Turning and Radius Deviation Correction for a Hexapod Walking Robot Based on an Ant-Inspired Sensory Strategy


Abstract
:1. Introduction
2. Methods
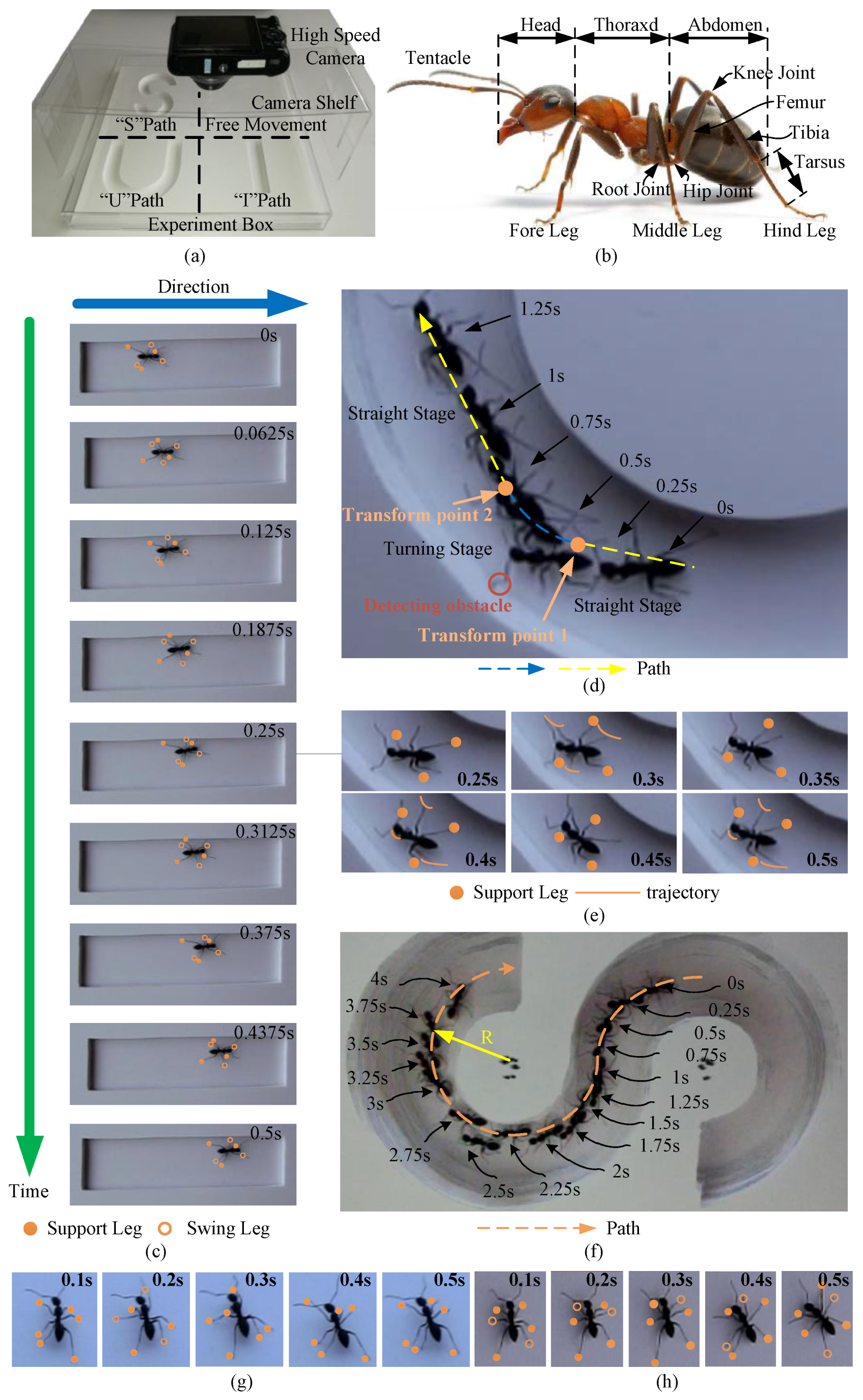
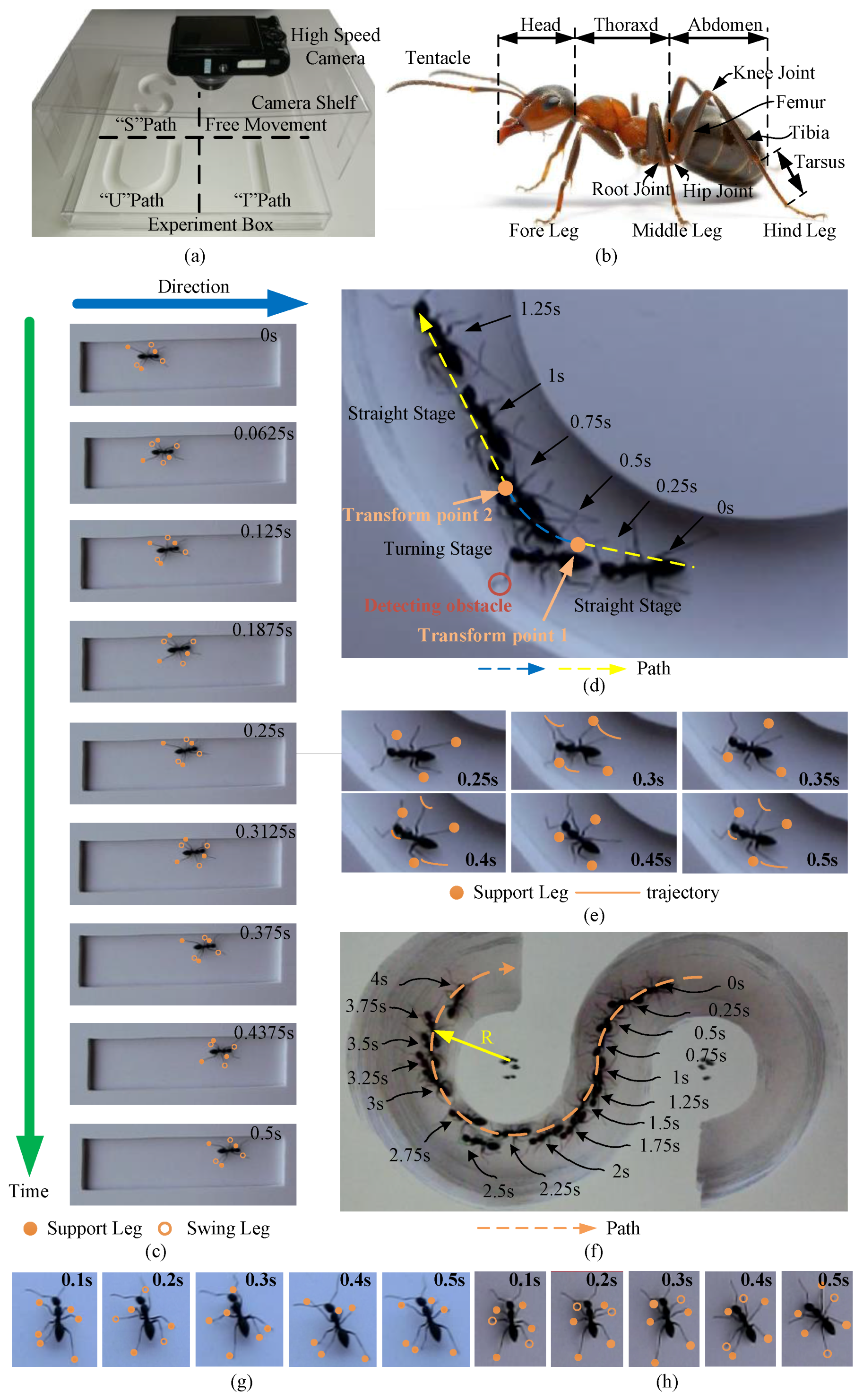
2.1. Locomotion of Ant and Bio-Inspiration
2.1.1. ‘I’ Path for Straight Gait
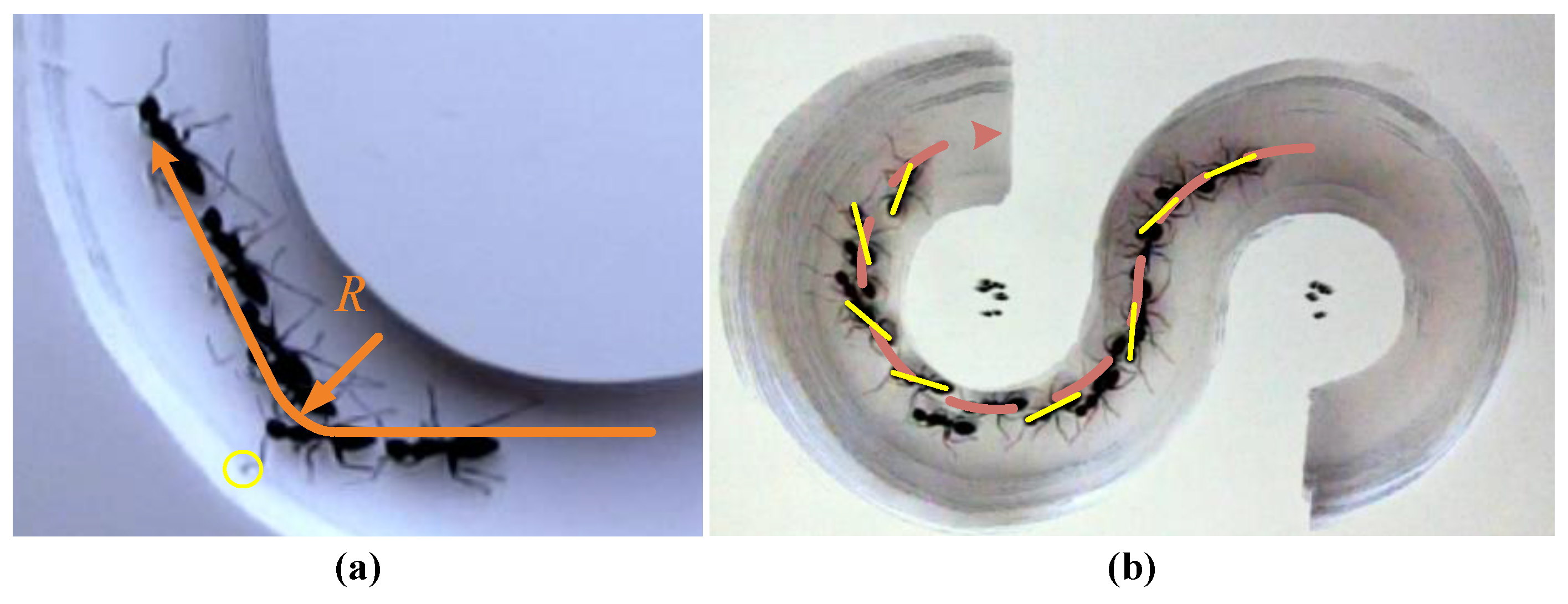
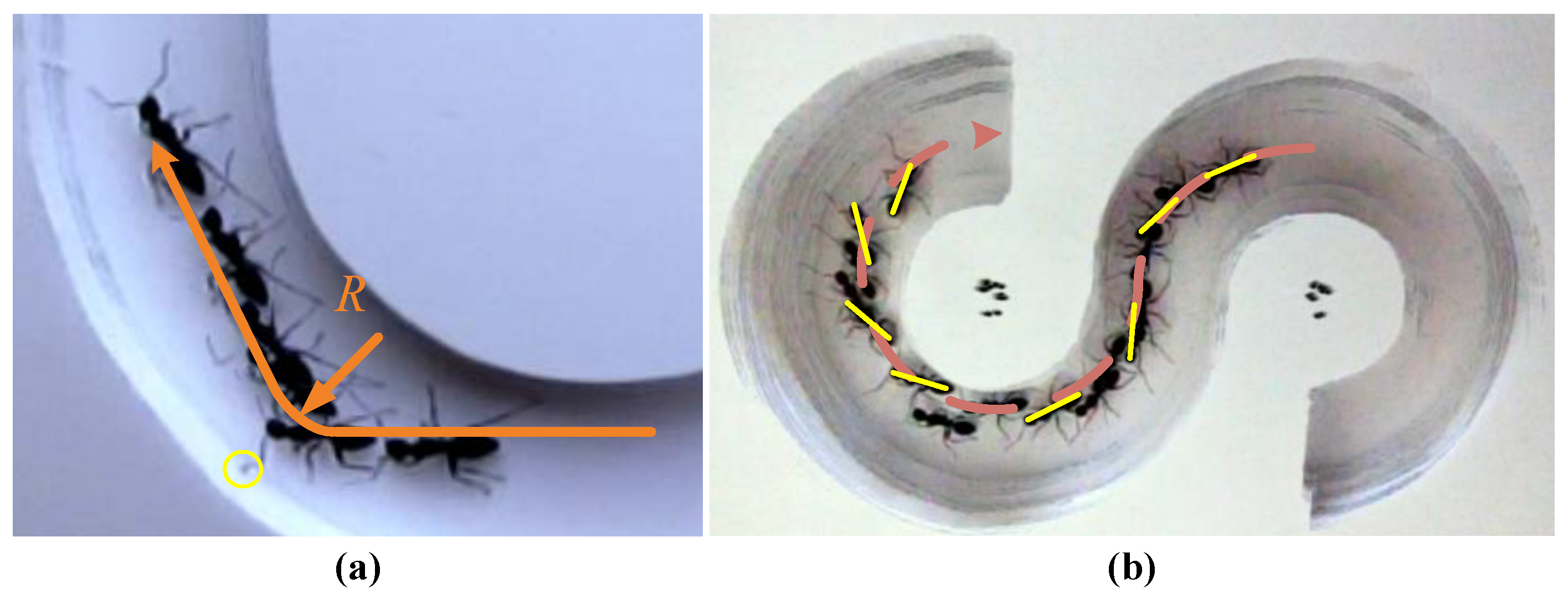
2.1.2. ‘U’ Path for Switching between Straight and Turning
2.1.3. ‘S’ Path for Always Turning and Switching Direction of Turn
2.1.4. Free Movement
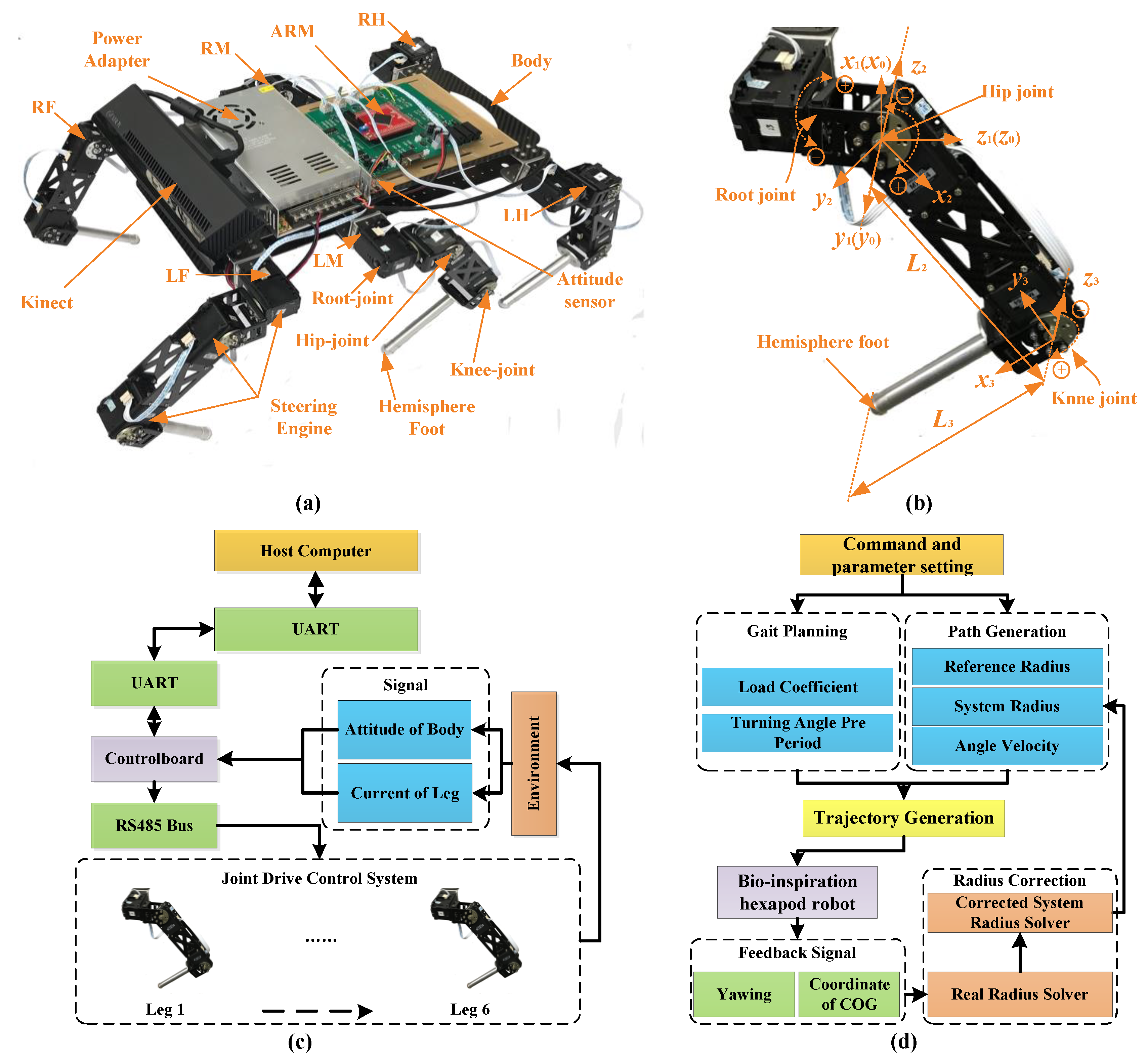
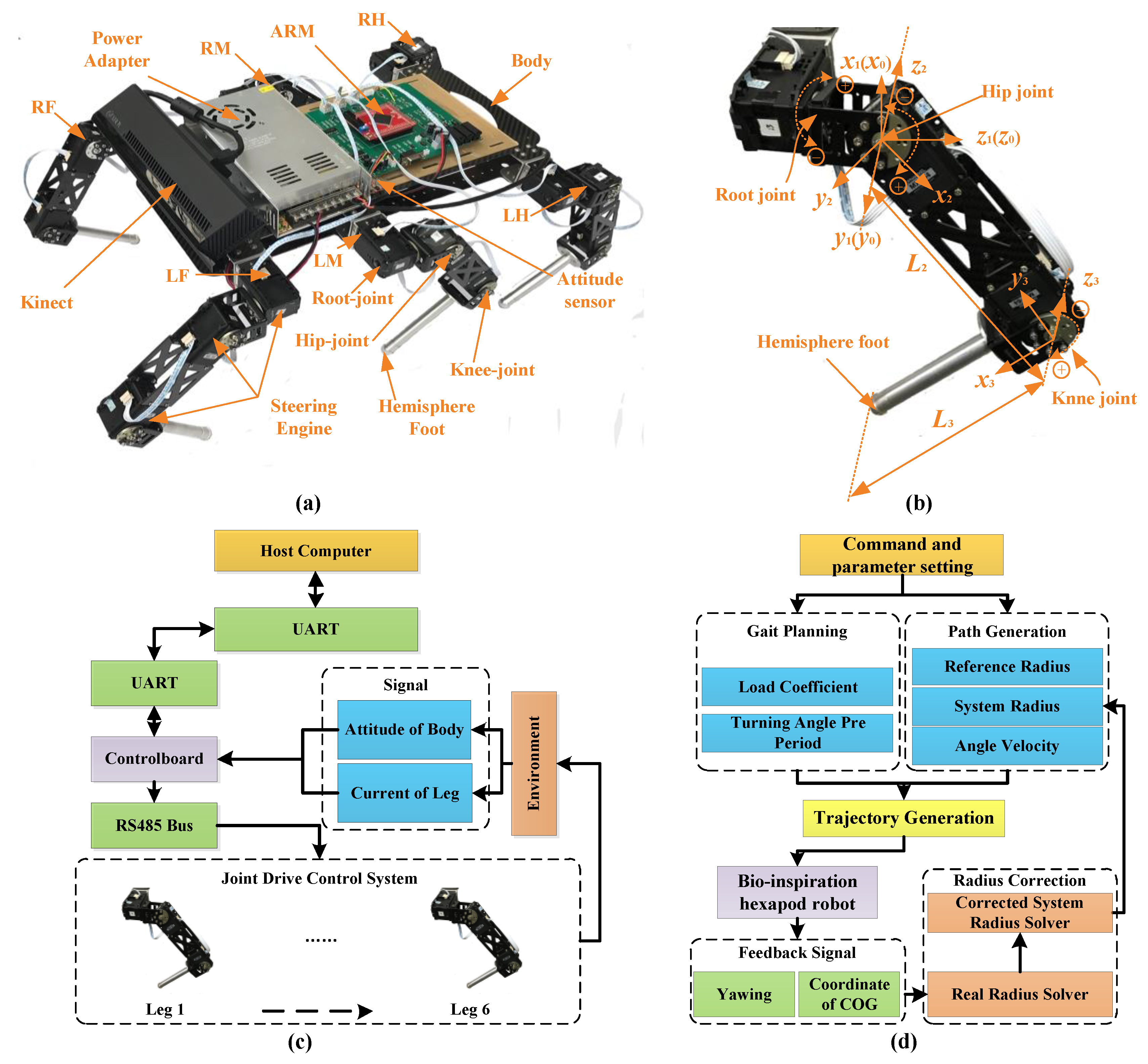
2.2. Material and Platform
2.3. Extended Turning Strategy
| Algorithm 1: Extended turning algorithm. |
| Initialize: the length of thigh L1, the length of shank L2, gait coefficient β, radius of turning R, angle velocity ω, Flagchange = 0, Flagswing = 0. |
| Initial movement form: |
| (1) Movement form change detection |
| If (Flagchange = 1) |
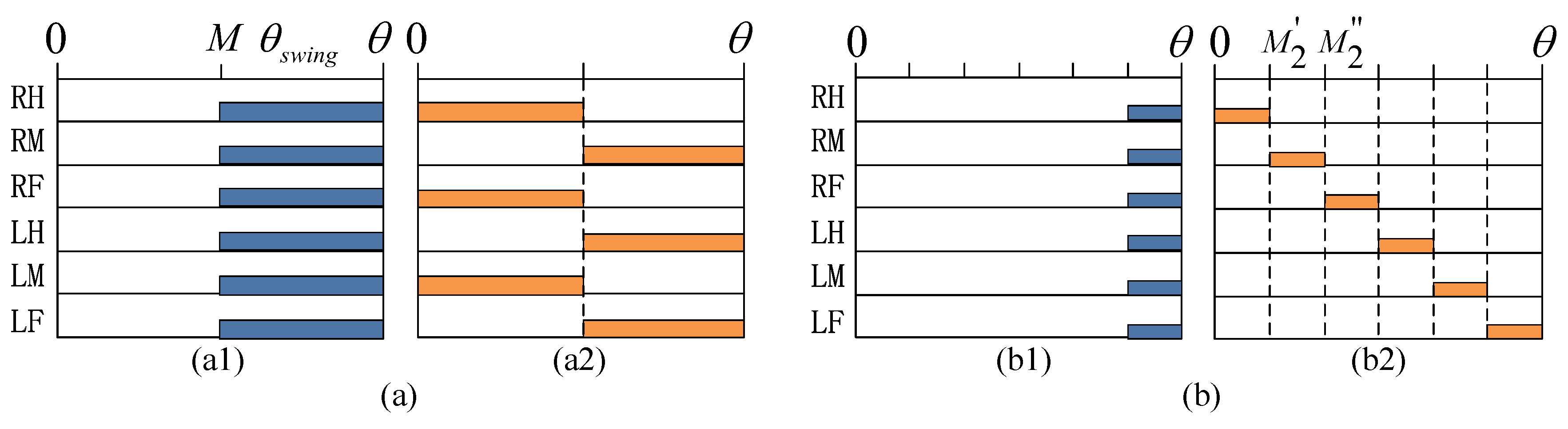
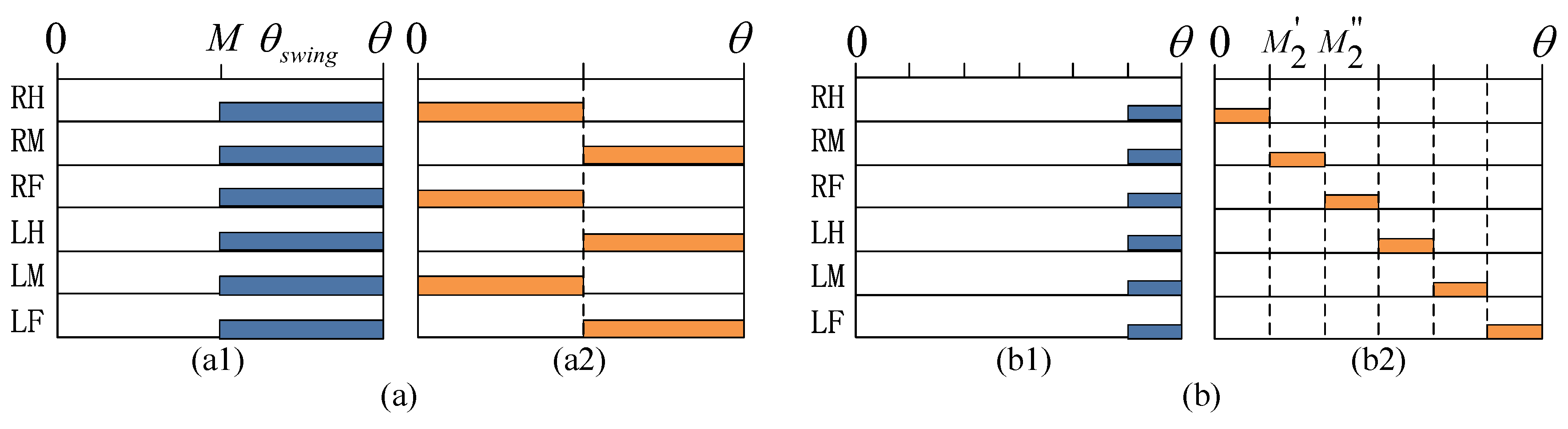
| (2) Calculating the maximum turning angle in one gait cycle θmax |
| (3) Planning the gait of robot. Generating start angle Mi’ and end angle Mi’’ in swing phase of each leg |
| (4) Generating the trajectory function of foot tip based on quartic polynomial |
| (5) Generating the control signal of each joint according to inverse kinematics |
| (6) Leg state detection |
| If (Flagswing = 1) |
| (7) Change the corresponding parameters of the leg |
| else |
| (8) Jump to (6) |
| end |
| else |
| Repeat the initial movement form and jump to (1) |
| end |
| Until: The change of parameters is completed and new movement is formed. |
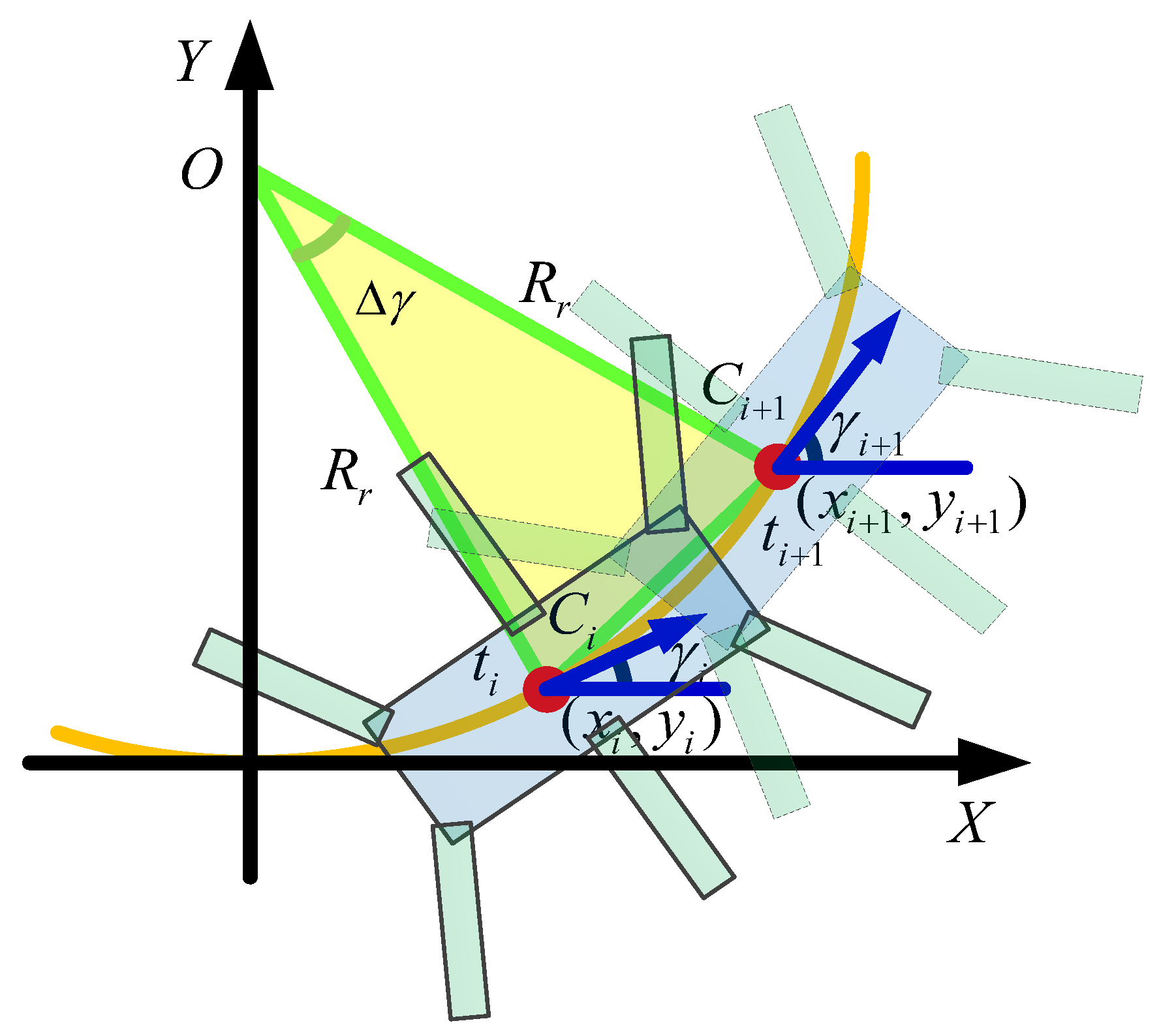
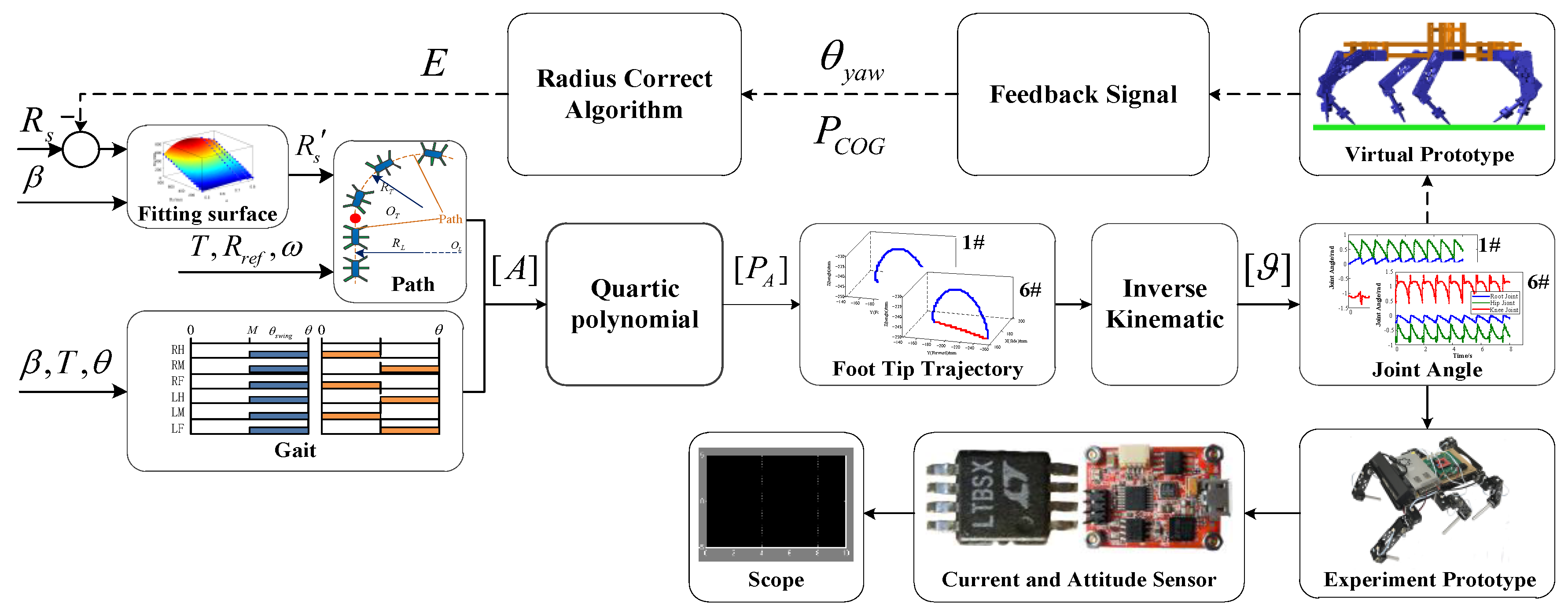
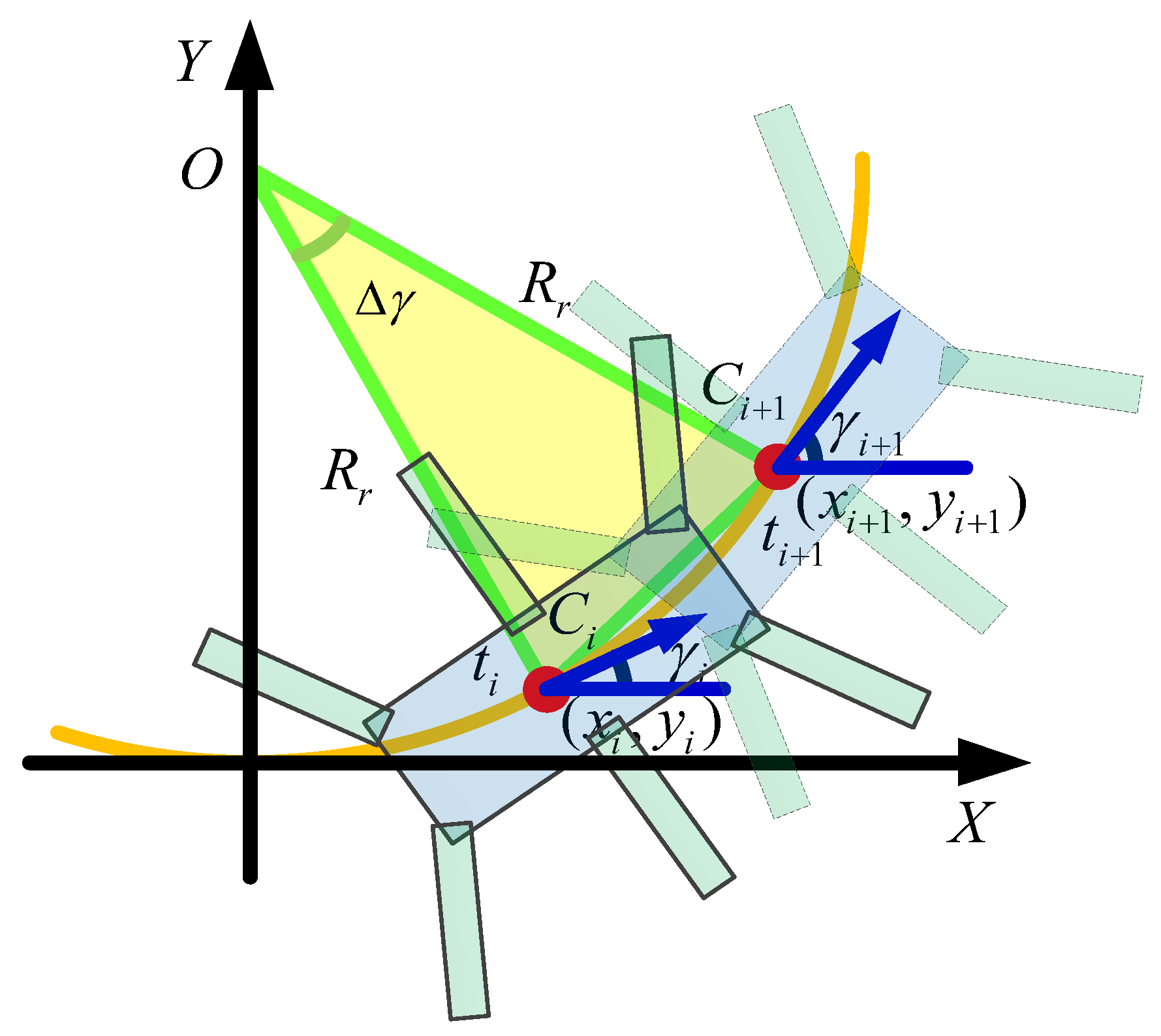
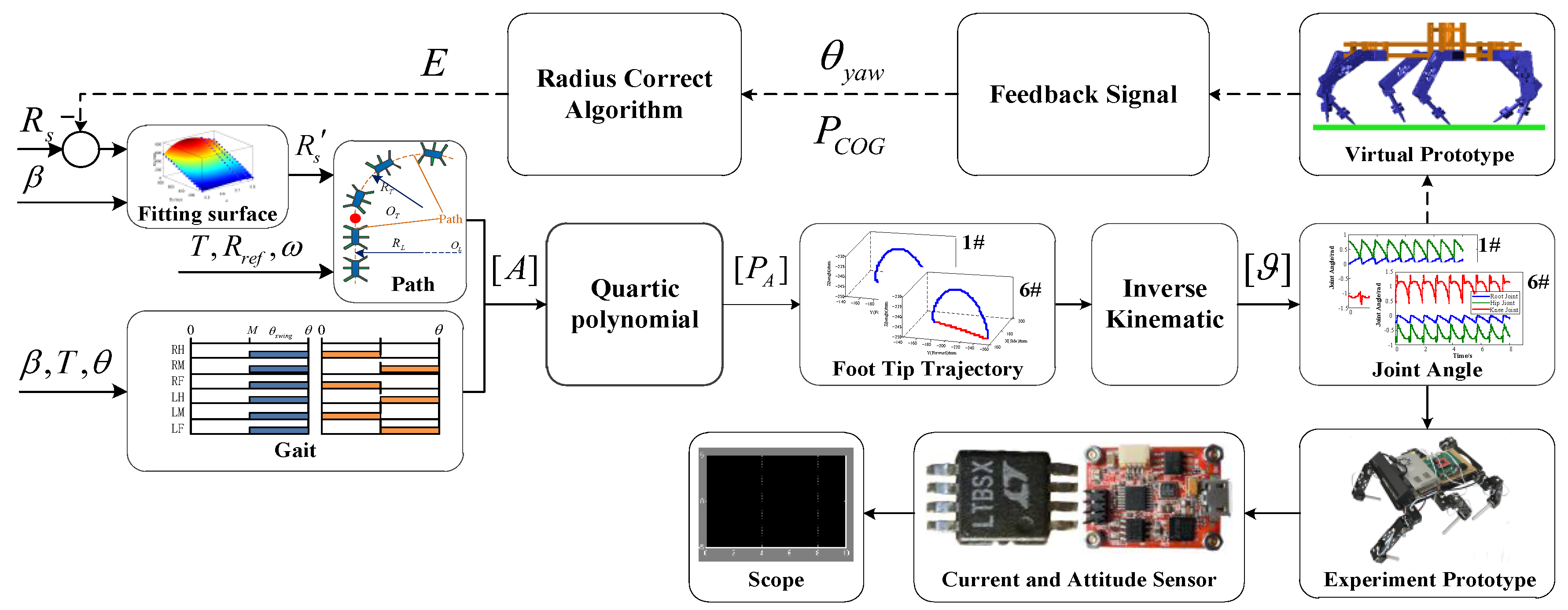
2.4. Radius Correction Algorithm
| Algorithm 2: Radius correction algorithm. |
| Initialize: coordinate of COG P; yaw angle γ; reference radius Rref; and system radius Rs: Rref = Rs; sample period T; duty factor β; minimum duty factor βmin; maximum duty factor βmin; minimum reference radius Rref,min; maximum reference radius Rref,max; |
| for (β = βmin; β < βmax; β++) |
| for (Rref = Rref,min; Rref < Rref,max; Rref++) |
| Repeat: |
| (1) Input Rs and β |
| (2) when ith sample period , collect feedback signals Pi and γi |
| (3) when (i+1)th sample period, collect feedback signals Pi+1 and γi+1 |
| (4) Calculate real radius in ith correction period |
| (5) Input to the system radius corrector and output corrected system radius |
| (6) Replace the system radius with the corrected system radius |
| Until: The radius error are eliminated and record the system radius under the Rref and β of this cycle |
| end |
| end |
