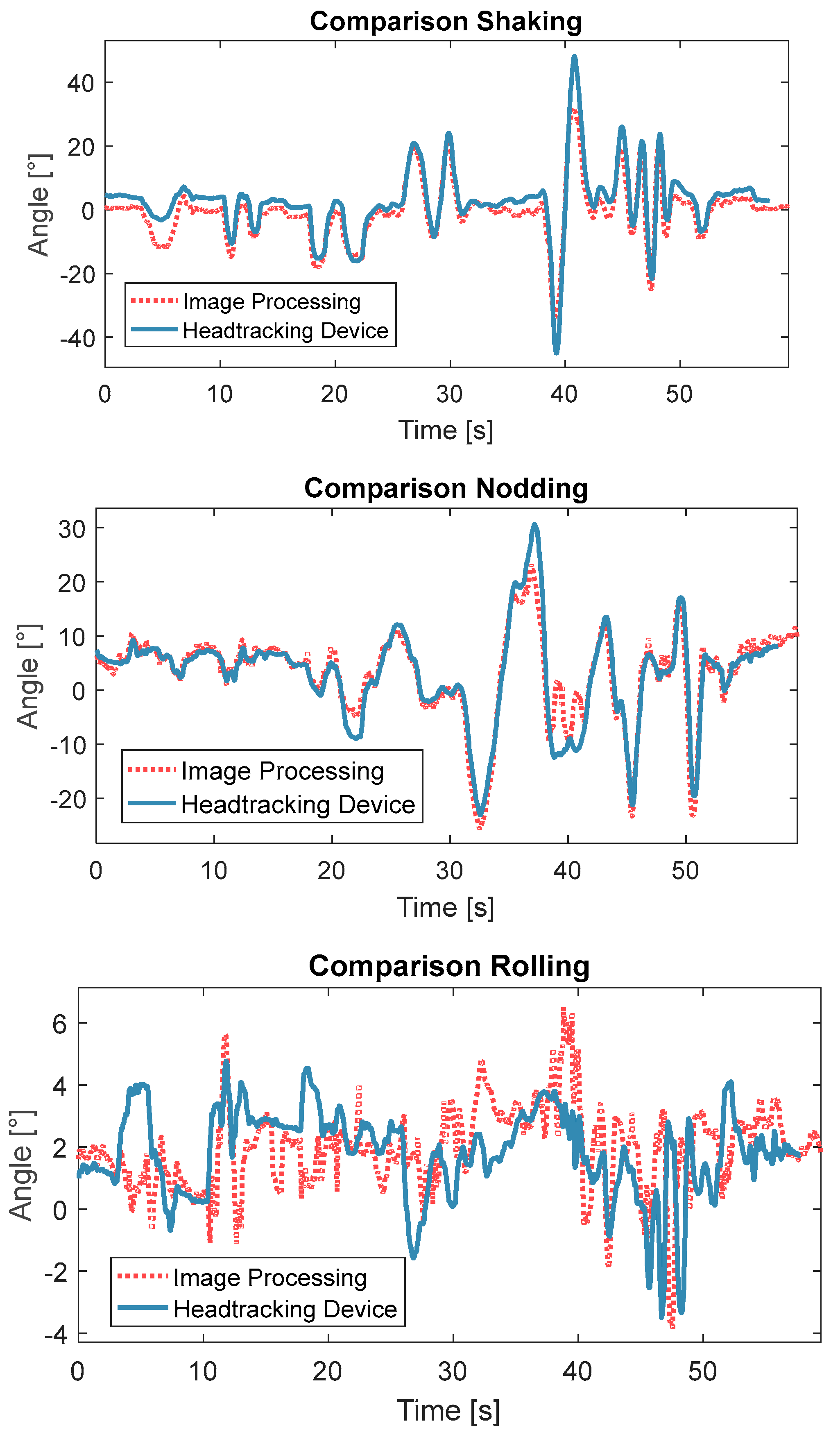
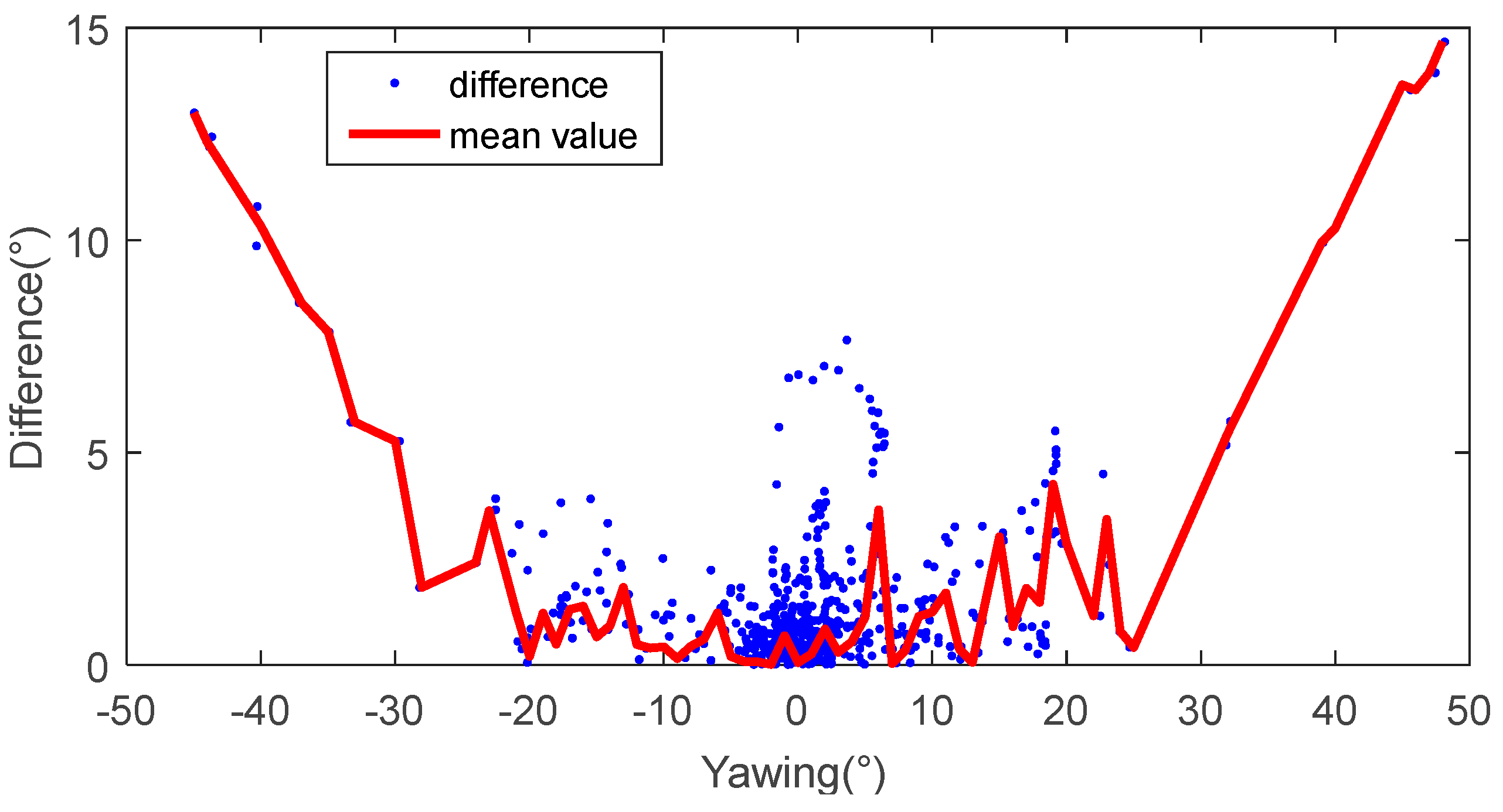
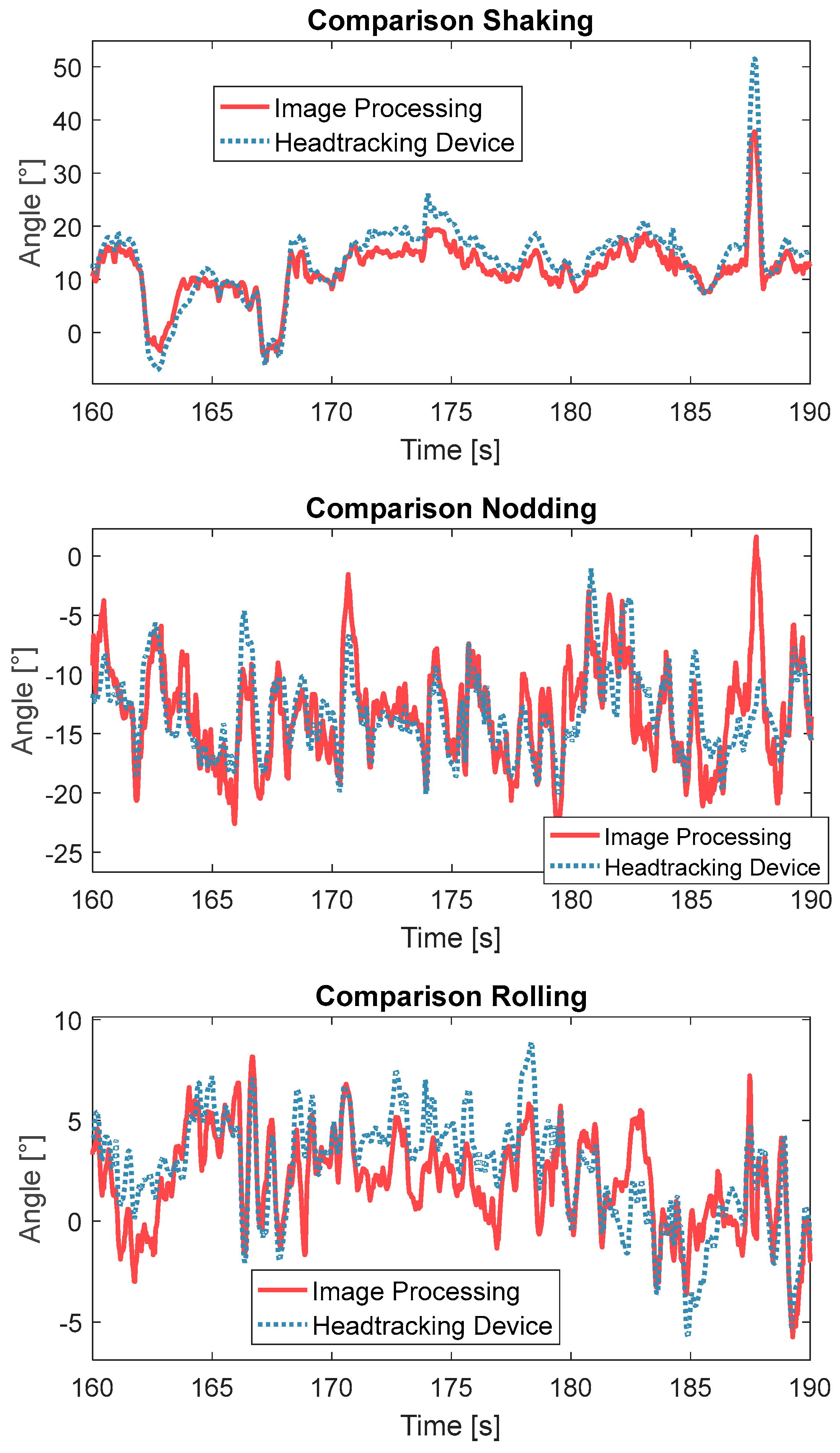
- The in-house tests showed that the measures of shaking and nodding between the two systems were very close, with an average difference of less than 2°. However, when the angles were larger than 20°, the camera-based system could not measure the movement accurately, due to a face detection failure. These observations suggest that the system developed here would be more suitable, than the camera-based system, to measure head movements during NDAs which include large movements.
- The on-road test achieved similar results to the static in-car test. The only difference was that the average difference increased to 4.9°, 3.6° and 4.3° for the nodding, rolling and shaking axes respectively due to the error from the reference device.