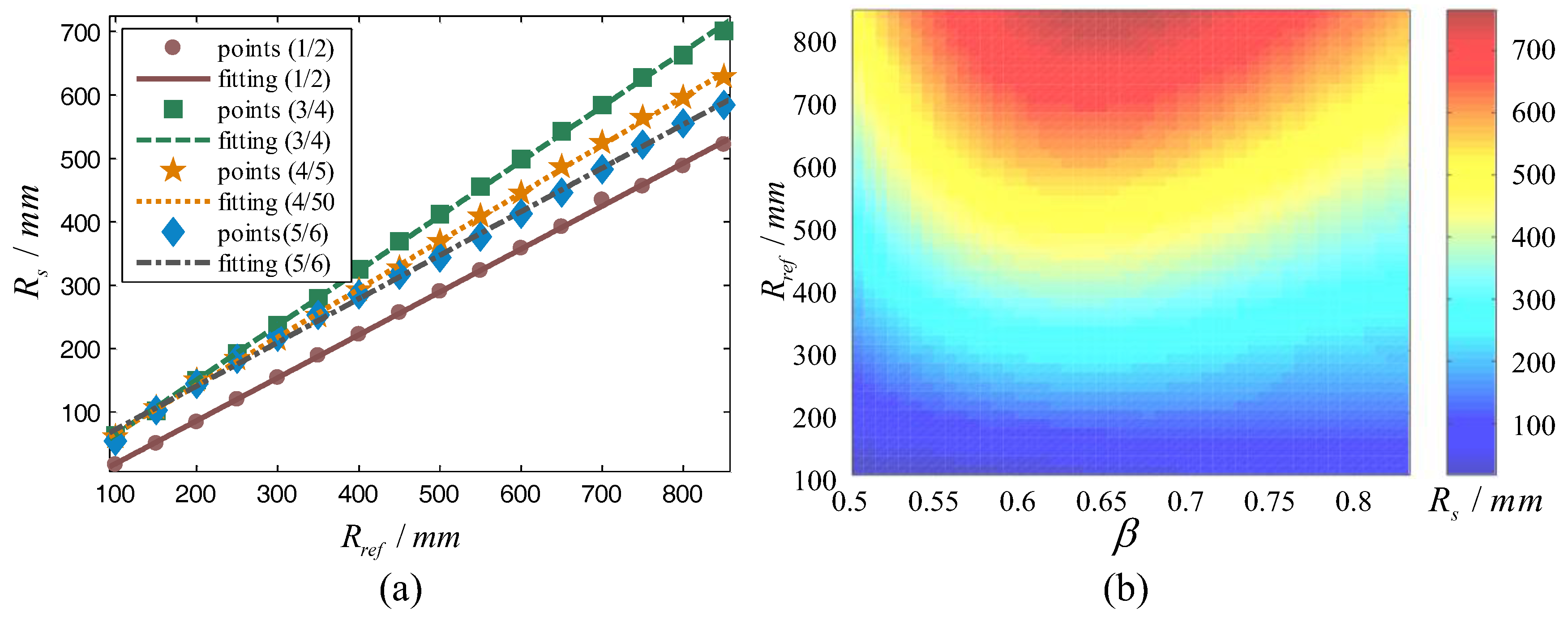
| (8) Fitting the under different Rref and β, the radius correction surface equation is obtained |
| Result: The radius correction surface equation can correct radius error directly. |
3. Simulations
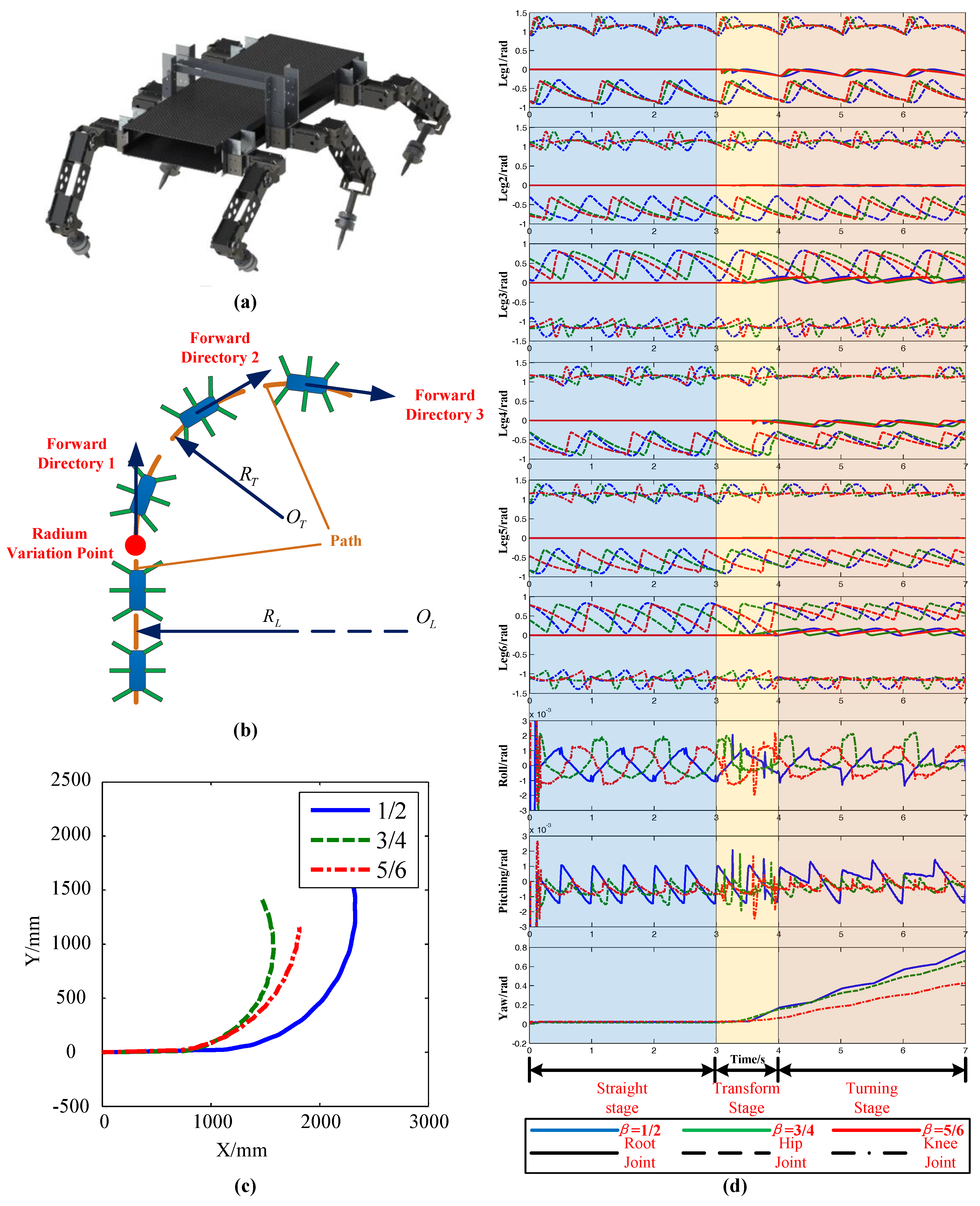
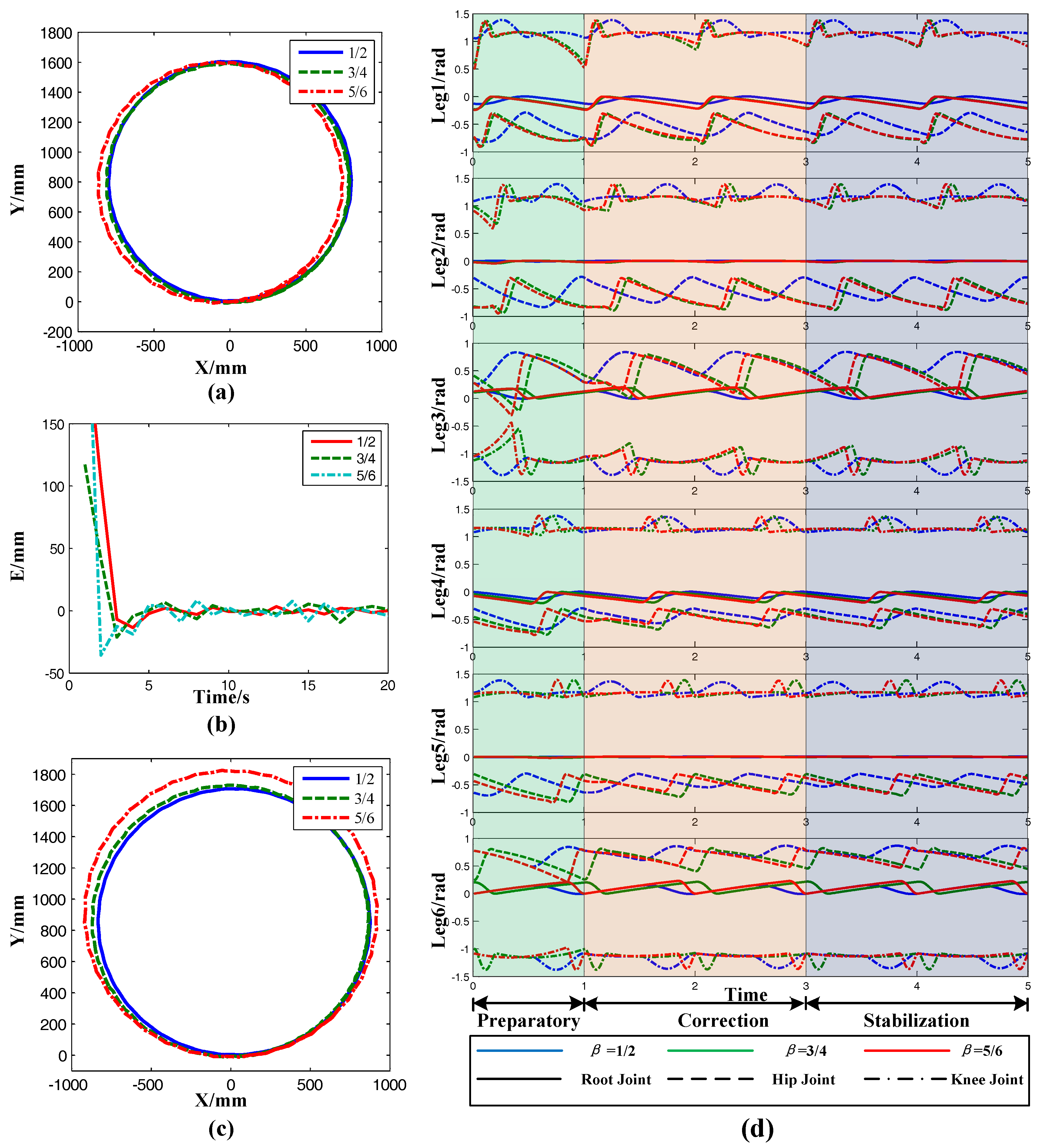
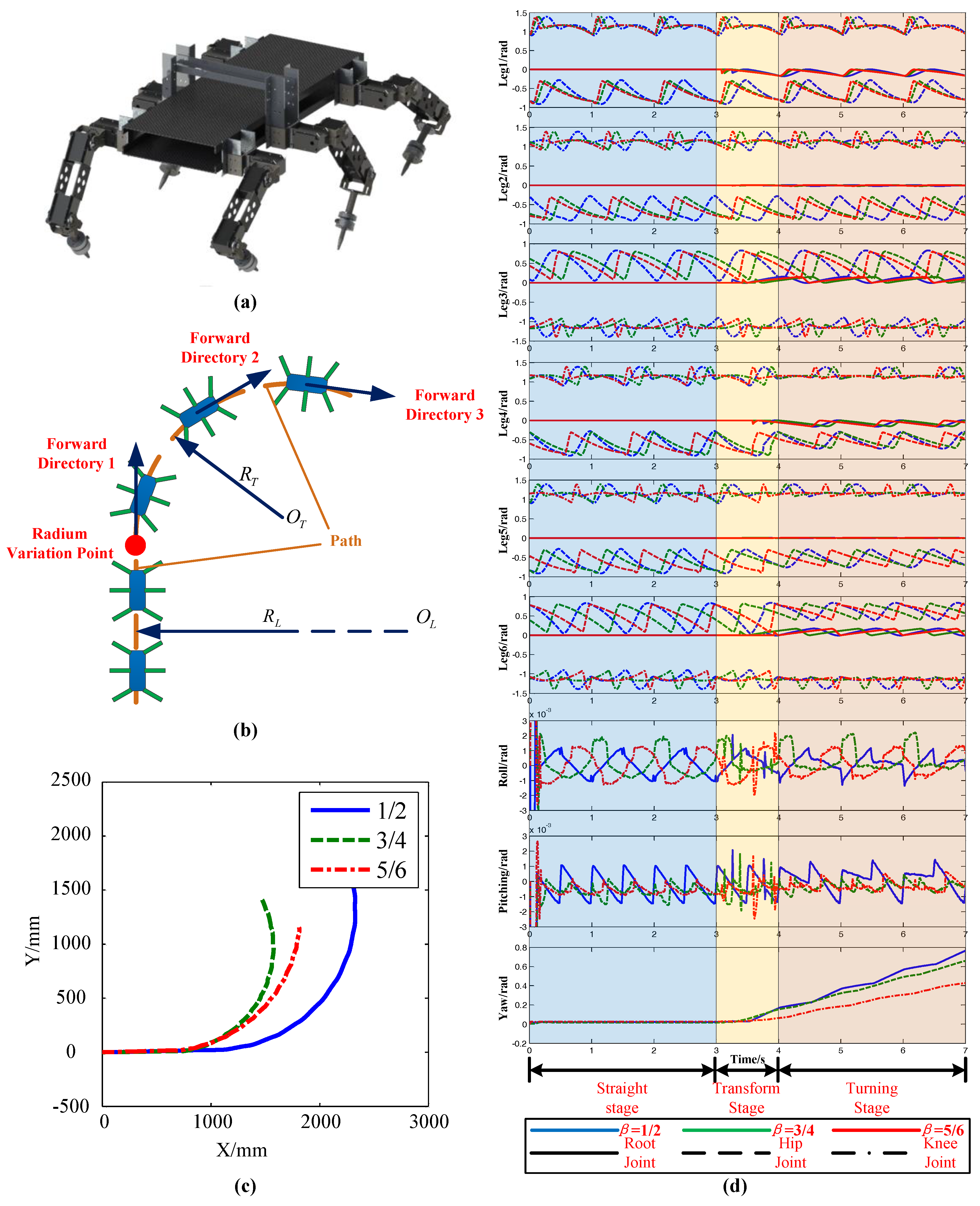
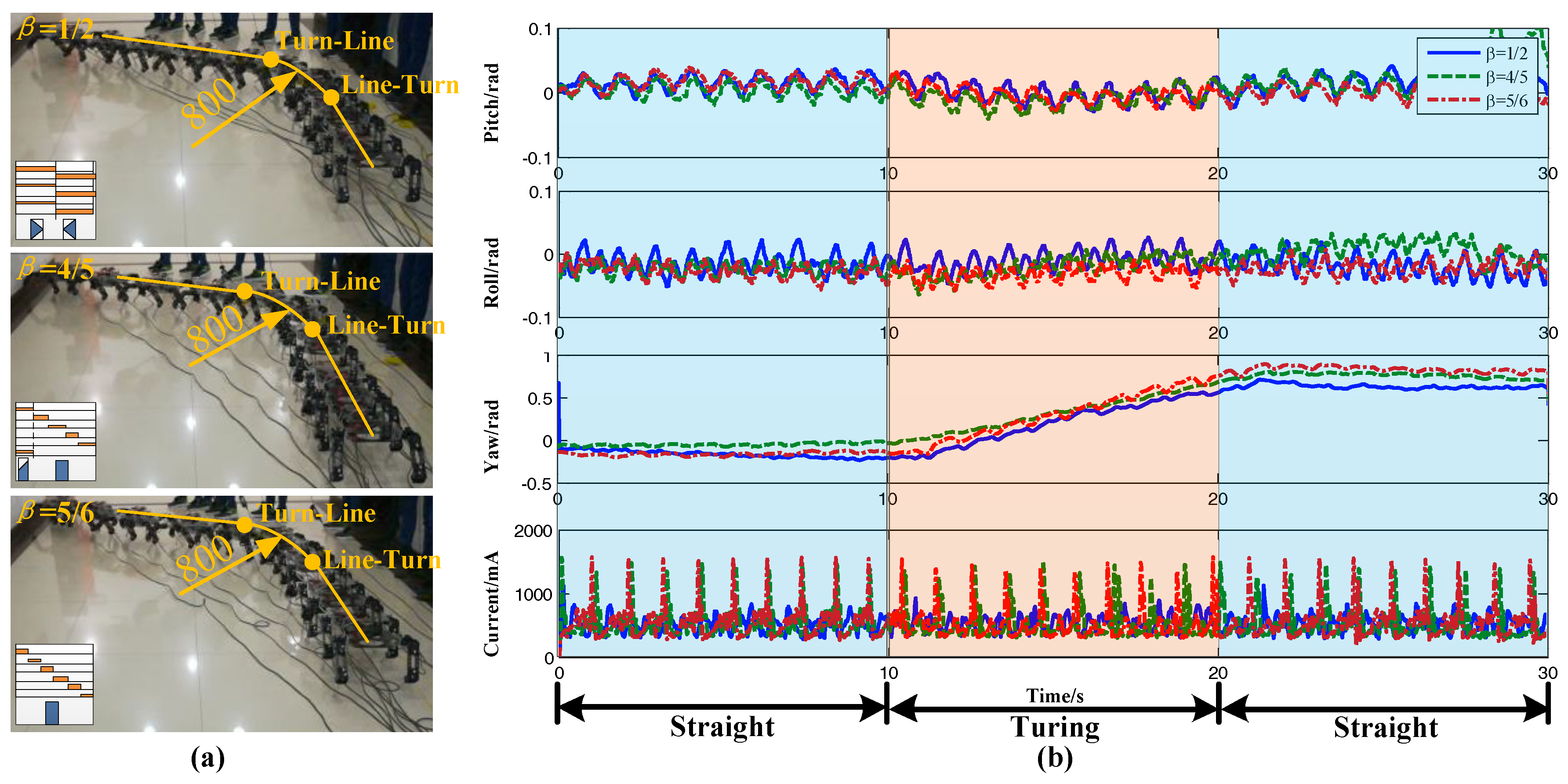
3.1. Straight-Turning Transition Simulation
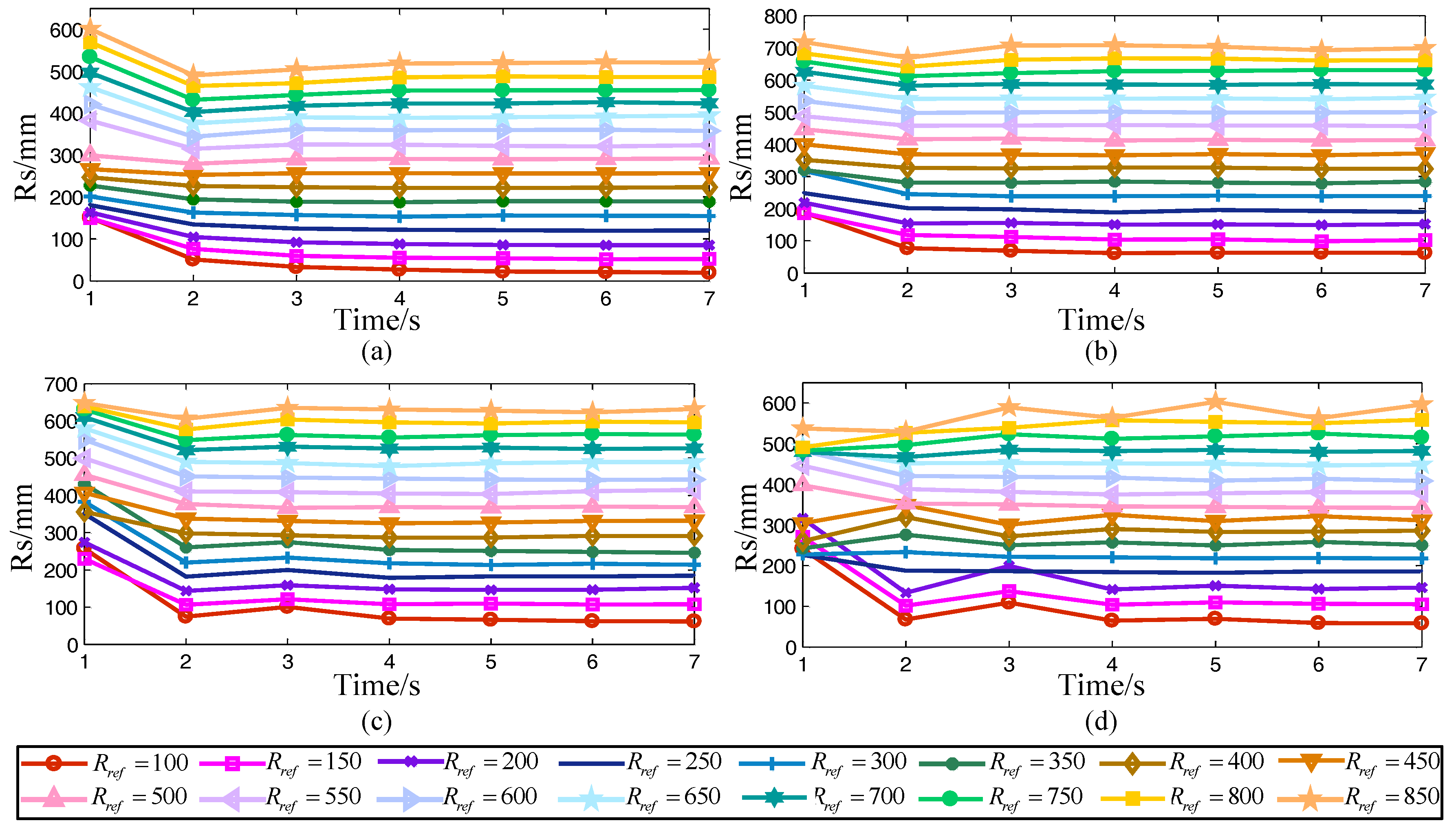
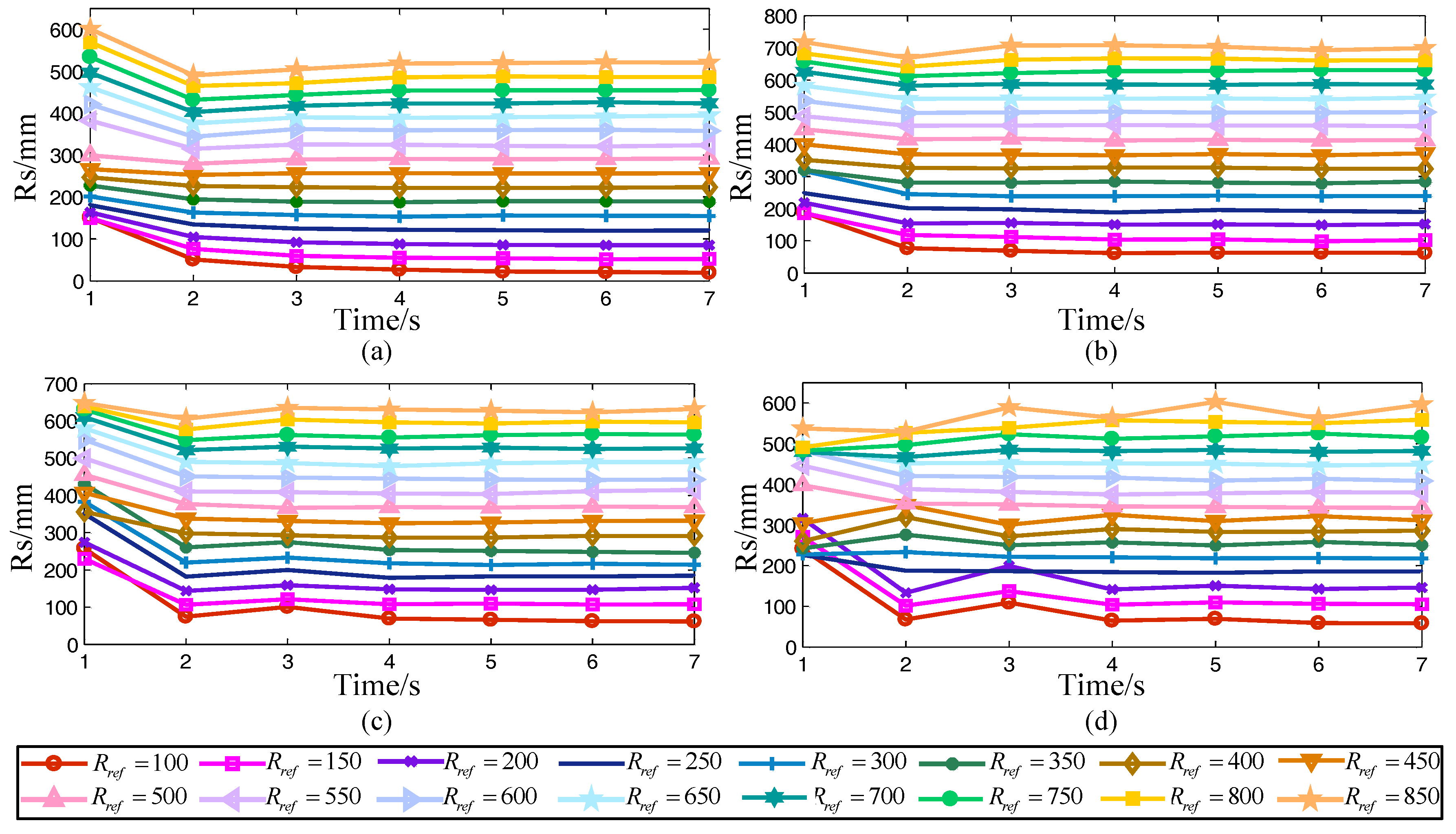
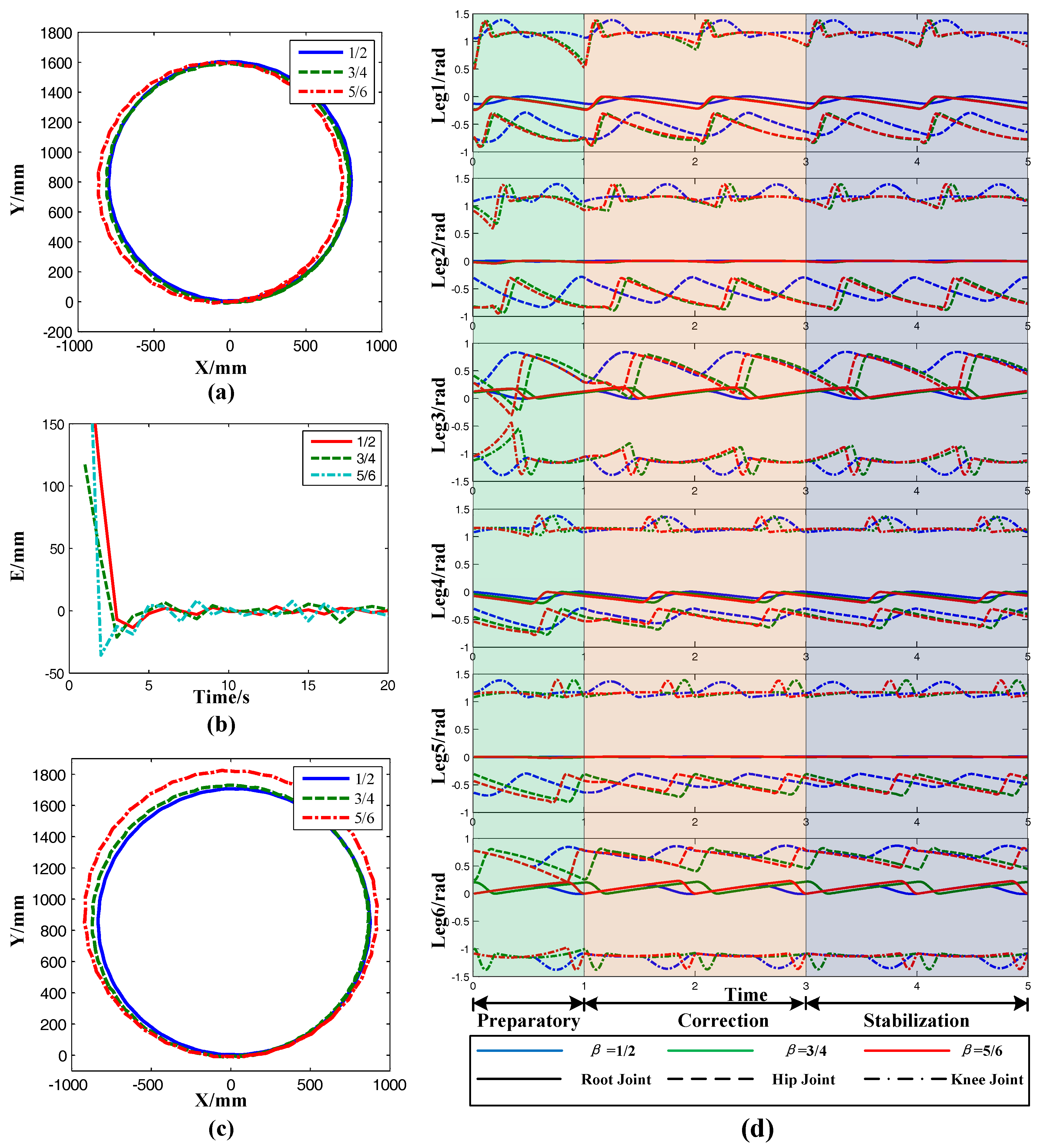
3.2. Radius Correction Simulation
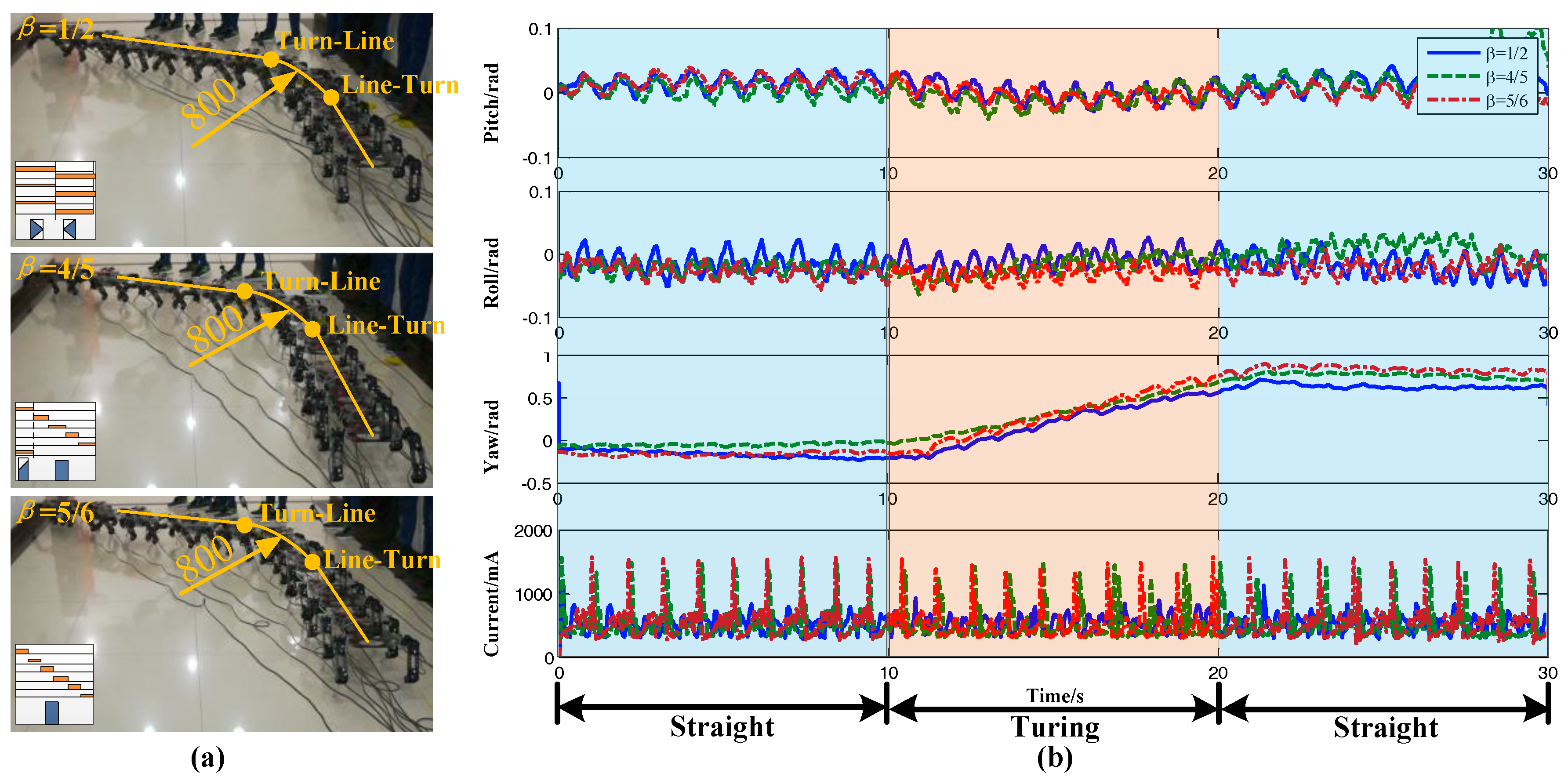
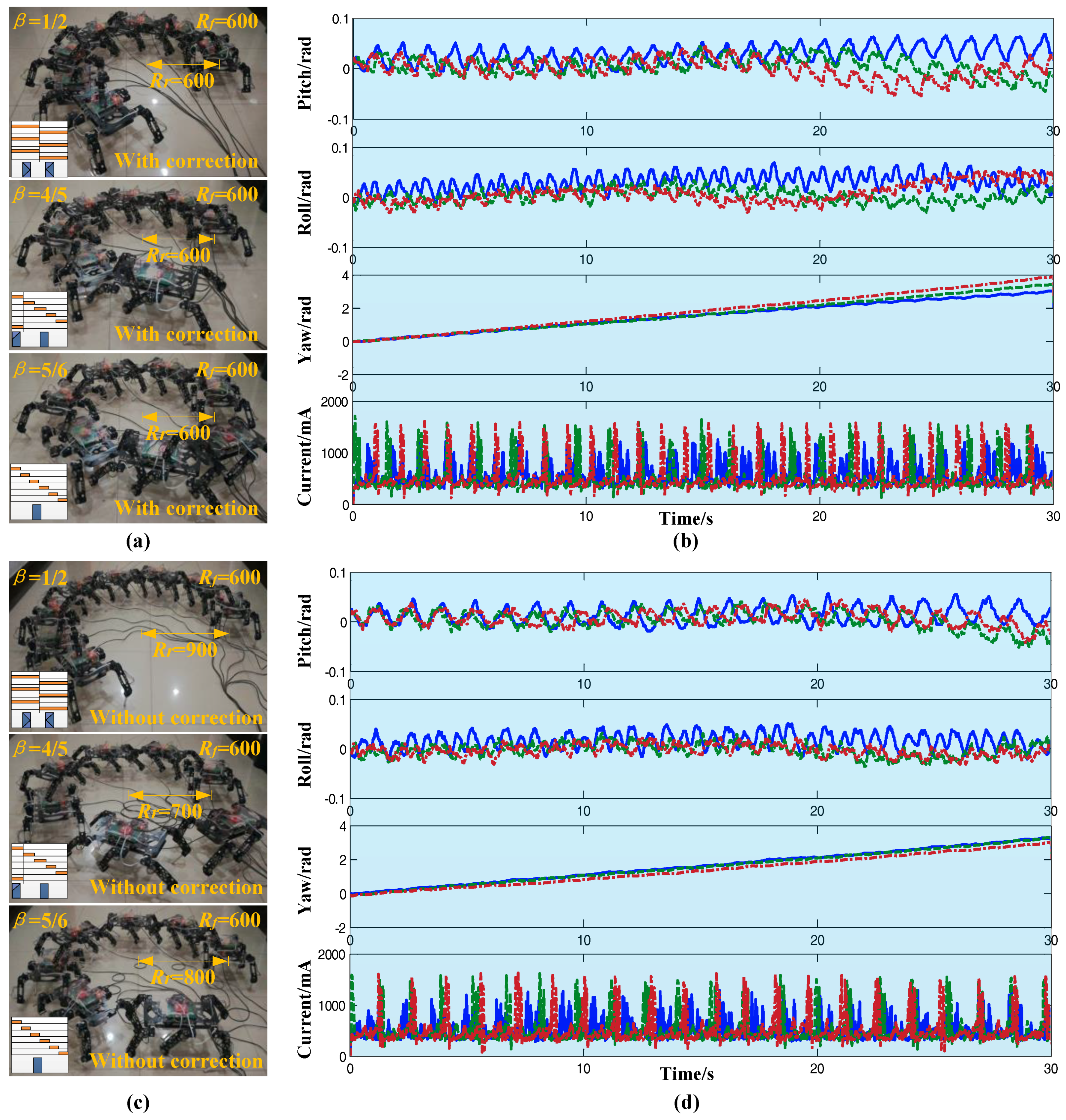
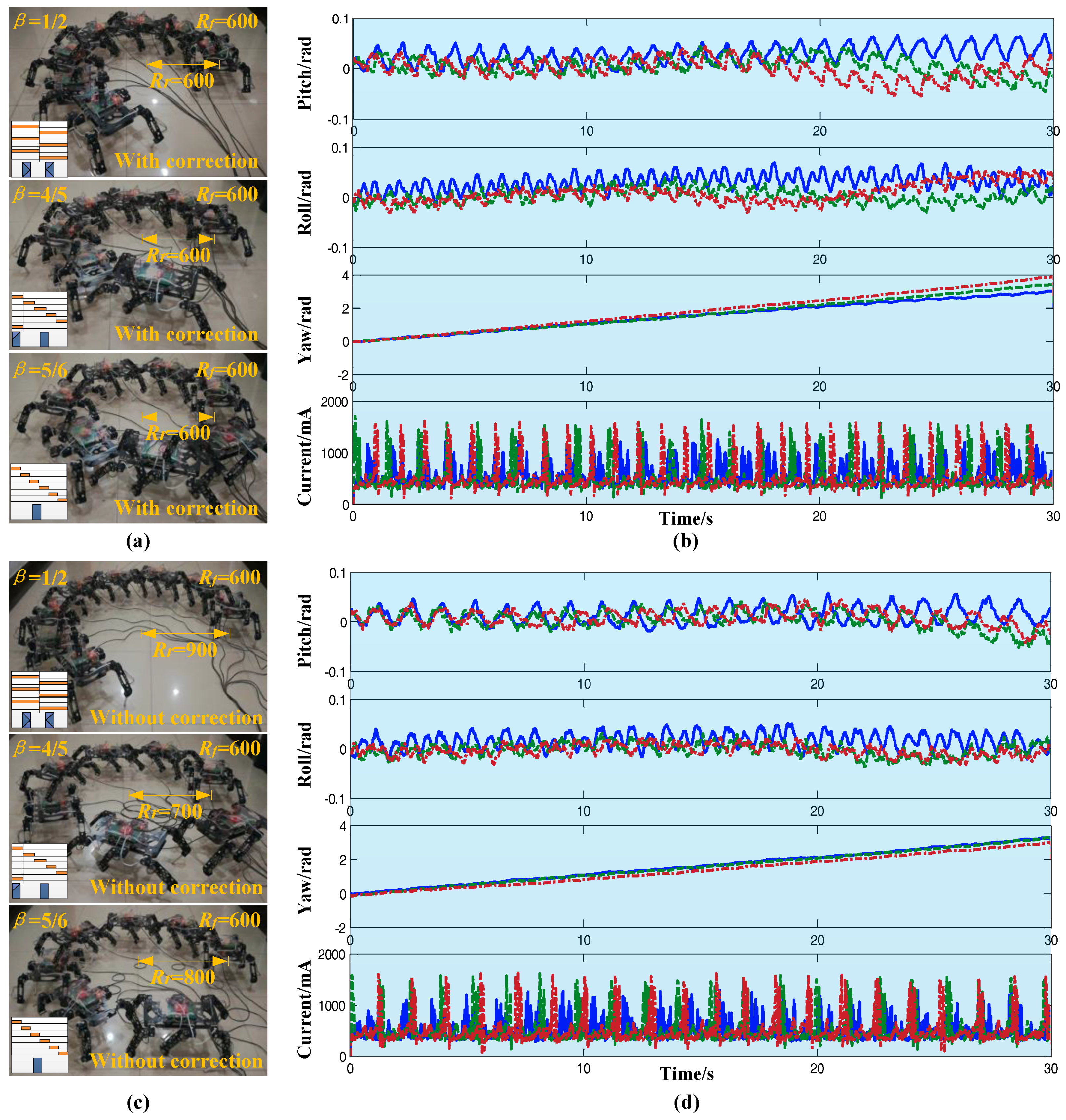
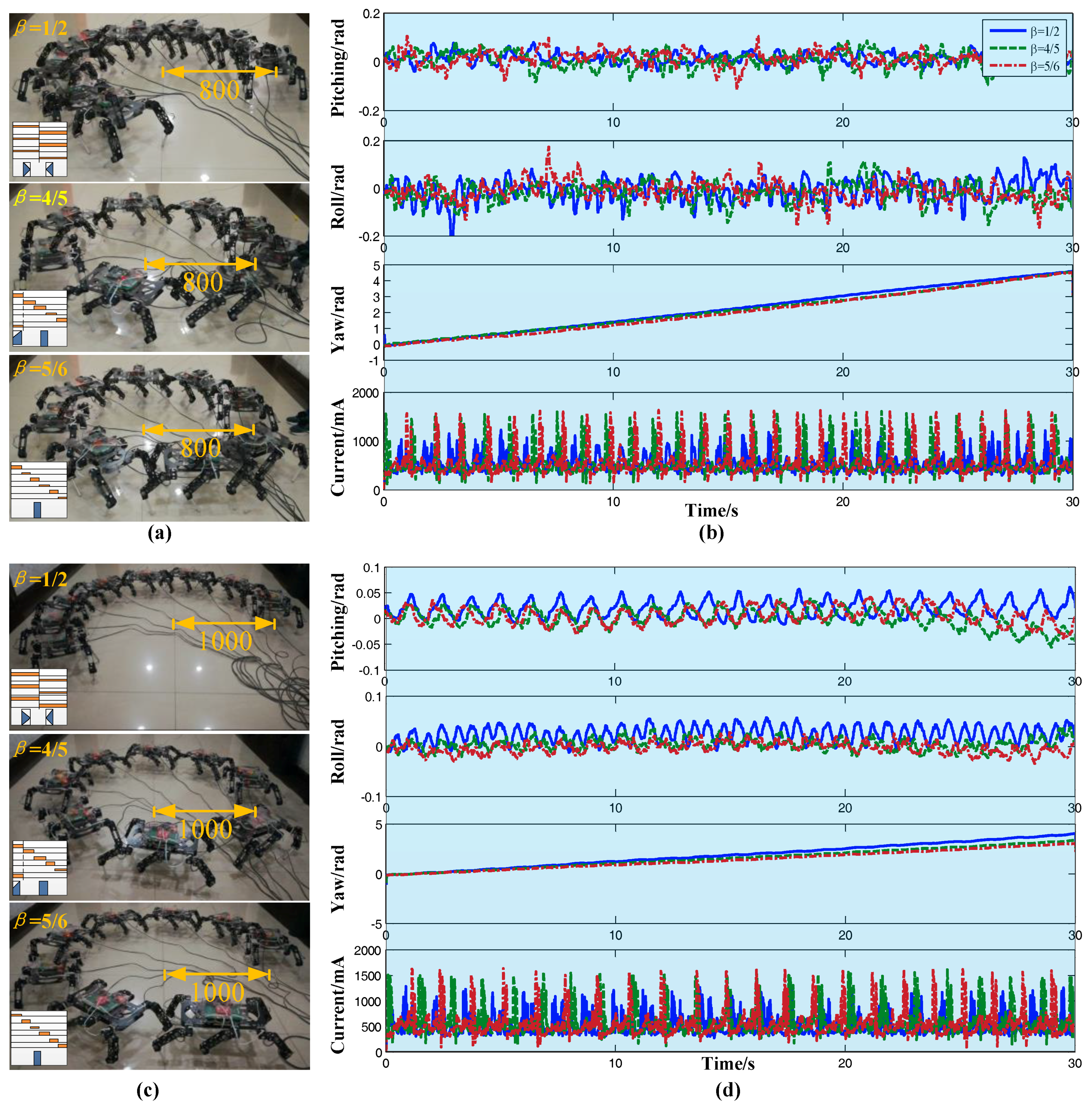
4. Experiments
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Grand, C.; Amar, F.B.; Plumet, F.; Plumet, F.; Bidaud, P. Stability and Traction Optimization of a Reconfigurable Wheel-Legged Robot. Int. J. Robot. Res. 2004, 23, 1041–1058. [Google Scholar] [CrossRef]
- Lee, C.H.; Kim, S.H.; Kang, S.C. Double-track mobile robot for hazardous environment applications. Adv. Robot. 2003, 17, 447–459. [Google Scholar] [CrossRef]
- Du, H.; Gao, F. Fault tolerance properties and motion planning of a six-legged robot with multiple faults. Robotica 2016, 35, 1397–1414. [Google Scholar] [CrossRef]
- Pan, Y.; Gao, F.; Du, H. Fault tolerance criteria and walking capability analysis of a novel parallel-parallel hexapod break walking robot. Robotica 2014, 34, 619–633. [Google Scholar] [CrossRef]
- Zhu, Y.; Guo, T. Galloping Trajectory Generation of a Legged Transport Robot Based on Energy Consumption Optimization. J. Robot. 2016, 2016, 9645730. [Google Scholar] [CrossRef]
- Chen, G.; Jin, B.; Chen, Y. Tripod gait-based turning gait of a six-legged walking robot. J. Mech. Sci. Technol. 2017, 31, 1401–1411. [Google Scholar] [CrossRef]
- Gao, H.; Jin, M.; Liu, Y.; Ding, L. Turning gait planning and simulation validation of a hydraulic hexapod robot. In Proceedings of the 2015 International Conference on Fluid Power and Mechatronics, Harbin, China, 5–7 August 2015; Volume 13, pp. 842–847. [Google Scholar]
- Chen, G.; Jin, B.; Chen, Y. Turning Gait with Constant Radius of Six-legged Walking Robot. J. Zhejiang Univ. (Eng. Sci.) 2014, 48, 1278–1286. [Google Scholar]
- Pratihar, D.K. Optimal turning gait of a six-legged robot using a GA-fuzzy approach. Artif. Intell. Eng. Des. Anal. Manuf. 2000, 14, 207–219. [Google Scholar] [CrossRef]
- Martín, F.; Matellán, V.; Barrera, P.; Cañas, J.M. Localization of legged robots combining a fuzzy-Markov method and a population of extended Kalman filters. Robot. Auton. Syst. 2007, 55, 870–880. [Google Scholar] [CrossRef]
- Yang, J.M. Omnidirectional walking of legged robots with a failed leg. Math. Comput. Model. 2008, 47, 1372–1388. [Google Scholar] [CrossRef]
- Zhou, X.; Bi, S. A survey of bio-inspired compliant legged robot designs. Bioinspir. Biomim. 2012, 7, 041001. [Google Scholar] [CrossRef] [PubMed]
- Kurowski, S.; Von Stryk, O. A systematic approach to the design of embodiment with application to bio-inspired compliant legged robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 3771–3778. [Google Scholar]
- Radkhah, K.; Kurowski, S.; Von Stryk, O. Design considerations for a biologically inspired compliant four-legged robot. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Guilin, China, 19–23 December 2009; pp. 598–603. [Google Scholar]
- Ackerman, J.; Seipel, J. Energetics of bio-inspired legged robot locomotion with elastically-suspended loads. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; Volume 10, pp. 203–208. [Google Scholar]
- Irawan, A.; Nonami, K. Optimal impedance control based on body inertia for a hydraulically driven hexapod robot walking on uneven and extremely soft terrain. J. Field Robot. 2011, 28, 690–713. [Google Scholar] [CrossRef]
- Iwase, E.; Kato, S.; Yasuda, T.; Shimoyama, I. A Turning Gait Generating Network for a Hexapod Robot. J. Robot. Soc. Jpn. 2004, 22, 492–498. [Google Scholar] [CrossRef]
- Jindrich, D.L.; Full, R.J. Many-legged maneuverability: Dynamics of turning in hexapods. J. Exp. Biol. 1999, 202, 1603–1623. [Google Scholar] [PubMed]
- Jindrich, D.L.; Full, R.J. Dynamic stabilization of rapid hexapedal locomotion. J. Exp. Biol. 2002, 205, 2803–2823. [Google Scholar] [PubMed]
- Yang, J. Fault-tolerant crab gaits and turning gaits for a hexapod robot. Robotica 2006, 24, 269–270. [Google Scholar] [CrossRef]
- Solow, B. Modeling and Analysis of Fault Tolerant Gait of a Multi-legged Robot Moving on an Inclined Plane. Procedia Technol. 2014, 14, 93–99. [Google Scholar]
- Chen, W.H.; Liu, T.; Wang, J.H.; Ren, G.J.; Wu, X.M. Sensor signal processing and omnidirectional locomotion control of a bio-inspired hexapod robot. J. Zhejiang Univ. (Eng. Sci.) 2015, 49, 430–438. [Google Scholar]
- Matos, V.; Santos, C.P. Omnidirectional locomotion in a quadruped robot: A CPG-based approach. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; Volume 6219, pp. 3392–3397. [Google Scholar]
- Santos, C.P.; Matos, V. CPG modulation for navigation and omnidirectional quadruped locomotion. Robot. Auton. Syst. 2012, 60, 912–927. [Google Scholar] [CrossRef]
- Stejskal, M.; Mrva, J.; Faigl, J. Road following with blind crawling robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 16–21 May 2016; pp. 3612–3617. [Google Scholar]