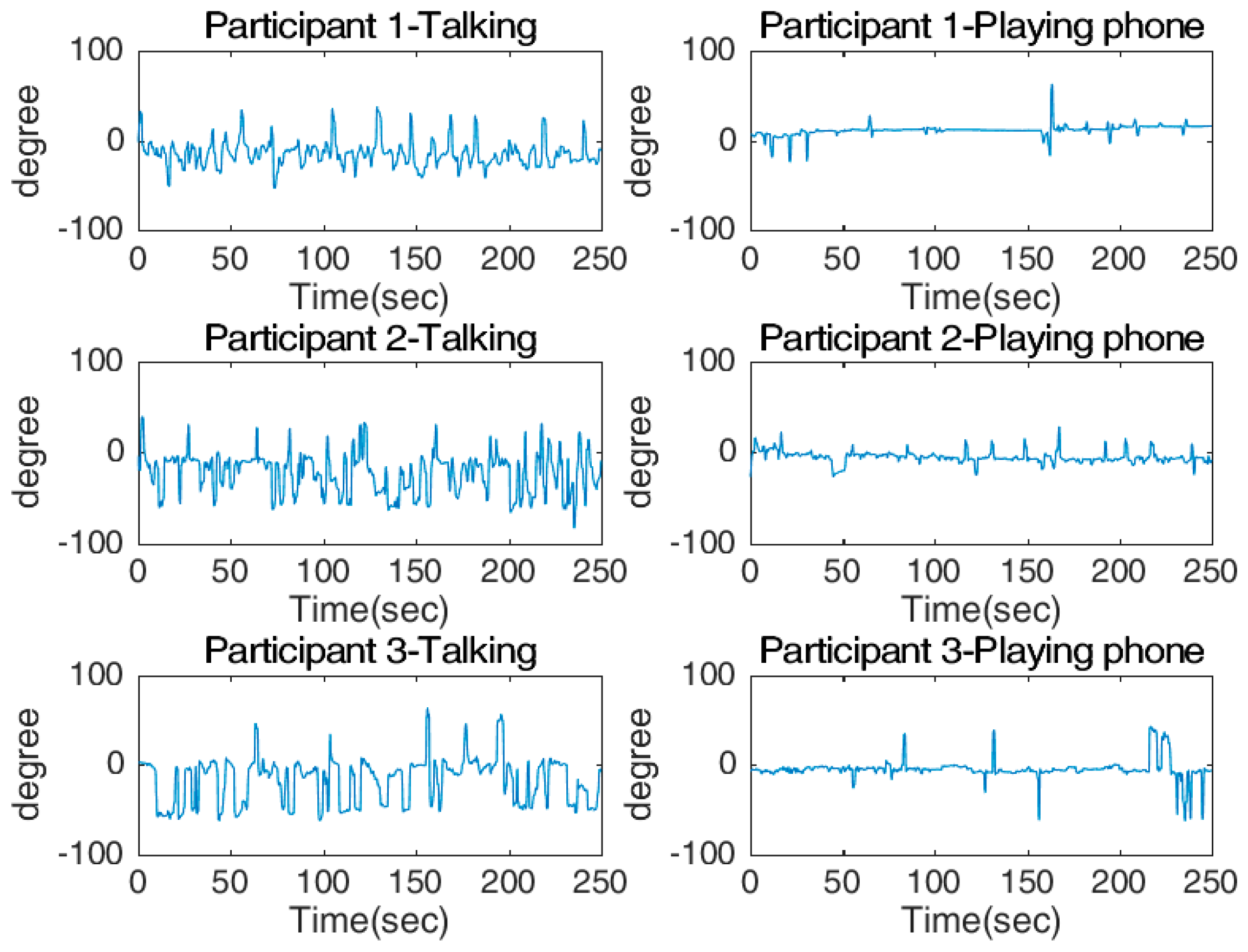
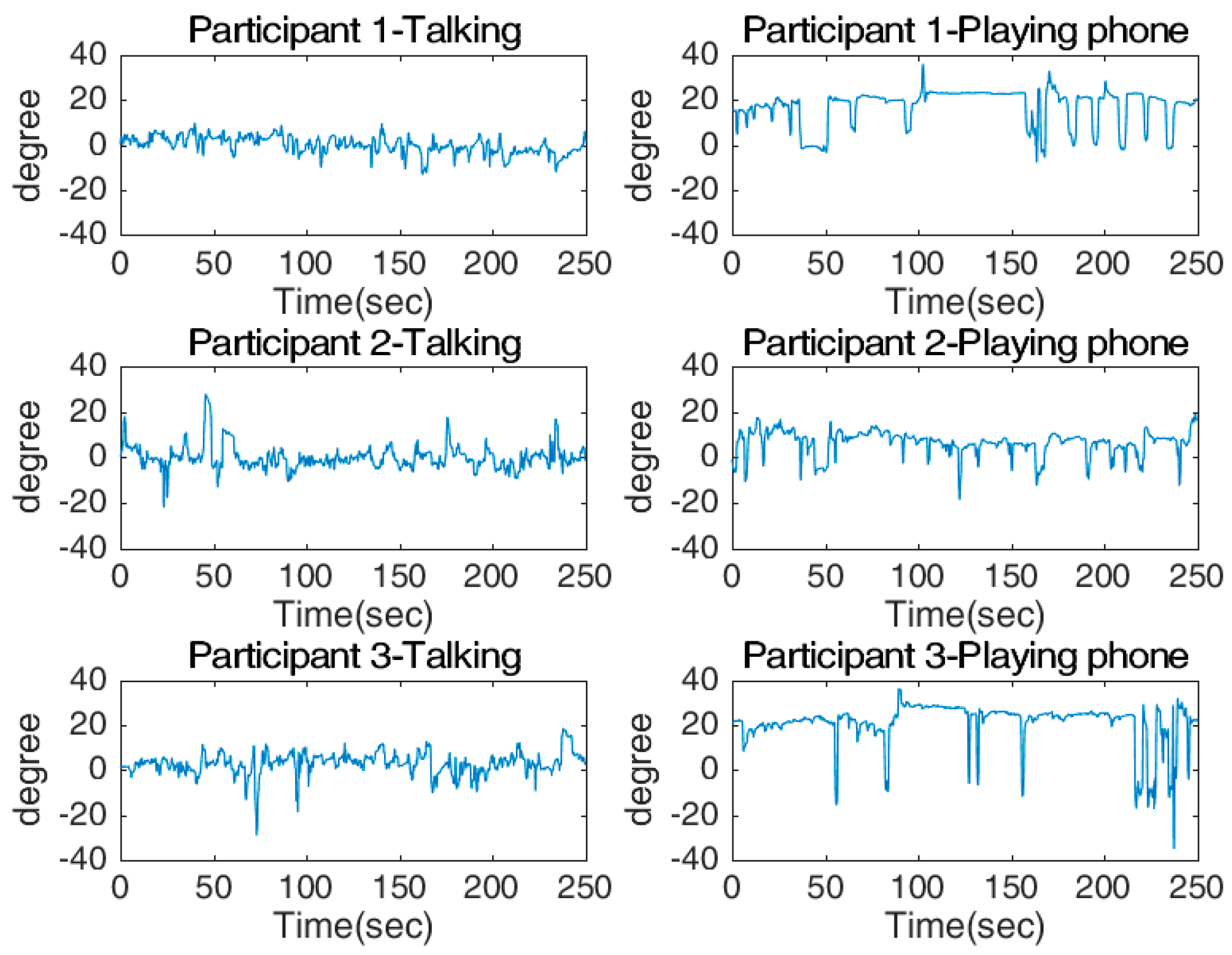
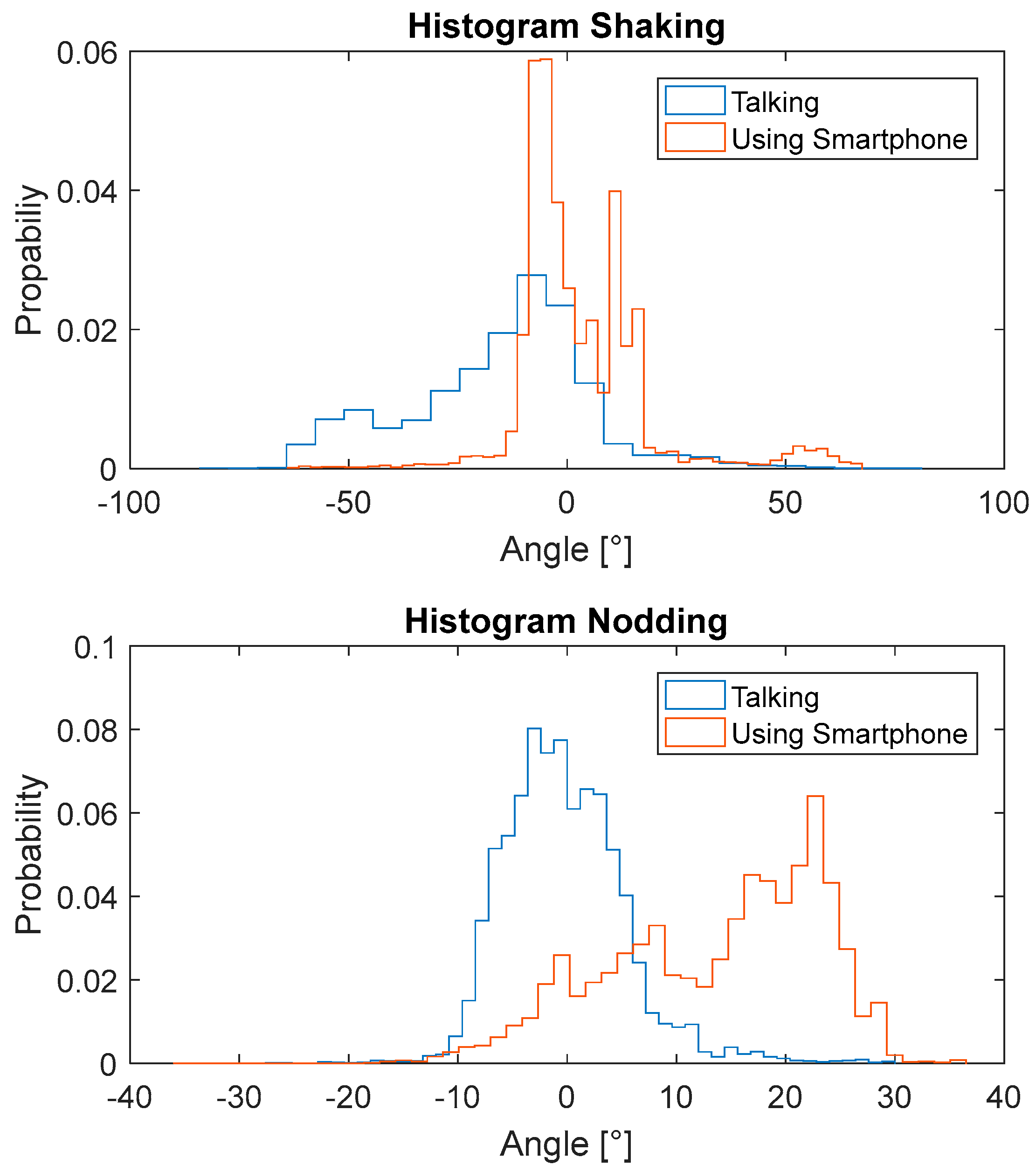
- The case study in a static vehicle demonstrates the potential of the proposed system to characterise different NDAs based on head movement, particularly with regards to the shaking and nodding axes. The rolling axes was not used in this case study because: (a) the developed device had relatively low accuracy for rolling measurement, in comparison to shaking and yawing, and (b) it has been observed that the overall rolling value was much smaller than that for shaking and yawing, which leads to a reduced sensitivity to changes in NDA.
- The single-camera based head tacking system could misinterpret 40% of time when monitoring the selected NDAs, while the proposed head tracking system successfully overcame this problem.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- SAE-International. J3016: Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems; SAE International: London, UK, 2014. [Google Scholar]
- Sivak, M.; Schoettle, B. UMTRI-2015–12: Motion Sickness in Self-Driving Vehicles; The University of Michigan Transportation Research Institute: Ann Arbor, MI, USA, 2015. [Google Scholar]
- Wang, Y.; Zhao, T.; Ding, X.; Bian, J.; Fu, X. Head pose-free eye gaze prediction for driver attention study. In Proceedings of the 2017 IEEE International Conference on Big Data and Smart Computing (BigComp), Jeju, Korea, 13–16 February 2017; pp. 42–46. [Google Scholar]