- Milicka, P.; Cížek, P.; Faigl, J. On Chaotic Oscillator-based Central Pattern Generator for Motion Control of Hexapod Walking Robot. In Proceedings of the 16th ITAT Conference Information Technologies—Applications and Theory, Matliare, Slovakia, 15–19 September 2016; Volume 1649, pp. 131–137. [Google Scholar]
- Čížek, P.; Milička, P.; Faigl, J. Neural based obstacle avoidance with CPG controlled hexapod walking robot. In Proceedings of the International Joint Conference on Neural Networks, Anchorage, AK, USA, 14–19 May 2017; pp. 650–656. [Google Scholar]
- Birch, L.C. The Intrinsic Rate of Natural Increase of an Insect Population. J. Anim. Ecol. 1948, 17, 15–26. [Google Scholar] [CrossRef]
- Li, F.; Liu, W.; Fu, X.; Bonsignori, G.; Scarfogliero, U.; Stefanini, C.; Dario, P. Jumping like an insect: Design and dynamic optimization of a jumping mini robot based on bio-mimetic inspiration. Mechatronics 2012, 22, 167–176. [Google Scholar] [CrossRef]
- Hoover, A.M.; Burden, S.; Fu, X.Y.; Sastry, S.S. Bio-inspired design and dynamic maneuverability of a minimally actuated six-legged robot. In Proceedings of the 3rd IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, Tokyo, Japan, 26–29 September 2010; Volume 28, pp. 869–876. [Google Scholar]
- Abraham, I.; Shen, Z.H.; Seipel, J. A Nonlinear Leg Damping Model for the Prediction of Running Forces and Stability. J. Comput. Nonlinear Dyn. 2015, 10, 051008. [Google Scholar] [CrossRef]
- Scarfogliero, U.; Stefanini, C.; Dario, P. The use of compliant joints and elastic energy storage in bio-inspired legged robots. Mech. Mach. Theory 2009, 44, 580–590. [Google Scholar] [CrossRef]
- Porta, J.M.; Celaya, E. Reactive free-gait generation to follow arbitrary trajectories with a hexapod robot. Robot. Auton. Syst. 2004, 47, 187–201. [Google Scholar] [CrossRef] [Green Version]
- Xu, K.; Ding, X. Typical Gait Analysis of a Six-legged Robot in the Context of Metamorphic Mechanism Theory. Chin. J. Mech. Eng. 2013, 26, 771–783. [Google Scholar]
- Inaba, K.; Nakazawa, K. Gait Generating Network for Hexapod Robot in Consideration of Fault Tolerance (Mechanical Systems). Trans. Jpn. Soc. Mech. Eng. C 2007, 73, 1196–1201. [Google Scholar] [CrossRef]
- Zhu, Y.; Jin, B.; Wu, Y.; Guo, T.; Zhao, X. Trajectory Correction and Locomotion Analysis of a Hexapod Walking Robot with Semi-Round Rigid Feet. Sensors 2016, 16, 1392. [Google Scholar] [CrossRef] [PubMed]
- Fujii, S.; Inoue, K.; Takubo, T.; Mae, Y. Ladder climbing control for limb mechanism robot “ASTERISK”. In Proceedings of the IEEE International Conference on Roboties and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 3052–3057. [Google Scholar]
- Lee, T.T.; Liao, C.M.; Chen, T.K. On the stability properties of hexapod tripod gait. IEEE J. Robot. Autom. 1988, 4, 427–434. [Google Scholar] [CrossRef]