- Liu, X.; Xu, F.; Fujimura, K. Real-time eye detection and tracking for driver observation under various light conditions. In Proceedings of the Intelligent Vehicle Symposium, Versailles, France, 17–21 June 2002; Volume 2, pp. 344–351. [Google Scholar]
- Ji, Q.; Yang, X. Real-Time Eye, Gaze, and Face Pose Tracking for Monitoring Driver Vigilance. Real-Time Imaging 2002, 8, 357–377. [Google Scholar] [CrossRef]
- Smith, P.; Shah, M.; da Vitoria Lobo, N. Monitoring head/eye motion for driver alertness with one camera. In Proceedings of the 15th International Conference on Pattern Recognition, ICPR-2000, Barcelona, Spain, 3–7 September 2000; Volume 4, pp. 636–642. [Google Scholar]
- Murphy-Chutorian, E.; Trivedi, M.M. Head Pose Estimation and Augmented Reality Tracking: An Integrated System and Evaluation for Monitoring Driver Awareness. IEEE Trans. Intell. Transp. Syst. 2010, 11, 300–311. [Google Scholar] [CrossRef]
- Murphy-Chutorian, E.; Trivedi, M.M. HyHOPE: Hybrid Head Orientation and Position Estimation for vision-based driver head tracking. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 512–517. [Google Scholar]
- Simley, A. Detecting fatigued drivers with vehicle simulators. In Driver Impairment, Driver Fatigue and Driving Simulation; Hartley, L., Ed.; Taylor & Francis: London, UK, 1995; pp. 133–148. [Google Scholar]
- Trivedi, M.M.; Gandhi, T.; McCall, J. Looking-In and Looking-Out of a Vehicle: Computer-Vision-Based Enhanced Vehicle Safety. IEEE Trans. Intell. Transp. Syst. 2007, 8, 108–120. [Google Scholar] [CrossRef]