- Weihmann, T.; Karner, M.; Full, R.J.; Blickhan, R. Jumping kinematics in the wandering spider Cupiennius, salei. J. Comp. Physiol. A 2010, 196, 421–438. [Google Scholar] [CrossRef] [PubMed]
- Zielinska, T.; Heng, J. Development of a walking machine: Mechanical design and control problems. Mechatronics 2002, 12, 737–754. [Google Scholar] [CrossRef]
- Zhu, Y.; Jin, B. Compliance control of a legged robot based on improved adaptive control: Method and experiments. Int. J. Robot. Autom. 2016, 5, 366–373. [Google Scholar] [CrossRef]
- Hosokawa, K.; Yagyu, M.; Nishihara, A. Sensor Data Fusion for Body State Estimation in a Hexapod Robot with Dynamical Gaits. IEEE Trans. Robot. 2006, 22, 932–943. [Google Scholar]
- Xu, X; Yan, G.; Ding, G.; Liu, H. Research on Miniature Hexapod Robot and Its Control System. Comput. Eng. 2002, 28, 2881–2883. [Google Scholar]
- Sakakibara, Y.; Kan, K.; Hosoda, Y.; Hattori, M.; Fujie, M. Foot trajectory for a quadruped walking machine. In Proceedings of the IEEE International Workshop on Intelligent Robots & Systems ’90, ‘Towards A New Frontier of Applications’, Ibaraki, Japan, 3–6 July 1990; Volume 8, pp. 343–360. [Google Scholar]
- Yang, J.M.; Kim, J.H. A strategy of optimal fault tolerant gait for the hexapod robot in crab walking. In Proceedings of the IEEE International Conference on Robotics & Automation, Leuven, Belgium, 20 May 1998; Volume 2, pp. 1695–1700. [Google Scholar]
- Andreev, A.; Zhoga, V.; Serov, V.; Skakunov, V. The Control System of the Eight-Legged Mobile Walking Robot. In Proceedings of the Joint Conference on Knowledge-Based Software Engineering, Volgograd, Russia, 17–20 September 2014; Springer International Publishing: Basel, Switzerland, 2014; Volume 466, pp. 383–392. [Google Scholar]
- Görner, M.; Hirzinger, G. Analysis and evaluation of the stability of a biologically inspired, Leg loss tolerant gait for six- and eight-legged walking robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; Volume 58, pp. 4728–4735. [Google Scholar]
- Shin, H.K.; Kim, B.K. Energy-Efficient Gait Planning and Control for Biped Robots Utilizing Vertical Body Motion and Allowable ZMP Region. IEEE Trans. Ind. Electron. 2015, 62, 2277–2286. [Google Scholar] [CrossRef]
- Collins, S.; Ruina, A.; Tedrake, R.; Wisse, M. Efficient Bipedal Robots Based on Passive-Dynamic Walkers. Science 2005, 307, 1082–1085. [Google Scholar] [CrossRef] [PubMed]
- Westervelt, E.R.; Grizzle, J.W.; Chevallereau, C.; Choi, J.H.; Morris, B. Feedback Control of Dynamic Bipedal Robot Locomotion. Br. J. Philos. Sci. 2007, 4, 302. [Google Scholar]
- Erden, M.S.; Leblebicio; Lu, K. Free gait generation with reinforcement learning for a six-legged robot. Robot. Auton. Syst. 2008, 56, 199–212. [Google Scholar] [CrossRef]