- Ba, S.O.; Odobez, J.M. Visual focus of attention estimation from head pose posterior probability distributions. In Proceedings of the 2008 IEEE International Conference on Multimedia and Expo, Hannover, Germany, 23 June–26 April 2008; pp. 53–56. [Google Scholar]
- Asteriadis, S.; Karpouzis, K.; Kollias, S. The Importance of Eye Gaze and Head Pose to Estimating Levels of Attention. In Proceedings of the 2011 Third International Conference on Games and Virtual Worlds for Serious Applications, Athens, Greece, 4–6 May 2011; pp. 186–191. [Google Scholar]
- Mbouna, R.O.; Kong, S.G.; Chun, M.-G. Visual Analysis of Eye State and Head Pose for Driver Alertness Monitoring. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1462–1469. [Google Scholar] [CrossRef]
- Cheng, S.Y.; Trivedi, M.M. Turn-Intent Analysis Using Body Pose for Intelligent Driver Assistance. IEEE Pervasive Comput. 2006, 5, 28–37. [Google Scholar] [CrossRef]
- McCall, J.C.; Trivedi, M.M.; Wipf, D.; Rao, B. Lane Change Intent Analysis Using Robust Operators and Sparse Bayesian Learning. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05)-Workshops, San Diego, CA, USA, 21–23 September 2005; Volume 3, p. 59. [Google Scholar]
- Murphy-Chutorian, E.; Trivedi, M.M. Head Pose Estimation in Computer Vision: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 607–626. [Google Scholar] [CrossRef] [PubMed]
- Yang, M.H.; Kriegman, D.J.; Ahuja, N. Detecting faces in images: A survey. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 34–58. [Google Scholar] [CrossRef]
- Ferrario, V.F.; Sforza, C.; Serrao, G.; Grassi, G.; Mossi, E. Active range of motion of the head and cervical spine: A three-dimensional investigation in healthy young adults. J. Orthop. Res. 2002, 20, 122–129. [Google Scholar] [CrossRef]
- Martin, S.; Tawari, A.; Trivedi, M.M. Monitoring head dynamics for driver assistance systems: A multi-perspective approach. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; pp. 2286–2291. [Google Scholar]
- Vlahogianni, E.I.; Barmpounakis, E.N. Driving analytics using smartphones: Algorithms, comparisons and challenges. Transp. Res. Part C Emerg. Technol. 2017, 79, 196–206. [Google Scholar] [CrossRef]
- Chakravarty, T.; Ghose, A.; Bhaumik, C.; Chowdhury, A. MobiDriveScore—A system for mobile sensor based driving analysis: A risk assessment model for improving one’s driving. In Proceedings of the 2013 Seventh International Conference on Sensing Technology (ICST), Wellington, New Zealand, 3–5 December 2013; pp. 338–344. [Google Scholar]
- Ghose, A.; Chowdhury, A.; Chandel, V.; Banerjee, T.; Chakravarty, T. An enhanced automated system for evaluating harsh driving using smartphone sensors. In Proceedings of the 17th International Conference on Distributed Computing and Networking-ICDCN’16, Singapore, 4–7 January 2016; pp. 1–6. [Google Scholar]
- Intersense. InertiaCube4. 2017. Available online: http://www.intersense.com/pages/18/234/ (accessed on 10 July 2017).