- Raibert, M.; Blankespoor, K.; Nelson, G.; Playter, R. BigDog, the Rough-Terrain Quadruped Robot. IFAC Proc. Vol. 2008, 41, 10822–10825. [Google Scholar] [CrossRef]
- Estremera, J.; Cobano, J.A.; Santos, P.G.D. Continuous free-crab gaits for hexapod robots on a natural terrain with forbidden zones: An application to humanitarian demining. Robot. Auton. Syst. 2010, 58, 700–711. [Google Scholar] [CrossRef] [Green Version]
- Boaventura, T.; Semini, C.; Buchli, J.; Frigerio, M. Dynamic torque control of a hydraulic quadruped robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; Volume 162, pp. 1889–1894. [Google Scholar]
- Jeong, W.Y.; Kim, H.K.; Kim, S.B.; Jun, B.H. Path tracking controller design of hexapod robot for omni-directional gaits. In Proceedings of the 9th Asian Control Conference, Istanbul, Turkey, 23–26 June 2013; pp. 1–6. [Google Scholar]
- Spröwitz, A.; Tuleu, A.; Vespignani, M.; Badri, E.; Ijspeert, A.J. Towards dynamic trot gait locomotion: Design, control, and experiments with Cheetah-cub, a compliant quadruped robot. Int. J. Robot. Res. 2013, 32, 932–950. [Google Scholar] [CrossRef]
- Chou, Y.C.; Huang, K.J.; Yu, W.S.; Lin, P.C. Model-Based Development of Leaping in a Hexapod Robot. IEEE Trans. Robot. 2015, 31, 40–54. [Google Scholar] [CrossRef]
- Bjelonic, M.; Kottege, N.; Beckerle, P. Proprioceptive control of an over-actuated hexapod robot in unstructured terrain. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Korea, 9–14 October 2016; pp. 2042–2049. [Google Scholar]
- Inagaki, S.; Niwa, T.; Suzuki, T. Follow-the-Contact-Point gait control of centipede-like multi-legged robot to navigate and walk on uneven terrain. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 5341–5346. [Google Scholar]
- Fukuoka, Y.; Kimura, H. Dynamic Locomotion of a Biomorphic Quadruped ‘Tekken’ Robot Using Various Gaits: Walk, Trot, Free-Gait and Bound. Appl. Bionics Biomech. 2009, 6, 63–71. [Google Scholar] [CrossRef]
- Wang, H.; Ruan, J.; Li, Y. A novel walking control method for the pace gait of a quadruped robot. In Proceedings of the 3rd International Conference in Mechanical, Information and Industrial Engineering, Kitakyushu, Japan, 28–31 March 2015; pp. 260–265. [Google Scholar]
- Smith, J.A. Galloping in an Underactuated Quadrupedal Robot. Int. J. Robot Autom. 2015, 30, 1–19. [Google Scholar] [CrossRef]
- Ma, S.; Yu, L.; Miao, G. Dynamics analysis and simulation on quadruped robot in passive bound gait. China Mech. Eng. 2008, 19, 2677–2680. [Google Scholar]
- Boaventura, T.; Medrano-Cerda, G.A.; Semini, C.; Buchli, J. Stability and performance of the compliance controller of the quadruped robot HyQ. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1458–1464. [Google Scholar]