- King, D.E. Dlib-ml: A Machine Learning Toolkit. J. Mach. Learn. Res. 2009, 10, 1755–1758. [Google Scholar]
- Markuš, N.; Frljak, M.; Pandžić, I.S.; Ahlberg, J.; Forchheimer, R. Object Detection with Pixel Intensity Comparisons Organized in Decision Trees. arXiv, 2013; arXiv:1305.4537. [Google Scholar]
- Viola, P.; Jones, M.J. Robust Real-Time Face Detection. Int. J. Comput. Vis. 2004, 57, 137–154. [Google Scholar] [CrossRef]
- Baltrusaitis, T.; Robinson, P.; Morency, L.-P. Constrained Local Neural Fields for Robust Facial Landmark Detection in the Wild. In Proceedings of the 2013 IEEE International Conference on Computer Vision Workshops, Sydney, Australia, 1–8 December 2013; pp. 354–361. [Google Scholar]
- Baltrusaitis, T.; Robinson, P.; Morency, L.-P. OpenFace: An open source facial behavior analysis toolkit. In Proceedings of the 2016 IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Placid, NY, USA, 7–10 March 2016; pp. 1–10. [Google Scholar]
- Cristinacce, D.; Cootes, T.F. Feature Detection and Tracking with Constrained Local Models. In Proceedings of the British Machine Vision Conference 2006, Edinburgh, UK, 4–7 September 2006; pp. 1–10. [Google Scholar]
- Baltrusaitis, T.; Robinson, P.; Morency, L. 3D Constrained Local Model for rigid and non-rigid facial tracking. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 2610–2617. [Google Scholar]
- Bussone, W.R. Linear and Angular Head Accelerations in Daily Life. Master’s Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2005. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| X (°) | Y (°) | Z (°) | |
|---|---|---|---|
| Average Error | 0.36 | 1.57 | 0.38 |
| Standard Deviation | 0.13 | 0.68 | 0.23 |
| Maximal Error | 0.55 | 2.09 | 0.63 |
| Axis | On-Road Tests (°) | In-House Tests (°) |
|---|---|---|
| Shaking | 4.9 | 2.0 |
| Rolling | 3.6 | 1.3 |
| Nodding | 4.3 | 1.9 |
| Axis | Chatting | Playing Phone |
|---|---|---|
| Shaking | 44.61% | 0.93% |
| Nodding | 4.74% | 42.57% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Görne, L.; Yuen, I.-M.; Cao, D.; Sullman, M.; Auger, D.; Lv, C.; Wang, H.; Matthias, R.; Skrypchuk, L.; et al. An Orientation Sensor-Based Head Tracking System for Driver Behaviour Monitoring. Sensors 2017, 17, 2692. https://doi.org/10.3390/s17112692
Zhao Y, Görne L, Yuen I-M, Cao D, Sullman M, Auger D, Lv C, Wang H, Matthias R, Skrypchuk L, et al. An Orientation Sensor-Based Head Tracking System for Driver Behaviour Monitoring. Sensors. 2017; 17(11):2692. https://doi.org/10.3390/s17112692
Chicago/Turabian StyleZhao, Yifan, Lorenz Görne, Iek-Man Yuen, Dongpu Cao, Mark Sullman, Daniel Auger, Chen Lv, Huaji Wang, Rebecca Matthias, Lee Skrypchuk, and et al. 2017. "An Orientation Sensor-Based Head Tracking System for Driver Behaviour Monitoring" Sensors 17, no. 11: 2692. https://doi.org/10.3390/s17112692
APA StyleZhao, Y., Görne, L., Yuen, I.-M., Cao, D., Sullman, M., Auger, D., Lv, C., Wang, H., Matthias, R., Skrypchuk, L., & Mouzakitis, A. (2017). An Orientation Sensor-Based Head Tracking System for Driver Behaviour Monitoring. Sensors, 17(11), 2692. https://doi.org/10.3390/s17112692