- Kani, M.H.H.; Derafshian, M.; Bidgoly, H.J.; Ahmadabadi, M.N. Effect of flexible spine on stability of a passive quadruped robot: Experimental results. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Karon Beach, Thailand, 7–11 December 2011; pp. 2793–2798. [Google Scholar]
- Meek, S.; Kim, J.; Anderson, M. Stability of a trotting quadruped robot with passive, underactuated legs. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 347–351. [Google Scholar]
- Seok, S.; Wang, A.; Meng, Y.C.; Otten, D.; Lang, J.; Kim, S. Design principles for highly efficient quadrupeds and implementation on the MIT Cheetah robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3307–3312. [Google Scholar]
- Xiao, W.; Wang, W. Hopf oscillator-based gait transition for a quadruped robot. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Bali, Indonesia, 5–10 December 2015; pp. 2074–2079. [Google Scholar]
- Smith, J.A.; Poulakakis, I. Rotary gallop in the untethered quadrupedal robot scout II. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2556–2561. [Google Scholar]
- Zou, J.; Pu, H.; Shen, Y.; Sun, Y. Optimized non-reciprocating tripod gait for a hexapod robot with epicyclic-gear-based eccentric paddle mechanism. In Proceedings of the IEEE International Conference on Robotics and Bio-Inspiriteds, Zhuhai, China, 6–9 December 2015; pp. 564–569. [Google Scholar]
- Silva, M.F.; Machado, J.A.T.; Lopes, A.M.; Tar, J.K. Gait selection for quadruped and hexapod walking systems. In Proceedings of the 2nd IEEE International Conference on Computational Cybernetics, Vienna, Austria, 30 August–1 September 2004; pp. 217–222. [Google Scholar]
- Inagaki, K.; Kobayashi, H. Adaptive wave gait for hexapod synchronized walking. In Proceedings of the IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; Volume 2, pp. 1326–1331. [Google Scholar]
- Fu, C.; Jie, Z.; Zang, X.Z.; Yan, J.H. Free gait generation method for omnidirectional locomotion on abrupt terrain with multi-legged biomimetic robot. J. Harbin Inst. Technol. (New Ser.) 2011, 18, 101–106. [Google Scholar]
- Su, J.; Chen, X.D.; Gang, T.W. A Study of the Omnidirectional Gait for a Hexapod Walking Robot. Mach. Electron. 2004, 3, 48–52. [Google Scholar]
- Irawan, A.; Nonami, K. Force Threshold-Based Omni-directional Movement for Hexapod Robot Walking on Uneven Terrain. In Proceedings of the Fourth International Conference on Computational Intelligence, Modelling and Simulation, Kuantan, Malaysia, 25–27 September 2012; pp. 127–132. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficient | The Value of β | |||
| β = 1/2 | β = 3/4 | β = 4/5 | β = 5/6 | |
| a | 0.6772 | 0.8625 | 0.7577 | 0.6873 |
| b | −49.12 | −21.83 | −9.204 | 3.769 |
| Parameters | Value | Parameters | Value | Parameters | Value |
|---|---|---|---|---|---|
| p00 | 4573 | p30 | −1.617 × 104 | p13 | −2.87 × 10−5 |
| p10 | −2.15 × 104 | p21 | −275.8 | p04 | 3.206 × 10−9 |
| p01 | −39.86 | p12 | −0.1154 | p32 | −0.114 |
| p20 | 3.26 × 104 | p03 | 6.231 × 10−6 | p23 | 2.834 × 10−5 |
| p11 | 184.9 | p31 | 136 | p14 | −3.936 × 10−9 |
| p02 | 0.02298 | p22 | 0.1976 | p05 | −5.895 × 10−13 |
| Parameters | Symbol | Value |
|---|---|---|
| Duty factor | β | 1/2, 4/5, 5/6 |
| Turning radius | Rturning | 600 mm, 800 mm, 1000 mm |
| Straight radius | RStraight | Inf |
| Running time | T | 30 s |
| The moment of straight to turning | TS-T | 10 s |
| The moment of turning to straight | TT-S | 20 s |
| Gait period | Tperiod | 1 s |
| Robot (Year) | Leg Number | Gait Form | Movement Form | DOF/Leg | Actuation |
|---|---|---|---|---|---|
| Robot-EA308 (Erden et al. 2007) [51] | 6 | Free Gait | Going Straight | 3 | Servo Motors |
| BigDog (Raibert et al. 2008) [52] | 4 | Crawl Gait Trot Gait | Omnidirectional | 4 | Hydraulic Drive Linear Spring |
| SILO-6 (Estremera et al. 2010) [53] | 6 | free-crab gait | 3 | Servo Motors | |
| COMET-IV (Irawan et al. 2012) [41] | 6 | Tripod Gait | Omnidirectional | 4 | Hydraulic Drive |
| HYQ (Boaventura et al. 2012) [54] | 4 | Cycle Gait | Trot Squat jump | 3 | Hydraulic Drive |
| Hexapod Robot (Jeong et al. 2013) [55] | 6 | Tripod Gait | Going Straight | 3 | Servo Motors |
| Cheetah-cub robot (Spröwitz et al. 2013) [56] | 4 | Trot Gait | Going Straight | 2 | Servo Motors with Cam Linear Spring Cable Mechanism |
| RHex-style hexapod robot (Chou et al. 2015) [57] | 6 | Leaping Running | Tripod Gait | 1 | Servo Motors Elastic Structure |
| Weaver (Bjelonic et al. 2016) [58] | 6 | Tripod Gait Wave Gait | 5 | Servo Motors | |
| Robot in this paper (2017) | 6 | Arbitrary gait (1/2 ≤ β ≤ 5/6) | Omnidirectional | 3 | Servo Motors |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; Guo, T.; Liu, Q.; Zhu, Q.; Jin, B.; Zhao, X. Turning and Radius Deviation Correction for a Hexapod Walking Robot Based on an Ant-Inspired Sensory Strategy. Sensors 2017, 17, 2710. https://doi.org/10.3390/s17122710
Zhu Y, Guo T, Liu Q, Zhu Q, Jin B, Zhao X. Turning and Radius Deviation Correction for a Hexapod Walking Robot Based on an Ant-Inspired Sensory Strategy. Sensors. 2017; 17(12):2710. https://doi.org/10.3390/s17122710
Chicago/Turabian StyleZhu, Yaguang, Tong Guo, Qiong Liu, Qianwei Zhu, Bo Jin, and Xiangmo Zhao. 2017. "Turning and Radius Deviation Correction for a Hexapod Walking Robot Based on an Ant-Inspired Sensory Strategy" Sensors 17, no. 12: 2710. https://doi.org/10.3390/s17122710
APA StyleZhu, Y., Guo, T., Liu, Q., Zhu, Q., Jin, B., & Zhao, X. (2017). Turning and Radius Deviation Correction for a Hexapod Walking Robot Based on an Ant-Inspired Sensory Strategy. Sensors, 17(12), 2710. https://doi.org/10.3390/s17122710